桥式起重机的PLC控制系统设计开题报告综述
基于PLC、变频器的桥式起重机控制系统的设计

桥式起重机俗称行车,是工矿企业应用非常广泛的起重机械。
传统的桥式起重机为了提高起动转矩,采用绕线式异步电动机拖动,通过鼓形凸轮控制器的操作来改变其转子所串电阻调速。
随着新技术和控制设备的发展,现在人们普遍采用变频器作为变频调速电源,用笼形异步电动机取代原来的绕线异步电动机,用PLC作为控制装置进行无触点控制。
从而改善了调速性能,增加了系统的可靠性。
本文通过一个实例分析变频器和PLC在系统中的具体应用。
1、桥式起重机拖动系统1.1 桥式起重机的运行机构1)大车拖动系统拖动整台起重机顺着车间方向左右移动(以司机的坐向为参考)2)小车拖动系统拖动吊钩及重物顺着桥架作前后运动。
3)吊钩拖动系统拖动重物作吊起或放下的上下运动。
大型起重机(超过10t)有两个起升机构:主起升机构(主钩)和副起升机构(副钩)。
通常主钩与副钩不能同时起吊重物。
1.2 负荷特点桥式起重机的拖动系统负载都属于恒转矩性质,且其起升机构为位能性负载,当起升机构起吊重物下降或者快速减速运行时,电动机处于再生发电制动状态。
需要将电能通过反馈装置反送给电网或消耗在制动电阻上,以防直流处的泵升电压影响制动效果。
1.3 控制要求1)起升机构要求起动转矩大,起动运行平稳。
能够实现正反转运行且要有超载、限位、限流等多种保护。
2)起升机构在启停过程中易出现“溜钩”问题。
由于制动器从抱紧到松开,以及从松开到抱紧的动作过程需要时间(约0.65),而电动机转矩的产生或消失,是在通电或断电瞬间就立刻反应的。
因此,制动器和电动机在动作的配合上极易出现问题。
如电动机已经通电,而制动器尚未松开,将导致电动机的严重过载;反之,如电动机已经断电,而制动器尚未抱紧,则重物必将下滑,即出现溜钩现象。
因此要有相应的防止措施。
起升机构中要有机械制动器。
起重用变频器具有零速全转矩功能(又称零伺服功能,即零速时电动机仍能输出150%的额定转矩,使重物停在空中),但是若重物停在空中时出现电源瞬间停电等情况,就会有重物下滑的危险。
PLC和变频器桥式起重机控制系统设计毕业设计

PLC和变频器桥式起重机控制系统设计毕业设计毕业设计题目:PLC和变频器桥式起重机控制系统设计摘要:本文以桥式起重机为研究对象,通过PLC和变频器控制系统设计,实现对桥式起重机的自动化控制。
首先,对桥式起重机的工作原理和结构进行了详细介绍;然后,分析了PLC和变频器在桥式起重机控制系统中的优势和应用;最后,进行了PLC和变频器桥式起重机控制系统设计。
关键词:桥式起重机;PLC;变频器;控制系统;自动化一、引言桥式起重机是一种非常常见的起重设备,广泛应用于工厂、码头、港口等场所。
它具有运载能力强、工作灵活、结构稳定等特点。
目前,为了提高桥式起重机的操作效率和安全性,许多企业将自动化控制引入到桥式起重机中。
二、桥式起重机的工作原理和结构桥式起重机一般由桥架、行车和起重机构等组成。
工作时,起重机电机通过驱动机构提供动力。
起重机构由卷筒、悬挂系统和钩组成。
具体工作原理和结构可参考相关教材。
三、PLC和变频器在桥式起重机控制系统中的应用PLC和变频器作为现代自动化控制的重要组成部分,广泛应用于桥式起重机控制系统中。
PLC主要负责控制逻辑的实现,如控制起升、小车前后移动、大车左右移动等操作;变频器则用于控制电机的转速,实现对起重机各部分的精确控制和调速。
四、PLC和变频器桥式起重机控制系统设计1.系统硬件设计根据桥式起重机的实际需求和控制要求,选择合适的PLC和变频器设备,并搭建起相应的控制系统硬件平台。
2.系统软件设计利用PLC编程软件进行控制逻辑的设计和实现,包括起升、小车前后移动、大车左右移动等操作的代码编写。
同时,利用变频器的调试软件,设置合适的参数,实现电机的精确调速。
3.系统测试和调试将设计好的控制系统连接到实际的桥式起重机上,进行系统的测试和调试。
通过不断调整参数,检查系统运行状态,确保系统性能满足要求。
五、总结通过本文的研究,我们成功设计出了基于PLC和变频器的桥式起重机控制系统。
该控制系统具有自动化程度高、操作灵活、性能稳定等优点,可以提高桥式起重机的工作效率和安全性。
桥式起重机开题报告
桥式起重机开题报告桥式起重机开题报告一、引言桥式起重机是一种常见的起重设备,广泛应用于工业生产和建筑领域。
