webots简介
Webots
Webots移動式機器人模擬軟體卓傑企業有限公司許孝友機器人的設計考量機器人的使用目的機器人所處的工作環境機構的設計致動器與感測元件的使用控制法則的設計與實現開發成本與時效性圖片資料來源:BIRG –LSL –I&C –Swiss Federal Institute of Technology LausanneWinter Semester Project 2003/2004, Lukas HohlWireless Remote Control and Monitoring of an Aibo Robot機器人的組成圖片資料來源:機器人的研究課題二足人形機器人的研究機器人定位與路徑規劃仿生機器人機器視覺群聚智慧圖片來源:/SonyInfo/QRIO/top_nf.html什麼是Webots?Webots是一套3D的機器人模擬軟體 內建完整資料庫可輕易建構機器人模型 可以直接在電腦上驗證機器人控制法則Webots的特色提供感測器與致動器資料庫,可模擬輪型、足型與各類機器人內建3D編輯器,可建構3D機器人模型應用C++ 或JAVA編輯機器人控制程式可模擬機器人物理行為可將模擬設計的控制程式移轉到實際機器人,如Aibo™, LEGO™, Mindstorms™, Khepera™與Hemission™Webots的特色可建立AVI或MPEG應用網際網路播放或簡報提供多種市售機器人控制程式原始碼和模型範例可模擬群體移動式機器人系統Webots的應用人形機器人的設計與實現 富士通HOAP2輪型機器人控制法則之研究 Kepherae-puck群聚系統的開發與設計足球機器人機械視覺的研究與應用富士通HOAP2Soccer Robots環境使用Supervisor控制器進行控制個別機器人可指定個別指定使用的智慧法則Webots設計程序Webots機器人模型架構e-puck 輪型機器人Webots 元件資料庫感測器資料庫: 距離感測器 光感測器 GPS 空間定位 攝影機 位置與力感測器 增量編碼器致動器資料庫:差速輪系馬達單元獨立輪系馬達伺服驅動器 LED傳輸控制: 發射器 接收器 電池與充電區超級機器人Scene Tree樹狀圖結構設定環境參數建立物件模擬環境的建立機器人活動範圍設定可視範圍與角度障礙物的配置環境物理屬性的設定機器人模型的建立使用致動器與感應器資料庫來建制機器人控制程式的撰寫軟體安裝完已經已提供一個C語言編輯環境,使用者亦可透過其他程式語言編輯控制器Webots同時提供TCP/IP介面,讓使用者可以由遠端來進行機器人行為的控制由模擬到實物使用Webots進行機器人模擬由PC對機器人進行遠端控制藉Cross-Complation將控制程式轉移到晶片上控制器於機器人本上,同時藉由PC監控機器人的行為圖片資料來源:BIRG –LSL –I&C –Swiss Federal Institute of Technology LausanneWinter Semester Project 2003/2004, Lukas HohlWireless Remote Control and Monitoring of an Aibo Robote-puck 輪型機器人e-puck 輪型機器人e-puck 電路架構e-puck 聲音接受器e-puck 加速規e-puck 距離感測器e-puck 模擬範例e-puck 模擬範例Webots移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例移動式機器人模擬範例使用Webots的優缺點 透過Webots我們可以提前開始設計與驗證機器人控制策略使用Webots可以避免控制器不當而減少損耗可以不受場地限制進行程式測試沒有辦法模擬機器人在碰撞後損壞的情形無法進行原件因耐久度而產生的變化謝謝各位的光臨如有任何需求請來電或Email 洽詢Tel : (02)2981-2187Email : webmaster@。
WebOS是什么

•
其实,将桌面计算机的日常任务迁移到Web上 这一提出来十年之久的概念正在日益成为现实。 • 将Web作为操作系统和减少对Windows桌面 软件依赖性的理念可以追溯到在1990年代中期诞 生的网景浏览器。从技术上说,所谓的Web操作 系统仍然需要依赖于一种基础的操作系统━━例 如Windows或Linux,将用户的操作系统翻译为硬 件功能。但Web操作系统的支持者将更多的最终 用户计算任务迁移到了浏览器中,声称这会使得 选择何种操作系统显得无足轻重。
•
Salesforce和YouOS等公司已经开始从事开发它们称之 为互联网操作系统的产品,微软也已经组建了一个 Windows Live Core团队,开发在互联网上运行的服务。 • 市场上出现了越来越多的在浏览器中模拟计算机桌面 的服务,这些也被称作Web操作系统的Webtop产品使人 们能够完成大多数的希望在Web上完成的任务。Laszlo Systems上个月推出了它称之为Laszlo Webtop的产品, 使用户能够在一个浏览器中运行多个桌面风格的应用软件。 例如,用户可以在同一个Web浏览器“容器”中运行 Laszlo基于Web的电子邮件产品、联系人列表管理器、即 时通讯软件。
•
2、Outlook/Outlook Express/Foxmail你 还需要么?OL/OE一般来说文件夹内信件数 千后就会很慢,存储文件超过1G后就非常 不稳定(Foxmail没测过),而Gmail现在2G 多了还是那么飞快。 • 3、Acdsee还需要么?我的图片都在 Flickr了。呵呵,这个服务不是Google的, 但是Google做一个会很难么?
