基于PLC的无人机起落架综合测试系统设计
PLC与变频器实现机场行李系统电气自动化控制论文

PLC与变频器实现机场行李系统电气自动化控制论文摘要:PLC和变频器在电气自动化控制的设计过程中发挥着重要作用,通过自动化控制系统设计,能够减少工作负荷量,起到很好的调速控制效果,在应用操作系统的过程中,能够通过利用可编程控制程序进行电气运行过程中的良好管理和控制,及时的发现故障所在,能够进行准确的检查,保证整个系统的良好运行和发挥功效,在不断的发展过程中,逐渐实现了电气自动化、智能化、高效率化等运行特性,不断的推动了我国电气行业的快速稳定发展。
随着我国科学技术的发展和进步,我国在电气设备自动化控制和管理发生了很大的改变,在电气自动化控制管理过程中,对其科学技术的发展进步进行了进一步的综合变革,PLC与变频器在大型电气设备的自动化控制管理过程中也发挥着非常重要的作用。
因此重视对其自动化控制技术的实施和改善,不断的促进我国电气设备自动化控制和管理,能够有效的提高我国电气自动化控制设计水平。
1.可编程逻辑控制PLC技术分析PLC,就是可编程逻辑控制器,在使用过程中,是一种被广泛的应用于工业生产同时能够对计算机系统实现有效的控制的电子操作系统,在系统使用过程中,硬件处理和PC相似,在处理过程中,通过中央处理器集成电路对单元模块、通信模块等进行有效的控制和管理,同时利用系统编程的存储器进行逻辑运算控制,通过发出指令,从而能够利用指令进行操作和执行。
在整个操作系统的应用过程中,其操作是非常简单的,配件也比较齐全,性价比较高,编程也比较简单,使得PLC技术已经逐渐成为了当前我国电气行业实现自动化控制的有效技术,再加上其独特的抗干扰能力,使得整个PLC技术的应用领域不断拓展,形成了很多稳定的生产线。
在当前PLC技术实施控制管理的过程中,已经逐步实现了逻辑管理控制、运动控制、数据控制等多个控制系统的运行。
2.变频器的技术特点介绍变频器在使用过程中,能够通过应用PLC技术实现对电力半导体软件的连通和切断,在使用过程中,能够使得工频电源产生非常大的变化,下面我简单对变频器的技术特点进行简要分析介绍。
基于PLC及机器视觉的无刷电机负载性能自动测试系统设计

基于PLC及机器视觉的无刷电机负载性能自动测试系统设计在科技的海洋中,无刷电机如同一艘精密的航船,其负载性能的稳定性和可靠性是航行的关键。
为了确保这艘航船能在波涛汹涌的实际应用中稳健前行,我们需要一套高效、智能的自动测试系统来检验其性能。
本文将探讨如何利用PLC(可编程逻辑控制器)和机器视觉技术,打造一个如鹰眼般敏锐、如机械臂般精准的无刷电机负载性能自动测试系统。
首先,让我们想象一下,PLC就像是这套系统的“大脑”,它负责接收传感器的信号,处理数据,并发出指令控制整个测试流程。
而机器视觉则相当于一双“慧眼”,它能够捕捉到电机运转中的细微变化,为PLC提供精确的图像信息。
这两者的结合,就像是给测试系统装上了一对翅膀,让它能够在复杂的测试环境中游刃有余。
接下来,我们来分析一下这个系统的核心组成部分。
PLC作为控制中心,需要具备高度的稳定性和灵活性。
它不仅要能够处理复杂的逻辑运算,还要能够与各种传感器和执行器无缝对接。
在设计时,我们可以采用模块化的思路,将不同的功能划分为不同的模块,通过编程实现各模块之间的协调运作。
这样既保证了系统的灵活性,又便于后期的维护和升级。
而机器视觉部分,则需要一套高分辨率、高速度的图像采集系统。
