电动助力转向结构与控制参数的集成优化
电动助力转向系统参数研究及优化设计
控制参数和转 向性能指标之间 的关系 曲线 . 以转 向路感 和转 向灵 敏度有效频域 能量均 值为优 化 目标 , 转 向稳定 性为约束条件 , 建立 了 E P S系统多 目标优 化设计模 型 , 并利 用 MA T L A B遗传算法 ( G e n e t i c A l g o r i t h m, G A ) 工具
稳定 性为约束 条件 , 以转 向路感 、 转 向灵 敏度 有效 频 域 能量 均 值 为 目标 函数 的 优 化 设 计 模 型 , 并 利 用 MA T L A B遗传算 法 ( G e n e t i c A l g o r i t h m, G A ) 工具 箱 对 E P S系统 的参数进 行 了优 化设 计 . 最后 , 对 优 化前 后 的结果进行 了对 比分析 , 验证 了优化设 计 的有效 性 .
基金项 目: 福建省 自然科学基金资助项 目( 2 O l i J O 1 2 9 8 ) 作 者 简 介 :王 伟 ( 1 9 7 0一) , 男, 教授 . E - ma i l : mk wa n g @f z u . e d u . c n
第 1期
王
伟, 等: 电动助力转 向系统参数研究及优化设计
Par a me t r i c s t ud y and o pt i ma l de s i g n o n
e l e c t r i c po we r s t e e r i ng s ys t e ms
1 N G We i .Y 0
( Co l l e g e o f Me c h a n i c a l En g i n e e r i n g a n d Au t o ma t i o n, F u z ho u Un i v e r s i t y, Fu z h o u 35 0 0 0 8, Ch i n a )
基于RH850P1x的电动助力转向系统设计
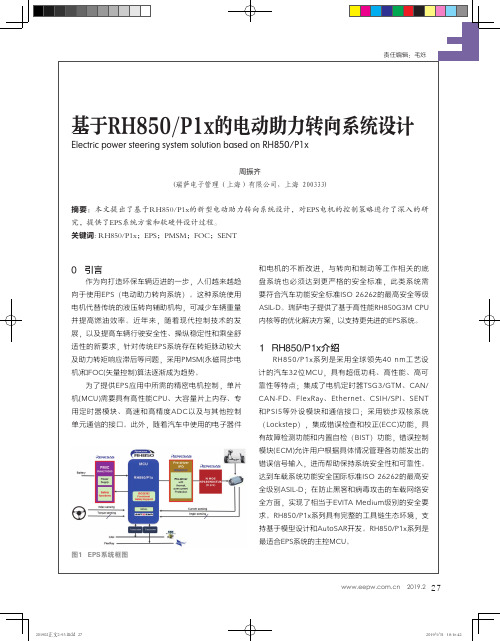
图1 EPS系统框图
2 系统设计
EPS系统如图1所示,包含以下。
A、电源管理部分:提供EPS系统所需要的各种电压,并能实现自我诊断和保护,提供对MCU的外部看门狗监控、SPI通信等;
B、传感器部分:采集电机的位置和电流等信号,电池电压等;
C、通信部分:包括CAN、SENT、SPI等,获取方向盘扭矩、车速等信息;
D、MCU控制部分:根据扭矩信号和车辆的状态,控制EPS助力策略;的PWM输出信号;
D、ENCA编码器:ENCA
信号,获得电机的位置;
E、TPBA定时器模式缓冲器
器的激励信号。
关于电机位置/转速信号的获取
多种方式:如果使用旋变编码器来检测电机位置以使用TPBA产生旋变编码器的激励信号
样返回的Sin和Cos信号,
信息;如果使用增量式编码器时
图2 EPS电机控制框图
图3 EPS软件控制框图
ELECTRONIC ENGINEERING & PRODUCT WORLD2019.2
严刚(1984-),男,嵌入式研发工程师,主要研究方向:智能家用电器基础技术研究及产品应用。
51
2019.2。
轮式挖掘机电控全液压转向系统设计及应用李耀

轮式挖掘机电控全液压转向系统设计及应用李耀发布时间:2021-07-23T15:37:13.800Z 来源:《建筑模拟》2021年第4期作者:李耀[导读] :针对轮式挖掘机的全液压转向系统在高速行驶时存在方向盘发飘问题,优化设计了电控全液压转向系统,增大车辆高速行驶时方向盘转向操纵力矩,提高了车辆高速行驶稳定性,为高机动轮式工程车辆的电控转向系统设计及应用提供了依据。
徐州徐工挖掘机械有限公司摘要:针对轮式挖掘机的全液压转向系统在高速行驶时存在方向盘发飘问题,优化设计了电控全液压转向系统,增大车辆高速行驶时方向盘转向操纵力矩,提高了车辆高速行驶稳定性,为高机动轮式工程车辆的电控转向系统设计及应用提供了依据。
关键词:轮式挖掘机转向系统电控全液压轮式挖掘机(以下简称轮挖)是以轮胎作为行走部件的挖掘机械,以其机动、灵活、高效等鲜明特点,在社区建设、市政工程等方面应用广泛[1]。
国产轮挖的行驶速度多为20-35 km/h,我司生产的轮挖行驶速度可达60 km/h以上,能够适应高速越野工况,在处置抗险救灾等紧急情况时更加高效灵活。
转向系统是影响轮式机械行驶安全的关键系统之一。
轮式工程机械普遍采用全液压转向系统[2],这种转向系统是在转向盘和转向传动机构之间、利用全液压转向器直接控制转向油缸实现转向,具有布置方便、操作轻便、反应快捷、转向灵活等优点[3]。
但该系统在应用中也可能产生转向轮跑偏、转向轮晃动严重、前轮摆头等问题[4],尤其应用在轮挖上时,在高速行驶状态下易出现方向盘发飘现象,影响车辆高速行驶的稳定性和驾驶员操作手感。
针对上述技术技术问题,本文优化设计了电控全液压转向系统,增大了车辆高速行驶时方向盘正常转向操纵力矩,解决了样机方向盘发飘问题。
1 样机主要参数底盘系统模型,其主要技术参数如表1所示。
2.1 总体方案电控全液压转向系统总体方案如图1所示。
转向管柱下端和角传动器相连实现换向,角传动器与全液压转向器之间设计有电控单元,电控单元与角传动器、全液压转向器之间通过联轴器相连。
电动机械式液压助力转向系统 (EPS)
电动机械式液压助力转向系统 (EPS)电动机械式助力转向系统 (EPS) 与传统液压助力转向机构在转向助力上有所区别。
EPS 通过一个电动伺服马达而非通过一个液压驱动装置对驾驶员提供支持。
只在转向时,此伺服马达才激活。
因此,该伺服马达在直线行驶时不消耗功率。
