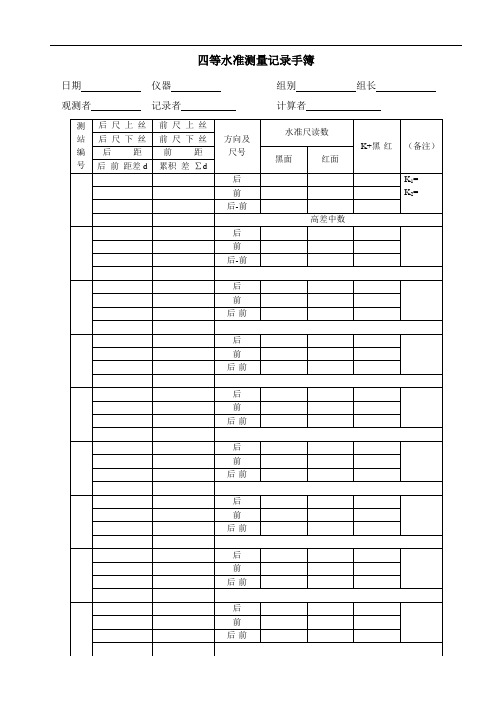
图根水准测量记录手薄
测量学水准测量
w2然019后/8/23单独转动脚螺旋③使气泡居中。如有偏差可重复进行30 。
3.瞄准水准尺
目镜对光:对准白色目标,旋转目镜,使十字 丝成像清晰。
粗略瞄准:缺口、准星、目标(尺)三点一线, 制动望远镜。
物镜调焦(对光):转动物镜调焦螺旋,使目 标成像清晰。
已知点和未知点之间的高差,再根据已知点的 高程推算出未知点的高程。
水准测量原点 :直接由平均海水面测得高程的 水准点(图2-J)。
2019/8/23
3
2019/8/23
4
二、高程测量的方法
水准测量:利用水平视线来测量两点之间的高差。
此方法施测简单,且精度较高,所以是高程测量中最 主要的方法,被广泛应用于高程控制测量、工程勘测 和各项施工测量中。
目
录
第 第 第 第第 第第第 八 七 六 五四 三二一 节 节 节 节节 节节节
电精精分水和水水器水水高
子密密析准校准准及准准程
水水水 测正仪测使测测测
准准准 量 的量用量量量
仪尺仪 的 检的 的原概
简 和 误 验方 仪理述
介
差
法
2
§2-1 高程测量概述
一、高程测量
高程测量:测量地面点高程的工作。 目的:获得未知点的高程。一般是通过测出
2019/8/23
20
水准仪图像(1)
注意:转 动仪器时 要松开制 动螺旋!
2019/8/23
21
水准仪图像(2)
注意:转动仪 器时要松开制
动螺旋!
2019/8/23
22
1.望远镜
作用:它可以提供视线,
测量技术基础-习题库答案

测量技术基础——习题库答案第一章测量学的基础知识填空题1、铅垂线2、水准面3、参考椭球面。
4、X5、真北方向、磁北方向、坐标北方向6、180°7、5008、平均9、637110、303°2011、129°12、水平角,取值范围为0~±90°。
13、1.61914、整体到局部高级到低级。
控制后碎部15、1.8716.水准面17. 72.289,72.260418.距离测量- 高程测量- 角度测量19.0,10020.高差单选题1、B2、A3、C4、B5、D6、B7、C8、D9、C10、B11、C12、C13、A14、D15、A16、A17、B18、C19、B20.A21.C22.B23. B24. B25. B26 A27 B28.D29.C30A31.A32C33B34B35C36D37D38A39C名词解释1、真北方向——地面P点真子午面与地球表面交线称为真子午线,真子午线在P点的切线北方向称真北方向。
2、水准面——处处与铅垂线垂直的连续封闭曲面。
3、测定——使用测量仪器和工具,通过测量与计算将地物和地貌的位置按一定比例尺、规定的符号缩小绘制成地形图,供科学研究与工程建设规划设计使用。
4、测设——将在地形图上设计建筑物和构筑物的位置在实地标定出来,作为施工的依据。
5、直线定向——确定地面直线与标准北方向的水平角。
6、直线的坐标方位角——直线起点坐标北方向,顺时针到直线的水平夹角,其值应位于0°~360°之间。
7、大地水准面:是指与平均海水面重合并延伸到大陆内部的水准面。
是正高的基准面。
8 绝对高程:指地面点沿垂线方向至大地水准面的距离。
9 相对高程:假定一个水准面作为高程起算面,地面点到该假定水准面的垂直距离称为相对高程,又称为假定高程。
10.象限角:由标准方向的北端或南端量至某一直线的水平角称为象限角。
计算解答题1、设A点高程为15.023m,欲测设设计高程为16.000m的B点,水准仪安置在A、B两点之间,读得A尺读数a=2.340m,B尺读数b为多少时,才能使尺底高程为B点高程。
水准测量记录表【范本模板】
水准测量记录表
班级:组别:测量:记录:计算:
水准测量记录表(2)
班级: 组别: 测量: 记录: 计算: 日期:
按测站数调整高差闭合差及高程计算表
按路线长度调整高差闭合差及高程计算表
测回法观测手薄
班级:组别: 测量:记录:计算:日期:
注意事项:1)记录表请填写字迹工整、内容完整、格式正确.
