基于单片机的滤波器系统
单片机fir滤波器算法的实现

单片机fir滤波器算法的实现单片机是一种常用的嵌入式系统电路,可以通过编程控制其功能。
其中之一的应用就是实现滤波器算法,用于信号处理和数据分析。
FIR滤波器是一种常见的数字滤波器,通过有限长度的冲激响应函数来处理输入信号。
在本文中,我将探讨单片机中FIR滤波器算法的实现。
1. FIR滤波器简介FIR滤波器,全称为有限冲激响应滤波器(Finite Impulse Response Filter),它的输出只依赖于当前和过去的输入样本,不依赖于未来的输入样本。
FIR滤波器常用于去除信号中的噪声、平滑信号、滤除频率特定的组分等应用。
2. FIR滤波器算法原理FIR滤波器的算法原理是基于信号与滤波器的卷积运算。
具体来说,FIR滤波器将输入信号与一组系数进行加权求和,得到输出信号。
这组系数称为滤波器的冲激响应函数,决定了滤波器的频率特性和幅度响应。
3. 单片机中的FIR滤波器实现步骤1) 定义滤波器的系数。
根据需要设计陷波器或带通滤波器等,确定系数的数量和取值。
2) 获取输入信号样本。
通过单片机的模数转换器(ADC)获取输入信号的模拟样本值。
3) 实现滤波器算法。
将输入信号样本与滤波器系数进行加权求和,得到输出信号样本。
4) 输出滤波后的信号。
通过单片机的数模转换器(DAC)将输出信号样本转换为模拟信号输出。
4. 单片机中FIR滤波器算法的实现要点- 系数选择:根据所需的频率响应和滤波器类型,选择适当的系数。
常见的系数设计方法包括窗函数法、最小二乘法等。
- 数据类型选择:根据单片机的数据类型和精度要求,选择适当的数据类型表示滤波器系数和输入/输出信号。
- 内存管理:考虑到单片机的资源限制,合理管理存储器来存储滤波器系数和中间计算结果。
- 实时性要求:根据实时性要求,合理选择单片机的工作频率和计算速度,确保滤波器算法能够满足实时处理的需求。
5. 我的观点和理解FIR滤波器是一种常用的滤波器算法,其在单片机中的实现能够实现信号处理和数据分析的功能。
单片机众数滤波

单片机众数滤波
单片机中的众数滤波是一种数字信号处理技术,旨在通过识别数据集中的众数(出现频率最高的数值)来消除噪声和异常值,从而获得更平滑和可靠的数据。
在实际应用中,众数滤波通常用于处理传感器数据或其他采样数据,以提高系统的稳定性和准确性。
以下是单片机中众数滤波的基本原理和实现步骤:
1. 原理:众数是数据集中出现频率最高的数值。
通过识别众数,可以消除由于噪声或异常值引起的波动,从而得到更加稳定和真实的数据。
2. 步骤:
- 数据采集:首先,单片机需要采集一组数据,这些数据可能包含噪声或异常值。
- 数据处理:对采集到的数据进行排序,然后统计每个数值的出现次数。
- 计算众数:确定出现频率最高的数值,即众数。
- 滤波处理:将众数作为滤波后的输出值,用于替代原始数据集中的值。
3. 优缺点:
- 优点:众数滤波简单易实现,能够有效消除一些噪声和异常值的影响,适用于一些特定场景下的数据平滑处理。
- 缺点:众数滤波可能无法处理连续变化或频繁波动的数据,对于某些数据集合并不适用。
4. 应用场景:
- 适用于需要快速处理的实时数据,如传感器数据采集。
- 可用于简单的信号处理场景,要求对实时性和精度要求不高的情况下。
基于单片机的程控滤波器设计要点
摘要在电子电路中,滤波器是不可或缺的部分,其中有源滤波器更为常用。
一般有源滤波器由运算放大器和RC元件组成,对元器件的参数精度要求比较高,设计和调试。
也比较麻烦。
美国Maxim公司生产的可编程滤波器芯片MAX270可以通过编程对各种低频信号实现低通、高通、带通、带阻以及全通滤波处理,且滤波的特性参数如中心频率、品质因数等,可通过编程进行设置,电路的外围器件也少。
本文设计并实现了由MAX270构成的程控滤波器电路设计和实现。
单片机AT89S52是控制程序的控制过滤器的核心。
通过单片机控制继电器的吸合来控制增益电阻的连接进而实现了增益的0dB到60dB每10dB步进可调;通过单片机控制二阶低通程控滤波器MAX270,完成了在-3dB时截止频率fc在1kHz~20kHz范围内可调的低通滤波器的设计,调节截止频率步进为1kHz,并用LCD来显示设置参数。
应用Matlab计算椭圆滤波函数的传递函数,建立电路网络,设计出了四阶椭圆低通滤波器。
关键词:程控滤波器可编程滤波器芯片单片机ABSTRACTIn the electronic circuit, the filter is the indispensable part. Especially the active filter is used more commonly. Generally the active filter is composed of the operational amplifier and the RC part. Its requirement to the accuracy of the device's parameter is quite high, and the design and the debugging are also quite troublesome.The filter chip MAX262 which produced by American Maxim Corporation is capable of achieving low-pass, high-pass, band-pass, band elimination to each kind of low-frequency signal through programming, and the filter's characteristic parameter like center frequency, the quality factor and so on may set through programming, and the periphery component of electric circuit are also few. This article design and completed the design the design and realize of the program control filter circuit which make up of the MAX270.Monolithic integrated circuit AT89S52 is the control core of the program control filter. Controlled by the microcontroller to control relays pull the gain resistor connected in turn to achieve a gain of 0dB to 60dB 10dB step adjustable each; second-order low-pass through the SCM programmed filter MAX270, when completed in the-3dB cutoff frequency fc at 1kHz ~ 20kHz range adjustable low-pass filter design, cut-off frequency adjustment step is 1kHz, using the LCD to display the configuration parameters. Application of Matlab computing elliptic filter function of the transfer function, the establishment of the circuit network, to design a fourth-order elliptic low-pass filter.Key words:Program control Filter Programmable filter chip SCM目录1 绪论 (1)1.1 滤波器的发展 (1)1.2 课题研究的意义 (1)2 系统设计 (3)2.1 滤波器相关知识 (3)2.1.1 滤波器的分类 (3)2.2 单片机相关知识 (4)2.2.1 单片机的产生与发展 (4)2.3 系统方案设计 (6)2.3.1设计要求 (6)2.3.2 各模块方案的选择 (6)2.3.3 最终方案 (7)2.4 理论分析与计算 (10)3 硬件设计 (13)3.1 放大器模块 (13)3.2 单片机控制滤波器模块 (14)3.3 操作及显示模块 (18)4 软件设计 (20)4.1 开发软件及环境简介 (20)4.1.1 Keil (20)4.1.2 Proteus (20)4.2 系统主要程序 (21)5 系统测试 (23)5.1 指标测试 (23)5.2 误差分析 (23)5.3 功能实现 (24)结论 (26)谢辞 (27)参考文献 (28)附录 (29)1 绪论1.1 滤波器的发展从广义上讲,任何对某些频率(相对于其他频率来说)进行修正的系统称为滤波器。
