三维观察
三维变换及三维观察
x
y
y
0 0 0 1 0 0 0 1 0 0 0 s
x
y
z
x s s
y s
式中s≥1 时,图形整体缩小;
0<s<1时,图形整体放大;
s<0时,图形关于原点做对称等比变换, 当-1<s<0时,图形关于原点做对称整体放大;
当s<-1,图形关于原点做对称整体缩小。
需要注意的是,由于使用的三维坐标系一般是右手坐标系, 因此当沿坐标轴往坐标原点看过去时,沿逆时针方向旋转 的角为正向旋转角,如图所示,即满足右手法则,大拇指 指向旋转轴的正方向,四指转的方向为旋转正方向。反向 旋转将旋转角取负值即可。
三维基本几何变换——旋转变换
绕Z轴旋转时,三维物体的z坐标
保持不变,而x,y坐标发生变化,
三维基本几何变换——旋转变换
z
y X
图7-3 三维旋转的方向与角度
17
三维基本几何变换——旋转变换
三维旋转变换可以分解为多次的二维旋转变换。分别取x,y, z为旋转轴,绕每个旋转轴的三维旋转可以看成是在另外两
个坐标轴组成的二维平面上进行的二维旋转变换,而将二
维旋转变换组合起来,就可得到总的三维旋转变换。
T
1 RZ
cos( ) sin( ) sin( ) cos( ) 0 0 0 0
37
三维复合变换
同二维复合变换类似,三维复合变换是指图形作一次以上的变
换。三维复合变换也具有同样的齐次坐标计算形式,变换结果
是每次变换矩阵的乘积。
P' P T P (T1 T2 T3 Tn )
三维影像观察天气变化

三维影像观察天气变化随着科技的飞速发展,我们观察和预测天气的方式也在不断进化。
从最初的肉眼观测到后来的雷达扫描,再到现在的三维影像技术,每一次技术的革新都极大地提升了我们对天气变化的理解和预测能力。
想象一下,如果我们把天气比作一幅巨大的画卷,那么三维影像技术就是那支能够描绘出画中每一个细节的画笔。
它不仅能够捕捉到云层的厚度、风速的变化,甚至能够精确到雨滴的大小和分布。
这种技术的引入,无疑为气象学家们提供了一把打开天气奥秘之门的钥匙。
然而,尽管三维影像技术在观察天气变化方面有着无可比拟的优势,但它并非万能。
正如一枚硬币有正反两面,这项技术也存在着一定的局限性。
例如,它对设备的精度要求极高,任何微小的误差都可能导致预测结果的偏差。
此外,三维影像技术虽然能够提供大量数据,但这些数据的解读和分析需要极高的专业知识和经验。
那么,我们应该如何更好地利用三维影像技术来观察和预测天气变化呢?首先,我们需要不断提升设备的精度和稳定性,确保收集到的数据准确无误。
其次,我们应该加强专业人才的培养,提高他们对数据的解读和分析能力。
最后,我们还应该探索将三维影像技术与其他技术相结合的可能性,以实现更全面、更准确的天气预测。
在这个过程中,我们可能会遇到各种挑战和困难。
但是,正如攀登一座高山需要克服重重困难一样,只有不断努力和探索,我们才能最终到达山顶,揭示出天气变化的真相。
三维影像技术在观察和预测天气变化方面具有巨大的潜力和价值。
然而,我们也应该清醒地认识到它的局限性,并努力克服这些局限,以更好地利用这项技术为人类服务。
在未来的日子里,让我们期待着三维影像技术在气象领域的更多突破和应用,为我们的生活带来更多的便利和保障。
第十九课(动态观察器和三维实体)

(动态观察器和三维实体)
一、三维动态观察器(右击工具栏——三维导航)
1、三维平移(手形):视图沿拖动的方向水平、垂直或对
角移动。
2、三维缩放(带+-号的放大镜):+表示放大,-表示缩小。
3、三维动态观察:用户可通过圈内、圈外和圈上的4个点
按住拖动来改变观察对象。
4、三维连续观察:鼠标拖动方向并停止但可延指定的方向
连续观察
5、受约束的动态观察:沿XY平面或Z轴约束三维动态观
察。
二、绘制基本的三维实体
1、绘制多段体
方法:绘图——建模——多段体
命令:polysolid
2、长方体
方法:方法:绘图——建模——长方体
命令:box
3、绘制楔体
方法:绘图——建模——楔体
命令:wedge
4、圆柱体
方法:绘图——建模——圆柱体命令:cylinder
5、绘制圆锥体
方法:绘图——建模——圆锥体命令:cone
6、绘制球体
方法:绘图——建模——球体命令:sphere
7、绘制圆环体
方法:绘图——建模——圆环体命令:torus
8绘制棱维面
方法:绘图——建模——棱维面命令:pyramid。
简述三维观察流程及各变换主要内容

简述三维观察流程及各变换主要内容下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!三维观察流程及其主要变换的简述在计算机图形学和相关领域中,三维观察是一个关键的过程,它涉及到将三维模型转化为我们在屏幕上看到的二维图像。