电动机械式助力转向系统具有下列优点:- 驻车时转向力较低- 集成式、视车速而定的转向助力(伺服转向助力系统)- 转向时冲击较低以及方向盘旋转振动较低- 主动式方向盘复位- 节约燃油达 0.3 l/100 km 并因此降低 CO 2 排放- 不需要液压油电动机械式助力转向系统包含下列装备系列:电动机械式助力转向系统 (EPS):12 伏特供电(和以前相同)电动机械式助力转向系统 (EPS),配备一体化主动转向控制 (AL) 和电动马达/变速箱特定组合:由发动机室内的外部起动接线柱进行 12 伏供电电动机械式助力转向系统 (EPS),配备一体化主动转向控制 (AL) 和电动马达/变速箱特定组合(重量集中在前桥):由辅助电池、断路继电器和具有 DC/DC 转换器的辅助电池充电装置进行 24 伏特供电显示的为带主动转向控制的电动机械式助力转向系统索引说明索引说明1转向器2转向阻力矩传感器EPS 控制单元4集成有马达位置传感器的伺服马达5EPS 单元部件简短描述将描述电动机械式助力转向系统的下列部件:EPS 单元EPS 单元由下列部件组成:- EPS 控制单元- 集成有马达位置传感器的伺服马达EPS 控制单元是电动机械式助力转向系统的一部分。
EPS 控制单元通过 2 个插头连接与车载网络连接。
转向阻力矩传感器通过另一个插头连接与 EPS 控制单元连接。
在 EPS 控制单元中存储了多条用于伺服助力装置、主动式方向盘复位以及减震特性的特性线。
根据输入端参数计算出的数值与相应的特性线一起得出必要的转向助力。
根据不同的装备系列,为 EPS 单元提供不同的总线端 Kl. 30。
《新能源汽车技术》习题解答
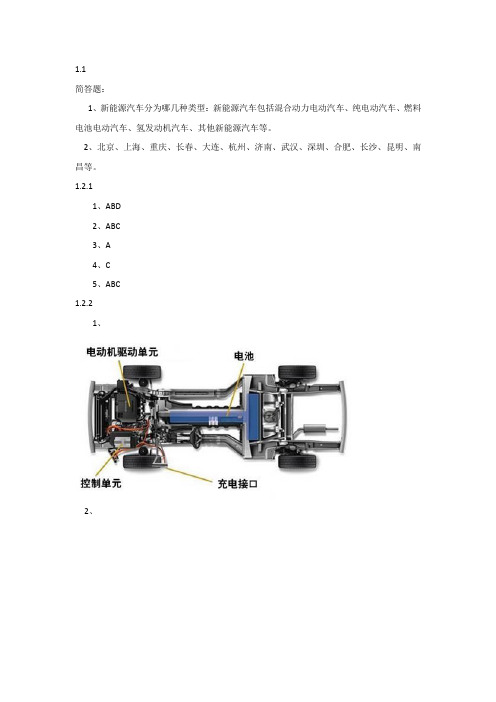
1.1简答题:1、新能源汽车分为哪几种类型:新能源汽车包括混合动力电动汽车、纯电动汽车、燃料电池电动汽车、氢发动机汽车、其他新能源汽车等。
2、北京、上海、重庆、长春、大连、杭州、济南、武汉、深圳、合肥、长沙、昆明、南昌等。
1.2.11、ABD2、ABC3、A4、C5、ABC1.2.21、2、3、混联式混合动力汽车是将并联和串联两种系统结合起来,其有两个动力源和两个及以上的动力输出端。
与并联式混合动力汽车的动力输出一致,驱动电机与传统发动机通过耦合器将动力输出给传动系统用以驱动车辆,发动机和驱动电机同样可以各自单独也可以共同驱动车辆。
但发动机一方面作为动力输出端驱动整车,同时还可以驱动发电机以产生电能储存在动力电池中,之后通过转换器传输给驱动电机。
1.31.3.11、ABCD2、ABC3、C4、BCD5、B1.3.21、额定容量是指充足电的蓄电池在规定的条件下所能输出的电量。
在我国的国家标准中,用3小时放电率(C3)来定义电动汽车蓄电池的额定容量,用20小时放电率容量(C20)来定义汽车用起动型蓄电池额定容量。
2、能量密度。
能量密度是指蓄电池单位体积所能输出的电能,单位为W﹒h/L 或kW﹒h/L。
蓄电池能量密度越高,蓄电池所占的空间越小。
3、循环寿命。
蓄电池的使用寿命通常用使用时间或循环寿命来表示。
蓄电池经历一次充电和放电过程称为一个循环或一个周期。
在一定的放电条件下,当蓄电池的容量下降到某规定的限值时,蓄电池所能承受的充放电循环次数称为蓄电池的循环寿命。
不同类型的蓄电池,其循环寿命不同。
对于某种类型的蓄电池,其循环寿命与充放电的电流大小、蓄电池工作温度、放电深度等均有密切关系。
1.3.31、铅酸电池、镍镉电池、镍氢电池和锂离子电池。
锂离子电池相比其他动力电池具有比能量高、循环寿命长、充电功率范围宽、倍率放电性能好、污染小等优良特性,现今被电动汽车广泛采用。
锂离子电池根据其正极材料的不同又分为钴酸锂电池、锰酸锂电池、磷酸铁锂电池以及三元锂材料电池等。
汽车C-EPS_转向管柱异响问题分析及优化方案的研究
学术|制造研究ACADEMIC汽车C-EPS 转向管柱异响问题分析及优化方案的研究(1.江苏联合职业技术学院无锡交通分院,无锡 214171; 2.上汽大通汽车有限公司无锡分公司,无锡 214177)杨香莲1、吴传全1、付豪2摘要:某车型整车下线后,在测试某一工况时,发现电动助力转向管柱在运转过程中出现异响问题。
针对此异响,通过主观评价、台架复现及客观数据采集分析,结合CAE 受力分析,找出异响发生的根本原因,并制定了有效的改进优化方案消除异响。
最后随机挑选10台下线车辆进行主观评测验证,结果表明优化后的异响得到了明显改善,噪声值在可接受范围内,提升了驾驶舒适性。
关键词:C-EPS ;转向管柱;异响;台架;受力分析中图分类号:U463.4 文献标识码:A0 引言随着国民生活质量的提高,人们对汽车舒适性的追求及整车振动噪声控制的要求越来越高[1]。
汽车使用过程中产生的异响,已经成为越来越多用户抱怨的焦点。
因而对于异响的消除需要更加严格的控制。
管柱式电动助力转向系统(C-EPS)相对于液压助力转向系统(HPS),可以节油3%~5%,其节能性、电动化和低噪声的优势明显,综合操控性能更加优异[2]。
但是,电动助力转向系统内部集成的零部件数量较多,结构相对比较复杂。
尤其是管柱类的助力转向器,其工作机构位于驾驶室内,距离驾驶员较近[3],在发生异响时更容易被驾驶员发觉,且异响发生时常常伴有方向盘上的手感振动冲击。
转向异响多为瞬态噪声,按照其产生类型分为3类:第一类为“嗡嗡”声(Buzz),主要是由于部件的共振引起的噪声;第二类为“吱吱”声(Squeak),主要由于连接部位摩擦接触或滑移产生的噪声;第三类为“咔哒”声(Rattle),主要是连接部位之间的冲击接触而产生的噪声。
其他类型的异响还包括电磁噪声、轴承噪声等。
对转向系统噪声进行有效控制,可以提升驾乘的舒适性,因此对转向系统异响的研究很有必要。
1 转向管柱异响问题概述1.1 问题描述转向管柱是转向轴、转向助力辅助装置、方向盘调节锁止机构和方向盘锁止机构的承载体[4],同时担负着车辆碰撞时对驾驶员保护和能量吸收的作用。
商用车电控转向系统的发展现状与趋势
