自动报靶系统的设计分解
基于点识别的自动报靶系统
基于点识别的自动报靶系统胡凯;沈新锋;张瑞东【摘要】设计分为激光枪打靶和激光枪着落点识别两个部分.在正式打靶前,需要手动按键进行靶心和靶环间的距离校准,校准完成后可正式打靶.正式打靶时,手动按键控制激光枪上下左右移动并发射激光束,通过按键控制摄像头采集激光点的信息.采集完成后,通过按键控制在液晶显示屏上显示相应的闪烁点,同时在显示屏上显示激光点的方位信息和环数信息.【期刊名称】《电气自动化》【年(卷),期】2015(037)004【总页数】3页(P87-89)【关键词】打靶;激光枪;摄像头;识别;方位;环数【作者】胡凯;沈新锋;张瑞东【作者单位】南京信息工程大学信息与控制学院,江苏南京210044;南京信息工程大学信息与控制学院,江苏南京210044;南京信息工程大学信息与控制学院,江苏南京210044【正文语种】中文【中图分类】TP2720 引言本设计采用msp430F149作为核心处理器,设有打靶和报靶两套装置。
打靶装置用来打靶和按键控制发送命令,报靶装置用来接收命令进行激光点的位置识别和报靶。
1 总体设计方案图1 实物模型图本设计包含两个部分,模型如图1所示。
第一个部分是激光枪打靶。
此装置的系统结构如图 2(a)所示,硬件[1]上采用了无线模块nRF905、细分器2M542、4*4矩阵键盘、激光笔和42步进电机搭建的二维云台。
本设计中选择四个按键控制步进电机上下左右移动,选择二个按键进行靶心校准和靶环距校准,选择二个按键进行图像采集和自动报靶,选择二个按键控制激光笔的打开和关闭。
在进行靶心校准时,将激光点打到靶心位置,MCU 控制摄像头识别激光点并记录下实际靶心位置的偏差值。
在进行靶环间的距离校准时,选择任意一个靶环,将激光点打到该靶环上,MCU控制摄像头识别激光点并记录下与显示屏上所画的靶环的比例系数。
校准完成后,便可将激光笔打到摄像头拍摄范围内任一位置,通过按键控制摄像头获取激光点的横纵坐标,根据记录的偏差值自动修改,再通过按键便可显示点的方位信息和环数信息。
基于LabVIEW的激光模拟射击自动报靶系统研究

基于LabVIEW的激光模拟射击自动报靶系统研究简介激光模拟射击自动报靶系统是一个功能强大的训练设备,可以用于远程训练和游戏娱乐等各种场合。
本文将介绍基于LabVIEW的激光模拟射击自动报靶系统,包括系统的设计和实现。
系统设计该系统由激光系统、图像处理系统和报靶系统组成。
激光系统激光系统主要用于模拟枪击,在系统中,我们使用一支激光笔作为枪支,激光笔可以在空气中发射明亮的激光束。
为了使得激光可以被系统检测到,我们需要在激光笔上安装一个反光板,并且在笔的后面安装一个光电二极管用于检测激光的反射。
图像处理系统图像处理系统是整个系统的核心部件,它可以实时检测激光的位置和靶标的位置,并计算出弹道的偏差。
图像处理系统使用计算机视觉技术,通过摄像头对靶标进行监测,当激光击中靶标时,计算机可以通过算法判断激光击中的位置,并将数据传送给报靶系统进行计分,并且根据被击中的位置和弹道偏差,调整反光板的位置。
报靶系统报靶系统是整个系统的输出部件,它可以将激光击中的位置进行计分和显示,通过这种方式可以进行极真实的模拟射击训练。
系统实现硬件设计系统的硬件设计包括激光笔、反光板、光电二极管、摄像头、计算机等必要硬件组件,其中计算机是整个系统的核心部件,它运行着LabVIEW程序,对图像处理和报靶系统进行控制。
软件设计系统的软件设计基于LabVIEW进行,主要分为三部分:图像处理程序图像处理程序是整个系统的核心部件,它可以对靶标进行实时检测,并计算激光的位置和弹道偏差,主要代码如下所示:``` LabVIEW // 图像处理程序 void ImageProcessing() { while(!stop) { // 获取摄像头图像 Mat image; cap >> image;// 转换为灰度图像cvtColor(image, grayImage, COLOR_BGR2GRAY);// 进行边缘检测,并进行霍夫变换Canny(grayImage, edge, 50, 200, 3);vector<Vec2f> lines;HoughLines(edge, lines, 1, CV_PI / 180, 50, 0, 0);bool flag = false;double minDist = 99999999;Point2f minimumPoint;// 判断是否检测到激光for (size_t i = 0; i < lines.size(); i++){float rho = lines[i][0], theta = lines[i][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a * rho, y0 = b * rho;pt1.x = cvRound(x0 + 1000 * (-b));pt1.y = cvRound(y0 + 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));double dist = getDistance(pt1, pt2);if (dist < 20 && dist < minDist){flag = true;minDist = dist;minimumPoint = Point2f(pt1.x, pt1.y);}}// 如果检测到了激光就进行处理if (flag){// 计算反光板的位置double pos = (minimumPoint.x - getWidth() / 2) / getPixelPerDeg ree();// 发送反光板位置信息给控制程序SendData(\。
一种自动报靶系统的设计与实现
一种自动报靶系统的设计与实现传统的报靶主要依靠人工实现,存在精度不高、安全隐患较大及人力资源浪费的不足。