本文旨在对桥式起重机的原理、结构、工作原理以及应用进行探讨和分析,以期深入了解这一重要的机械设备。
二、桥式起重机的原理与结构桥式起重机是一种通过桥梁结构来支撑和移动起重机的设备。
它由主梁、端梁、大车、小车、起重机构和电气设备等组成。
主梁是桥式起重机的骨架,端梁用于支撑主梁。
大车和小车分别用于水平和垂直方向的移动,起重机构则负责起重和悬挂物体。
三、桥式起重机的工作原理桥式起重机的工作原理是通过电动机驱动大车和小车的移动,使起重机构能够在水平和垂直方向上进行运动。
起重机构通过绳索或链条将物体吊起并移动到目标位置。
电气设备控制起重机的运行和各个部分的协调工作。
四、桥式起重机的应用桥式起重机广泛应用于各个领域,包括工业生产、建筑工地、港口码头等。
在工业生产中,桥式起重机常用于装卸货物、搬运重物、组装大型设备等任务。
在建筑工地上,桥式起重机被用于运输建筑材料、搭建高层建筑等工作。
在港口码头,桥式起重机则承担着装卸集装箱、堆码等任务。
五、桥式起重机的发展趋势随着科技的进步和工业的发展,桥式起重机也在不断发展和改进。
目前,一些高端桥式起重机已经实现了自动化操作和远程控制。
此外,一些新型材料和结构设计也被应用于桥式起重机,以提高其性能和使用寿命。
六、结论桥式起重机作为一种重要的起重设备,在工业和建筑领域发挥着重要作用。
通过对其原理、结构、工作原理以及应用的分析,我们可以更好地理解和使用桥式起重机。
随着科技的进步,桥式起重机的发展前景将更加广阔,为各行各业的发展提供更大的便利和支持。
开题报告---桥式起重机的PLC控制系统的设计

毕业设计开题报告课题:桥式起重机的PLC控制系统的设计专业电气工程及其自动化课题名称:桥式起重机的PLC控制系统的设计课题类型:()应用型()研究型本课题的意义(本部分字数不小于600字)传统桥式起重机的控制系统主要采用交流绕线转子串电阻方法进行启动与调速,继电接触器控制。
这种控制系统的主要缺点有:①桥式起重机工作环境差,工作任务重,电动机以及所串电阻烧损和断裂故障时有发生;②接触器控制系统可靠性差,操作复杂,故障率高;③电阻调速,机械特性软,负载变化时转速也变化,调速不理想,串电阻长期发热,电能浪费大,效率低。
针对上述问题,本设计将利用可编程控制器对桥式起重机进行编程、调试,进而实现桥式起重机的半自动化。
解决了以往所使用的起重机容易造成电动机触头烧损、电刷冒火、电动机及转子所串电阻烧损和断裂等故障,并且降低了工人维修量和生产的维修费用,另外,PLC 控制系统的引入大大提高了起重机的操作精度和稳定度,综合保护功能完善,便于及时发现、查找、处理故障,并且节约了能源。
可编程控制器及其有关外围设备,易于与工业控制系统联成一个整体,易于扩充其功能的设计。
可编程控制器对用户来说,是一种无触点设备。
目前,可编程控制器的应用已成为工业自动化强有力的工具,得到了广泛的普及推广应用。
可编程控制器是面向用户的专用工业控制计算机,具有许多明显的优势:可靠性高,PLC不需要大量的活动元件和连线电子元件,它的连线打打减少,与此同时,系统的维修简单,维修时间短;易操作性,程序的输入直接可接显示,更改程序的操作也可以直接根据所需要的地址编号或接点号进行搜索或程序寻找,然后进行更改;灵活性,PLC采用的编程语言有梯形图、布尔助记符、功能表图、功能模块和语句描述编程语言,编程方法的多样性使编程简单、应用而拓展。
操作十分灵活方便,监视和控制变量十分容易。
总之,PLC在桥式起重机控制系统的应用大大提高了工作性能,减轻工人的劳动强度。
桥式起重机开题报告

吉林化工学院信息与控制工程学院
毕业设计开题报告
桥式起重机监控系统设计
Design of monitoring system for bridge crane
学生学号:08530111
学生姓名:张立伟
专业班级:电信0801
指导教师:杨潇邸书玉
职称:副教授讲师
起止日期:2012.2.27~2012.3.18
吉林化工学院
Jilin Institute of Chemical Technology
1. 本报告前6项内容由承担毕业论文(设计)课题任务的学生独立撰写;
2. 本报告必须在第八学期开学三周内交指导教师审阅并提出修改意见;
3. 学生须在小组内进行报告,并讨论;
4. 本报告作为指导教师、专业系或毕业论文(设计)指导小组审查学生能否承担该毕业设计(论文) 课题和是否按时完成进度的检查依据,并接受学校和教学院的抽查。