https
:///?tn=91649221_hao_pg
WebOS是什么
• [文章导读] Webos或者我们称为网络操 作系统,是一种基于浏览器的虚拟的操作 系统,用户通过浏览器可以在这个Webos 上进行应用程序的操作,而这个应用程序 也不是普通的应用程序,是网络的应用
Web之父蒂姆·伯纳斯—李
We b之父蒂姆·伯纳斯—李蒂姆·伯纳斯一李出生于伦敦一个书香门第,父母都是计算机科学研究的先驱。
早在孩童时代蒂姆就接触到计算机,平常最喜爱的游戏就是用穿孔卡片拼搭"计算机",还在穿孔纸带上画图。
后来蒂姆进入大学,1976年蒂姆从牛津大学物理系毕业后,曾经供职于英国一些高技术公司,从事集成电路和系统设计研究,其出众的才华逐渐得以展露。
1984年,一个偶然的机会,蒂姆来到瑞士的日内瓦,进入著名的由欧洲原子核研究会CERN建立的粒子实验室。
在这里年轻的蒂姆接受了一项极富挑战性的工作:为了使欧洲各国的核物理学家能通过计算机网络及时沟通传递信息进行合作研究,委托他开发一个软件,以便使分部在各国各地物理实验室、研究所的最新信息-数据、图像资料可供大家共享。
软件开发虽非蒂姆的本行,但强有力的诱惑促使他勇敢地接受了这个任务。
早在牛津大学主修物理时蒂姆就不断地思索,是否可以找到一个"点",就好比人脑,能够透过神经传递、自主作出反应。
经过艰苦的努力,他编制成功了第一个高效局部存取浏览器"Enguire",并把它应用于数据共享浏览等,取得了成功。
初战胜利大大激发了蒂姆的创造的热情,小范围的计算机联网实现信息共享已不再是目标,蒂姆把目标瞄向了建立一个全球范围的信息网上,以彻底打破信息存取的壁垒。
1989年3 月,蒂姆向CERN 递交了一份立项建议书,建议采用超文本技术(Hypertext)把CERN内部的各个实验室连接起来,在系统建成后,将可能扩展到全世界。
这个激动人心的建议在CERN引起轩然大波,但这里终究是核物理实验室而非计算机网络研究中心,虽有人支持但最后仍没有被通过。
蒂姆并没有灰心,他花了2个月重新修改了建议书,加入了对超文本开发步骤与应用前景的阐述,用词恳切,并再一次呈递上去;这回终于得到了上司的批准。
于是蒂姆得到了一笔经费,购买了一台NEXT 计算机,并率领助手开发试验系统。
webots motor参数

Webots Motor 参数1. 简介Webots是一个先进的机器人仿真软件,用于设计、模拟和控制机器人。
在Webots 中,可以使用各种传感器和执行器模拟机器人的行为。
其中,Motor(电机)是Webots中的一个重要组件,用于控制机器人的运动。
本文将介绍Webots Motor的参数设置,包括类型、属性和使用方法。
我们将深入探讨如何在Webots中正确配置和使用Motor,以实现精确的机器人运动控制。
2. Motor 类型在Webots中,有三种类型的Motor可供选择:2.1 Position MotorPosition Motor(位置电机)是一种可以控制机器人关节角度的电机。
通过设置目标位置,可以使机器人的关节转动到指定的角度。
Position Motor通常用于模拟机器人的关节运动。
2.2 Velocity MotorVelocity Motor(速度电机)是一种可以控制机器人关节角速度的电机。
通过设置目标速度,可以使机器人的关节以指定的角速度旋转。
Velocity Motor通常用于模拟机器人的关节速度控制。
2.3 Torque MotorTorque Motor(扭矩电机)是一种可以控制机器人关节扭矩的电机。
通过设置目标扭矩,可以模拟机器人关节的受力情况。
Torque Motor通常用于模拟机器人的关节力控制。
3. Motor 属性3.1 名称(Name)Motor的名称属性用于在Webots中唯一标识一个Motor。
通过名称属性,可以在代码中准确地引用和控制Motor。
3.2 位置(Position)Position属性表示Motor当前的角度或位置。
对于Position Motor,可以通过设置该属性来控制Motor的目标位置。
对于Velocity Motor和Torque Motor,该属性表示Motor当前的位置信息。
3.3 速度(Velocity)Velocity属性表示Motor当前的角速度或线速度。
web_os

2 、 eXo Enterprise WebOS
使用了大量的 Web2.0 元素构 造 ,使用了大 量的 AJAX 和 Jacascript,因 此它使用起来 是相当方便的, 即使在没有互 联网连接的情 况下也可以使 用。
3 、 WidgetPlus
顾名思义,这 是一个以 Widget 为基础 构成WebOS, 由于 Widget 的开放性,这 个 OS 提供功 能必将会越来 越强大。
目前主流的WEB OS
国内主流:仿Xp操作系统界面的网 丫场WGOS,比如完全原创的 EPOKOS等。
网丫场:/
国外主流:eye OS,Goowy, Glide,Desktoptwo,Craythur等。
网丫场界面
1 、 EyeOS
EyeOS 是 一个开源软 件,可以下 载使用也可 以在其服务 器上在线使 用。拥有丰 富的网络程 序以及办公 套件,个性 化强度高。
4 、 YouOS
YouOS 是一个非 常优秀的 WebOS , 使用 JavaScript 来与服务器交换数 据 , 在进行下一 步操作之前 ,上 一步的操作会被记 录,方便返回。另 外,YouOS 在在 线协同操作方面做 得非常优秀 。
5 、 TomOS
不能不提的 中文 webOS 服务,很多 功能都是符 合中国人的 使用习惯的, 因此使用起 来会非常得 心应手。
分析认为 WebOS 的应用和推广应该迫切解 决的问题有以下几方面: 1、 减少网络数据传输量,提高用户交互响 应速度 。 2、 提供更多的免费扩展功能 。 3、足够的用户文件存储空间。 4、稳定的服务与数据安全保障
WEB OS的未来
虽然Web OS不会替代现行的操作系统,但是它给予人们工作很大的可移 动性与跨平台性,相信Web OS会得到长足发展。 随着网络的发展,WebOS是一种必然的趋势.到时可以想象,我们大部分 人可以直接打开浏览器,进行其本的娱乐与办公.试想一下,到时可能是电脑 的回归,再次走向终端的发展. WebOS的雏形,可分为几方面来看: 1.我的文档,存储着我们所需要的相关信息; 2.办公软件,基本的网络办公软件,能进行基本的文档编辑,表格制作, 如Google电子制表软件Spreadsheets,收购的网络文字处理软件厂商Writely 等; 3.多媒体服务,所有的媒体文件存储在服务器上,在WebOS上只有我们 播放列表,通过流媒体等技术我们进行欣赏,此时我们再不用担心硬盘空间 不够用了; 4.IM聊天,能够在网络上与好友语音视频聊天,所有的信息能存储在服 务器上,同时还可以将文档方便传递给好友; 5.信息平台,能将我们的信息公布在平台上,同时接收我们所感兴趣的别 人的信息,如新闻,或是商品信息; 6.娱乐游戏,提供了诸多的游戏供用户选择; 7 .邮件服务,相关的邮件操作.