计算机辅助设计_12观察与渲染三维图形

在图形中,可以通过放置相机来定义三维视图;可以打开或关闭相机并使 用夹点来编辑相机的位置、目标或焦距;可以通过位置XYZ坐标、目标XYZ坐 标和视野/焦距(用于确定倍率或缩放比例)定义相机。
2019/7/4
微机辅助设计(一)主讲邓铁桥
7
12.2.2 创建相机
单击“菜单浏览器”按钮,在弹出的菜单中选择“视图”|“创建相机”命 令(CAMERA),或在“功能区”选项板中选择“常用”选项卡,在“视图”面 板中单击“创建相机”按钮,可以设置相机和目标的位置,以创建并保存对象 的三维透视图。
控制相机运动路径的方法 设置运动路径动画参数 创建运动路径动画
2019/7/4
微机辅助设计(一)主讲邓铁桥
12
12.3.1 控制相机运动路径的方法
可以通过将相机及其目标链接到点或路径来控制相机运动,从而控制动画。要使 用运动路径创建动画,可以将相机及其目标链接到某个点或某条路径。
如果要相机保持原样,则将其链接到某个点;如果要相机沿路径运动,则将其链 接到路径上。
1
12.1 使用三维导航工具
三维导航工具允许用户从不同的角度、高度和距离查看图形中的对象。用 户可以使用以下三维工具在三维视图中进行动态观察、回旋、调整距离、缩 放和平移。
受约束的动态观察 自由动态观察 连续动态观察
2019/7/4
微机辅助设计(一)主讲邓铁桥
2
12.1.1 受约束的动态观察
2019/7/4
微机辅助设计(一)主讲邓铁桥
10
12.2.5 回旋
单击“菜单浏览器”按钮,在弹出的菜单中选择“视图”|“回旋”命令 (3DSWIVEL),可以在拖动方向上模拟平移相机。可以沿 XY 平面或 Z 轴回旋 视图。
计算机图形学三维观察在生活的应用800字
计算机图形学三维观察在生活的应用800字三维技术给生活带来的便利:三维技术能够清楚生动地展现了工业产品的工作过程、设计原理、特殊性能等,使观看者更加自觉主动地接受,携带三维技术可以随时随地完美展示产品,而且是能够给详细、完善的展示产品,突破以前不能拍摄的产品内部,消除只能用文字照片说明的瓶颈。
三维技术具备更灵活的表达、更强的说服力、工业产品的外观、结构、功能、生产过程等的多方面演示。
尤其是眼睛看不到的原子、分子、电磁、化学反应等都能够用三维动画直观地表现。
成功申报或工程投标时,可以迅速向客户告知原理和特点,充分说明产品的特点和优点。
随着市场经济的发展,当今三维动画作为多媒体时代的重要组成部分被越来越广泛地使用,并逐渐取代PPT的阶段。
三维仿真动画使用MAYA、3Dmax等3D制作软件,准确模拟机器的形状、材料、零件等,售后时三维技术可以大大改善客户的运营和自我维护部分,也可以作为员工的内部教育。
在建筑领域,利用三维技术制造各种与楼盘相关的美景,结合鸟瞰,俯视,穿梭,长距离等任意游览让客户更直接的了解楼盘,增加购买欲望。
在规划领域,利用三维动画技术展示各种道路、桥梁、及各种市政规划、城市规划、城市形象展示、数字化城市等动画制作。
在动画制作,利用从简单的几何体模型到复杂的人物模型,单个的模型展示,到复杂的场景如道路、桥梁、隧道、市政、小区等线型工程和场地工程的景色表现的淋漓尽致。
在园林景观领域:园林景观动画将传统的规划方案,从纸上或沙盘上演变到了电脑中,真实还原了一个虚拟的园林景观。
使得用3D软件制作出的植物更加真实生动,动画在植物种类上也积累了大量的数据资料,使得园林景观植物动画如虎添翼。
计算机图形学是一种使用数学算法将二维或三维图形转化为计算机显示器的栅格形式的科学;图形图像处理泛指如何对各类图形或图像进行各种处理;人工智能是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学;模式识别是人类的一项基本智能,在日常生活中,人们经常在进行“模式识别”。
第十三讲 三维实体模型及观察
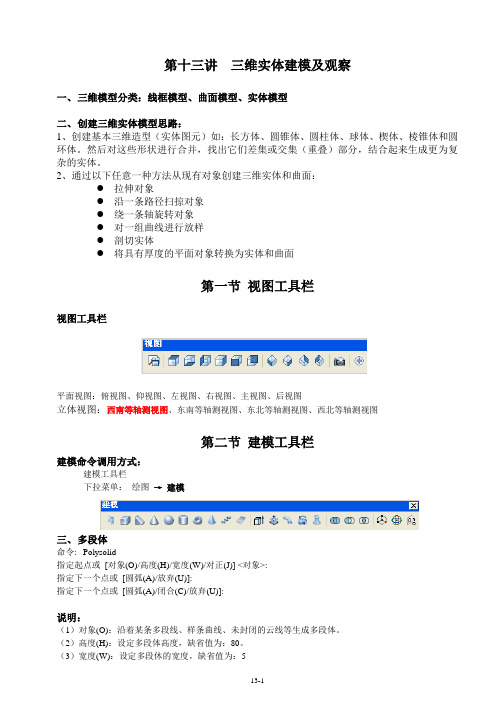
第十三讲三维实体建模及观察一、三维模型分类:线框模型、曲面模型、实体模型二、创建三维实体模型思路:1、创建基本三维造型(实体图元)如:长方体、圆锥体、圆柱体、球体、楔体、棱锥体和圆环体。
然后对这些形状进行合并,找出它们差集或交集(重叠)部分,结合起来生成更为复杂的实体。