商用车电控转向系统的发展现状与趋势目录一、内容综述 (2)1.1 背景介绍 (3)1.2 研究意义 (4)二、商用车电控转向系统发展现状 (6)2.1 国内外技术对比 (7)2.2 关键技术发展 (8)2.2.1 传感器技术 (10)2.2.2 控制算法 (11)2.2.3 电源系统 (12)2.3 市场应用情况 (13)2.4 存在的问题与挑战 (14)三、商用车电控转向系统发展趋势 (16)3.1 技术创新方向 (17)3.1.1 高性能传感器技术 (18)3.1.2 智能化控制算法 (20)3.1.3 绿色能源与环保技术 (21)3.2 市场需求变化 (22)3.3 政策法规影响 (24)四、未来展望 (25)4.1 技术突破的重点领域 (26)4.2 市场竞争的焦点 (27)4.3 行业发展的潜在机遇与威胁 (28)五、结论 (29)5.1 研究成果总结 (30)5.2 对产业的建议与展望 (32)一、内容综述商用车电控转向系统作为现代商用车关键技术之一,其发展现状与趋势直接影响着整个商用车行业的进步。
随着科技的不断革新,电控转向系统在商用车领域的应用逐渐普及,其性能与智能化程度不断提高,为提升车辆的操控性、安全性及节能减排提供了有力支持。
技术成熟度的提升:随着相关技术的不断研发与实践,商用车电控转向系统的技术成熟度日益提高,系统稳定性、可靠性得到显著增强。
智能化和电动化趋势:随着自动驾驶技术的兴起,商用车电控转向系统正朝着智能化、电动化方向发展,具备更加精准的转向控制、自适应调节等功能。
市场需求增长:随着物流、运输等行业的发展,商用车市场需求持续增长,对高性能、智能化的电控转向系统需求亦随之增长。
更高的集成度:随着技术的进步,商用车电控转向系统将更多地集成其他功能,如自动驾驶辅助、车辆稳定控制等,实现更高程度的系统集成。
智能化和自动化:智能化将成为未来商用车电控转向系统的重要发展方向,通过先进的算法和传感器技术,实现自动调整、预测转向等功能。
汽车电动辅助转向传动机构项目实训项目认识心得
汽车电动辅助转向传动机构项目实训项目认识心得1.引言概述部分是对整篇文章的介绍和概括,可以从以下几个方面进行描述:1.1 概述汽车电动辅助转向传动机构项目实训项目是一个实践性极强的项目,旨在通过参与实际的项目实训,提升学生对于汽车电动辅助转向传动机构的认识和理解。
本文将围绕该项目的实施过程和项目经验展开,探讨项目的具体实操内容,总结经验和教训,同时对未来的发展进行展望。
项目实训是学生将理论知识应用到实际操作中的重要环节,通过参与该项目的实训,学生将有机会亲自接触和操作真实的汽车电动辅助转向传动机构。
通过实际操纵和调试,学生将深入了解该传动机构的原理、结构和工作原理,以及其在汽车行驶过程中的作用和重要性。
在项目实施的过程中,项目组成员将根据项目需求,进行机构的选型和设计,制定实施计划,并协同合作完成实操工作。
实训过程中,学生将学习到团队合作、项目管理以及技术操作等方面的知识和能力。
同时,还将通过错误和挑战来不断修正和提高自己的技能,增强解决问题的能力和创新思维。
通过对该项目的深入了解和实际操作,学生将获得宝贵的实践经验和技能,提高自身的综合素质和竞争力。
同时,该项目也为学生未来的职业发展和研究提供了宝贵的素材和基础。
综上所述,本文将从项目实施的过程入手,详细介绍汽车电动辅助转向传动机构项目实训的内容和经验,总结学到的知识和技能,展望未来的发展方向。
通过本文的撰写,旨在分享实践经验,促进项目实训的有效实施,从而为学生的职业发展和学术研究提供有益的借鉴和参考。
1.2文章结构文章结构部分的内容:文章的结构分为引言、正文和结论三个部分。
下面将逐一介绍这三个部分的内容。
引言部分主要包括概述、文章结构和目的三个内容。
首先概述部分将简要介绍汽车电动辅助转向传动机构项目实训项目的背景和意义,说明为什么这个项目是值得研究和实施的。
这可以让读者对该项目有个整体的认识和了解。
其次,文章结构部分将介绍整篇文章的结构,说明各个部分的内容和组织方式。
新能源汽车电气技术(第2版)课件:新能源汽车电动助力转向系统
四、EPS系统的优缺点
1.EPS系统具有以下优点: 与其他转向系统相比,该系统突出的优点表现在: 1)更加节省能源和环保。因为EPS没有液压器件,所以可算得上是标准 的“按需供能型”系统,即在转向的情况下系统才工作,而汽车停止时或者 直线运行时完全不消耗任何能量,这样一来耗能就会相对较少。因此与液压 动力系统进行比较,可以节约能源80%到90%。而在不转向时,EPS燃油消耗 会降低2.5%;在使用转向系统时,则会减少5.5%。另外又因为在-40℃的低 温的状况下,EPS也可以较好地工作,而传统的液压系统只有液压油预热后 才可以工作,由于EPS没有起动时的预热过程,所以节省了许多能量。EPS也 不存在液态油的泄漏问题,从而也不会对环境造成严重的污染,符合了环保 的设计理念。 2)助力效果相对更好。EPS可根据汽车运行的不同工况,通过优化设计 助力特性曲线,获得准确的助力,助力效果十分理想。同时还可以通过控制 阻尼系数减小因为路面的干扰对转向系统产生的影响,保障车辆低速行驶时 的轻便性,提高汽车高速行驶时的稳定性,进而提高汽车的转向性能。
六、电动助力转向系统(EPS)工作原理
转向器选择齿轮齿条式,转向盘转矩通过扭矩传感器来测得。当没有转向动作时,助力 电机不工作;当驾驶员有转向操作时,扭矩传感器发出一个电压信号,电子控制单元(ECU) 根据电压信号值推算得到转向盘转矩的大小及方向,同时,车速传感器将检测到的当前车速 传递到电子控制单元(ECU),电子控制单元(ECU)先根据车速选择与之对应的助力特性曲 线,再根据转向盘转矩进行运算处理,得到目标助力转矩的大小以及方向,再经过一系列计 算确定助力电机的旋转方向和驱动电流的大小,助力电机根据得到的驱动电流提供相应的助 力转矩,减速增扭后作用到转向轴上,为转向系统提供与工况相适应的助力。
eps助力转向开发流程
