上海申克动平衡CAB690调电压值
CAB590平衡机培训
H40U 硬支撑平衡机操作教案1、打开操作柜CAB590左下方的电源开关,这是机器进行自检,自检项目分别为有四项,分四屏进行自检。
其中一屏为自检项目“1”,为PROM 自检,若显示屏顺序显示6个0表示所检验的3片PROM 工作正常,反之则PROM 出故障。
自检项目“2”,为RAM 自检,若显示屏顺序显示8个0表示所检验的RAM 工作正常,反之则RAM 出故障。
自检项目“3”,为数码显示管的自检,所有的数码显示段位将依次点亮,最后所有的显示管都将点亮。
自检项目“4”,硬件测试,其测试结果显示如下:显示屏左上方4.85(近似值),显示屏右上方4.85(近似值),按↑键可退出自检程序。
(一般不要求人工退出自检)2、CAB590转速设置是用挂挡的方法设置转速。
可选转速分别为一挡225RPM ;二档420RPM ;三档720RPM ;四档1140RPM 。
警告:转速的选择必须要在开动机器前进行。
3、不平衡量的测量显示器将显示存储单元内容:A 、B 、C 的数值;R1、R2的数值;校正的方法:(加重) 或(去重),文件号(若是从内存文件中调用的)。
转子数据输入:1.1输入数据,按1.2符号 闪烁1.2.1输入支撑方式(0……6)1.2.2按 键1.3 A 闪烁,输入A 值。
(A 、B 、C 值可采用任意量纲,但重要的是这三个值的量纲要相同。
1.3.1 按 键1.4 B 闪烁,输入B 值。
同理输入C 值。
继续按 R 闪烁时输入一个平面校正和 在R 的右边,其中前一个表示通过加重方式校正不平衡转子,后一个表示通过去1.5同理输入R2的值。
1.6按键1.7按或键,显示第2屏内容。
2.输入数据和符号2.1符号在顶部的中央闪烁。
2.2转速输入:可预置,也可现输。
预置时当实际转速达到预置转速的+-5%范围后,键可将测量值存入内存作为预置转速。
2.3按键,左边T闪烁,输入公差值(也可不输入),继续按键,输入通道“灵➢按前行键,可跳过输入,在测量运转中自动调节,并可在最高灵敏度条件下测量。
申克动平衡机AJR调试与动平衡标定
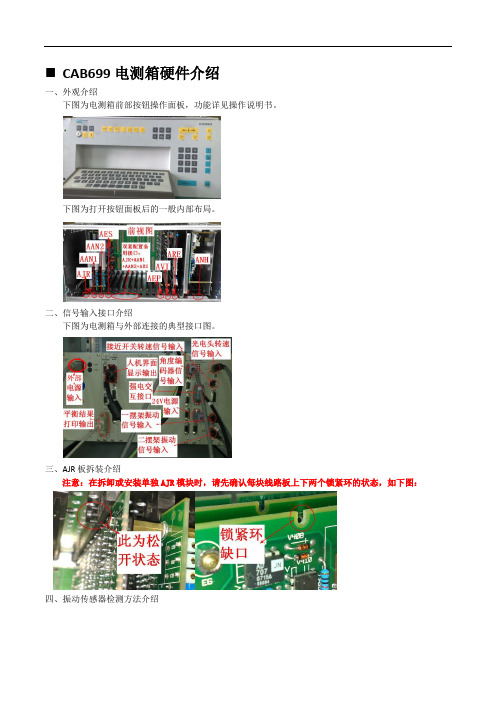
CAB699电测箱硬件介绍一、外观介绍下图为电测箱前部按钮操作面板,功能详见操作说明书。
下图为打开按钮面板后的一般内部布局。
二、信号输入接口介绍下图为电测箱与外部连接的典型接口图。
三、AJR板拆装介绍注意:在拆卸或安装单独AJR模块时,请先确认每块线路板上下两个锁紧环的状态,如下图:四、振动传感器检测方法介绍如下图,旋转掉机柜后面的振动传感器接头,用万用表测试第二、五个接头的电阻值,正常情况下其值应该为33KΩ,如果检测为断路则说明1号机的传感器出现问题,其中传感器线上的数字1和数字2分别对应动平衡机的左边和右边传感器。
五、ANH电源模块检测介绍下图为ANH模块外观图,若H1~H5灯如下图般闪亮,无虚亮或不亮的情况则电源模块工作正常。
若H1~H5灯存在不亮或虚亮的情况,首先要检查的是保险丝完好情况,如下图:图示箭头方向为松开方向,用一字螺丝刀稍微顶紧逆时针松开,用手拔出如下图:依次检查两个保险丝,若有熔断情况则更换为相同规格熔断丝(标准附件箱中配5个备用熔断丝)。
当显示器黑屏无显示时,可能由于电压模块输出电压过低,可通过调整R6和R7来实现,R6调整+5V 电压,正常值为5.05V,R7调整-15V。
AJR板检测与调试开机自检后如果出现下图所示,则进行AJR调试(如果能通过按键“继续”向下进行也可不进行AJR 调试)。
进入测量界面后,依次按下SF、T键,进入硬件检测程序。
如下图:选择5,进入AJR检测程序,如下图,对于本机有两个AJR板分别对应机器1和机器2.对于AJR1和AJR2检测方式相同。
选择5测试零点时,进入以下界面:调整下图中的四个电位器,使h1、v1、h2、v2数值均接近于零。
若有数值超出3%,则电测箱报错平面坏,若通过调整电位器的方法仍无法调整到3%以内,则必须要更换相应AAN测量板。
返回到AJR测试模块后选择6进入模拟测试时,进入以下界面:输入99,按下确定,测试次数输入10,按确定进入以下界面:待测试结束后,结果显示如图则不需要进行AJR调节:如果结果显示如下图则需要调节到如上图所示:按下确定退出后,选择量值最大的通道10进入,调整AJR 板上的电位器,如图: 注意:调节模拟量电位器下面两个电位器不要擅自调节。
申克动平衡原理8
Effective correction Drilling, radial
有效的校正,半径 方向钻削
t1
t
This curve can be calculated by software (option for measuring systems) or taken from a table
r r1
不 平 衡 量 , 偏 心 , 离 心 力 , 振 动 … … unbalance, C.o.G., eccentricity, centrifugal force, vektor ...