WebService概念

Web Service概念什么是Web Service呢?从表面上看,Web Service就是一个应用程序,它向外界暴露出一个能够通过Web进行调用的API。
这就是说,你能够用编程的方法通过Web调用来实现某个功能的应用程序。
例如,笔者创建一个Web Service,它的作用是查询某公司某员工的基本信息。
它接受该员工的编号作为查询字符串,返回该员工的具体信息。
你可以在浏览器的地址栏中直接输入HTTP GET请求来调用罗列该员工基本信息的ASP页面,这就可以算作是体验Web Service了。
从深层次上看,Web Service是一种新的Web应用程序分支,它们是自包含、自描述、模块化的应用,可以在网络(通常为Web)中被描述、发布、查找以及通过Web来调用。
Web Service便是基于网络的、分布式的模块化组件,它执行特定的任务,遵守具体的技术规范,这些规范使得Web Service能与其他兼容的组件进行互操作。
它可以使用标准的互联网协议,像超文本传输协议HTTP和XML,将功能体现在互联网和企业内部网上。
Web Service平台是一套标准,它定义了应用程序如何在Web上实现互操作性。
你可以用你喜欢的任何语言(笔者用的是C#),在你喜欢的任何平台上写Web Service。
Web Service的技术支持Web Service平台需要一套协议来实现分布式应用程序的创建。
任何平台都有它的数据表示方法和类型系统。
要实现互操作性,Web Service平台必须提供一套标准的类型系统,用于沟通不同平台、编程语言和组件模型中的不同类型系统。
目前这些协议有:1.XML和XSD可扩展的标记语言XML是Web Service平台中表示数据的基本格式。
除了易于建立和易于分析外,XML主要的优点在于它既与平台无关,又与厂商无关。
XML是由万维网协会(W3C)创建,W3C制定的XML SchemaXSD定义了一套标准的数据类型,并给出了一种语言来扩展这套数据类型。
webots简介
Webots 概述
#include <webots/robot.h> #include <webots/differential_wheels.h> #include <webots/distance_sensor.h> #define TIME_STEP 64 int main() { wb_robot_init(); // initialize Webots WbDeviceTag ds = wb_robot_get_device("ds"); // get handle and enable distance sensor wb_distance_sensor_enable(ds, TIME_STEP); while (1) {// control loop double v = wb_distance_sensor_get_value(ds); // read sensors if (v > 512) {// if obstacle detected wb_differential_wheels_set_speed(-600, 600); // turn around } else { wb_differential_wheels_set_speed(600, 600); } // go straight wb_robot_step(TIME_STEP); // run a simulation step } return 0; }
Transform
Derived from Group. Direct derived nodes: Solid. The Transform node is a grouping node that defines
Webots学习日志:官方教程要点

Webots学习⽇志:官⽅教程要点⼀、前⾔与在线资料与Gazebo相⽐,Webots的中⽂⼊门资料相对较少,且基本上都是从Webots官⽅⼊门教程中摘取部分翻译出来的。
要想了解Webots的全貌,还得从Webots官⽅⽂档出发。
Webots官⽅⽂档中,核⼼⽂档主要有三份,建议的学习或阅读顺序依次是:(1)⼊门教程:(2)参考⼿册:(3)⾃动驾驶专题:另外,还有两份⽂档,⼀份是关于最新动态的(主要是版本更新⽇志和最新功能介绍),另⼀份是关于技术问答的。
(1)最新动态:(2)技术问答:同时,官⽅还提供了云端仿真环境,供研究者或兴趣者测试相关算法,并在测试结束后⽣成排名。
(1)云端服务:⼆、本⽂⽬的与离线⽂档第⼀次学习Webots时就全⾯阅读了两三遍《⼊门教程》和《参考⼿册》,并结合实际操作做了详细的笔记,但所作笔记都是浓缩的要点且某些要点从不同的章节总结⽽来,也有⼀些当时认为不重要点没记录。
当过了较长⼀段时间没使⽤Webots,希望看笔记快速回忆时,发现不能确切地将某些知识点映射到《⼊门教程》或《参考⼿册》对应的章节。
于是⼜重新浏览⼀遍《⼊门教程》,浏览过程中发现的确很多知识点都是熟悉的或⽬前不关注的,如果能直接定位到⾃⼰期望的知识点,那将节省不少的时间。
基于以上⽬的,决定⽤中⽂提炼出《⼊门教程》各个章节的要点,以供后续快速定位参考。
同时,对⼀些我认为较基础或较重要的内容作详细说明。
由于我主要的编程语⾔是C/C++和Python,所以涉及到编程语⾔相关的知识点,⾸先聚焦在C/C++,其次是Python,Java&Matlab将忽略。
不知道是不是墙的原因,国内⽹打开Webots在线官⽅⽂档很慢,甚⾄很多时候打不开(外⽹则很顺畅)。
然⽽,其实Webots安装后,官⽅⽂档也相应的安装了,位于WEBOTS_HOME/docs下。
直接⽤浏览器打开index.html是不可⾏的,需要按README.md操作。
浏览器中的操作系统——Web OS
浏览器中的操作系统——Web OS
键
【期刊名称】《软件指南》
【年(卷),期】2006(000)007
【摘要】继Web2.0之后,Web OS成为当前业界议论纷纷的话题,那么Web OS到底是个什么东东呢?Web OS的全称是Web-based Operating System,其字面意思是基于网络的操作系统,通俗说就是基于浏览器的虚拟操作系统。
用户可以通过浏览器,在Web OS进行一些程序操作,如普通的操作系统中,进行文字处理要运行Word、WPS等程序,而在Web OS上,也可以启动某个功能组件来进行文字处理,而且该功能组件是存在于网络上而非本地计算机。
这样看起来,Web OS更像一个应用程序集,你不用安装大量的软件,只要通过浏览器上网,就能实现各种各样的功能操作。
【总页数】2页(P63-64)
【作者】键
【作者单位】无
【正文语种】中文
【中图分类】TP311.13
【相关文献】
1.让我们迈向Web 3.0——在浏览器中整合Web IM
2.Firefox OS的奇幻漂流全面解析新一代OpenWeb移动操作系统
3.webOS之殇操作系统之困
4.Palm:webOS 1.4.5操作系统即将发布
5.webOS之殇操作系统之困
因版权原因,仅展示原文概要,查看原文内容请购买。
Webasto(中国)公司及产品介绍

1965 Air conditioning for buses 为巴士生产空调
1969 Start of the development of a tilt and slide sunroof 开始开发内藏式天窗