桥式起重机的PLC控
(1) PLC的构成 1) 中央处理器(CPU) 2)存储器 3)基本I/O接口电路 4)接口电路 5) 电源 PLC的特点 (1) 可靠性高 (2) 控制功能强 (3) 通用性好 (4) 操作方便 (5) 网络功能
PLC的工作原理
PLC的工作原理与计算机的工作原理基本一致。它采用循环扫描工作方式,
应用与发展
目前PLC已广泛应用于钢铁、石油化工、电力、交通运输、汽车、机械制造、环保与污水 处理、食品加工等领域。 我国使用较多的PLC产品有德国西门子的S7系列、日本立石公司的C系列、三菱公司的FX 系列、美国公司的GE系列等。 从可编程控制器的发展来看,有小型化和大型化两个趋势 。
PLC的组成
硬第 件四 设章 计 基 于 桥 式 起 重 机 PLC 控 制 系 统 的
软第 件五 设章 计基 于 桥 式 起 重 机 PLC 控 制 系 统 的
第1章 绪论
前言
桥式起重机是桥梁式起重机的一种,依靠升降机构和水平运动机构在两个互 相垂直的方向运动,能在矩阵场地上完成操作。随着电力电子技术、微电子技 术及现代控制理论的发展,控制从分立组成模拟量控制发展到数字量控制,运 用可编程控制器和变频器对电动机进行变频调速成为可行。 我国起重机的雏形是古代灌溉农田用的桔,现代我国起重机最早是通过学习 和仿造前苏联的技术制造出来的,目前各行业中使用的桥式起重机数不胜数, 普遍采用小型PLC控制和调压调速,基本上没有智能化产品。
甘肃机电职业技术学院 毕业设计
课题名称:桥式起重机的PLC控制系统设计
系
别: 电气工程系 专 业: 电气自动化技术 班 级: G103402 姓 名: 姚海军 指导教师: 汪存义 日 期: 2013年6月6日
桥式起重机设计开题报告doc
桥式起重机设计开题报告篇一:桥式起重机开题报告题目:开题报告 8吨起重机回转机构设计学院机电工程学院专业机电一体化专业学号 133260243 学生姓名刘增__指导教师张平格日期 XX年5月_毕业设计开题报告1. 课题名称8吨起重机回转机构设计2. 课题研究的目的与意义本设计主要对起重机的回转机构进行总体设计,以及电动机、联轴器、缓冲器、制动器的选用;运行机构减速器的设计计算和零件的校核计算及结构设计,使起重设备运行平稳, 定位准确, 安全可靠, 技术性能先进。
其主要目的是熟悉起重机的结构和工作原理,掌握起重机的设计方法,通过学习起重机的设计方法和步骤,提高学生分析问题和解决问题的能力,将自己所学的理论知识应用到实际工作生产中,培养实际动手能力。
同时让我们了解制造业的发展,为以后工作做准备。
3. 起重机在国内外的研究现状和发展趋势3.1 国内大型起重机的发展现状目前,国内专业生产大型起重机的厂家很多。
其中以中联重科、三一重工、抚挖等公司产品系列较全市场占有率较高。
中联重科在XX年12月宣布实行品牌统一战略后现已成功开发了50t~600t履带式起重机产品系列。
作为中国起重机行业的领跑者,徐州重型机械有限公司现在已经形成了以汽车起重机为主导,履带式重机和全路面起重机为侧翼强势推进的庞大型谱群。
国内最具历史的履带式起重机生产企业抚挖现已拥有35t~350t的履带式起重机产品系列。
QUY350是抚挖XX年推出的国产首台350t履带式起重机,填补了国内350t履带式起【1】重机的产品型谱空白。
三一科技自XX年初进入履带式起重机的研发和生产领域至今,已成功开发出50t~900t共10个型号的全系列产品并全部实现销售。
其900t履带起重机的顺利下线,标志着我国大型、超大型履带起重机自主研发领域已走在亚洲前列,成为目前亚洲最大吨位的履带式起重机。
据悉,日前三一科技已具备3200t以下履带式起重机的开发能力【2】3.2 国外大型起重机的发展现状目前,国外专业生产大型起重机厂家很多。
毕业设计plc控制桥式起重机

毕业设计plc控制桥式起重机PLC(可编程逻辑控制器)技术在工业自动化领域发挥着重要的作用,它具备可编程、易扩展、高可靠性等特点,被广泛应用于各种控制系统中。
在毕业设计中,我们选择了PLC控制桥式起重机作为研究对象,旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
本文将对这一毕业设计的内容进行详细阐述,以供读者参考。
首先,我们将介绍桥式起重机的基本原理和结构。