它需要能够在毫秒级的时间内捕捉到电机运转的瞬间状态,并通过算法分析出电机的性能参数。
这里我们可以运用一些先进的图像处理技术,比如边缘检测、特征提取等,来提高分析的准确性和效率。
在测试过程中,我们还需要考虑如何模拟实际的工作条件。
这时,可以设计一套可调节的负载装置,通过改变负载的大小和类型,来模拟电机在不同工作状态下的性能表现。
同时,还可以引入温度、湿度等环境因素的控制,以考察电机在极端环境下的适应性。
最后,不要忘记数据的记录和分析。
一个完善的自动测试系统应该能够自动记录测试数据,并通过图表或报告的形式展现出来。
这样不仅便于工程师分析和判断,也有利于后期的产品改进和质量控制。
综上所述,基于PLC及机器视觉的无刷电机负载性能自动测试系统,就像是一座由钢铁和智慧构筑的灯塔,它照亮了电机性能测试的未来之路。
基于PLC的天车无人化控制系统设计研发及应用
基于PLC的天车无人化控制系统设计研发及应用【摘要】介绍全国首家天车无人化控制系统设计及应用.该系统结合传感器技术、PLC技术拟合曲线法研发了摆角控制技术,实现了天车多模式控制、全自动运行、设备全天候监视和钢卷跟踪等功能.应用表明,系统显著提高了天车效率和平稳度,降低了天车工劳动强度和天车点检难度,增加了天车可靠性.为库房管理和物流工艺发展升级提供了坚实的设备基础。
【关键词】天车控制天车无人化PLC 摆角控制全天候监视1 引言目前,国内外绝大多数天车控制模式中,均采用纯电气控制。
在很大程度上限制了天车控制水平进步、库房管理和物流工艺的发展和升级。
传统天车,操作工长期暴露在危险环境下从事高强度重复性劳动;天车利用效率低,动作平稳程度不高;天车属于高空作业,设备不易点检,故障不易发现[1].唐钢于2014年着手自主研发并最终在国内首次应用天车无人化控制系统很好的解决了这些问题。
2 设计方案以实现天车全自动和天车设备全天候监控为目的,综合无线网络技术、PLC控制技术和HMI技术,设计天车无人化控制系统.一套可靠的PLC系统,需要具备多种环境下的处置能力,据此采用手动模式、自动模式、遥控模式、维护模式四结合的原则,实现天车控制方式多样化。
基于面向对象原则,将系统划分为命令层、基础层、执行层,如图1所示,依托现场总线技术和无线通讯技术串接PLC控制系统、传感器、传动设备,实现控制精准化.明确控制对象,划分控制功能,分别为大车控制、小车控制、主钩升降控制、主钩旋转控制、天车摆角控制、天车防撞控制、夹钳控制、钢卷跟踪、事件中断及手动干预的处理、参数设定、故障报警、人机接口等功能.作为智能化库房的设备控制部分,建立完善的通讯结构,保障系统与WMS进行实时数据通讯,接收WMS下发工单,反馈天车和钢卷信息,生成信息数据流,为生产物流提供数据支撑.图1 控制系统层次划分及系统结构图3 硬件结构采用西门子S7—300 PLC及ET200远程站做为控制架构,组成命令层,结合传感器状态,经由连锁和逻辑判断对执行层下达具体动作命令;执行层包括ABB变频器及其控制的电机等传动装置,通过Profibus工业总线接收命令层指令进行电机等设备的动作;基础层由各种传感器组成,对天车实际动作和当前状态进行检测,并反馈到命令层PLC中,作为PLC系统命令的触发与连锁信号。
基于FX_(2N)PLC控制的飞机起落架作动筒液压测试系统
4 MT,有 输 入 2 8 4个端
子 ,输 出 2 4个 端 子 .
