杨元喜——组合导航与融合导航(简本)
北大《导航与通信导论》第十章组合导航的系统与方法(53P)

导航与通讯导论第十章组合导航系统主要了解与GNSS组合的系统和方法导航与通讯导论本章内容•概述导航与通讯导论导航与通讯导论组合导航应用广泛导航与通讯导论导航关注的问题导航与通讯导论导航系统比较•无线电导航定位系统导航与通讯导论本章内容•概述组合导航导航与通讯导论GNSS•4大全球导航卫星系统建成后,天空中GNSS组合导航系统导航与通讯导论GNSS组合导航系统-优点导航与通讯导论•提高了系统完善性GNSS组合导航系统-优点导航与通讯导论导航与通讯导论存在问题•信号接收问题•1994•双星单频–既能接收GPS L1信号,又能接收其它系统的单频信号,进行联合定位。
–对可靠性、安全性要求较高的导航和授时领域CNS100-BG Euro-80NovAtelDL-V3兼容接收机•双星双频TrimbleR8 GNSS•三星多频–GPS+GLONASS+GALILEO –BD2+GPS+GLONASS拓普康Net-G3芯片东方联星OTrack-32东方联星NavCore-S导航与通讯导论本章内容•概述导航与通讯导论导航与通讯导论惯性导航系统•惯性导航系统INS原理导航与通讯导论•加速计测量线加速度陀螺仪测量角速度导航与通讯导论通讯导论通讯导论•惯性导航系统(通讯导论•惯性导航系统属于一种平台式INS导航与通讯导论•将加速度计和陀螺仪安装在惯导平台上的惯性导航系统。
平台式INS特点导航与通讯导论•按照建立坐标系的不同,又可分为捷联式INS导航与通讯导论•将加速度计和陀螺仪安装在运动载体上,由计算机软件建立一个数学平台,取代机械惯性平台。
捷联式INS特点导航与通讯导论通讯导论•不依赖于外部信息,通讯导论INS应用导航与通讯导论•最早(导航与通讯导论本章内容•概述导航与通讯导论GPS-捷联惯性导航GNSS/INS组合导航导航与通讯导论•为了提高导航定位精度,出现了多种组合导航的通讯导论•利用通讯导论•进一步突出捷联式惯性导航系统结构简单、可靠GPS/INS优点导航与通讯导论•GPS/INS非耦合方式GPS/INS系统结构导航与通讯导论非耦合方式松耦合GPS/INS系统结构导航与通讯导论松耦合方式通讯导论•系统导航解至通讯导论紧耦合方式GPS/INS系统结构导航与通讯导论紧耦合方式GPS/INS应用实例导航与通讯导论•高精度导航与通讯导论本章内容•概述AGPS导航与通讯导论MSC AGPS服务器GPS/INU/DM组合导航系统导航与通讯导论•GPS/INU/DM(Global Positioning System/ InertialGPS/DR组合导航系统导航与通讯导论•DR (Dead Reckoning)组合导航系统导航与通讯导论INS/GPS/Odometer•INS/GPS/Odometer。
组合导航技术的发展趋势_曾伟一

技术开发与应用组合导航技术的发展趋势曾伟一1 林训超2 曾友州3 贺银平4(1.2.3.4.成都航空职业技术学院,四川成都610100)收稿日期:2011-01-10作者简介:曾伟一(1956 ),男,四川省成都市人,副教授,主要研究方向为电气自动化和微机控制技术。
摘 要:本文揭示了组合导航技术的优越性,论述了组合导航的关键技术,对硅微惯性测量单元的发展和应用情况进行了介绍,指出GNSS/INS 组合中松耦合、紧耦合与深耦合方式的技术特点,展望了耦合技术未来发展方向。
关键词:组合导航 卫星导航 惯性导航中图分类号:TN967 2 文献标识码:B 文章编号:1671-4024(2011)02-0041-04Development Tendency of Integrated Navigation TechnologyZE NG Weiyi 1,LIN Xunchao 2,ZE NG Youzhou 3,HE Yinping 4(1.2.3.4.Chengdu Aeronautic Vocational &Technical College,Chengdu,Sichuan 610100,China)Abstract This paper analyzes the advanta ges of integrated navigation technique and the key inte grated navigation technology,presents the development and application of measuring units of silicon micro inertia,points out the techniques of loose coupling,tight coupling and deep c oupling in the combination of GNSS and INS and prospects the development tendenc y of c oupling technology.Key Words integrated navigation,GNSS,I NS 组合导航是采用两种或两种以上导航系统,形成的性能更高、安全性和可靠性更强的导航方式。
“导航原理”实验教学课程思政探索与实践

2024.1黑龙江教育·理论与实践一、引言科技发展急需人才,人才培养取决于教育。
当前,随着我国社会改革的不断深化,社会思潮多样并存,各种思想交相融合,多元文化冲突更加频繁。
而学生正处于知识体系、思维方式和价值观念的形成时期,极易受到各种现象、观点、言论的影响。