Product Innovations 01.01.06/Webasto China Profile for Thermo Unit.ppt Page 4
1937 Supplier of folding roofs for Daimler-Benz 开始为奔驰生产折叠车顶
1901 Production of simple stamped metal parts, wire straps and household appliances 生产简单的金属零部件
1996 Lamella roof for the Mercedes-Benz A Class 为奔驰A级车生产叠片式天 窗
Product Innovations 01.01.06/Webasto China Profile for Thermo Unit.ppt Page 6
Webasto History (V) 威百思特历史 (5)
2001 MB Sportcoupé and Mini panorama roof + Fiat Stilo glass lamella roof 为跑车和Mini生产全景车顶和叠片天窗
Product Innovations 01.01.06/Webasto China Profile for Thermo Unit.ppt Page 7
Product Innovations 01.01.06/Webasto China Profile for Thermo Unit.ppt Page 8
Web Service基本概念

Web Service基本概念Web Service也叫XML Web Service WebService是一种可以接收从Internet 或者Intranet上的其它系统中传递过来的请求,轻量级的独立的通讯技术。
是:通过SOAP在Web上提供的软件服务,使用WSDL文件进行说明,并通过UDDI进行注册。
XML:(Extensible Markup Language)扩展型可标记语言。
面向短期的临时数据处理、面向万维网络,是Soap的基础。
SOAP:(Simple Object Access Protocol)简单对象存取协议。
是XML Web Service 的通信协议。
当用户通过UDDI找到你的WSDL描述文档后,他通过可以SOAP调用你建立的Web服务中的一个或多个操作。
SOAP是XML文档形式的调用方法的规范,它可以支持不同的底层接口,像HTTP(S)或者SMTP。
WSDL:(Web Services Description Language) WSDL 文件是一个 XML 文档,用于说明一组 SOAP 消息以及如何交换这些消息。
大多数情况下由软件自动生成和使用。
UDDI (Universal Description, Discovery, and Integration) 是一个主要针对Web服务供应商和使用者的新项目。
在用户能够调用Web服务之前,必须确定这个服务内包含哪些商务方法,找到被调用的接口定义,还要在服务端来编制软件,UDDI是一种根据描述文档来引导系统查找相应服务的机制。
UDDI利用SOAP消息机制(标准的XML/HTTP)来发布,编辑,浏览以及查找注册信息。
它采用XML格式来封装各种不同类型的数据,并且发送到注册中心或者由注册中心来返回需要的数据。
XML Web Service的特点Web Service的主要目标是跨平台的可互操作性。
为了实现这一目标,Web Service 完全基于XML(可扩展标记语言)、XSD(XML Schema)等独立于平台、独立于软件供应商的标准,是创建可互操作的、分布式应用程序的新平台。
集团公司简介文档
附加业务
LOREM
LOREM
LOREM
LOREM
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR 本具体内容
添加标题
单击此处添加文 本具体内容
添加标题
单击此处添加文 本具体内容
合作伙伴
添加标题
添加标题
添加标题
添加标题
添加标题
添加标题
添加标题
添加标题
2012
2013
2014
2015
2016
2017
2018
2019
Business Practice Report
TEOS GROUP
中国塔奥斯物联网集团有限公司
企业简介
添加标题
单击此处添加文本具体内容,简明扼要的阐 述您的观点。
添加标题 添加标题
添加标题
添加标题
添加标题
企业文化
您的内容文字
请在这里输入您的内容文字请在这里输入您的内容文字
您的内容文字
请在这里输入您的内容文字请在这里输入您的内容文字
组织架构
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR LOREM
LOREM IPSUM DOLOR LOREM
发展历史
2011
2012
2013
2014
2015
2016
添加标题
单击此处添加文 本具体内容
添加标题
单击此处添加文 本具体内容
面试题:什么是websocket

⾯试题:什么是websocket⾯试题:什么是websocket参考链接:1. websocket使⽤也⽐较多的,它和http协议没有太多关系,但是有交集在于:(Websocket 其实是⼀个新协议,跟 HTTP 协议基本没有关系,只是为了兼容现有浏览器,所以在握⼿阶段使⽤了 HTTP)2. ⾸先,WebSocket 是⼀个持久化的协议,相对于 HTTP 这种⾮持久的协议来说。
(相对于http来说,http是⼀次请求⼀次响应,结束:request--response结束。
在通讯过程中,⼀直在请求响应,反复如此)⽽websocket通过⼀次http握⼿,整个通讯建⽴在⼀次连接状态中,服务端会⼀直知道你的信息,知道关闭websocket,不需要服务端反复解析。
在传输中节省流量和时间,提⾼性能3. HTTP 协议有⼀个缺陷:通信只能由客户端发起。
⽽websocket协议,实现了服务器可以主动向客户端推送信息,客户端也可以主动向服务器发送信息,是真正的双向平等对话,属于的⼀种。
http websocket区别4. WebSocket 的⽤法相当简单。
var ws = new WebSocket("wss://");ws.onopen = function(evt) {console.log("Connection open ...");ws.send("Hello WebSockets!");};ws.onmessage = function(evt) {console.log( "Received Message: " + evt.data);ws.close();};ws.onclose = function(evt) {console.log("Connection closed.");};图⽰:WebSocketWebSocket协议为web应⽤程序客户端和服务端之间提供了⼀种全双⼯通信机制。
webOS

2010年10月,webOS 2.0推出,提出了“堆栈”的概念。
顾名思义,当你在手机上使用多个任务时,多任务卡片根据相互之间的相关性以扇形堆积起来。
在突破性的卡片式隐喻操作的基
础上,HP将其称为下一代的多任务操作。
webOS之前的多任务就已经十分优秀,不过缺点就是一旦同时运行过多任务的话,不同任务之间的切换会变得稍显麻烦。
堆栈功能会自动将不同任务的选项卡进行分类,然后按组排列出来,同时你也可以通过拖拽自己组合相关任务卡片,这样多个任务间切换的速度会得到提升,操作变得更加简单方便。