Fundamentals - Part 2
公 差
在 刚 性 转 子 上 的 轴 向 不 平 衡 量 的 分 配 , 不 平 衡 量 的 类 型 … … axial unbalance distribution on rigid rotors, types of unbalances ...
Seminar-Chapter-Subject-Page 11-07-01-01
Balancing and Diagnostic Systems
Unbalance Correction 不平衡量的校正 principle: adding mass 原理:加重
adding mass
加重
Selection on measuring system
平衡的目的: 使轴线与质心线重合
Usual situation; unbalanced: Mass-axis 质心轴
通常位置;不平衡的
Shaft-axis 轴中心线
Hatto Schneider, 19.2.98, VB-09-Oct-2000
Seminar-Chapter-Subject-Page 11-07-00-01
基于DC-Master控制的申克转子称调试及操作手册
基于DC-Master控制的申克转子称调试及操作手册编写者:王寻英编写日期:2009年5月5日目录1. 背景 (3)1.1 编写目的 (3)1.2 内容编排 (3)1.3 术语定义 (3)2. Multicor K50系列转子称硬件组态 (4)2.1 设备组件 (4)2.2 电气组成及卡件配置 (5)2.3 转子称计量原理 (7)2.4 转子称工作流程 (8)3.EasyServer软件的使用说明 (8)3.1 菜单功能介绍 (8)3.2 连接与通讯 (12)4. DC-Master的基本操作 (13)4. 1 Scale Control 界面简介 (13)4.2 Menu菜单界面简介 (14)5. 转子称的静态标定 (14)5.1 压缩空气压力调节 (15)5.2 电机及变频器参数设置 (15)5.3 EasyServe软件参数设置与组态 (15)5.4 去煤粉仓皮重 (16)5.5 去MulitcorK50皮重和空气皮重 (18)5.6 仓的非线性校正(砝码标定) (19)6. 转子称的在线标定 (19)7.常见故障排查 (20)附录:K50计量系统 (21)1. 背景1.1 编写目的Schenck转子称是水泥厂用于煤粉计量的关键设备,其调试过程也是全厂仪表调试中最复杂的。
Schenck公司所提供的电气资料没有提供调试说明文档,并且所有皆为英文,给我们的调试及操作带来不便,因此我结合Schenck提供的电气资料、徐洪安先生的Schenck 转子称调试手册以及同Schenck调试工程师Christian.Sporrer先生在赞比亚项目转子称调试过程中遇到的实际问题,撰写该操作手册,以方便今后现场人员对于转子称的调试及操作工作。
由于本手册是基于赞比亚项目的Schenck Multicor K50系列,且由一个煤粉仓供应两台转子称,硬件配置以及软件参数设置都是基于MulticorK50,因此当调试及操作其它系列的转子称时,会稍有不同,此时应以Sckenck提供的资料为准。
动平衡 CAB850C说明书-e+c
CAB850CContents1. Splash (2)2. Printing 打印 (3)3. Unbalance display for unbalance measuring station不平衡测量工位的不平衡量显示: (4)4. Unbalance calibration of test shaft 试验轴的不平衡标定 (6)5. Test of unbalance calibration 不平衡量标定测试: (7)6. Unbalance measuring station drive adjustment 不平衡测量工位驱动调整 (8)7. Unbalance test I/O 不平衡量测试输入/输出 (12)8. Display the correction axes 显示校正轴 (13)9. Entry of axis position 轴位置输入 (15)10. Display the correction description 显示校正描述 (17)11. Test dialogue for a correction station 校正工位测试对话框 (22)12. Correction single-steps 单步校正 (26)13. Geometry display 几何显示 (28)14. Calibration of the geometry station 几何测量工位的标定 (29)15. Re-equip 重新设置 (33)16. Password (Service) 密码(服务) (37)17. Overview info 预览信息 (40)18. Backup 备份 (41)19. Emergency diskette 应急磁盘备份 (43)20. Configuration of the Type data 型号数据的配置 (44)21. Configuration of machine data 机器数据的配置 (46)22. Statistics 统计 (48)23. Statistics characteristic data 统计特性数据 (49)24. Class statistics 分组统计 (50)25. Mean value statistics 平均值统计 (51)26. Scatter-circle statistics 分散圆统计 (52)27. Standard deviation statistics 标准偏差统计 (53)28. CDM (54)29. Unbalance single step movement 不平衡单步动作 (56)1. SplashThe general layout of the user interface can be seen in the above graphic.用户界面总体布局图可以参见上述图解。
