matlab控制系统仿真要点
应用MATLAB控制系统仿真

01
根据系统性能要求,设计比例、积分、微分控制器参数,优化
系统性能。
状态反馈控制器设计
02
通过状态反馈控制器设计,实现系统的最优控制。
鲁棒控制器设计
03
针对不确定性系统,设计鲁棒控制器,提高系统对参数变化的
适应性。
04
控制系统仿真的动态行为,通过建立和求解微 分方程来模拟系统的动态响应。
性能等。
05
Matlab控制系统仿真实 例
一阶系统仿真
总结词:简单模拟
详细描述:一阶系统是最简 单的控制系统,其动态行为 可以用一个一阶微分方程描 述。在Matlab中,可以使用 `tf`函数创建一个一阶传递函 数模型,然后使用`step`函 数进行仿真。
总结词:性能分析
详细描述:通过仿真,可以 观察一阶系统的响应曲线, 包括超调和调节时间等性能 指标。使用Matlab的绘图功 能,可以直观地展示系统的 动态行为。
THANKS FOR WATCHING
感谢您的观看
适用于模拟数字控制系统、采样控制系统等。
实时仿真
01
在实际硬件上实时模拟控制系统的动态行为,通过将
控制算法嵌入到实际控制系统中进行实时仿真。
02
使用Matlab中的`real-time workshop`等工具箱进
行建模和仿真,可以方便地实现实时仿真。
03
适用于模拟实际控制系统、验证控制算法的正确性和
实时仿真
Matlab支持实时仿真,可以在实 际硬件上运行控制算法,进行系 统测试。
02
控制系统数学模型
线性时不变系统
线性时不变系统(LTI)是指系统的输出与输入之间的关系 可以用线性常数来描述的系统。在控制系统中,LTI系统是 最常见的系统类型之一。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
Matlab控制系统仿真基础
Matlab控制系统仿真基础目录1.显示完整多项式2.多项式乘、除、求导、求值、求根3.表达式通分4.拉普拉斯变换5.生成传递函数6.零极点增益模型7.传递函数和零极点增益模型转换8.系统的动态性能指标9.Sigmoid函数10.pzmap绘制传递函数的零极点分布图1. 显示完整多项式>> p = [1 2 3]p =1 2 3>> f = poly2sym(p)f =x^2 + 2*x + 32. 多项式乘、除、求导、求值、求根>> p1 = [1 5 7];>> p2 = [1 3];>> p = conv(p1, p2)p =1 8 22 21>> f = poly2sym(p)f =x^3 + 8*x^2 + 22*x + 21>> [q, r] =deconv(p1, p2)q =1 2r =0 0 1>> dp = polyder(p)dp =3 16 22>> fx = polyval(p, 1)fx =52>> p = [1 -5 6]; f = poly2sym(p)f =x^2 - 5*x + 6>> x = roots(p)x =3.00002.00003. 表达式通分>> syms x>> y = 1/(x-1) + 2/(x-2);>> [num, den] = numden(y)num =3*x - 4den =(x - 1)*(x - 2)4. 拉普拉斯变换>> syms x s>> y = sin(2*x); Fy = laplace(y)Fy =2/(s^2 + 4)>> y1 = x^2; Fy1 = laplace(y1)Fy1 =2/s^3>> Fs = 1/s^2; f = ilaplace(Fs)f =t5. 生成传递函数>> num = [1 1];>> den = [1 0 2 3];>> sys = tf(num, den)sys =s + 1-------------s^3 + 2 s + 3Continuous-time transfer function.6. 零极点增益模型>> z = [-1]; p = [-2 -5]; k = 10;>> sys = zpk(z, p, k)sys =10 (s+1)-----------(s+2) (s+5)Continuous-time zero/pole/gain model.7. 传递函数和零极点增益模型转换>> num = [1 1]; den = [1 5 6];>> sys = tf(num, den)sys =s + 1-------------s^2 + 5 s + 6Continuous-time transfer function.>> [z, p, k] = tf2zp(num, den) %传递函数转换为零极点增益模型z =-1p =-3.0000-2.0000k =1>> [n, d] = zp2tf(z, p, k) %零极点增益模型转换为传递函数n =0 1 1d =1 5 68. 系统的动态性能指标传递函数为 G(s)=1/(s^2+s+1) 的系统的动态性能指标,包括峰值响应、调节时间、稳态值等G = tf(1, [1 1 1]);step(G);% 在阶跃响应曲线图中,右键,选择charateristics,调出响应动态性能指标阶跃响应9. Sigmoid函数Sigmoid函数的数学公式为 f(x) = 1/(1 + exp(-x)); 它是常微分方程 dy/dx = y(1-y) 的一个解f = '1/(1 + exp(-x))';fplot(f, [-10 10]);title('Sigmoid 函数, f = 1/(1 + exp(-x))');Sigmoid函数10. pzmap绘制传递函数的零极点分布图>> sys = tf([1 2 1], [1 5 6]) %传递函数模型sys =s^2 + 2 s + 1-------------s^2 + 5 s + 6Continuous-time transfer function.>> pzmap(sys);零极点图。
matlab 控制系统仿真
摘要MATLAB语言是一种十分有效的工具,能容易地解决在系统仿真及控制系统计算机辅助设计领域的教学与研究中遇到的问题,它可以将使用者从繁琐的底层编程中解放出来,把有限的宝贵时间更多地花在解决科学问题上。
MATLAB GUI 是MATLAB的人机交互界面。
由于GUI本身提供了windows基本控件的支持,并且具有良好的事件驱动机制,同时提供了MATLAB数学库的接口,所以GUI 对于控制系统仿真的平台设计显得十分合适。
GUI对于每个用户窗口生成.fig和.m 文件。
前者负责界面的设计信息,后者负责后台代码的设计。
本文所做的研究主要是基于MATLAB GUI平台,结合控制系统基础理论和MATLAB控制系统工具箱,实现了用于控制系统计算机辅助分析与设计的软件。
本软件主要功能:实现传递函数模型输入、状态方程模型输入、模型装换、控制系统稳定性分析、系统可观性可控性判断,绘制系统奈奎斯特图、波特图、根轨迹图以及零极点分布图。
在继续完善的基础上能够用于本科自动控制原理教程的教学实验和一般的科学研究。
