机载红外搜索跟踪系统(IRST)综述
舰载电子战技术发展综述

舰载电子战技术发展综述摘要:为了有效对抗反舰导弹威胁,大力发展舰载电子战技术就具有十分重要的意义。
舰载电子战技术主要包括舰艇隐身、电子侦察告警、雷达无源干扰与有源干扰、激光致盲与烟幕等等。
本文对此作以综述。
关键词:舰载电子对抗舰艇隐身侦察告警雷达对抗光电对抗1 前言目前,海面舰艇面临着日趋严重的反舰导弹威胁。
反舰导弹可从空中、岸上、舰上和水下不同的场合发射,其制导方式有雷达制导、红外制导、雷达/红外复合制导、电视制导、激光制导和红外成像制导等等。
装备各种不同反舰导弹的国家已有70多个,反舰导弹已发展到第四代。
为了有效对抗反舰导弹威胁,大力发展舰载电子战技术就具有十分重要的意义。
舰载电子战技术主要包括舰艇隐身、电子侦察告警、雷达无源干扰与有源干扰、激光致盲武器与烟幕等等。
本文对此作以综述。
2 舰艇隐身技术2.1 概述随着军用电子技术的迅速发展,海面舰艇面临着日趋严重的雷达与光电威胁。
各种先进的电子侦察设备,如雷达、激光测距仪、激光雷达和机载、舰载红外侦察设备等,都是极其有效的电子侦察手段;而高精度的反舰导弹,使现代化的战舰防不胜防。
现代军事技术已经达到了"目标只要被发现,就能被命中,只要被命中,就能被摧毁"的水平。
因此,要提高海上目标的生存能力,就要降低目标被探测、发现和摧毁的概率。
西方国家正在研制先进的隐身战舰,有的已经开始服役。
舰艇隐身技术包括雷达隐身和光电隐身以及声特性隐身、磁特性隐身等等。
减小舰艇的各种被探测的雷达、光电、声和磁特征,使敌方探测设备难以发现或使其探测能力降低的综合技术称为舰艇隐身技术。
2.2 舰艇的雷达隐身技术2.2.1 舰艇的雷达有源隐身技术理论上,雷达发射电磁波照射目标后,其接收机接收到的目标回波功率等于雷达照射目标的功率密度、目标的散射功率密度的大小及分布和雷达接收天线的等效接收面积等三项的乘积。
而减少这三项中的任一项,都可降低雷达所接收到的功率,从而达到隐身的目的。
战斗机IRST安装位置

MiG-29KSu-35BMF-16E“台风”“阵风”T-50 PAK FAJ-10BF-15MJ以上型号均采用上置IRST Infra-Red Search and Track 红外搜索跟踪系统。
下置IRST 的战术飞机中,F-14 为舰载型,F-35 是事实上的轰炸机,TG 有论点很可能据此宣称J-20 的IRST 不是为了对地打击任务便是为了舰载改装。
某些媒体从业者的大脑还可以再懒一点么?多数制空优先的现代化战斗机采用上置IRST,根本原因在于其超视距空战模式。
当敌机发射超视距武器后,我方战斗机将立即侧转90 度同时向低空俯冲,目的如下:1. 通过侧转90 度使敌机/空空导弹雷达无法利用多普勒频移将我方战斗机的雷达回波从背景噪声中过滤出来,导致机载射控雷达/导弹制导雷达失锁。
2. 即使对方的现代化射控/导弹制导雷达(目前大势所趋的AESA) 依靠其它信号处理手段维持锁定,侧转90 度仍可大幅度降低我机与敌导弹之间的接近速率,并迫使敌导弹转向追击我方战机,令其能量水平急剧降低,稠密大气亦将导致敌空空导弹能量迅速流失,很快成为强弩之末而无法追上剧烈机动的我军战斗机(这一招对付使用固体燃料火箭发动机,引擎熄火后惯性飞行的AIM-120 之类传统超视距武器特别有效,前提是战斗机推重比大,翼载低,完成规避机动后能迅速重新爬升占位,否则在接下来的格斗空战中必将由于能量水平不足而处境困窘)。
3. 逃入低空迫使敌机/导弹雷达以下视模式工作,背景噪声大幅度增加,锁定距离相应明显下降。
地面上的各类机动车辆,生产生活设施等热源对敌机的IRST 和红外寻的武器亦将造成不可忽视的干扰。
显然,在避开敌超视距武器,重新爬升占位的过程中,我军战斗机的IRST 将以上视状态工作,安装位置位于机首上方乃是合乎逻辑的选择。
那么,为什么F-14 的IRST 位于机首下方呢?1. F-14 的电视+ IRST 系统体积过于庞大,若安装在机首上方将严重影响飞行员视线。
全向快速IRST系统的信息处理技术
