最新02传感器图组
西克 Lector61x 图像读码器操作说明书

Lector61x 基于图像的读码器所说明的产品Lector61x制造商SICK AGErwin-Sick-Str.179183 Waldkirch, Germany德国法律信息本文档受版权保护。
其中涉及到的一切权利归西克公司所有。
只允许在版权法的范围内复制本文档的全部或部分内容。
未经西克公司的明确书面许可,不允许对文档进行修改、删减或翻译。
本文档所提及的商标为其各自所有者的资产。
© 西克公司版权所有。
版权所有原始文档本文档为西克股份公司的原始文档。
2操作说明 | Lector61x8024899/17IL/2020-04-02 | SICK如有更改,恕不另行通知内容内容1关于本文档的 (5)1.1关于操作指南的信息 (5)1.2适用范围 (5)1.3符号说明 (5)1.4更多信息 (6)2安全信息 (7)2.1按规定使用 (7)2.2违规使用 (7)2.3网络协议(IP)技术 (7)2.4责任范围 (7)2.5更改和改装 (8)2.6对专业人员和操作人员的要求 (8)2.7工作安全和特殊危险 (9)3产品说明 (11)3.1产品识别 (11)3.2供货范围 (12)3.3产品特征 (13)4运输和仓储 (17)4.1输送 (17)4.2拆封 (17)4.3运输检查 (17)4.4储存环境 (17)5装配 (18)5.1安装提示 (18)5.2安装准备 (18)5.3安装位置 (19)5.4设备的安装 (25)5.5安装读取周期传感器(可选) (26)6电气安装 (27)6.1安全性 (27)6.2接线提示 (29)6.3接线图 (30)6.4电气接口的针脚分配 (32)6.5连接设备 (33)7调试 (39)7.1使用 SOPAS ET 配置设备 (39)7.2不使用配置软件 (SOPAS ET) 通过按键配置设备 (40)7.3初次调试 (41)8024899/17IL/2020-04-02 | SICK操作说明 | Lector61x3如有更改,恕不另行通知内容8维护 (43)8.1维护计划 (43)8.2清洁 (43)9故障排除 (45)9.1一般故障、警告和错误 (45)9.2显示状态记录 (45)9.3SICK 服务 (45)9.4维修 (45)9.5退回 (45)9.6替换设备 (46)10停机 (47)10.1废弃处理 (47)11技术数据 (48)11.1特点 (48)11.2机械/电气参数 (49)11.3性能参数 (49)11.4接口 (50)11.5环境参数 (51)12配件 (52)13附件 (53)13.1欧盟合规性声明/证书 (53)13.2电缆一端敞开的电缆信号分配 (53)13.3接口模块 CDB650-204 的接口平面图 (54)13.4接口模块 CDM420-0006 的接口平面图 (63)13.5版权声明 (71)13.6网络安全提示 (71)4操作说明 | Lector61x8024899/17IL/2020-04-02 | SICK如有更改,恕不另行通知1关于本文档的1.1关于操作指南的信息本操作指南提供有关操作 SICK AG 公司设备的重要提示。
图像传感器原理介绍CCD和CMOS介绍V12 课件

全景Full-Frame
? 全像 CCD 则是一种架构更简单的感光设计。有鉴于 IL 的缺点, FF改良可以利用整个感光区域(没有暂存区的设计),有效增 大感光范围,同时也适用长时间曝光。其曝光过程和 Interline 相同,不过感光和电荷输出过程是分开。因此,使用 FF CCD 的数字相机在传送电荷信息时必须完全关闭快门,以隔离镜头 入射的光线,防止干扰。这也意味着 FF 必须使用机械快门 (无法使用 IL 的电子 CLOCK 快门),同时也限制了 FF CCD 的 连续拍摄能力。 Full-Frame CCD 大多被用在顶级的数位机背上。