手势操作:手势区域是Palm一个了不起的创意,用户可以通过各种手势与系统进行交互。
尤其是在webOS平台上,配合手势完成卡片的关闭、切换和其他命令,十分的方便。
webOS手势可以实现多种诸如下列的行为:
1.卡片浏览模式,向上滑动把卡片拖出屏幕即可关闭当前卡片。
2.在使用某个应用的时候,用手指区向上滑动至屏幕两次,启动Launcher。
3.后退操作(保留当前界面中所有操作并返回上级)。
iOS的界面大同小异,如果说不同的点可能就是将通讯录整合到地图系统中。
照片:
webOS 3.0种照片的布局还是很独特的,相比较iOS的界面也更为复杂。
照片和视频集成在了一起,在横盘模式下采用两栏界面。
点击进入专辑后,会显示这个专辑内的所有图片,点击编辑后可以分享、移动、打印以及删除。
除此之外很有意思的是,你还可以看到Facebook的双向同步。
Webots简介
Webots简介Webots 简介1、引⾔随着机器⼈技术的不断发展,越来越多的⼩伙伴开始成为机器⼈开发者。
在机器⼈开发过程中,经常需要对机器⼈进⾏仿真,这时就需要⽤到机器⼈仿真软件。
机器⼈仿真软件⽤于机器⼈算法的设计、测试和验证,可以⼤幅提⾼开发者的⼯作效率,降低开发成本。
Webots是⼀款优秀的机器⼈仿真软件,功能强⼤,易于使⽤。
但由于Webots开源时间⽐较晚,在国内的市场占有率较低,⽬前使⽤Webots 的开发者还不是很多。
Webots由Cyberbotics公司开发,是⼀款开源的多平台机器⼈仿真软件,为机器⼈的建模、编程和仿真提供了完整的开发环境。
Webots内核基于开源动⼒学引擎ODE和OpenGL,可以在Windows,Linux和macOS上运⾏,并且⽀持多种编程语⾔(C/C++,Python,Java,MATLAB)。
Webots简单易⽤,⽂档齐全,⽀持多种类型的机器⼈,是⼀款⾮常优秀的机器⼈仿真平台软件。
以下视频是Webots⽰例项⽬的实机演⽰视频,⼤家可以直观了解以下Webots。
我从2017年开始接触webots,现在主要⽤webots做四⾜机器⼈的仿真。
在学习webots的过程中,发现⽹上系统的Webots中⽂教程⽐较少,因此我在这⾥尝试给⼤家写⼀份简易的Webots机器⼈仿真教程,以供参考。
由于我本⼈精⼒有限,对webots的学习和使⽤并不算精通,教程中出现错误在所难免,也欢迎⼤家指出教程中的错误之处,以便我及时改正以免造成误导。
2、教程结构本教程为简易教程,旨在帮助⼤家快速上⼿Webots,并不打算所有内容全讲⼀遍,但是熟悉Webots之后查阅官⽅⽂档也很简单。
教程结构如下图所⽰。
教程结构教程主要分为webots功能介绍和实践项⽬两个部分。
功能介绍部分会逐⼀介绍webots概况,操作界⾯,机器⼈的建模,控制器和常⽤节点。
实践项⽬有三个,包括四轮⼩车,倒⽴摆和四⾜机器⼈。
webots使用介绍

Webots基于ODE开源动力学仿真软件(/) 下面通过一个例子快速上手webots1.新建项目安装完Webots 6.4.3后,双击出来欢迎界面,如下点第一个Guided Tour可以看它自带的例子。
点右下角的“Your Project”就新建了一个项目,软件的主界面分为四大块。
1)3D窗口用于显示仿真环境(基于openGL)(新建后系统默认设置是一个棋盘形的平地以及视角、灯光、重力加速度等)2)场景树用于显示仿真环境中的物体属性,鼠标双击仿真环境中的物体即可看到场景树中对应的信息。
里面有Worldinfo等几个项,含义以后再说。
3)代码区用于显示世界文件或控制器的代码,webots自带IDE(MinGW, 编程语言支持C/C++、Python、Java等),也可以用其他IDE,如visual studio。
4)控制台显示调试的信息和控制器的输出参数。
2.编写控制器程序——controller什么是控制器?建立世界模型和机器人模型相当于搭建实验场地和物理平台。
这时的机器人相当于没有装操作系统的电脑,什么也干不了。
要想让机器人干点什么就要通过控制器程序控制它。
可以用以下程序语言:C,C++,Java,Python,Matlab。
一个控制器程序可以给多个机器人同时用,但一个机器人一次只能用一个控制器。
操作:点工具栏上的 向导(wizard)——>新项目目录,弹出这是选择你新建的文件放置的位置。
选好后确定。
再进入 向导(wizard)——>新机器人控制器选C语言即可,确定,弹出文件名窗口,给你的文件夹起个名吧,最好别用中文。
起好名后确定,弹出看到了吧,它会自动在你选择的位置新建以上文件和目录。
我起的名字是turn。
确定后在左面出现了控制器的程序模版:对此修改即可,我们先写个简单的控制器,功能是让机器人转圈。
程序代码如下,将其完全覆盖原来的模版即可:#include <webots/robot.h>#include <webots/differential_wheels.h>#define TIME_STEP 32int main(int argc, char **argv){wb_robot_init();// set up the speedswb_differential_wheels_set_speed(100, 200);do {} while (wb_robot_step(TIME_STEP) != -1);wb_robot_cleanup();return 0;}复制后点编辑区上工具栏上的保存,再点编译,最后点生成可执行文件。
农业采摘机械手虚拟仿真设计
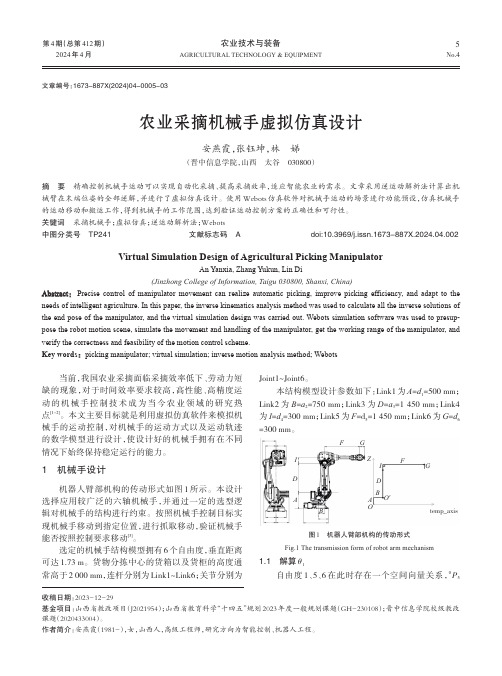
第4期(总第412期)2024年4月农业技术与装备AGRICULTURAL TECHNOLOGY&EQUIPMENT No.4农业采摘机械手虚拟仿真设计安燕霞,张钰坤,林娣(晋中信息学院,山西太谷030800)摘要精确控制机械手运动可以实现自动化采摘、提高采摘效率,适应智能农业的需求。
文章采用逆运动解析法计算出机械臂在末端位姿的全部逆解,并进行了虚拟仿真设计。
使用Webots仿真软件对机械手运动的场景进行功能预设,仿真机械手的运动移动和搬运工作,得到机械手的工作范围,达到验证运动控制方案的正确性和可行性。
关键词采摘机械手;虚拟仿真;逆运动解析法;Webots中图分类号TP241文献标志码A doi:10.3969/j.issn.1673-887X.2024.04.002Virtual Simulation Design of Agricultural Picking ManipulatorAn Yanxia,Zhang Yukun,Lin Di(Jinzhong College of Information,Taigu030800,Shanxi,China)Abstract:Precise control of manipulator movement can realize automatic picking,improve picking efficiency,and adapt to the needs of intelligent agriculture.In this paper,the inverse kinematics analysis method was used to calculate all the inverse solutions of the end pose of the manipulator,and the virtual simulation design was carried out.Webots simulation software was used to presup‐pose the robot motion scene,simulate the movement and handling of the manipulator,get the working range of the manipulator,and verify the correctness and feasibility of the motion control scheme.Key words:picking manipulator;virtual simulation;inverse motion analysis method;Webots当前,我国农业采摘面临采摘效率低下、劳动力短缺的现象,对于时间效率要求较高,高性能、高精度运动的机械手控制技术成为当今农业领域的研究热点[1-2]。