全向快速IRST系统的信息处理技术全向快速IRST系统的信息处理技术近年来,随着红外搜索跟踪系统(IRST)在军事、航空航天和安全监控等领域的广泛应用,快速、准确的信息处理技术对全向快速IRST系统的实现和性能提升起着至关重要的作用。
本文将探讨全向快速IRST系统的信息处理技术的关键问题和最新研究进展。
首先,全向快速IRST系统的信息处理技术主要包括目标检测、目标跟踪和目标识别等方面。
目标检测是IRST系统中最基础的任务,其核心是从红外图像中准确、快速地检测出目标。
在全向IRST系统中,由于全角度覆盖的特性,目标检测需要考虑多种情况下的目标表现,如各种姿态、不同光照条件和部分遮挡等。
针对这些挑战,研究者们提出了一系列创新的目标检测算法,如基于深度学习的卷积神经网络(CNN),通过大量训练样本和卷积操作实现高准确度的目标检测。
此外,一些基于特征提取和匹配的方法也取得了不错的效果,如利用Haar特征、SIFT特征和SURF特征等。
其次,目标跟踪是全向快速IRST系统中的关键任务之一。
目标跟踪需要在不同序列帧之间,追踪目标的位置、姿态和速度等信息。
然而,在全向IRST系统中,由于四周环境的多样性和复杂性,目标跟踪面临许多挑战,如背景干扰、目标遮挡和光照变化等。
为了克服这些困难,研究者们提出了各种跟踪算法,如基于模型的方法、基于特征的方法和基于卷积神经网络的方法等。
其中,基于模型的方法通过预先建立目标模型和背景模型,实现目标跟踪。
而基于特征的方法则通过提取目标的特征信息,如颜色、纹理和运动等,进行跟踪。
另外,基于卷积神经网络的方法则通过学习大量的样本和目标的运动轨迹,实现精确的目标跟踪。
最后,目标识别是全向快速IRST系统中的重要任务之一。
目标识别旨在从目标跟踪中提取更具语义性的信息,并将其与数据库中的目标进行匹配,实现目标的自动识别。
在全向IRST系统中,目标识别需要考虑目标在不同角度、不同光照条件和尺度变化下的变化。
机载红外搜索跟踪系统(IRST)综述

I RST 系统9特别是早期的第一代I RST9严格的讲
不是成像系统o一般采用工作在3 !5 "m 的中波器件探 测目标辐射o由于空中背景相对地面背景来说比较简单9
1 )抗干扰\抗隐身能力强9隐蔽性好o
可以把目标作为热点与背景分开9对目标进行搜索和跟
现代各种类型的作战飞机都把发展机载电子战技 踪sFLI R 传感器大都采用工作波长在8 !14 "m 的长波器 术和隐身技术放在突出位置9采用有源探测方式的机 件9探测目标和地面背景的温差成像o飞行员通过图像完
国外战斗机主要I RST 应用情况见附表1 9下面就 国外典型机载I RST 作一介绍G
表1 "国外典型机载红外搜索跟踪系统情况""Tab1e 1 "Typica1 I RST abrOad
型号名称
工作波段及 制造厂商
探测部位
搜索范围
探测距离
配装机种
用途
美国休斯 方位 65
AN AWG-9 3 .5 !4 .8 "m
3 "机载I RST 的发展历程与装备现状
3 .1 "机载I RST 系统的发展历程 机载I RST 的研制始于上世纪50 年代9成熟于80
14
年代9在80 年代末90 年代初大量装机使用o从系统 水平及所采用的技术来看9机载I RST 的发展可大致 划分为3 个阶段:
五六十年代的发展可以归纳为第一阶段o世界上 第一个机载I RST 系统是美国在50 年代中期为F-104 飞机研制的o系统采用单元硫化铅 (PbS )为光敏元 件9只能接受发动机尾喷口的红外辐射o由于探测距 离近9很快就随 F-104 飞机一起退役o在60 年代9美 国麦克 唐纳公司(Mc DOnna1 )为美国海军 F-4B 飞 机研制的 R1137/AAA-4 型 机 载 红 外 搜 索 跟 踪 系 统 (I RSTS)堪称这一阶段的代表o系统安装在机头下 方9工作波段3 !4 .5 "m9系统采用两个光伏型单元锑 化铟 (I nSb )器件9一个矩形探测器用于目标搜索9一 个圆形探测器用于目标跟踪9对发动机尾喷口探测距 离大于30 k m9对高空高速目标具有全方位探测能力o
怎样发现隐形战机?