2、通过以下任意一种方法从现有对象创建三维实体和曲面:●拉伸对象●沿一条路径扫掠对象●绕一条轴旋转对象●对一组曲线进行放样●剖切实体●将具有厚度的平面对象转换为实体和曲面第一节视图工具栏视图工具栏平面视图:俯视图、仰视图、左视图、右视图、主视图、后视图立体视图:西南等轴测视图、东南等轴测视图、东北等轴测视图、西北等轴测视图第二节建模工具栏建模命令调用方式:建模工具栏下拉菜单:绘图→建模三、多段体命令: _Polysolid指定起点或[对象(O)/高度(H)/宽度(W)/对正(J)] <对象>:指定下一个点或[圆弧(A)/放弃(U)]:指定下一个点或[圆弧(A)/闭合(C)/放弃(U)]:说明:(1)对象(O):沿着某条多段线、样条曲线、未封闭的云线等生成多段体。
(2)高度(H):设定多段体高度,缺省值为:80。
(3)宽度(W):设定多段休的宽度,缺省值为:5(4)对正(J):输入对正方式[左对正(L)/居中(C)/右对正(R)] <居中>:四、长方体命令: _box指定第一个角点或[中心(C)]: 输入底面的第一角点指定其他角点或[立方体(C)/长度(L)]: 输入底面的第二角点指定高度或[两点(2P)]: 输入长方体高度说明:(1)中心(C):输入底面的中心。
(2)立方体(C):画立方体,长、宽、高相等。
(3)两点(2P):输入两点,确定高度。
五、楔体六、圆锥体用法一:以圆作底面创建圆锥体的步骤指定底面中心点。
指定底面半径或直径。
指定圆锥体的高度。
用法二:以椭圆作底面创建圆锥体的步骤输入e(椭圆)。
指定第一条轴的一个端点。
三维视角怎么写

三维视角怎么写在写作中运用三维视角是一种有效的手法,它可以为读者提供更全面和深入的了解。
下面是一些关于如何写作三维视角的建议:1. 多角度观察在写作过程中,对于所描述的人物、事物或情景,不仅要从一个角度进行描写,而是要尽可能多地运用不同的视角。
通过多个视角的呈现,读者可以更加全面地了解到所描述对象的各个方面,从而更好地体验到故事的复杂性和丰富性。
2. 视角的切换在文字描写中,可以通过不同角色的视角切换来呈现多维的描述。
例如,通过主角、配角、旁观者或故事中的其他人物的视角切换,可以为读者呈现不同角度的见解和感受。
这种切换可以增加故事的层次感和趣味性,使读者更加投入其中。
3. 各个维度的描绘在运用三维视角时,不仅要考虑到时间和空间的维度,还要思考其他可能存在的维度。
例如,可以考虑情感、文化、环境等维度,从而使读者对故事或描述的对象有更深入的理解。
通过综合考虑各个维度,可以使写作更加丰富多样,给读者带来更丰富的阅读体验。
4. 细节与整体的平衡在运用三维视角时,需要注意细节与整体的平衡。
即使是通过多个视角来呈现故事或描述,也要保持整体的连贯性和完整性。
细节的描写应当有利于整体情节的推进和读者对故事的理解,过多或无关的细节可能会分散读者的注意力,影响阅读体验。
5. 语言的选择在运用三维视角时,要选择适当的语言来呈现不同视角的描写。
对于不同的视角,语言可以选择不同的风格和词汇,使读者在阅读时能够感受到视角的差异。
同时,还要注意语言的流畅性和易读性,不过多使用复杂的词汇或句子结构,以免影响读者的阅读体验。
以上是关于如何写作三维视角的一些建议,希望对您有所帮助。
在运用三维视角时,要根据具体情况进行灵活运用,以达到更好的写作效果。
世界场景中三维观察变换的实现

?
三维观察坐标系的建立
挑 选一个 世界 坐标 点, 称为 观察 参考点 , 使 该点 成为 观察 坐 标 系的 原 点 ’ 该 观察 参 考 点可 以 选 择在 靠
? ’ ? 建立观 察参 考点
近 物体 的位置 或场 景中 某物 体的 表面 位置 , 也可 以选 择物 体的 中心 点或 某组 物体 的中 心点 , 或者 选择 距显 示 的物 体前部 有一 段距 离的 点 ’ 观察 参考点 类似 于观 察 的位 置 , 若 选靠 近 物体 或 在 物 体中 的 点, 则 可将 该 点 看成 是人走 近物 体进 行观 察; 若选 择与场 景有 一段 距离 的点 , 则 可将 该点看 成是 人处 在距 场景 有一 定距 离 的地 点进行 观察 ’ ? ’ ! 建立 ! " 轴 的正 方向 定 义一 个垂 直于 观察方 向的 平面 , 称 为观 察平 面 ’ 显 然, 观 察平 面总 与 # " $ " 平 面平 行, 对 象到 观察 平面 的投 影与 场景 在输 出设 备上 的显 示相 对应 ’ 定义 观察 平面 的法 向量 ! 为正 ! " 轴方 向 , 即 正 ! " 轴方 向 为观 察 方向 的反方 向 ’ 建立 !" 的方 向仅 需要 ! 的 方向 , 与 其模无 关, 因为 可计 算 ! 得到 规范 化单位 向量 , 如图! 所示’
第 !" 卷
第# 期
吉首大学学报 ( 自 然 科 学 版) ,%-./0& %1 ,234%- 5/267 .3289( (08-.0& :;27/;7 <=282%/ )
$% & ’!"