数字相机的快门开启,来自影像的光线穿过这些 马赛克色块会让感光点的二氧化硅材料释放出电 子〈负电〉与电洞〈正电〉。经由外部加入电压, 这些电子和电洞会被转移到不同极性的另一个硅 层暂存起来。电子数的多寡和曝光过程光点所接 收的光量成正比。在一个影像最明亮的部位,可 能有超过 10万个电子被积存起来。
14 PPT课件
CCD外形尺寸信息
15 PPT课件
原理篇
16 的工作需求,业界发展出四种 不同类型的 CCD :
? Linear 线性、 ? Interline扫瞄、 ? 全景 Full-Frame ? Frame-Transfer 全传
17 PPT课件
CCD分辨率
19 PPT课件
黑白CCD的组成结构图
20 PPT课件
彩色CCD的组成结构分图
?CCD 的三层结构:上:增光镜片、中:色块网格 下:感应线路
? 由微型镜头、马赛克分色网格,及垫于最底层的 电子线路矩阵所组成
21 PPT课件
彩色CCD运行图
22 PPT课件
彩色CCD运行图说明
粉尘传感器(ZPH02)使用说明书

粉尘传感器(型号:ZPH02)使用说明书版本号:1.2实施日期:2018-05-16郑州炜盛电子科技有限公司Zhengzhou Winsen Electronic Technology Co.,Ltd声明本说明书版权属郑州炜盛电子科技有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用炜盛科技的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您不依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
郑州炜盛电子科技有限公司ZPH02粉尘传感器产品描述本传感器整合红外PM2.5检测技术,采用粒子计数原理对环境中PM2.5进行检测。
可灵敏检测直径1μm以上灰尘颗粒物。
传感器在出厂前经过老化、调试、标定、校准,具有良好的一致性和较好的灵敏度。
传感器特点长期稳定性好 灵敏度高 接口输出方式丰富一致性好易安装、维护主要应用空气净化器 新风系统 空气清新机空调系统便携仪表烟雾报警器技术指标表1产品型号ZPH02工作电压范围5±0.2V(DC)输出方式低电平时间比率%(推荐时间30s)输出信号电压5±0.2V检测能力检出粉尘最小粒子1μm预热时间≤1min(整机热稳定时间)工作电流≤90mA湿度范围储存环境≤95%RH 工作环境≤95%RH温度范围储存环境-30℃~50℃工作环境0℃~50℃外形尺寸(L×W×H)59.5×44.5×20mm 物理接口EH2.54-5P端子插座试验分类NO.试验项目条件及要求结果1规格尺寸1、尺寸规格尺寸确认电气特性确认内部电阻间距确认符合图纸要求n=10OK2冷热冲击(冷热冲击箱)1冷热冲击1-40℃30m←→10s内←→80℃30m为1个循环,10个循环①外观无显着异常②电气参数满足要求满足:下限*0.7~上限*1.3n=10OK3冷热冲击(冷热冲击箱)2冷热冲击2-25℃1H←→70℃1H为1个循环,100个循环①外观无显着异常②电气参数满足要求满足:下限*0.7~上限*1.3n=10OK4高温高湿(高温湿箱)1#高温高湿放置60±5℃,90±5%RH,72H放置①外观无显着异常②电气参数满足要求满足:下限*0.7~上限*1.3n=10高温负荷(THB)60℃±5℃,90±5%RHDC5V72H连续通电①外观无显着异常②电气参数满足要求满足:下限*0.7~上限*1.3n=10OK5低温(高低温箱)2#低温放置-30℃,500H测试一次,1000H测试一次。
智泽 雨量传感器产品说明书