桥式起重机是一种常用的起重设备,其具备在两端设置的大臂可自由移动的特点,可用于各种工业场所的货物搬运。
桥式起重机的主要组成部分包括:大臂、小臂、平台、滑轮组、电动机和控制系统等。
在起重过程中,控制系统起着至关重要的作用,它能够控制各个电动机的启停、速度调节以及起重机的方向等。
PLC控制桥式起重机的优势显而易见。
首先,PLC具备可编程的特点,可以根据实际需求编写程序,实现自动化控制。
其次,PLC系统易于扩展和维护,结构简单,可根据需求增加输入输出模块,提高系统的功能性。
另外,PLC还具有高可靠性和抗干扰能力,能够适应工业环境的特殊要求,确保起重机的操作安全。
在进行PLC控制桥式起重机的设计时,我们首先需要分析起重机系统的功能需求。
起重机的基本控制功能包括:起升、行走、旋转和变幅等。
我们需要编写PLC程序,实现对起重机各个部分电动机的控制,包括启停、正反转、速度调节等。
此外,我们还需考虑安全性因素,编写紧急停止、防撞、超载保护等程序,确保起重机操作的安全可靠。
在具体实施中,我们可以采用西门子、施耐德等知名PLC品牌的设备,结合相应的编程软件进行编写程序。
在编写程序时,需要考虑到桥式起重机的具体参数,如起升高度、最大载重量、行走速度等,并根据实际需求进行调整。
在程序编写完成后,需要进行严密的测试和调试,确保PLC控制桥式起重机能够完全满足设计要求。
总结起来,通过本次毕业设计,我们旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
桥式起重机自动运行控制系统设计的开题报告
桥式起重机自动运行控制系统设计的开题报告一、选题背景及意义桥式起重机广泛应用于各种工业领域,如港口、物流、钢铁、化工等行业。
随着工业自动化的发展,桥式起重机的自动运行控制系统越来越受到重视。
自动运行控制系统可以提高生产效率、降低人工操作难度和劳动强度、减少事故风险等。
二、研究目标与内容本次研究旨在设计和开发桥式起重机自动运行控制系统,探索实现自动化控制的最佳方案,包括但不限于以下内容:1. 系统硬件部分:采集桥式起重机实时运行状态,包括重量、速度、方向等,以及控制起重机运动的电气设备、传感器、马达等。
2. 系统软件部分:编写控制程序,将采集的数据进行处理和分析,实现控制命令的下发和指挥系统。
3. 系统通信部分:进行数据传输和通信,确保系统间信息交互的稳定和顺畅,包括上位机与控制器之间的通信、传感器与控制器之间的通信等。
三、预期成果该桥式起重机自动运行控制系统的开发和应用可望带来以下成果:1. 实现桥式起重机的自动化控制,提高操作效率、降低人力成本和安全隐患。
2. 实现起重机的远程监控和控制,使得起重机的操作更加便利和安全。
3. 提供可靠的数据支持和操作界面,为企业管理提供决策依据。
四、研究方法本研究将采用系统化的方法和流程,包括需求分析、方案设计、系统实现和测试验证等步骤。
具体方法如下:1. 需求分析:对起重机的运行控制需求进行分析,确定系统功能和性能指标;分析相关技术,选定合适的技术方案和设备。
2. 方案设计:根据需求分析,设计出完整的系统架构,建立数据模型和控制模型,编写软件框架,默认控制策略等。
3. 系统实现:根据方案设计,搭建硬件平台;编写控制程序,实现采集、处理和控制等功能。
4. 测试验证:对系统进行全面测试和评估,确保系统性能和功能符合设计要求;进行系统调试,保证系统的稳定性、可靠性和安全性。
五、研究难点及解决方案1. 大量的实时数据采集和处理,需要良好的通信和数据处理能力。
解决方案:采用高速数据传输和数据存储技术,保证数据的实时传输和安全可靠的存储。
关于PLC和变频器的桥式起重机控制系统设计资料

摘要隨著現代控制理論的應用,微處理器和微電子技術的發展,使變頻調速控制系統日趨成熟。
而橋式起重機作為物料搬運系統中一種典型設備,在企業生產活動中應用廣泛作用顯著,故對於提高其運行效率,確保運行安全,降低物料搬運成本是十分重要。
傳統的橋式起重控制系統主要採用繼電器接觸器進行控制,採用交流繞線串電阻的方法進行啟動和調速,這種控制系統存在可靠性差,故障率高,電能浪費大,效率低等缺點。
因此根據橋式起重機的運行特點,將可編程序控制器與變頻器結合應用於橋式起重機控制系統,其中PLC系統則採用SIEMENS公司產品,大大提高了操作精度和穩定度;綜合保護功能完善,便於及時發現、查找、處理故障;並且節約了能源。