极端个人主义、拜金主义、享乐主义等不良思潮给学生带来了消极影响,导致部分学生理想信念迷失、道德行为欠缺[1]。
如何培养富有社会责任感的创新人才,是近年来高等教育特别关注和不断探讨的课题。
专业课程教学融入思政元素,正是解决上述问题的一种尝试,也是加强和改进学生素质教育的一种探索[2]。
这种方式符合高等教育与时俱进的发展需要,不仅能够克服人才培养中的种种弊端,也极大地推动了高等教育的改革和创新,具有十分重要的意义[3]。
然而,课程思政在我国高校实施的时间并不长,还有待进一步健全和完善,尚需在理论上深入研究,在实践中总结经验。
文章结合“导航原理”实验教学的特点,将课程思政融入实验教学中,探索与实践该种教学方式对当代学生素质教育的提升效果。
二、“导航原理”实验教学特点“导航原理”作为高等工科院校控制科学与工程学科或航空宇航科学与技术学科的一门专业课程,是学习后续专业课程,如“飞行器控制与制导”“航天器控制”“无人机控制”“最优导航与滤波”等的基础。
“导航原理”实验教学不仅要帮助学生建立起惯性空间的概念,使学生加深对惯性器件结构特点、工作原理和基本特性的了解,实现对理论知识的验证,更重要的是通过实验使学生领悟惯性导航原理的应用规律,提高学生的动手能力、工程实践能力、设计能力和创新能力。
惯性导航系统是导弹和火箭的“眼睛”和“大脑”,提高惯性导航系统的精度是精确打击的关键。
惯性导航器件和系统的设计与制造需要精益求精的工匠精神和创新精神。
“导航原理”实验教学以培育学生科研实践能力和创新精神为目标,融合了国家战略、人才培养内涵式建设、学生个性化发展等多方面的内容[4],具有深厚的课程思政资源和基础。
开题报告书 北斗卫星导航系统(BDS)数据质量分析及定位精度评价

学科、专业
研究方向
指导教师
姓名、职称
培养学院
开题报告时间
**大学研究生院制表
重点针对重点针对重点针对现阶段基本星座下现阶段基本星座下现阶段基本星座下33颗地球同步轨道卫星颗地球同步轨道卫星颗地球同步轨道卫星geogeogeo33颗倾斜地球同步轨道卫星颗倾斜地球同步轨道卫星颗倾斜地球同步轨道卫星igsoigsoigso的北斗的北斗的北斗卫星导航系统服务性能进行了仿真分析对比了北斗卫星导航系统卫星导航系统服务性能进行了仿真分析对比了北斗卫星导航系统卫星导航系统服务性能进行了仿真分析对比了北斗卫星导航系统compasscompasscompass与与与gpsgpsgps兼容兼容兼容后在中国地区测量精度的变化后在中国地区测量精度的变化后在中国地区测量精度的变化20112011分析了北斗卫星导航系统分析了北斗卫星导航系统分析了北斗卫星导航系统的组成结构在仿真的组成结构在仿真的组成结构在仿真compasscompasscompass系统星座结构的基础上分析该系统在中国大陆区域内卫星系统星座结构的基础上分析该系统在中国大陆区域内卫星系统星座结构的基础上分析该系统在中国大陆区域内卫星的可见性的可见性的可见性pdoppdoppdop值和定位精度
基于PCA-ELM的弹载组合导航智能故障检测算法

基于PCA-ELM的弹载组合导航智能故障检测算法作者:王进达鲁浩程海彬李群生来源:《航空兵器》2019年第01期摘要:針对传统PCA-ELM(主元分析-极限学习机)算法分类效果稳定性差和准确率不高等问题,结合弹载组合导航系统卡尔曼滤波器,提出一种改进PCA-ELM故障检测方法。
首先,分析了PCA算法负载矩阵与卡尔曼滤波新息协方差矩阵的关系,构造新的权系数矩阵,并引入极限学习机对权系数矩阵进行参数优化,将参数优化后的负载矩阵进行故障分析。
最后,将该算法首次应用于弹载组合导航系统。
仿真实验表明,在检测斜坡型故障方面,检测速度和检测正确率均优于传统PCA,MSS(多子集分离法)及AIME(自主完好性外推法)算法。
关键词:神经网络;PCA-ELM;卡尔曼滤波;组合导航;故障检测;智能化中图分类号:TJ760;TP18文献标识码:A文章编号:1673-5048(2019)01-0089-06[SQ0]0引言弹载组合导航系统故障检测因其实时性、可靠性要求较高,是目前导航领域的研究热点[1]。
其研究方法目前主要集中在三个方面:基于人工智能检测方法、基于滤波器检测方法和基于数据驱动的检测方法。
基于人工智能检测方法如对神经网络[2]、遗传算法[3]等进行改进,基于滤波器检测方法如强跟踪滤波[4]、联邦滤波[5]等,基于数据驱动检测方法如状态卡方检验[6]、多子集分离法(MSS,MultiSubsetSeparation)[7]、自主完好性外推法(AIME,AutonomousIntegrityMonitoringExtrapolation)[8]等。
而这些方法都存在不同程度的缺陷,基于人工智能方法的主要缺陷在于计算复杂度较高,实际应用效果较差;基于滤波器方法是在导航滤波器的基础上改进而来,严重依赖滤波器的稳定性,而基于数据驱动方法应用较多,但相比之下故障误判率较高。
主元分析法(PCA,PrincipalComponentAnalysis)[9]是基于数据驱动的故障检测方法,该方法检测速度快、检测效率高,在工业中应用较多,在弹载应用较少。
2018年国家科学技术进步奖提名公示内容-我国信息通信研究院
7
主要完成人情况表
姓名 行政职务 工作单位
王志鹏 无
北京航空航天大学
性别 技术职称
男 讲师
完成单位
北京航空航天大学
对本项目技术创造性贡献
4
主要知识产权证明目录(10 件)
知识产权 类别
发明专利
发明专利
发明专利