关键词:控制系统;MATLAB GUI;计算机辅助设计AbstractMATLAB language is a very effective tool,and can be easily resolved in the system simulation and control system of teaching in the field of computer-aided design and research problems,it could be the bottom of the user from tedious programming liberate the limited spend more valuable time to solve scientific problems.The MATLAB GUI is the interactive interface.As the GUI itself provides the basic control windows support,and has a good mechanism for event-driven,while providing the MATLAB Math Library interface,the GUI for control system simulation platform for the design of it is suitable. GUI window generated for each user. Fig and.M file. The former is responsible for the design of the interface information,which is responsible for the design of the background code.Research done in this article is mainly based on MATLAB GUI platform,the basis of combination of control system theory and MATLAB Control System Toolbox,the realization of control systems for computer-aided analysis and design software. The main functions of the software: the realization of transfer function model input,the state equation model input,the model fitted for the control system stability analysis,system observability controllability judgments、rendering the system Nyquist diagram、Bode plots、root locus and Pole-zero distribution. While continuing to improve based on the principle of automatic control can be used for undergraduate teaching course experiments and scientific research in general.Key words:Control System;MATLAB GUI; Computer-assistant design目录第1章概述 (1)1.1 论文选题背景和意义 (1)1.2 计算机辅助分析与设计在控制系统仿真中的发展现状 (1)1.3 本文主要内容 (3)第2章控制系统与MATLAB语言 (4)2.1 控制系统理论基础 (4)2.2 MATLAB语言与控制系统工具箱 (5)第3章 MATLAB GUI简介及应用 (9)3.1 MATLAB GUI (9)3.2 软件设计步骤 (10)第4章仿真系统测试与演示 (16)4.1 控制系统的模型输入 (16)4.2 控制系统的稳定性分析 (19)4.3 控制系统可控可观性分析 (20)4.4 控制系统频率响应 (23)4.5 控制系统时域响应 (27)4.6 控制系统根轨迹绘制 (28)结论 (31)参考文献 (32)致谢 (33)第1章概述1.1 论文选题背景和意义自动控制原理是自动控制专业和自动化专业的主要课程之一,是研究自动控制技术的基础理论课,是必修的专业基础课程。
Matlab中的模拟与仿真技术详解
Matlab中的模拟与仿真技术详解引言Matlab是一种被广泛应用于科学研究和工程领域的高级计算环境和编程语言。
它提供了丰富的函数库和工具箱,使得模拟和仿真技术得以在各种科学和工程应用中发挥出色的作用。
本文将详细介绍Matlab中的模拟与仿真技术,并深入探讨其在不同领域的应用。
一、Matlab中的模拟技术1.1 数学模型的建立在Matlab中进行模拟,首先需要建立相应的数学模型,以描述系统的行为。
数学模型可以是一组方程、差分方程、微分方程等,用于描述系统的输入、输出和中间变量之间的关系。
Matlab提供了强大的数学工具,如符号计算工具箱,可以帮助用户更方便地建立和求解各种数学模型。
1.2 信号与系统模拟信号与系统模拟是Matlab中常见的一种模拟技术。
通过模拟信号的输入、处理和输出过程,可以对系统进行分析和验证。
在Matlab中,可以使用信号处理工具箱中的函数来生成、操作和分析各种类型的信号。
例如,可以生成正弦波、方波、脉冲信号等,并对它们进行滤波、频谱分析、时频分析等操作。
1.3 电路模拟电路模拟是Matlab中另一个常用的模拟技术。
通过建立电路模型,可以对电路的行为进行仿真和分析。
Matlab提供了电路仿真工具箱,用户可以通过搭建电路拓扑结构和设置元器件参数,实现对电路的模拟和分析。
这种电路模拟技术在电子电路设计、性能评估和故障诊断等领域有广泛的应用。
1.4 机械系统模拟除了信号与系统和电路模拟外,Matlab还可以进行机械系统的模拟。
通过建立机械系统的动力学模型,可以预测物体的运动规律、受力情况等。
Matlab提供了机械系统建模和仿真工具箱,用户可以建立刚体系统、弹簧阻尼系统等,并进行仿真和动态分析。
这种机械系统模拟技术在机械工程、工业设计等领域具有重要的应用价值。
二、Matlab中的仿真技术2.1 数值仿真数值仿真是Matlab中最常见的仿真技术之一。
它通过数值计算方法对系统进行仿真,并得到系统的数值解。
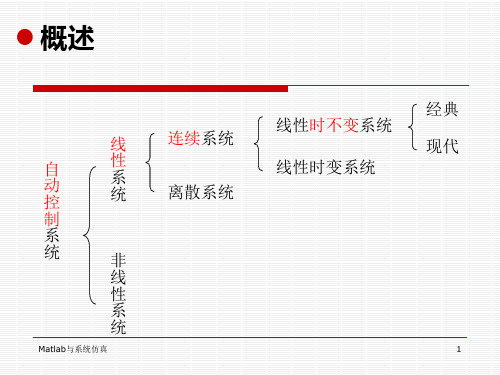
MATLAB与控制系统仿真
第31页/共52页
传递函数描述
连续系统的传递函数模型
连续系统的传递函数如下:
G(s)
C(s) R(s)
b1s m a1s n
b2 s m1 a2 s n1
... bns ... ans
bm1 an1
(2)“%” 后面所有文字为注释. (3) “...”表示续行.