eps助力转向开发流程英文回答:1. Concept and Design:Define the functional requirements for the EPS (Electric Power Steering) system, such as steering effort, response, and stability.Determine the system architecture, including the EPS motor, control unit, and sensors.Select appropriate components and materials based on performance, reliability, and cost considerations.2. Simulation and Modeling:Develop computer models to simulate the EPS system's behavior under various driving conditions.Use simulation results to optimize the control algorithms and system parameters.Conduct virtual testing to evaluate the system's performance and identify potential issues.3. Prototyping and Testing:Build prototypes of the EPS system to evaluate its physical and functional characteristics.Conduct bench tests to assess the motor's torque and efficiency.Perform road tests to evaluate the system's steering feel, stability, and safety.4. Control Algorithm Development:Design and implement control algorithms that regulate the EPS motor based on steering input, vehicle dynamics, and sensor feedback.Optimize the control algorithms to achieve desired steering behavior, such as low effort at low speeds and precise response at high speeds.Calibrate the control parameters to ensure optimal performance across a wide range of operating conditions.5. Integration and Validation:Integrate the EPS system into the vehicle's steering system, including the steering wheel, steering column, and sensors.Conduct system-level testing to ensure proper functionality and compatibility with other vehicle systems.Obtain regulatory approvals and certifications as required.6. Production and Deployment:Manufacture the EPS system components and assemble the final product.Establish quality control measures to ensure consistent performance and reliability.Implement a production process that meets time, cost, and quality targets.7. Maintenance and Support:Provide technical documentation and training materials for maintenance and repair.Establish a support network to address any issues or concerns that may arise during the system's lifetime.Monitor field performance data to identify potential areas for improvement and upgrades.中文回答:1. 概念和设计:定义 EPS(电动助力转向)系统的功能需求,例如转向力、响应性和稳定性。
C-EPS硬件在环仿真平台设计与控制策略验证

1.2转向阻力矩加载装置的确定和匹配
常见的阻力矩加载装置有螺旋弹簧、液压装置、磁粉制动器及伺服电机。螺旋弹簧结构简单紧凑,可 靠性高,但是螺旋弹簧模拟的单一线性阻力矩与实际转向阻力矩差别较大;液压装置成本较高 、结构复
杂、体积较大和维护成本较高;磁粉制动器虽能很好地模拟转向阻力矩 ,但无法模拟转向回正阻力矩,对
(School of Mechanical and Energy Engineering, Zhejiang University of Science and Technology, HangZhou, 310023 , Zhejiang, China)
Abstract: In order to facilitate the design and research of column type electric power steering(CEPS) control system, the C-EPS hardware-in-the-loop simulation platform was developed by applying MATLAB/dSPACE real-time simulation system. The steering resistance torque calculation modulewasestablished, andtheservomotorwhichcontroledbydSPACE wasused to output steering resistance torque. The C-EPS control strategy which includes assistance