现在市场上一些自动报靶的产品中普片存在成本高、系统比较复杂,并且占用场地等缺陷,本文所设计的报靶系统是基于多靶多人同时射击时,射手和检查监控都能实时检测子弹是否击中靶子并实现自动报靶,系统能科学、精确、实时地测量射击的环数和方位,客观、公正地评价射击训练成绩,有效地指导射击训练,满足信息化建设和训练的急需。
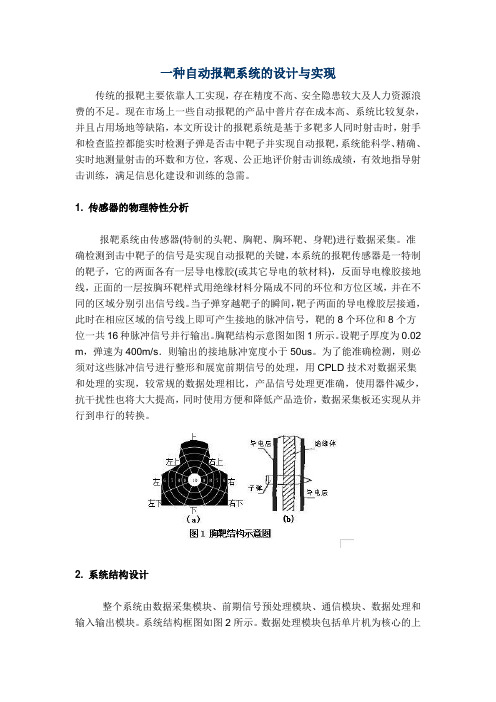
1. 传感器的物理特性分析报靶系统由传感器(特制的头靶、胸靶、胸环靶、身靶)进行数据采集。
准确检测到击中靶子的信号是实现自动报靶的关键,本系统的报靶传感器是一特制的靶子,它的两面各有一层导电橡胶(或其它导电的软材料),反面导电橡胶接地线,正面的一层按胸环靶样式用绝缘材料分隔成不同的环位和方位区域,并在不同的区域分别引出信号线。
当子弹穿越靶子的瞬间,靶子两面的导电橡胶层接通,此时在相应区域的信号线上即可产生接地的脉冲信号,靶的8个环位和8个方位一共16种脉冲信号并行输出。
胸靶结构示意图如图1所示。
设靶子厚度为0.02 m,弹速为400m/s.则输出的接地脉冲宽度小于50us。
为了能准确检测,则必须对这些脉冲信号进行整形和展宽前期信号的处理,用CPLD技术对数据采集和处理的实现,较常规的数据处理相比,产品信号处理更准确,使用器件减少,抗干扰性也将大大提高,同时使用方便和降低产品造价,数据采集板还实现从并行到串行的转换。
2. 系统结构设计整个系统由数据采集模块、前期信号预处理模块、通信模块、数据处理和输入输出模块。
系统结构框图如图2所示。
数据处理模块包括单片机为核心的上位机和以Delphi为基础开发的一个PC机监控终端。
系统可以同时进行12名射手射击,单片机上位机为每个射手显示实时成绩,PC机监控终端则可以实时显示所有射手的成绩,用于对射击的检查监控。
数据采集由特制的信号靶传感器采集;前期信号预处理采用大规模数字集成电路CPLD设计,把前几个单元电路集成在一个顶层电路,将其所实现功能写入一片CPLD芯片中,减少了电路空间,提高了总体可靠性;通信模块由微功率无线数传模块ZT—TR43U组成,具有低功耗、高可靠性、传输性能优良等特点,同时它还具备USB接口的方式,与PC机进行良好的通信;输入输出模块由键盘、液晶模块和PC机等组成。
激光枪自动射击报靶装置
子
测
试
激光枪 自动射击报靶装置
陈启 昂 潘瑶麟 楼奇 力
( 中国计量 学院现代科技 学院 3 1 0 0 1 8 )
摘要 : 本文 设计的是一个 自动射击 报靶装 置, 主要 由激光 枪及瞄准机构 、 胸 环靶、 弹着 点检测 电路这几个部分构成 。 整个系统 是以 K 6 0单片机为控制核心 , 通 过摄像头, 对胸环靶进行 图像 采集、 处理 , 反馈给单片机 , 判 断出弹着 点所在位置 , 并且能通过
r o u n d t a r g e t g r a p h i c s ,a n d f l a s h d i s p l a y c o r r e c t i o n . A u t o m a t i c c o n t r o l o f l a s e r g u n s ,t h e l a s e r b e a m s p o t i n 1 5 s e c o n d s f r o m t h e r a pi d a i m i n g a t t h e s p e c i f i e d l o c a t i o n o n t h e c h e s t r o u n d t a r g e t a n d h i t t h e b u l 1 ’S —
G u n a n d a i m i n g , c h e s t r o u n d t a r g e t ,c o r r e c t i o n d e t e c t i o n c i r c u i t t h a t s o m e p a r t s . T h e e n t i r e s y s t e m i s t o c o n t r o l t h e k 6 0 m i c r o c O n t r o l 1 e r c o r e , t h r o u g h t h e c a m e r a , o n t h e c h e s t r o u n d t a r g e t f o r i m a g e a c q ui s i t i o n , p r o c e s s i n g , f e e d b a c k t o t h e S C M ,d e t e r mi n e w h e r e t h e c o r r e c t i o n , a n d c a n u s e t h e k e y b o a r d t o c h a n g e t h e w a v e p w m s e r v o m o t o r t u r n s t h e a p p r o p r i a t e a n g l e , t h u s c o n t r o l l i n g l a s e r c o r r e c t i o n . I n a d d i t i o n t o b a s i c
数字电子技术课程设计报告-射击自动报靶器

题目:射击自动报靶器班级:目录一、设计任务要求—————————1二、方案设计与论证————————2三、各单元电路设计与分析—————3四、总体电路原理图及元器件清单——6五、电路仿真及仿真结果分析————9六、作品照片———————————9七、结论与心得体会————————10射击自动报靶器一、设计任务与要求1,用11个开关信号模拟环数取样信号,分别表示(0,1,2,3,4,5,6,7,8,9,10环,其中0表示没射中,每次射击完毕后立刻显示环数2,每个人可以射击5次,5次后射击次数自动清零,表示此人不能再射击3,自动统计累计环数并显示。