怎样发现隐形战机?怎样发现隐形战机?欢迎进入阿劳博客《十万个怎样》,是一个帮助您解决问题的百科博客。
内容来源于网络,仅供网友们参考。
由于事物的发展往往会出现不断的更新和变化,文章中有可能会出现不准确的地方,还有待不断的完善。
如果您有什么意见,可以在我的博客下方留言。
博客尾部的相关联文章可能会给您带来一定的帮助,并引入另外一个内部链接区里,最终找到您想知道的问题答案。
下面就对关于怎样发现隐形战机的问题进行解答。
1、超视距雷达(网络综合资料)超视距雷达就是利用电磁波在电离层与地面之间的反射或电磁波在地球表面的绕射探测地平线以下目标的雷达,又称超地平线雷达。
超视距雷达有两种基本类型:利用电离层对短波的反射效应使电波传播到远方的雷达,称为天波超视距雷达;利用长波、中波和短波在地球表面的绕射效应使电波沿曲线传播的雷达,称为地波超视距雷达。
天波超视距雷达的作用距离为1000~4000公里。
地波超视距雷达的作用距离较短,但它能监视天波超视距雷达不能覆盖的区域。
超视距雷达工作在P波段(米波),工作波长为10~60米,飞机等隐身武器系统主要对抗频率为0.2~29GHz的厘米波雷达,对米波几乎没有作用。
当雷达波束的波长接近于飞机的构件尺寸时,这些构件就像天线一样,开始吸收并反射无线电波。
当雷达波长达到“天线”尺寸的两倍时,其效果更佳。
隐身飞机的尺寸与超视距雷达的波长相近,因此很容易被这种雷达发现。
同时,天波雷达的雷达波是经过电离层反射后从上方照射到飞行器上的,因此它是探测隐身武器的有力工具。
国外试验表明,超视距雷达可以发现2800千米外、飞行高度150~7500米、雷达反射截面为0.1~0.3平方米的目标。
采用了相控阵技术的超视距雷达,能在1500公里处探测到像-2隐身轰炸机这样的目标。
超视距雷达在使用上也存在不少问题,例如只能获得目标的方位和距离信息,很难获得仰角信息;测量精度低、分辨率差;电波通道不稳定,干扰因素多,气候变化、北极光和太阳黑子直接影响天波超视距雷达的性能,甚至使它不能正常工作;在中波、短波波段,频谱拥挤,带宽窄,互相干扰严重。
红外探测与追踪的双机被动定位模型

红外探测与追踪的双机被动定位模型郝振兴;罗继勋;胡朝晖;李文超【摘要】针对机载红外探测与追踪(IRST)被动定位的精度低和解算速度慢及多机间信息大容量实时传输问题,提出了两种应用激光数据链传输信息的 IRST 双机被动定位模型。
模型均基于测向交叉定位原理构建,模型一的基线距离已知,两机坐标未知;模型二的两机坐标已知,基线距离未知;并对比了两种模型的特性。
仿真表明,测角误差减小,两机距离增大,会提高定位精度;模型二的计算速度优于模型一,但目标高度大于1 km时,模型二失效;双机与目标构成等腰三角形且两载机的交角为110°时,定位的精度最高。
%For the problem of low accuracy,settlement calculation speed and large capacity information real-time transmission of airborne infrared search and track (IRST)among multiple machine problem,two application la-ser data link transmission information of IRST passive positioning of two models were put forward.The models were built on the basis of the principle of direction of arrival location,a baseline distance was known and aircraft coordinates unknown.Simulation results showed that the measuring angle error was reduced,the positioning ac-curacy was improved when the two machine distance increased;the computing speed of model two was better than model one,but,when the target height was greater than 1 km,model two failed;when two aircrafts and target forming a isosceles triangle and the two aircraft crossing angle was 1 10 °,the highest accuracy was gained.【期刊名称】《探测与控制学报》【年(卷),期】2016(038)001【总页数】5页(P28-32)【关键词】激光数据链;机载红外探测与追踪;测向交叉定位;几何精度因子【作者】郝振兴;罗继勋;胡朝晖;李文超【作者单位】空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;解放军 95896 部队,河北沧州 061736【正文语种】中文【中图分类】V271.4被动(无源)探测定位系统利用目标辐射源的辐射信息探测目标并确定出目标位置,具有作用距离远、隐蔽性能好等优点,在现代信息化战争中有着广泛的应用前景[1]。