基于proteus的模拟信号数字滤波及动态波形输出

智能仪器基础与设计设计报告学院(系):机电工程学院专业:测控技术与仪器学生:指导教师:完成日期 : 2015 年 1 月智能仪器基础与设计基于单片机C语言编程及LCD液晶显示器的数字滤波显示系统设计Design of Digital Filter and Display System Based on Clanguage Programming and Single-Chip Computers基于单片机C语言编程及LCD液晶显示器的数字滤波显示系统设计[摘要]本次实验设计的主要内容是在Proteus仿真环境下,借助单片机和c 语言编程,实现对模拟信号的采集、滤波以及对滤波后信号的LCD动态显示。
本次设计主要采用了三中滤波方式:平均值滤波、中位置滤波、递推平均滤波。
应用的主要器件有:MCS-51单片机,TLC549 8位串行AD,KS0108控制的12864 LCD。
通过对叠加了噪声信号的模拟信号的模数转换实现信号采集,在单片机内部采用函数滤波滤出信号上面叠加的高频噪声,最后通过单片机控制两个LCD分别输出采集到的叠有噪声的信号和滤波后的结果。
[关键字]数字滤波 LCD动态显示 MCS-51 TLC549 KS0108 12864[Abstract]This experiment design is mainly based on the environment of Proteus 8.0, single-chip computer and C language programming. This design managed to collect analog signal, filter signal and dynamic display signal on LCD. In this design, we used 3 diffident filter methods: mean filter; medium filter; recursive average filtering. The devices we used are: MCS-51 single-chip computer; 8-bit serial ADC TLC549; LCD 12864 with its driver KS0108.[Keyword]Digital filtering LCD dynamic display MCS-51 TLC549 KS0108 12864目录1 引言 (5)1.1课题背景介绍 (5)2 各部分器件简单介绍 (6)2.1 MCS-51单片机 (6)2.2 AD转换器TLC549 (7)2.3 LCD液晶显示器12864 (9)3 数字滤波器设计 (10)3.1 数字滤波原理介绍 (10)3.2 单片机电路 (18)3.3 数据采集电路 (19)3.4 显示电路 (19)3.5 总电路 (20)4 程序设计 (21)4.1程序流程图 (21)4.2 总程序关键点解析 (22)4.3 LCD12864驱动子程序 (23)4.4 画坐标子程序 (25)4.5 坐标图字模 (25)4.6 主程序 (27)参考文献 (31)附录 (31)1 引言1.1课题背景介绍1.1数字滤波器的研究背景与意义当今,数字信号处理技术正飞速发展,它不但自成一门学科,更是以不同形式影响和渗透到其他学科:它与国民经济息息相关,与国防建设紧密相连;它影响或改变着我们的生产、生活方式,因此受到人们普遍的关注。
基于TMS320C54X的IIR滤波器的设计
百度文库- 好好学习,天天向上222学科分类号:___________ 湖南人文科技学院专科学生毕业设计题目名称:基于TMS320C54X的IIR滤波器的设计学生姓名:郭坚学号05306123系部:通信与控制工程系专业年级:05级电子信息工程技术指导教师:杨玲2008年5 月18 日摘要作为DSP领域内的产品滤波器,在近代电信设备和各类控制系统中应用极为广泛,IIR滤波器由于具有结构简单、运算量小的特点,因而得到了广泛的应用。
本文主要分4大章节,第一章主要介绍了滤波器的发展历程,滤波器的分类,和DSP的发展与应用。
第二章是系统总体方案的论证与选择,通用型单片机数字滤波器的设计,DSP芯片的滤波器的设计,CPLD的数字滤波器的设计。
最后确定了用DSP来设计滤波器。
第三章节主要介绍了TMS320C54XDSP的基本结构,包括CPU,存储器,指令系统,在片外围电路,程序储存器,数据存储器,I/O存储器,中央处理单元CPU 基本组成和寻址方式。
IIR数字滤波器的来源以及特点。
最后第四章通过对IIR滤波器结构的分析,使得在TMS320C54XDSP芯片上编程实现。
关键字:IIR数字滤波器;滤波器设计;DSPAbstractAs a DSP products in the areas of filters, in modern telecommunications equipment and various types of control system of application extremely wide, IIR filter as a simple structure, the characteristics of a small amount of computing, which has been widely used. In this paper, the four major sub-sections, the first chapter introduces the development of the filter, filter the classification, and the development and application of DSP. Chapter II system is the system overall programme evaluation and selection, general-purpose MCU digital filter design, DSP chips filter design, CPLD of the digital filter design. Finalized by the DSP to design filter. The third chapter introduces the basic structure of theTMS320C54XDSP, including CPU, memory, command systems, in-the external circuit, stored procedures, data storage, I / O memory and central processing units CPU addressing the basic composition and form. IIR digital filter and the characteristics of the source. The final chapter IV of IIR filter through the analysis, makes the TMS320C54XDSP chip programming.Keyword: IIR digital filter; filter design; DSP目录摘要 (I)ABSTRACT (II)第一章绪论 (1)滤波器的发展历程 (1)滤波器的分类 (2)DSP芯片的发展与应用 (2)论文结构 (3)第二章系统总体方案的论证与选择 (5)基于单片机数字滤波器的设计 (5)基于DSP芯片的滤波器的设计 (6)DSP实现的优点与缺点 (6)的选择与简介 (6)基于CPLD的数字滤波器的设计 (7)方案的选择 (8)第三章 TMS320C54XDSP结构、原理及IIR 滤波器设计原理 (9)3.1TMS320C54X的主要特性 (9)CPU (9)存储器 (10)在片外围电路 (16)C54x提供的几类寻址方式 (16)中断系统 (18)3.2滤波器的设计原理 (21)数字滤波器的理想幅频 (21)IIR滤波器的特点 (22)IIR数字滤波器的设计 (23)第四章系统硬件设计和软件设计 (26)系统硬件的设计 (26)DSP中延时的实现方法 (26)系统的软件设计 (28)第五章总结 (31)参考文献 (32)第一章绪论滤波器的发展历程凡是有能力进行信号处理的装置都可以称为滤波器。