二,方案设计与论证从设计要求可以看出是要设计出一个能够实现自动显示射击次数,单次射击环数,中靶次数以及中靶总次数的自动报靶器。
由其功能可以看出在此设计中要用到编码器,计数器,加法器,寄存器,译码器,门电路以及一些基础元件来设计出相对应的功能。
1 设计方案(1)电路原理框图(2)设计思路1开关信号模拟环数取样信号选用十一个开关,分别代表打靶成绩:1,2,3,4,5,6,7,8,9,10环,其中10环用一个显示,每次只有一个开关从高电平变到低电平。
2编码电路选用74ls148优先编码器,将两个编码器,非门和与非门连接成16--4线优先编码器,对十一个摸拟信号进行编码。
3计数器电路计数器电路分为射击次数计数和中靶次数计数两部分。
两部分都选用74 ls160计数器,射击次数部分用反馈置零法接成5进制计数器,并用十一个开关模拟信号用组合逻辑电路连接成CP脉冲,当第五次射击完成立即清零。
中靶次数部分则以优先编码器的四个输出通过组合逻辑电路连接成CP脉冲。
4显示电路选用七段显示译码器对单次靶数,射击次数、中靶次数、中靶总次数进行显示。
5复位清零电路通过一个接电源的开关连接在对中靶次数进行计数的74 ls160的CLR的端和两个寄存器的CLR的端,对中靶次数和总次数进行手动复位清零。
电视报靶中的自动卷靶机设计说明
电视报靶中的自动卷靶机设计毕业设计第一章前言随着我国国防工业现代化轻兵器靶场测试及野外实弹演习应用方面产生了轻兵器靶场采用自动卷靶和电视报靶代替人工报靶技术,是轻兵器精度测试技术中的重大工艺改进。
这一技术的出现,不仅仅使轻兵器靶场的测试人员从人工挂靶,传递靶纸、验靶纸、糊靶纸等繁重的工作中解脱出来,而且还为国家大大节约了人力、物力、财力和时间,同时也为工作人员的身心健康提供了保障,具有很好的社会效益和经济效益。
本装置的特点是验靶迅速,不会出现试验与靶纸不一一对应的差错,随打随验、操作简单、安全可靠、避免了验靶时子弹过多浪费,因为对脱靶或精度较低的试验枪可及时调整准星。
另外,不需要专业的挂靶人员,解决了工作人员长期在阴冷潮湿的地下室工作所引起的一系列职业病,节省了社会劳动力,保障了工作人员的身心健康。
此装置采用了幻灯技术,不但使靶纸图像清晰可辩,而且降低了靶纸的质量要求和成本,节约了制作固定靶纸用框架的木材,还可使靶纸充分利用。
自动卷靶机的卷、倒靶和张紧靶纸的控制均采用了三相鼠笼式感应电动机,方便耐用,易维修,尤其是张紧靶纸电机工作在堵转状态,这在感应电动机的实际应用中实属少见。
本装置经有关单位实际应用,证明是切实可行的。
第二章兵器靶场采用电视报靶的设计方案2.1 方案设计示意图(见图<1>)图〈1〉设计方案总图图(1)所示为测试靶场具有多个靶口的设计方案。
该方案中将卷靶机构与张紧靶纸机构均安装于地下室,考虑到当一条靶纸纸带及控制系统出现鼓掌需要维修,可于地下室进行,而不必中断其他靶口的实验。
若靶场只有一个靶口,亦可将卷靶机构和张紧机构分别安置于屋顶上方和地下室两处。
2.2幻灯技术和靶纸技术由于整个靶场建造得具有很好的挡光性能,因此,地下室与其上方悬挂靶纸相当于一个暗室。
采用普通幻灯机将特制的靶纸幻灯片打到靶纸上时,靶纸上可以呈现清晰标准的靶纸图形。
2.3 摄影机和工业电视的应用过幻灯片得到靶纸图形被摄象机摄取后转换为电信号通过电缆传输给工业电视,则在电视屏幕上呈现出清晰可见的完整靶纸图形,可直接观察靶纸情况,随打随验兵器是否合格。
光电自动报靶系统的设计与实现
光电自动报靶系统的设计与实现杨子宁【摘要】为了解决人工报靶精确度低和存在安全隐患等问题,介绍了一种光电自动报靶系统的设计方案.该系统以由激光二极管构成的激光网络进行信号检测,当子弹上靶时会阻断激光网络中的两条相互垂直的光线,利用以单片机为核心的信号处理系统对这一信号进行处理能够精确得到弹着点的坐标和环数,并能大大减少错报和漏报的情况.该系统精度高、成本低、安全可靠,有较好的应用前景.【期刊名称】《现代电子技术》【年(卷),期】2007(030)007【总页数】3页(P38-39,42)【关键词】自动报靶;激光二级管;信号检测;单元机【作者】杨子宁【作者单位】国防科学技术大学,光电科学与工程学院,湖南,长沙,410073【正文语种】中文【中图分类】TP2731 引言目前,在部队射击训练、考核和比赛中,示靶、检靶和成绩记录主要依靠人工完成,这样不但效率低、可靠性差,而且存在安全隐患[1],因此设计和采用安全有效的自动报靶系统具有重要的现实意义和迫切的现实要求。
现有市售的自动报靶系统采用的检测手段一般来说有采用金属片(或其他导电体)连通检测和图像识别两种方法。
连通检测法是根据子弹经过靶面时使平行于靶面的两块金属板导通的原理实现的[2],可见,若要使分辨率比较高,必须将金属板分成尽可能多的区域,这使得电路相当复杂。
图像识别法是用平行于靶面的摄像机拍摄靶面图像,通过计算机识别检测出子弹触靶的位置[3],他的特点是分辨率比较高。
但以上两种方法对于第二发子弹从第一发子的弹孔穿过的情况检测起来相当困难,容易造成漏报,这种情况在高水平射击中,子弹多集中在10 环位置时出现较多。
本文则采用光电定位的技术以更为直观、简便的方法同样实现了检测的目的,该系统以由发光装置构成的光电靶作为检测弹着点的装置,以单片机为核心构成数据分析处理系统,能够精确得到子弹弹着点的坐标和相应的环数,并且可以有效地减少错报和漏报的情况。
另外,通过对发光装置通断的控制还可以对选手的反应速度和灵敏度等重要指标进行考核和评估。
自动射击报靶装置