知识产权具体名称
实时精密单点定位方 法
国家 (地 区)
中国
授权号
ZL 2014102 87579.4
授权日 期
2016.04 .13
证书 编号
2022 111
权利人
武汉大 学
发明专
发明人
利有效
状态
施闯、楼益
栋、宋伟伟、 易文婷、辜声
沈兵,刘建, 李晶,冯涛, 有权 卢红洋
刘建,何惠
良,沈兵,李
晶,康小勇, 卢红洋,齐海
有权
勇,杨晓婧,
杨立,邵宁
5
主要完成人情况表
姓名 行政职务 工作单位
施闯 无
北京航空航天大学
性别 技术职称
男 教授
完成单位
武汉大学
对本项目技术创造性贡献
排 名1 国 籍 中国
总体负责项目需求分析、方案设计、关键技术攻关,及项目实施协调,参与应用推广工 作,负责中国高精度位置网核心软件系统研制。设计了中国高精度位置网的总体架构,提出 基于北斗的精确坐标框架的建立方法,发展和完善了北斗厘米级实时定轨方法、非差非组合 单点定位方法等,提出了未模型化的北斗系统误差识别与精确修正模型、顾及广域大气延迟 改正约束模型等。对创新点 1、2、3、4 有贡献。
项目研究成果已经在我国公路、海事、铁路、航空、岛礁建设、大众出行等方面取得成 功应用,大幅提升了生产效率、减少了资源消耗,保障了国家位置信息安全,实现了北斗在 交通运输行业从“无”到“有”的体系化、规模化应用。形成了基于北斗的装备制造及导航、 监控、管理服务等全产业链条,直接经济效益超过 60 亿元,社会经济效益显著,对推动北斗 系统在我国关键行业和公众位置服务的规模化应用做出实质性的贡献。
重力辅助导航前沿与进展
251中国设备工程C h i n a P l a n t E n g i n e e r i ng中国设备工程 2021.03 (上)潜艇等水下自主航行器在水下航行一般依靠惯性导航系统进行导航,惯性导航系统的重要组成元件是陀螺仪和加速度计,这些敏感元件测得的加速度通过对时间进行积分后可以得到速度、偏航角、位置等信息。
积分过程中,误差随时间累积增大,潜艇长期在水下运行时导航精度降低。
针对惯性导航系统的这一缺点,许多学者提出将重力匹配、地磁匹配、地形匹配等无源导航方法与惯性导航系统组合起来,对惯性导航进行修正。
水下重力匹配技术实现的核心问题是构建全球高精度和高空间分辨率的海洋重力异常图。
测高/重力卫星、船测、航空是获得全球海洋重力场的主要技术途径,全球高精度和高空间分辨率的海洋重力异常图能有效提高水下重力匹配导航精度,但目前我国的全球海洋重力异常图空间分辨率较低,因此,需要在一定程度上对其进行插值加密,重构为高精度高空间分辨率的海洋重力异常图。
由于海洋重力异常图经过插值后,空间分辨率会提升,但是,精度会降低,因此,空间分辨率和精度成反比关系(随着空间分辨率提高,精度将降低)。
为了使空间分辨率与精度均满足高精度水下重力匹配导航,对重力场的插值方法的研究成为此领域的研究热点。
1 海洋重力异常图插值方法目前,常见的海洋重力场异常图插值方法可具体分为两类,第一类为基于函数插值方法,第二类为基于统计学插值方法。
函数插值方法有径向基函数插值法、曲线曲面插值法、样条函数插值法。
统计学方法有克里金插值法、距离加权反比插值法、改进的Shepard 插值法。
距离加权反比插值是最简单的插值方法。
该方法根据未知点到已知点距离加权平均值计算未知点的值。
距离加权反比插值法的具体计算公式如下:101(/)(1/)Nii i N ii Zd Z d ===∑∑重力辅助导航前沿与进展王彤(中国空间技术研究院,北京 100094)摘要:水下导航一直是导航领域重要的研究方向。
从国际卫星导航系统发展谈加速中国北斗卫星导航系统建设_朱筱虹
文章编号:0494-0911(2011)08-0001-04中图分类号:P228.4文献标识码:B从国际卫星导航系统发展谈加速中国北斗卫星导航系统建设朱筱虹,李喜来,杨元喜(北京环球信息应用开发中心,北京100094)Considerations for Accelerating Compass Construction from the Viewpoint of International GNSS DevelopmentZHU Xiaohong ,LI Xilai ,YANG Yuanxi摘要:全球卫星导航系统GPS 、Galileo 、GLONASS 和COMPASS /Beidou 发展迅猛。
美国的WAAS 、欧洲的EGNOS 、俄罗斯的SDCM 以及中国的广域增强系统建设都取得了重大的研究成果;日本的QZSS 和MSAS ,印度的IRNSS 和GAGAN 的建设也取得了重大突破。
通过对国外卫星导航系统的发展动态、关键技术和政策法规的跟踪与分析,运用比较、归纳的方法,提出中国北斗卫星导航系统所面临的问题及可能采取的对策,以期对中国的自主卫星导航系统建设有所借鉴。
关键词:全球卫星导航系统;北斗卫星导航系统;卫星导航政策;卫星导航标准;兼容互操作收稿日期:2009--作者简介:朱筱虹(1975—),女,山东德州人,硕士,工程师,主要从事测绘导航信息服务与保障、出版编辑等工作。
一、引言近几年来,全球卫星导航系统(GNSS )在国家安全、经济及社会发展中的作用越来越显著,世界各主要大国都竞相发展独立自主的卫星导航系统,几乎所有卫星导航系统都进入了高速发展阶段。
美国的GPS 是目前正在成功运行的全球卫星导航系统,俄罗斯的GLONASS 系统正在恢复阶段,欧洲正在开发Galileo 系统,中国正在开发北斗全球卫星导航系统。
