ABB机器人系统输入输出功能描述
ABB机器人系统输入输出信号解释
系统输出 Auto On Backup Error Backup in Progress
Cycle On Emergency Stop Execution Error Mechanical Unit Active Mechanical Unit Not Moving Motor Off Motor On Motor Off State Motor On State Motor Supervision On Motor Supervision Triggered Path Return Region Error
Power Fail Error
Production Execution Error Run Chain OK Simulated I/O Task Executing TCP Speed
TCP Speed Reference
说明 自动运行状态 备份错误报警 系统备份进行中状态,当备份结束后或者错 误时信号复位 程序运行状态 紧急停止 运行错误报警 激活机械单元 机械单元没有运行 电动机下电 电动机上电 电动机下电状态 电动机上电状态 动作监控打开状态 当碰撞检测被触发时信号置位 返回路径失败状态,机器人当前位置离程序 位置太远导致 动力供应失效状态,机器人断电后无法从当 前位置运行 程序执行错误报警 运行链处于正常状态 虚拟 I/O 状态,有 I/O 信号处于虚拟状态 任务运行状态 TCP 速度,用模拟输出信号反映机器人当前 实际速度 TCP 速度参考状态,用模拟输出信号反映机 器人当前指令中的速度
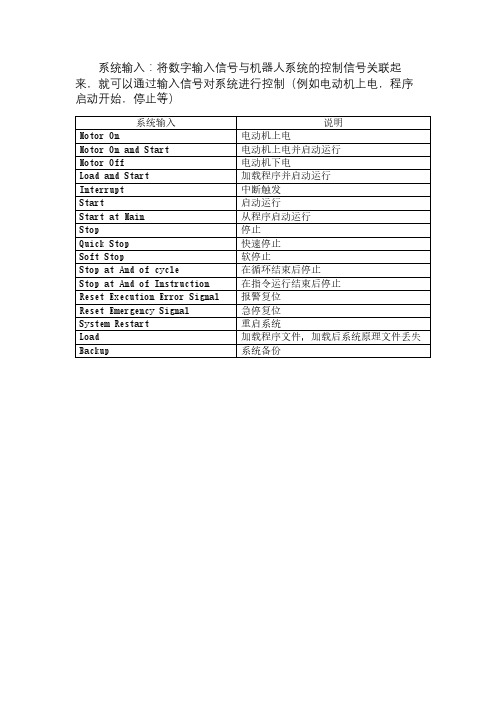
说明 电动机上电 电动机上电并启动运行 电动机下电 加载程序并启动运行 中断触发 启动运行 从程序启动运行 停止 快速停止 软停止 在循环结束后停止 在指令运行结束后停止 报警复位 急停复位 重启系统 加载程序文件,加载后系统原理文件丢失可以与数字输出信号关联 起来,将系统的状态输出给外围设备作控制只用(例如系统运行模 式、程序执行错误,急停等)
ABB机器人操作手册中文版

ABB机器人操作手册中文版一、ABB 机器人简介ABB 机器人是在工业自动化领域广泛应用的先进设备,以其高精度、高速度和高可靠性而闻名。
它能够在各种复杂的生产环境中执行多种任务,如物料搬运、焊接、装配、喷涂等,大大提高了生产效率和质量。
二、机器人系统组成ABB 机器人系统主要由机器人本体、控制器、示教器和周边设备组成。
1、机器人本体由机械臂、关节和末端执行器构成。
机械臂的设计和结构决定了其运动范围和灵活性。
关节采用高精度的电机和传动装置,确保精确的位置和姿态控制。
2、控制器是机器人的“大脑”,负责控制机器人的运动、逻辑和通信。
具备强大的计算能力和丰富的接口,可与其他设备进行集成。
3、示教器用于对机器人进行编程和操作。
具有直观的界面和操作按钮,方便操作人员设置参数和下达指令。
4、周边设备包括传感器、工装夹具、输送线等,与机器人协同工作,完成特定的生产任务。
三、安全注意事项在操作 ABB 机器人之前,必须充分了解并严格遵守安全规定,以防止事故发生。
1、安装和调试阶段确保机器人安装牢固,周边环境安全无障碍物。
在调试时,应设置警示标识,防止无关人员进入工作区域。
2、操作运行阶段操作人员必须经过专业培训,熟悉机器人的操作流程和紧急停止方法。
避免在机器人运动范围内停留或进行任何可能干扰机器人运行的行为。
3、维护保养阶段在进行维护保养前,务必切断机器人的电源,并挂上“禁止合闸”的标识。
只有具备资质的人员才能进行维护保养工作。
四、机器人的启动与关闭1、启动检查机器人本体、控制器和周边设备的连接是否正常。
打开控制器电源,等待系统初始化完成。
通过示教器启动机器人,并进行必要的初始化设置。
2、关闭先停止机器人的当前任务。
通过示教器选择关闭机器人系统。
关闭控制器电源。
五、示教器的使用示教器是与机器人交互的重要工具,以下是其主要功能和操作方法。
1、界面介绍显示机器人的状态信息,如位置、速度、关节角度等。
包含编程、操作、监控等功能菜单。
ABB机器人系统输入输出信号解释
系统输出 Auto On Backup Error Backup in Progress
Cycle Onor Mechanical Unit Active Mechanical Unit Not Moving Motor Off Motor On Motor Off State Motor On State Motor Supervision On Motor Supervision Triggered Path Return Region Error
说明 电动机上电 电动机上电并启动运行 电动机下电 加载程序并启动运行 中断触发 启动运行 从程序启动运行 停止 快速停止 软停止 在循环结束后停止 在指令运行结束后停止 报警复位 急停复位 重启系统 加载程序文件,加载后系统原理文件丢失 系统备份
系统输出:机器人系统的状态信号也可以与数字输出信号关联 起来,将系统的状态输出给外围设备作控制只用(例如系统运行模 式、程序执行错误,急停等)
系统输入:将数字输入信号与机器人系统的控制信号关联起 来,就可以通过输入信号对系统进行控制(例如电动机上电,程序 启动开始,停止等)
系统输入 Motor On Motor On and Start Motor Off Load and Start Interrupt Start Start at Main Stop Quick Stop Soft Stop Stop at And of cycle Stop at And of Instruction Reset Execution Error Signal Reset Emergency Signal System Restart Load Backup
Power Fail Error
Production Execution Error Run Chain OK Simulated I/O Task Executing TCP Speed
第二部分:ABB机器人基本输入输出指令
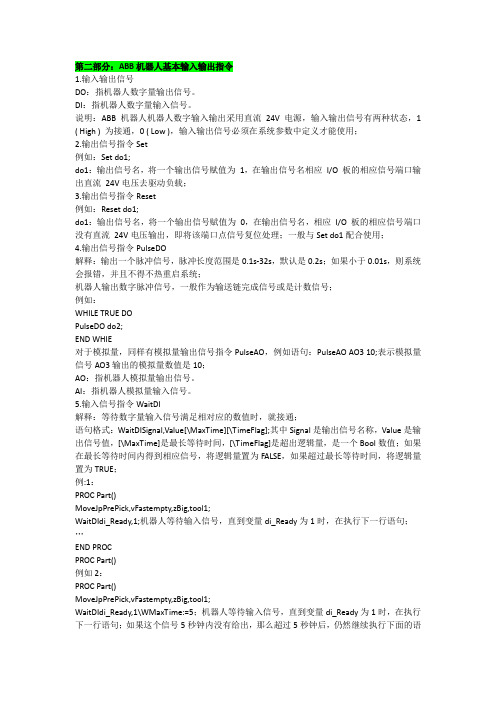
第二部分:ABB机器人基本输入输出指令1.输入输出信号DO:指机器人数字量输出信号。
DI:指机器人数字量输入信号。