自动射击报靶装置徐暑葛宇清李亚运南京医科大学基础医学院生物医学工程系一.引言 (5)二.硬件部分方案设计 (5)1.激光笔方位控制方案论证 (6)1.1电机选择方案 (6)1.2电机驱动模块的方案论证 (6)1.3电机组合方案 (7)1.4激光枪控制方案论证 (8)2.图像采集方案 (8)3.无线通讯模块 (9)4.显示模块 (9)四:软件部分设计 (11)1.射击位控制 (11)2.靶位检测的分析 (12)四.系统调试 (17)2.测试内容 (17)a.基础要求 (17)b.发挥部分 (18)3.结果分析 (18)附录: (19)摘要:系统采用两片MSP430F149作为激光枪自动射击装置控制系统的控制核心,其中1片作为主MCU控制激光枪模块的击发、自动瞄准程序、通过弹着点坐标判定打靶环数及方位,自动报靶及在12684液晶屏上显示弹着点位置等功能,另外1片MSP430F149单片机进行图像识别处理,确定弹着点坐标,并通过nrf905无线发送给主MCU,其中弹着点检测采用带有FIFO的OV7670摄像头模块进行图像信息的采集。
主控制模块单片机接收弹着点的坐标信息,进而控制电机运转方向及步数进行弹着点的调整。
本系统可实现激光枪自动射击,通过键盘控制激光枪的弹着点在胸靶上位置,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息,同时具有易于操作,精确控制,低功耗等优点。
关键词:MSP430;ov7670摄像头;自动射击;nrf905Abstract:The system uses two MSP430s as Cybernetics Core of the laser gun automatic shooting device .One MSP430 is used as main MCU.It controls the shooting of the laser gun ,also used in auto-targeting program. It determines the number of target loop and location through the coordinate of the impact point.Another MSP430F149 MCU is for image recognition processing, determing the coordinates of the spot and send the message to the main MCU through the NRF905 wireless. The impact point detection module acquires an OV7670 camera with a FIFO. The camera is for the acquisition of the image information.After receiving the impact point location information, the MSP430 would control the motor so that it could make adjustments about the impact point.This system can realize automatic shooting ,. We can set Where the impact point locates on the target through the keyboard.. It also can show tthe number of target loop and the locate information of the impact point.Meanwhile it has such advantages like easy operation, accurate control and low power consumption. Keyword: MSP430;ov7670camera;automatically shooting;一.引言题目要求制作一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
自动报靶系统设计与实现
自动报靶系统设计与实现摘要:文章结合惠更斯原理的子波思想提出一种超声传感器报靶系统,当子弹穿过靶标时,弹头波在其脉冲压力作用下通过空气介质向四周传播,直至遇上微孔管,部分激波通过微孔管到达传感器。
接收信号采用无线传输模块,通过解析各个传感器的时差值来计算弹丸位置,以此实现弹着点自动报靶的系统。
本系统对射击瞄准点指示物无特定要求,结构简单、定位精度高、不受外界环境影响,通过孔式传感器和幕布的方式解决多位无干扰和连发的问题。
引言为了更好、更高效地训练枪械持有者的射击技能,解决传统训练设备技术落后、效率低等问题,更好地适应高效、通用、科学的训练形势,发展与之相适应的新的现代化训练设备迫在眉睫。
现有大多数自动报靶定位装置的靶标皆为有形靶标。
多数采用封闭式声空腔结构,采用前后封闭靶板,对前后封闭靶板受弹数有一定的技术要求,1cm2多者8发、少者4发前后靶板就要修补。
因而靶标的使用寿命低,更换修补次数多。
另外,现有技术中的定位方法是利用弹丸的弹头波到达靶面上的不同传感器所产生的时间差,确定弹丸在靶面上的坐标。
虽能较好解决弹丸精确定位,但是不能解决连发问题。
因此,现有的声电定位装置存在以上缺陷,而且适用范围也有一定的局限性。
针对现有技术的上述不足,提出一种敞开形超声传感器的报靶系统,其结构简单、体积小、重量轻、无耗材并且野外布设、便携、射击瞄准指示物材料无特定要求,定位精度高,能解决弹丸单、连发精确定位问题。
是一种能很好适用于野外实弹连发射击训练、演习、战场杀伤破坏评估中弹丸定位及自动报靶的声电定位装置。
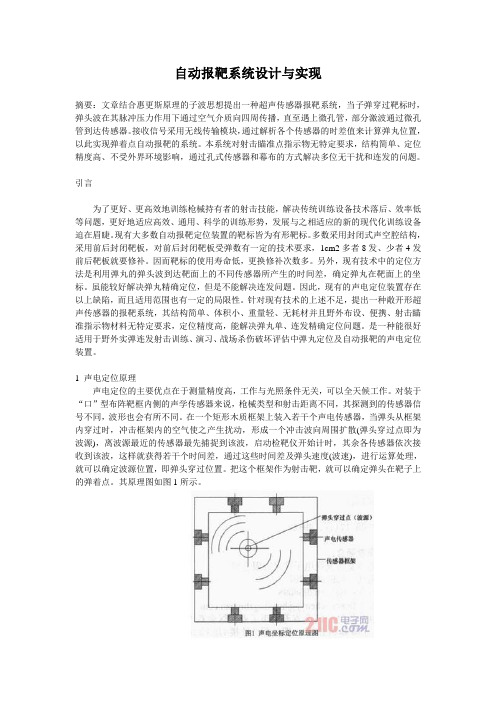
1 声电定位原理声电定位的主要优点在于测量精度高,工作与光照条件无关,可以全天候工作。