单片机 fir滤波器算法实现

单片机 FIR 滤波器算法实现1. 引言FIR(Finite Impulse Response)滤波器是一种常见的数字滤波器,它在信号处理中起到了重要的作用。
本文将介绍单片机上如何实现 FIR 滤波器算法。
2. FIR 滤波器原理FIR 滤波器是一种线性时不变(LTI)系统,其输出信号是输入信号与滤波器的冲激响应进行卷积运算得到的。
FIR 滤波器的冲激响应是一个有限长度的序列,因此称之为有限脉冲响应滤波器。
FIR 滤波器的输入输出关系可以表示为以下公式:y[n] = b[0]*x[n] + b[1]*x[n-1] + b[2]*x[n-2] + ... + b[N]*x[n-N]其中,y[n] 是输出信号,x[n] 是输入信号,b[0] 到 b[N] 是滤波器的系数。
3. 单片机上的 FIR 滤波器实现在单片机上实现 FIR 滤波器算法需要以下步骤:3.1. 定义滤波器的系数首先需要定义 FIR 滤波器的系数。
系数的选择决定了滤波器的特性,可以根据具体的需求进行设计。
常见的系数设计方法包括窗函数法、频率采样法等。
3.2. 定义输入输出缓冲区为了实现滤波器的运算,需要定义输入和输出的缓冲区。
输入缓冲区用于存储输入信号的历史数据,输出缓冲区用于存储滤波器的输出结果。
3.3. 实现滤波器算法根据 FIR 滤波器的原理,可以使用循环结构实现滤波器的算法。
具体的实现过程如下: 1. 读取输入信号 x[n]; 2. 将输入信号保存到输入缓冲区; 3. 使用滤波器的系数和输入缓冲区的数据进行卷积运算,得到输出信号 y[n]; 4. 将输出信号保存到输出缓冲区; 5. 更新输入缓冲区的数据,将最新的输入信号放到缓冲区的开头; 6. 重复步骤 1 到步骤 5,直到处理完所有的输入信号。
3.4. 实现滤波器的输入输出接口为了方便使用滤波器,可以实现输入输出接口,使得用户能够方便地输入输出信号。
输入接口可以从传感器、外部设备等获取输入信号,输出接口可以将输出信号发送到显示器、存储设备等。
单片机中IIR滤波器的实现

单片机中(C语言)IIR滤波器的实现转载原文参见https:///qq_21905401/article/details/53894517 IIR是无限长单位脉冲响应数字滤波器,其系统对应函数有如下形式:在知道滤波器相应的系数b[],a[]后可根据相应的差分方程,完成对数据的滤波,而滤波器的系数可以通过Matlab滤波器设计和分析工具箱Filter Design&Analysis Tool求得,下面以一个IIR三阶低通滤波器为例,介绍C语言IIR滤波器的实现方法:1、计算滤波器的系数根据信号的采样频率以及低通滤波器的截止频率,通过Matlab工具箱求得滤波器的系数b和a。
如信号采样率为f=400Hz,低通滤波器的截止频率fc=60Hz:Matlab中Start→ToolBoxes→Filter Design→Filter Design & Analysis Tool(fdatool)在Filter Design & Analysis Tool,输入滤波器的相应指标,点击“Design Filter”设计滤波器。
如下图所示:通过Analysis→Filter coefficients查看所设计滤波器系数:响应函数:2、差分方程C语言实现根据相应函数得到差分方程:a[0]*y[i]=Gain*(b[0]*x[i]+b[1]*x[i-1]+b[2]*x[i-2])-a[1]*y[i-1]-a[2]*y(n-2)其中Gain=0.146747,b[]={1,2,1},a[]={1,-0.837000,0.42398},x[i]为输入信号,y[i]为滤波后信号。
C语言实现代码如下:B[0]=1;B[1]=2;B[2]=1;A[0]=1;A[1]=-0.837000;A[2]=0.42398;Gain=0.146747;w_x[0]=w_x[1]=w_x[2]=0;w_y[0]=w_y[1]=w_y[2]=0;for(int i=0;i<len;i++){w_x[0]=x[i];w_y[0]=(B[0]*w_x[0]+B[1]*w_x[1]+B[2]*w_x[2])*Gain-w_y[1]*A[1]-w_y[2]*A[2];y[i]=w_y[0]/A[0];w_x[2]=w_x[1];w_x[1]=w_x[0];w_y[2]=w_y[1];w_y[1]=w_y[0];}也可以使用如下代码:w[0]=w[1]=w[2]=0;for(int i=0;i<len;i++){w[0]=A[0]*x[i]-A[1]*w[2]-A[2]*w[2];y[i]=(B[0]*w[0]+B[1]*w[1]+B[2]*w[2])*Gain;w[2]=w[1];w[1]=w[0];}注意:在滤波之前,需要将系数w_x[]、w_y[]、w置零。
外文文献翻译(基于单片机的数字滤波器设计
毕业设计(论文)外文文献翻译院系:信息工程学院年级专业:电子信息工程姓名: 装化学号: 20122450236附件:digital filter design外文文献:digital filter designAbstract:With the information age and the advent of the digital world, digital signal processing has become one of today's most important disciplines and door technology。
Digital signal processing in communications,voice,images, automatic control, radar, military,aerospace,medical and household appliances,and many other fields widely applied. In the digital signal processing applications,the digital filter is important and has been widely applied.Keyword:SCM; Proteus, C language;Digital filter1、figures Unit on :Analog and digital filtersIn signal processing,the function of a filter is to remove unwanted parts of the signal,such as random noise, or to extract useful parts of the signal, such as the components lying within a certain frequency range。
基于单片机的UHF电调滤波器的实时调谐设计
1 引 言
随 着 通 信 事 业 的 发 展 , 信 设 备 的数 量 急 剧 增 加 , 互 通 相 之 间 的 干 扰 日益 严 重 。 了 使 多 部 通 信 机 在 很 近 的 距 离 内邻 为 近 的 频 率 而 互 不 干扰 . 效 方 法 就 是 在 接 收 机 的输 入 端 和 发 有
a t l h e in o e l i u i g UHF ee t c l u a l l r b s d Ol sn l h p c mp tr i gv n An h ri e te d sg fa r a— me t nn c t lcr al t n b e f t a e i i g e c i o u e s ie . d t e i y i e h r wae sr cu e d a r m n rv r , ee t n u i cr u t e i n a d f w d a r m r lo s o . a d r tu t r i g a a d d i e s d t ci nt i i d sg n o i g a a e as h wn o c l Ke r s c mmu ia in; f tr s ge c i y wo d : o nct o i e ; i l h p; se p n trh g — u l y n ro — a d f tr f co ; c mmu ia in l n t p ig moo / i h q ai a r w b n l a tr t ie o nc t o
中 图 分 类 号: P 7 +2 T 23.