關鍵字:可編程序控制器;橋式起重機;變頻調速;變頻器基於PLC和變頻器的橋式起重機控制系統設計目錄摘要 (I)第一章绪论 (1)1.1桥式起重机简介 (1)1.2 本课题设计的意义、主要内容及基本参数 (1)第二章矢量控制变频调速 (4)2.1 变频调速的基本原理 (4)2.2变频器的基本结构和功能 (6)2.2.1变频器的主电路 (6)2.2.2变频器的控制电路构成 (7)2.3变频调速的控制方式—矢量控制方式 (7)2.3.1矢量控制的基本思想 (7)2.3.2矢量变换规律 (8)2.3.3矢量变换下异步电动机的数学模型 (11)2.4矢量变换控制方程 (12)第三章桥式起重机变频控制系统的硬件设计 (13)3.1总体设计方法 (13)3.2 PLC技术简介 (15)3.2.1 PLC概述 (15)3.2.2 Siemens S7-200结构及工作原理 (15)3.3部件的选择 (16)3.3.1电机的选用 (16)3.3.2变频器的选用 (18)3.3.3 PLC的选用 (21)3.3.4常用辅件的选择 (22)3.4起重机变频调速系统设计 (23)3.4.1系统控制的要求 (23)3.4.2控制系统的1/O点及地址分配 (24)第四章桥式起重机变频调速系统软件设计 (28)4.1 S7-200PLC网络的通信协议 (28)4.1.1 S7-200PLC网络的通信协议的种类 (28)4.1.2本系统通信协议的选择 (28)4.2 PLC程序设计 (30)4.2.1 PLC编程软件概述 (30)4.2.2程序设计 (30)4.3系统抗干扰措施 (37)第五章结束语 (38)致谢 (39)参考文献 (40)1234學院畢業設計(論文)第一章緒論1.1橋式起重機簡介橋式起重機在冶金企業及其它行業有著廣泛的應用,其作用主要用來實現物體的升降和轉運,橋式起重機工作環境惡劣,工作任務重。
plc系统设计开题报告
plc系统设计开题报告PLC系统设计开题报告一、引言PLC(可编程逻辑控制器)是一种用于自动化控制的专用计算机,广泛应用于工业控制领域。
本开题报告旨在介绍PLC系统设计的背景和目标,并提出相关的研究问题和方法。
二、背景随着工业自动化的不断发展,PLC系统在工业生产中发挥着重要的作用。
传统的PLC系统设计主要依靠经验和手动编程,存在编程复杂、维护困难等问题。
因此,如何提高PLC系统设计的效率和可靠性成为了一个重要的研究方向。
三、目标本研究的目标是设计一种智能化的PLC系统,以提高系统设计的效率和可靠性。
具体而言,我们希望实现以下目标:1. 开发一种自动化的PLC系统设计工具,能够根据用户需求自动生成PLC程序;2. 提出一种优化算法,以提高PLC系统的性能和响应速度;3. 设计一种可扩展的PLC系统架构,以适应不同规模和复杂度的工业控制任务。
四、研究问题在实现上述目标的过程中,我们将面临以下研究问题:1. 如何建立PLC系统设计的自动化模型,以实现程序自动生成?2. 如何设计一种高效的优化算法,以提高PLC系统的性能和响应速度?3. 如何设计一种可扩展的PLC系统架构,以适应不同规模和复杂度的工业控制任务?五、研究方法为了解决上述研究问题,我们将采用以下方法:1. 分析现有的PLC系统设计方法和工具,总结其优缺点;2. 建立PLC系统设计的自动化模型,包括需求分析、程序生成和验证等环节;3. 提出一种基于遗传算法的优化方法,以提高PLC系统的性能和响应速度;4. 设计一种可扩展的PLC系统架构,包括硬件和软件的设计。
六、预期结果通过本研究,我们预期能够实现以下结果:1. 开发一种自动化的PLC系统设计工具,能够根据用户需求自动生成PLC程序;2. 提出一种基于遗传算法的优化方法,以提高PLC系统的性能和响应速度;3. 设计一种可扩展的PLC系统架构,以适应不同规模和复杂度的工业控制任务。
七、研究计划本研究计划分为以下几个阶段:1. 阶段一:调研和需求分析,分析现有的PLC系统设计方法和工具,并确定用户需求;2. 阶段二:模型建立和程序生成,建立PLC系统设计的自动化模型,并实现程序自动生成;3. 阶段三:优化算法设计,提出一种基于遗传算法的优化方法,并优化PLC系统的性能和响应速度;4. 阶段四:系统架构设计,设计一种可扩展的PLC系统架构,包括硬件和软件的设计;5. 阶段五:实验和验证,通过实验验证所提出方法和设计的有效性和可行性;6. 阶段六:撰写论文和总结,撰写研究论文并总结研究成果。