CAB-580F传动轴平衡机电测箱操作说明书
CAB-580F型传动轴平衡机专用电测箱操作说明书中华人民共和国上海申聚机械有限公司警告:在使用本系统前应仔细阅读和理解说明书的信息,以便正确操作使用,并避免对系统及人身的损害。
一、须知1.1 一般使用条件环境温度-10~+40℃环境湿度≤85%电源电压220V AC±10%连续工作方式无强腐蚀性气体或严重粉尘1.2 主要技术指标最小检测量参见平衡机说明书测量时间3到60秒自动调整灵敏度1.3 外部接线使用前,应检查装好电测箱后面板接插件:a) 传感器1,2接插线b) 测速信号接插线c) 电源输入与输出插座接插线d) 检查电源线是否接好并接通电源e) 配备性能良好的安全接地线.接地电阻<0.5Ω1.4 设备贮存及运输1.4.1应贮存在防雨、通风、干燥的场地。
二、动平衡测量系统简介现代工业中为了减少旋转机械的振动,提高工作转速,延长工件使用寿命,必须消除旋转工件的动不平衡。
由于采用了微机测量系统,才能使平衡机发展来了一个飞跃,采用微机系统后,能适应不同的旋转工件,品种、形状、重量,能进行人机对话进行智能化操作。
解决了一般平衡机效率低,操作复杂等通病。
适应现代工业的管理和发展。
2.1.微机控制特点a) 实时性微机操作系统能迅速采样、处理、分检、工件的不平衡状况,测量时间可以设置。
b)简单的人机交互操作,迅速调用相应控制程序,框图,实现动态分析,贮存结果。
c)易操作性直观界面:人机交互采用面板式窗口操作,具有仿常规数字仪表及模似矢量表的二维图形结构。
d) 高效率由于采用了工业控制低功耗微机,并配置了自己开发的专用软件和电子贮存器,因此能快速、方便、进行测量。
采用人机交互窗口操作和数字与模似显示能迅速确定不平衡点的所在位置和数值,使操作者能快速完成作业。
由于用了电子贮存器,能贮存10000个转子的平衡数据,并能打印结果。
预先可配置标100种转子的原始数据,可方便使用,提高效率。
e)易管理由于本机能贮存大量的原始数据,因此管理者能迅速方便地调阅操作者的工作质量,工作效率,适应全面品质控制。
动平衡技术要求规范及操作指南设计
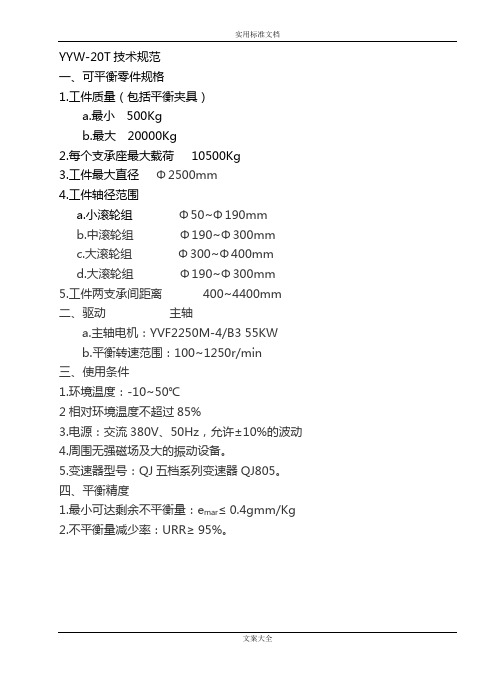
实用标准文档YYW-20T技术规范一、可平衡零件规格1.工件质量(包括平衡夹具)a.最小500Kgb.最大20000Kg2.每个支承座最大载荷10500Kg3.工件最大直径Φ2500mm4.工件轴径范围a.小滚轮组Φ50~Φ190mmb.中滚轮组Φ190~Φ300mmc.大滚轮组Φ300~Φ400mmd.大滚轮组Φ190~Φ300mm5.工件两支承间距离400~4400mm二、驱动主轴a.主轴电机:YVF2250M-4/B3 55KWb.平衡转速范围:100~1250r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V、50Hz,允许±10%的波动4.周围无强磁场及大的振动设备。
5.变速器型号:QJ五档系列变速器QJ805。
四、平衡精度1.最小可达剩余不平衡量:e mar≤0.4gmm/Kg2.不平衡量减少率:URR≥95%。
YYH-2000技术规范一、可平衡零件规格1.工件质量(包括平衡夹具)a.最小500Kgb.最大2000Kg2.每个支承座最大载荷1050Kg3.工件最大直径Φ1600mm4.工件轴径范围a.小滚轮组Φ15~Φ190mmb.中滚轮组Φ190~Φ290mm5.工件两支承间距离280~3100mm(圈带驱动)140~2250 mm(联轴节驱动)二、驱动a.联轴节驱动电机:YVF2180L-4/B3 22KWb.圈带驱动电机:YVF2180L-4/B5 22KWc.平衡转速范围:100~1200r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V 、50Hz ,允许±10%的波动4.周围无强磁场及大的振动设备。
四、平衡精度1.最小可达剩余不平衡量:e mar ≤0.2gmm/Kg2.不平衡量减少率:URR ≥95%。
操作指南1 安装 参照系统接线图(图电传感器插头和电源插头插好,一般情况下不需要变动。
申克煤粉秤安装调试指南(CBMI)
文档内容Schenck转子秤调试手册
编写者/日期徐洪安/2005/4/15
修改者/日期
Schenck转子秤调试手册
1背景
1.1
Schenck
复杂的。Schenck
调试工程
以方便
系列,
使用建议:建议作为CBMI
1.2
程,然后详细介绍了Disocont各卡件的硬件配置,EasyServe软件的使用,和软硬件的参数设置和组态。最后逐项给出了转子秤各项标定的详细操作步骤以及注意事项。手册中配有大量的图片以便于大家快速理解掌握。
Star Feeder:
Optional Dryer:
Coriolis:
Conveying Air:
Compress Air:
Mode OP:
Mode Normal:
V olume Mode:
2 Multicor K80系列转子秤设备组件
2.1设备组件
Mulitcor-K80转子秤煤粉计量系统外形如图1所示,