0.57 0.000203
16 0.94 0.0005
EHA技术在可控悬架中的应用
EHA技术在可控悬架中的应用摘要:随着汽车产业的不断发展,人们对驾驶体验的要求也越来越高。
可控悬架技术的出现,能够有效地提高汽车的行驶性能和乘坐舒适度。
而EHA技术的应用,则进一步提升了可控悬架的性能和控制精度。
本篇论文将着重介绍EHA技术在可控悬架中的应用,包括其工作原理、特点以及优势。
通过对EHA技术在可控悬架中的应用研究,旨在为汽车制造商提供新的技术思路和方向。
关键词:可控悬架;EHA技术;行驶性能;乘坐舒适度;控制精度一、引言随着人们对汽车性能和乘坐体验的要求不断提高,越来越多的汽车制造商开始使用可控悬架技术来提高汽车的行驶性能和乘坐舒适度。
可控悬架技术通过电子控制系统对车辆悬架系统进行调节,可以根据不同路面条件和驾驶需求,实现悬架的主动调节,从而提高了汽车的稳定性和乘坐舒适度。
但是,传统的可控悬架技术由于采用了液压系统,存在繁琐的管路布置以及维护难度大等问题。
而EHA技术则可以很好地解决这些问题,因此在可控悬架领域有着广泛的应用前景。
二、EHA技术的特点与工作原理EHA技术全称为电液液压作动器技术,它是一种新兴的传动技术,与传统的液压技术相比,具有以下几个优势:(1)传动效率高;(2)响应速度快;(3)控制精度高;(4)易于集成和维护。
EHA技术的工作原理是基于电液传动原理的,其主要由电机、泵、电液阀、液缸等组成。
当电机启动后,通过泵将液体压力传递至液缸中,从而实现对可控悬架的主动调节。
三、EHA技术在可控悬架中的应用EHA技术在可控悬架领域中的应用,主要体现在以下几个方面:(1)主动悬架控制EHA技术可以通过电控系统对悬架系统进行实时的主动控制,通过调整悬架的硬度和高度等参数,可以实现更加平稳的行驶体验。
(2)防侧翻系统在车辆通过弯道行驶时,EHA技术可以将车身姿态调整至最佳状态,从而避免了车辆发生侧翻的情况。
(3)电动车载舒适性改善对于电动汽车来说,由于其结构的特殊性,对车载舒适度的要求更高。
电动汽车电动助力转向结构原理介绍

同轴式REPS在结构和受力上都类似于液压转向器,输出相同的齿条力,它们外 观尺寸可以做到很接近,所以从液压转向器过渡到同轴式REPS较为简单。
滚珠丝杠
滚珠丝杠副
滚珠螺母
螺纹部分 (支撑)轴颈 其他部分(齿条)
滚珠螺母体
滚珠循环装置
密封件 润滑剂
滚珠
负荷滚珠
预紧元件
间隔滚珠
其他
按照滚珠丝杠副的作用其可分为传动类(T型)和定位类(P型);按照循环方 式又可分为内循环式和外循环式;按照滚道截面形状又可分为梯形类,单圆弧类和双圆 弧类。参考样件的滚珠丝杠副为双圆弧外循环式传动滚珠丝杠副。
汽车控制器技术域
1、RDEPS
主要构成:壳体、 电机、滚柱丝杆副 、输入轴齿轮轴总 成、扭矩传感器、 ECU、轴承、支撑 套、等
汽车控制器技术域
2、 APAEPS
6B REPS采用的是此结构
主要构成:壳体、电机、滚柱 丝杆副、输入轴齿轮轴总成、扭矩 传感器、ECU、轴承、支撑套、皮 带传动副等。
汽车控制器技术域
二 电动助力转向系统工作原理
REPS:REPS扭矩传感器检测从转向盘传来的扭矩,传输给REPS ECU;ECU同时通过 整车CAN信号线接收车速信号,发动机转速信号。ECU根据扭矩信号,车速信号,发动 机转速信号计算电机需要的电流。电机通电流后产生旋转扭矩,通过同步带传动副及丝 杆螺母传动副驱动齿条直线运动,从而推动车轮转向。
燃料电池汽车电动液压助力转向系统设计研究

内各大高校、 科研机构和企业正在进行研究开发 , 但在 一 些 关 键 技 术 和 零 部 件 方 面 未 有 突 破 性 进
展, 目前 国 内很 少 有成 熟 技 术 的 E S产 品投 向市 P 场, 还需要 大 力 研 究 。尽 管 E S是 动 力 转 向技 术 P 未来 的发 展趋 势 , 没 有 充 分 利 用 现 有 液 压 动 力 但 转 向技 术 , 丧 失 习惯 的 液 力 感 觉 和 转 向路 感 。 会 E S系统作 为 中间产 品起 着 承前 启 后 的作 用 , HP 可
・
・
上海汽车
2 1.2 0 2 0
短 , 吸收来 自路 面的冲击 , 可 大大降低 开发成本和缩 短 开发周期 , 满足新 能源汽车 的开发要 求 。 本 文 的 主要研 究 目的是针 对 目前 燃 料 电池 汽 车开发状 况 , 介绍 如 何 充 分 利 用 成熟 H S技 术 开 P 发 应用 电动 液压助 力 转 向 系统 。针 对某 款燃 料 电 池 汽车 E P H S系统设 计 , 出不 同 的系统控 制设 计 提 方 案 , 进 行 比较 , 出一 种 较优 的设 计 方 案 , 并 得 为 燃 料 电池 汽 车转 向系统 开发设 计提 供范 例 。
样件制作及试验 l I 。
装车及调试 l
电动 泵结 构 。集 成 的 电 动泵 结 构 紧凑 , 量 变 得 质 更轻 , 安装 的柔 性也 大大增 强 。
系 验及 试验 l 统试 道路
图 4 燃料 电池汽车 E P H S系统设计流程图
图 6 电动 泵 结 构 简 图
以充分利 用现有成 熟 的液 压动力转 向和控 制技 术, 不仅能提高转向助力系统的工作性能、 降低系统
EPS转向系统鹅卵石路、绳索路异响分析
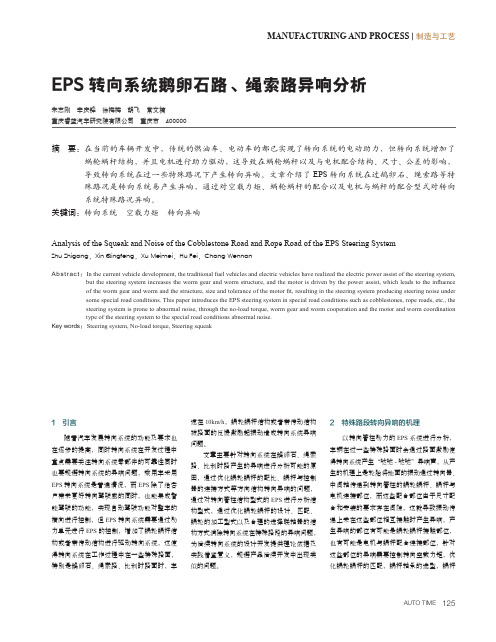