机器人虚拟仿真及控制技术研究_陈伟
陈伟,陈一民,汪地,等:机器人虚拟仿真及控制技术研究2010,31(20)44550引言传统的机器人研发面临着不能有效验证设计的合理性、无法避免设计失误给机器人研发工作带来的影响,将虚拟技术与仿真技术相结合的虚拟仿真技术能够给机器人的研发工作提供可视化效果。
虚拟仿真技术具有成本低、效率高和灵活性好等特点,应用范围很广,相关研究较多,如上海大学对N 自由度机器人进行了数学建模和仿真研究,借助Matlab 和Simulink 的计算和绘图能力实现了N 自由度机器人的运动仿真[1]。
哈尔滨工程大学提出了通过虚拟样机进行远程控制的康复机器人系统方案,通过在Matlab 环境下实现虚拟仿真,达到可视化效果[2]。
文献[1-2]都是基于Matlab 开发平台的,其可扩展性和通用性不是很好,且其显示效果不佳。
张晨旭通过使用VC++与OpenGL 相结合的技术研究了虚拟仿真技术在机器人仿真中的应用[3]。
唐安慧等主要探索构建三维仿真平台的总体框架,并对平台所涉及的各项关键技术进行了研究[4]。
赵小川等通过使用Webots 完成了仿真六足机器人的仿真造型,并通过仿真实验验证了仿生六足机器人机构的合理性和运动的灵活性[5]。
文献[6]提出了一种使用模糊逻辑的足球机器人传球策略的实现,通过使用虚拟仿真技术实现了对所设计的系统的评估。
其中文献[1-2]都是基于Matlab 开发平台的,其可扩展性和通用性不是很好,且其显示效果不佳。
文献[3-6]未对适合机器人仿真的碰撞检测问题作深入研究,而碰撞检测是虚拟现实系统中的研究难点。
其主要的任务是判断物体模型之间、模型与场景之间是否发生了碰撞,以及给出碰撞位置、穿刺深度等信息。
效果逼真、快速检测是这类算法的目收稿日期:2009-12-07;修订日期:2010-03-10。
仿真技术DOI:10.16208/j.issn1000-7024.2010.20.04744562010,31(20)计算机工程与设计Computer Engineering and Design标。
charlotte's web故事情节简介英语

charlotte's web故事情节简介英语篇1Charlotte's Web is a touching story that takes place on a farm. The main character is Wilbur, a little pig who faces the terrifying prospect of being slaughtered. Poor Wilbur! How sad and scared he was! But then, his dear friend Charlotte, a wise and kind spider, came to his rescue. How wonderful it was! Charlotte came up with a brilliant plan to save Wilbur. She wove words like "Some Pig" and "Terrific" in her web to make Wilbur seem special and valuable.Not only that, Wilbur also had interesting interactions with other animals in the barn. The goose was chatty, and the rat was always busy. They all added fun and warmth to the story.The story unfolds with a series of exciting events and heartwarming moments. It shows the power of friendship and the importance of caring for others. Isn't it a story that touches our hearts deeply?篇2Charlotte's Web is a wonderful story that tugs at our heartstrings. Wilbur, the young pig, faces the threat of being slaughtered. But, lucky for him, he has a true friend - Charlotte, the spider.Charlotte comes up with a brilliant plan to save Wilbur's life. She weaves words like "Some Pig" and "Terrific" in her web. How amazing isthat? Everyone is astonished and starts to pay attention to Wilbur.As Wilbur grows, his psychological changes are touching. At first, he is scared and helpless. But with Charlotte's support and his own experiences, he becomes brave and confident.The story progresses and the bond between Wilbur and Charlotte deepens. We can't help but wonder how their friendship will overcome all the difficulties.In the end, though Charlotte passes away, her spirit lives on. This story makes us believe in the power of friendship and the beauty of life. Isn't it a story that we will remember forever?