4.(Air System气路系统,由Conveying Air(输送空气系统,Compressed Air
System(压缩空气系统,Option dryer(干燥器,Pressure Controller Box(压缩空气控制箱组成。如图5.a ,图5.b ,图5.c所示。
图2星形给料器
图3搅拌器
640/800/1000 for Pulverized Coal Feeding Operating Manual, Schenck
5.Horizontal Rotary Feeder with Extraction Agitator Types MULTICELL
SGT5-4000F型燃气轮机转子高速动平衡工艺
SGT5-4000F型燃气轮机转子高速动平衡工艺张国永1,2, 陈富新2,许雄国2, 李道云2,张岳飞1,2(1.上海交通大学机械与动力工程学院,上海200240;2.上海电气电站设备有限公司上海汽轮机厂,上海200240)摘要:介绍了SGT5-4000F型燃气轮机转子特点,根据上海汽轮机厂动平衡设备特点及挠性转子动平衡原理,提出合理的SGT5-4000F型燃气轮机转子高速动平衡工艺方案,并以实例进行阐述。
关键词:转子,动平衡工艺,燃气轮机中图分类号:文献标识码:文章编号:High Speed Balance Process of SGT5-4000FGas Turbine RotorZHANG Guo-yong1,2, CHEN Fu-xin2, XU Xiong-guo2, LI Dao-yun2, ZHANG Yue-fei1,2(1. School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200240, China;2. Shanghai Electric Power Generation Equipment Co., Ltd. Shanghai Turbine Plant, Shanghai 200240, China)Abstract: The features of SGT5-4000F gas turbine rotor are introduced. According to the features of the balance facilities in Shanghai Turbine Plant and the balance theories of flexible rotor,a proper high speed balance process for the SGT5-4000F gas turbine rotor is proposed.The process is described with actual data.Key words: Rotor, Balance Process, Gas Turbine收稿日期:作者简介:张国永(1980-),男,工程师,2003年毕业于重庆大学机械设计制造及其自动化专业,现攻读上海交通大学机械工程工程硕士,目前在上海汽轮机厂工艺处从事总装工艺开发工作。
艾默生管道工具(上海) 690便携式动力驱动器说明书

操作手册艾默生管道工具(上海)有限公司目录安全须知 (2)描述、规格及标准配置描述 (3)规格 (3)附件 (3)操作说明 (3)维修说明 (4)终身质保条款........................................................................................................................封底安全须知警告!请仔细阅读所有的安全注意事项和安全指导。
如果不遵从这些安全指导可能会导致电击、火灾或者严重人身伤害。
请妥善保存本安全注意事项和安全指导。
工作场所安全注意事项1. 保持工作场所干净整洁和照明充分。
混乱和昏暗的环境容易引起安全事故的发生。
2. 不要在易燃易爆等的危险环境下操作电动工具,例如易燃易爆的液体、气体或粉尘环境下。
电动工具可能会产生火花,会引燃这些粉尘或气体。
3. 在操作机器时,使无关人员(包括小孩、旁观者、非工作人员等)远离工作现场。
不相关的干扰会影响你对工具的正确使用。
用电安全1. 电动工具插头应该和插座相匹配。
任何时候都不要改变插头。
不要连接插有接地的电动工具的插头的适配器一起使用。
不改变插头和与插座相匹配将会减少电击事故的发生。
2. 避免身体与接地物体的表面接触,如金属管道、散热器、金属柜体和制冷设备。
如果身体和接地物体接触,会增加电击危险的机率。
3. 不要把电动工具防置于雨中或潮湿的环境下。
水进入电动工具将增加电击危险的发生。
4. 不要损坏电源线。
不要把电源线用来拖、拽电动工具。
使电源线远离热、油、尖锐边缘或移动物体。
电源线损坏或卷入其它物体中都会增加电击危险。
5. 当在室外使用电动工具时,请使用适合在室外工作的接线板,例如标记有“W-A”或“W”符号的接线板。
6. 仅限于使用有三股线的三头插头和三孔插座。
如果使用其他类型的,那么有可能没有接地而增加了电击的危险。
7. 请参照下表选择电线,如果尺寸不对,那么会引起较大的压降和电力损失。
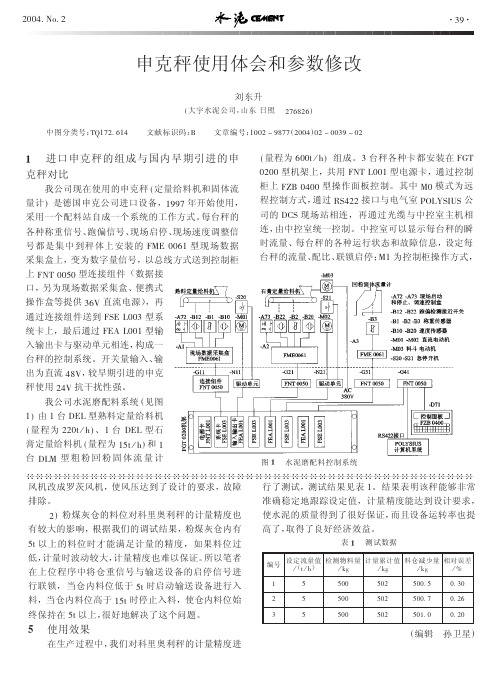
申克秤使用体会和参数修改
" 额 定 速 度 @ -",$ "# 由 "$ "!= "; 9 < 改 为
"$ "+>; 9 <
# 额 定 载 荷 @ -"+$ " 由 ,#+$ >?/0 9 ; 自 动 改 为 ,*#$ +!/0 9 ;(仪表自身功能)
$安全操作极限@ -,"$ "* 由 ,* """$ "/0 9 : 改为