+ 加法运算,适用于两个数或两个同阶矩阵相加. — 减法运算 * 乘法运算 .* 点乘运算 / 除法运算 ./ 点除运算 ^ 乘幂运算 .^ 点乘幂运算 \ 反斜杠表示左除.
第3页/共52页
3、数学函数
函数 sin(x) cos(x) tan(x) abs(x) min(x) sqrt(x) log(x) sign(x)
end 步长的缺省值是1。步长可以在正实数或负实数范围内任意指定,对 于正数,循环变量的值大于终止值时,循环结束;对于负数,循环变量的 值小于终止值时,循环结束。
第8页/共52页
程序控制语句
while循环的基本格式为: while 表达式 循环体 end
若表达式为真,则执行循环体的内容,执行后再判断表达式是否为真,若 为假则跳出循环体,向下继续执行,否则继续执行循环体。 • break:从循环体中跳出,并使循环结束
• Gzpk=zpk(Gtf) • [zz,pp,kk]=zp kdata(Gzpk ,’v’) • %获得G(s)的零点、极点和增益
• ZPK形式变换为TF形式
• Svv=tf(Sxx) • [nn,dd]=tfdata(Svv,’v’) • %获得分子分母多项式系数
第17页/共52页
Matlab技术控制系统设计与仿真
Matlab技术控制系统设计与仿真一、引言在现代科技领域中,控制系统是一个至关重要的概念。
在各种领域,如机械工程、电子工程、化工工程等,控制系统的设计和仿真是实现目标的关键。
而Matlab作为一种功能强大的数值计算软件,被广泛应用于控制系统设计和仿真。
本文将探讨Matlab技术在控制系统设计和仿真中的应用。
二、Matlab基础知识在开始探讨Matlab技术在控制系统设计和仿真中的应用之前,有必要先了解一些Matlab的基础知识。
Matlab是由MathWorks公司开发的一款用于数值计算和科学绘图的软件。
它提供了丰富的函数库和工具箱,能够满足各种数学和工程领域的需求。
Matlab的核心功能包括数值计算、数据分析、图形绘制和算法开发等。
通过Matlab,用户可以进行复杂的矩阵运算、符号计算、非线性优化和差分方程求解等操作。
此外,Matlab还具有强大的数据分析功能,能够进行统计分析、数据可视化和模型拟合等操作。
三、控制系统设计控制系统设计是指通过控制器和执行器对系统进行控制的过程。
Matlab提供了一系列用于控制系统设计的工具箱,如Control System Toolbox和Simulink等。
Control System Toolbox是Matlab中用于控制系统分析和设计的工具箱。
它包含了各种用于系统建模、控制器设计和仿真的函数和工具。
例如,用户可以使用Transfer Function对象来描述系统的传输函数,并使用该对象进行稳定性分析和控制器设计。
此外,Control System Toolbox还提供了多种控制器设计方法,如根轨迹法、频域法和状态空间法等,可以满足不同系统的设计需求。
Simulink是Matlab中的一个仿真工具,用于建立动态系统的模型和仿真。
通过Simulink,用户可以使用图形界面建立系统的模型,并使用各种模块来描述系统的构成和行为。
Simulink提供了广泛的预定义模块,包括传感器、执行器、控制器等。
matlab控制系统仿真设计
matlab控制系统仿真设计Matlab控制系统仿真设计控制系统是现代工业领域中的关键技术之一,用于实现对系统行为的预测和调节。
在控制系统设计中,仿真是一个重要的工具,可以帮助工程师和研究人员理解和评估系统的性能。
在本文中,我们将以Matlab的控制系统仿真设计为主题,介绍控制系统仿真的基本概念、方法和工具。
一、控制系统仿真基础1.1 什么是控制系统仿真?控制系统仿真是指通过计算机模拟系统的动态行为来评估和验证控制策略的一种方法。
仿真可以帮助工程师在构建实际系统之前,通过计算机模型对系统的运行过程进行预测和分析。
1.2 为什么要进行控制系统仿真?控制系统仿真可以帮助工程师在实际系统建造之前对系统进行评估和优化。
它可以提供系统的动态响应、稳定性、鲁棒性等信息,帮助工程师优化控制策略和设计参数。
此外,仿真还可以帮助工程师调试和验证控制算法,减少实际系统建造和测试的成本和风险。
1.3 Matlab在控制系统仿真中的作用Matlab是一款功能强大的科学计算软件,也是控制系统仿真的重要工具之一。
Matlab提供了丰富的控制系统设计和分析工具箱,使得控制系统仿真变得更加简单和高效。
二、Matlab控制系统仿真设计的步骤2.1 确定系统模型在进行控制系统仿真设计之前,首先需要确定系统的数学模型。
系统模型可以通过物理原理、实验数据或系统辨识方法得到。
在Matlab中,可以使用符号计算工具箱或数值计算工具箱来建立系统的数学模型。
2.2 设计控制器根据系统模型和性能要求,设计合适的控制器。
常用的控制器设计方法包括PID控制、根轨迹设计、频率响应设计等。
在Matlab中,可以使用Control System Toolbox来设计控制器,并进行性能分析和优化。
2.3 仿真系统响应利用Matlab的仿真工具,对系统进行动态仿真,观察系统的响应。
仿真可以根据预先设定的输入信号和初始条件,计算系统的状态和输出变量随时间的变化。
MATLAB系统仿真试题复习资料,有答案
PART I 教材复习要点第一章 MATLAB 入门测试1.11.MATLAB 的命令窗口的作用是什么?编辑/调试窗口?图象窗口? MATLAB 命令窗口是MATLAB 起动时第一个看到的窗口,用户可以在命令窗口提示符">>"后面输入命令,这些命令会被立即执行。