说明:ABB机器人机器人数字输入输出采用直流24V 电源,输入输出信号有两种状态,1 ( High ) 为接通,0 ( Low ),输入输出信号必须在系统参数中定义才能使用;2.输出信号指令Set例如:Set do1;do1:输出信号名,将一个输出信号赋值为1,在输出信号名相应I/O 板的相应信号端口输出直流24V电压去驱动负载;3.输出信号指令Reset例如:Reset do1;do1:输出信号名,将一个输出信号赋值为0,在输出信号名,相应I/O 板的相应信号端口没有直流24V电压输出,即将该端口点信号复位处理;一般与Set do1配合使用;4.输出信号指令PulseDO解释:输出一个脉冲信号,脉冲长度范围是0.1s-32s,默认是0.2s;如果小于0.01s,则系统会报错,并且不得不热重启系统;机器人输出数字脉冲信号,一般作为输送链完成信号或是计数信号;例如:WHILE TRUE DOPulseDO do2;END WHIE对于模拟量,同样有模拟量输出信号指令PulseAO,例如语句:PulseAO AO3 10;表示模拟量信号AO3输出的模拟量数值是10;AO:指机器人模拟量输出信号。
AI:指机器人模拟量输入信号。
5.输入信号指令WaitDI解释:等待数字量输入信号满足相对应的数值时,就接通;语句格式:WaitDISignal,Value[\MaxTime][\TimeFlag];其中Signal是输出信号名称,Value是输出信号值,[\MaxTime]是最长等待时间,[\TimeFlag]是超出逻辑量,是一个Bool数值;如果在最长等待时间内得到相应信号,将逻辑量置为FALSE,如果超过最长等待时间,将逻辑量置为TRUE;例:1:PROC Part()MoveJpPrePick,vFastempty,zBig,tool1;WaitDIdi_Ready,1;机器人等待输入信号,直到变量di_Ready为1时,在执行下一行语句;…END PROCPROC Part()例如2:PROC Part()MoveJpPrePick,vFastempty,zBig,tool1;WaitDIdi_Ready,1\WMaxTime:=5;机器人等待输入信号,直到变量di_Ready为1时,在执行下一行语句;如果这个信号5秒钟内没有给出,那么超过5秒钟后,仍然继续执行下面的语句;…END PROC例如3:PROC Part()MoveJpPrePick,vFastempty,zBig,tool1;WaitDIdi_Ready,1\MaxTime:=1\TimeFlag:=bTimeout;机器人等待输入信号,直到变量di_Ready 为1时,在执行下一行语句,此时\TimeFlag:=0;如果这个信号5秒钟内没有给出,那么超过5秒钟后,仍然继续执行下面的语句,此时\TimeFlag:=1;…END PROC6.输入信号指令WaitDO语句格式:WaitDOSignal,Value[\MaxTime][\TimeFlag];其解释参考输入信号指令WaitDI7.输入信号指令InvertDO语句格式:InvertDO Single;将机器人的输出信号反置,1变为0,0变为1;例如:InvertDO do10,;将输出信号do10的数值反转,如果此时do10为1,则通过该指令后就是为0;如果此时do10为0,则通过该指令后为1;8.输入信号指令SetGo语句格式:SetGO[\Sdelay]signal,Value;其中,[\Sdelay]为延迟输出时间,单位是秒;signal是输出信号名称;Value是输出信号的具体数值;举例:SetGO\Sdelay:=0.2,go_Type,10;输出信号go_Type延时0.2秒后,输出数值10;。
ABB机器人
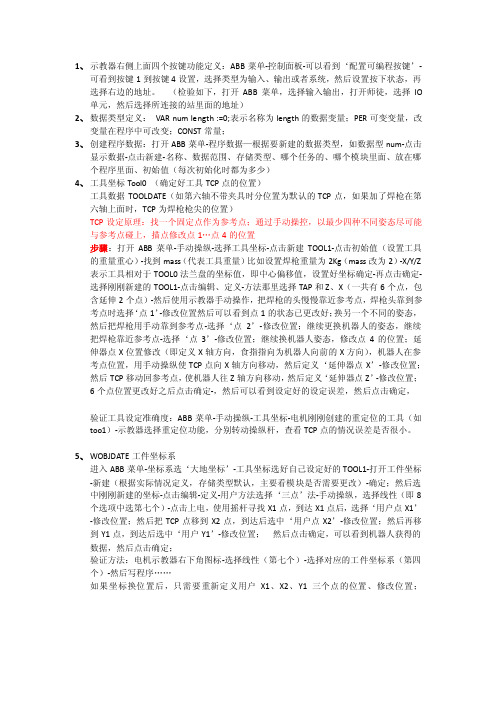
1、示教器右侧上面四个按键功能定义:ABB菜单-控制面板-可以看到‘配置可编程按键’-可看到按键1到按键4设置,选择类型为输入、输出或者系统,然后设置按下状态,再选择右边的地址。
(检验如下,打开ABB菜单,选择输入输出,打开师徒,选择IO 单元,然后选择所连接的站里面的地址)2、数据类型定义:VAR num length :=0;表示名称为length的数据变量;PER可变变量,改变量在程序中可改变;CONST常量;3、创建程序数据:打开ABB菜单-程序数据—根据要新建的数据类型,如数据型num-点击显示数据-点击新建-名称、数据范围、存储类型、哪个任务的、哪个模块里面、放在哪个程序里面、初始值(每次初始化时都为多少)4、工具坐标Tool0 (确定好工具TCP点的位置)工具数据TOOLDATE(如第六轴不带夹具时分位置为默认的TCP点,如果加了焊枪在第六轴上面时,TCP为焊枪枪尖的位置)TCP设定原理:找一个固定点作为参考点;通过手动操控,以最少四种不同姿态尽可能与参考点碰上,描点修改点1…点4的位置步骤:打开ABB菜单-手动操纵-选择工具坐标-点击新建TOOL1-点击初始值(设置工具的重量重心)-找到mass(代表工具重量)比如设置焊枪重量为2Kg(mass改为2)-X/Y/Z 表示工具相对于TOOL0法兰盘的坐标值,即中心偏移值,设置好坐标确定-再点击确定-选择刚刚新建的TOOL1-点击编辑、定义-方法那里选择TAP和Z、X(一共有6个点,包含延伸2个点)-然后使用示教器手动操作,把焊枪的头慢慢靠近参考点,焊枪头靠到参考点时选择‘点1’-修改位置然后可以看到点1的状态已更改好;换另一个不同的姿态,然后把焊枪用手动靠到参考点-选择‘点2’-修改位置;继续更换机器人的姿态,继续把焊枪靠近参考点-选择‘点3’-修改位置;继续换机器人姿态,修改点4的位置;延伸器点X位置修改(即定义X轴方向,食指指向为机器人向前的X方向),机器人在参考点位置,用手动操纵使TCP点向X轴方向移动,然后定义‘延伸器点X’-修改位置;然后TCP移动回参考点,使机器人往Z轴方向移动,然后定义‘延伸器点Z’-修改位置;6个点位置更改好之后点击确定-,然后可以看到设定好的设定误差,然后点击确定,验证工具设定准确度:ABB菜单-手动操纵-工具坐标-电机刚刚创建的重定位的工具(如too1)-示教器选择重定位功能,分别转动操纵杆,查看TCP点的情况误差是否很小。
ABB_system output
定义系统输出
系统输出
• 系统输出是指机器人通过某个数字输出信 号来表示当前某种运行状态。
系统输出:系统输出功能
• Auto On-机器人处在自动模式。 • Cycle On-机器人程序正在运行。 机器人程序正在运行,包括预置程序。 • Emergency Stop-急停。 机器人处在急停状态,拔出急停按钮,重新 复位急停后,信号才复位。 • Execution Error-执行错误。 由于程序错误机器人程序停止执行。 • Motor Off State-机器人电机下电。 信号稳定,不会闪烁。
系统输出:系统输出功能