2)每一测站第一测回时第一次读数应调整至0°稍大一点度数位置,第二测回时第一次读
数应调整至90°稍大一点度数位置。
表7—2 各级导线测量的主要技术要求
三、四等水准测量手薄(双面尺法)。
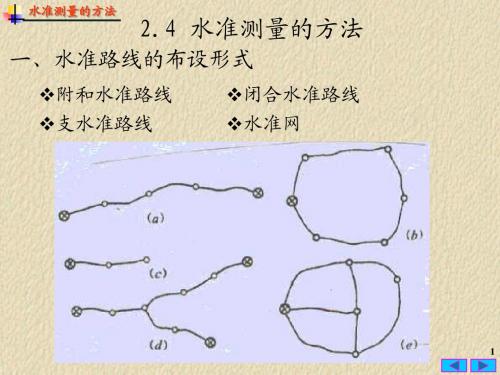
2.4水准测量的方法
f h h1 h2
高差闭合差的容许值——fh容 •图根水准测量
平地: f h容 40 L (mm) 山地: f h容 12 n (mm)
•四等水准测量
平地: f h容 20 L (mm) 山地: f h容 6 n (mm)
6
水准测量的方法
水准测量的方法
2.4 水准测量的方法
闭合水准路线
水准网
一、水准路线的布设形式
附和水准路线
支水准路线
1
水准测量的方法
二、水准测量的施测方法
2
水准测量的方法
表2-1 观测日期 观测者
测 站 Ⅰ II III Ⅳ 测 点 BMA TP1 TP1 TP2 TP2 TP3 TP3 TP4 TP4 BMB 后视 1.339
计算检核
h a b HB H A
测站检核
•变动仪器高法 •双面尺法
成果检核
高差闭合差——fh
各测段实测所得的高差代数和与其理论值之间的差值
5
水准测量的方法
•附和水准路线
f h h ( H 终 H 起)
•闭合水准路线
f h h
•支水准路线
f h h往 h返
水准测量记录手簿(二) 天气状况 仪器编号 记录者 校核者
高 + 差 - 高 程 51.903 0.063 0.231 0.535 0.105 0.396 0.994 ∑h=+0.994 HB—HA=+0.994
4
备 注
已知A 点高程
52.897
∑a—∑b=+0.994
水准测量的方法
三、水准测量的检核
51.903
测量学 课后答案 (杨松林 杨腾峰 师红云 著) 中国铁道出版社
1
C D O A A B
(45 12 47.4) 0 00 00 45 12 46.8 0 00 00 286 10 45.6 -0.9 106 10 45.2 60 57 57.8 60 57 56.7 334 46 09.4 -8.1 154 46 05.4 109 33 18.0 109 33 20.3
2
C D A
201 06 05.8
45 12 47.6
21 06 11.3
-5.5 201 06 08.6 155 53 21.2 155 53 20.1
45 12 47.9
15
225 12 48.2 -0.6
16.表3-9是一竖直角观测记录,试计算目标A、B的竖 直角及仪器的竖盘指标差。
表3–9 竖直角观测记录表
24
7) 钢尺量距时钢尺尺长不准、温度的变化:
系,前两项可用加改正数的方法消除。 8) 拉力的变化,定线不准:系,前者可加拉力计, 后者经纬仪定线。 9) 对点及投点误差:偶,往返测重新对点及投点。 10) 角度测量时经纬仪上主要轴线互相不垂直:系, 视准轴误差、横轴误差、度盘偏心误差、竖盘指 标差可用一测回测角取均值消除,竖轴误差可用 经纬仪整平的方法(照准任何目标,气泡偏移量 总是总偏移量的1/2)来消减 11) 经纬仪对中不准、目标偏心:系,仔细对中整平。
2c ″
平均 方向值 °′″
归零 方向值 °′″
各测回归零 方向值之平 均值 °′″
+3.5 (0 00 19.8) 0 00 00 0 00 18.6 240 58 13.7 +3.4 60 58 15.4 60 57 55.6 289 33 43.9 -2.9 109 33 42.4 109 33 22.6 335 53 39.2 -0.7 155 53 38.8 155 53 19.0 180 00 23.0 -4.0 225 12 48.9 -4.2 0 00 21.0