雨量传感器产品说明书目录1.产品简介 (4)1.1产品概述 (4)1.2功能特点 (4)2.参数详情 (5)2.1外形尺寸图 (5)2.2基本参数 (5)2.3通讯协议 (6)2.3.1通讯基本参数 (6)2.3.2数据帧格式定义 (6)2.3.3寄存器地址 (7)2.3.4通讯协议示例以及解释 (7)3.安装使用 (11)3.1系统架构图 (11)3.1.1直接接电脑或者PLC (11)3.1.2网络传输使用 (13)3.2接口说明 (13)3.3协议调试(只适用于485输出型) (14)3.3.1使用上位机测试 (14)3.3.2使用串口调试助手调试 (15)4.配置连接透传云平台 (18)4.1485型传感器使用有线DTU连接透传云 (18)4.1.1透传云设置 (18)1.注册透传云 (18)2.新增并配置模板及数据点 (19)3.新增设备 (20)4.1.2硬件连接 (21)4.1.3软件配置 (21)4.2485型传感器使用无线DTU连接透传云 (24)4.2.1硬件连接 (24)4.2.2软件配置 (24)4.3模拟量传感器使用RTU连接透传云平台 (27)4.3.1硬件连接 (27)4.3.2软件配置 (27)4.4设备联调 (32)5.包装售后 (34)5.1产品包装清单 (34)5.2联系方式 (34)5.3质保与售后 (35)5.4免责声明 (35)1.产品简介1.1产品概述雨量传感器,外型小巧轻便,便于携带和组装,用于测量自然界降雨量,同时将降雨量转换为以开关量形式表示的数字信息量输出,以满足信息传输、处理、记录和显示等的需要。
可用于气象台(站)、水文站、农林、国防、野外测报站等有关部门,配合我公司自主研发生产的雨量记录仪来测量降水量、降水强度、降水时间等。
可为防洪、供水调度、电站水库水情管理提供原始数据。
1.2功能特点•感光探头灵敏度高•信号稳定,精度高•测量范围宽、线形度好•防水性能好、使用方便•便于安装、传输距离远等2.参数详情2.1外形尺寸图2.2基本参数参数技术指标测量范围≤30mm/min 测量精度0.2mm供电电源12V-24VDC 工作温度-30℃-80℃工作湿度0%RH-80%RH 响应时间<2s耗电<1W2.3通讯协议2.3.1通讯基本参数参数内容设备地址1通讯协议MODBUS RTU编码8位二进制数据位8位奇偶校验位无停止位1位错误校准CRC冗长循环码波特率出厂默认为9600bps可设置2400bps、4800bps、9600bps 2.3.2数据帧格式定义采用Modbus-RTU通讯规约,格式如下:初始结构≥4字节的时间地址码=1字节功能码=1字节数据区=N字节错误校验=16位CRC码结束结构≥4字节的时间地址码:具体地址,在通讯网络中是唯一的(出厂默认0x01)。
霍尔传感器电容传感器实验数据+图形
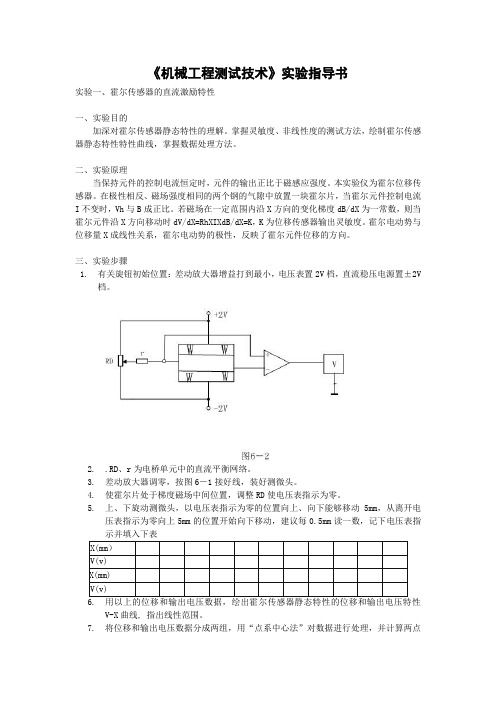
《机械工程测试技术》实验指导书实验一、霍尔传感器的直流激励特性一、实验目的加深对霍尔传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制霍尔传感器静态特性特性曲线,掌握数据处理方法。
二、实验原理当保持元件的控制电流恒定时,元件的输出正比于磁感应强度。
本实验仪为霍尔位移传感器。
在极性相反、磁场强度相同的两个钢的气隙中放置一块霍尔片,当霍尔元件控制电流I不变时,Vh与B成正比。
若磁场在一定范围内沿X方向的变化梯度dB/dX为一常数,则当霍尔元件沿X方向移动时dV/dX=RhXIXdB/dX=K,K为位移传感器输出灵敏度。
霍尔电动势与位移量X成线性关系,霍尔电动势的极性,反映了霍尔元件位移的方向。
三、实验步骤1.有关旋钮初始位置:差动放大器增益打到最小,电压表置2V档,直流稳压电源置±2V档。
2..RD、r为电桥单元中的直流平衡网络。
3.差动放大器调零,按图6-1接好线,装好测微头。
4.使霍尔片处于梯度磁场中间位置,调整RD使电压表指示为零。
5.上、下旋动测微头,以电压表指示为零的位置向上、向下能够移动5mm,从离开电压表指示为零向上5mm的位置开始向下移动,建议每0.5mm读一数,记下电压表指V-X曲线, 指出线性范围。
7.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏度值。
实验可见:本实验测出的实际是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