• Motor On State-机器人电机上电。 信号稳定,不会闪烁。 • Motor Off-机器人电机下电。 如果机器人安全链打开,此信号将闪烁。 • Motor On-机器人电机上电。 如果机器人未同步,此信号将闪烁。 • Motion Supervisin On-机器人碰撞检测功能 被激活。
系统输出:系统输出功能
• Runchain Ok-机器人安全链闭合。 • TCP Speed-机器人运行速度。 此系统输出必须连接至一个模拟量输出信号, 其逻辑量为 2, 代表机器人当前速度为 2000mm/s。
系统输出:定义系统输出
点击ABB主菜单, -> 选择 Control Panel
进入控制面板窗口
系统输出:定义系统输出
• Signal Name-信号名称。 进入选择窗口,选择相应的数字输出信号名称。
系统输出:定义系统输出
• Status-系统状态。 进入选择窗口,选择相应的系统状态,然后点 击OK,定义完毕后需要热启动。
系统输出:系统输出功能
• Motion Supervision Triggered-机器人碰撞 检测功能被触发。 • Power Fail Error-电源故障。 热启动后,机器人程序无法立即再运行,一 般情况下,程序将被重置,从主程序第一行 开始运行,这种状态下,此信号将被输出。 • Path return Region Errorr-机器人无法运行。 机器人运行位置超出工作范围,机器人无法 再次运行,这种状态下,此信号被输出。
ABB机器人系统输入输出功能描述
System Input Action内的功能:1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能;2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止;3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Start at main:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stop at end of cycle:程序在执行完整个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动;11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、Reset Execution Error Signal:复位并输出出错信号;13、Motors On and Start:电机使能并启动程序;14、Stop at end of Instruction:程序会在执行完当前指令后停止;15、System Reset:重启系统;16、Load:从大容量存储装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disable backup:避免启动一次备份;20、Limit Speed:极限速度,降低机器人运动速度;21、PP to Main:PP移至Main,与示教器上调试的选项一致;22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000;23、Write Access:获得写权限;24、Enable Energy Saving:启动节能模式;System Output Status内的功能:1、Motor On:当电机使能为On时输出;2、Motor Off:当电机使能为Off时输出;3、Cycle On:执行机器人程序时输出;4、Emergency Stop:当紧急停止被触发时输出;5、Auto On:自动运行时输出;6、Runchain Ok:安全链链OK;7、TCP Speed:TCP运行速度的模拟信号;8、Execution Error:报警出错时输出;9、Motor On State:电机在启动状态;10、Motor Off State:电机在关闭状态;11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出;12、Motion Supervision Triggered:触发运动监控;13、Motion Supervision On:运动监控启动;14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCP Speed Reference:TCP编程速度的模拟信号;16、Simulated I/O:系统内至少有一个IO被仿真时输出;17、Mechanical Unit Active:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、Mechanical Unit Not Moving:机械单元不在运动中;20、Production Execution Error:生产发生错误;21、Backup in progress:正在进行备份;22、Backup error:备份失败时输出;23、SimMode:仿真模式下输出;24、Limit Speed:由系统输入信号LimitSpeed触发;25、Collision Avoidance:碰撞避免激活时输出,仅限于IRB14000;26、Write Access:获得写权限;27、Energy Saving Blocked:节能模式下时输出;28、CPU Fan Not Running:中央处理器散热风扇没有启动;29、Temperature Warning:温度过高(95度);30、Absolute Accuracy Active:绝对精度激活时输出;31、SMB Bettery Charge Low:SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
ABB机器人系统输入输出功能描述

ABB机器人系统输入输出功能描述输入功能:1.传感器输入:ABB机器人系统可以通过各种传感器实时获取外界环境信息。
例如,温度传感器可以用于监测环境温度,压力传感器可以用于测量液体或气体的压力。
这些传感器能够将环境信息转化为电信号,供机器人系统使用。
2.视觉输入:ABB机器人系统可以通过摄像头或激光扫描仪等设备获取视觉信息。
机器人系统可以使用这些信息来识别和跟踪目标物体,实现精准的位置和姿态控制。
3.指令输入:ABB机器人系统可以通过外部设备或控制台接收用户的指令。
用户可以通过编程或人机界面输入指令,控制机器人进行不同的工作任务。
输出功能:1.执行动作输出:ABB机器人系统可以根据输入的指令或程序执行特定的动作。
例如,机器人系统可以轻松地进行抓取、搬运、装配或焊接等操作,提高生产效率。
2.运动输出:ABB机器人系统可以通过驱动器和电机实现高精度的运动输出。