对装于“口”型布阵靶框内侧的声学传感器来说,枪械类型和射击距离不同,其探测到的传感器信号不同,波形也会有所不同。
在一个矩形木质框架上装入若干个声电传感器,当弹头从框架内穿过时,冲击框架内的空气使之产生扰动,形成一个冲击波向周围扩散(弹头穿过点即为波源),离波源最近的传感器最先捕捉到该波,启动检靶仪开始计时,其余各传感器依次接收到该波,这样就获得若干个时间差,通过这些时间差及弹头速度(波速),进行运算处理,就可以确定波源位置,即弹头穿过位置。
2019电视报靶中的自动卷靶机设计设计.doc
电视报靶中的自动卷靶机设计毕业设计第一章前言随着我国国防工业现代化轻兵器靶场测试及野外实弹演习应用方面产生了轻兵器靶场采用自动卷靶和电视报靶代替人工报靶技术,是轻兵器精度测试技术中的重大工艺改进。
这一技术的出现,不仅仅使轻兵器靶场的测试人员从人工挂靶,传递靶纸、验靶纸、糊靶纸等繁重的工作中解脱出来,而且还为国家大大节约了人力、物力、财力和时间,同时也为工作人员的身心健康提供了保障,具有很好的社会效益和经济效益。
本装置的特点是验靶迅速,不会出现试验与靶纸不一一对应的差错,随打随验、操作简单、安全可靠、避免了验靶时子弹过多浪费,因为对脱靶或精度较低的试验枪可及时调整准星。
另外,不需要专业的挂靶人员,解决了工作人员长期在阴冷潮湿的地下室工作所引起的一系列职业病,节省了社会劳动力,保障了工作人员的身心健康。
此装置采用了幻灯技术,不但使靶纸图像清晰可辩,而且降低了靶纸的质量要求和成本,节约了制作固定靶纸用框架的木材,还可使靶纸充分利用。
自动卷靶机的卷、倒靶和张紧靶纸的控制均采用了三相鼠笼式感应电动机,方便耐用,易维修,尤其是张紧靶纸电机工作在堵转状态,这在感应电动机的实际应用中实属少见。
本装置经有关单位实际应用,证明是切实可行的。
第二章兵器靶场采用电视报靶的设计方案2.1 方案设计示意图(见图<1>)图〈1〉设计方案总图图(1)所示为测试靶场具有多个靶口的设计方案。
该方案中将卷靶机构与张紧靶纸机构均安装于地下室,考虑到当一条靶纸纸带及控制系统出现鼓掌需要维修,可于地下室进行,而不必中断其他靶口的实验。
若靶场只有一个靶口,亦可将卷靶机构和张紧机构分别安置于屋顶上方和地下室两处。
2.2幻灯技术和靶纸技术由于整个靶场建造得具有很好的挡光性能,因此,地下室与其上方悬挂靶纸相当于一个暗室。
采用普通幻灯机将特制的靶纸幻灯片打到靶纸上时,靶纸上可以呈现清晰标准的靶纸图形。
2.3 摄影机和工业电视的应用过幻灯片得到靶纸图形被摄象机摄取后转换为电信号通过电缆传输给工业电视,则在电视屏幕上呈现出清晰可见的完整靶纸图形,可直接观察靶纸情况,随打随验兵器是否合格。
基于单片机控制的自动报靶系统设计
1 引言1.1 课题研究背景及发展方向在军队射击训练和各种体育射击比赛中,示靶、检靶、报靶和成绩的记录统计,是训练和比赛过程中的主要保障工作。
目前,这些保障工作大部分还是依靠人工来完成的。
人工报靶有着工作量大、效率低、安全性差的特点。
想要提高射击比赛或训练中报靶的效率,最主要是要解决自动报靶的问题[1]。
因此,设计制作并采用安全有效的自动报靶系统具有重要的现实意义也是迫切的现实需求。
当今较为先进的报靶系统包括光电坐标靶、图像处理坐标靶、CCD线阵靶、声电坐标靶、光纤编码坐标靶刚、双电极短路坐标靶等[2][3]。
但以上这些方法也存在着各自的不足:有的技术过于复杂、有的不能用于野外实弹射击报靶、有的成本过高、有的着弹实报率较低、不适用于连发射击训练等缺点。
目前应用较多的还有红外光电定位测试、基于图像处理模板匹配法、基于声电坐标定位法、基于光纤编码定位法、广义Hough变换法(基于图像处理)、面阵CCD 精度靶等报靶系统,都是较有效的测试方法[3]。
近年来发展起来一种新型智能自动报靶系统,与传统的实弹射击准备工序繁琐且隐藏着极大的安全隐患比较,利用这种报靶系统开展的训练将会更安全高效。
这一智能自动报靶系统由主机、从机、靶面传感器三部分构成。
具有可对射击过程全程监控,并作数据处理、自动统计以及查询成绩等功能,还可对射手存在的问题作出分析,极大地提高了训练效率[4]。
可以预见,这种新型智能自动报靶系统将会在不远的将来取代传统自动报靶系统并向更加智能化、自动化、数字化方向发展,它将可能成为未来研制报靶系统的新趋势。
1.2 基于激光坐标定位法实现的自动报靶系统简介激光坐标定位法在一些资料中也称为光电坐标定位法,光电靶是由X、Y两个方向上的激光网络构成,如图l 所示。
图1.1 光电靶将普通靶纸置于激光网络之前并与之同轴,当子弹打破靶纸,并穿越激光网络时,会阻断相应位置处X和Y两个方向上的各一路激光,从而使接收装置(光敏管)开关状态发生变化[5][6]。
自动报靶方法与设备
自动报靶方法与设备一、背景:目前, 在部队射击训练、考核和比赛中, 示靶、检靶和成绩记录主要依靠人工完成, 这样不但效率低、可靠性差, 而且存在安全隐患【1】。
因而在很大程度上影响报靶的结果,不仅判靶效率低,而且不利于射击者准确地了解自己的成绩,不利于打靶水平的提高。
射击精度是衡量枪械类轻武器性能的一个重要指标,因此,对自动报靶方法与系统的研究具有非常重大的意义。
二、自动报靶的分类:为适应科技强军的需要,国内有许多单位对自动报靶系统进行研究,相继开发出多类射击自动报靶系统。
根据自动报靶的技术实现原理,可分为电极埋入方式、光电传感方式、图象处理方式和声电定位方式四种方式。
另外,市售的自动报靶系统根据检测手段可分为:金属片(或其他导电体)连通检测和图像识别两种方式。
1、电极埋入式自动报靶系统1.1电极埋入式自动报靶系统的工作原理工作原理:是在特制靶体的生产过程中,利用特殊的工艺,将一个由电极组成的二维网格埋入靶体的夹层里面。
当在垂直和水平方向上,每两根电极之间的间隔小于弹丸直径时,每次弹丸击穿靶体都会切断至少两根的电极。
通过测量不同编号的电极间电阻值变化就能确定弹丸击中靶体的位置,进而形成弹点坐标,判定环数。