四、思考题1.为什么霍尔元件位于磁钢中间位置时,霍尔电动势为0。
2.在直流激励中当位移量较大时,差动放大器的输出波形如何?实验二、电容传感器的直流特性实验内容:加深对电容传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制电容传感器静态特性曲线,掌握数据处理方法。
实验步骤1.按图7-1差动放大器“+”、“-”输入端对地短接,旋动放大器调零电位器,使低通滤波器输出为零。
iVu Plus TG和彩色Gen2图像传感器安装说明说明书

快速启动向导简介本指南旨在帮助您设置和安装iVu Plus TG 和彩色 Gen2图像传感器。
有关编程、性能、故障排除、尺寸和附件的完整信息,请参阅 。
搜索p/n号179042以查看说明手册。
使用本文件的前提是熟悉相关行业标准和实践。
iVu 包括集成帮助。
通过集成触摸屏、远程触摸屏或Vision Manager PC 软件编程、修改和查看程序。
配置或运行iVu 不需要Vision Manager 。
使用Vision Manager PC 软件连接到iVu ,以远程控制设备。
连接到设备后,界面显示在传感器画面。
以与iVu显示器相同的方式使用该界面。
警告: 该产品不能用于人身防护不要使用该设备作为一个用于人身防护的传感装置。
这样做可能导致严重伤害或死亡。
该设备不包括自检冗余电路,所以不能用于人员安全的应用场合。
传感器故障或失灵会引起传感器输出状态的通电或断电异常。
注意:静电放电避免静电放电破坏传感器。
安装镜头和插拔电缆时,始终需要使用有效的方法防止静电放电。
功能和指示图1:功能1.电源LED绿色: 准备/电源红色(闪烁或常亮): 错误2.合格/失败LED绿色 (常亮): 合格 绿色(闪烁): 错误红色: 失败3.以太网I/O LED绿色: 已连接上 暗: 断开连接4.对焦窗口5.对焦窗口锁紧螺钉6.集成显示器(仅为集成显示器型号)注意:集成显示器型号,触摸屏显示器有一个塑料盖以保护显示器。
配置设备时卸下此盖。
不使用显示器时,请将显示器盖好以保护它。
安装说明安装iVuiVu 需要安装支架,支架可从Banner Engineering 获得,请参见.。
支架需要允许iVu 垂直于零件或可调角度安装。
1.将iVu 放置在支架上。
2.将三个M4 x 4 mm 螺钉(随附)穿过支架拧入iVu底部的安装孔中。
图2.安装支架安装孔iVu Plus TG 和彩色 Gen2 图像传感器Original Document 178442 Rev. F24 September 20191784423.拧紧所有三个螺钉。
第2章02超声波传感器(教学设计)-初中信息技术九年级同步教学设计+视频+图片(苏科版2018)
2.计算思维:通过分析超声波传感器的特点和应用场景,培养学生的计算思维能力,使学生能够运用所学知识解决实际问题。
3.数字化学习与创新:通过实操演示和项目制作,培养学生的数字化学习与创新能力,使学生能够运用所学知识进行创新实践。
内容逻辑关系
①发射:超声波传感器通过发射器产生超声波信号,这些信号以声速传播。
②接收:超声波传感器通过接收器接收反射回来的超声波信号。
③处理:超声波传感器对接收到的信号进行处理,提取有用信息,如距离、速度等。
2.超声波传感器的特点
①非接触式测量:超声波传感器通过发射和接收超声波信号进行测量,无需与被测物体直接接触。
③智能家居:超声波传感器可用于实现智能家居的安全和自动化控制。
4.超声波传感器的编程和调试
①编程:通过编程实现超声波传感器的基本功能和应用。
②调试:通过调试解决超声波传感器在编程和应用中遇到的问题。
5.超声波传感器的未来发展
①集成化:超声波传感器的发展趋势是集成化,以提高其性能和可靠性。
②智能化:超声波传感器的发展趋势是智能化,以实现更复杂的功能和应用。
4.信息社会责任:通过学习超声波传感器在生活中的应用,使学生能够理解信息技术对人类生活的影响,培养学生的信息社会责任。