机器人系统能够根据输入的位置和速度指令,自动控制机械臂的关节运动,实现精确的定位和操作。
3.通信输出:ABB机器人系统可以通过网络或其他通信方式与外部设备进行通信。
机器人系统可以向外部设备发送各类信息,如状态报告、警报通知等,以及接收外部设备发来的信息,实现实时的数据交互。
4.数据输出:ABB机器人系统可以将处理后的数据输出到外部设备或数据库中。
这些数据可以用于后续的数据分析、决策支持和生产管理等。
1.高效性:ABB机器人系统能够快速响应输入,并实时输出相应的动作或数据。
这使得机器人系统能够高效地与外部环境和其他设备进行协调和通信,从而提高工作效率。
2.精确性:ABB机器人系统可以通过传感器和视觉技术等手段实时感知环境,实现精确的位置和动作控制。
这使机器人系统可以准确地完成各类工作任务,并保持高度一致性和重复性。
3.可扩展性:ABB机器人系统的输入输出功能可以根据具体需求进行扩展和定制。
无论是增加更多的传感器、视觉设备,还是与更多的外部设备进行通信,机器人系统都可以很方便地进行集成和升级。
ABB机器人简单操作指南
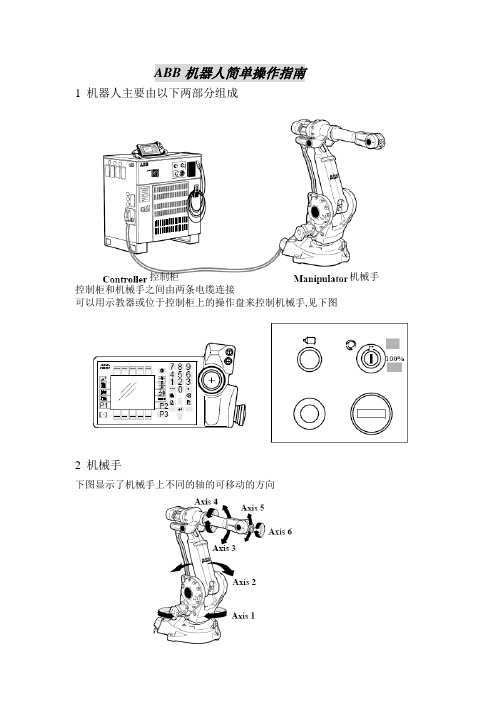
ABB机器人简单操作指南1 机器人主要由以下两部分组成控制柜机械手控制柜和机械手之间由两条电缆连接可以用示教器或位于控制柜上的操作盘来控制机械手,见下图2 机械手下图显示了机械手上不同的轴的可移动的方向3 控制柜下图显示了控制柜的主要部分示教器操作盘主开关驱动磁盘4 操作盘下图描述了操作盘的功能电机开按钮及指示灯操作模式选择开关急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间电机开在电机开状态,机器人的电机被激活,Motors On按钮保持常亮.常亮准备执行程序快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新.电机已经打开.慢速闪烁(1Hz)一个保护停机被激活,电机关闭.工作模式自动(生产模式)在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人工作模式手动减速运行(程序模式)在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人.工作模式手动全速(选择,测试模式)用来在全速情况下运行程序急停当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器显示机械手工作的时间5 示教器见下图控制运行使能设备显示屏控制杆急停按钮手动慢速运行:打开手动慢速运行窗口编程: 打开编程及测试窗口输入/输出:打开输入输出窗口,用来手动操作输入输出信号其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.停止: 停止程序执行对比度: 调节显示屏的对比度菜单键: 按下后显示包含各种命令的菜单功能键: 按下后直接选择各种命令动作单元: 按下后手动慢速运行机器人或其它机械元件动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线动作形式: 轴-轴移动. 1=轴1-3, 2=轴4-6增加: 增加手动慢速运行开/关列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开) 返回/翻页: 按下翻页或返回上级菜单删除: 删除选中的参数确认: 按下输入数据上下键: 上下移动指针左右键: 左右移动指针编程键: 怎样定义这些键,见第10章,系统参数-示教器5.2 窗口操作本节讲述如何进行窗口操作,下面举例说明如何操作输入/输出窗口按下打开输入/输出窗口I/O窗口将被打开,如下图所示.显示的I/O清单将会随定义的信号及I/O板的不一样而不同A: 菜单键B: 窗口名称C: I/O列表名D: I/O列表E: 功能键F: 行数G: 指针当数字输出被选中后,可通过功能键改变其状态,可以通过几种方法在列表中移动指针移动选择上移一行上移箭头下移一行下移箭头至顶行从编辑菜单至第一行至末行从编辑菜单到最后一行翻页下页上页至上页在列表中选定一个指定的行从编辑Edit菜单跳到指定行:键入行号然后按OK窗口有时候被一条双划线分开,当一个输出被选中后,将出现两个功能键A-双划线B-功能键有时可以在不同的窗口之间移动指针,而要在不同窗口之间移动,需按在示教器上有四个窗口键,见下图A-窗口键当按下窗口键后,以前的窗口将隐藏在新激活的窗口下面,被激活的窗口状态和上一次使用该窗口时一样。
ABB机器人系统输入介绍
系统输入• 系统输入是指通过某个数字输入信号来控 制机器人某种运行状态。
• 所有系统输入在自动模式下都能启动;但 部分系统输入在手动模式下将丧失功能。
定义系统输入系统输入可以在远端对机器人进行控制, 机器人可能会运动,注意安全!系统输入功能• MotorOn-机器人电机上电。
• MotorOff-机器人电机下电。
* 当机器人正在运行时,系统先自动停止机 器人运行,再使电机下电;如果此输入信 号值为 1,机器人将无法使电机上电。
• Start-运行机器人程序。
从程序指针当前位置运行机器人程序。
• Start at Main-重新运行机器人程序。
从主程序第一行运行机器人程序,如果机 器人正在运行,此功能无效。
系统输入功能• Stop-停止运行机器人程序。
* 当此输入信号值为 1,机器人将无法运行机 器人程序。
• Stop at the end of Cycle-停止运行机器人程 序循环。
* 当程序运行完主程序最后一行 后,机器人将自动停止运行,此时,输入 信号值为 1,机器人将无法再次运行机器人 程序。
• System Restart-热启动机器人。
系统输入功能• Interrupt-中断。
在系统输入 Argument 项,直接填入服务例 行程序名称,例如:routine 1。
无论程序指 针处在什么位置,机器人直接运行相应的 服务例行程序,运行完成后,程序指针自 动回到原位,如果机器人正在运行,此功 能无效。
• Load and Start-载入程序并运行。
在系统输入 Argument 项,填入所载入程序 路径与名称,例如:flp1:ABB.prg。
如果机 器人正在运行,此功能无效。
系统输入功能• Reset Emergency stop-机器人急停复位。
• Reset Execution Error-复位机器人执行错误。
• Motor On and Start-机器人上电并运行。
ABB机器人常用指令详解