机载红外搜索跟踪系统探测性能评测标定
机载红外搜索跟踪系统探测性能评测标定王领;于雷;寇添;王海晏【期刊名称】《国防科技大学学报》【年(卷),期】2015(000)005【摘要】针对机载红外搜索跟踪系统(Infrared Search and Track,IRST)理论与实际战场探测能力之间的较大差异,提出了 IRST 系统探测性能评定的方法。
对机载红外探测系统探测性能指标进行理论分析,选取探测点源目标的噪声等效辐照度作用距离模型进行分析改进;探讨作用距离与探测概率之间的关系;根据 IRST系统工作方式,推导出系统物理扫描概率和目标发现概率计算公式;分析目标发现概率与系统作用距离以及载机速度之间的关系;搭建双余度反馈 IRST 系统探测概率测试平台,制定实验评测步骤,提出一种对探测系统性能进行评估的方法,该方法简单可靠。
仿真实验结果表明,满足一定的探测概率下,系统作用距离极限可达到60km;通过半实物仿真平台的测试,实验结果较好地验证了所建模型的合理性。
【总页数】7页(P192-198)【作者】王领;于雷;寇添;王海晏【作者单位】空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038;空军工程大学航空航天工程学院,陕西西安 710038【正文语种】中文【中图分类】TN929【相关文献】1.一种机载红外搜索跟踪系统多目标跟踪精度测试系统设计 [J], 杨旭;何江宁;陈洪亮;李莉2.机载红外搜索跟踪系统有效探测区域研究 [J], 王芳;罗寰;王海晏;寇添;寇人可3.新一代机载红外搜索跟踪系统技术发展分析 [J], 杨百剑;万欣4.机载视觉探测与目标定位系统设计与实现 [J], 张炳亮;王彪;徐锦法5.机载红外搜索跟踪系统仿真测试平台设计 [J], 李洁;孙科峰因版权原因,仅展示原文概要,查看原文内容请购买。
红外探测技术的进展_应用及发展趋势

红外探测技术的进展、应用及发展趋势葛文奇(中国科学院长春光学精密机械与物理研究所,吉林长春130033)【摘要】简要介绍了红外技术的发展历史、成像原理及红外器件,并对制冷技术、红外光学系统、前视红外(FLIR)及红外搜索跟踪系统(IRST)、红外隐身与对抗技术和数据融合技术做了概述,对红外器件、IRST及其未来发展趋势进行了综述。
关键词:红外器件;制冷技术;光学系统;搜索跟踪系统(IRST);发展趋势中图分类号:TN215CurrentStatusandDevelopmentTrendsofOpticalFiberCommunicationTechnologyGeWen-qi(ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofScience,Changchun130033,China)Abstract:Thedevelopinghistoryofinfraredtechnolopy,imageryprincipleandinfraredcomponentsaredescribed.Coolingtechnology,infraredopticalsystem,FLIR,IRST,Infraredstealthandcountermeasuretechnology,datafusiontechnologyarealsointroduced.Finally,thedevelopingtrendofinfraredcomponentsandIRSTarereviewed.Keywords:infraredcomponent;coolingtechnology;opticalsystem;IRST;developingtrend1引言红外技术在军事应用的牵引和推动下,得到快速发展。
红外系统有如下4方面优点:1.环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;2.被动式工作,隐蔽性好,不易被干扰;3.靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装目标的能力优于可见光;4.红外系统的体积小、质量轻、功耗低。
【Infra-redsearchandtracksystem】漫谈红外搜索和跟踪系统(IRS...