采 用 直 流 晶体 管输 出
型 。 P C 的 接 线 图 如 L 图 4所 示 , 各 指 示 灯
均 为 L D 灯 , 需 要 分 E 图 3 梯 形 图程 序 别 串接 一 个 2 Q 的 限 k
流 电阻 R。
北 京 : 电 子 工 业 出版 社 .2 1 . 01
4结 束 语
该 型 飞机 起 落架 作 动筒 液 压 测 试 系 统 具 有 以下 特 点 。 ( )性 能稳 定 可靠 ,满 足测 试 要 求 1 该 测 试 系 统 电 气 控 制 部 分 采 用 P C控 制 , 自动 化 程 度 L 高 ,系统 运 行 稳 定 、可 靠 ,能 很 好 地 满 足 测 试 需 要 。 ( ) 液压 回路 高 、低 压 并 存 ,大 跨 距 、高 精 度 加 载 2 液 压 回 路 高 压 1MP 、 低 压 04 a 最 大 加 载 力 4 a .MP , 500 0 0 N,最 小 加 载 力 2 0 N,加 载 力 跨 距 大 ,加 载 力 误 差 00 不 超 过 ± . ,加 载 力 精 度 高 。 01 % ( )操 作 使 用 方 便 ,易 学 好 用 3 采 用 交 流 和 直 流 两 块 P C控 制 , 控 制 程 序 设 计 合 理 . L
版 社 .2 0 . 0 1
f ]HI J 工 作 室.三 菱 F N 系列 微 型 可 编 程 控 制 器使 用 手 册 3 ME I X2
程 序 中 T 9定 时 器 控制 。程 序 10 14为 各 指 示 灯 显 示 。 3 2~3
[ .E本 三 菱 电 气公 司 ,1 9 . Z] l 99 [ ] 杨 后 川 ,张 春 平 , 张 学 民 ,等 .三 菱 P C 应 用 10例 [ ] . 4 L 0 M
一种基于PXI技术的无人机综合测试系统
2 4 1模拟通道
集格式等有关初始设置数据,完成通道选择、数据采
自检采片j两种方式。 一是设置校验通道,在测试 集、数据存储等任务。
过程巾始终对其进行监视,以便对系统的T=作状态进
数据处理软件接收采集的原始数据及串u发送
行全程检查;二是在所有通道输入标准信号,在测试 前对各通道进行扫描式检查.以完成开机自检。 2.4 2串行数字通道
参考文献(3条) bWindows/CVI User Manual 1999 2.虚拟仪器产品与技术 1999 3.he Measurement and Automation Catalog 2000
相似文献(10条)
1.期刊论文 宋青.权伟龙.杜三山 QZD-1机载设备综合测试系统设计与实现 -兰州铁道学院学报2003,22(6)
以航空机载设备的维护测试为目标,采用目前国际测控领域流行的VXI测试总线硬件结构和Lab-windows/CVI虚拟仪器软件开发平台,研制了QZD-1机载 设备综合测试系统.重点介绍了QZD-1机载设备综合测试系统的组成,数据库管理软件和测试软件等系统软件的设计,专家诊断系统的构思与实现.该系统具 有通用性,综合性,自动化程度高,故障覆盖率和诊断准确率较高等特点.
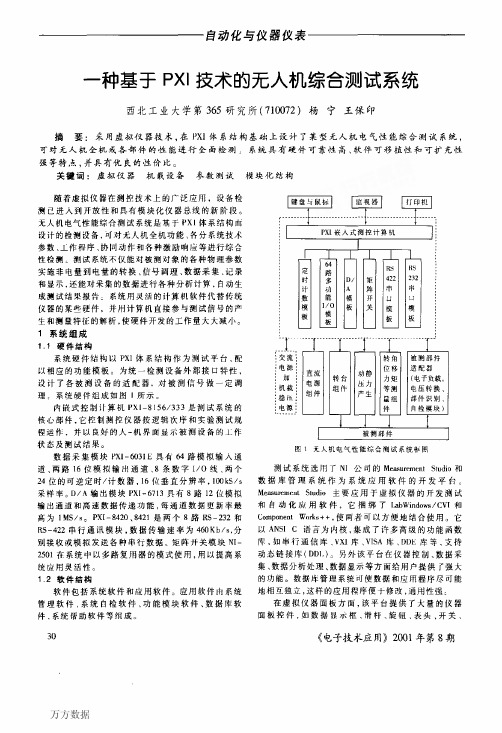
系统硬件结构以PxI体系结构作为测试平台,配 以相应的功能模板。为统一检测设备外部接口特性, 设计了各被测设备的适配器,对被测信号做一定凋 理:系统硬件组成如图l所示。
内嵌式控制i|算机PxI一8I 56/33 3是测试系统的 核心部件,它控制测控仪器按逻辑次序和实验测试规 程运作.并以良好的人一机界面显示被测设备的工作 状态及测试结果。
:
崩3鹰用软件框图
系统管理软件协凋各功能模块的时序关系.监视 各功能模块和数据库的运行状态,控制各功能模块及 数据库之间的调用,在页面上提供了用户对硬件和软 件系统的管理和设定功能。系统管理软件采用多线程编 程技术,以提高系统响应能力并进行平滑的后台处理。
基于PLC的人机对弈系统设计

基于PLC的人机对弈系统设计
杨小强
【期刊名称】《邢台职业技术学院学报》
【年(卷),期】2018(035)001
【摘要】本文基于PLC设计开发了一种与人进行五子棋对弈的机器人系统,利用视觉系统对棋盘信息进行获取,由算法系统做出落子决策,再通过PLC对落子行列数进行数据转换,最后由六轴机器人完成动作.重点研究PLC在总体系统中起到的数据转换原理,以及上下位机的数据连接与实现.实验证明,基于PLC设计的五子棋人机对弈系统具有实用、形象、可靠等特点.