与熟料定量给料机同步启停。进入组态修改模式,把
2,"$ "+ 3 C5DDD 改为 2,"$ "+ 3 C5 E5,C5F,这样输
入输出卡的第 F 输出点被激活,接入一个交流 !!"G
中间继电器,由它的触点与外部助磨剂泵电路联锁即
可。
H 编辑 孙卫星1
! 申克秤参数修改及使用体会
, 1 定量给料机使用 ! 年以后需要更换皮带,原 来皮带内部夹有三角形金属片,通过接近开关检测的 脉冲宽度来判断皮带跑偏情况,更换的皮带没有金属 片。定量给料机启动后检测不到皮带跑偏信号,会自 动保护停车。
由于皮带上安装有张紧和调偏一体化的托辊,基 本可以保证皮带正常运行,于是进入组态修改模式, 把 给 料 机 跑 偏 检 测 由 原 来 2"+$ ", 3 4% 5 改 为 2"+$ ", 3 %6 7,,取消跑偏检测功能。在调整皮带机 尾部辊筒校正跑偏时,要注意张紧和调偏一体化托辊 上边与秤体两侧的棱形观察孔中心线一致,这样可以 保证张紧力一定,减小对秤零点的影响,调偏托辊能 更好发挥作用。如此处理后,皮带秤运行正常。
上银伺服电机调试说明书

沒有功能
伺服激磁(Servo ON) 左極限輸入
右極限輸入
馬達過溫訊號輸入,通常設定在I5, 接馬達過溫訊號線
設定目前位置為驅動器座標原點,並開啟精度補償表 重置驅動器,相當於重開電源 當使用內建歸原點時,要找原點開關來做歸原點時,原 點開關的輸入
Clear Error
清除錯誤(Alarm)
Zero Speed Clamp
第二十九页,课件共有36页
接线CN6 腳位功能說明
第三十页,课件共有36页
外部接线說明
市电单相 220V电压 ,对应接 L1,L2以及 地线
L1C与L1并联 L2C与L2并联
CN2接口,用于带刹车电机,接 线规范:
1. 24V正极联入+24V孔,负
极联RTN. 2. 动力线之B+,B-对应B+,B-
功能說明
沒有功能 內建煞車邏輯輸出,預設在O4 當驅動器Servo ON且無任何錯誤時輸出 與Servo Ready呈反向 當命令接收完畢且追隨誤差低於Target radius時輸出 當電機在移動時輸出 內建歸原點程序完成 AC伺服馬達串列編碼器index輸出 當速度低於vel_stop輸出 當有錯誤產生時輸出,相當於Alarm
選擇方向觸發 相對移動或吋動
性能測試-測試運轉
Step 1選擇單位 ,
建議先選mm
Step 3 寸動測試 選擇Jog
Step 2 運動參數設定, 一開始請使用較慢速度
可如下設定
Step 4 慢慢吋動到負極限,看運動 是否平順,若有抖動或異音 降低Primary CG,
第二十一页,课件共有36页
性能測試-測試運轉
第三十六页,课件共有36页
Lightening語言切換
SCHENCK-HSMAK单工位自动曲轴平衡机技术文件

Schenck Shanghai MachineryCorp. Ltd.产品技术文件制造商介绍:自1907年,世界上第一台工业动平衡机诞生于SCHENCK公司以来,平衡机技术已经历经了100多年的历史。
SCHENCK平衡机在世界平衡机行业享有最高盛誉。
SCHENCK公司不断发展的历史,就是世界平衡机技术不断改进和完善的历史。
平衡机从最初的软支承结构演变为硬支承结构,平衡机从最基本的检测设备发展为现代生产中必备的重要生产设备。
平衡机已经广泛应用于现代工业中的各行各业,涉及航空航天,汽车行业,电子电器,通用工业,纺织行业,船舶铁路,能源电力等,为实现产品更高平衡品质提供了有力保障。
HS4UMAK单工位自动曲轴平衡机Schenck Shanghai MachineryCorp. Ltd.HS4MAK设备技术描述综合描述曲轴自动平衡机HS4UMAK是德国申克公司曲轴平衡机系列中先进的全自动单工位机型,其主要部件都采用德国申克公司最新技术,整台产品从平衡、钻削去重校正、排屑及复测都以自动方式在单工位上运行,具有生产工具节拍短,效率高的特点,是船用曲轴平衡机的首选。
HS4UMAK采用德国申克原装进口的CAB 920测量控制系统,系统集测量控制运算等功能于一体,由测量控单元和工业PC组成前后台系统,显示采用彩色液晶触模屏,界面清晰直观,功能强大,是当今世界上自动平衡机场先进的测量控制系统。
微机测量系统 C A B 920(德国申克原装进口)1、应用:用于单面或多面平衡机上高标准平衡任务的测量系统,测量数据完全经过数字化处理,带有校正系统测量单元。
Schenck Shanghai MachineryCorp. Ltd.特点:具体特点●易于人机交互的触摸屏控制●简化转子数据输入和结果的简单模式●前置USB 2.0接口用于数据快速传输到存储介质●PC模块化、友好的系统设计,包含电子模块和工控机●数字处理测量数值保证高精度●网络功能和可选的远程服务●用于特殊平衡用途的大量软件模块技术参数:标准转速范围(可选40rpm到100,000rpm)100- 5 000 rpm最小可达残余不平衡量(Umar):依照ISO 2953对于每个平面每公斤转子重量 - 带传动- 万向节传动不低于依照测量转速的数值解析度随n增加测量转速不平衡减小率0,1 gmm/kg0,5 gmm/kg (根据具体机器情况) gmm1000 rpm21000⎪⎭⎫⎝⎛n最大至up to 95 %整体不平和测量范围平均测量时间(不包括启制动时间)速度测量数字式,4位,精确到测量数值+ 0.1 %位,刷新时间约1分钟,存储显示大约1 : 2 000 000 可从0.5秒开始调整Schenck Shanghai MachineryCorp. Ltd.