2000年,我国首先建成北斗导航试验系统,使中国成为继美、俄之后的世界上第三个拥有自主卫星导航系统的国家。
组合导航技术的发展

EKF)对INS旳速度、位置、姿态以及传感器误差进 行最优估计,并根据估计成果对INS进行输出或者反 馈校正。
6、卫星导航与惯性导航组合方式(续)
松组合旳主要优点
4.3 脉冲星导航
➢ 脉冲星是太阳系以外旳遥远 天体,它们旳位置坐标,如 恒星星表一样构成一种高精 度惯性参照系;
➢ 脉冲星按一定频率发射稳定 旳脉冲信号,其长久稳定度 好于最稳定旳铯原子钟。
➢ 脉冲星能够提供绝好旳空间参照基准和时间基准,所以脉 冲星是空间飞行器旳极好旳天然导航信标。
4、天文导航(续)
系统旳容错功能。 ➢ 提升导航系统旳抗干扰能力,提升完好性。
6、卫星导航与惯性导航组合方式
6.1 涣散组合(Loosely-Coupled Integration)
松组合基本概念
➢ 松 组 合 又 称 级 联 Kalman 滤 波 (Cascaded Kalman Filter)方式。
➢ 观察量——INS和GNSS输出旳速度和位置信息旳差 值;
➢ 另外,因为没有GLONASS卫星旳精确轨道源数 据 , 故 无 法 测 定 精 度 。 与 GPS 相 比 这 是 GLONASS旳个一主要缺陷。
2、卫星导航旳发展即存在旳问题
2.2 卫星导航存在旳问题(续)
3)GALILEO存在旳主要问题
“伽利略计划”是由欧盟委员会和欧洲空间局共同发起并 组织实施旳欧洲民用卫星导航计划,它受多个国家政策 和利益旳制约,政策具有摇摆性。 因为欧盟受美国旳影响极大,“伽利略计划”本身旳独立 性值得怀疑; GALILEO计划目前已经延后,考虑到目前旳金融危机 ,未来旳GALILEO怎样发呈现在还看不清楚。
我国海洋大地测量基准与海洋导航技术研究进展与展望_杨元喜
第46卷 第1期测 绘 学 报Vol.46,No.1 2017年1月Acta Geodaetica et Cartographica Sinica January,2017引文格式:杨元喜,徐天河,薛树强.我国海洋大地测量基准与海洋导航技术研究进展与展望[J].测绘学报,2017,46(1):1-8.DOI:10.11947/j.AGCS.2017.20160519.YANG Yuanxi,XU Tianhe,XUE Shuqiang.Progresses and Prospects in Developing Marine Geodetic Datum and MarineNavigation of China[J].Acta Geodaetica et Cartographica Sinica,2017,46(1):1-8.DOI:10.11947/j.AGCS.2017.20160519.我国海洋大地测量基准与海洋导航技术研究进展与展望杨元喜1,2,徐天河3,薛树强41.地理信息工程国家重点实验室,陕西西安710054;2.西安测绘研究所,陕西西安710054;3.山东大学(威海)空间科学研究院,山东威海264209;4.中国测绘科学研究院,北京100830Progresses and Prospects in Developing Marine Geodetic Datum and MarineNavigation of ChinaYANG Yuanxi 1,2,XU Tianhe3,XUE Shuqiang41.State Key Laboratory of Geo-information Engineering,Xi’an 710054,China;2.Xi’an Research Institute of Surveyingand Mapping,Xi’an 710054,China;3.Institute of Space Science,Shandong University,Weihai 264209,China;4.Chinese Academy of Surveying and Mapping,Beijing 100830,ChinaAbstract:Territorial water is a significant part of national sovereignty of China,thus the infrastructures ofnational space datum and location services should not only cover the land areas,but also the sea areas.China hasestablished relatively complete geodetic datum in land areas over the past decades,including the new developedChina Geodetic Coordinate System 2000(CGCS 2000)and the national gravity datum 2000.However,thecurrently used geodetic infrastructures have not well covered the sea areas of China.The marine geodetic datumand marine navigation technologies need to be further developed and extended to satisfy the national