MANUFACTURING AND PROCESS | 制造与工艺1 引言随着汽车发展转向系统的功能及要求也在逐步的提高,同时转向系统在开发过程中重点需要关注转向系统零部件的可靠性同时也要规避转向系统的异响问题,乘用车采用EPS转向系统是普遍情况,而EPS除了给客户带来更好转向驾驶感的同时,也能集成智能驾驶的功能,实现自动驾驶功能对整车的横向进行控制,但EPS转向系统需要通过助力单元进行EPS的控制,增加了蜗轮蜗杆结构或者带传动结构进行驱动转向系统,这使得转向系统在工作过程中在一些特殊路面,特别是鹅卵石、绳索路、比利时路面时,车速在10km/h,蜗轮蜗杆结构或者带传动结构被路面的反馈激励起振动造成转向系统异响问题。
文章主要针对转向系统在鹅卵石、绳索路、比利时路产生的异响进行分析可能的原因,通过优化蜗轮蜗杆的配比、蜗杆与控制器的连接方式等方向结构转向异响的问题,通过对转向管柱结构型式的EPS进行分析结构型式,通过优化蜗轮蜗杆的设计、匹配、蜗轮的加工型式以及合理的选择联轴器的结构方式消除转向系统在特殊路段的异响问题,为后续转向系统的设计开发提供理论依据及实践借鉴意义,规避产品后续开发中出现类似的问题。
朱志刚 辛庆锋 徐梅梅 胡飞 常文楠重庆睿蓝汽车研究院有限公司 重庆市 400000摘 要:在当前的车辆开发中,传统的燃油车、电动车的都已实现了转向系统的电动助力,但转向系统增加了蜗轮蜗杆结构,并且电机进行助力驱动,这导致在蜗轮蜗杆以及与电机配合结构、尺寸、公差的影响,导致转向系统在过一些特殊路况下产生转向异响。
文章介绍了EPS转向系统在过鹅卵石、绳索路等特殊路况是转向系统易产生异响,通过对空载力矩、蜗轮蜗杆的配合以及电机与蜗杆的配合型式对转向系统特殊路况异响。
关键词:转向系统 空载力矩 转向异响Analysis of the Squeak and Noise of the Cobblestone Road and Rope Road of the EPS Steering SystemZhu Zhigang,Xin Qingfeng,Xu Meimei,Hu Fei,Chang WennanAbstract: I n the current vehicle development, the traditional fuel vehicles and electric vehicles have realized the electric power assist of the steering system, but the steering system increases the worm gear and worm structure, and the motor is driven by the power assist, which leads to the influence of the worm gear and worm and the structure, size and tolerance of the motor fit, resulting in the steering system producing steering noise under some special road conditions. This paper introduces the EPS steering system in special road conditions such as cobblestones, rope roads, etc., the steering system is prone to abnormal noise, through the no-load torque, worm gear and worm cooperation and the motor and worm coordination type of the steering system to the special road conditions abnormal noise.Key words: S teering system, No-load torque, Steering squeakEPS转向系统鹅卵石路、绳索路异响分析2 特殊路段转向异响的机理以转向管柱助力的EPS系统进行分析,车辆在过一些特殊路面时会通过路面激励使得转向系统产生“哒哒-哒哒”异响声,从产生的机理上是轮胎将地面的振动通过转向器、中间轴传递到转向管柱的蜗轮蜗杆、蜗杆与电机连接部位,而这些配合部位由于尺寸配合和安装的要求存在间隙,这就导致振动传递上来在这些部位相互接触时产生异响,产生异响的部位有可能是蜗轮蜗杆接触部位,也有可能是电机与蜗杆配合连接部位,针对这些部位的异响需要控制转向空载力矩,优化蜗轮蜗杆的匹配,蜗杆轴承的选型,蜗杆AUTO TIME 125MANUFACTURING AND PROCESS | 制造与工艺与电机的连接等型式都会对转向异响有贡献,如图1所示。
方向盘角脉冲输入下的汽车SAS与EPS集成控制研究_陈柏林
a2
S13
24
14
S 14
a1
m
Tm
S 24
Bp
l2
l1
v
1
Jp
Tr
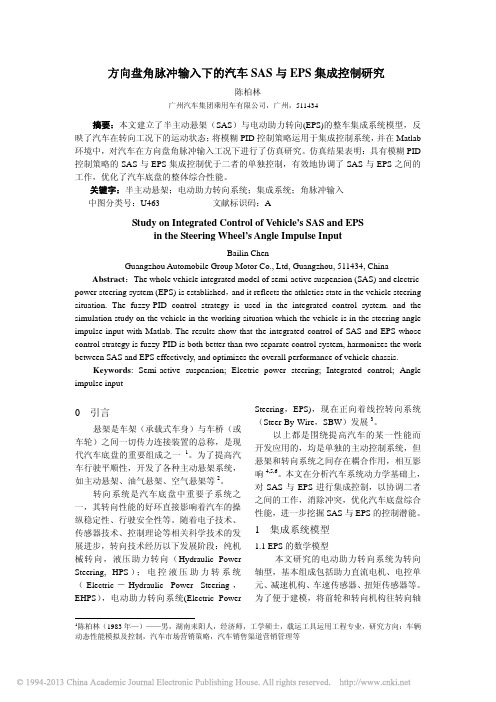
图 2 整车转向模型
其运动微分方程分别如下:
图 1 EPS 模型
电动机转角、小齿轮转角、和前轮转角 之间的关系如下:
)Mh M v( a a (S 13 S 14 S 23 S 24) 0 l1 (S13 S14 ) l2 (S23 S24 ) 0 I z
b23 b23 b24 b24 c13 c14 c23 c24
U in t [ f 1 3 , f 1 4 , f 2 3 , f 2 4 , w 1 3 ( t ), w 1 4 ( t ), w 2 3 ( t ), w 2 4 ( t ), h ( t ), T m ( t )] T
(20) (21) (22) (23)
Ka1[ (Zb13 Zb14) 2h1] 2h1 f14
Z ) Fa23 Ka23 (Za23 Zb23 ) Ca23 (Z a23 b23 Ka2 [ (Zb23 Zb24 ) 2h2 ] 2h2 f23 Z ) Fa24 Ka24 (Za24 Zb24 ) Ca24 (Z a24 b24