(% ’ #
!))* 年 + 月
铁素体-珠光体钢中微裂纹的断裂起始位置的三维观察(改)

铁素体-珠光体钢中微裂纹的断裂起始位置的三维观察名古屋大学足立教授,使用全自动逐层切片成像系统(Genus_3D),对铁素体-珠光体钢中微裂纹的断裂起始位置进行了研究。
首先利用全自动逐层切片成像技术对微裂纹与微观结构之间的关系进行了三维观察。
采用硝酸腐蚀前后两种显微照片,分别获得微裂纹和微观结构的三维图像。
两幅三维图像叠加后发现,铁素体-珠光体边界处出现微裂纹,并扩展到珠光体晶粒内。
三维逐层切片观察三维逐层切片观察步骤采用三维逐层切片观察技术对试件的微裂纹进行了测量。
用的是Genus_3D,是一种全自动的逐层切片成像设备(图12所示)。
在逐层切片过程中,用1%硝酸浸蚀试样,并分别对腐蚀前和腐蚀后的试样进行拍照。
在下面的描述中,对未蚀刻表面和蚀刻表面的观察分别称为观察(1)和观察(2)。
图13为逐层切片过程流程图。
图12.Genus_3D的结构图13.逐层切片流程图以0.745μm层厚抛光,共获得175张光学显微组织图像的观察(1)和观察(2)的结果。
视场大小为3190 μm×2400μm,总共累计逐层切片深度为129.6μm。
使用三维重构软件,建立微裂纹和微观组织的三维图像。
图14显示了构建三维图像的过程示意图。
利用观察(1)得到的未蚀刻断面图像,构建微裂纹的三维图像。
利用观察(2)得到的蚀刻断面图像,构建微观结构的三维图像。
这两幅图像都是首先清理,以消除抛光缺陷,孔洞和夹杂物。
通过对观测得到的逐层切片图像进行提取,分别独立构建相应的微裂纹三维图像(1),由于观测精度的原因,无法获得长度小于10 μm的微裂纹。
结果得到42条完整形状的微裂纹作为三维图像。
另一方面,利用观察得到的经过清洗的序列切片图像,直接构建微观结构的三维图像(2)。
为了明确微裂纹萌生部位,对微裂纹和微观结构进行了三维图像叠加。
图15为珠光体微裂纹透视图,图14为三维结构图像横截面上“E”的特写。
裂纹产生的原因是裂纹形成后的塑性变形。
三维影像观察天气变幻

三维影像观察天气变幻在科技的海洋中,我们如同探险者,不断发现新的奥秘。
最近,一项令人瞩目的技术——三维影像观察天气变幻,如同一颗璀璨的明珠,吸引了无数人的目光。
它以其独特的魅力,为我们打开了一扇通往未知世界的大门。
首先,让我们来想象一下这个技术的场景。
在一片广袤无垠的蓝天下,云层如同一幅流动的画卷,时而聚集,时而散去。
而三维影像观察技术就像一位神奇的画家,用其手中的画笔,将这些变幻莫测的景象一一捕捉下来,呈现在我们的眼前。
这就像是我们在欣赏一场大自然的交响乐,每一个音符都充满了力量和美感。
然而,这项技术并非只是简单地记录下这些美丽的画面。
它还具有深远的意义。
通过三维影像观察天气变幻,我们可以更加准确地预测未来的天气情况。
这对于农业生产、交通运输、能源供应等各个领域都有着重要的影响。
它就像是一把锐利的剑,帮助我们在面对自然的挑战时,能够更加从容不迫。
但是,我们也不得不面对一个现实的问题:这项技术的发展是否会带来一些潜在的风险?正如一枚硬币有正反两面,科技的进步也是如此。
我们不能忽视它可能带来的负面影响。
例如,过度依赖这项技术可能会导致我们对自然的感知能力下降,甚至可能会引发一些道德和伦理的问题。
因此,我们需要在享受科技成果的同时,也要时刻保持警惕,防止被科技所控制。
此外,我们还需要考虑一个问题:这项技术是否真的能够完全准确地预测天气?虽然目前的研究表明,它的准确率已经相当高,但是我们也不能排除未来出现的一些意外情况。
毕竟,天气是一个复杂而又多变的系统,任何一个小小的变化都可能引发连锁反应。
因此,我们需要保持谦虚的态度,不断地学习和探索。
最后,我想说,三维影像观察天气变幻这项技术就像是一座桥梁,连接了人类与自然的关系。
它让我们有机会更加深入地了解这个世界,也让我们有机会更加珍惜和保护这个世界。
让我们一起期待它的未来发展吧!。
【高中生物】新显微镜可三维观察癌症活体细胞

【高中生物】新显微镜可三维观察癌症活体细胞
在关于哪些因素可以改变细胞与周围环境相互作用的研究中,研究人员发明了一种显
微镜,可用于三维观察活体癌症细胞,而且每个方向像素都很高。
在此之前,高像素活体成像一直用玻璃片上培养的细胞进行,这种方式会让样本变平。
由于活体细胞对其周围环境高度敏感,因此用胶原质代替玻璃片的新微观方法有助于揭示
更加自然的行为。
这种叫做微环境选择性平面照明设备显微镜(mespim)的技术利用又短又粗的激光束
在样本中产生荧光,并使其闪烁,它可以阐明大至300纳米的细节。
同时在模拟真实组织的样本中又可以保持较广泛的视野。
这可以让研究人员观察复杂
的过程,如在癌症和非癌症组织中的细胞信号传导,相关成果近日发表于《发育细胞》杂志。
在此过程中,研究人员辨认出黑色素瘤细胞在胶原质中的整体表现和玻璃片下的整体
表现相同,可以构成更多被称作“疱疹”的圆形突起。
研究人员可以测量这些疱疹的大小
和形状,并利用定量显微镜观测目标的数量,并排序特定蛋白的原产。
这些图像可以协助
研究人员介绍癌症细胞如何侵略其他非政府。
二维三维的观察流程概念

二维三维的观察流程概念
二维和三维观察流程是指人们对于平面(二维)或空间(三维)中事物、现象等进行观察和认识的整个过程。
二维观察流程包括以下几个步骤:
1. 注意力聚焦:确定观察的对象或现象,将注意力集中在相关区域。
2. 观察细节:仔细观察对象的形状、大小、颜色、纹理等细节,理解二维空间中的关系。
3. 空间感知:利用平面图、图像或纸张等表达方式,建立对二维空间的感知和理解。
4. 分析判断:根据观察到的细节和空间关系,进行分析和判断,获取对对象或现象的认识。
三维观察流程包括以下几个步骤:
1. 注视点选择:确定观察的视角和视点,选择最能表达对象或场景的角度。
2. 空间感知:利用双眼或其他感知器官对物体或场景进行观察,感知空间深度和立体关系。
3. 视角切换:通过改变观察角度和视点,从不同角度观察物体或场景,获得更多的信息和视角。
4. 空间结构理解:根据观察到的三维形状、大小、位置和立体关系,理解物体或场景的结构和空间组织方式。
5. 分析判断:根据观察到的细节和空间关系,进行分析和判断,获取对物体或
场景的认识。
总体来说,二维观察流程强调对平面空间中事物的观察和理解,侧重于对形状和平面关系的观察;而三维观察流程强调对空间中事物的观察和理解,侧重于对形状、空间深度和立体关系的观察。
CAD从入门到精通-第12章--三维观察解析

c. 该项自动生成透视图; E. 点: a. 可依次指定相机和目标点的位置; b. 必须在一个非透视图中指定这些点; F. 平移:依次指定两点,AutoCAD将根据这两点平移
当前视图。 G. 缩放: a. 可调整相机的焦距; b. 增加镜头长度可放大对象; H. 扭曲:类似于转动相机看到的视图变化;
1) 调整距离:上下移动光标来调整相机与目标点间 的距离;
2) 旋转相机:移动光标,模拟三脚架上旋转相机效 果;
3) 连续观察:运动的速度由拖动光标的速度决定; 4) 窗口缩放:对指定区域进行缩放; 5) 范围缩放:在视口中以最大范围显示图形; 6) 调整剪裁平面: a. 将当前绘图区中的对象绕水平轴旋转90度显示; b. 在调整剪裁平面窗口中右击,将出现以下项: I. 调整前剪裁平面:可用鼠标移动前剪裁平面的位置 II. 调整后剪裁平面:可用鼠标移动后剪裁平面的位置 III. 创建剖切面:同时调整前后剪裁平面的位置; IV. 启用前后向剪裁:打开、关闭前后剪裁平面。