三四等水准测量记录手簿.doc

仪器记录表检查验收表过程检查意见:(签名或盖章)年月日最终检查意见(签名或盖章)年月日验收意见:(签名或盖章)年月日重要问题记载表水准观测说明与规范(一)观测方法1. 三等水准测量采用中丝读数法进行往返测。
当使用有光学测微器的水准仪和线条式因瓦水准标尺观测时,也可进行单程双转点观测。
2. 四等水准测量采用中丝读数法进行单程观测。
支线必须往返测或单程双转点观测。
(二)设置测站要求三、四等水准测量采用尺台作转点尺承。
观测应在标尺分划线成像清晰稳定时进行,若成像欠佳,应酌情缩短视线长度。
测站的视线长度、视线高度等按表1规定执行。
(三)测站观测程序和方法1、三等水准测量每测站照准标尺分划顺序为:1)后视标尺黑面(基本分划);2)前视标尺黑面(基本分划);3)前视标尺红面(辅助分划);4)后视标尺红面(辅助分划)。
2、四等水准测量每测站照准标尺分划顺序为:1)后视标尺黑面(基本分划);2)后视标尺红面(辅助分划);3)前视标尺黑面(基本分划);4)前视标尺红面(辅助分划)。
3、一测站的操作程序:1)首先整置仪器竖轴至垂直位置(望远镜绕竖轴旋转时,水准气泡两端分离不大于1cm);2)远镜对准后视尺黑面,用倾斜螺旋导水准气泡准确居中,按视距丝和中丝精确读定标尺读数(四等观测可不读上、下丝读数,直接读距离);3)照准前视尺黑面,按2)款操作;4)照准前视尺红面,按2)款操作,此时只读中丝读数;5)照准后视尺红面,按4)款操作。
使用单排分划的因瓦标尺观测时,对单排分划进行两次照准读数,代替基辅分划读数。
4、自动安平水准仪的操作程序与气泡式水准仪相同。
每测站观测前,首先将概略整平水准气泡导至中央,然后按规定顺序照准标尺进行读数。
转镜水准仪的操作程序,应按规定顺序照准标尺,而将黑面和红面分划的观测分别在两个镜位(或摆位)进行。
5、三、四等水准测量,采用单程双转点法观测时,在每一转点处,安置左右相距0.5m的两个尺台,相应于左右两条水准路线。
图根控制测量实训任务与指导

图根控制测量图根控制测量分为图根平面控制测量和高程控制测量,图根平面控制测量采用图根导线形式,高程控制测量采用四等水准测量。
因此,图根控制测量实习任务包括图根导线测量和四等水准测量。
图根控制测量实习时间为1个周,一个大组内两个小组协商好,一个小组进行导线测量,另外一个则进行四等水准测量,完成任务后(2~3天),交换仪器。
一图根导线测量(一)使用的设备全站仪、棱镜、目标三角架、水平角记录手薄,计算器,铅笔或碳素笔。
(二)图根导线技术要求表2 导线测量技术要求等级导线长度(km)平均边长(km)测角中误差(″)测回数角度闭合差(″)导线全长相对闭合差DJ6 DJ2图根≤1.0M≤1.5倍测图最大视距20 1±40n(首级)±60n(一般)1/2 000注:表中n为测角个数;M为测图比例尺分母。
(三)图根导线略图及已知点1.线路1(路桥1)共9个点,成一附合导线,其中36、37、43、44为已知点。
图1 线路12.线路2(路桥2)共9个点,成一附合导线,其中43、44、49、E17为已知点。
图2 线路2(四)图根导线外业工作外业工作包括选择导线点、测量导线各边长度、测量各转折角、定向测量工作。
○1选择导线点,已有,此项工作无需再做。
○2测量导线转折角 由于导线转折角都是单角,因此采用测回法测量(注意:瞄准时要瞄准目标三脚架标签的底部)。
记录清晰、齐全;字码工整;计算准确;绝不能有涂改现象,记错划掉在旁边写上正确的读数或计算数据。