【总页数】4页(P76-79)
【作者】杨小强
【作者单位】重庆科创职业学院,重庆 402160
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于PLC的无人机起落架综合测试系统设计 [J], 梁凤麒;嵇治刚;王丽雅;丛晖;牛志朝
2.Arduino与MATLAB混合模式人机对弈系统设计方法 [J], 曹国强;张京龙;刘禹廷;刘浩然
3.一个基于规则的人机对弈系统的设计与实现 [J], 方建超
4.基于QT的中国象棋人机对弈的设计思路与实现 [J], 李天昊; 何永悦
5.基于PLC的系留无人机地面控制系统设计 [J], 周远兴;陈俊良;魏文彬;章百宝;邓博文
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的飞机起动系统综合检测仪的研制
基于PLC的飞机起动系统综合检测仪的研制于春风;郝世勇;于守淼【期刊名称】《自动化技术与应用》【年(卷),期】2012(031)008【摘要】The working behavior of aircraft starting system's electric equipments is directly related to the completion of flight training and combat tasks, integrated detector design takes PLC and LCD touch screen as the core. It can fully and accurately complete off-normal testing and routine calibration work of aircraft starting system's electrical equipments in one aircraft. The system uses a multi-channel synchronous measurement technology to accurately complete the detection of multi-channel time parameters and uses high-powcv signal simulation technology to complete the signal input of the high-precision power, it makes the tester higher test precision and accuracy. In addition, it is calibration function integration, easy extensibility design, zero misuse design and the design of intelligent online testing & guiding system that makes the tester efficiently meets the actual work demand of the naval air force front-line troops, and it brings significant military and economic benefits.%飞机发动机起动系统电气设备工作性能的好坏直接关系到飞机训练及作战任务的完成.综合检测仪以可编程控制器和液晶触摸屏为核心进行一体化集成设计,能够全面准确完成某型飞机所装配的起动系统电气设备的离位检测及日常校验工作.系统采用多通道同步测时技术准确完成多通道时间参数的检测,采用大功率信号模拟技术完成高精度功率的信号输入,使试验器具有较高的的测试精度和准确性.此外,校验功能集成和易扩展性设计、零误操作设计和智能在线测试指导系统的设计使试验器高效的满是海军航空兵一线部队的实际工作需求,具有显著的军事效益和经济效益.【总页数】4页(P61-63,66)【作者】于春风;郝世勇;于守淼【作者单位】海军航空工程学院青岛分院,山东青岛266041;海军航空工程学院青岛分院,山东青岛266041;海军航空工程学院青岛分院,山东青岛266041【正文语种】中文【中图分类】TP571.61【相关文献】1.飞机电力起动系统故障在线检测仪的研制 [J], 刘爱元;杜鑫2.飞机起动发电机起动性能校验台研制 [J], 王正;张六韬;朱兴动3.某型飞机起动机误起动故障分析和报警电路研制 [J], 任可;陈建明4.基于飞机刹车防滑系统检测仪的机轮带速装置研制 [J], 严共鸣;赵德春;赵智明;杨安元5.基于PLC的飞机电气附件综合检测仪的研制 [J], 郝世勇;王华新;于春风因版权原因,仅展示原文概要,查看原文内容请购买。