【Infra-redsearchandtracksystem】漫谈红外搜索和跟踪系统(IRS...编前语:闲扯之前,先更正一下昨日因偷懒而在发布中出现的错误:1、题图是搭载“爱立眼”系统的萨博2000预警机,而非文中主讲的“全球眼”预警机;2、最后的图注也是,应为“Erieye很帅的天使之翼”。
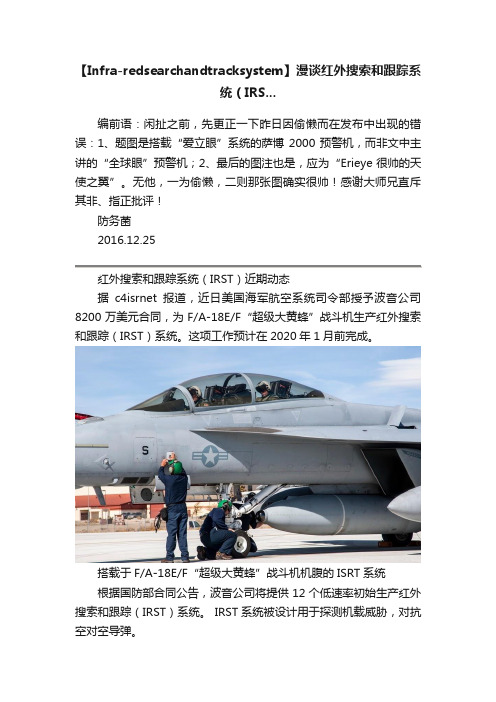
无他,一为偷懒,二则那张图确实很帅!感谢大师兄直斥其非、指正批评!防务菌2016.12.25红外搜索和跟踪系统(IRST)近期动态据c4isrnet报道,近日美国海军航空系统司令部授予波音公司8200万美元合同,为F/A-18E/F“超级大黄蜂”战斗机生产红外搜索和跟踪(IRST)系统。
这项工作预计在2020年1月前完成。
搭载于F/A-18E/F“超级大黄蜂”战斗机机腹的ISRT系统根据国防部合同公告,波音公司将提供12个低速率初始生产红外搜索和跟踪(IRST)系统。
IRST系统被设计用于探测机载威胁,对抗空对空导弹。
波音公司将提供12个低速率初始生产红外搜索和跟踪(IRST)系统装备于F/A-18E/F“超级大黄蜂”战斗机的红外搜索和跟踪系统(IRST)是一种被动、远距离传感器,可搜索和探测红外辐射,可同时跟踪多个目标,并提供高效空对空目标捕获能力。
搭载于ISRT系统的F/A-18E/F“超级大黄蜂”战斗机进行试飞该系统可使用户探测先进的威胁目标,即使对手装备了雷达干扰技术。
IRST可提供“先发现、先打击”能力,与飞机雷达协同工作,增强各种武器系统的性能。
主\被动探测与数据链工作模式2011年11月,波音公司就与美国海军签订了一份1.35亿美元的合同,设计并生产F/A-18E/F“超级大黄蜂”战斗机的红外搜索和跟踪系统。
按照当时的计划,红外搜索和跟踪系统将在2016年具备“初始作战能力”。
IRST系统探测头组件该合同的子合同承包商包括洛克希德·马丁公司、通用电气航空公司、Meggitt防御系统公司等。
美国F-22“猛禽”战斗机综合化航空电子系统概述

该雷达包括5个主要部件:相控阵/波束控制器、含24个电路模块的雷达支持电子组件、含5个电路模块的射频接收机、含3个电路模块的相控阵电源和安装支架。
雷达计算机软件由4部分组成:雷达处理和管理软件,提供顶层雷达工作方式的控制和管理;雷达支持电子控制程序,提供接收机构形和校准;相控阵电源控制程序,提供对电源工作的监控和管理;波束控制器控制程序,实现对波束指向的计算。
F-22“猛禽”战斗机是根据美国空军“全球作战、全球到达,全球力量”的战略思想而设计的,要求它能在未来空空、空地战场环境中夺取空中优势,应是美国空军夺取制空权的主力战斗机,将取代F-15战斗机。该战斗机的主要特点如下:
(4)座舱采来“一平六下”显示体制,所有作战信息通过平显和多功能显示器显示,为飞行员提供关键的飞行及作战信息,显著降低了飞行员的工作负担;
(5)通过机内自检(BIT)和系统重构,使系统具有容错能力,提高了系统的可靠性和可维修性。
五、F-22战斗机航空电子系统的主要设备
F-22飞机航空电子系统的主要设备包括雷达、红外搜索与跟踪(IRST)(未来发展项目)、电子战、通信导航识别、2个通用综合处理器、控制和显示装置、惯性基准系统及外挂管理系统。
1.通信/导航/识别系统
5.具有隐身能力
F-22的武器都装在机身里,使用时才打开武器舱门,这使机身下部很平坦,从而减少了雷达波的反射,同时还采用了能减少雷达反射截面的复合材料和灰色隐身涂料,其雷达反射截面积只有F-15的几十分之一,从而在进行空战时可以先敌发现、先敌攻击,大大增强作战的突然性、隐蔽性,提高作战效能。