轴平行的轴线滚动;
4) 垂直椭圆光标: I. 光标位于上下两侧两个小圆圈内显示;
II. 如果拖动光标,则视图围绕通过象限仪中心且与X 轴平行的轴线滚动。
3. 其它操作: a. 在三维动态观察器状态下右击; b. 三维动态观察器工具栏; A. 平移视图:三维平移。 B. 缩放视图:三维实时缩放,上下移动进行。 C. 其它操作:
D. 设置投影模式:有平行和透视两种模式; E. 设置着色模式:类似于着色工具栏; F. 形象化辅助工具: a. 坐标球:在象限仪中显示或隐藏坐标球; b. 显示或隐藏栅格:栅格位于当前UCS的XY平面上; c. UCS图标:显示或隐藏UCS图标。 G. 预置视图:有10个; H. 保存视图:当在视图\命名视图中已新建了几个视
科学实验室用三维立体观察仪说明书
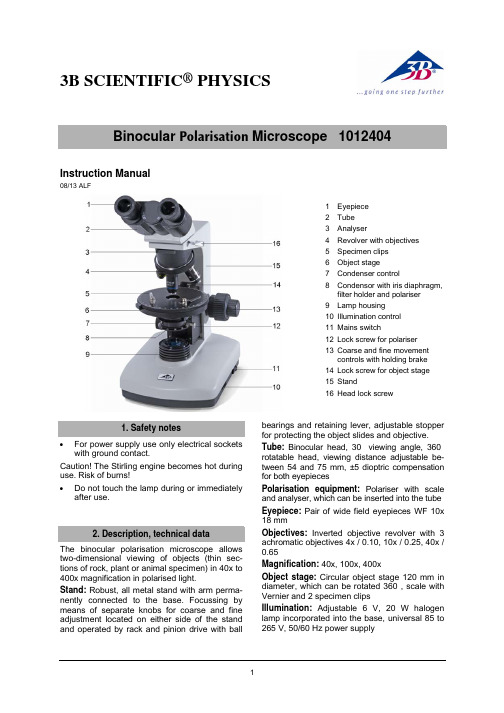
3B SCIENTIFIC ®PHYSICS1Binocular Polarisation Microscope 1012404Instruction Manual08/13 ALF1 Eyepiece2 Tube3 Analyser4 Revolver with objectives5 Specimen clips6 Object stage7 Condenser control8 Condensor with iris diaphragm,filter holder and polariser 9 Lamp housing 10 Illumination control 11 Mains switch12 Lock screw for polariser 13 Coarse and fine movementcontrols with holding brake 14 Lock screw for object stage 15 Stand16 Head lock screw1. Safety notes•For power supply use only electrical sockets with ground contact.Caution! The Stirling engine becomes hot during use. Risk of burns!• Do not touch the lamp during or immediatelyafter use.2. Description, technical dataThe binocular polarisation microscope allows two-dimensional viewing of objects (thin sec-tions of rock, plant or animal specimen) in 40x to 400x magnification in polarised light.Stand: Robust, all metal stand with arm perma-nently connected to the base. Focussing by means of separate knobs for coarse and fine adjustment located on either side of the stand and operated by rack and pinion drive with ballbearings and retaining lever, adjustable stopper for protecting the object slides and objective.Tube: Binocular head, 30° viewing angle, 360° rotatable head, viewing distance adjustable be-tween 54 and 75 mm, ±5 dioptric compensation for both eyepiecesPolarisation equipment: Polariser with scale and analyser, which can be inserted into the tube Eyepiece: Pair of wide field eyepieces WF 10x 18 mmObjectives: Inverted objective revolver with 3 achromatic objectives 4x / 0.10, 10x / 0.25, 40x / 0.65Magnification: 40x, 100x, 400xObject stage: Circular object stage 120 mm in diameter, which can be rotated 360°, scale with Vernier and 2 specimen clipsIllumination: Adjustable 6 V, 20 W halogen lamp incorporated into the base, universal 85 to 265 V, 50/60 Hz power supplyCondenser: Abbe condenser N.A.1.25 NA 0.65 with iris diaphragm , filter holder and blue filter, focussed via rack and pinion drive Dimensions: 240 x 190 x 425 mm³ approx. Weight: 6 kg approx.3. Unpacking and assemblyThe microscope is packed in a molded styro-foam container.•Take the container out of the carton remove the tape and carefully lift the top half off thecontainer. Be careful not to let the optical items (objectives and eyepieces) drop down. •To avoid condensation on the optical com-ponents, leave the microscope in the originalpacking to allow it to adjust to room tem-perature.•Using both hands (one around the pillar and one around the base), lift the microscope from the container and put it on a stable desk. •The objectives will be found within individual protective vials. Install the objectives into themicroscope nosepiece from the lowest magnification to the highest, in a clockwisedirection from the rear.