儿童乐园飞机控制系统设计plc
儿童乐园飞机控制系统设计 PLC1. 引言儿童乐园是一个专为儿童设计的休闲场所,各种游乐设施广受欢迎。
其中,飞机控制系统是儿童乐园中最受欢迎的设施之一。
本文将介绍一种基于PLC(可编程逻辑控制器)的儿童乐园飞机控制系统设计。
2. 系统概述儿童乐园飞机控制系统设计的目标是为儿童提供一个安全、可靠且有趣的飞行体验。
系统由飞机、控制台和PLC组成。
飞机是通过电机驱动产生动力,控制台提供操控接口,PLC负责对飞机进行控制和监控。
3. PLC的选择PLC是工业自动化控制中常用的控制器。
在选择PLC时,需要考虑以下因素:•输入/输出模块数量和类型:飞机控制系统需要与多个传感器和执行器进行交互,因此PLC需要具备足够多的输入/输出模块,并支持不同类型的信号接口。
•处理能力:飞机的操控需要实时响应,所以PLC需要具备足够的处理能力以确保系统的实时性。
•可靠性:儿童乐园是一个高需求的环境,系统需要具备高可靠性以应对长时间运行和恶劣环境的要求。
综合考虑以上因素,我们选择了某知名PLC品牌的型号。
4. 飞机控制算法飞机的控制算法是系统设计中的关键部分。
在本文中,我们使用了简单的PID(比例、积分、微分)控制算法,其基本原理为根据飞机的当前状态(角度、速度等)计算出控制输出值,以使飞机保持在设定位置。
PID控制算法的主要参数包括比例系数、积分时间和微分时间。
通过调整这些参数,可以优化飞机的控制性能。
5. 控制台设计控制台是连接儿童和飞机的接口设备。
在设计控制台时,需要考虑以下要素:•操作界面:控制台应具备直观、易于理解的操作界面,以方便儿童进行飞机操作。
•安全性:控制台需要具备一定的安全措施,以避免儿童误操作或发生意外。
•耐用性:儿童乐园是一个高频使用的环境,控制台需要具备耐用的特性以应对长时间使用和高负荷情况。
在控制台的设计中,我们采用了简洁直观的按钮和手柄来进行飞机的控制,同时设计了防护罩和紧急停止按钮以提高安全性。
PLC在航空航天行业中的应用案例

PLC在航空航天行业中的应用案例航空航天行业是高度复杂和严格要求的行业,其生产和运营过程中需要高度自动化的控制系统来确保安全和效率。
可编程逻辑控制器(PLC)是一种广泛应用于航空航天行业的控制设备,本文将介绍PLC在航空航天行业中的应用案例。
一、航空工控系统航空工控系统是航空航天行业中必不可少的一部分,广泛应用于飞机的制造和维修过程中。
PLC作为控制系统的核心,可以对飞机的各个子系统进行实时监测和控制,确保飞机的正常运行。
例如,在飞机的液压系统中,PLC可以监测油压、温度和流量等参数,并能实时调节和控制阀门的开关,确保飞机的液压系统正常运行。
此外,在飞机的起落架控制系统中,PLC可以对起落架进行自动化控制,实现自动升降和锁定功能。
二、飞行模拟器飞行模拟器是培训飞行员和测试飞机性能的重要设备。
PLC在飞行模拟器中的应用主要集中在控制系统和信号处理方面。
在飞行模拟器的控制系统中,PLC可以监测和控制模拟飞行器的各个部件,如操纵杆、踏板和按钮等。
通过PLC的编程控制,飞行模拟器可以模拟各种飞行状态和情景,使飞行员能够进行真实的飞行训练。
在信号处理方面,PLC可以对模拟飞行器的传感器数据进行采集和处理。
通过PLC的编程控制,可以模拟各种飞行条件下传感器的输出,以验证飞机的可靠性和性能。
三、地面设备控制除了飞机本身,航空航天行业中的地面设备也需要高度自动化的控制系统来提高工作效率和安全性。
PLC被广泛应用于地面设备的控制和管理中。
例如,在飞机维修车间中,PLC可以用于控制各种操作设备,如起重机、传送带和机械手臂等。
通过PLC的编程控制,维修人员可以安全高效地进行飞机维修和部件更换等操作。
此外,在机场的行李输送系统中,PLC可以监控行李的进出、排序和分配等过程,确保行李能够准确送达旅客目的地,提高机场的效率和旅客的满意度。
综上所述,PLC在航空航天行业中具有广泛的应用。