美国洛克希德·马丁公司研制的F-22“猛禽”战斗机是于21世纪初开始服役的第四代战斗机的典型代表,被誉为21世纪的主力战斗机,该机先进的航空电子系统是完成各种作战任务的关键。本文将对其技战术特点等方面进行论述,并提出相关发展建议。
防恐火炮随动系统设计
防恐火炮随动系统设计文献阅读综述1项目背景“9·11”以来,各类恐怖活动,特别是以“基地”组织为核心的国际恐怖势力的恐怖袭击出现一些新的变化与特点,无论是从恐怖活动的规模上、频率上、还是组织策划、技术手段上都远非传统恐怖活动相比拟。
2009年4月30日,美国国务院向国会提交了《2008年度国家反恐报告》。
根据报告统计,2008年全球共发生11770起恐怖袭击事件,比2007年减少18%,死亡15765人,比2007年减少30%。
约40%的恐怖袭击发生在中东地区,南亚(包括巴基斯坦和阿富汗)是35%。
根据美国国家反恐中心“世界恐怖事件跟踪系统”的最新统计,2009年全球发生了10999起恐怖事件,死亡14971人。
防恐反恐涉及到方方面面,除必要的人力资源外,科技在应对恐怖主义中的作用越来越重要。
科技在反恐中应用及水平不断提高,既可提高反恐效率,也可突破一些反恐难点,既可提高许多防恐措施的层次,也可成为安保经济的一个增长亮点。
世界许多国家都高度重视反恐的科技投入,并积极探索多种科技反恐的方式与手段。
因此,各国在加强方方面面反恐措施的同时,更加注重反恐高科技手段。
项目以浙江先锋机械有限公司的技术需求为背景,该公司是生产枪械和警用装备的军工企业,位于长三角的浙江省桐乡市,地理环境优越,交通便利。
公司占地面积10万平方米,总资产1.5亿元,现有职工400余人。
公司拥有较为完善的加工设备和检测手段,具有武器装备科研生产许可证和武器装备承制单位资格认证、公安单警装备生产入围企业等资质。
通过了国军标GJB9001A-2000质量体系认证,是国家二级保密资格单位、高新技术企业,拥有省级研发中心。
公司目前除了生产军用装备外,还研制生产反恐防暴装备。
主要有:18.4毫米防暴枪、35毫米防暴榴弹发射器、警用制式刀具和各类多功能匕首、隔离网路障、防暴隔离墙等,分别装备于公安、武警部队。
公司将一如既往地在现有反恐防暴装备的基础上作进一步的拓展和深度开发,满足我公安、武警部队在维护社会治安和反恐防暴特殊环境下的需求,为反恐防暴装备现代化作出应有的贡献。
俄罗斯苏-35S_战斗机解析
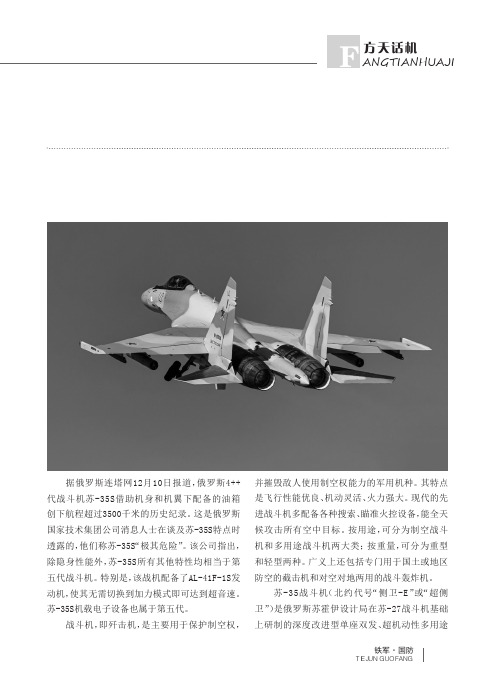
方天话机ANGTIANHUAJI35铁军·国防TIEJUN GUOFANG俄罗斯苏-35S战斗机解析据俄罗斯连塔网12月10日报道,俄罗斯4++代战斗机苏-35S借助机身和机翼下配备的油箱创下航程超过3500千米的历史纪录。
这是俄罗斯国家技术集团公司消息人士在谈及苏-35S特点时透露的,他们称苏-35S “极其危险”。
该公司指出,除隐身性能外,苏-35S所有其他特性均相当于第五代战斗机。
特别是,该战机配备了AL-41F-1S发动机,使其无需切换到加力模式即可达到超音速。
苏-35S机载电子设备也属于第五代。
战斗机,即歼击机,是主要用于保护制空权,并摧毁敌人使用制空权能力的军用机种。
其特点是飞行性能优良、机动灵活、火力强大。
现代的先进战斗机多配备各种搜索、瞄准火控设备,能全天候攻击所有空中目标。
按用途,可分为制空战斗机和多用途战斗机两大类;按重量,可分为重型和轻型两种。
广义上还包括专门用于国土或地区防空的截击机和对空对地两用的战斗轰炸机。