De i n o e ltm e t ni g o sg fr a —i u n fUHF lc rc ly t na l it r ba e n M CU e e t ia l u b e fle s d o
单片机的可控放大器程控滤波器设计
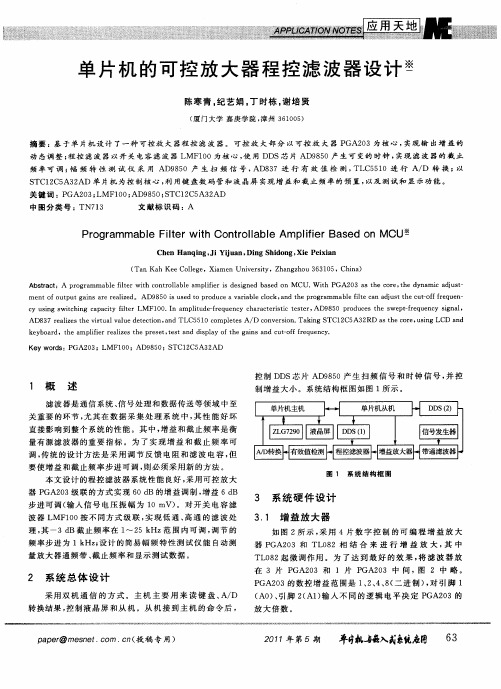
AD / 转换M 有效值检测 H 程控滤波器 H增益放大器H 带通滤波器
单 片 机 的可 控 放 大 器 程 控 滤 波器 设计
陈 寒 青 。 艺 娟 , 时 栋 。 培 贤 纪 丁 谢
( 门大 学 嘉 庚 学 院 , 州 3 1 0 ) 厦 漳 6 0 5
摘 要 :基 于 单 片机 设 计 了一 种 可控 放 大 器程 控 滤 波 器 。 可 控 放 大 部 分 以 可控 放 大 器 P GA2 3为核 心 , 0 实现 输 出增 益 的 动 态调 整 ; 控 滤 波 器 以 开 关 电容 滤 波 器 LMF 0 程 1 0为核 心 , 用 DDS芯 片 AD9 5 使 8 0产 生可 变 的 时钟 , 实现 滤 波 器 的 截 止
AD8 7 rai st evru l au ee t n a dTL 5 0c mpee D o v rin Ta igS 3 e l e h it a led tci , n C5 1 o ltsA/ c n e s . kn TC1 C5 2 z v o o 2 A3 RD st ec r , sn a h o e u igLCD a d n
Ch nHa qn ,i u n, n hd n , eP iin e n ig J YU a DigS io g Xi exa
( n Ka e Co lg ,Xim e ie st ,Z a g h u 3 3 0 ,Ch n ) Ta h Ke l e e a n Un v r i y h n zo 6 1 5 i a
量 有 源 滤 波 器 的重 要 指 标 。 为 了 实 现 增 益 和 截 止 频 率 可
制 增 益 大 小 。 系 统结 构 框 图 如 图 1所 示 。
基于单片机的频率测量的几种实用方法
低通滤波器, 当采 用 这 种 模 拟 滤 波 器 来 抑 制 低 频 干 扰时, 要求滤波器有较大的时间常数和高精度的 Q9 网络, 增 大 时 间 常 数 有 求 增 大 ! 值, 其漏电流也随 之增大, 从而降 低 了 滤 波 效 果。 而 采 用 数 字 滤 波 算 则能很好的克服上述模 法来实现动 态 的 Q9 滤 波, 拟滤波器的缺点。在模拟常数要求较大的场合这种 方法显得更为实用, 一阶惯性滤波算法对于周期干 扰具有良好的抑制 作 用, 其不足之处是带来了相位 滞后, 导致灵敏 度 低。 同 时 它 不 能 滤 除 频 率 高 于 采 样频率二分之一 (称 为 奈 奎 斯 特 频 率) 的 干 扰 信 号。 例如采样频率 为 %"":S, 则 它 不 能 滤 除 !":S 以 上 的 干扰信号。对于高 于 奈 奎 斯 特 频 率 的 干 扰 信 号, 应 该采用模拟滤波器。假设 " 为 输 入, # 为滤波后的 输出值, 则其公式为: $ % & ’ ! ! ( % )(% * ’ ) ! $% * % 式中 ’ 为与 Q9 值有关 的 一 个 参 数, 当 采 样 间 隔 "C 足够小时, 。 ’ T " C( U Q9) 下面是实现一阶惯性滤波算法的程序。 U ! 为加快程序 处 理 速 度 假 定 基 数 为 %"" , ’T " V %"" ! U W A6MD76 I !"
算术平均滤波法 算术平均滤波法适用于对一般的具有随机干扰
的信号进行滤波。这种信号的特点是信号本身在某 一数值范围附近上下波动, 如测量流量、 液位时经常 遇到这种情况。 算术平 均滤波 法是 要按输 入的 = 个 采样数 据, 寻找这样一个 $ , 使得 $ 与 各 个 采 样 值 之 间 的 偏 差 的平方和最小。 在编写算术平 均 滤 波 法 程 序 时 严 格 注 意 两 点: 一是对于定时测量, 为了减小数据的存储容量, 可对 测得的值直接进行计算, 但由于某些应用场合, 为了 加快数据测量的速度, 可采用先测量数据, 并存放在 存储 器 中, 测 完 = 点 后, 再对 = 个数据进行平均值 计算。二是选取适 当 的 数 据 格 式, 也就是说采用定 点数还是采用 浮 点 数。 采 用 浮 点 数 计 算 比 较 方 便, 但计算时间较长, 采用定点数可加快计算速度, 但必 须考虑累加 时 是 否 产 生 溢 出。 例 如 数 据 为 1D 位 二 进制 定 点 数 时, 采 用 双 字 节 运 算, 当 = ; D 时, 就可 能产生溢出。 下面是实现算术平均滤波法的程序。 9 0()*,( = 15
基于单片机高阶窄带数字滤波器的设计

专 题 论 述
基于单片机高阶窄带数字滤波器的设计
■ 武汉大学 闫 华 光 蔡 伟 黄 祥 伟 周文 俊
引
言
在 现 代 智 能 仪 器信 号 分 析 、 处 理 和 识 别 中 . 经
^ = _ ( ed d ) [ e )'o ( JJ
快 速 算 法 , 节 约 存 储 空 间和 运 算 量 c 目 前 , 已在 接 地
为改 善 F R滤 波 器性 能 , 要 求窗 函 数 满足 要 求 : I 主 瓣 宽 度 尽可 能 地 窄 , 以 获 得 较 窄 的 过 渡 带 ;旁 瓣 相 对 于 主 瓣 尽 可 能 地 小 , 数 量 尽 可 能 地 少 也 即能 量 集 中 在 主 瓣 中 。 这 样 , 就 可 以减 小 肩 峰 和 余 振 , 提 高 阻 带 衰 减 。 这 两 项 要 求 不 可 能 同 时 得 到 最 佳 常 用 的 窗 函 数 是 在 这 两 个 因 素 之 间 取 得 适 当 的 折 衷 :增 加 主瓣 宽 度 以换 取 旁 瓣 的 抑 制 。 如 果 选 用 一 个 窗 函 数 的 主 要 目 的 是 为 了 得 到 较 锐 的 截 止 , 就 应 选 用 主瓣 较 窄 的 窗 函 数 , 这 样 .在 通 带 中 将 产 生 一 些 振 荡 在 阻 带 中 会 出 瑚 显 著 的 波 纹 ;如 果 主 要 目 的 是为 了得到平 坦 的幅度 响应和 较小 的阻带 波纹 , 这 时 选 用 的 窗 函 数 的 旁 瓣 幅 值 就 要 较 小 , 但 所 设 计 的 F R 滤 波 器 的 截 止 锐 度 就 不 够 各种 窗 函 数 的 性 I 能 比 较 如 表 1所 列 。
H ( = ∑ ()。 de ne。 拥
单片机 一阶滤波器 c语言程序

单片机一阶滤波器 c语言程序下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!单片机一阶滤波器C语言程序概述在嵌入式系统中,滤波器是一种常见的信号处理器件,用于去除信号中的噪声或者其他干扰。
用51单片机实现FIR数字低通滤波器
安电子科技大学出版社, 2008.5. [6] 李广弟.单片机基础 [ (第三版)M].北京: 北京航空航天大学 出版社, 2007.6. [7] 谭浩强 .c 程序设计 [ (第三版)M].北京: 清华大学出版社, 2005.