它可以实现航空工控系统的自动化控制、飞行模拟器的信号处理和地面设备的高效控制,为航空航天行业的安全和效率提供有力支持。
基于PLC的自动化航空机翼制造机器人控制系统的设计
基于PLC的自动化航空机翼制造机器人控制系统的设计简介本文档旨在介绍基于PLC(可编程逻辑控制器)的自动化航空机翼制造机器人控制系统的设计方案。
该系统旨在提高机翼制造过程的自动化程度和生产效率,保证产品质量的稳定性和一致性。
系统设计该控制系统主要包括以下模块:1. PLC控制器:选用高性能的PLC控制器作为核心,用于接收和处理传感器数据并控制机器人的运动和动作。
2. 传感器模块:安装在机器人附近的传感器用于感知环境和材料状态,例如位置传感器、力传感器等。
3. 机器人执行模块:控制机械臂和其他执行器的运动和操作,实现机翼制造的各个步骤,如切割、拼接、焊接等。
4. 人机界面(HMI):提供对控制系统的可视化操作界面,使操作人员能够实时监控和调整机器人的运行状态。
5. 通讯模块:用于与其他设备或系统进行数据交换和通信,保证系统的信息互通性和协同工作。
系统工作流程该控制系统的工作流程如下:1. 启动系统:操作人员通过人机界面启动控制系统,初始化PLC控制器和相关模块。
2. 传感器数据采集:传感器模块实时采集机器人所需的各项数据,如机翼位置、材料状态等。
3. 数据处理和判断:PLC控制器接收传感器数据并进行处理,根据预设的逻辑判断执行下一步操作。
4. 机器人执行操作:根据PLC的指令,机器人执行相应的操作,如切割、拼接、焊接等。
5. 数据记录和反馈:控制系统记录执行过程中的各项数据,并实时反馈给操作人员,便于后续分析和调整。
特点和优势基于PLC的自动化航空机翼制造机器人控制系统具有以下特点和优势:1. 高度自动化:系统整合了PLC、传感器和机器人执行模块,实现了自动化的机翼制造过程。
2. 灵活可调:通过调整PLC的逻辑和指令,可以灵活应对不同机翼制造需求和工艺变化。
3. 提高生产效率:自动化系统能够高效地完成各项操作,大幅提高机翼制造的生产效率和产能。
4. 提高产品质量:通过减少人为操作和提高操作精度,系统能够保证机翼产品的质量稳定性和一致性。
某小型无人机安全起降系统设计
link appraisement
张 琨 薛亚洲
中国飞行试验研究院
张琨,男,助理工程师,硕士研究生,研究方向为机载测试产品研发;薛亚洲,男,
助理工程师,硕士研究生,研究方向为机载测试产品研发;罗霄,男,工程师,本科,
研究方向为机载测试产品研发。
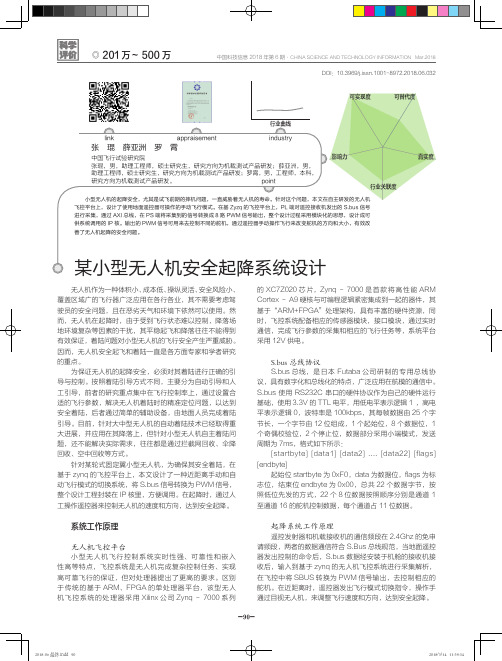
小型无人机的起降安全,尤其是试飞前期的摔机问题,一直威胁着无人机的寿命。
针对这个问题,本文在自主研发的无人机飞控平台上,设计了使用地面遥控器可操作的手动飞行模式。
在基
进行采集,通过AXI总线,在
2 IP核模块设计
5 系统工程组成框图
6 PWM信号输出验证
输出结果
将遥控器接收机的输出信号连接至飞控硬件平台,通过示波器来观察输出的PWM信号,如图6所示,周期为18.04ms,幅值为3.16V。
通过控制遥控器操作杆满量程运
在示波器上可观测到占空比的时间在1.084至1.848ms 之内,中间值为1.48ms。
在起飞时,飞行模式为手动操作飞行,待起飞平稳后,由遥控器切换为自动飞行;降落时,飞行模式从自动切换为手动,确保安全降落。
同时,在近距离视距飞行测试时,可任意切换飞行模式,以达到安全验证飞行参数的目的。
结束语
本文设计了一个小型无人机飞行模式切换系统,在起降阶段,地面遥控器发出的信号经飞控上的接收机接收后,由Zynq平台的PL端对S.bus信号采集,通过对AXI总线将数据读取到PS端,在PS端对读取的有效数据进行解析,使其满足PWM信号的输出特征,并整个程序封装成vivado IP核,方便工程调用。
8路PWM输出信号可用来控制不同的舵机和飞行模式切换,通过人工操作,来达到无人。
基于FX2NPLC控制的飞机起落架作动筒液压测试系统
基于FX2NPLC控制的飞机起落架作动筒液压测试系统
王占杰;杨后川;杜晓伟;王春净
【期刊名称】《机电工程技术》
【年(卷),期】2011(040)009
【摘要】在分析了某型飞机起落架收放作动筒液压测试系统的原理基础上,根据其加载力跨距大和加载精度高的特点,采用三菱FX2N PLC对其液压控制系统进行交流和直流分开控制设计,成功地解决加载力跨距大和加载精度高的问题,测试系统具有精度离、性能稳定等优点.