重点难点及解决办法
1.重点:超声波传感器的工作原理
解决办法:通过视频和图片展示超声波传感器的工作原理,结合实例讲解,使学生能够直观地理解超声波传感器的运作过程。
2.难点:超声波传感器的应用
1.4超声波传感器的编程和调试
-介绍超声波传感器的编程和调试方法,如使用Arduino、Raspberry Pi等开发平台。
智能网联汽车技术基础最新版课件-项目二 智能网联汽车环境感知技术

2、激光雷达原理及应用认知
图2-2-1 Velodyne 激光雷达点云图
智能网联汽车环境感知技术
激光雷达采集到的物体信息呈现 出一系列分散的、具有准确角度和距 离信息的点,被称为点云。如图2-2-1 所示,为激光雷达工作过程中的点云 图。
2、激光雷达原理及应用认知
智能网联汽车环境感知技术
与传统雷达使用无线电波相比,LiDAR使用激光射线,其射线波长一般在 600~1000nm,远远低于传统雷达所使用的波长。因此,LiDAR在测量物体距离 和表面形状可达到更高的精准度,一般精准度可以达到厘米级。由于激光的传播 受外界环境影响较小,LiDAR能够检测的距离一般可达100m以上。
2、激光雷达原理及应用认知
智能网联汽车环境感知技术
图2-2-4单线激光雷达
但是,单线雷达只能平面式扫描,不 能测量物体高度,有一定局限性。目前, 主要应用于服务机器人身上,如扫地机器 人。在智能车上,单线激光雷达主要用于 规避障碍物、地形测绘等领域。
2、激光雷达原理及应用认知
图2-2-5多线激光雷达
几米。
低成本。夜间不受 影响。
会受天气条件限制 。只能探测到近距 离的物体。难以识
别出行人。
测距精度高、方向 性强、响应时间快 、不受地面杂波干
扰。 成本很高。不能全 天候工作,遇浓雾 、雨、雪等极端天
气无法工作。
不受天气情况和夜 间的影响。可以探 测到远距离(100 米以上)的物体。 成本较高。行人的 反射波较弱,难以 探测,需与视觉传 感器互补使用。
按载荷平台分类
机载激光雷达和车载激光雷达
按探测方式分类
直接探测激光雷达和 相干探测激光雷达
2、激光雷达原理及应用认知
光纤传感器原理与结构图
光纤传感器原理与结构图
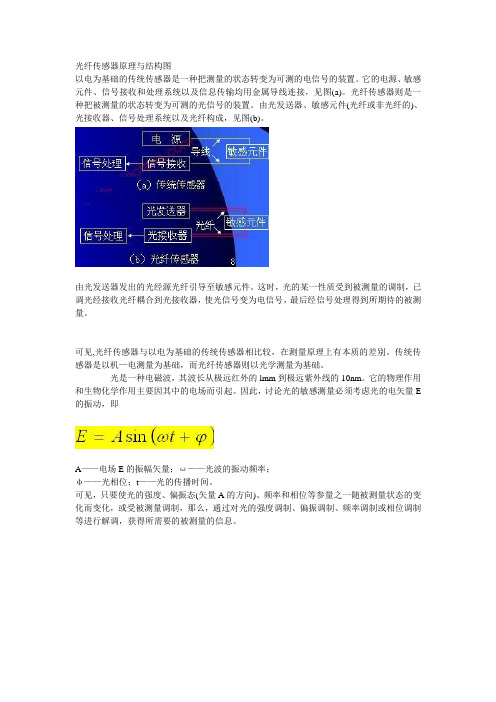
以电为基础的传统传感器是一种把测量的状态转变为可测的电信号的装置。
它的电源、敏感元件、信号接收和处理系统以及信息传输均用金属导线连接,见图(a)。
光纤传感器则是一种把被测量的状态转变为可测的光信号的装置。
由光发送器、敏感元件(光纤或非光纤的)、光接收器、信号处理系统以及光纤构成,见图(b)。
由光发送器发出的光经源光纤引导至敏感元件。
这时,光的某一性质受到被测量的调制,已调光经接收光纤耦合到光接收器,使光信号变为电信号,最后经信号处理得到所期待的被测量。
可见,光纤传感器与以电为基础的传统传感器相比较,在测量原理上有本质的差别。
传统传感器是以机—电测量为基础,而光纤传感器则以光学测量为基础。
光是一种电磁波,其波长从极远红外的lmm到极远紫外线的10nm。
它的物理作用和生物化学作用主要因其中的电场而引起。
因此,讨论光的敏感测量必须考虑光的电矢量E 的振动,即
A——电场E的振幅矢量;ω——光波的振动频率;
φ——光相位;t——光的传播时间。
可见,只要使光的强度、偏振态(矢量A的方向)、频率和相位等参量之一随被测量状态的变化而变化,或受被测量调制,那么,通过对光的强度调制、偏振调制、频率调制或相位调制等进行解调,获得所需要的被测量的信息。
应变式力传感器示意图课件
n 零漂:已粘贴的应变片,在温度保持恒定、试件 上没有应变的情况下,应变片的指示应变会随时 间的增长而逐渐变化,此变化就是应变片的零点 漂移。
n 蠕变:已粘贴的应变片,在温度保持恒定时,承 受某一恒定机械应变长时间的作用,应变片的指 示应变会随时间而变化。
n 当温度在-200℃--0℃范围内时,铂热电阻和温度 的关系为
当温度在0℃--850℃范围内时,铂热电阻和温度 的关系为