命令窗口也可以用来执行M 文件。
编辑/调试窗口是用来新建,修改或调试M 文件的。
图像窗口用来显示MATLAB 的图形输出。
2.列出几种不同的得到MATLAB 帮助的方法。
(1)在命令窗口中输入help <command_name>,本命令将会在命令窗口中显示关于些命令的有信息。
(2)在命令窗口中输入lookfor <keyword>,本命令将会在命令窗口中显示所有的在第一注释行中包含该关键字的命令和函数。
(3)通过在命令窗口输入helpwin 或helpdesk 启动帮助浏览器,或者是在启动板中选择"Help"。
帮助浏览器包含了基于超文本的MATLAB 所有特性的描述,HTML 或PDF 格式的在线手册,这是MATLAB 最全面的帮助资源。
3.什么是工作区?在同一工作区内,你如何决定它里面存储了什么?工作区是命令、M 文件或函数执行时被MATLAB 使用的变量或数组的收集器,所有命令都在命令窗口(所有的脚本文件也是从命令窗口执行)共享公共工作区,因此它们也共享所有变量,工作区的内容可以通过whos 命令来查看,或者通过工作区浏览器来图形化地查看。
4.你怎样清空MATLAB 工作区内的内容?要清除工作区的内容,只需在命令窗口中输入clear 或clear variables 即可。
第二章MATLAB 基础测试2.11.数组,矩阵,向量有什么区别?数组是在内存中被组织成行和列的数据集合,只有一个名称,数据要通过在数组名后面圆括号里加上表示数据所在行和列的数字来访问。
MATLAB控制系统的仿真
C R
x1 x2
0 1
L
u
L
y [1
0]
x1 x2
[0]u
•
x Ax bu
y CT x du
• 没有良好的计算工具前:系统建立、变换、分析、设 计、绘图等相当复杂。
• MATLAB控制系统软件包以面向对象的数据结构为基 础,提供了大量的控制工程计算、设计库函数,可以 方便地用于控制系统设计、分析和建模。
Transfer function:
s+1 ------------s^2 + 5 s + 6
Matlab与系统仿真
22
应用——系统稳定性判断
系统稳定性判据: 对于连续时间系统,如果闭环极点全部在S平面左半平面,
则系统是稳定的;
若连续时间系统的全部零/极点都位于S左半平面, 则系统是——最小相位系统。
Matlab与系统仿真
38
4.2 动态特性和时域分析函数
(一)动态特性和时域分析函数表 (二)常用函数说明 (三)例子
Matlab与系统仿真
39
(一)动态特性和时域分析函数表 ——与系统的零极点有关的函数
表8.6前部分p263
Matlab与系统仿真
40
——与系统的时域分析有关的函数
Matlab与系统仿真
Matlab与系统仿真
8
4.1 控制工具箱中的LTI对象
Linear Time Invariable
(一)控制系统模型的建立 (二)模型的简单组合 (三)连续系统和采样系统变换(*略)
Matlab与系统仿真
9
(一)控制系统模型的建立
➢ MATLAB规定3种LTI子对象:
• Tf 对象—— 传递函数模型 • zpk 对象—— 零极增益模型 • ss 对象—— 状态空间模型
如何在MATLAB中进行仿真实验
如何在MATLAB中进行仿真实验1. 引言在科学研究和工程设计中,仿真实验是一种重要的手段和工具。
通过建立数学模型和使用计算机来模拟和分析实际系统,可以在较短时间内获得大量有效的数据和结果。
MATLAB是一个功能强大的数值计算软件,广泛应用于仿真实验中。
本文旨在介绍如何在MATLAB中进行仿真实验,并探讨一些实验技巧和注意事项。
2. 确定仿真目标和建立数学模型在进行仿真实验之前,首先需要明确仿真的目标和问题。
例如,如果要研究一个物理系统的动态特性,可以考虑建立相应的微分方程或差分方程模型。
对于控制系统的仿真,可以使用传递函数或状态空间模型。
在MATLAB中,可以使用符号计算工具箱来建立数学模型,并将其转化为可用的形式。
3. 编写仿真程序一旦数学模型建立完成,就可以开始编写仿真程序。
MATLAB提供了丰富的函数和工具箱,可以方便地进行仿真实验。
首先,可以使用ODE或PDE求解器来求解微分方程或差分方程模型。
对于控制系统的仿真,可以使用control工具箱中的函数来进行系统响应和稳定性分析。
4. 参数设置和输入规划在进行仿真实验时,需要对系统的参数和输入进行设置。
参数包括系统的初始条件、物理特性和环境因素等,可以通过改变参数的值来观察系统的响应。
输入规划可以是恒定的、随机的或基于特定函数的,可以根据实际需求进行设定。
MATLAB提供了丰富的函数和工具箱,可以方便地对参数和输入进行设置和规划。
5. 数据可视化和结果分析仿真实验的一个重要任务是对仿真数据进行可视化和结果分析。
MATLAB提供了强大的绘图函数和工具箱,可以绘制各种图表,如曲线图、散点图、三维图等。
可以使用这些功能来展示仿真数据的时域和频域特性,以及系统的稳定性和响应。
同时,还可以使用MATLAB进行数据统计和处理,如求取平均值、方差、相关性等。
6. 优化和参数调整仿真实验可以帮助优化系统设计和参数调整。
通过对仿真结果的观察和分析,可以发现系统存在的问题和改进的空间。
如何使用Matlab进行控制系统仿真
如何使用Matlab进行控制系统仿真概述控制系统在工程领域中扮演着重要角色,它用于控制和管理各种工程过程和设备。
而控制系统仿真则是设计、开发和测试控制系统的关键环节之一。
Matlab作为一种功能强大的工程计算软件,提供了丰富的工具和功能,可以帮助工程师进行控制系统仿真。