【总页数】4页(P11-14)
【作者】王占杰;杨后川;杜晓伟;王春净
【作者单位】河南平高电气股份有限公司,河南平顶山 467001;空军第一航空学院,河南信阳 464000;空军第一航空学院,河南信阳 464000;空军第一航空学院,河南信阳 464000
【正文语种】中文
【中图分类】TP212.12
【相关文献】
1.基于VB6.0的飞机平尾液压作动筒位移传感器测试系统设计与开发 [J], 晏克俊;刘君;万艳江;王新年
2.基于矢量控制的航空液压泵源测试系统转速控制方案 [J], 孟文俊;沈东凯;王占林;裘丽华
3.某型飞机起落架收放作动筒试验台液压系统的设计 [J], 高昆;杨保生
4.基于FX2NPLC的T6112镗床电气控制系统智能改造 [J], 卞和营;杜豪杰
5.基于三菱FX2NPLC船舶航行灯控制系统的研发 [J], 刘一明;何琪;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的航空电机负载模拟系统设计
基于PLC的航空电机负载模拟系统设计
康朋飞;张瑜;刘鑫
【期刊名称】《无线互联科技》
【年(卷),期】2023(20)2
【摘要】随着科技的发展,航空电机能否可靠运行越来越受到航空部门的重视。
为保障航空电机安全可靠的运行,航空电机检测设备的发展就显得尤为重要。
文章以西门子公司的S7-200SMART为核心设计了航空电机负载模拟测试系统,该系统由电阻、电容、电感等负载组成,通过工控机远程控制PLC,使交流负载开关柜和直流负载开关柜产生不同的负载组合,从而模拟飞机上的各种不同的带载测试设备,以实现系统对不同形式航空电机的检测。
该系统通用性强,可以远程控制,控制界面简洁,操作方便,完全可以实现对航空电机的模拟负载测试。
【总页数】4页(P64-67)
【作者】康朋飞;张瑜;刘鑫
【作者单位】西安思源学院工学院
【正文语种】中文
【中图分类】TP311.1
【相关文献】
1.基于PLC的机载发电机试验负载控制系统
2.基于力矩电机的起重机起升电机负载模拟加载系统
3.基于PLC的航空地面液压保障装备负载试验台设计
4.基于电动
模拟负载的电机控制实验系统设计5.基于S7-1200PLC的变流器试验负载自动控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
统供 电。直接操 作触摸屏 ,可 以实现对P L C 的控 制 。相应 的监控 界面 可 以通 过状态 显示 开关 ,指示灯 , 以及 数字 显示框等显示各 个操作系统 的运 行状态 。同时也在I / O 口 配 有相应 的开 关 ,可 以通 过对 开关按 键 的操 作完 成相应
・1 1 6・ 电子世界
源 为P L C 、触摸屏 的 电源 、输入及输 出供 电 ( 注 :该起落 架刹车及 收放控制 器模块 的供 电电压为2 8 V D C )。通过
统 、起落 架收 放系 统、充气 泵 、真 空泵 以及相 应 的内部
照 明等 部分组成 。常规操作时 ,通过 外接2 2 0 V A C 为系统
【 关键词 】 无人机;P L C;刹车;收放 ;软件设计; 硬件设计
的功能 ,进而形成双余度备份 [ 1 0 ] 。
1 引 言
无人 机在 国 内和 国际得 到 了快 速发展 , 由于其具 有
灵活机动 、高时效性 、低成本、低损耗及监测能力强、覆 盖范围广等优 点,在 军事和 民用方面 的应用 日趋广泛[ 2 ] 。 地面测试设备是无人机系统的重要 组成部分 。随着 “ 无人 机 系统 ”概念 的不 断深入 和 “ 六 性 ”设 计被 广泛要 求 , 地 面测试 设备不 再是 配套 附属地位 ,已经 成为 衡量 一套
E L E C T R O N I C S WO R L D・ 技 术 交 流
基于P L C的无人 机起落架综合测试系统设计