—— 科协论坛 ・ 2010 年第 9 期 (下) ——
91
90
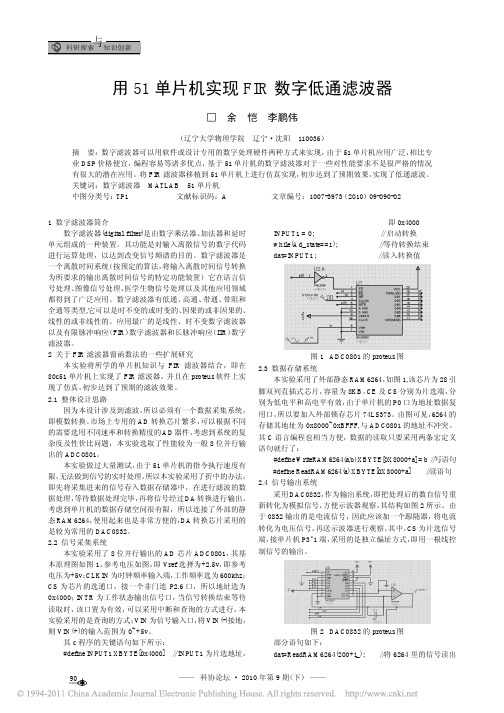
INPUT1 = 0; while(Ad_state==1); dat=INPUT1;
即 0x4000 // 启动转换 //等待转换结束 //读入转换值
图 1 ADC0801 的 proteus 图 2.3 数据存储系统 本实验采用了外部静态 RAM6264, 如图 1,该芯片为 28 引 脚双列直插式芯片, 容量为 8KB, 及 CS 分别为片选端, CE 分 别为低电平和高电平有效, 由于单片机的 P0 口为地址数据复 用口, 所以要加入外部锁存芯片 74LS373。由图可见, 6264 的 存储其地址为 0x8000~0xBFFF,与 ADC0801 的地址不冲突。 其 C 语言编程也相当方便,数据的读取只要采用两条宏定义 语句就行了: #define WriteRAM6264(a,b) XBYTE[0X8000+a] = b //写语句 #deБайду номын сангаасine ReadRAM6264(a) XBYTE[0X8000+a] 2.4 信号输出系统 采用 DAC0832, 作为输出系统, 即把处理后的数自信号重 新转化为模拟信号, 方便示波器观察, 其结构如图 2 所示。由 于 0832 输出的是电流信号, 因此应该加一个跟随器, 将电流 转化为电压信号, 再送示波器进行观察。 其中, 为片选信号 CS 端, 接单片机 P3^1 端, 采用的是独立编址方式, 即用一根线控 制信号的输出。 //读语句
卡尔曼滤波在单片机中的应用
卡尔曼滤波在单片机中的应用1.引言1.1 概述卡尔曼滤波是一种广泛应用于信号处理和控制系统的滤波算法,其主要目的是通过融合不同来源的测量数据,得到对系统状态的最优估计。
在单片机领域,由于资源受限以及实时性要求高的特点,卡尔曼滤波成为一种重要的算法应用。
本文旨在介绍卡尔曼滤波在单片机中的应用。
首先,我们将详细介绍卡尔曼滤波的原理,包括其数学模型和基本假设。
然后,我们将探讨卡尔曼滤波在单片机中的具体应用,包括姿态传感器数据的滤波、机器人定位和导航、以及传感器数据融合等方面。
卡尔曼滤波在单片机中的应用具有重要实际意义。
通过使用卡尔曼滤波算法,可以提高系统对环境变化的适应能力,减少由于测量误差或者噪声引起的不确定性,并提高系统的准确性和稳定性。
同时,由于卡尔曼滤波算法的优良特性,其在实时性要求高的系统中有着广泛的应用。
最后,我们将对卡尔曼滤波在单片机中的应用进行总结,并展望未来的发展方向。
通过本文的介绍,读者将能够更加深入地了解卡尔曼滤波算法在单片机中的实际应用,有助于读者在相关领域的项目中更好地应用卡尔曼滤波算法,提高系统的性能和可靠性。
1.2文章结构1.2 文章结构本文将围绕卡尔曼滤波在单片机中的应用展开探讨。
文章分为引言、正文和结论三个部分。
引言部分首先对卡尔曼滤波进行了概述,介绍了其原理和应用领域,并简要描述了本文的目的。
接下来,文章结构部分将详细说明本文的内容框架,并指出各部分的重点和关注点。
正文部分将从卡尔曼滤波原理出发,对其进行深入解析,并探讨卡尔曼滤波在单片机中的具体应用。
其中,卡尔曼滤波原理部分将详细介绍其数学模型和基本原则,以帮助读者对其有更全面的了解。
随后,本文将重点关注卡尔曼滤波在单片机中的应用,包括其在姿态控制、传感器数据融合等方面的具体应用案例,旨在为读者展示卡尔曼滤波在实际工程中的实用价值和潜力。
结论部分将总结本文的主要内容和研究成果,再次强调卡尔曼滤波在单片机中的应用前景,并对未来的发展进行展望。
基于单片机的AD采集的滤波算法

2.2 AVR单片机内部ADO介
(1)预分频与转换时间
在通常情况下,ADC的逐次比较转换电路要达到最大精度时,需要
50kHz~200kHz之间的采样时钟。在要求转换精度低于10位的情况下,ADC勺采 样时钟可以高于200kHz,以获得更高的采样率。
(4)线性度
线性度有时又称为非线性度,它是指转换器实际的转换特性与理想直线的 最大偏差。
(5)绝对精度
在一个转换器中,任何数码所对应的实际模拟量输入与理论模拟输入之 差的最大值,称为绝对精度。对于ADC而言,可以在每一个阶梯的水平中点进行 测量,它包括了所有的误差。
(6)转换速率
ADC的转换速率是能够重复进行数据转换的速度,即每秒转换的次数。
单的方法是等到第一次转换完成后再改变通道的设置。然而由于此时新一次的转 换已经自动开始,所以,当前这次的转换结果仍反映前一通道的转换值,而下一
次的转换结果将为新设置通道的值。
2)ADC电压参考源
ADC的参考电压(VREF决定了A/D转换的范围。如果单端通道的输入电 压超过VREF将导致转换结果接近于0x3FF(1023)。ADC的参考电压VREF可以 选择为AVCC或芯片内部的2.56V参考源,或者为外接在AREF引脚上的参考电压 源。
1引言
理论上讲单片机从A/D芯片上采集的信号就是需要的量化信号,但是由于
存在电路的相互干扰、电源噪声干扰和电磁干扰,在A/D芯片的模拟输入信号上 会叠加周期或者非周期的干扰信号, 并会被附加到量化值中,给信号带来一定的 恶化。考虑到数据采集的实时性和安全性,有时需要对采集的数据进行软处理, 一尽量减小干扰信号的影响,数字滤波算法就算通过特定的计算机处理,降低干
基于单片机和MATLAB的FIR滤波器设计
Design of FIR Filter Based on MCU and MATLAB
Liu Suping
(Puyang Vocational and Technical College, Puyang Henan 457000, China)