表1 记录表格注意事项:A.若测左角都测左角,测右角就都测右角;B.全站仪水平方向值读数设为HR ;C.测回法测角,上下半测回差限差为36″,若超限,检查对中、整平情况,重新观测,直至符合限差规定。
测站盘位 目 标读数 半测回角值 一测回角值O左A 0 01 12 57 17 3657 17 42B 57 18 48 右A 180 01 06 57 17 48B237 18 54D.每个角观测两个测回,测回差为24″。
四等水准测量记录手簿
尺号
水准尺读数
K+黑-红
高差
中数
后尺上丝
前尺上丝
后距
前距
黑面
红面
后前距差d
累积差∑d
后
K1=
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
测站编号
点
号
后尺下丝
前尺下+黑-红
高差
中数
后尺上丝
前尺上丝
后距
前距
黑面
红面
后前距差d
累积差∑d
后
K1=
K2=
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
误
差
计
算
水平角观测记录手簿(测回法)
日期天气仪器观测者记录者检查者
测站
竖盘位置
目标
水平度盘读数
°′″
半测回角值
°′″
一测回角值
°′″
备注
四等水准测量记录手簿
日期仪器组别组长
观测者记录者计算者
测站编号
后尺上丝
前尺上丝
方向及
尺号
水准尺读数
K+黑-红
建筑工程测量试题(精选刷题含答案)bfh

建筑工程测量考试试题(含答案)一、单项选择题1.水准点埋设深度不得小于( )米,且底部要埋设在水冻线以下( )米,才能防止水准点不受冻胀。
A .1B .10C .2D .0.5 答案:D2.视距观测时,望远镜视线应高出地面至少( )m ,以减少竖直折光对视距读数的影响。
A .1 B .0.5 C . 2 D .1.5 答案:A3.吊车梁重直度的允许偏差为( )梁高。
A .1/1000 B .1/750 C .1/500 D .1/250 答案:C4.建筑基线的主轴线定位点应不少于( )个,以便复查建筑基线是否有变动。
A .5 B .3 C .7 D .2 答案:B5.精度高于( B )的水准仪,称为精密水准仪,一般用于高程控制测量或特殊工程测量。
A .DS 6B .DS 3C .DS 2D .DS 1 33.在下面这个水准仪的十字丝分划板示意图中,( B )是中丝。
A .甲 B .乙 C .丙 D .丁6.下面各式,( D )是正确的。
A .H A +b=HB +a B .H A - a =H B - bC .h AB =H A -H BD .H A + a =H B + b7.经纬仪整平的目的是使仪器的( A )。
A .竖轴竖直,水平度盘处于水平位置 B .竖轴竖直,竖直度盘处于水平位置 C .横轴竖直,竖直度盘处于水平位置 D .横轴竖直,水平度盘处于水平位置甲62.下图是水准测量的示意图,如果水准点BMA 的高程为250.000m ,那么前视点的高程应为( C )。
A .251.685mB .251.200mC .250.485mD .249.515m8.测量工作的实质就是( C )。
A .测量角度B .测量距离C .确定地面特征点的位置D .确定地面建筑物的位置9.每个钢尺经过比长检定后都有一个( C ),用来表达在标准拉力下,钢尺的实际长度随温度变化的函数关系。
A .检定结果B .标准公式C .尺长方程式D .计算公式10.下列中的( C )属于偶然误差。
GPSRTK图根控制测量规范标准