ABB机器人常用指令详解关键信息项:1、指令名称:____________________2、指令功能:____________________3、适用场景:____________________4、参数设置:____________________5、示例代码:____________________11 移动指令111 MoveL 指令MoveL 指令用于线性移动机器人的工具中心点(TCP)到指定的目标位置。
它以直线方式移动,确保路径是一条直线。
指令格式:MoveL ToPoint, Speed, Zone参数说明:ToPoint:目标位置的坐标。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
112 MoveJ 指令MoveJ 指令用于关节运动,机器人以最快的速度将工具中心点移动到目标位置。
指令格式:MoveJ ToPoint, Speed, Zone参数说明:ToPoint:目标位置的关节角度。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
12 输入输出指令121 SetDO 指令SetDO 指令用于设置数字输出信号的值。
指令格式:SetDO Signal, Value参数说明:Signal:要设置的数字输出信号的名称。
Value:设置的值,通常为 0 或 1。
122 WaitDI 指令WaitDI 指令用于等待数字输入信号达到指定的值。
指令格式:WaitDI Signal, Value, Timeout参数说明:Signal:要等待的数字输入信号的名称。
Value:期望的信号值。
Timeout:等待的超时时间,如果在超时时间内未达到指定值,则程序继续执行。
13 逻辑指令131 IF 指令IF 指令用于根据条件执行不同的操作。
指令格式:IF Condition THEN Statements ELSE Statements ENDIF 参数说明:Condition:判断条件。
系统中ABB机器人单元功能分析
• MoveAbsJ p0\NoEOffs, v300, z10, tool0;
//:运动到原点p0;
• WaitTime 0.5;
//:等待0.5秒;
• TEST ruku
//:开始入库(信号组“ruku”的选择);
•
CASE 9: //:如果信号值等于9(9号库),那么执行以下程序;
• p29 := Offs(p9,0,0,100);
• PROC main()
//:程序名称为 main;
• AccSet 20, 20; ;
//:全局加速度最小值为20mm/s^2,最大值为20 mm/s^2
• VelSet 100, 1000; //:全局速度最小值为100mm/s,最大值为1000mm/s
• MoveAbsJ p0\NoEOffs, v300, z10, tool0; //:以300mm/s的速度、转弯半径 为10mm,工件坐标系为tool0,绝对值运动方式,机器人移动到原点位置P0;
• MoveL p10, v200, fine, tool0; //:以直线差补运动方式,速度为200mm/s的运动方式移动到中间点P10;
• MoveAbsJ p0\NoEOffs, v300, z10, tool0; //:以300mm/s的速度、转弯半径为10mm,工件坐标系为tool0,绝对值 运动方式,机器人移动到原点位置P0;
• SetGO ALLOUT, 0;
//:将所有数字输出信号进行复位;
• WHILE TRUE DO
//:判断语句,构成一个死循环;
• IF DI_1=1 THEN
//:如果数字量输入信号DI_1=1,即ABB机器人接收到总控平
台发送的准备对接信号;
ABB机器人使用输入、输出

1、 总则
机器人装有数字模拟信号,在系统参数中这些数字已命名和成形, 从这些信息也可以确定各种系统的动作,如:程序启动。
另外,机器人还可以通过串联通道和广播与计算机、打印机相连接。
1.1、输入/输出窗
按下输入/输出键打开窗口。
该窗口显示适应信号或设施的表,它也提供信号的数据信息,见图
1。
文件编辑视图 命名10特殊
输入、输出
1、总则1.1、输入、输出窗1.2、选择输入、输出表1.3、确定最普通的输入、输出表
2、改变信号数据
2.1、改变数字输出数据
2.2、改变模拟输出信号或者是一组输出信号的数据
3、显示信息
3.1、显示给出信号的信息3.2、显示设施的所有数字信号表3.3、打印输入、输出表3.4、中断的信号
4、输入、输出总线回收
输入/输出
所有的信号
名称 数据类型
4(64)
Di1
1
DI
Di2
0
DI
Grip1
0
DO
Grip2
1
DO
Grip3
1
DO
Grip4
1
DO
Prog no
13
GO
Welderrorຫໍສະໝຸດ 0DO图1——输入/输出窗显示所选择的信号或输入/输出表
窗中显示的数据每隔一秒钟自动修改
1.2、选择I/O表
通过选择View或者AliaslO菜单中的任何一个表,就可以决定你 想要看的信息
视图:
表中的内容
ABB机器人标准指令详解
应用: 当前指令用于软化机器人主机或外轴伺服系 统,软化值范围 0%-100%,软化坡度范 围>=100%,此指令必须与指令 SoftDeact 同时使用,通常不使用于工作位置。
2019/2/5
运动控制指令-SoftAct
实例:
SoftAct 3,20; SoftAct 1,90\Ramp:=150; SoftAct \MechUnit:=orbit1,1,40\Ramp:=120;
实例:
Incr reg1;
等同于
reg1:=reg1+1;
2019/2/5
计数指令-Decr
Decr Name;
MecUnit: 外轴名。
( mecunit )
应用: 使机器人一个外轴失效,例如:当多个外轴 公用一个驱动板时,通过外轴激活指令 DeactUnit 使当前所使用的外轴失效。
2019/2/5
外轴激活指令-DeactUnit
实例:
MoveL p10,v100,fine,tool1; ActUnit track_motion; MoveL p20,v100,z10,tool1; DeactUnit track_motion; ActUnit orbit_a; MoveL p30,v100,z10,tool1;
2019/2/5
运动控制指令-PathResol
实例:
MoveJ p1,v1000,fine,tool1; PathResol 150;
机器人在临界运动状态 ( 重载、高速、路 径变化复杂情况下接近最大工作区域 ), 增加路径控制值,可以避免频繁死机。 外轴以很低的速度与机器人联动,增加路 径控制值,可以避免频繁死机。 机器人进行高频率摆动弧焊时,需要很高 的路径采样时间,需要减小路径控制值。 机器人进行小圆周或小范围复杂运动时, 需要很高精度,需要减小路径控制值。