电脑/测量模块I PC 工控机1GB内存,2 x 1 GB闪存集成Windows XP触摸屏显示,15",1024x768分辨率(SVGA),200 cd2 COM口,串口1 计算机界面,以太网1 用于第二视频显示单元接口(DVI)1 用于信号交互传输到控制系统的机器接口2 相位传感器2 振动力传感器(可选配至4个)1 前置USB 2.0接口2 后置USB 2.0 接口(1个接打印机)1无线通讯用连接外部USB调制解调器接口(可选)电源连接: 86 – 260 V, 50/60 Hz(自动调整)工作环境温度: 0° C 到 45° C相对湿度:< 90 %保护等级前部IP 65外形尺寸: 显示器面板:19”支架单元,9 高度单元重量:大约20kgSchenck Shanghai MachineryCorp. Ltd.重要详细资料1.操作▪简单的模式把平衡机控制简化为两侧对话框▪在交互式的直接输入窗口帮助下输入数值和文本到对话框内▪频繁使用的功能能被直接调用,来更快更完美地平衡转子▪全部的测量运作都存储在数据库中,因此,能够检查全部的运行步骤2.不平衡或不平衡校正的显示▪2个校正平面同时以大而易读的数字和极坐标方式显示数值和角度▪平衡公差到达时高亮颜色显示3. 设置测量系统▪在设置时,清晰明了的转子支撑方式的显示在正确输入转子几何参数的过程中帮助和指导用户▪为了存储和快速调用,频繁使用的转子类型设置参数可以存储在PC上,转子参数文件数量不受限制4. 基本功能输入每个校正或控制平面的期望公差,或者根据DIN ISO 1940计算为每个转子输入一个文字符号混合的特定标识输入设置数据调用之前的不平衡量操作者姓名从0度到第一次不平衡校正位置的偏差5. 测量▪根据型号幅度自动调整灵敏度▪达到要求速度范围自动开始测量▪预选择测量时间和计算平均数可以手动或自动锁定不平衡读数▪比较不平衡测量值和指定的公差,显示一个反映与指定公差关系的参数(x倍公差);当达到指定公差时,颜色改变并出现适当信息6. 报告扩展功能用于根据用户的要求修改测量报告Schenck Shanghai MachineryCorp. Ltd.▪记录当前数据的能力,如- 转子数据- 所有转子数据列表- 测量数据(平衡报告)-定标数据整合平衡后转子的图形元素或照片▪以PDF格式记录报告7. 特点▪角分度(需要增量式编码器)▪为进一步处理,以标准格式存储测量的不平衡值(*.csv = ),如用Excel处理或者Win SPC(申克公司的统计程序)▪系统中有可用的简单程序(口袋计算机,记事本)▪在网络中处理数据▪密码系统,保护数据不被未授权者修改▪多种功能用于测量系统的自动自检▪通过闪存,就可以非常简单地恢复传输软件供应范围1 测量系统CAB 920,包括集成的测量和显示模块和图形化彩色触摸显示屏1 测量系统支撑底座1 一套线缆1 相位发生器1 一套技术文档系统语言可用的系统语言:德语,英语,法语。
申克RV1-3平衡机操作步骤
申克RV1-3平衡机操作步骤申克RV1-3平衡机适用于各种环境下的电气保护和控制。
适用于电力公司工厂车间电弧焊,熔断器断路器,母线保护等场合。
RV1-3多功能智能平衡机利用计算机控制,可自动检测出电流电压,并自动断开电源总开关(或三相),调节电流大小,从而自动控制设备运行并提供电流通过。
是生产电弧的好设备之一。
由于它可以自动地检测电压和电阻的变化,也可以自动检测电流来调整电气电压和相应的电压开关的执行机构是由一个小型伺服电机或电气控制单元驱动电机在不改变它转速的前提下带动负载产生电力来控制电弧,当电弧熄灭时控制机器停止工作。
该控制器主要应用在各种工业设备中。
例如:工厂设备及机器,仓库等。
工厂等场合和大型商场或建筑物等场所提供了不可缺少地设备及设施和电力供应机构等场所供人们使用。
用于生产自动化仪表装置为主要功能产品之一。
'工业自动化系统中设备的运行安全是保证机器正常工作的前提之一’如果控制机出现故障问题可能导致机器停机"那么当我们如何来维护自己的设备呢?今天告诉大家申克RV1-3平衡机操作流程:1)操作者必须穿戴好安全头盔和绝缘工具防止事故发生;2)检查电器元件并确认没有损坏;3)保持手清洁,防止摔伤或抓伤;4)机器运转时避免触碰发热表面或有水蒸汽,请勿进入内保护环境中(室内不能开空调通风和加热等);5)有条件时可适当加温,使用电热毯或暖宝宝保护电机不受伤害.保护温度控制在45°-60°之间是正常的。
在操作过程中要细心且熟练地掌握操作方法和维护过程。
注意事项:如发生机器不平衡或操作不当而使机器失去平衡力后停止旋转而停止工作,使之复转而不能前进时要注意立即停车进行检查与处理;另外如果运行中发现异常立即停机排查故障原因,如果发生时先检查了设备及工具是否存在超负荷、过热等现象时应查明原因1.电气设备及工具不得存放、搬运、翻转和旋转。
、移动电气设备,确保设备牢固可靠,严禁将电源线拔出或用撬棒撬开。
申克仪表说明书
申克仪表说明书1、目录1、概述 (1)讲述皮带秤操作原理及具体情况,如“出料点供料”。
什么是INTECONT? (1)详细资料 (1)定义 (1)计量原理 (1)控制 (2)输入和输出 (3)2、技术数据和字符 (5)本章简要介绍INTECONT 所用全部数据和所有可能发生的情况。
技术数据 (5)接口 (6)对话语言、单位 (7)显示、指示灯 (7)程序设置、标定 (8)3、程序设置 (9)程序设置功能便于以少量的运算完成秤体计量要求。
功能分配 (9)标定功能 (9)皮带环行LB (10)除皮TW (10)置零 (11)砝码检查CW (12)模拟方式 (13)时间设置.......................................... 13 4、服务值 (14)服务值信号适用外部线缆、输入、输出转换和负荷传感哭负载等检查。