桥式起重机的PLC控制系统设计
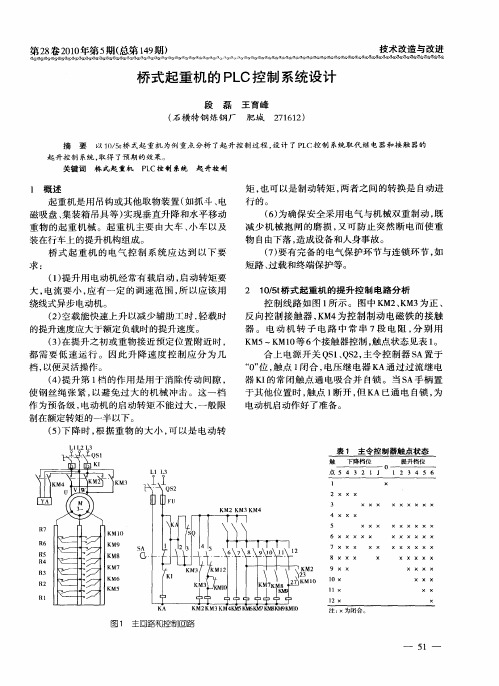
() 升用 电动 机经 常 有 载 启动 , 动 转 矩 要 1提 启 大, 电流 要 小 , 有 一 定 的 调 速 范 围 , 以 应该 用 应 所 绕线式 异 步 电动机 。 () 2 空载 能 快 速上 升 以减 少辅 助 工 时 , 载 时 轻
档 。为 了避免 经过 “ 4 、 下 3 档 时速度 过 高 , 下 ”“ ” 在 “ 5 档 K 0 圈 通 电吸合 时 , 下 ” M1 线 串人 它 的常 开触
・
提升限位保护作用。 触 点 5闭合 , 升 接 触 器 K 通 电 吸合 并 自 提 M3 锁, 电动机 M定 子 绕组 加 正 向相 序 电压 ; M3 助 K 辅 触 点 闭 合 , 切 除 各 级 电 阻 的 接 触 器 和制 动 电磁 为 铁的接触器接通电源作准备。 触 点 6闭合 , 动 接 触 器 K 通 电 吸合 并 自 制 M4 锁 。制 动 电 磁 铁 Y A通 电 , 开 电磁 抱 闸 , 升 电 松 提 动机 M可 自由旋 转 。 触点 7 闭合 , 接触器 K 5 电吸合 , M通 其常开触 点 闭合 , 子切 除 1 电阻 ( ) 转 级 R1。 可 见这 时 电动 机转 子 切除 了 l 电阻 , 级 电磁抱 闸松 开 , 电动 机 M定 子 加 正 向相 序 电压低 速 启 动 , 当电磁转 矩等 于 阻力矩 时 , 速稳 定运转 。 M低 ( ) 令 控 制器 S 2主 A手 柄 置 于 提升 “” 时 , 2档 较 “” 增 加 了触 点 8 合 , 触 器 K 通 电 , 主 1档 闭 接 M6 其 触 点 闭合 , 又切 除 1 转 子 电 阻 ( 2 , 级 R ) 电动 机 的转
基于PLC与变频器的桥式起重机控制系统设计
Abstract
Bridge crane is a typical handling materials, widely used to production, thus it is very vital to improve the efficiency of bridge cranes and ensure the safetyand reliability of the operation and reduce the cost of handling material.Aiming at bridge crane used to convey, it is studied.Due towork environmentof thecrane complex,Homework loadlyand frequent,mechanical vibration shock serious, and the traditional bridge crane control system is mainlycontrolledby electric relay, using the method of communication winding resistance to start and speed. But the shortcomings in it are poor reliability, complex operation, high failure, wasteful energy and low efficiency. Thus resrarch aiming at bridge crane control system has a verysignificance.Aiming atsolving the problems of above-mentioned, PLC and frequency converter are applied to bridge crane, realizingcrane motor speed regulation,meetingto save energy and to adapt to the needs of production,having reduced energy, mechanical properties, etc.