篇3Charlotte's Web is a touching story that warms our hearts. Wilbur, a vulnerable piglet, was saved from being slaughtered. Along his journey, he formed an unbreakable bond with Charlotte, a wise and kind spider.At first, Wilbur was weak and helpless, constantly fearing for his life. But with Charlotte's encouragement and support, he gradually grew stronger and braver! How amazing it was! Charlotte weaved words in her web to praise Wilbur, making him famous and saving his life.The friendship between them was so deep and pure. They shared joy and sadness together. When Wilbur faced difficulties, Charlotte was always there to help.And remember the scene when the farmer witnessed the true emotionsamong the animals? He was moved and changed his mind about Wilbur. Isn't it a wonderful moment that shows the power of love and friendship?This story tells us that friendship can bring about miracles and help us grow. What a beautiful and meaningful story it is!篇4Charlotte's Web is a heartwarming story that takes us on an emotional journey. Wilbur, a young pig, is in constant fear of being slaughtered. But then, his dear friend Charlotte, a wise and kind spider, comes to his rescue. Remember the touching scene when Charlotte, despite her own weakening strength, exhausted her life to weave words in her web to praise Wilbur? Those words not only saved Wilbur's life but also showed the depth of their friendship. How about the tense moment when Wilbur participated in the fair competition? The anticipation and anxiety were palpable as we held our breath, hoping for a favorable outcome for Wilbur. Through all these adventures and challenges, Wilbur and Charlotte's bond grew stronger and stronger. Their story teaches us about the power of friendship, the value of life, and the beauty of selflessness. Isn't it a tale that tugs at our heartstrings and makes us believe in the magic of true connection?篇5Charlotte's Web is a truly touching story that has left a deep impression on my heart. One of the most unforgettable moments is whenCharlotte, weak and near the end of her life, has a heartfelt farewell with Wilbur. Her voice, filled with love and determination, says, "Goodbye, Wilbur. I have done my best for you. Take care of yourself." How could one not be moved by such a poignant scene?Another remarkable part is when Wilbur, inspired by Charlotte's selfless love and spirit, decides to carry on her kindness and warmth to other animals. He becomes a symbol of hope and friendship in the barn, just as Charlotte was before.The story shows us the power of friendship and sacrifice. It makes us wonder how much we are willing to do for our friends? And it also makes us reflect on the preciousness of life and the importance of love. What a wonderful story it is! It teaches us to cherish every moment and to be kind to those around us.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Webots 概述
Webots includes a set of sensors and actuators frequently used in robotic experiments, e.g. proximity sensors, light sensors, touch sensors, GPS, accelerometers, cameras, emitters and receivers, servo motors (rotational & linear), position and force sensor, LEDs, grippers, gyros and compass.