Key words: MCU; MATLAB; FIR filter
0 引言
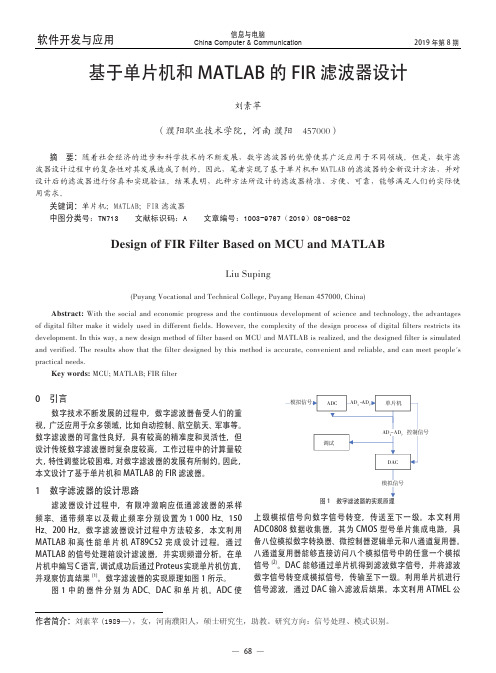
数字技术不断发展的过程中,数字滤波器备受人们的重 视,广泛应用于众多领域,比如自动控制、航空航天、军事等。 数字滤波器的可靠性良好,具有较高的精准度和灵活性,但 设计传统数字滤波器时复杂度较高,工作过程中的计算量较 大,特性调整比较困难,对数字滤波器的发展有所制约。因此, 本文设计了基于单片机和 MATLAB 的 FIR 滤波器。
200。点击 Design Filter 控件,显示滤波器特征图,如图 2 所示。
正弦信号 A 正弦信号 B
加法器
数字滤波器
FDA tool
图 3 仿真模型
(a)f=2 Hz
示波器
(b)f=300 Hz
图 2 数字滤波器的频域特性
数字滤波器的界面主要包括特性区和 Design Filter 两部 分。界面上半部分指特性区,能够充分展现滤波器的特性; 界面下半部分指 Design Filter,主要目的是设置滤波器参数。
软件开发与应用
信息与电脑 China Computer & Communication
2019 年第 8 期
基于单片机和 MATLAB 的 FIR 滤波器设计
刘素苹
基于单片机的数字滤波算法分析与实现
20 年 l 月 08 1
齐 齐 哈 尔 大 学 学 报
J u a f qh rUnv st o r l ia ieri n o Qi y
Vo .4No6 1 . . 2
N v,0 8 o. 0 2
基 于单 片机 的数字滤波算法分析 与实现
朱恒军 ,王发智 ,姚仲敏
1 限幅滤波法 。限幅滤波法是把两次相邻的采样值相减 ,求出增量并用绝对值表示 ,然后与两次采 ) 样允许的最大值 y 进行 比较 。 y的大小 由被测对象的具体情况而定 , 若小于或等于 y 则取本次样本 ,
值 ;若大于 y ,则取上次采样值作为本次采样数据的样本 。 2 )中值滤波法。中值滤波法是将某一参数连续采样 Ⅳ次 , Ⅳ通常是奇数 ,然后把 Ⅳ次采样值按从小
・
5 4・
齐 齐 哈 尔 大 学 学 报
20 年 08
法的特点是用、 中 值滤波算法滤掉采样值中的 脉冲干扰, 然后把剩余的各采样值进行递推平均滤波。 基本算 法为:Y Y ≤ , l 2… 其中,3 N ;歹 2 Y+ 卜/ 一 ) ≤ 4 = + s …+ ,)Ⅳ 2。 1【
1 常用 的数 字滤波算 法
通过对单片机应用环境的分析 , 在实践 中得到一些单片机中能够实现 的简单数字滤波算法。常用的有
以下几种 : 限幅滤波法 、中值滤波法 、 算术平均滤波法 、 加权平均滤波法 、 滑动平均滤波法 、 低通滤波法、
复合 滤 波法 。
2 数字滤波算法 基本 原理
r t ' d t a t emn aa s; l rt r d t n w; eun aa e
{ t p v u l ] e =a eb ̄j m l ;
单片机滤波
单片机滤波一、引言滤波是信号处理中常用的一种技术,用于去除信号中的噪声和杂波,使信号更加纯净和稳定。
在单片机应用中,滤波技术被广泛应用于传感器信号处理、通信信号处理等领域。
本文将介绍单片机滤波的原理及常用滤波方法。
二、滤波原理单片机滤波的原理是通过改变信号的频谱特性,将不需要的频率成分滤除,从而得到我们所需的信号。
常见的滤波方法有时域滤波和频域滤波两种。
1. 时域滤波时域滤波是通过时域上对信号进行加权平均来实现滤波的方法。
常见的时域滤波有移动平均滤波和中值滤波两种。
移动平均滤波是将一组连续的采样值进行平均运算,得到一个平均值作为输出。
这种滤波方法能够有效地去除高频噪声,但对于低频信号的保留能力较差。
中值滤波是将一组采样值按大小排序,取其中位数作为输出。
这种滤波方法适用于去除由脉冲噪声引起的尖峰干扰,但对于连续变化的信号较难处理。
2. 频域滤波频域滤波是通过对信号进行傅里叶变换,将信号从时域转换为频域,然后在频域上对信号进行滤波的方法。
常见的频域滤波有低通滤波和高通滤波两种。
低通滤波是将高频成分滤除,只保留低频成分的滤波方法。
这种滤波方法适用于去除高频噪声,保留低频信号。
高通滤波是将低频成分滤除,只保留高频成分的滤波方法。
这种滤波方法适用于去除低频噪声,保留高频信号。
三、常用滤波方法在单片机应用中,常用的滤波方法有:1. 一阶滤波器一阶滤波器是最简单的滤波器之一,它只包含一个电阻和一个电容。
一阶低通滤波器的输出信号是输入信号的一阶低通滤波结果,可以用于去除高频噪声。
一阶高通滤波器的输出信号是输入信号的一阶高通滤波结果,可以用于去除低频噪声。
2. 二阶滤波器二阶滤波器比一阶滤波器具有更好的滤波效果,它包含两个电阻和两个电容。
二阶低通滤波器可以更好地去除高频噪声,保留低频信号。
二阶高通滤波器可以更好地去除低频噪声,保留高频信号。
3. 升采样和降采样升采样是将输入信号的采样率增加,从而提高信号的分辨率。
单片机dac滤波
单片机dac滤波
单片机DAC滤波是指在单片机系统中,利用数字模拟转换器(DAC)对信号进行滤波处理的过程。
这种滤波通常用于消除噪声、平滑信号或提取特定频率的成分。
在单片机DAC滤波中,通常使用低通滤波器(LPF)或带通滤波器(BPF)来实现。
低通滤波器主要用于滤除高频噪声,保留低频信号;带通滤波器则用于提取特定频率范围的信号,滤除其他频率成分。
单片机DAC滤波的实现方法有多种,其中一种常用的方法是使用离散时间滤波器(Discrete-Time Filter,简称DTL)。
离散时间滤波器基于离散时间信号处理理论,通过一系列离散时间点上的样本值来逼近连续时间信号。