1.2电极埋入式自动报靶系统的优缺点:①优点:响应速度快;报靶精度高。
②缺点:这种判靶方式是一次性的,每次射击后靶体即告报废。
因此,电极埋入式报靶系统成本过高。
2、光电传感方式自动报靶系统2.1光电传感方式自动报靶系统的工作原理:是在光电传感式自动报靶系统中,在靶体的四周以垂直方向和水平方向对应安装两套高灵敏度的光电收发装置(如发光二极管和感光二极管)。
这两组排列密集的发光器件所发出的光线将靶划分为矩阵式的网格状。
每个小网格对应着靶上的一个方形区域。
每一组垂直方向和水平方向光电器件编号的组合,就是靶上对应点的坐标。
在每组相邻的光电器件间距小于弹丸直径的情况下,每次弹丸通过靶体的瞬间,都会在垂直方向和水平方向上切断至少两根的光线,光线的明暗变化又使感光器件的电气参数(如输出电平)发生变化。
防暴弹投掷自动报靶系统的设计与实现
防暴弹投掷自动报靶系统的设计与实现摘要:本文针对武警部队防暴弹投掷的科目特点做了深入详细的分析,在此基础上设计出一套由STM系列单片机、气压检测模块、无线传输模块、语音播报模块、显示模块、存储模块组成的防暴弹投掷自动报靶考核系统。
通过感知气囊式拼接的地环靶的气压变化,气压传感器能够迅速、准确检测到防暴弹的落点位置,并通过无线模块将数据从感知端传输至控制端,经STM单片机处理后控制显示模块、语音模块、存储模块,显示屏显示落点位置和投掷成绩,并通过语音模块播报环数成绩,存储模块对数据实时存储记录。
本设备能科学、准确、实时地检测投掷考核人员的环数成绩,并且客观、公正地记录训练成绩,有效地指导防暴弹投掷训练以及应用于防暴弹投掷考核,满足信息化建设及训练考核的需求。
关键字:防暴弹投掷;气压传感器;自动报靶;引言防暴弹投掷是武警部队的通用科目,由于受到场地和设备的限制,目前武警部队对于防暴弹投掷报靶依然是以传统的人工报靶为主,但是这种方式主要有两个弊端,一是由于抛出的弹体速度极快且着地反弹会带来跳动,投掷完成后的弹着点并非其真实位置,导致报靶人员无法精准判定落点位置,也存在视力疲乏等人为因素而导致误报和漏报,并且报靶效率很低;二是投掷防暴弹时方向和力度都不容易掌控,弹体很可能偏离地环靶区域,导致保障人员在报靶时被弹体击中,造成不必要的非战斗减员。
因此有必要研发一套针对武警部队防暴弹投掷科目的自动报靶系统,帮助基层解决实际问题。
1系统总体结构设计本设计分为检测端和显示端两个部分,通过无线通信的方式进行连接,整个系统由单片机、压力采集模块、无线通信模块、存储模块、显示模块、语音模块六个部分,系统整体框1.主控模块设计STM32单片机处理能力强,运算速度快,可以进行高速通信、512k的RAM存储和64K的RAM、外设功能几十个,适合大中型系统设计。
STM32F103C8T6单片机是STM32系列单片机中最具有代表性的,在接近13年的应用中,其稳定性是经受过实际考验的,是目前国内使用最多的Cortex-M3内核单片机。
基于嵌入式智能报靶系统的设计
基于嵌入式智能报靶系统的设计摘要:在我军的的军事训练当中,最基本的训练就是射击训练,良好的射击成绩是对一名战士的基本要求,目前我军无论是基层还是院校射击训练主要采用人工报靶的方式,这种传统的报靶方式不仅效率低下、存在安全隐患,而且在训练考核中存在一定的不公平性,不符合我军的训练原则。
因此研发一种高效率、高精度,并且安全性强的自动报靶系统迫在眉睫。
这不仅能够推动科技化军事的发展,而且在体育射击运动中的应用前景也是十分可观的。
为了解决人工报靶的一系列问题,本文提出了一种基于嵌入式的激光光幕自动报靶系统的设计方案,并设计出了实物模型。
该系统由激光发射器和激光接收器构成激光网络进行弹丸信号检测,以STM32为核心的信号处理电路对检测信号进处理,得到弹着点的坐标信息并通过无线通信的方式上传至上位机显示并记录成绩。
该系统成本低、精度高、安全可靠,具有一定发展前景。
关键词:嵌入式,自动报靶,STM32,激光器,弹孔识别,激光幕1 靶面的设计原理靶面结构如图1所示,实心方块一侧表示激光发射器,对面表示激光接收器,实线表示激光光束,靶面就形成了一对一对的激光发射、接收对,将靶面按照一定的间隔分为等距的网格,形成一道光幕。
当子弹穿过由激光束构成的靶面时,将遮断相应数目的激光束,被遮断的激光束对应一端的探测器将会输出电脉冲信号,主控制器根据探测器的信号变化得到相应的信息,从而计算出弹着点的坐标[1]。
图1 下位机系统实物图2 系统的整体设计思路随着高速处理器、嵌入式操作系统为核心的信息处理系统和无线传输系统的应用日益广泛,自动报靶系统逐渐出现在日常的军事训练与体育竞技之中。
现如今利用PC机作为电子控制终端的应用技术己经成为未来科技发展的一大趋势[1]。
本文针对工业活动和人们日常生活中常用的PC机,介绍了一种利用PC上位机来控制的新型光电自动报靶系统。
通过STM32作为自动报靶系统的主控制器驱动靶机的检测模块工作,从而获得上靶信息。
自动射击报靶装置
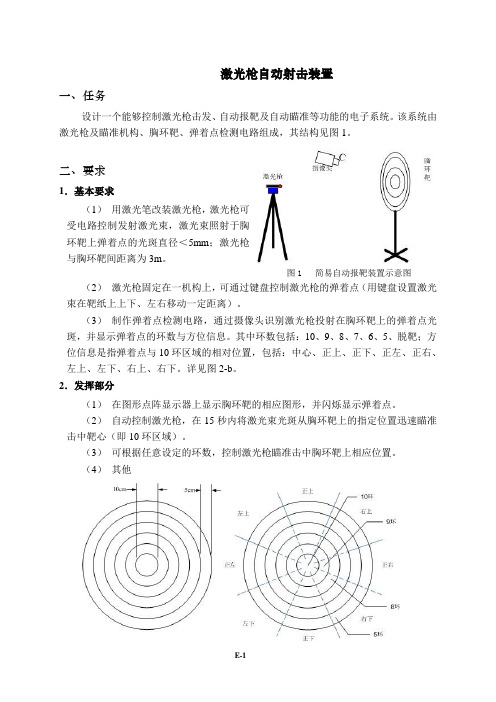
激光枪自动射击装置一、任务设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,其结构见图1。
二、要求1.基本要求(1)用激光笔改装激光枪,激光枪可受电路控制发射激光束,激光束照射于胸环靶上弹着点的光斑直径<5mm;激光枪与胸环靶间距离为3m。
图1 简易自动报靶装置示意图(2)激光枪固定在一机构上,可通过键盘控制激光枪的弹着点(用键盘设置激光束在靶纸上上下、左右移动一定距离)。
(3)制作弹着点检测电路,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
其中环数包括:10、9、8、7、6、5、脱靶;方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。
详见图2-b。