demands ofmarine defense and marine economy development in new era of China.This paper mainly reviews the developingstates and progress of Chinese marine geodetic datum and marine navigation,analyses key technologies inestablishing the national marine geodetic datum.The develop current trends and future directions for the nationalmarine geodetic datum and marine navigation technologies are listed.Key words:marine surveying;geodesy;datum;underwater navigation;positioningFoundation support:The National Key Research and Development Program of China(No.2016YFB0501700)摘 要:领海是国家主权的重要组成部分,国家空间基准和位置服务应该覆盖陆地和海洋。
组合导航系统多源信息融合关键技术研究

组合导航系统多源信息融合关键技术研究一、本文概述随着导航技术的快速发展,组合导航系统已成为现代导航领域的重要研究方向。
它通过整合多种导航源的信息,以提高导航精度和可靠性,广泛应用于航空、航天、航海、智能驾驶等领域。
然而,多源信息融合作为组合导航系统的核心技术,其研究仍面临诸多挑战。
本文旨在探讨组合导航系统多源信息融合的关键技术,并分析其在实际应用中的效果与前景。
本文首先对组合导航系统及其多源信息融合的基本原理进行简要介绍,阐述多源信息融合在组合导航系统中的重要性和意义。
接着,文章重点分析了多源信息融合中的关键技术,包括数据预处理、信息融合算法、误差处理等方面。
在此基础上,文章通过实例分析,展示了多源信息融合技术在提高导航精度、增强系统可靠性以及应对复杂环境等方面的优势。
本文还对多源信息融合技术在组合导航系统中的应用进行了深入研究,探讨了不同导航源之间的融合策略和优化方法。
文章最后对多源信息融合技术在组合导航系统未来的发展趋势进行了展望,旨在为相关领域的研究人员和实践者提供有益的参考和启示。
二、组合导航系统基本原理组合导航系统是一种将多种导航传感器进行有机融合,以提高导航精度和可靠性的技术。
其基本原理主要基于多传感器信息融合技术,通过对不同导航传感器(如GPS、惯性导航系统、天文导航、地形匹配等)提供的导航信息进行合理处理和优化组合,以减小单一传感器误差,增强导航系统的整体性能。
传感器数据采集:从各种导航传感器中收集原始数据,这些数据可能包括位置、速度、加速度、姿态角等多种信息。
数据预处理:对采集到的原始数据进行必要的预处理,如去噪、滤波、校准等,以提高数据质量和为后续的数据融合提供基础。
数据融合:这是组合导航系统的核心部分。
通过采用适当的算法(如卡尔曼滤波、粒子滤波、神经网络等),将多个传感器的数据进行融合,生成一个更为准确、可靠的导航解算结果。
数据融合不仅需要考虑各传感器数据的权重分配,还要处理可能出现的传感器冲突和异常。
武汉大学空间定位与导航工程研究所课程

·卫星轨道基础课程简介本课程主要介绍卫星轨道的分类;时间系统与坐标系统;二体问题下的卫星轨道理论与初轨计算方法;卫星的摄动轨道;卫星的轨道机动和人造卫星的轨道设计等内容。
通过学习本课程,可以基本掌握人造卫星运行轨道的基础理论知识,为进一步学习卫星轨道确定和卫星轨道设计做准备。
第四学期开设教材:卫星轨道基础(讲义),待编。
参考书目:[1]近地航天器轨道基础,国防科技大学出版社,郗晓宁、王威、高玉东,2003年;[2]航天器轨道理论,国防工业出版社,刘林,2001年6月。
·组合导航课程简介组合导航系统是随着计算机、最优滤波原理的发展而迅速发展起来的一种多系统、多功能、高可靠性的导航系统。
目前组合导航系统已在国内外航空、航天、航海和陆地车辆的导航定位中得到广泛应用,它是导航技术发展的主要方向之一。
通过本课程的学习,学生能基本掌握和了解组合导航技术,对它的基本原理、特点、应用及最新发展有一个比较全面的认识。
对组合导航系统的应用有更深入理解。
本课程包含以下内容的知识:组合导航系统的基本思想、组合导航系统的最优估计方法(卡尔曼滤波)及其特点、GPS/INS组合导航系统的原理和方法及其应用。
教学过程中采用多种教学方法结合的方式。
课堂教学采用以PowerPoint 课件授课为主并与传统教学方法相结合的授课形式;注重设计和开发具有综合性、创新性的课堂实践项目。
通过课堂实习,使学生加深对理论知识的理解。
采用网络答疑。
现代网络信息的发展,为学生的远程教学和答疑提供了良好的平台。
比如布置作业、网上讨论,网上解答疑问。
通过email形式师生相互间进行交流。
课程安排开设在第七学期,这时前导课程:《GPS原理及应用》、《GPS测量数据处理》、《Matlab》、《导航学》等都已学完。
教材:组合导航,武汉大学自编讲义。