ABB机器人系统输入输出功能描述
SystemInput Action内的功能:1、MotorsOn:伺服使能On,和控制柜上电机开启是相同的功能;2、MotorsOff:伺服使能Off,机器人控制器会在状态变化前停止;3、Start:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Startatmain:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、QuickStop:快速停止,机器人程序、本体快速停止,和Stop不一样的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样样;7、SoftStop:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stopatendofcycle:程序在执行完满个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Loadandstart:从大容量储藏装置中载入一段RAPID程序尔后启动;11、ResetEmergencystop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、ResetExecutionErrorSignal:复位并输出出错信号;13、MotorsOnandStart:电机使能并启动程序;14、StopatendofInstruction:程序会在执行完当前指令后停止;15、SystemReset:重启系统;16、Load:从大容量储藏装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disablebackup:防备启动一次备份;20、LimitSpeed:极限速度,降低机器人运动速度;21、PPtoMain:PP移至Main,与示教器上调试的选项一致;22、CollisionAviodance:激活碰撞防备,仅适用于IRB14000;23、WriteAccess:获得写权限;24、EnableEnergySaving:启动节能模式;SystemOutputStatus内的功能:1、MotorOn:当电机使能为On时输出;2、MotorOff:当电机使能为Off时输出;3、CycleOn:执行机器人程序时输出;4、EmergencyStop:当紧急停止被触发时输出;5、AutoOn:自动运行时输出;6、RunchainOk:安全链链OK;7、TCPSpeed:TCP运行速度的模拟信号;8、ExecutionError:报警出错时输出;9、MotorOnState:电机在启动状态;10、MotorOffState:电机在关闭状态;11、PowerFairError:程序无法在上电失败后从当前地址连续执行时输出;12、MotionSupervisionTriggered:触发运动监控;13、MotionSupervisionOn:运动监控启动;14、PathreturnRegionError:系统在试一试启动相关机器人程序(但是由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCPSpeedReference:TCP编程速度的模拟信号;16、SimulatedI/O:系统内最少有一个IO被仿真时输出;17、MechanicalUnitActive:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、MechanicalUnitNotMoving :机械单元不在运动中;20、ProductionExecutionError :生产发生错误;21、Backupinprogress:正在进行备份;22、Backuperror:备份失败时输出;23、SimMode:仿真模式下输出;24、LimitSpeed:由系统输入信号LimitSpeed 触发;25、CollisionAvoidance:碰撞防备激活时输出,仅限于IRB14 000;26、WriteAccess:获得写权限;27、EnergySavingBlocked:节能模式下时输出;28、CPUFanNotRunning:中央办理器散热风扇没有启动;29、TemperatureWarning :温度过高(95度);30、AbsoluteAccuracyActive:绝对精度激活时输出;31、SMBBetteryChargeLow :SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
ABB工业机器人编程-第四章

X3端子见表4-3
© ABB April 28, 2019
| Slide 9
4.2. ABB标准IO板卡介绍
4.2.1 ABB标准I/O板 DSQC651
X5 端子编号 1 2 3 4 5
表4-4
使用定义 0V BLACK(黑色) CAN信号线low BLUE(蓝色) 屏蔽线 CAN信号线high WHITE(白色) 24V RED(红色) GND 地址选择公共端 模块ID bit 0 (LSB) 模块ID bit 1 (LSB) 模块ID bit 2 (LSB) 模块ID bit 3 (LSB) 模块ID bit 4 (LSB) 模块ID bit 5 (LSB)
© ABB April 28, 2019
| Slide 2
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
ABB机器人I/O通讯的种类
ABB机器人提供了丰富I/O通讯接口,如ABB的标准通讯,与PLC的现场总线通
讯,还有与PC机的数据通讯,如图,可以轻松地实现与周边设备的通信
ABB的标准I/O板提供的常用信号处理有数字量输入,数字量输出,组输入,组
工业通讯总线接口(选件), 只支持从站功能如: Devicenet、Profibus、 Profinet、EtherNet IP等
Key:使用 何种现场 总线,要 根据需要 进行选配
© ABB April 28, 2019
| Slide 5
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
Key:
表4-8
使用定义 INPUT CH9 INPUT CH10 INPUT CH11 INPUT CH12 INPUT CH13 INPUT CH14 INPUT CH15 INPUT CH16 0V 未使用 地址分配 8 9 10 11 12 13 14 15
工业机器人操作与编程-第十二章输入输出

二 IO板
b.
X5端子见表4-4
模
块
接