GPS RTK图根控制测量规本标准是根据我国现阶段全球定位系统实时动态(RTK)测量的技术水平制定的。
本标准容涉与目前应用广泛的单参考站RTK测量技术和基于CORS系统的网络RTK测量技术。
本标准是在GB/T 18314《全球定位系统(GPS)测量规》、CJJ 73《全球定位系统城市测量技术规程》、GB50026《工程测量规》的基础上,结合生产实际的情况制定的。
全球定位系统实时动态(RTK)定位测量除应符合本标准的要求外,还应符合国家现行的有关强制性标准、规的规定。
全球定位系统实时动态(RTK)测量技术规1 围本标准规定利用全球定位系统实时动态测量(RTK)技术,实施平面一级、二级、三级控制测量和五等高程控制测量、地形测量的技术要求、方法。
其他相应精度的定位测量可参照本标准执行。
2 引用标准下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 18314全球定位系统(GPS)测量规CJJ 73 全球定位系统城市测量技术规程CH/T 2008-2005 全球导航卫星系统连续运行参考站网建设规CH 8016 全球定位系统(GPS)测量型接收机检定规程GB 50026 工程测量规GB/T 14912 1∶500 1∶1000 1∶2000外业数字测图技术规程3 术语3.1 实时动态测量(RTK) Real Time KinematicRTK测量技术是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。
在RTK测量模式下,参考站通过数据链将其观测值和测站坐标信息一起传送给流动站,流动站不仅采集卫星观测数据,还通过数据收来自参考站的数据,并在系统组成差分观测值进行实时处理。
测量学_课后答案_(杨松林_杨腾峰_师红云_著)_中国铁道出版社

9
附合水准路线成果计算(习题9图2-44)
测 段 点号 路线长度 (km) 测站 数 实测高 改正数 差 (mm) ( m) +0.735 -6 改正后 高差 ( m) +0.729 高 程 ( m)
1
BM16
1
0.23
47.185
47.914 0.26 +0.120 -6 +0.114 48.028 47.780 46.312 -0.873
1
C D O A A
2
B C D A
(45 12 47.4) 0 00 00 45 12 46.8 0 00 00 286 10 45.6 -0.9 106 10 45.2 60 57 57.8 60 57 56.7 334 46 09.4 -8.1 154 46 05.4 109 33 18.0 109 33 20.3
=22.9mm 2)加常数改正: D2= c = +4mm
19
3)乘常数改正: D3= b ×SAB=+2 ×0.89576=+1.79mm 4)改正后斜距:
S´=S+ D1 +D2 +D3
=895.760+0.0229+0.0040+0.0018=895.7887
5)水平距离:
DAB= S´ ×cos=895.7887 ×cos 253020= 808.4883 m
43= 23 + 3-180 +180 = 95 10 + 16520=260 30
23
第五章
思考题
3.说明由下列原因所产生的各种误差的性质及消 减方法:
系统误差判断:误差有规律可循,并可想法消除的误差。 答: 1) 水准测量时水准仪望远镜的视差: 系,用调焦来消除. 2) 气泡没有精确符合: 系,用整平来消除. 3) 水准仪的视准轴与水准管轴不平行:系,校正;前后视距相 等. 4) 估读水准尺不准、读数误差、照准误差、:偶, 重复观测 取均值可减弱误差的影响 5) 水准尺没立直: 系,摇尺法读最小数;水准尺装水准器 6) 水准仪下沉、尺垫下沉:系, 水准测量的方法:后前前后、 与往返测的观测方法分别消除二误差。