n 式中 t —摄氏温标下的温度值;
Rt—t℃时的阻值; R0—0℃时的阻值;
A— 常数,
B— 常数,
C— 常数,
n 2 铜热电阻传感特性 n 铜热电阻的温度系数比铂热电阻大,价格低,而
n 温度改变引起电阻变化的主要因素有二:其一是应 变片电阻丝的温度系数;其二是电阻丝材料与试件 材料的线膨胀系数不同。
n 5 应变极限
n 指当温度一定时,指示应变和真实应变的相对差值 不超过一定数值时的最大真实应变数值。一般规定 此差值为10%,即指示应变数值为真实应变的90% 时的真实应变值称为应变片的极限。
但是在输出结果中还存在始终等于同相输入Ui+
的另一项,这使得输出电压与差分输入电压呈
非线性关系。
n 图2-34为改进的差动放大电路。利用虚短和虚 断的概念,得到Uo的表达式为
n 令Z2=Z1,Z3=Zf
n 2.1.3 电阻应变片的主要特性
n 1 灵敏系数
n 灵敏系数为应变片的电阻相对变化与试件主应力 方向的应变之比。
n 电阻应变片的灵敏系数与单纯的电阻丝的灵敏系 数是不相同的,原因:
(1) 试件的形变是通过剪力传到敏感栅上的。
AEM FIC6 使用说明 中文版

AEM安装说明30-1910燃油点火控制器(F / IC6)警告:这是不安装挑战!使用F / IC应格外小心!如果你是新手,请AEM训练有素的调整店或致电800-423-00for技术援助。
您也可以访问AEM高性能电子论坛 注:任何因吴用导致发动机损坏AEM概不负责!该产品是在加利福尼亚州的法律仅用于赛车的车辆,不应该在公共道路上使用。
感谢您购买AEM F / IC。
在箱子里面,你会发现F / IC模块,通用线束,软件光盘,需要安装和调整F / IC通过一台笔记本电脑或PC的所有其他组件。
请参阅图1。
对于那些希望有一个即插即用安装,AEM已开始开发一些比较流行的应用程序的特定于应用程序的线束。
请访问F / IC产品的可用性和信息的AEM电子论坛()的部分。
套件内容:* F / IC模块*飞线线束*绕道插头*说明*软件CD* USB连接线*真空软管(3英尺)* T型接头图1。
套件内容入门F / IC连接的第一个步骤是,以确定哪些特性/功能需要和不需要。
F / IC有很多飞线,有46个非终止线。
乍一看,导线束是很吓人的。
但是,可以通过回答一些问题,关于你的车,你想要做F / IC,一些电线被淘汰。
在我们开始之前,我们必须了解两种类型的连接使用F / IC:TAP和INTERCEPT。
请参阅图2。
导线的连接图2。
线的连接INTERCEPT截取TAP塞子TO ENGINE 引擎CUT WIRE 剪断线您的车辆是否有一个的MAG或霍尔式曲轴传感器?MAG式传感器通常有两条线。
霍尔式传感器通常有三根线。
车辆只能有一个MAG或一个霍尔式曲轴传感器。
如果您的车辆有一个MAG传感器,霍尔传感器曲轴线被淘汰。
如果您的车辆有霍尔传感器则MAG感应线被淘汰。
如下面在图3中示出的曲轴传感器连接。
霍尔式曲轴CONNECTIOSENSOR传感器SIGNAL信号MAG式曲轴连接图3。
曲轴传感器连接您的车辆有一个还是两个凸轮传感器?如果你的车有一个凸轮传感器,两个“CAM2”霍尔线和四个”CAM2” MAG线被淘汰。
典型线阵CCD图像传感器ppt课件
第六讲
典型线阵CCD图像传感器
不同的线阵CCD具有不同的特点,适用于不同的 应用场合。
本章从应用的角度介绍几种典型线阵CCD的基本 结构、特性参数、驱动方式和应用特点。
TCD1209D优点:速度快;灵敏度高;动态范围宽; 像敏单元不均匀性好;功耗低;光谱响应范围宽
1) 光谱响应特性
光谱响应的峰值波长为550nm; 短波响应在400 nm处大于70%; 光谱响应的长波限在1100nm; (Si基底)
像敏单元不均匀性典型值为3%,双沟道线阵CCD达不到。
50%饱和曝光量作用下:
在的D0~D12。它们只是虚设的单元(在移位寄存器中有12组对应单元) 2)遮蔽的27个PD的作用?