口
连
接
说
明
X6端子见表4-5
X5 端子编号 1 2 3 4 5 6 7 8 9 10 11 12
表4-4
使用定义 0V BLACK(黑色) CAN信号线low BLUE(蓝色) 屏蔽线 CAN信号线high WHITE(白色) 24V RED(红色) GND 地址选择公共端 模块ID bit 0 (LSB) 模块ID bit 1 (LSB) 模块ID bit 2 (LSB) 模块ID bit 3 (LSB) 模块ID bit 4 (LSB) 模块ID bit 5 (LSB)
Profibus总线板卡。
Key: 如果使用ABB标准I/O板, 就必须有DeviceNet的总
线
存储插槽及SD 存储卡,标配
2GB.
二 IO板
本节将介绍常用的ABB标准I/O板(具体规格 参数以ABB官方最新公布为准)。
型号 DSQC 651 DSQC 652 DSQC 653 DSQC 355A DSQC 377A
三 IO板配置
定义DSQC651板的总线连接
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通信。
ABB标准I/O板DSQC651是最为常用的模块,下面以创建数字输入信号di、数字输出信号do、组输入 信号gi、组输出信号go和模拟输出信号ao为例做一个详细的讲解。
X6 端子编号
1 2 3 4 5
6
表4-5
使用定义
未使用 未使用 未使用 0V 模拟输出AO1
ABB机器人简单操作指南

ABB机器人简单操作指南1 机器人主要由以下两部分组成控制柜机械手控制柜和机械手之间由两条电缆连接可以用示教器或位于控制柜上的操作盘来控制机械手,见下图2 机械手下图显示了机械手上不同的轴的可移动的方向3 控制柜下图显示了控制柜的主要部分示教器操作盘主开关驱动磁盘4 操作盘下图描述了操作盘的功能电机开按钮及指示灯操作模式选择开关急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间电机开在电机开状态,机器人的电机被激活,Motors On按钮保持常亮。
常亮准备执行程序快速闪烁(4Hz)机器人没有校准或选择计数器没有更新。
电机已经打开.慢速闪烁(1Hz)一个保护停机被激活,电机关闭.工作模式自动(生产模式)在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人工作模式手动减速运行(程序模式)在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人。
工作模式手动全速(选择,测试模式)用来在全速情况下运行程序急停当按下按钮时,无论机器人处于什么状态都立即停止。
要重新启动需将按钮恢复工作时间计数器显示机械手工作的时间5 示教器见下图控制运行使能设备显示屏控制杆急停按钮手动慢速运行:打开手动慢速运行窗口编程:打开编程及测试窗口输入/输出:打开输入输出窗口,用来手动操作输入输出信号其它:打开其它窗口如系统参数,维护,生产及文件管理窗口.停止:停止程序执行对比度: 调节显示屏的对比度菜单键:按下后显示包含各种命令的菜单功能键:按下后直接选择各种命令动作单元:按下后手动慢速运行机器人或其它机械元件动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线动作形式:轴-轴移动。
1=轴1-3, 2=轴4-6增加:增加手动慢速运行开/关列表:按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)返回/翻页:按下翻页或返回上级菜单删除:删除选中的参数确认:按下输入数据上下键:上下移动指针左右键:左右移动指针编程键:怎样定义这些键,见第10章,系统参数-示教器5。
ABB机器人系统输入输出功能描述

S y s t e m I n p u t A c t i o n内的功能:1、MotorsOn:伺服使能On,和控制柜上电机开启是一样的功能;2、MotorsOff:伺服使能Off,机器人控制器会在状态变化前停止;3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Startatmain:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、QuickStop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;7、SoftSto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stopatendofcycle:程序在执行完整个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Loadandstart:从大容量存储装置中载入一段RAPID程序然后启动;11、ResetEmergencystop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、ResetExecutionErrorSignal:复位并输出出错信号;13、MotorsOnandStart:电机使能并启动程序;14、StopatendofInstruction:程序会在执行完当前指令后停止;15、SystemReset:重启系统;16、Load:从大容量存储装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disablebackup:避免启动一次备份;20、LimitSpeed:极限速度,降低机器人运动速度;21、PPtoMain:PP移至Main,与示教器上调试的选项一致;22、CollisionAviodance:激活碰撞避免,仅适用于IRB14000;23、WriteAccess:获得写权限;24、EnableEnergySaving:启动节能模式;SystemOutputStatus内的功能:1、MotorOn:当电机使能为On时输出;2、MotorOff:当电机使能为Off时输出;3、CycleOn:执行机器人程序时输出;4、EmergencyStop:当紧急停止被触发时输出;5、AutoOn:自动运行时输出;6、RunchainOk:安全链链OK;7、TCPSpeed:TCP运行速度的模拟信号;8、ExecutionError:报警出错时输出;9、MotorOnState:电机在启动状态;10、MotorOffState:电机在关闭状态;11、PowerFairError:程序无法在上电失败后从当前位置继续执行时输出;12、MotionSupervisionTriggered:触发运动监