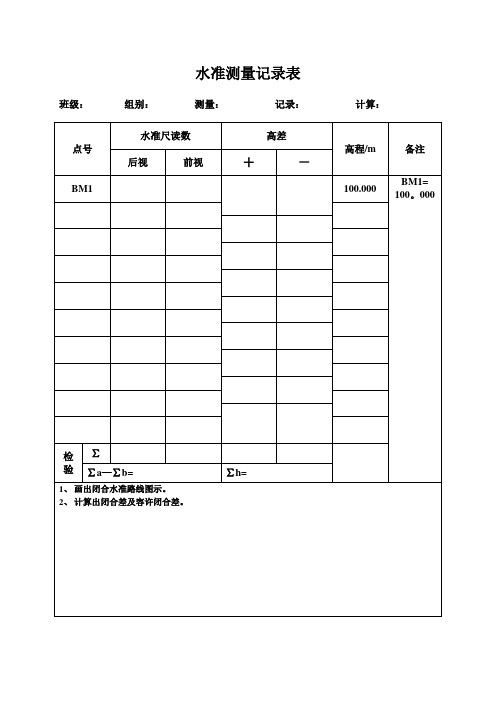
水准测量记录表

水准测量记录表
点号
水准尺读数咼差
高程/m 备注后视前视+ ——
BM1 100.000 BM1 =
100.000
检
验L a- E b= L h=
班级:组别: 记录: 计算:
1、画出闭合水准路线图示。
2、计算出闭合差及容许闭合差。
水准测量记录表(2)
班级:组别:测量:记录:计算:日期:
按测站数调整咼差闭合差及咼程计算表
按路线长度调整高差闭合差及高程计算表
测回法观测手薄
标准要求:上下半测回角值之差(盘左盘右角值差)不超过限值土 40 〃,两测回均值不超过±24 〃。
注意事项:1)记录表请填写字迹工整、内容完整、格式正确。
2)每一测站第一测回时第一次读数应调整至0。
稍大一点度数位置,第二测回时第一次读
数应调整至90。
稍大一点度数位置。
表7-2 各级导线测量的主要技术要求
三、四等水准测量手薄(双面尺法)。
GPS RTK图根控制测量规范

GPS RTK图根控制测量规范本标准是根据我国现阶段全球定位系统实时动态(RTK)测量的技术水平制定的。
本标准内容涉及目前应用广泛的单参考站RTK测量技术和基于CORS系统的网络RTK测量技术。
本标准是在GB/T 18314《全球定位系统(GPS)测量规范》、CJJ 73《全球定位系统城市测量技术规程》、GB50026《工程测量规范》的基础上,结合生产实际的情况制定的。
全球定位系统实时动态(RTK)定位测量除应符合本标准的要求外,还应符合国家现行的有关强制性标准、规范的规定。
全球定位系统实时动态(RTK)测量技术规范1 范围本标准规定利用全球定位系统实时动态测量(RTK)技术,实施平面一级、二级、三级控制测量和五等高程控制测量、地形测量的技术要求、方法。
其他相应精度的定位测量可参照本标准执行。
2 引用标准下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 18314全球定位系统(GPS)测量规范CJJ 73 全球定位系统城市测量技术规程CH/T 2008-2005 全球导航卫星系统连续运行参考站网建设规范CH 8016 全球定位系统(GPS)测量型接收机检定规程GB 50026 工程测量规范GB/T 14912 1∶500 1∶1000 1∶2000外业数字测图技术规程3 术语3.1 实时动态测量(RTK) Real Time KinematicRTK测量技术是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。
在RTK测量模式下,参考站通过数据链将其观测值和测站坐标信息一起传送给流动站,流动站不仅采集卫星观测数据,还通过数据链接收来自参考站的数据,并在系统内组成差分观测值进行实时处理。
测量学第1至6章作业答案(20210228121118)

第一章1.测量学的概念?建筑工程测量的任务是什么?测量学的概念:测量学是研究地球的形状和大小以及确定地面点位的科学。
它的内容包括测定和测设两部分。
(1)测定测定是指得到一系列测量数据,或将地球表面的地物和地貌缩绘成地形图。
(2)测设测设是指将设计图纸上规划设计好的建筑物位置,在实地标定出来,作为施工的依据。
建筑工程测量的主要任务:(1)测绘大比例尺地形图。
(2)建筑物的施工测量。