基于PLC模糊控制的桥式起重机变频调速系统的研究的开题报告
基于PLC模糊控制的桥式起重机变频调速系统的研究的开题报告1.研究背景桥式起重机是一种广泛应用于工矿企业的大型起重设备,其主要功能是在工业生产中进行重物货物的搬运和装卸。
传统桥式起重机采用交流调速式变速器进行速度控制,但该系统存在速度响应快、动态性能差、控制精度低等问题,使得机器的性能指标无法满足现代工业中的要求。
因此,本研究旨在通过采用PLC模糊控制技术,对桥式起重机的调速系统进行优化,提高其动态性能和控制精度,从而提高其工作效率和经济效益。
2.研究内容(1)对PLC程序设计进行研究,掌握各种PLC编程语言的基本知识,研究PLC控制系统的组成和工作原理;(2)对变频调速系统进行研究,了解其工作原理和控制策略,设计桥式起重机变频调速系统的控制算法;(3)建立数学模型,设计变频器控制回路,实现控制算法在PLC中的编程;(4)通过仿真软件进行仿真实验,分析桥式起重机变频调速系统的动态性能和控制精度,并分析控制算法的优缺点;(5)通过实际测试验证仿真结果,改进控制算法,实现桥式起重机变频调速系统的性能优化。
3.研究意义本研究可推动工业自动化领域的发展,提高桥式起重机的控制精度和工作效率,减少安全事故的发生。
同时,采用PLC模糊控制技术可以提高控制算法的可靠性和适应性,使得机器运行状态能够更好地适应复杂的工业环境,具有广泛的应用前景和市场价值。
4.研究方法本研究采用理论研究与实验验证相结合的方法,首先进行文献资料收集和PLC模糊控制技术的学习,确定桥式起重机变频调速控制算法的设计方案;然后通过建立数学模型,对控制算法进行仿真实验,分析控制算法在动态性能、控制精度等方面的表现;最后进行实际测试验证仿真结果,优化控制算法并评估其性能。
5.预期结果本研究预期能够设计出一种基于PLC模糊控制的桥式起重机变频调速系统,实现升降和移动机构的精确控制,优化系统动态性能和控制精度,提高机器工作效率和安全性。
同时,本研究可以为PLC模糊控制在工业自动化领域的应用提供一定的技术支持和经验参考。
plc的控制系统设计开题报告

plc的控制系统设计开题报告PLC的控制系统设计开题报告一、引言近年来,随着工业自动化的不断发展,PLC(可编程逻辑控制器)作为一种重要的控制设备,被广泛应用于各个工业领域。
PLC的控制系统设计是实现自动化生产过程中不可或缺的一环。
本文旨在探讨PLC的控制系统设计,并提出一种新的设计方法,以提高生产效率和质量。
二、PLC的基本原理PLC是一种基于微处理器的控制设备,其基本原理是通过输入输出模块与外部设备进行数据交互,实现对生产过程中各种设备的控制。
PLC的核心是其程序,通过编写程序来实现对设备的控制逻辑。
PLC具有高可靠性、灵活性和易于维护等优点,因此被广泛应用于各个行业。
三、PLC的控制系统设计方法1. 系统需求分析在进行PLC的控制系统设计之前,首先需要进行系统需求分析。
通过与生产过程的相关人员进行沟通,了解生产过程中的各个环节和要求,明确所需的控制功能和性能指标。
在需求分析的基础上,确定控制系统的整体结构和功能模块。
2. 硬件选型与布局根据系统需求和功能模块的确定,进行PLC硬件的选型和布局。
选择适合的PLC型号和数量,并合理安排其在生产现场的布局,以确保信号传输的稳定性和可靠性。
同时,还需要选择适合的输入输出模块、传感器和执行器等外部设备,以满足控制系统的需求。
3. 程序设计与调试在硬件选型和布局完成后,进行PLC程序的设计与调试。
根据控制系统的功能模块,编写相应的程序逻辑,并进行逐步调试和优化。
在调试过程中,需要考虑各个设备之间的协调工作,确保控制系统的稳定性和可靠性。
4. 系统测试与验收完成程序设计和调试后,进行系统测试与验收。
通过对控制系统进行全面的功能测试和性能测试,验证其是否满足需求。
同时,与生产过程的相关人员进行沟通,了解他们对控制系统的意见和建议,以进一步完善系统设计。
四、新的设计方法基于以上的控制系统设计方法,本文提出一种新的设计方法,即基于模块化和可扩展性的设计。
传统的控制系统设计往往是针对特定的生产过程进行设计,导致系统的可维护性和可扩展性较差。
20t桥式起重机开题报告

题目:1.结合课题任务情况,查阅文献资料,文献综述2.市场和科研选题由来:21世纪的到来中国也进入了高速发展阶段。
工业也得到了飞速的发展。
于是各种机械设备也孕育而生。
起重机就是这么而来的。
随着工业,农业,建筑和交通运输的发展,各行各业对起重机的需求也越来越多,因此起重机不断朝着大型化,自动化,网络化和智能化方向发展。
目前,国内起重机发生故障较多、监管工作不足,为了保证起重机在安全限度内工作和操作人员的安全驾驶,研究起重机的监控系统意义重大桥式起重机作为物料搬运机械在整个国民经济中有着十分重要的地位。
经过几十年的发展,我国桥式起重机制造厂和使用部门在设计、制造工艺,设备使用维修、管理方面,不断积累经验,不断改造,推动了桥式起重机的技术进步。
但在实际使用中,结构开裂仍时有发生。
究其原因是频繁的超负荷作业及过大的机械振动冲击所引起的机械疲劳。
因此,除了机械上改进设计外,改善交流电气传动,减少起制动冲击,也是一个很重要的方面。
由于传统桥式起重机的电控系统采用转子回路串接电阻进行有级调速,致使机械冲击频繁,振动剧烈,因此,电气控制上采用平滑的无级调速是解决问题的有效手段。