2.发挥部分(1)在图形点阵显示器上显示胸环靶的相应图形,并闪烁显示弹着点。
(2)自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心(即10环区域)。
(3)可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
(4)其他2-a 胸环靶尺寸2-b胸环靶环数及方位信息示意图2 胸环靶示意图三、说明1.激光枪可以由市场上的激光笔改造,由电路控制击发;每次击发使光斑维持3~5s时间,但此期间不得移动光斑。
2.可采用步进电机、舵机或直流电机等机构对激光枪进行两维控制,以实现瞄准。
激光枪及相关机构可由支架支撑。
3.胸环靶是在不反光的白纸画有一组相距5cm的同心圆(线宽不超过1mm),最内圆环直径10cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶。
胸环靶上不允许设置摄像头以外的传感器。
4.当激光枪的弹着点落在胸环靶的环线上时,报靶时采取就高不就低的原则。
例如,弹着点在8环与9环之间的环线上时,则认为是9环。
5.在不影响靶纸上圆环线的前提下,允许在靶纸上做标记。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录摘要 (I)关键字 (I)Abstract (I)Key word (I)1引言 (1)1.1自动报靶在国内的研究 (1)1.2基于图像处理技术自动报靶系统 (1)1.3研究的意义 (2)2传感器物理特性分析 (2)3 交汇测量原理简介 (3)4 数据储存 (4)4.1 CCD信号的处理和检取 (4)4.2 S/H和ADC选择 (4)4.3 信息压缩与储存 (5)4.4 地址发生器 (6)4.5 子弹成像点的确定 (7)4.6 交汇角的计算 (7)5 数据处理 (7)6 总结与展望 (8)6.1总结 (8)6.2展望 (8)参考文献 (9)致谢 (10)自动报靶系统的设计摘要针对于军事射击的项目特点,起于数字图像的处理、识别技术,给出了自动报靶系统的设计方案和实现的算法。
这个系统通过了对图像采集、图像处理、弹孔提取和环值判定,去实现自动报靶、数据管理(包括统计、记录、分析)等功能。
关键字图像处理;系统设计;图像采集;自动报靶Design of automatic target scoring systemAbstractAccording to the characteristic of the military rifler,a scheme of automatic target-scoring system is presented in this paper,based on digital image processing and recognition technology.This system can realize the function of automatic target-scoring and date management(statistics,record,analysis)etc,by image gathering,image process,and bullet-spot’s recognition and scoring.Key wordAutomatic Target-scoring;Image Process;System Design1引言传统的报靶主要依靠是人工实现,存在的精确度不高、安全隐患比较大以及人力资源分配的不足。
现在的市场上一些关于自动报靶的产品中应该普遍成本高、系统比较复杂,并且占用场地等一些缺陷。
就目前来说,弹丸中靶的坐标测量普遍都采用弹丸穿过实心靶留下弹痕,射击者使用望远镜或借助于闭环电视系统估算出每一弹丸的中靶坐标。
这设计的自动报靶系统是一种对着靶位置进行自动测量的系统,采用确定在光学经纬仪上的CCD期间作为探测元件,弹丸经有效靶面才在CCD上面成像,经过视频放大、ADC转换、数据处理等送入微机,通过正交汇的原理可计算得出弹丸着靶的精确位置坐标。
这种测量方法效率很低,测量精确度差。
1.1自动报靶在国内的研究自动报靶是跟随着现在的科学技术的进步发展起来的很新型报靶技术。
目前,我国军中的设计训练器材的性能情况还很落后,大多数都是人工报靶,只有少数是自动报靶系统。
其中原因有二点:第一是自动报靶系统的科技含量高,成本相对较高;二是少数模拟训练系统,只能去自己模拟训练,不能进行实弹射击,训练的质量还难以保证,因为这个,射击训练器材重心放在真正使用的自动报靶系统的研发上。
二是目前国内的自动报靶系统技术还不够成熟,系统环境的适应性差、性能单一,不能满足部队训练需求;为适应科技强军的需求,国内有许多企业对这进行研究,相继开发出多类射击自动报靶系统。
这此产品按其功能的实现可以分为:声电定位自动报靶系统、半导体电子靶系统、基于图像处理技术的报靶系统。
1.2基于图像处理技术自动报靶系统根据图像处理技术的迅速发展壮大和计算机运算速率的不断提升,数字图像处理技术,尤其是图像识别技术已经在诸多领域中得到了相当之广泛的应用。
例如,汽车自动驾驶系统、人脸识别、指纹识别与匹配系统等都是图像识别技术在现实生活中的典型应用。
“基于图像处理技术的自动报靶技术”就是这样一个包括了图像采集、图像识别和数据处理的典型系统。
自动报靶都是采取图像处理有关技术来进行实现,这个产品是根据计算机图像的识别的处理为基本。
在实弹进行射击过程中,它是通过摄像头对常规标准靶图像进行采集,根据采集来的靶图像的变换和特点,通过计算机图像识别技术来确定出靶图像的真实弹点,然后利用判定弹点再靶中的具体位置来确定弹点的中环位数。
对于不同的靶位上的每一次射击都采用完全相同的算法、规则和精确度来进行对比、比人工报靶更客观,更公正,有非常高的可用性。