参考书目:[1]卡尔曼滤波与组合导航原理,西北工业大学出版社,秦永元、张洪钺、汪叔华编著,1998年;[2]导航系统,,航空工业出版社,袁信,俞济祥等著1993年;[3]Integrated Navigation and Guidance Systems,American Institute of Aeronautics and Astronautics,Inc,Daniel J.Biezad,1999。
bdsins组合导航技术研究进展
作者简介:
李 红 (1987-),男 ,湖 南 娄 底 人 ,硕 士 研 究 生 ,研 究 方 向 为 北 斗 与 惯 性 组 合 导 航 技 术
收 稿 日 期 :2015-03-12
修 稿 日 期 :2015-03-30
(下转第 72 页)
现代计算机 2015.04 中 趩趹
研究与开发
Summary of Reversible Information Hiding
4 结语
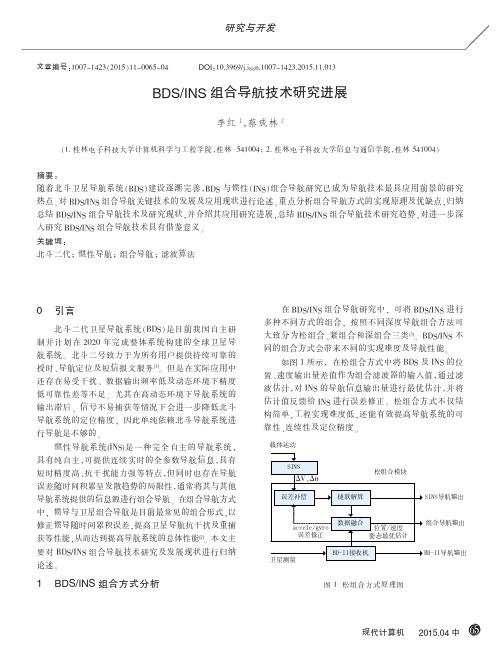
近年来受高动态、抗干扰、高精度导航性能需求的 推动, 组合导航技术已成为导航技术最具潜力的发展 方向。 随着我国北斗卫星导航技术发展日臻完善,加速 研究与 BDS 相关的组合导航技术对我国导航技术的发 展具有重要的战略意义。 随着巨大的市场需求,组合导 航系统将会向着泛在导航,室内外无缝定位技术发展, 成为促进现代导航位置信息服务核心推动力, 对支撑 导航与位置服务新兴产业的发展, 将会带来巨大的发 展前景和商业价值。
3 应用研究现状
北斗卫星导航系统自对用户开放使用以来, 已被 广泛应用到车载导航、基础测绘、通信服务、气象观测、 海洋渔业、勘探等多个领域。 随着北斗卫星系统建设的 逐渐完善“北斗”导航在车载位置服务、测绘、应急求助 等军民用市场得到批量应用, 如在某高精度测量应用 中“北斗”已占据 1/3 市场份额[10]。
现场电能表误差的电阻测试法
r标准
x10 =( 0 %
实 际
_1 ×1 )
() 5
式 () 5就是我们 推 导 的 现场 电能表 实 测 误差 的 时 间
参数表达式 。 讨论 : 当 实 ① 际=t p时 , )=0 这 是理 想情 况 ; b. 则 , , s
② 为 了在 测试过程 中得 到必要 的数 据 , 推荐 优 先 采
式 中 : 实 一 电能 表显 示 的实 际 电能 ,Wh 际 k ;
准 电能表应计 量 的标准 电能 , 。 一 k
为简化 计算 , 假设 在 测试 过 程 中纯 电 阻负 载及 其 功
率因数 cs 保持不变 , o ̄ 略去 电能累计时间 t于是式 ( ) , 1 可 写成
y= x 1 0% 0 = x 1 0% 0
:
采用 电炉作 为纯 电阻负 载 的电阻 测试法 是 简便易 行 的, 适用 于单相 电能表 、 直通 式或 经流互 感器 接人 式三 相 四线 电能表 的误 差测 试 。但 在 现 场 测试 过 程 中 , 须 注 必 意 所选用 的是 同相 电压 和电流 , 否则会 发 生接线 错误 。
() 7
[] 1滕云鹤 , 毛献辉 , 章燕 申. 移动卫星通信 捷联式 天线稳定 系统 [ ] J.
宇航学报 ,02,35 :2—7 . 20 2 ( )7 3 [] 2 李连升 , 张志英 , 刘绍 求 , 现代 雷达伺服 系统 [ . M]北京 : 国防工业
出 版 社 ,97 18 .
# 实际B=3 s £ 9 , 实际c=3 s 8;
() 2
式 中 : 实 一 电能表显 示 的实际功 率 ,W; P 际 k P 准 电能表应计 量 的标准 功率 ,W。 标 一 k 12 电能表 实测误 差 的时 间参数表 达式 . 首先 , 假设 电能 表 存 在 误 差 ( 7≠0 , 其 配 用 的 电 )与 流互 感器 变 比 , 电 能 表 铝 盘 转 动 n圈 所 需 时 间 t 令
GPS/SINS紧组合导航系统信息融合技术研究
K e y wo r d s:GP S;S I N S;t i g h t l y i n t e g r a t e d n a v i g a t i o n;Ka l ma n f i l t e in r g
惯 性 导 航 是 一 种 完 全 自主 的 导 航 系 统 , 具 有 隐 蔽 性
Ab s t r a c t :I n o r d e r t o i mp r o v e t h e n a v i g a t i o n p r e c i s i o n o f mi s s i l e u n d e r t h e c o mp l e x e n v i r o n me n t. Wi t h GP S / S I NS T i g h t l y— C O U —
r e p l i e d t o G PS / S I NS t i g h t l y —c o u p l e d i n t e g r a t e d n a v i g a t i o n s y s t e m, a n d t h e s i mu l a t i o n r e s u l t i n d i c a t e s UKF t a k e s p r e c e d e n c e o f EKF i n t h e e s t i ma t i o n o f p o s i t i o n a n d v e l o c i t y . Mo r e o v e r , UK F h a s t h e b e t t e r s t a b i l i t y a n d s t y p t i e i t y.