•Put the head onto the top of the stand and tighten the head-lock-screw. Insert the eye-pieces into the tube.•Insert the analyser into the slot on the re-volving nosepiece.•Insert the condensor with polariser and tigh-ten the lock-screw.4. Operation4.1 General information•Set the microscope on a level table.•Place the object to be observed in the centre of the specimen stage. Use the clips to fas-ten it into place.•Connect the mains cable to the net and turn on the switch to get the object illuminated. •Make certain that the specimen is centered over the opening in the stage.•Adjust the interpupillary distance so that one circle of light can be seen.•Make the necessary eyepiece dioptre ad-justments to suit your eyes.•To obtain a high contrast, adjust the back-ground illumination by means of the iris dia-phragm and the variable illumination control. •Rotate the nosepiece until the objective with the lowest magnification is pointed at thespecimen. There is a definite “click” wheneach objective is lined up properly.NOTE: It is best to begin with the lowest power objective. This is important to reveal general structural details with the largest field of view first. Than you may increase the magnification as needed to reveal small details.To determine the magnification at which you are viewing a specimen, multiply the power of the eyepiece by the power of the objective.•Adjust the holding brake to give a suitable degree of tightness in the focusing mecha-nism.•Adjust the coarse-focusing-knob which moves the stage up until the specimen is fo-cused. Be careful that the objective does notmake contact with the slide at any time. Thismay cause damage to the objective and/orcrack your slide.•Adjust the fine-focusing-knob to get the im-age more sharp and more clear.•Colour filters may be inserted into the filter holder for definition of specimen parts.Swing the filter holder out and insert colourfilters.•Always turn off the light immediately after use.•Be careful not to spill any liquids on the mi-croscope.•Do not mishandle or impose unnecessary force on the microscope.•Do not wipe the optics with your hands.•Do not attempt to service the microscope yourself.4.2 Using the polarisation equipment•Insert the analyser into the slot on the re-volving nosepiece.•Rotate the polariser until the planes of the polariser and the analyser are exactly crossed,so that one sees a black background.Any object with a doubly-refracting (birefringent) structure should now appear brightly illuminated against the dark background. If that does not occur, it is possible that the direction of light vibration of the object coincides with the polari-sation direction. Whether or not that is the case can be tested by rotating the polariser or the specimen itself.A birefringent object, when rotated continuously, shows up brightly after each 90° rotation and is dark between these positions. In contrast, ob-jects that are isotropic and not birefringent re-main dark in all positions.23B Scientific GmbH • Rudorffweg 8 • 21031 Hamburg • Germany • Subject to technical amendments © Copyright 2013 3B Scientific GmbH4.3 Changing the lamp and fuse 4.3.1 Changing the lamp• Turn off the power switch, unplug the mainsplug and let the lamp cool down to avoid be-ing burnt.