苏-35战斗机(北约代号“侧卫-E”或“超侧卫”)是俄罗斯苏霍伊设计局在苏-27战斗机基础上研制的深度改进型单座双发、超机动性多用途文/宗 和方天话机ANGTIANHUAJI36铁军·国防TIEJUN GUOFANG战斗机,第四代半战斗机。
2014年,该机机长22.18米,翼面积62平方米,飞行速度2500千米/小时,大航程3600千米,荷8000千克。
动性能和高机动性。
性。
还采用大量的复合材料,高了机动性能。
在动力系统上,发动机,采用矢量喷口技术,能够进行极限机动,加速性能。
在雷达系统上,IRST (红外搜索与跟踪系统),多目标攻击能力,并攻击目标。
进的电子战系统,器和红外干扰系统,具有自动保护功能,干扰和防御措施。
装备了多种类型的空对空导弹,R-77等,打击。
其中,中距空对空导弹,击方面,如Kh-29、Kh-31和Kh-59等。
击、对海攻击方面,和Kh-41等,。
我国空军装备的红外搜索与跟踪系系统
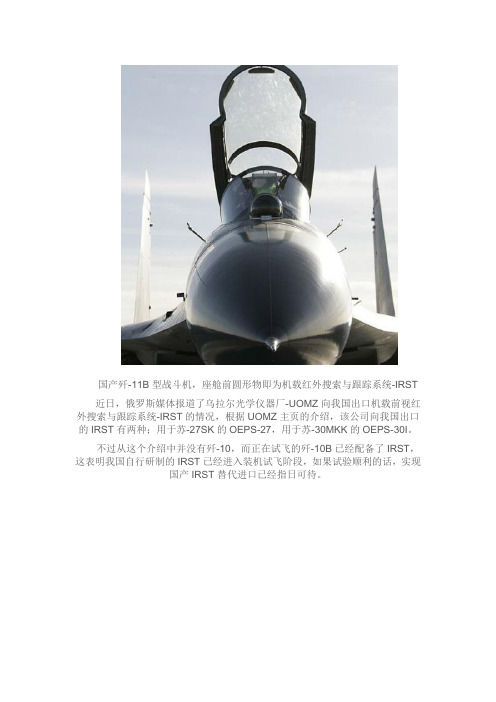
国产歼-11B型战斗机,座舱前圆形物即为机载红外搜索与跟踪系统-IRST近日,俄罗斯媒体报道了乌拉尔光学仪器厂-UOMZ向我国出口机载前视红外搜索与跟踪系统-IRST的情况,根据UOMZ主页的介绍,该公司向我国出口的IRST有两种;用于苏-27SK的OEPS-27,用于苏-30MKK的OEPS-30I。
不过从这个介绍中并没有歼-10,而正在试飞的歼-10B已经配备了IRST,这表明我国自行研制的IRST已经进入装机试飞阶段,如果试验顺利的话,实现国产IRST替代进口已经指日可待。
歼-10B已经配备国产IRST我们知道现代作战飞机的主要探测系统是机载火控雷达,现代机载火控雷达具备可以全天候工作、探测距离远、可以多目标跟踪与攻击等优点,但其缺点就是需要主动发射电波,在电子战日益激烈的现代空战中容易暴露自己,同时系统体积和重量都偏大,特别是隐身飞机的出现,也让雷达的实际探测效果大打折扣,因此作战飞机需要新的探测手段,以做为雷达的补充,所以IRST就出现了,从该系统的名称就可以看出其是采用红外探测原理,利用目标与背影的温差来探测目标,与机载雷达相比,机载IRST最大的优点就是不发射电波,隐蔽性强,抗电磁干扰能力好,特别是对抗隐身飞机时有巨大的优势,因为当隐身飞机飞行时其机身蒙皮会与空气磨擦生热,速成越快,温度越高,因此IRST的探测距离就越远,另外其工作波长短,系统功耗、体积和重量较小,可靠性较高,成本低,是各国重点发展的一项探测技术,机载红外探测系统除了IRST还有机载前视红外搜索系统(FLIR),两者的区别主要是IRST主要用于对空中目标的探测,其器件工作在中波,而FLIR主要用于对地面目标的探测,器件工作在长波,当然红外探测系统也不是完美无缺,其缺点就是探测距离较近,尤其是目标处于迎头探测时,目前性能较好的IRST的这个指标也不过在100公里左右,而普通机载雷达就超过了这个指标,另外就是其不能直接测量目标的距离,仍旧需要雷达或者激光测距仪来辅助,因此用于火控或者制导的时候仍旧会暴露平台的位置,另外就是受自然环境干扰较大,特别是太阳直视时、不良气候条件下的作用距离仍旧偏低。
隐身飞机的隐身原理

隐身飞机的隐身原理班号:1105102学号:**********姓名:***摘要:隐身——我们似乎并不陌生,在很多神话和传说中,人类都流露了自己隐身的梦想。
很早以前人们一直在想这个办法,所谓明眼人打瞎子,一直都在想把自己隐藏起来,让敌人暴露在自己的目光下。
本文介绍了隐身飞机的隐身原理,并且对未来的隐身技术作了简要的介绍。