使用这样一种自动报靶系统就好比是使用了一个“电子烟”,它会替代报靶人员的眼睛,在实弹射击的过程当中不间断的对靶面进行精确地测量。
1.3研究的意义自动报靶系统不只是在提高射击效率、节省人力和避免报靶时的人员安全隐患的同时,并且能自动进行统计并且显示出射击成绩,确保射击成绩的真实性,实现迅速、准确的落点报告。
图像处理类在成本上基本只需要摄像头和计算机,而且伴随着图像处理新技术。
随着新方法的连续提出,有一种声电定位报靶和半导体电子报靶这两类产品在技术上的不足制约了它们在部队中作为平时训练使用的普遍性,所以研究低成本,精度高和适应能力强的自动报靶系统成为部队所追求的产品,在报靶精度和适应性上也将逐渐满足军队要求,所以研究基于图像处理的军用报靶系统对于部队现代化具有推进作用,在部队的应用中具有极其广阔的前景。
2传感器物理特性分析报靶系统是由传感器(特制的头靶、胸靶、胸环靶、身靶)进行数据采集、精确检测到击中靶子的信号是成功自动报靶的关键,这个系统的报靶传感器使用一种特制的靶子,它的双面各有一层导电橡胶体或其他导电的软质材料,反面的导电橡胶接连地线,正面的一层橡胶按胸环靶样式用绝缘材料割成不同的环位和方位区域,而且在不同的区域分别引出信号线。
当子弹通过靶子的瞬间,靶子双面的导电橡胶层接通,此刻在相应区域的信号线上就能产生接地的脉冲信号,靶的8个环位和8个方位总共16种脉冲信号同时输出。
胸靶结构的示意图如图一所示。
设靶子的厚度是0.02m,弹速是400m/s,所以输出的接地脉冲宽度低于50us。
为了能够精准的检测,就一定要对这些脉冲信号进行整形和展宽前期信号的处理,用CPLD技术对数据采集好并且处理的实现,引出较常规的数据处理相比,引出同时使用简易和减少产品造价,数据采集板还要实现从并行到串行之间的转换。
3 交汇测量原理简介交汇测量原理如图1所示,有CCD摄像机和经纬仪成角测量系统,测量飞行弹丸空间角的位置;图1中CDEF位有效靶面,P位弹着靶面,以靶心O为原点,AB=L位基线,有y1=PG-OO1,x1=AG-AO1,令Y=PG,X=AG,则y1=Y-OO1,x1=X-AO1,三角函数变换知X1=AOL-+)(βαβαsinsincos1(1)Y1=OO-+)(βαβαsinsincosL1(2)其中α,β由光电经纬仪测出4 数据储存系统框图如图2所示,CCD视频信号放大滤波、S/H、二值化、A/D及DMA等一系列的措施存入单片机的系统内存,同时实行数据处理,单片机系统同时设置了对应的功能键,控制数据的显示与采集。
4.1 CCD信号的处理和检取因为目标最小的过靶时间为70us,CCD器件的主频最多在10MHz。
考虑到目标通过系统后在CCD器件上能呈现两个像元数,系统采用了日本松下公司的2592位线阵CCD MN8061A.其像元间距14us;当主频位10MHz时行积分时间为262.8us;在目标对象最小过靶的时间为70us时,呈像积分时间(占空比)是0.3,CCD驱动电路运用公司为MN8061A 配套配置的MN8061A驱动板。
CCD模拟信号在单个目标越过靶位时信号基频为3.8kHz,通过对模拟信号幅度真实有效的5次以内谐波的考虑,视频通道带宽为20kHz。
多个目标时,最多在一行之中有3个目标,但频率跌和,带宽约需30kHz。
高于这个数值的大多呈显背影信号,电路中可以滤除。
4.2 S/H和ADC选择依据以上的参数,视频放大选用AD521,低滤波选取TC36376.从主频10MHz和逐像元采样开拔,ADC转换的速度超过10MHz。
本系统试量目标的CCD模拟信号的电压变化梯度很大,所以在ADC之前设S/H。
4.3 信息压缩与储存实现CCD数字信号的快速储存是这个系统的关键技术。
CCD输出视频信号的位处理时间仅需100ns,如果想到位处理时间大于S/H时间、RAM时间和ADC时间之和的关系,储存时间应该低于20ns。
采取对CCD视频信号进行二值化和ADC双重处理方法(DMA技术)。
原理如图3所示。
DMA由8只8D暂存器和相对应的8组RAM以及地址发生器3部分组成,RAM 的容量可跟据需要抉择。
图示这种情况下,RAM位8 k b*8,可储存24行CCD数字信号,8D暂存器可运用74HC系列74HC373,其数字设立时间为20ns。
DMA工作的历程:8D暂存器的食醋胡控制端接R/W信号,R/W信号还通过8个8线三状态暂存器管制DMA和计算机数据总线路道,两个8拍分配器输出的时序一样,地址发生器位16位,高13位输入RAM,低3位输出8拍分配器,所以每8个时钟脉冲8组RAM地址同时升一位。
对于顺序输入的CCD视频数值信号每一位,只允许由被8拍分配器置”+”的一组8D 暂存器转存,转存的时间是20ns。
转存的数字信号,包含转存时的稳定过程,由于8D 暂存器的输出端处于允许输出的状态,并且会一并显现在输出线上,但此时与之前8D 暂存器,相对应的RAM处于抉择之外(CS=1),RAM处于拒存的状态,当且仅当下一个时钟输入之后,才会处于写入状态。
所以,对于每一次输入到CCD的数值信号仅用20ns存入暂存器,同时入手对RAM 写入,对RAM的写入时间长达700ns,实现了数据的高速传输。
4.4 地址发生器地址发生器是由4片8位双移位暂存器74HC198组成,其中的两片输出缓存置于导通状态,是用于产生16位地址,另两片是用来地址记忆,原理如图4.如果现在CCD输入行中出现了二值信号,D触发器置1,在当前行结束,也将下一个同步脉冲到来时,IC1和IC2强行在下一行起始的地址输入记忆,同时在行同步脉冲有效期间又转存IC1和IC2,因为两者无差别,该转存的过程没有意义,地址在同步脉冲之后继续运行。
如果下一行没有二值化信号,IC1和IC2写入该行末尾的地址。
IC1和IC2在同步脉冲作用期间向IC1和IC2并行输入依旧是该行的起始地址,因此DMA对没有二值化信号的CCD行重复在原地址进行依次刷新,直到下一个有二值化信号的CCD 行储存之后才转入下一地址。