控;13、MotionSupervisionOn:运动监控启动;14、PathreturnRegionError:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCPSpeedReference:TCP编程速度的模拟信号;16、SimulatedI/O:系统内至少有一个IO被仿真时输出;17、MechanicalUnitActive:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、MechanicalUnitNotMoving:机械单元不在运动中;20、ProductionExecutionError:生产发生错误;21、Backupinprogress:正在进行备份;22、Backuperror:备份失败时输出;23、SimMode:仿真模式下输出;24、LimitSpeed:由系统输入信号LimitSpeed触发;25、CollisionAvoidance:碰撞避免激活时输出,仅限于IRB14000;26、WriteAccess:获得写权限;27、EnergySavingBlocked:节能模式下时输出;28、CPUFanNotRunning:中央处理器散热风扇没有启动;29、TemperatureWarning:温度过高(95度);30、AbsoluteAccuracyActive:绝对精度激活时输出;31、SMBBetteryChargeLow:SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
System Input Action 内的功能:
1 、Motors On :伺服使能Or,和控制柜上电机开启是一样的功能;
2、Motors Off :伺服使能Off ,机器人控制器会在状态变化前停止;
3、Star t :启动,机器人程序启动,和示教器上启动按钮功能一致;
4、Start at main :在主程序启动,机器人从主程序从头开始并启动;
5、Stop :停止,机器人程序停止,和示教器上停止按钮功能一致;
6、Quick Stop :快速停止,机器人程序、本体快速停止,和Stop 不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;
7、Soft Stop:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;
8、Stop at end of cycle :程序在执行完整个循环时停止;
9、Interrupt :中断,触发机器人中断程序;
10、Load and start :从大容量存储装置中载入一段RAPID程序然后启动;
11、Reset Emergency stop :复位紧急停止,仅在硬件急停没在按下的情况下有效;
12、Reset Execution Error Signal :复位并输出出错信号;
13、Motors On and Start :电机使能并启动程序;
14、Stop at end of Instruction :程序会在执行完当前指令后停止;
15、System Reset :重启系统;
16、Load:从大容量存储装置中载入一段RAPID程序;
17、Backup:备份,把当前系统内数据、参数备份;
18、SimMode模拟模式;
19、Disable backup :避免启动一次备份;
20、Limit Speed :极限速度,降低机器人运动速度;
21、PP to Ma in : PP移至Mai n,与示教器上调试的选项一致;
22、Collision Aviodance :激活碰撞避免,仅适用于IRB14000;
23、Write Access :获得写权限;
24、Enable Energy Saving :启动节能模式;
System Output Status 内的功能:
1、Motor On:当电机使能为On时输出;
2、Motor Off :当电机使能为Off 时输出;
3、Cycle On :执行机器人程序时输出;
4、Emergency Stop :当紧急停止被触发时输出;
5、Auto On:自动运行时输出;
6、Run chain Ok :安全链链OK
7、TCP Speed TCP运行速度的模拟信号;
8、Execution Error :报警出错时输出;
9、Motor On State :电机在启动状态;
10、Motor Off State :电机在关闭状态;
11、Power Fair Error :程序无法在上电失败后从当前位置继续执行时输出;
12、Motion Supervision Triggered :触发运动监控;
13、Motion Supervision On :运动监控启动;
14、Path return Region Error :系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;
15、T CP Speed Referenee : TCP编程速度的模拟信号;
16、S imulated I/O :系统内至少有一个IO 被仿真时输出;
17、M eehanieal Unit Aetive :机械单元启动;
18、T askExeeution :执行已配置任务时输出;
19、M eehanieal Unit Not Moving :机械单元不在运动中;
20、P roduetion Exeeution Error :生产发生错误;
21 、Baekup in progress :正在进行备份;
22、B aekup error :备份失败时输出;
23、S imMode仿真模式下输出;
24、L imit Speed :由系统输入信号LimitSpeed 触发;
25、C ollision Avoidanee :碰撞避免激活时输出,仅限于IRB14000;
26、W rite Aeeess :获得写权限;
27、E nergy Saving Bloeked :节能模式下时输出;
28、C PU Fan Not Running :中央处理器散热风扇没有启动;
29、T emperature Warning :温度过高(95 度);
30、A bsolute Aeeuraey Aetive :绝对精度激活时输出;
31、SMB Bettery Charge Low : SMB电池电量过低;系统输入:系统输入的意义为当输
入点为1 时对应的功能动作。
系统输出:系统输出的意义为当该动作执行时,输出点为 1 。
选择完信号名称、动作后,还要选择扫描类型,有循环扫描Continuous 、有单周期扫描Cyele 。
根据实际使用选择。