本文将简要介绍如何使用Matlab进行控制系统仿真,以及一些实用的技巧和建议。
1. Matlab的基础知识在开始控制系统仿真之前,有一些Matlab的基础知识是必要的。
首先,了解Matlab的基本语法和命令,熟悉Matlab的工作环境和编辑器。
其次,学会使用Matlab的集成开发环境(IDE)进行编程和数学建模。
熟悉Matlab的常用函数和工具箱,并了解如何在Matlab中导入和导出数据。
2. 定义系统模型在进行控制系统仿真之前,需要定义系统的数学模型。
根据具体情况选择合适的建模方法,如传递函数、状态空间或差分方程等。
在Matlab中,可以使用tf、ss 或zpk等函数来创建系统模型,并指定系统的参数和输入信号。
此外,Matlab还提供了Simulink这一强大的图形化建模环境,方便用户以图形化界面设计系统模型。
3. 设计控制器控制系统仿真的关键是设计合适的控制器,以实现所需的控制目标。
Matlab提供了各种控制器设计方法和工具,如PID控制器、根轨迹法、频域方法等。
用户可以使用Matlab的Control System Toolbox来设计和分析控制器,并在仿真中进行验证。
此外,Matlab还支持自适应控制和模糊控制等高级控制方法,可根据具体需求选择合适的方法。
4. 进行仿真实验在完成系统模型和控制器设计后,可以开始进行控制系统仿真实验。
首先,确定仿真实验的输入信号,如阶跃信号、正弦信号或随机信号等。
然后,使用Matlab中的sim函数将输入信号应用到系统模型中,并观察系统的输出响应。
通过调整控制器参数或设计不同的控制器,分析系统的性能和稳定性,并优化控制器的设计。
pid控制器matlab仿真

基于MATLAB的PID控制系统参数调节的仿真分析1、引言PID控制是最早发展的自动控制策略之一,PID控制系统由比例单元(P)、积分单元(I)和微分单元(D)组成。
具有简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
PID控制的参数自动调整是通过智能化调整或自校正、自适应算法来实现。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
本文首先从PID理论出发,建立模型,讨论系统的稳定性,快速性,准确性。
利用MATLAB对PID控制的参数进行仿真,设计不同的参数,以使系统满足所要求的性能指标。
2、控制领域有一个很重要的概念是反馈,它通过各种输出值和它们各自所需值的实时比较的度量—各种误差,再以这些误差进行反馈控制来减少误差。
这样形成的因果链是输入、动态系统、输出、测量、比较、误差、输入构成的一个环路,因而也构成了包含原动态系统在内的一个新的动态闭环系统。
采用反馈的基本原因是要在不确定性存在的条件下达到性能目标。
许多情况下,对于系统的了解是不全面的,或者可用的模型是基于许多简化的假设而使它们变得不透彻。
系统也可能承受外界干扰,输出的观测常受噪声干扰。
有效的反馈能减少这些不确定性的影响,因为它们可以补偿任何原因引起的误差。
反馈概括了很广泛的概念,包括当前系统中的许多回路、非线性和自适应反馈,以及将来的智能反馈。
广义的讲,反馈可以作为描述和理解许多复杂物理系统中发生的循环交互作用的方式。
在实际的过程控制和运动控制系统中,PID占有相当的地位,据统计,工业控制中 PID 类控制器占有 90%以上。
matlab仿真自动控制原理

matlab仿真自动控制原理
MATLAB仿真自动控制原理
自动控制原理是研究自动调节系统的基本理论和方法,MATLAB作为一款强大的数学仿真软件,为自动控制原理的研究提供了良好的平台。
MATLAB在自动控制原理的研究中,主要包括以下内容:
1. 系统动态模型的建立:根据自动调节系统的特性及其输入输出关系,建立数学模型,并进行仿真。
2. 系统稳态性能分析:计算系统的稳态误差和静态增益等指标,确定系统的增益校正和调节参数。
3. 系统动态性能分析:分析系统的过渡过程、阻尼比和动态特性,确定系统的控制参数。
4. 设计控制器:根据系统模型和目标性能要求,设计合适的控制器,如比例积分控制器、比例积分微分控制器等。
5. 仿真验证:通过MATLAB仿真,验证控制器的性能和控制效果。
通过MATLAB仿真自动控制原理,不仅可以方便地进行各种控制系统的设计与分析,同时也可以通过仿真验证的方法,快速评估和分析不同控制策略的优劣,提高控制系统的稳定性和性能。
MATLAB控制系统仿真实验模板新
MATLAB控制系统仿真实验模板新
建立一个MATLAB控制系统仿真实验模板,可以按照以下步骤进行:
1. 定义系统模型:定义系统的数学模型,包括传递函数、状态空间方程或差分方程等。
2. 设计控制器:根据系统模型和控制要求,设计控制器,可以是PID控制器、模糊控制器、最优控制器等。
3. 选择仿真工具:选择MATLAB的Simulink仿真工具,可以通过拖拽元件和连接线的方式构建仿真模型。
4. 进行仿真实验:设置仿真参数,运行仿真实验,观察系统的动态响应和稳态性能。
5. 分析仿真结果:根据仿真结果,评价系统的控制效果,优化控制器设计或系统参数调整。
6. 输出实验报告:根据实验结果,输出实验报告,包括系统模型、控制器设计、仿真结果分析和结论等。
在创建模板时,可以使用MATLAB的模板功能,在文件-新建-模板选项中选择Simulink模板,然后选择控制系统仿真实验模板。
输入模板名称后保存即可。
使用模板时,可以根据具体实验要求修改系统模型、控制器、仿真参数等,以完成具体实验内容。