获得暗电流等信息用于对有效信号处理 3)根据原理图请问CCD模拟移位寄存器的驱动电极至少多少?
(2048+27+13)×2 = 4176个。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
2 、TCD1209D的基本工作原理
TCD1209D的驱动脉冲波形图(掌握)
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
TCD1209D五路驱动脉冲组成及作用:
①转移脉冲SH(沟通/阻隔 PD 和 CCD;控制光积分时间) ②驱动脉冲CR1 (配合CR2把信号电荷从CCD右向左移动) ③驱动脉冲CR2(其中CR2B代表CCD移位寄存器的最后一个电极) ④复位脉冲RS(清除上一次未来得及转移走留在输出二极管中的电荷) ⑤缓冲控制脉冲CP(过滤掉输出信号的尖脉冲噪声)
霍尔传感器、磁性传感器原理图PCB图及例程

霍尔传感器使用说明书简要说明:一、长尺寸:32mm X宽11mm X高20mm二、主要芯片:LM393、3144霍尔传感器三、工作电压:直流5伏四、特点:1、具有信号输出指示。
2、单路信号输出。
3、输出有效信号为低电平。
4、灵敏度可调(精调)。
5、有磁场切割就有信号输出6、电路板输出开关量!(可直接接单片机)7、可用于电机测速/位置检测等场合适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【图片展示】【与单片机连接测试程序】/********************************************************************汇诚科技实现功能:此版配套测试程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ /******************************************************************** 说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平*********************************************************************/ #include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************I/O定义*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************延时函数*********************************************************************/ void delay()//延时程序{uchar m,n,s;for(m=20;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(DOUT==0)//当浓度高于设定值时,执行条件函数{delay();//延时抗干扰if(DOUT==0)//确定浓度高于设定值时,执行条件函数{LED=0; //点亮P1.0口灯}}}}/********************************************************************结束*********************************************************************/【与单片机连接测速参考程序】/********************************************************************汇诚科技实现功能: 电机转速表设计使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚unsigned char code digit[ ]={"0123456789"}; //定义字符数组显示数字unsigned int v; //储存电机转速unsigned char count; //储存定时器T0中断次数bit flag; //计满1秒钟标志位/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delay(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