• For safety reasons, remove the eyepiece. • To change the lamp lay the microscope onits back to reach the lid on the bottom side. • Loosen screw C of the lamp socket andpush it outwards so that it is in the position shown in Fig.1.• Loosen screw A and open the cover.• To remove the halogen lamp, use a cloth orsimilar material. Do not touch the bulb with the bare hand.• Lift out the halogen lamp and replace it witha new one.• Close the cover and secure it with thescrew.• Push the lamp socket back into the originalposition and tighten screw C.CAFig. 1 Lamp socket cover: A - knurled screw, B - ven-tilation slots, C - securing screws of lamp-holder4.3.2 Changing the fuse• Turn off the power switch and unplug themains plug.• Unscrew the fuse holder on the back of thestand base with a screwdriver.• Replace the fuse and reinsert the holder inits socket.5. Storage, cleaning and disposal• Keep the microscope in a clean, dry and dust free place.• When not in use always cover the micro-scope with the dust cover.•Do not expose it to temperatures below 0°C and above 40°C and a max. relative humid-ity of over 85%.• Always unplug the mains plug before clean-ing or maintenance.• Do not clean the unit with volatile solvents or abrasive cleaners.• Do not disassemble objective or eyepieces to attempt to clean them.• Use a soft linen cloth and some ethanol to clean the microscope.• Use a soft lens tissue to clean the optics.• The packaging should be disposed of at local recycling points. •Should you need to dispose of the equip-ment itself, never throw it away in normal do-mestic waste. Local regulations for the dis-posal of electrical equipment will apply.。
7.6三维观察流程

设备坐标系中就可以显示出来。
7.6.1用户坐标系到观察坐标系的变换
如前所述,要使三维形体投影到观察平面上,首先必须将三维形体从用户坐标 系转换到观察坐标系中。该变换过程类似于6.4.2节中所述的二维情况下的坐标系 间的变换,同样需要建立三维几何复合变换(令其复合变换矩阵为Tv,使观察坐标 系与用户坐标系重合)。
具体的变换步骤如下: (1)平移观察参考点到用户坐标系原点。相应的变换矩阵如下:
7.6.1用户坐标系到观察坐标系的变换
(2)进行旋转变换分别让xv,yv,zv轴对应到用户坐标系中的x,y,z轴。当N不与任 用户坐标轴方向相同时,该变换过程类似于7.2.2节中所述的任意方向矢量(这里是矢量 N)旋转到z轴上的旋转变换步骤:先绕用户坐标系的x轴旋转,使zv轴旋转到xOz平面上; 再绕用户坐标系的y轴旋转,使zv轴与z轴重合;特殊之处是,这里最后还需要绕用户坐 标系的z轴旋转,使xv,yv轴与x,y轴重合。如果观察坐标系是左手系,还需要进行反 射变换。如果N与用户坐标轴方向相同,情况可以得到简化。
7.6.2 平行投影的规范化投影变换
7.6.2 平行投影的规范化投影变换
7.6.2 平行投影的规范化行投影的规范化投影变换
于是规划化投影变换中的错切变换矩阵为
需要注意的是,对于正投影,由于xcw=ycw=0,则变为单位矩阵。经 过这一步变换后,正投影和斜投影的观察空间都已经变换为正交平行管 道。
7.6.1用户坐标系到观察坐标系的变换
y
y
y
N
O
x
z
(a)用户坐标系与观察坐标系
O z
x z
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N
uvn观察坐标系
N V n n (n x , n y , n z ), u (u x , u y , u z ), v n u (v x , v y , v z ) |N| |V |
单位向量n、v、u形成了一个右手观察坐标系的轴向量。
6
7.2 三维观察坐标系
13
7.3 投影变换
7.3.2 透视投影 1.透视投影观察体
裁剪窗口 投影中心
汇聚点在投影中心的无限矩形棱锥观察体
远裁剪平面 矩形棱台观察体 近裁剪平面
裁减窗口 投影参考点
观察平面在近裁减平面之前的棱台透视投影观察体
14
7.3 投影变换
2.透视投影变换 右图为一个观察平面位于距观察坐标 系原点距离为zvp,投影参考点位于 C(xc,yc,zc)处的一般透视投影过程。 P(x,y,z)为空间任意点,在观察 平面上的投影点为P´(x´,y´,zvp)。透 视投影线的参数方程如下:
1 0 T 0 0 0 1 0 0 0 0 1 0 x0 u x v y0 , R x n x z0 1 0 uy vy ny 0 uz vz nz 0 0 0 0 1
M wc vc
u x v R T x n x 0
第七章 三维观察
三维观察与观察流程 三维观察坐标系 投影变换 三维裁剪算法
1
7.1 三维观察与观察流程
三维观察过程与使用照相 机拍摄照片相类似。
观察平面
对象 照相 自然景 物
定位
场景范围
成像 胶片
设置相机位 改变相机焦 置、拍摄方 距大小 向、相机的 正向上方向 设置三维观 选定观察体 察坐标系 大小
三维 观察
三维虚 拟场景
观察平 面
2
7.1 三维观察与观察流程
利用计算机进行三维观察处理流程中所经过的一般过 程如下:
从 应 程 序 3DMC 到 对 的 世 坐标 用 得 象 3DWC 界 变换到 观察坐 3DVC 标系 对观察 空间的 用 户 窗 3DVC 口进行 裁剪
3DNDC 变换到设备 坐标空间 DC 在图形设备 上输出图形
tg(θ/2)=(高度/2)/( zc-zvp) 高度=2( zc-zvp)·tg(θ/2)
宽度=横纵比×高度
18
7.3 投影变换
4.透视投影的规范化变换 在对称的透视投影观察体中透视投影变换会将棱台内部 的坐标位置映射到矩形平行管道的正交投影坐标。
ynorm (1,1,1) znorm 裁剪窗口 (xwmax,ywmax,zfar)
2 xw xw min max 0 0 0
0 2 ywmax ywmin 0 0
0 0 2 z near z far 0
xwmax xwmin xwmax xwmin ywmax ywmin ywmax ywmin z near z far z near z far 1
uy vy ny 0
uz vz nz 0
x0 u x y 0 u y z 0 u z x0 v x y 0 v y z 0 v z x0 n x y 0 n y z 0 n z 1
7
7.3 投影变换
投影变换是一种人们观察自然景物并以某种方式将其观察 结果映射到平面介质的观察方式 ,投影分为两大类:平 行投影(parallel projection)和透视投影(perspective projection)。
(xwmin,ywmin,zvp) (a)棱台中心线位于裁剪窗口中心
zc-zvp (b)视场角与裁剪窗口高度关系
对称透视投影观察体完全可由视场角、裁剪窗口的横纵比及从投影参考点到 近和远裁剪平面的距离来确定。裁剪窗口的左下角和右上角的坐标位置与棱 台中心点及窗口的高、宽之间存在如下关系: xwmin=xc-宽度/2,xwmax=xc+宽度/2,ywmin=yc-高度/2,ywmax=yc+高度/2
xnorm y
(-1,-1,-1) (xwmin,ywmin,znear) z x 投影参考点 19 规范化观察体
7.3 投影变换
透视投影变换的规范化变换矩阵:
s x 0 0 0 xw min xw max znear 0 0 0 0 0 2 s y 0 0 yw min yw max 0 znear 0 2 0 1 0 0 0 sz tz 0 0 1 0 0 1 0 xw min xw max 0 sx 0 2 yw min yw max znear s y s y 0 2 0 sz tz 0 1 0 M normpers
z x O P`(x`,y`,zvp) y C(xc,yc,zc)
观察平面 P(x,y,z)
x´=x-(x-xc)· t,y´=y-(y-yc)· t,z´=z-(z-zc)·t 0≤t≤1 在观察平面上已知z´=zvp,从而可求出观察平面与投影线之间交 点位置的参数t:t=(zvp-z)/(zc-z)
15
x´=[x· (zc- zvp)+xc· (zvp -z)]/(zc-z),y´=[y· (zc- zvp)+yc· (zvp-z)]/(zc-z)
7.3 投影变换
一些特殊和简化的透视投影过程,如: (1)将投影参考点限定在观察坐标系的z轴上,则xc=yc=0,可得到 如下变换公式:x´=x· (zc- zvp)/(zc-z),y´=y· (zc- zvp)/(zc-z) (2)将投影参考点限定在观察坐标系的原点上,则xc=yc=zc=0,可 得到如下变换公式:x´=x· zvp/z,y´=y· zvp/z (3)若观察平面是xoy平面且对投影参考点的位置不加限制,则 zvp=0,可得到如下变换公式: x´=(x· zc-xc· z)/(zc-z),y´=(y· zc-yc· z)/(zc-z) (4)若把xoy平面作为观察平面且投影参考点设定在观察坐标系的z 轴上,则xc=yc= zvp=0,可得到如下变换公式: x´=x· zc/(zc-z),y´=y· zc/(zc-z)
znear s x 0 0 0
由于齐次矩阵表示如下:
xh y h M normpers zh h
7.3.1 平行投影 平行投影可根据投影方向与投影面的夹角分为两类:正投影 (orthogonal projection,或正交投影,orthographic projection),和斜投影(oblique parallel projection) 。 7.3.1.1 正投影 正投影根据投影平面与坐标轴的夹角不同分为:三视图和正 轴侧图 。 y z y
7.2.2 世界坐标系向三维观察坐标系的变换 将图形对象的描述转换到观察坐标系的变换等价于将观察 坐标系与世界坐标系重合的变换。设观察坐标系的原点为 P0(x0,y0,z0),定义观察坐标系的单位轴向量为u(ux,uy, uz)、v(vx,vy,vz)、n(nx,ny,nz)。则平移和旋 转矩阵分别如下:
y
10
7.3.1.2 正投影变换 在正投影方式中通常采用投影方向 与z轴平行的方式,其变换公式如下: x´=x,y´=y z坐标值被保存起来,用于图形消隐算 法的可见性检测等。
7.3 投影变换
观察平面
y (x,y,z) (x´,y´) x
z
7.3.1.3裁剪窗口及正投影观察体的建立 裁剪窗口被定义在观察平面上,通常 观察平面是一个二维直角坐标系,原 点位于左下角处,并通过设置二维坐 标左下角(xwmin,ywmin)和右上角 (xwmax ,ywmax)顶点的位置来建 立裁剪窗口,且裁剪窗口的边与观察 坐标系的x、y轴平行。
投影变 换到3D 规范化 的视区
3
7.2 三维观察坐标系
7.2.1三维观察坐标系定义 观察坐标系的原点(称为观察参考点、观察位置或视点等)
定义观察坐标系过程:
yview yw
xview zview
1.在世界坐标系中指定观察坐标系的原点 2.将与观察平面垂直的观察方向定义为观 察坐标系的 zview 轴 3.定义一个与观察平面法向量垂直的向量 作为观察向上向量V,即 yview
zw
P0(x0,y0,z0)
xw
轴的正方向。
在世界坐标系中定义观察坐标系
4.计算出 xview 轴正方向向量,形成一个右手观察坐标系
4
7.2 三维观察坐标系
定义观察平面 yview xview 通常在观察坐标系中定义一个平面用 yw 来作为裁剪窗口所在平面,即观察平 zview N 面(或投影平面)。它与 zview垂直,用一 P0 个标量设定观察平面在沿zview 轴方向 xw 的位置z vp ,为从观察原点沿观察方向 zw 观察平面及其法向量的定义 到观察平面的距离,常被设置在负 zview 方向。观察平面的方向用平面法向量N来定义,并与 zview正轴
12
7.3 投影变换
ynorm
利用从窗口到 规范化正方形 的变换方法, 计算正投影观 察体的规范化 变换矩阵为:
(1,1,1)
(xwmax,ywmax,zfar)
znorm
yview (-1,-1,-1)
xnorm
(xwmin,ywmin,znear) zview xview
在规范化变换 之后,即可进 行图形的裁剪, 并结合消隐、 M ortho norm 表面绘制和视 区变换来生成 最后的屏幕显 示场景。
投影平面 B´ ´ B ´ 投影平面 B ´ B´ ´ 投影中心 A´ A A´ (a)平行投影 A (b)透视投影 投影线
投影线
投影中心(投影参考点)、投影线、投影过程 平行投影的特点是保持了对象的有关比例关系不变;而透视 投影会产生同样大小的物体近大远小的视觉效果,真实感更 强。