如何在MATLAB中进行控制系统的建模与仿真
如何在MATLAB中进行控制系统的建模与仿真在现代工程领域中,控制系统的建模与仿真是必不可少的一项技术。
MATLAB 作为一种强大的科学计算软件,并提供了丰富的工具箱,可以帮助工程师们快速而准确地进行控制系统的建模和仿真。
本文将介绍如何在MATLAB中进行控制系统的建模与仿真的一般步骤和注意事项。
一、引言控制系统是一种以实现某种特定目标为目的对系统进行调节和控制的技术,在现代工程中得到了广泛的应用。
控制系统的建模与仿真是控制系统设计的重要环节,通过建立系统的数学模型,可以对系统的性能进行有效地评估和分析,从而为系统的设计和优化提供指导。
二、MATLAB中的控制系统建模工具箱MATLAB提供了专门的控制系统工具箱,包括线性和非线性系统建模、控制器设计与分析等功能。
其中,Simulink是MATLAB中最重要的控制系统建模工具之一,它可以方便地用来搭建控制系统的框架,并进行仿真与分析。
三、建立控制系统数学模型在进行控制系统的建模之前,需要先确定系统的类型和工作原理。
常见的控制系统包括开环控制系统和闭环控制系统。
开环控制系统中,控制器的输出不受被控对象的反馈作用影响;闭环控制系统中,控制器的输出受到被控对象的反馈作用影响。
在MATLAB中,可以通过使用Transfer Function对象或State Space对象来表示控制系统的数学模型。
Transfer Function对象用于线性时不变系统的建模,可以通过给定系统的分子多项式和分母多项式来定义一个传递函数;State Space对象则适用于非线性时变系统的建模,可以通过状态空间方程来定义系统。
四、利用Simulink搭建控制系统框架Simulink是一种基于图形化编程的建模仿真工具,在MATLAB中可以方便地使用它来搭建控制系统的框架。
通过简单地拖拽、连接不同的模块,可以构建出一个完整的控制系统模型。
首先,打开Simulink,选择相应的控制系统模板或从头开始设计自己的模型。
控制系统的MATLAB计算及仿真
控制系统的MATLAB计算及仿真控制系统是一种用来实现对物理系统或工程系统进行控制的方法和工具。
MATLAB是一种强大的计算机软件包,能够方便地进行控制系统的计算和仿真。
本文将介绍MATLAB在控制系统中的应用,并以一个简单的例子来说明如何用MATLAB进行控制系统的计算和仿真。
首先,我们需要打开MATLAB软件并创建一个新的脚本文件。
在脚本文件中,我们可以使用MATLAB提供的函数来定义控制系统的传递函数和状态空间模型。
例如,我们可以使用tf函数来定义一个传递函数模型。
传递函数是描述系统输入与输出之间关系的一种数学模型。
以下是一个例子:```MATLABs = tf('s');G=1/(s^2+2*s+1);```这个传递函数模型表示一个具有二阶惯性的系统。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(G);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
此外,MATLAB还提供了许多其他的函数和命令来计算和仿真控制系统。
另外,我们还可以使用stateSpace函数来定义一个状态空间模型。
状态空间模型是控制系统中另一种常用的数学模型。
以下是一个例子:```MATLABA=[01;-1-1];B=[0;1];C=[10];D=0;sys = ss(A, B, C, D);```这个状态空间模型描述了一个二阶系统的状态方程和输出方程。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(sys);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
除了step函数外,MATLAB还提供了许多其他的函数和命令来计算和仿真状态空间模型。
在控制系统中,还常常需要对系统进行参数调节和性能优化。
MATLAB提供了一系列的控制系统工具箱,用于进行控制系统的分析和设计。
例如,Control System Toolbox提供了用于线性系统分析和设计的工具。
基于matlab simulink的控制系统仿真及应用

基于matlab simulink的控制系统仿真及应用Simulink是MATLAB的一个附加组件,它提供了一种可视化建模和仿真环境,主要用于控制系统、信号处理、通信系统等领域的建模和仿真。
以下是一个简单的基于Simulink的控制系统仿真的步骤:
1. 模型建立:首先,你需要使用Simulink库中的模块来构建你的控制系统模型。
这些模块包括输入、输出、控制算法等。
你可以直接从库中拖放模块到你的模型中,然后通过连接线将它们连接起来。
2. 参数设置:在连接模块后,你需要为每个模块设置适当的参数。
例如,对于传递函数模块,你需要输入分子和分母的系数。
3. 仿真设置:在完成模型和参数设置后,你需要设置仿真参数,例如仿真时间、步长等。
4. 运行仿真:最后,你可以运行仿真并查看结果。
Simulink提供了多种方式来查看结果,包括图形和表格。
在Simulink中,你可以使用许多内建的工具和函数来分析和优化你的控制系统。
例如,你可以使用MATLAB的控制系统工具箱中的函数来分析系统的稳定性、频率响应等。
总的来说,Simulink是一个强大的工具,可以用于设计和分析各种控制系统。
通过学习和掌握这个工具,你可以更有效地进行控制系统设计和仿真。
Matlab控制模型及仿真技术

系统优化与改进