中国航 天 空气动力技 术研 究院测控技术事业部 梁凤麒 嵇治 刚 王 丽雅 丛 晖 牛志朝
【 摘要 】 针对无人机起落架地面测试的现状 , 采用集成化设计的思想, 基于可编程控制器 ( P L C) 设计 了一套新型多功
能起 落架综合测 试 系统 。该 系统可 以通过 可视 化界 面, 实现对无人机起 落架 的刹 车测试 、收放路 径测试 以及 自动收放
测试 ,同时还具备 为起 落架轮 胎充气 ,管路抽 真空等功 能。提 高了起 落架 系统地 面测试的 集成度 和 自动化程 度 ,改善
了 目前 无 人 机 地 面测 试 的现 状 。
2 . 1 电源 系统设 计
起落 架地 面综合测 试 系统 。该系统 能够满 足无人 机起落 架系 统 的刹 车测试 、收放路径 测试 、收放疲 劳测 试 以及 轮胎充气等功能 。
由于该 设备用 于外场 测试 ,工作 环境 相对恶 劣 ,本 设 计 中针对 可 能存在 的供 电不足等情 况 ,采取 应急 电源
提 供所 需 电源 ,应 急状态 时 ,蓄 电池做 为应 急 电源 为系
蓄 电池为飞机轮胎的充气泵提供 所需1 2 V 直流 电,为刹车
管路抽真 空的真空泵所 需2 2 0 V A C 直接 由外供 电 。在应 急状态 下 ,系统采 用容量为 6 9 A h 的1 2 V 蓄 电池 为应急 电 源 ,通过逆变器将 1 2 V D C 转变为2 2 0 V A C ,从而为 整个 系 统提供所 需 的2 2 0 V A C 电源 。其 中 ,2 2 0 V A C 与逆变 器之 间采用交流接触器 隔离 。交流接触器在 外接 2 2 0 V A C 时线 包工作 ,将逆变 器隔离 ,在2 2 0 V A C 突然 断 电是 自动切换
方 案 。具体 的 电源 系 统构 架如 图2 所 示 。该 电源 系统 工 作 分为两个状态,常态情况下 由2 2 O V A C 市电提 供系统所 需电源 。通过A C - D C 模块 分别转化成2 4 V D C 、2 8 V D C 的电
2 测试系统硬件设计
本系统主要 由触摸 屏 、P L C 及三个 通讯模块 、刹 车系
应用 [ 。 ] [ 4 ] [ s j [ 6 ] 。本文针对无人机 起落 架地面测试 的需求 , 研制 了一套 基于欧姆 龙C P 1 H 系 ̄ I J P L C 和N B 7 系 列触 摸屏 的
图1无人机起落架地面测试 系统框 图
欧姆 龙 C P 1 H 系 ̄ i J P L C 结构 紧凑 、外形精美 ,维护便 捷 :具有 中断输入 功能 ,凭借 指令 的高速处 理 ,有 助 于 整个 装置 的高速化 ; 串行 通信 功能 ,可 以根 据选 项板任 意选择 2 个端 口、R s 一 2 3 2 C 、R S 一 4 8 5 ;扩 展性超 群 ,可 以 使用C P I W 系列 、c J 系 列 的单 元 。满 足本项 目对 于通信 功 能 的需求 。其中的C P 1 H — X 4 O D T - D 为 晶体 管漏型P L C ,输 入 2 4 点,输 出1 6 点 ,为本论文选 定的机 型。
无 人机 系统保 障性 的重要 部分 [ “ 。无人机 起落 架系 统是 无人机 的重要 部分 ,在无 人机地 面支撑 、滑 跑 、起 飞 以 及 降落 等过程 中扮 演重要 角色 。因此 ,研制 一套 高可靠
性 、高集成 性的起 落架 系统地面 综合测 试设 备对于 无人 机的发展具有重要的意义 [ 8 ] [ - 0 l 。 可编程控 制器 ( P L C )具有抗干扰 能力强、工作可靠 性高 、体积 小 、编 程 方便 、修改容 易等特 点 [ 3 ] ,随着 电 子技术 的发展,P L C 由原 来的简单 的逻辑控 制,逐步具备 了计 算机 控制系 统 的功 能 ,在 工业控 制 中获得 了广 泛 的