起重机的发源地还是在欧洲,尤其是德国。
目前,除德国之外,一些北欧的公司的业务规模也非常好。
德国的DEMAG 老牌的起重机制造企业,曾经隶属于全球伍佰强的企业集团,最近几年,先后经历多次分拆重组和收购,使得发展受到影响,但是在业界中仍然被认为是顶级的企业芬兰的Konecranes该企业起源于芬兰的老牌企业集团kone公司,最初公司的规模和品牌等在欧洲都不是很显著,但是该公司采取积极的财务和发展战略,目前公司的销售额应该是最大的。
美国的CM集团。
没有CM在最近的数年中,先后发起数十次收购,目前是北美最大的工厂起重机械制造商。
由于桥式起重机的门槛比较低,中国目前有超过1000家注册的起重机公司,尤其是在河南新乡在最近几年发展的比较快,号称中国的起重机之乡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)
开题报告
题目: 桥式起重机的PLC控制系统设计
院系名称:电气工程学院专业班级:
学生姓名:学号:
指导教师:教师职称:高级工程师
2013年03 月15日
开题报告填写要求
1.开题报告(含“文献综述”)作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。
此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及所在专业审查后生效。
2.开题报告内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见。
3.“文献综述”应按论文的格式成文,并直接书写(或打印)在本开题报告第一栏目内,学生写文献综述的参考文献应不少于15篇(不包括辞典、手册)。
4.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2006年11月20日”或“2006-11-30”。
毕业设计(论文)开题报告
1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000~4000字左右的文献综述:
文献综述
1.1桥式起重机概述
法兰泰克桥式起重机(Bridge Crane)是横架于车间、仓库和料场上空进行物料吊运的起重机械。
由于它两端坐落在高大的水泥柱上或金属支架上,形状似桥,所以俗称“天车”和“行车”。
它是使用范围最广、数量最多的一种起重机械。
桥式起重机是现代工业生产和起重运输中实现生产过程机械化、自动化的重要工具和设备。
所以桥式起重机在室内外工矿企业、钢铁化工、铁路交通、港口码头以及物流周转等部门和场所均得到广泛的运用。
它对减轻工人劳动强度、提高劳动生产率、促进生产过程机械化起着重要作用,是现代化生产中不可缺少的工具。
起重机包括桥式、门式、梁氏和旋转式等多种,其中以桥式起重机的应用最广。
桥式类起重机又分为通用桥式起重机、冶金专用起重机、龙门起重机与缆索起重机等。
法兰泰克单梁桥式起重机,双梁桥式起重机是新一代的革新产品,性能优越,结构紧凑,净空间尺寸小,能充分利用厂房的有效空间。
充分考虑了客户的需求,使客户在使用过程中增加了安全性和舒适性。
标准配置为小车变频和大车变频,使行车运行平稳、可靠,可根据客户现场工况的需要配置起升变频或双葫芦运行。
1.2 PLC概述
PLC是一种专门在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
PLC及其有关的外围设备都应按照易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。
可编程程序控制器(Programmable Controler),PLC(pragrammable Lagic cantroler),即是可编程逻辑控制器。
其采用计算机结构,主要包括CPU,存储器、输入、输出接口及模块、通讯接口及模块、编程器和电源六个部分。
如图1所示,PLC
2.本课题要研究或解决的问题和拟采用的研究手段(途径):
2.1 研究任务
1.根据I/0信号进行选择,包括输入输出信号的数量、性质、参数和特性要求等选定合适的PLC。
2.如何能够使桥式起重机进行安全控制,例如:怎样设置电铃或警报装置、怎样设置各种限位开关、怎样设置紧急开关等,安全不可忽视,需要设计者仔细研究。
2.2 解决途径
1.根据I/0信号进行选择,包括输入输出信号的数量、性质、参数和特性要求等了解不同的PLC的特性,对欧姆龙PLC、西门子PLC、三菱FX 系列PLC等PLC进行了解,决定使用正确的PLC。
2.进行安全操作应通过控制手柄或控制台给PLC输入信号,来完成桥式起重机各部分的动作,上文提到的几个问题通过思考发现需要在设计时做到以下几点:
(1)设置电铃或报警装置,在出现故障时,可进行报警。
在起重机动作之前应该报警,电铃未响之前,起重机无动作;
(2)设置各种限位开关,包括主起升限位、副起升限位、小车前进限位、小车后退限位、大车左行限位、大车右行限位等开关在到位时切
(3)设置紧急断电开关,在必要时迅速切断总电源。
紧急断电开关的结构形式,应该是不能自动复位的。
指导教师意见:
1.对“文献综述”的评语:
2.对本课题的深度、广度及工作量的意见和对设计(论文)结果的预测:
指导教师:
年月日系(教研室)审核意见:
负责人:
年月日。