其运动微分方程分别为:
l (F F ) l (F F ) 0 Iy 1 a13 a14 2 a23 a24 h M v( ) h (F F ) I
x a a 1 a13 a14
(7) (8)
h2 (Fa23 Fa24 ) Ma gha 0
Z ai3 C ai3 f i3
基于CarSim的电动助力转向系统仿真与硬件在环验证

基于CarSim的电动助力转向系统仿真与硬件在环验证一、本文概述随着汽车工业的快速发展,电动助力转向系统(Electric Power Steering, EPS)已成为现代车辆的重要组成部分。
EPS系统不仅提高了驾驶的便捷性和舒适性,同时也对车辆的操纵稳定性和安全性起着至关重要的作用。
然而,EPS系统的设计和优化面临着众多挑战,包括系统性能的优化、安全性的保障以及成本的控制等。
因此,对EPS系统进行精确而高效的仿真分析以及硬件在环验证成为了研究和开发过程中的关键步骤。
本文旨在介绍基于CarSim的电动助力转向系统仿真与硬件在环验证的研究方法和技术。
本文将概述EPS系统的基本原理和结构,以及其在车辆动力学中的作用。
本文将详细介绍CarSim仿真软件在EPS 系统仿真中的应用,包括建模过程、仿真参数设置以及仿真结果的分析和处理。
接着,本文将探讨硬件在环验证的重要性,以及如何在CarSim环境中实现硬件在环验证。
本文将通过实例分析,展示基于CarSim的EPS系统仿真与硬件在环验证的实际应用效果,为EPS系统的设计和优化提供有效的技术支持。
通过本文的研究,旨在为EPS系统的研究者和工程师提供一种基于CarSim的仿真与硬件在环验证的方法论,以提高EPS系统的开发效率和性能优化,为现代汽车工业的发展做出贡献。
二、EPS系统原理及CarSim仿真建模电动助力转向系统(EPS,Electric Power Steering)是一种先进的汽车转向系统,旨在通过电机提供辅助转向力矩,以提高驾驶的舒适性和安全性。
EPS系统主要由转向传感器、车速传感器、电机、电子控制单元(ECU)等组成。
当驾驶员转动方向盘时,转向传感器检测方向盘的转角和转速,车速传感器则检测车辆的速度。
这些信息被传递给ECU,ECU根据预设的控制策略计算出所需的辅助转向力矩,并控制电机产生该力矩,从而帮助驾驶员更轻松、更稳定地驾驶汽车。
为了对EPS系统进行仿真分析,我们采用了CarSim软件。
汽车转向传动机构的类型分析与优化设计

汽车转向传动机构的类型分析与优化设计一、概述汽车转向传动机构作为汽车底盘系统的重要组成部分,负责将驾驶员的转向意图转化为车轮的实际转向动作,其性能直接影响到汽车的操控稳定性、行驶安全性以及驾驶舒适性。
随着汽车技术的不断发展和市场需求的日益多样化,对汽车转向传动机构的要求也越来越高。
对汽车转向传动机构的类型进行深入分析,并在此基础上进行优化设计,具有重要的理论意义和实际应用价值。
传统的汽车转向传动机构主要包括机械式转向系统和液压助力转向系统。
机械式转向系统结构简单、可靠性高,但转向力矩较大,驾驶员操作负担较重。
液压助力转向系统通过液压装置提供助力,减轻驾驶员的转向负担,但存在能耗高、响应速度慢等缺点。
近年来,随着电子技术的快速发展,电动助力转向系统逐渐成为主流,其通过电机提供助力,具有能耗低、响应速度快、可调整性强等优点,成为现代汽车转向传动机构的重要发展方向。
即便是电动助力转向系统,也存在一些需要解决的问题。
例如,如何进一步提高转向的精准性和稳定性,如何优化转向传动机构的布局和结构设计以降低制造成本和提高可靠性,如何适应不同车型的转向需求等。
对汽车转向传动机构进行优化设计,是提高汽车性能和市场竞争力的重要途径。
本文将对汽车转向传动机构的类型进行详细分析,包括机械式、液压助力式和电动助力式等不同类型的结构特点、工作原理及优缺点。
在此基础上,结合现代设计理论和方法,提出针对电动助力转向系统的优化设计方法,包括转向力矩的优化分配、传动比的合理选择、结构布局的优化等。
通过理论分析和实验研究,验证优化设计的有效性和可行性,为汽车转向传动机构的设计和制造提供有益的参考和借鉴。
1. 汽车转向传动机构的重要性汽车转向传动机构的重要性不容忽视。
作为汽车操控系统的核心组成部分,转向传动机构直接关系到车辆的行驶安全、驾驶体验以及整体性能。
一个优质的转向传动机构能够确保车辆在行驶过程中稳定、灵活地响应驾驶员的转向操作,从而提高行驶的安全性和舒适性。
汽车电动助力转向系统关键技术分析

汽车电动助力转向系统关键技术分析摘要:现阶段,汽车的电动助力转向系统技术,已经属于一种较为常见且成熟的应用技术,将其应用于汽车制造中,在很大程度上提升了汽车制造的质量,使得汽车制造能够更好地迎合未来汽车发展的需要。
将这一技术应用于汽车制造中,能够降低汽车在低速行驶时转弯上的阻力,从而使得整个转向操作更加轻便与灵活,同时,在汽车的高速行驶时,能够进一步加重转向重力,使得汽车的转向更加具有稳定性。
通过这种设置,能够在很大程度上避免由于转向操作失控问题而导致的汽车驾驶事故。
本文主要分析了汽车电动助力转向系统中的相关关键技术,以供参考。
关键词:汽车电动助力转向系统;控制单元;冗余设计在现代电子信息技术的高速发展推动下,当前我国汽车工业水平提升明显,现代化技术应用于现代汽车工业的生产制造中,在很大程度上提高了汽车性能,同时,也缓解了汽车转弯操作转向的问题。
电动助力转向系统在很大程度上规避了传统汽车电控系统与液压动力转向系统上存在的不足,能够进一步提升整个转向操作的安全性,突破传统转向的限制。
也因此,这种转向系统技术在汽车制造业中有着十分广泛的应用,所占据的市场比例逐渐提升,更有取代传统转向系统的趋势。
一、汽车电动助力转向系统的关键部件(一)传感器传感器是汽车电动助力系统中的关键部件之一,主要分为扭矩传感器与车速传感器两种。
其中,扭矩传感器主要负责对汽车驾驶员在传入轴上的作用力方向以及作用力的大小进行分析,其工作的主要目的在于更好地通过对驾驶员力的结构的分析,实现对汽车转向力的相应调整。