吉利帝豪电路图(ECM 传感器)
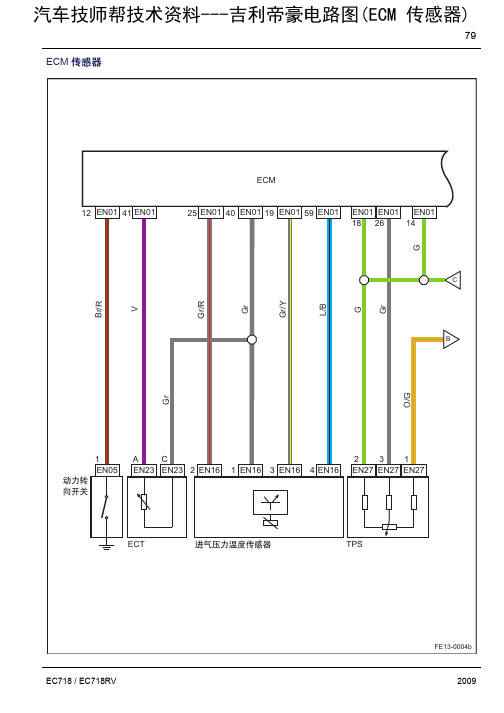
ECM传感器线束连接器名称页码EN01发动机控制模块线束连接器25 EN05动力转向开关线束连接器26 EN16进气压力温度传感器线束连接器26 EN23发动机冷却液传感器线束连接器26 EN27节气门位置传感器线束连接器26连接点说明页码B传感器至ECM内部低参考电路81/85 C传感器5伏参考电源85氧传感器线束连接器名称页码CA27接发动机线束连接器21 EN01发动机控制模块线束连接器25 EN02前氧传感器线束连接器26 EN03后氧传感器线束连接器26 EN28接机舱配电盒线束连接器26连接点说明页码A主继电器电源输出77 B传感器至ECM内部低参考电路79车速传感器线束连接器名称页码CA27接发动机线束连接器21 EN01发动机控制模块线束连接器25 EN04接仪表线束连接器25 EN21车速传感器线束连接器26 EN28接机舱配电盒线束连接器26 IP02组合仪表至多功能仪表线束连接器31 IP48接发动机线束连接器31 P2发动机舱接地60连接点说明页码A主继电器电源输出77ECM点火系统线束连接器名称页码CA02接仪表线束2线束连接器20 CA27接发动机线束连接器21 EN01发动机控制模块线束连接器25 EN08爆震传感器线束连接器26 EN15凸轮轴位置传感器线束连接器26 EN19点火线圈1线束连接器26 EN20点火线圈2线束连接器26 EN26发动机转速传感器线束连接器26 EN28接机舱配电盒线束连接器26 IP05接室内保险丝、继电器盒线束连接器31 IP07接发动机舱线束连接器31 C01室内保险丝盒背面连接器15连接点说明页码B传感器至ECM内部低参考电路79 C传感器5伏参考电源79ECM设备控制线束连接器名称页码CA27接发动机线束连接器21 EN01发动机控制模块线束连接器25 EN10VVT电磁阀线束连接器26 EN17怠速控制阀线束连接器26 EN24碳罐电磁阀线束连接器26 EN28接机舱配电盒线束连接器26连接点说明页码A主继电器电源输出77 EN01-60至压缩机继电器97。
工程测试-第六章位移测量
性能稳定可靠,利用应变片和 弹性体结合测量角位移
自整角机 旋转变压器
360° 360°
±0.1°~± 7°
2′~5′
±0.5%
小角度时 0.1%
对环境要求低,有标准系列, 使用方便,抗干扰能力强,性 能稳,可在1200r/min下工作, 精度低,线性范围小
一.回轴轴误差运动的 测量
○ 回转轴误差运动是 指在回转过程中回 转轴线偏离理想位 置而出现的附加运 动。
○ 径向误差运动的常 用测量方法
图 双向测量 法时的位移信 号分析
—基圆发生器 图 双向测量法
—位移测量仪;
—位移传感器 ;
T—位移传 感器;M— 位移测量仪; R—基圆发 生器; Mu—乘法 器
部分测量角位移的传感器的性能及特点。
型式
测量范围
精确度
线性度
特点
滑线变阻式
0°~360°
±0.1%
±0.1%
结构简单,测量范围广,存在 接触摩擦,动态响应差
变阻器
0~60转
±0.5%
差动变压器式
0°~±120 °
(0.2~2.0) %
应变计式
±180°
1%
±0.5% ±0.25%
耐磨性好,阻值范围宽,接触 电阻和噪声大,附加力矩较大
微动同步器
±5°~±4 0°
(0.4~1) %
±0.05%
分辨力高,无接触,测量 范围小,电路较复杂
电容式
70°
25″
圆感 编 码 器
接触 式
光电 式
0°~360 °
0°~360 °
0°~360 °
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
02传感器图组
※<电阻应变式传感器>
电阻应变式称重传感器
电位计式传感器
压阻式压力传感器
半导体应变片
5
※<气体传感器>
红外气体传感器
硫化氢气体固体氧化物传感器
红外毒气系列--甲烷红外线气体传感器
5
※<湿度传感器>
5※<电感式传感器>
圆柱型电感式接近开关
5
※<电容式传感器>
电容式指纹传感器电容式单轴倾角传感器
电容式压力变送器和传感器电容式涡街流量传感器
5※<压电式传感器>
压电加速度传感器
5※<磁电式传感器>
磁电式转速传感器
5
※<光电式传感器>
光纤传感器
热释红外传感器
红外温度传感器
CCD图象传感器
5※<磁敏传感器>
高转速磁敏转速传感器
霍尔传感器
5※<数字式传感器>
光栅埋入式应变传感器
光栅传感器
磁栅传感器
5※<其他传感器>
超声波距离传感器
微波测湿传感器。