参数优化
通过Matlab的优化工具箱,对控制系统的参数进行优化,提高 系统性能。
结构优化
对控制系统的结构进行改进,如采用串级控制、解耦控制等。
算法改进
对控制算法进行改进,以提高系统的响应速度和稳定性。
05
Matlab控制模型及仿真技术案 例分析
02
控制模型的建立
传递函数模型
总结词
传递函数模型是控制系统中最常用的数学模型之一,它描述递函数模型基于系统的输入和输出信号,通过拉普拉斯变换或Z变换等方法, 将时域中的系统响应转换为频域中的传递函数。传递函数模型具有明确的物理 意义,能够直观地反映系统的动态特性。
案例三:离散时间系统仿真与分析
01
3. 使用Matlab的控制系统工具 箱进行系统分析和设计。
02
4. 进行仿真实验,验证系统的 性能。
03
案例应用:例如设计一个数字 通信系统,通过分析系统的误 码率和信噪比等参数,优化系 统的性能。
THANKS
感谢观看
案例二:非线性控制系统仿真
2. 建立非线性系统的数学 模型。
1. 确定系统的非线性特性。
设计步骤
01
03 02
案例二:非线性控制系统仿真
01
3. 使用Matlab的控制系统工具箱进行系统分析和设
计。
02 4. 进行仿真实验,验证系统的性能。
03
案例应用:例如设计一个飞行器控制系统,通过控制
飞行器的姿态和高度等参数,实现稳定的飞行。
案例三:离散时间系统仿真与分析
• 离散时间系统:离散时间系统是指系统的状态只在离散时刻发生变化,而在其 他时刻系统的状态保持不变的系统。在Matlab中,可以使用Simulink等工具 进行建模和仿真。
Matlab控制系统仿真(1)
一. 控制系统的模型与转换目前大多数控制系统的分析设计方法都要求系统的模型已知。
所以,控制系统的数学模型是控制系统分析和设计的基础。
获得数学模型的方法有两种:一种是从已知的物理规律出发,用数学推导的方法建立系统的数学模型,另外一种就是利用试验数据拟合。
前一种方法称为系统的物理建模方法,而后者称为系统辨识,两者各有优势和适用场合。
一般的分析研究中将控制系统分为连续系统和离散系统,描述连线性连续系统常用的方式是传递函数(传递函数矩阵)和状态空间模型,相应的离散系统可以用离散传递函数和离散状态方程表示。
各种模型之间还可以进行相互转换。
1.1连续线性系统的数学模型连续线性系统一般可以用传递函数描述,也可以用状态方程描述。
前者是经典控制的常用模型,而后者是现代控制理论的基础。
它们是描述同一个系统的不同描述方式。
除此之外,还可以用零极点的形式表示连续线性系统模型。
本章着重介绍这些数学模型,并侧重介绍这些模型在控制系统的Matlab 环境下的表示方法。
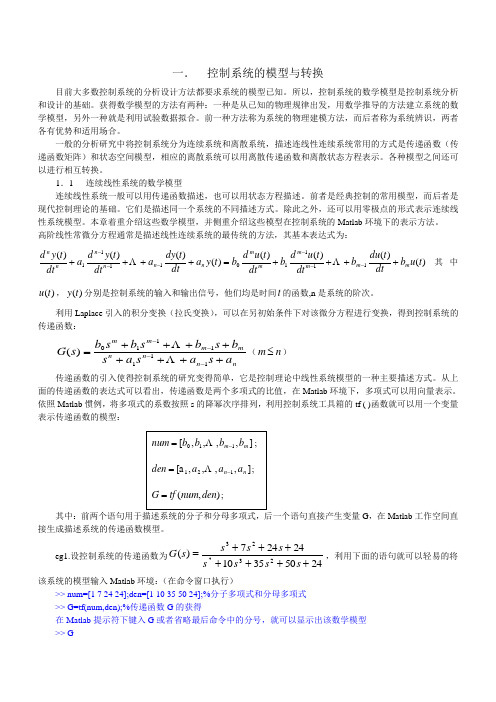
高阶线性常微分方程通常是描述线性连续系统的最传统的方法,其基本表达式为: )()()()()()()()(11111111t u b dtt du b dtt u db dtt u d b t y a dtt dy a dtt y da dtt y d m m m m mmn n n n n n++++=++++------ 其中)(t u ,)(t y 分别是控制系统的输入和输出信号,他们均是时间t 的函数,n 是系统的阶次。
利用Laplace 引入的积分变换(拉氏变换),可以在另初始条件下对该微分方程进行变换,得到控制系统的传递函数: nn n n mm m ma s a sa sb s b s b s b s G ++++++++=----1111110)( (n m ≤)传递函数的引入使得控制系统的研究变得简单,它是控制理论中线性系统模型的一种主要描述方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计报告
题目PID控制器应用
课程名称控制系统仿真院部名称龙蟠学院
专业自动化
班级M10自动化
学生姓名
学号
课程设计地点 C208
课程设计学时一周
指导教师应明峰
金陵科技学院教务处制成绩
一、课程设计应达到的目的
应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。
应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
二、课程设计题目及要求
1.单回路控制系统的设计及仿真。
2.串级控制系统的设计及仿真。
3.反馈前馈控制系统的设计及仿真。
4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。
三、课程设计的内容与步骤
(1).单回路控制系统的设计及仿真。
(a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。
(b)画出单回路控制系统的方框图。
(c)用MatLab的Simulink画出该系统。
(d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应曲线。
注明所用PID调节器公式。
PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。
有积分作用单回路控制系统PID控制器取参数分别为:50 2 5
有积分作用单回路控制系统PID控制器取参数分别为:50 0 5
大比例作用单回路控制系统PID控制器取参数分别为:50 0 0
(e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响?