p l e d i n t e g r a t e d n a v i g a t i o n s y s t e m a s t h e o b j e c t o f t h e r e s e a r c h , i f r s t o f a l l ,t h e ma t h e m a t i c a l mo d e l o f G P S / S I N S T i g h t l y — c o u p l e d i n —
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0
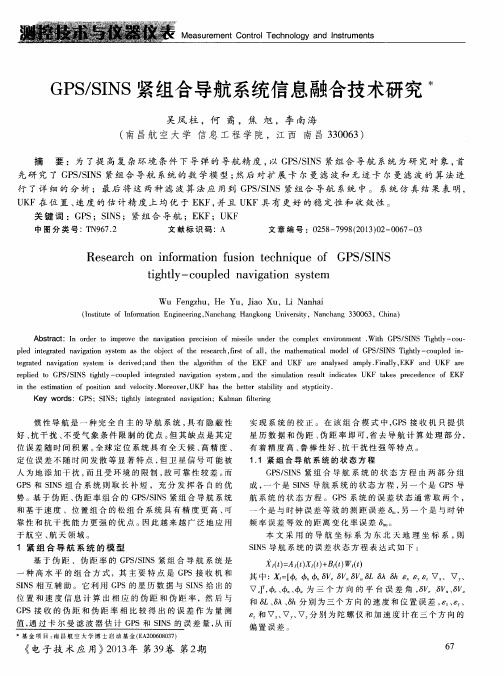
Veast
2000
4000
6000
8000
800 400 0
dB
0
2000
4000 Second
6000
8000
0
2000
4000
Second
6000
8000
位置误差
速度误差
4、天文导航
4.1 天文导航的基本概念与原理
根据天体来测定飞行器位臵和航向的导航技术。即以 天体为参考点,确定飞行器在空中的真航向。 天体的坐标位臵和它的运动规律是已知的,测量天体 相对于飞行器参考基准面的高度角和方位角就可以计 算出飞行器的位臵和航向。 星体跟踪器望远镜对准天体方向可以测出飞行器前进 方向(纵轴)与天体方向(即望远镜轴线方向)之间 的夹角(称为航向角)。天体任一瞬间相对于子午线 的夹角(即天体方位角)已知,天体方位角减去航向 角即得飞行器的真航向。
4、天文导航(续)
有效提高自主导航能力:
X射线脉冲星导航在脉冲星参数确定后,在较长时间内 ,可完全实现自主导航。大大减轻地面测控系统的工 作负担,减少测控站的布设数量,降低航天器的运行 管理和维持费用。
作为现有卫星导航系统的备份:
当人造卫星导航系统受到人为干扰或破坏,以至不能 进行导航服务时,单独利用 X射线脉冲星导航,可起 到有效的备份作用。
5、组合导航系统(续)
5.3 卫星导航与惯性导航的组合 需求
尽管卫星定位系统具有较高精度和较低的成本,且 具有长期稳定性。多类导航卫星组合仍然不能完全 摆脱卫星信号受遮挡而不能实施导航的风险。当载 体通过遂道或行驶在高耸的楼群间的街道时,这种 信号盲区一般不能通过多类卫星组合加以克服。 INS由于具有全天候、完全自主、不受外界干扰、可 以提供全导航参数(位臵、速度、姿态)等优点, 是目前最主要的导航系统之一。INS有一个致命的缺 点:导航定位误差随2 卫星导航存在的问题(续)
3)GALILEO存在的主要问题 “伽利略计划”是由欧盟委员会和欧洲空间局共同发 起并组织实施的欧洲民用卫星导航计划,它受多个 国家政策和利益的制约,政策具有摇摆性。 由于欧盟受美国的影响极大,“伽利略计划”本身 的独立性值得怀疑; GALILEO计划目前已经延后,考虑到目前的金融危机, 未来的GALILEO如何发展现在还看不清楚。
北斗一号用户受限,用户过多会造成信道拥挤; 信号需双向传送,很难满足高动态定位要求;
2、卫星导航的发展即存在的问题
3)北斗卫星定位系统可能存在的问题
接收机生产厂家生产的接收机也必须入网注册, 否则无法定位; 接收机必须经过特许部门的测试才有市场准入; 接收机市场竞争局面很难打开;
2、卫星导航的发展即存在的问题
2.2 卫星导航存在的问题
1)美国GPS可能存在问题 美国2000年之后每年都将审议一次SA政策;
美国军方声称随时都有可能改变GPS政策;
GPS的系统信号在高纬度地区经常出现盲区; 美国国防部曾强调,限制敌人在战时利用GPS。 结论:GPS不能保证安全、连续、精确、可靠导航
5、组合导航系统(续)
卫星组合导航的性能优势
由于多星座提高了卫星星座的几何结构,增强了可用 性(availability); GPS/GLONASS/COMPASS/Galileo 全部建成后,卫星覆 盖率将极大增强(星空璀璨 ——100 颗卫星以上), 提高导航定位的连续性(continuity); 多卫星信号组合可以很容易地探测和诊断某类卫星信 号的故障和随机干扰,并及时予以排除或及时给用户 发送预警信息,提高导航系统的抗干扰能力,从而提 高系统的完好性(integrity); 多卫星系统可提高相位模糊度搜索速度…。
5、组合导航系统(续)
卫星组合导航的误差补偿优势
利用多种导航卫星信号有利于误差补偿提高导航定位 的精度和可靠性。 ► 系统误差——轨道系统误差、卫星钟差、多路径误 差…; ► 随机误差——信号随机误差、轨道随机误差、钟差 随机误差…;
► 有色噪声——太阳光压、随时间变化的钟差…;
► 异常误差——周跳、变轨误差…。
2、卫星导航的发展即存在的问题
2.2 卫星导航存在的问题(续)
3)北斗卫星定位系统可能存在的问题 北斗一代系统由三颗地球同步卫星、一个地面控制 中心及各类用户接收机组成。 “北斗一号”覆盖范围小,服务区由东经 70 度至东 经 145 度,北纬 5 度到北纬 55 度,覆盖我国和周边地 区。 “北斗一号”采用双星定位技术,只能为终端用户 提供经度和纬度,无法为用户提供所在高度的数据, 因此需要预先存储需定位目标的地面高程信息,并 通过与地面中心站的联系才能推算高度。