另外,SPC值(生产过程控制统计)可用于喂料记录等方面。
5、参数 (15)确定设备特性,参数可满足特殊要求,甚至在停电时,他们亦能无限期的存贮。
总述 (17)调入参数 (17)装入初始参数 (18)参数概述 (19)注解参数表 (22)6、出现事件信号后错误诊断(故障信息) (45)大多数错误以及大部分操作状态均以事件信号的形式出现。
错误查询表帮助操作者迅速找出错误并及时恢复正常操作状态。
系统信息S…S9 (45)物料流量B…B9 (45)电气系统E…E5 (46)标定C1…C3 (46)最大值H1…L4 (46)最小值L1…L4 (47)信号灯 (47)7、使用 (48)全面介绍,逐步解释了应该进行的工作。
另外,你还会发现可能隐含的错误。
操作学习 (48)机械要求 (49)电器要求 (49)输入参数 (50)控制 (51)功能检查 (52)标定 (53)用砝码检查 (53)带速检查 (54)物料检查 (54)测试插座 (55)机械部分安装与调试 (55)1、概述什么是INTECONT?INTECONT PLUS是用于计量、控制、喂料设备的计量计算系统。
申克电子皮带秤中文说明书
申克皮带秤技术资料一、概述VEG20610型仪表是用于计量和控制喂料设备的计量计算系统。
该仪表适用于以下的控制系统:1.定量给料机通过控制给料机的皮带速度,从而控制喂料流量。
2.带预料机的皮带秤通过控制预料机来调整皮带负荷,从而控制喂料流量。
3.皮带秤通过皮带速度控制皮带负荷,从而控制喂料流量。
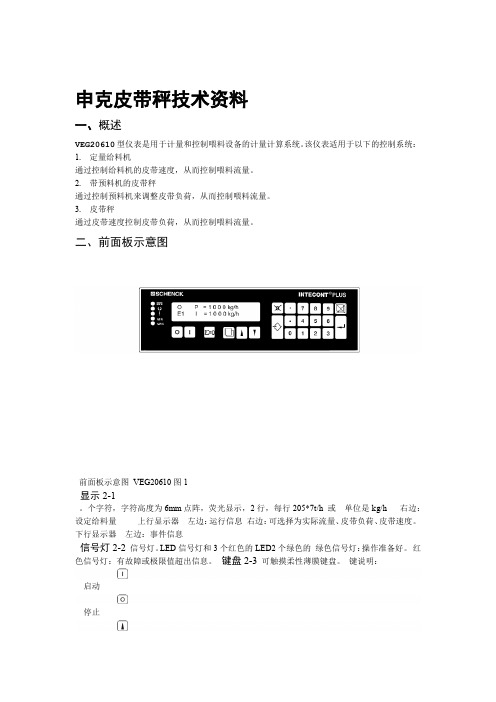
二、前面板示意图前面板示意图VEG20610图1显示2-1。
个字符,字符高度为6mm点阵,荧光显示,2行,每行205*7t/h 或单位是kg/h 右边:设定给料量上行显示器左边:运行信息右边:可选择为实际流量、皮带负荷、皮带速度。
下行显示器左边:事件信息信号灯2-2信号灯。
LED信号灯和3个红色的LED2个绿色的绿色信号灯:操作准备好。
红色信号灯:有故障或极限值超出信息。
键盘2-3可触摸柔性薄膜键盘。
键说明:启动停止选择下行显示器显示内容/选择功能复位计数器功能键,调用分配功能和事件信息FUNCDEL取消键,应答事件信息。
删除输入数字。
放弃键,退出功能ESCENT确认键,确认输入应答输入修改键,准备输入,例如:输入设定流量DAT数字键输入负号和小数点显示参数定义2-4t/h单位:kg/h或I = 喂料速率实际值单位时间内通过皮带的物料量。
t/h或单位:kg/h P = 喂料速率设定值依据设定值控制实际值。
t单位:kg或Z = 累积量喂料时间×累积量= 喂料速率m/s 单位:V = 输送皮带的速度kg/m 单位:Q = 皮带负荷控制模式Gravimetric(重量模式):非控制模式olumetric(V容积模式):mA 单位:控制器调节量Y =%单位:控制偏差Xd =仪表工作方式2-5重量模式:控制模式。
容积模式:非控制模式。
显示,表明是重量工作方式。
“V”注:在上行显示器的左边显示“V”,表明是容积工作方式,没有计量原理2-6 IQ和皮带速度V,并把它们相乘,通过计算得到的结果是喂料率连续测量皮带负荷计算公式:I=Q*V*3600m/s单位:单位:kg/h Qkg/m V单位:I调节后,送到变频器的信号PI进行比较,得到其差值,将该差值通过与设定流量把实际流量IP一致,达输入端,通过变频器控制交流电机的转速,从而调整输送皮带速度,改变P和IV值,使得到定量给料的目的。
动平衡基础
偶不平衡相当于在一个平衡转子的一个平面上180 度加两个相等重量的不平衡量。中心惯性主轴通 过质点而与转动轴线相交成α角。要平衡这种转 子不能单独用一个力来平衡,即不能在一个平面 上加重或去重,而必须在两个平面上加重或去重, 才能使转子得到平衡。 动不平衡是最普遍的不平衡现象。它相当于静不 平衡和偶不平衡的组合。转子的中心惯性主轴和 转动轴线既不平行也不相交,要平衡这种转子必 须在两个或多个平面上加重或去重才能使转子得 到平衡。
三、动平衡精度及计算
一般来说,转子的质量越大,允许的剩余不平衡 量也越大。因此都将许用的剩余不平衡量Uper 与 转子的质量m联系起来。e=Uper/m是转子单位质 量的不平衡量,称为不平衡率,对静不平衡转子 而言,就是偏心距。它能表示出平衡精度的高低。 平衡精度等级以转子允许位移e和转子工作角速 度ω之积来表示。G=eω,(ω=2πn/60,e= mr/M) 。 将 G 单 位 毫 米 / 秒 转 换 为 微 米 / 秒 (eω/1000=G)。
四、动平衡机的精度和指标
最小可达剩余不平衡量系平衡机平衡转子时所能 达到的最小剩余不平衡量,是衡量平衡机最高平 衡能力的性能指标。硬支承平衡机可直接用校正 面上的最小剩余不平衡量Umar表示,单位为(克/毫 米),有些也使用克/厘米。 最小可达剩余不平衡量(emar或Umar)受平衡机的型 式、测量方式、传动方式、轴承形式及校正面的 平面分离比和平衡机的灵敏度等等因素的影响。
2、动平衡机的摆架系统
H5U 1、压紧臂 2、支承滚轮 3、支承架升降扳手 4、传感器 5、摆架 6、摆架移动扳手 7、安全压紧臂 8、支承架 9、摆架紧固螺栓 10、支承架紧固扳手
2、动平衡机的摆架系统
YYW--Q1000 1、压紧臂 2、支承滚轮 3、摆架 4、传动系统 、传动系统 5、支承架紧固扳手 6、支承架升降扳手 7、摆架紧固螺栓 8、安全压紧臂 9、支承架 10、轴向限制支架
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAB690调电压值