车速传感器顾名思义,是对汽车行驶速度的测量,通过对汽车行驶速度的测量,以自动化辨别转向系统应更加灵活或更加稳重。
这两种传感系统均为信号控制系统,相对而言,其工作原理较为复杂,且对精度有着极高的要求。
(二)电动机电动机的主要作用,在于为汽车电动助力转向系统提供动力,它能够将电子元件输出的控制指令转换为实际的操作提供辅助距扭,能够将控制指令转换为实际的动力元素,从而确保汽车的转向系统能够有效应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
处 建立 了整 车动 力 学模 型对 其 进 行考 察 。参 照文 献 [ ] 列 出如下 考 虑侧倾 的整 车 动力 学 方程 式 , 1可
方 程表 达式 为 :
一
~
m +( + ) k 卢+[ +( m
—
一 r r/ ] l o) v r k
m h +( v + , 一 ∥ 矿一 E = k E y s E E 廿) () 4
电动助 力转 向结 构 与控 制 参 数 的集 成 优化
沈扬 凤 曹 勇 蝴 泽胜 ( b 武汉理工大学汽车工程学院, 武汉 407 ) 300
【 摘要】 在 对汽车电 动助力转向 系统(P) Es的结构及 其动 力学特性分析的 基础上, 建立了线性3 度 自由
汽车模型与 E S系统的集成数学模 型。在此基 础上 , P 用遗传算 法对 E S系统结构参 数和控 制参数进行 集成优 P
( P )w s nl e , n - O i a m t m t a moe o e i ewt a P a e u . E S a a zd ada3D F l er a e ai l d l f vhc i nE Sw sst p a y n h c a l h
・
4 ・ 2
上海汽车
2 1. 1 0 0 1
式 中 :m D , 、 分 别 为 电 机 转 动 惯 量 和 阻 尼 系
输 入 轴
数 ; 为 电动机 助力 转 矩 ; s i 为减 速器 传 动 比。 m
2 整 车 动 力 学模 型
为 了对 E S系 统 性 能 进 行 更 全 面 的 研 究 , P 此
速( 由车速传 感 器得 到 ) 和助 力 电机 状 态 , C E U运 算得 到助力扭 矩并 向助力 电机发 出指令 。 由 电机
为扭 矩传感 器 刚 度 系 数 ; D 分别 为前 轮 绕 L、 k 主销 的转 动惯量 、 阻尼 和 刚度系数 。
收稿 日期 : 00— 7—1 21 0 2
【 主题词】 电动助力转 向 汽车 优化设计
在建 立 了线性 3自由度 汽车模 型 与 E S系统 P
产 生 的扭矩 通 过 减 速 机 构 放 大 并 提 供 给 转 向 柱 。
集成 的数 学模 型基 础上 , 用 电流 P 采 D控 制 策 略 , 推导 出系 统 评 价 标 准 的 表 达 式 。在 此 基 础 上 , 建 立 汽车系统 和 电动助力 转 向系统 的综 合 系统 多 目 标优化 设 计模 型 , 采 用 遗 传 算 法 工 具 箱 对 E S 并 P 的主要 参数进 行优 化设 计 。最 后对 所 设计 的参 数 和控制算 法 的有 效 性 进 行 了仿 真 验 证 , 到 了较 得 好 的效果 。
化 。最 后 , 过 仿 真 验 证 了所 设 计 的 参数 和控 制 算 法 的 有 效 性eaddnmcca c r tso a l t o e s en yt A s at r h t c r n ya i hr t ii f n e c cpw r t r gss m r u a e sc er i ei e
式 中 : 、 、 分别为 转 向盘 扭 矩 、 前轮 绕 主 销扭 矩 和前 轮 转 向阻 力 矩 ; ^6 、r 别 为方 向 8 、 分 盘转 角 、 出轴转 角 和 前 轮转 角 ; 分别 为 方 输 厶、
向盘和转 向 柱 的 转 动 惯 量 和 转 向柱 阻 尼 系数 ; k
Ba e i t e mo e ,t e EP e a a tr r p i z d b p l ig g n t lo t s d Ol h d l h S k y p r mee s we e o tmie y a p yn e e i ag r hm.Th e c i ed— sg e a a tr n o to ta e y we e v ld t d o h i lto e u t . i n d p r mee s a d c n r lsr tg r ai ae n t e smu a in r s ls
助 力力 矩连 同输入 轴扭 矩 克服 输 出轴 的反扭 矩 和
转 向机构 摩擦 阻力 转 动转 向柱 。其 系统 结构 原理
及 动力学 示意 图如 图 2所示 。
1 转 向系统模 型 的建 立
转 向柱式 E S工作 流程 如 图 1所示 。 当驾驶 P
图 I 转 向 柱 式 E S工 作 流 程 P
1 1 E S 系统 模 型 . P
员转动 方 向盘 时 , 人 轴 被 对 应 的 施 加 上某 个 角 输 度, 这个 角 度代 表 着 驾驶 员 的转 向意 图。根 据 转 动 圈数 和驾驶 员 转 向意 图 , 当输 入 轴 和输 出轴 之 间的期望 角度 存 在 一 个 偏 差 时 , 装 在 转 向盘 和 安
图 2 E S系 统 结 构 原 理及 动 力 学 示 意 图 P
(
一z ) +I r+( 卢 z
+
)/ — 咖 r
+(r ̄ 一 1 , k- E
E 矿+
一l ) = r E, k () 5
由于 刚度 系 数 k 非 常 微 小 , 以忽 略 , 可 因此 前轮 转 向模 型可 以简 化为 :
助力 电机 之 间 的 扭 矩 传 感 器 将 测 量 得 到 转 向 扭 矩 。基于转 向扭 矩 ( 由扭 矩 传 感 器测 量 得 到 ) 车 、
转 向柱 模型 : + 6 + ( 一 l h 6)= 前 轮转 向模 型 : + 6 + , — D r 后6 =