(3)建筑物的变形观测。
2.何谓水准面,其特性是什么?何谓大地水准面?它们在测量中的作用是什么?地球上任何自由静止的水面都是水准面,水准面有无数多个,水准面的特性是处处与铅垂线(重力作用线)垂直。
与平均海水面吻合并向大陆、岛屿内延伸而形成的闭合曲面为大地水准面。
水准面是测量工作的参照面,大地水准面是测量工作的基准面。
3. 何谓铅垂线?它们在测量中的作用是什么?重力的方向线称为铅垂线,它是测量工作的基准线。
4. 何谓绝对高程?何谓相对高程?何谓高差?已知H A=36.735m,H B=48.386m ,求h AB。
地面点到大地水准面的铅垂距离,称为该点的绝对高程(也称海拔),简称高程,用H 表示。
在局部地区,有时需要假定一个高程起算面,地面点到该水准面的垂直距离称为相对高程。
地面两点间的高程之差,称为高差,用h 表示。
h AB = H B-H A = 48.386-36.735 = 11.651m5. 何谓大地坐标?何谓高斯平面坐标?大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示的坐标,称为大地坐标,又叫地理坐标。
高斯投影是将地球地球表面划分成若干带,然后用中心投影的方法将每个带投影到平面上,称高斯投影。
在高斯投影面上以该带的中央子午线与赤道交点的投影为原点,以赤道位置为y 轴,规定向东为正;以中央子午线为x 轴,规定向北为正,这样建立起来的坐标系统即为高斯平面坐标系。
地面点在高斯坐标平面上的直角坐标称高斯坐标。
第2章 水准测量K
图2-13
3.基座
l 用于置平仪器,它支撑仪器的上部使其在水
平方向上转动,并通过连接螺旋与三脚架连 接。 l 基座主要由轴座、脚螺旋、三角压板和底板 构成。
调节三个脚螺旋可使圆水准器的气泡居中, 使仪器粗略整平。
(二)DS3微倾式水准仪的使用
微倾式水准仪的使用包括安置仪器、粗略整平、瞄准水准 尺、精平与读数等操作步骤。
第二章
学习难点:
水准测量
1、水准路线高差闭合差的调整和高程的计算 2、水准仪的检验与校正
§2-2 水准测量原理
一、基本原理 l 水准测量的实质:
测量两点之间的高差。 l 水准测量的基本原理: 利用水准仪建立一条水平 视线,借助水准尺来测定两 点 间 的 高 差 , 从 而 由 已知点的高程推算出未知点 的高程。
图2-7
1、物镜 2、目镜 3、物镜对光螺旋 4、管水准器 5、圆水准器 6、脚螺旋 7、制动螺旋 8、微动螺旋 9、微倾螺旋 10、轴座 11、三角压板 12、底版
1.望远镜
l 作用:它可以提供视线,
并可读出远处水准尺上的读数 l 构造:物镜、目镜、对光 透镜和十字丝分划板。 图2-8 1. 物镜:使目标的成像落在十字丝板前后。 2. 调焦透镜:使目标的成像与十字丝重合。 3. 目镜:放大十字丝和目标的成像。 4. 十字丝分划板:竖丝是为了瞄准目标, 中丝(单丝或楔形丝)读取读数。 视距丝:上、下短丝,用于测距。 l视准轴(即视线):十字丝交 点与物镜光心的连线。 它是水准仪的主要轴线之一。 DS3水准仪望远镜放大率一般为28倍。
§2-4
一、水准点
普通水准测量
l 水准点(Bench Mark),通过水准测量建立的 高程控制点,工程上常用BM来标记。 l 水准点的等级及埋设 水准点可根据需要设置成永久性水准点和临时性 水准点。 国家水准点分为一、二、三、四等四个等级, 按规范要求埋设永久性标石标记。三、四等水准 点一般用混凝土标石制成,深埋到地面冻结线以 下,在标石的顶面设有用不锈钢或其它不易锈蚀 的材料制成的半球状标志。(如图a)