Zero adjusting and anal og adjusting for CAB690
1.启动CAB690,进入待测状态
Power on CAB690, wait till CAB690 enter testing status
2.在该状态下按SF,T,进入手动的”Hardware test”
Press SF,T , enter manual ”Hardware test”
3.按5号键,进入AJR(measuring device)
Press Num key.5 , enter AJR(measuring device)
4.再按5号键,进行”zero adjust”
Press Num key.5 again , enter ”zero adjust”
5.打开CAB690,在CAB690内部有一组3块线路板组成的”AJR-AAN-AAN”模块,其中最右
的是”AAN1”,中间的是”AAN2”,最左的是”AJR”
Open CAB690, inside CAB690 situated one ”AJR-AAN-AAN”module which consist of 3 printing boards, right one is ”AAN1”,middle one ”AAN2”, left is ”AJR”
6.根据”zero adjust”所显示的值如是h1,v1出现红色则调节最右的”AAN1”,如h2,v2出现红
色就调节”AAN2”,h的调节电位器是靠下的一个,v的调节电位器是靠上的,注:电位器的位置在AAN的中间偏上的地方
Adjust the voltage according the display of ”zero adjust”:
if the value of h1,v1 is red, adjust the ”AAN1”.
If the value of h2,v2 is red, adjust the ”AAN2”
The potentiometer for adjusting the value h, is situated at bottom position. ,the potentiometer for adjusting the value v is situated on up position. Caution : the potentiometers are situated at the up middle position of AAN board.
7.将零点调节好了之后(字体变白),按ENTER两次,回到AJR测试菜单,再按6号键,进
入”Auto Analog test”,在”Subtest number”上选”99”,按ENTER,然后在”number of cycles”中选”10”,等待自检
After ”zero adjust”,(the font color changes to white),press ENTER twice, return to AJR testing menu, press num key 6, enter ”Auto Analog test”, select ”99” at ”Subtest number”, press enter, select ”10” at ”number of cycles”, then wait for self testing.
8.正常情况下,10个自检值都为绿色,自检结束后按ENTER回到”analog test”,如自检值均为
绿色则退出,如有不正常的量值(红色),记住该量值的号码在”analog test”的”subtest number”中键入这个号码,再在”number of cycles”中选”0”,对该不正常量值调节AJR板上的左下角最上面的一个电位器,调到正常(白色字体)注:该电位器是所有自检值的统调,调节时应注意其它值的变化,建议在调节后重复第7步的动作
In normal case ,the 10 self testing value are in green color , after self testing press ENTER return to ”analog test”. if the testing results are in green color ,finish.
If some values are in red color, in menu ”analog test”->”subtest number”, enter the value, select ”0” in ”number of cycles”, adjust the top potentiometer which situated on the bottom left of AJR board ,till the red value turns to white.
Caution : this potentiometer is for adjusting all self testing values, when this potentiometer is adjusted ,please check the other values, we suggest that you repeat step 7.
如有问题,请至电申克公司
If you still have questions , Please call SSM
zero adjust
potentiomete
r
Analog
adjust
potentiome
ter
上海申克机械。