在单片机DAC滤波中,离散时间滤波器可以通过对DAC输出的离散值进行加权平均,实现连续时间信号的低通或带通滤波。
另外,还有一种常用的方法是使用无限冲激响应滤波器(Infinite Impulse Response Filter,简称IIR滤波器)或有限冲激响应滤波器(Finite Impulse Response Filter,简称FIR滤波器)。
这些滤波器通过对输入信号进行卷积运算,实现信号的滤波处理。
在单片机DAC滤波中,可以使用IIR或FIR滤波器对DAC输出的离散值进行卷积运算,实现连续时间信号的低通或带通滤波。
总的来说,单片机DAC滤波是一种有效的信号处理方法,可以用于消除噪声、平滑信号或提取特定频率的成分。
根据具体的应用需求,可以选择不同的滤波器类型和实现方法,以达到最佳的滤波效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CETTIC全国单片机汇编语言程序设计师职业培训认证结业设计基于凌阳16位单片机的程控滤波器指导老师:学生姓名:完成日期:2009年11月14日摘要本系统以凌阳16位单片机为控制核心,利用开关电容技术实现程控滤波的功能。
前端放大器由运放和数字电位器构成,实现了增益0—60dB,步进10dB可调。
滤波器采用模拟开关和电容的组合替代电阻的技术,构成RC有源滤波网络,实现了程控高通、低通滤波截止频率1KHz—20KHz,步进1KHz可调。
设计实现了四阶低通椭圆滤波器。
利用单片机和直接数字调制技术(Direct Digital synthesizer)芯片AD9850,设计并制作了简易幅频特性测试仪,扫频输出信号范围从100Hz到200KHz,步进10 KHz可调。
人机接口采用4×4键盘及LCD液晶显示器,控制界面直观、简洁,具有良好的人机交互性能。
关键词:程控滤波凌阳16位单片机数字电位器开关电容目录引言 (3)第一章方案论证 (3)1.1.主控单元 (3)1.1.1.放大器部分 (3)1.1.2.滤波器部分 (4)1.2.方案论证 (4)1.2.1.放大器方案论证 (4)1.2.2.滤波器方案论证 (5)第二章. 系统硬件设计 (5)2.1.系统的总体设计 (5)2.2.单元电路的设计 (6)2.2.1.放大器电路设计 (6)2.2.2 滤波器电路设计 (6)2.3.发挥部分的设计与实现 (8)2.3.1椭圆函数VCVS滤波节 (8)2.3.2 测量与计算 (9)3.3.3.系统的测试 (10)第三章结论 (12)附录 (12)参考文献 (14)程控滤波器引言:本系统以凌阳16位单片机为控制核心,利用开关电容技术实现程控滤波的功能。
前端放大器由运放和数字电位器构成,实现了增益0—60dB,步进10dB可调。
第一章、方案论证经过仔细研究分析,我们认为系统的结构框图1.1如下所示:根据题目要求,我们分以下三部分进行方案设计与论证1.1主控单元方案一:采用80C51系列单片机,但其与外围设备的接口电路较为复杂。
方案二:采用凌阳SPCE061A单片机。
它中断资源丰富,而且内置了在线仿真、编程接口,可方便地实现在线调试。
经过比较后采用方案二。
1.1.1放大器部分程控放大器的增益,一般有两种途径,一种是改变反相端的输入电阻,另一种是改变负反馈电阻阻值。
方案一:采用模拟开关或继电器作为开关,构成梯形电阻网络,单片机控制继电器或模拟开关的通断,从而改变放大器的增益。
此方案的优点在于简单,缺点是电阻网络的匹配难以实现,调试很困难。
方案二:用DAC的电阻网络,改变电阻的方法,电流输出型DAC内含R-2R 电阻网络,可以作为运放的反馈电阻或输入电阻,在DAC输入数据的控制下,实现放大器增益的程控改变。
该方案的优点无需外接精密电阻,增益完全由输入的数字量决定,就可以对信号进行放大或衰减,使用方便;缺点是信噪比较低,通频带较窄。
方案三:非易失性数字电位器改变电阻,克服了模拟电位器的主要缺点,无噪声,寿命长,阻值可程控改变,设定阻值掉电记忆。
该方案优点是增益范围宽,占用μP口少,成本低。
通频带取决于运放的通频带。
在本题中,电压增益为40dB,增益10dB步进可调,通频带为100Hz~40kHz,放大器输出电压无明显失真。
由于输入信号幅值很小,所以我们选用高精度的测量放大器AD620。
我们采用方案三,非易失性数字电位器与测量放大器的组合,实现程控放大器。
电压增益为60dB,增益10dB步进可调,通频带为100Hz~40kHz,放大器输出电压无明显失真。
1.1.2滤波器部分根据题目要求低通滤波器在2fc处,高通滤波器在0.5fc处,放大器与滤波器的总电压增益不大于30dB,我们选用二阶电压控制滤波器。
图1.2二阶电压控制滤波器改变截止频率有以下方案方案一:采用模拟开关或继电器作为开关,切换不同的RC组合来改变截止频率,优点是电路简单,缺点是电阻网络的匹配难以实现,调试很困难适合截止频率调节档位较少的滤波器。
方案二:固定电容C,采用非易失性数字电位器改变电阻的数值,从而改变截止频率。
优点是电路简单,缺点数字电位器是分档调节,不能实现电阻的连续可调,很难实现截止频率的精确调节。
方案三:利用开关电容技术,利用开关和电容的组合来替代电阻,电容值保持不变,我们只要控制开关的频率,就可以等效的改变电阻,完成对滤波器截止频率的设置。
对于具体分析方法在后面有详细叙述。
我们选择方案三,当前较先进的技术,并且已经有了成熟的产品,例如max260可编程滤波器1.2 方案论证1.2.1放大器方案论证放大器输入正弦信号电压振幅为10mV,对于毫伏级的信号放大一般要采用具有高共模抑制比、高精度、高输入阻抗的测量放大器。
放大器电路采用AD620和数字电位器组成。