The robot controller programs can be written in C, C++, Java, Python and MATLAB.
Webots 概述
#include <webots/robot.h> #include <webots/differential_wheels.h> #include <webots/distance_sensor.h> #define TIME_STEP 64 int main() { wb_robot_init(); // initialize Webots WbDeviceTag ds = wb_robot_get_device("ds"); // get handle and enable distance sensor wb_distance_sensor_enable(ds, TIME_STEP); while (1) {// control loop double v = wb_distance_sensor_get_value(ds); // read sensors if (v > 512) {// if obstacle detected wb_differential_wheels_set_speed(-600, 600); // turn around } else { wb_differential_wheels_set_speed(600, 600); } // go straight wb_robot_step(TIME_STEP); // run a simulation step } return 0; }
Worlds are saved in .wbt files
Webots 结构
VRML
Nodes
VRML
VRML (Virtual Reality Modeling Language, pronounced vermal or by its initials, originally—before 1995—known as the Virtual Reality Markup Language) is a standard file format for representing 3-dimensional (3D) interactive vector graphics, designed particularly with the World Wide Web in mind. It has been superseded by X3D.
Webots 结构
1.world
A world, in Webots, is a 3D description of the properties of robots and of their environment.
It contains a description of every object: its position, orientation, geometry, appearance (like color or brightness),physical properties, type of object, etc.
Webots 结构
A Webots simulation is composed of these things:
1. A Webots world file that define one or more 3D robot and their environment.
2. Controller programs for the above robots. 3. An optional Supervisor.
Webots 概述
Webots uses the ODE (Open Dynamics Engine) for detecting of collisions and simulating rigid body dynamics. The ODE library allows one to accurately simulate physical properties of objects such as velocity, inertia and friction.
WEBOTS
机器人仿真软件介绍
Cyberbotics
报告内容
主流机器人软件开发平台 Webots概述 Webots结构 例子
主流机器人软件开发平台
平台名称 Evolution Robotics ERSP Microsoft Robotics Studio OROCOS Skilligent URBI Webots Player, Stage, Gazebo iRobot AWARE OpenJAUS CLARAty
VRML files are commonly called "worlds" and have the *.wrl extension (for example island.wrl).
#VRML V2.0 utf8
Background {
skyColor 0.3 0.3 0.3
}
Transform {
Webots is a 3D mobile robot simulator that allows to simulate different types of mobile robots .
The Webots project started in 1996, initially developed by Dr. Olivier Michel at the Swiss Federal Institute of Technology (EPFL) in Lausanne, Switzerland.
Webots 概述
Included Robots Models
AIBO ERS7 and ERS210, Sony Corporation BIOLOID (dog), Robotis E-puck HOAP-2, Fujitsu Limited Khepera mobile robot I, II, III, K-Team Corporation Koala, K-Team Corporation Lego Mindstorms (RCX Rover model) Nao V2, V3, Aldebaran Robotics MobileRobots Inc Pioneer 2, Pioneer 3-DX, Pioneer 3-AT Puma 560, Unimate
translation 0.0 -2.0 -3.0
children [
Shape {
appearance Appearance {
material Material {
diffuseColor 0.8 0.8 0.8
}
}
geometry Cylinder {
radius 0.2
height 4.2
}
平台 平台 控件库 机器学习插件 平台 仿真环境 平台 平台
平台
平台
所属类型 商用 非商业用途免费 开源且免费 商用 商用 商用 开源且免费 ebots is a professional robot simulator widely used for educational purposes.
}
]
}
Webots 结构
VRML
Nodes
Group
Direct derived nodes: Transform A Group node contains children nodes without
introducing a new transformation. It is equivalent to a Transform node containing an identity transform. A Group node may not contain subsequent Solid, device or robot nodes.
Solid
A Solid node represents an object with physical properties such as dimensions, a contact material and optionally a mass. The Solid class is the base class for collision-detected objects . Robots and device classes are subclasses of the Solid class. In the 3D window, Solid nodes
Transform
Derived from Group. Direct derived nodes: Solid. The Transform node is a grouping node that defines
a coordinate system for its children that is relative to the coordinate systems of its parent.