答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。
增大比例系数将加快系统的响应,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;
增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长,加入微分环节,有利于加快系统的响应速度,使系统超调量减小,稳定性增加。
(2).串级控制系统的设计及仿真。
(a)已知主被控对象传函W
01(s) = 1 / (100s + 1),副被控对象传函W
02
(s) =
1 / (10s + 1),副环干扰通道传函W
d
(s) = 1/(s2 +20s + 1)。
(b)画出串级控制系统方框图及相同控制对象下的单回路控制系统的方框图。
(c)用MatLab的Simulink画出上述两系统。
串级控制系统
单回路控制系统
(d)选PID调节器的参数使串级控制系统的控制性能较好,并画出相应的单位阶约响应曲线,PID调节器传函:主:Wc(s)=100(40s+1)/ (s+1) 副:Wc(s)=100/(20s+1)
串级控制系统系统PID控制器取参数分别为:100 1 40;2 0 0
单回路控制系统PID控制器取参数分别为:100 1 40
(e)比较单回路控制系统及串级控制系统在相同的副扰动下的单位阶约响应曲线,并说明原因?
答:比较两控制系统单位阶跃响应可得到串级控制系统的效果比较好。
原因:串级控制系统的特点是两个调节器串联,主调节器的输出作为副调节器的给定,适用于时间常数及纯滞后较大的对象。
串级控制系统改善了被控过程的动态特性,提高了系统的工作频率,具有较强的抗干扰能力,具有一定的自适应能力,能够准确及时地对系统的扰动进行校正,防止扰动对系统的影响。
(3).反馈前馈控制系统的设计及仿真。
(a)已知被控对象传函W
0(s) = 1 / (s2 +s + 1),干扰通道传函W
f
(s) = 1 / (s2
+2s + 5),前馈随机干扰信号幅值 = 50,频率 = 10。
(b)确定前馈控制器的传函W
m
(s),并画出反馈前馈控制系统的系统方框图及相应的单回路控制系统的方框图。
(c)用MatLab的Simulink画出上述两系统。
反馈前馈控制系统
单回路控制系统
(d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应曲线。
PID调节器传函:Wc(s)=30(10s+1) / (5s+1)
设干扰源幅值为50,频率为10 Hz
反馈前馈控制系统PID控制器取参数分别为:30 5 10
单回路控制系统PID控制器取参数分别为:30 5 10
(e)比较单回路控制系统及反馈前馈控制系统在相同的单位阶约扰动下的响应曲线,并说明原因?
答:单回路与前馈反馈系统的响应差别不是很大,由上图可知不加前馈时,系统受到干扰较严重,加上前馈之后,可使系统不受干扰的影响。
前馈反馈复合控制系统既发挥了前馈作用,可及时克服主要扰动对被控量影响,又可保持了反馈控制能克服多个扰动的影响。
(4).采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。
(a) 已知被控对象传函
W
0(s) = e
- 4 s
/ (20s + 1)。
(b) 画出采用Smith 补偿器的反馈控制系统的系统方框图及相应的单回路控制系统的方框图。
(c) 用MatLab的Simulink画出上述两系统。
采用Smith补偿器的反馈控制系统
单回路控制系统
(d) 选PID调节器的参数使采用Smith 补偿器的反馈控制系统的控制性能较好,并画出相应的单位阶约响应曲线。
PID调节器传函:Wc(s)=40 /(2s+1)
采用Smith补偿器的反馈控制系统scope的图像
PID控制器取参数分别为:40 2 0
采用Smith补偿器的反馈控制系统scope1的图像
PID控制器取参数分别为:40 2 0
单回路控制系统
PID控制器取参数分别为:40 2 0
由上图可知,采用smith补偿后,可以完全消除滞后对系统的影响,而单回路控制系统不能消除滞后,使系统输出产生失真。
Ws(s)=Wo(s)(1-e-τ
0s)=(1-e-
τ
0s)/(20s+1)
引入smith预估补偿器,使调节器锁控制的等效对象变为:
Wo(s)e-τ0s+Wo(s)(1-e-τ
0s)=(1-e-
τ
0s)/(20s+1)+e-
τ
0s/(20s+1)=1/(20s+1)=Wo(s)
从而消去纯滞后部分对系统稳定的不利影响。
(e) 比较单回路控制系统及采用Smith 补偿器的反馈控制系统在相同的单位阶跃扰动下的响应曲线,并说明原因?
答:在没有补偿的时候,其单位阶跃响应曲线在扰动下发生的位置相对靠后,但是增加了滞后补偿环节,它的图像发生的靠前了,这就是增加了补偿的原因。
由上图可知,采用smith补偿后,可以完全消除滞后对系统的影响,而单回路控制系统不能消除滞后,使系统输出产生失真。
四、问题和解决方法
在本课程设计中遇到不少的问题,主要体现在对PID调节的理解薄弱,导致后面的对PID参数的调节有一定的盲目性,不了解PID在系统的性能调控中起到的作用,在以上的过程中,主要体现在响应曲线的平滑性不怎么好,超调时间过长,影响对结果的分析,后通过对PID调节进行资料的查询,翻阅相关的书籍,加深理解,使得在响应曲线的调节过程中调节变得有目的性,最终使调节出来的响应曲线符合课程设计的要求。
五、心得体会
在课程设计的过程中,通过对所遇到的问题进行分析和思考,加深了对课本知识的理解,同时也通过课程设计,使我的相应的知识水平和对MATLAB的使用也获得了一定的提高。
在对PID参数的调节过程中,我总结出了PID调节的几个特点:增大比例系数一般将加快系统的响应,在有静差的情况下有利于减小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长;增大微分时间有利于加快系统的响应速度,使系统超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。
同时也通过课程设计,我的相应的知识水平也获得了一定的提高。
六.主要参考文献
1.陈怀琛.MATLAB及在电子信息课程中的应用.北京:电子工业出版社,2009 2.赵广元.MATLAB与控制系统仿真实践.北京:北京航空航天大学出版社,2009。