数字电位器使用的是X9241MAPI,它把0-2K,0-10K,0-10K,0-50K四个可调电阻集成在一个单片的CMOS微电路中的数控电位器,步进分别为34Ω,170Ω,170Ω,850Ω,经过组合步进更小,所以放大倍数也被控制在一个很精确的范围。
1.2.2滤波器方案论证我们采用的是RC结构的二阶滤波电路。
低通滤波时:根据二阶的低通滤波函数,在大于截止频率f c 时,幅频特性曲线以40/10f速度下降,所以在2 f c 处的增益为-12.04dB。
再加上放大器的40dB增益,总增益为27.96dB,达到了题目小于30 dB的要求。
高通滤波时:根据二阶的高通滤波函数,在小于截止频率f c时,幅频特性曲线以40/10f速度上升,所以在0.5 f c 处的增益为-12.04dB。
再加上放大器的40 dB增益,总增益为27.96dB,也达到了题目小于30 dB的要求。
在电阻的选取上,我们采取了开关电容取代电阻的方案。
基本开关电容单元的原理图,如下:开关S1,S2采用通段受方波信号控制的模拟开关,当¢为高电平时开关S1闭合,当¢为低电平时S1开通。
S2的开通关断情况与S1相反。
在时钟周期Tc 内,从1端向2端传输的电荷量为:。
而电流为:可见基本开关电容单元可以等效为一个电阻。
而且方波信号的频率与信号频率的比值越大,这种近似性越好。
第二章系统硬件设计2.1系统的总体设计图2.1程控滤波器结构框图本系统以凌阳61单片机作为主控单元,将设计任务分为放大器,低通滤波器,高通滤波器,椭圆滤波器,人机接口单元等功能模块。
放大器用AD620和数字电位器组成的放大电路两级串联构成。
单片机通过控制数字电位器的阻值大小来控制放大器放大倍数。
滤波器在单片机控制信号作用下在低通,高通,椭圆三种工作方式的切换。
低通和高通滤波电路采用模拟开关,电容和运算放大器组成,单片机通过控制模拟开关的通断频率,来实现截止频率的调节。
本系统还设计了良好的人际交互接口,实现了键盘处理,液晶显示,语音报数等功能。
2.2单元电路的设计2.2.1放大器电路设计由于运算放大器在高频时,其带宽下降,放大倍数减小,因此我们采用两级放大,具体电路图如图2.2:2.2.2 滤波器电路设计现以低通滤波电路设计为例说明。
对于二阶低通滤波电路,图2.3传递函数为:其中 , ,为了在截止频率附近有较平坦的幅频特性曲线,令Q=0.707,可求出,又因为,因此。
由对偶原理可知,二阶高通电路中。
用开关电容原理等效后的电路图为:图2.4由前面分析可知又由开关电容原理,所以因此,在与的比值固定时,开关频与截止频率成正比,因此可用开关频率控制截止频率的大小。
根据题目要求,截止频率的步进为因为,所以,当截止频率时,开关频率;当截止频率时,开关频率;同理,二阶高通滤波器电路进行开关电容等效后,开关频率可以控制截止频率的大小。
开关频率的大小所对应的截止频率与低通时一样,方便了系统设计和程序的编写。
2.3发挥部分的设计与实现2.3.1椭圆函数VCVS滤波节(1)实现了放大器电压增益为60dB,输入信号电压振幅为10mV;增益10dB 步进可调,电压增益误差不大于2%。
(2)制作了一个四阶椭圆型低通滤波器,带内起伏≤1dB,-3dB通带为50kHz,要求放大器与低通滤波器在200kHz处的总电压增益小于5dB,-3dB通带误差不大于5%。
四阶椭圆型低通滤波器由椭圆函数压控电压源(VCVS)低通滤波节实现,借助MATLAB设计低通椭圆滤波器。
(3)制作了一个简易幅频特性测试仪,其扫频输出信号的频率变化范围是100Hz~200kHz,频率步进10kHz。
2.3.2测量与计算⑴根据设计要求,带内起伏1,-3通带为50,利用MATLAB函数,求出滤波器通带带宽。
⑵调用MATLAB ellip函数求出传递函数的零极点值(见附录)。
[B,A]=ellip(N,,,,’S’);%B为分子多项式系数,A为分母多项式系数z=roots(B); %求解零点p=roots(A) %求解极点⑶每个低通滤波节包含一对共轭复数极点和一对虚数零点(复数极点实部为x,虚部为,零点在处)。
四阶椭圆低通滤波器由两个滤波节级联构成,零极点按就近原则分配到两个滤波节⑷利用MATLAB编写程序,按照下列公式计算各节阻容参数。
定义系数:,,(,,取正值)选用常用标称电容值C ,令,有:, , , ,,附:各滤波节阻容值A:计算值计算值218 0.01218 0.018uF109 5000pF5039 5000pF无限制510020910B:计算值 C 计算值2813.5 330p2813.5 9.173nF1406.8 0.165nF56827 0.165nF无限制5100247093幅频特性测试仪结构框图简易幅频特性测试仪是以Spce61单片机位控制核心,由正弦波发生器,数据采集、处理、显示等功能模块组成。
其中,扫频信号采用DDS技术实现。
系统输出电压峰值保持不变得正弦波扫频信号,由单片机改变扫频信号的频率从100Hz到200kHz,以10kHz步进,从然后测出对应的输出信号峰值。
经峰值检测将交流信号峰值转化为直流信号。
被单片机经A/D转化后读取。
单片机将输入信号频率大小和输出峰值存储在RAM中。
从最小频率扫描到最大频率后,根据采集数据计算出幅频特性曲线显示在液晶屏上。
扫频信号由DDS芯片AD9850产生。
幅频特性测试仪的频率稳定度取决于外接晶振的稳定度。
选取50MHz的晶振,可以实现0.01Hz-12.5MHz连续扫频,而题目要求的是100Hz -200 KHz,所以它足以满足要求。
DDS技术是开环控制,频率调节速度仅受限于逻辑门的延迟,速度高于PLL频率合成技术几个数量级。
所以DDS合成速度快,频率分辨率高,并且线路简单。
由于采样点只有21个,对AD转化的速度要求不高。