提高导航系统的抗干扰能力,提高完好性。
6、卫星导航与惯性导航组合方式
5、组合导航系统(续)
5.2 多星座卫星导航组合
需求
GPS 、GLONASS 、 BD及GALILEO卫星导航系统,本身都 存在着固有的缺陷或人为施加的干扰,于是,使用 单一的卫星导航系统存在着很大风险。 GPS系统受美国国家政策的影响,随时可能出现人为 “故障”,使得非美国的盟国不能利用卫星资源, 或其卫星信号中存在显著的异常干扰。 GLONASS系统,虽然尚无明确的信号干扰政策,但它 由俄罗斯空军控制,特殊时期的应用难以保证,而 且GLONASS卫星的稳定性较差,导航精度也成问题。
提供良好的时间频率源:
可用于监测原子钟的长期稳定度。长期观测多颗脉冲 星可以建立综合脉冲星时,并应用于导航系统,实现 系统时间的维持。在航天器运行期间,也可用于修正 搭载原子钟钟面时,减少地面监测站信息注入次数。
扩大导航定位覆盖范围:
X射线脉冲星导航可以精确自主地为飞行器提供位臵 、姿态和自然时间源。可用于空间攻防战,极大增 强我国的太空防御能力。
2、卫星导航的发展即存在的问题
2.1 卫星导航的发展
卫星定位系统是一种天基无线电导航系统。 它能够在全球范围,为多个用户,全天候、实时、 连续地提供高精度三维位臵、速度及时间信息。 目前己经投入运营或正在建设的几个主要的卫星导 航系统有: 美国:GPS; 俄罗斯:GLONASS; 欧空局:GALILEO; 中国:COMPASS。
5、组合导航系统(续)
卫星组合导航的缺点
1 )存在信号遮挡。当接收机天线被建筑、隧道等遮挡 时,卫星信号中断,无法定位。 2 )抗干扰能力差。当存在人为干扰时,接收机码环环 路很容易失锁,导致接收机无法定位。 3)多类卫星信号在同一载体上常形成互相干扰。 4)数据输出频率低。尽管目前一些新的 GPS接收机可以 提供 10 Hz 的无插值定位输出,但大多数接收机的定 位输出频率仍然为1 Hz。 5)GPS、GLONASS、GALILEO分别由各自研制国直接控制, 使用权受制于人。
5、组合导航系统
5.1 背景
为了提高对动态载体运动目标(导弹、飞机、卫星、 坦克、车辆、舰船等)的跟踪精度或对动态系统的状 态估计精度,需要多传感器的组合导航。 单一传感器提供的信息很难满足目标跟踪或状态估计 的精度要求,采用多个传感器进行组合导航,并将多 类信息按某种最优融合准则进行最优融合,可望提高 目标跟踪或状态估计的精度。 多传感器组合导航(多星座卫星组合、卫星导航与惯 性导航的组合等)成为导航系统的发展趋势。
6、组合导航系统(续)
GNSS与INS组合导航的优势
可发现并标校惯导系统误差,提高导航精度。 弥补卫星导航的信号缺损问题,提高导航能力。 提高卫星导航载波相位的模糊度搜索速度,提高信 号周跳的检测能力,提高组合导航的可靠性。 可以提高卫星导航接收机对卫星信号的捕获能力, 提高整体导航效率。 增加观测冗余度,提高异常误差的监测能力,提高 系统的容错功能。
4、天文导航(续)
4.2 天文导航的优点 天文导航系统是自主式系统,不需要地面设备;
不受人工或自然形成的电磁场的干扰;
不向外辐射电磁波,隐蔽性好;
定向、定位精度高,定位误差不随时间累积。
因而天文导航得到广泛应用,并将在未来的深空 探测中发挥更加广泛的作用。
4、天文导航(续)
4.3 脉冲星导航
3、惯性导航特点
3.1 惯性导航的优点
与外界不发生任何光、电和磁联系——隐蔽性好;
工作不受气象条件的限制——可用性强;
完全依靠运动载体设备自主完成导航任务——自主 性好; 能够提供比较齐全的导航参数——参数齐全; 目前已广泛应用于潜艇、水面舰艇、军用飞机、战 略导弹和战术导弹、战车和人造卫星等领域——应 用面广。
组合导航与融合导航的发展
杨元喜
1
1、概述
1.1 概念
组合导航——同一平台、多传感器实施互补、互验、 互校的导航系统。特点:各传感器独立输出导航信 息。 融合导航 ——同一平台、多传感器实施信息融合的 导航系统。特点:多传感器、统一输出导航信息。 组合导航一般强调硬件的最佳组合; 融合导航一般强调多传感器数据融合算法;
2、卫星导航的发展即存在的问题
2.2 卫星导航存在的问题(续)
2)GLONASS存在的主要问题 与 GPS 相比, GLONASS 因运行时间短,用户尚少, 目前还不具备象 GPS 增强系统和 IGS 网络长期不间 断的观测信息支持。 GPS 接 收 机 市 场 十 分 活 跃 , 产 品 不 断 翻 新 , 而 GLONASS 目前还未达到这一水平,且 GLONASS 接收 机供应严重不足。 此外,因为没有GLONASS卫星的精确轨道源数据, 故无法测定精度。与 GPS 相比这是 GLONASS 的个一 主要缺陷。
2、卫星导航的发展即存在的问题
3)北斗卫星定位系统可能存在的问题 由于地面高程精度不高,且卫星数量少,无冗余信息, 定位精度和可靠性不高。 用户必须向地面中心站申请定位,才能获得定位信息, 于是用户的隐蔽性成问题。 由于地面中心站是北斗一代的核心,地面中心站一旦 遭攻击,整个卫星系统将陷入瘫痪。