关键词:隐身飞机 隐身技术 吸波材料1、隐身飞机简述及现状隐身飞机的最大特点是能降低飞机在航行过程中的目标特性,以提高它的突防能力和攻击能力。
在世界范围的近几次的局部战争中,以美国为首的西方发达国家,依靠隐身飞机对其敌国频频发动袭击,几乎次次得手,取得了惊人的作战效果。
隐身飞机逐渐成为出其不意、克敌制胜的法宝。
隐身飞机的出现是对各种防空探测系统和防空武器系统的严峻挑战,也是电子战领域的一大突破,必将对军用航空装备和空中作战方式产生重大影响,因此,美国称其为“竞争战略”的基本要素。
隐身飞机是一种敌方利用常规防空探测设备难以探测到目标的电磁特征和飞行轨迹的飞机。
飞机隐身有六大要素:雷达、红外、视觉、噪音、烟雾、凝迹。
国外隐身技术的研究始于第二次世界大战期间,起源于德国,发展于美国,并扩展到英国、法国、俄罗斯及日本等发达国家。
目前美国的隐身飞机处于国际领先地位,俄、德、法、英、瑞典、加拿大、日本等国家对隐身飞机的研究也在紧锣密鼓地进行着。
为获得良好的隐身效果,设计制造隐身飞机时所采取的具体措施是:(1)设计出独特的气动外形;(2)采用能够吸收雷达波的复合材料和涂料;(3)采用有源或无源电子干扰;(4)采用屏蔽技术降低飞机的红外辐射。
从原理上来说,隐形飞机的隐形并不是让我们的肉眼都看不到,它的目的是让雷达无法侦察到飞机的存在。
隐形飞机在现阶段能够尽量减少或者消除雷达接收到的有用信号,虽然是最为秘密的军事机密之一,隐形技术已经受到了全世界的极大关注。
2、隐身飞机的隐身原理由于现代防空体系中最为重要使用最广发展最快的探测器是雷达,因此,雷达隐身技术成为最主要的隐身技术。
黄蜂之眼-FA-18新吊舱

作为机载火控雷达的补充,光电传感器系统为现代战斗机提供了一种超视距的被动探测手段,飞行员可以关闭机载雷达,选择使用光电传感器进行探测,以增强战斗机的射频隐身能力。
另外,光电传感器还可提高现代战斗机的战场态势感知能力和全天候作战能力。
因此,美国海军为F/A-18系列战斗机配备了多种光电传感器系统吊舱,以提升其对地和对空作战能力。
提升对地攻击能力的ATF LlR吊舱AN/ASQ-228先进瞄准前视红外系统(ATFLIR)吊舱由美国海军委托雷声公司空间和机载系统部负责研制,它是世界上第一种第三代前视红外瞄准系统,用来装备F/A-18C/D“大黄蜂”和F/A-18El F”超级大黄蜂”战斗机。
ATFLIR吊舱功能强大,可取代原来F/A-18C!Dl上装备的三种老式吊舱:AN/AAS-38,AN/AAS-46瞄准前视红外(TFLIR)吊舱和AN/AAR-55导航前视红外{NAVFLIR)吊舱。
ATFLIR吊舱以半埋的方式挂载于F/A-18系列战斗机左侧进气道下方的挂架上。
ATFLIR吊舱可引导投放联合防区外弹药(JSOM)、联合直接攻击弹药(JDAM)和“宝石路”系列激光制导炸弹等多种精确对地打击武器弹药,并具有执行空中监视,近距支援、低空全天候导航以及轰炸效果评估等任务的能力,从而大幅度地提升了F/A-18系列战斗机的对地精确攻击能力和全天候突防能力。
雷声公司已于2006年6月在ATFLIR吊舱上增加了Ku波段数据链功能,从而使得该吊舱可向地面控制站传输高分辨率光电视频图像。
ATFLIR吊舱于2003年9月份具备初始作战能力(IOC),截至2008年,美国海军证实,ATFLIR吊舱在FIA-18系列战机上的使用时间已经超过了10万飞行小时,并参与了伊拉克战争,美海军总共计划购买574套ATFLIR吊舱装备F/A-18系列战斗机。
提升空战能力的新型lRST系统由于电子干扰技术的进步,战斗机的雷达系统可能在严酷的电子战环境中失效,尽管美国军方过去一直在对F/A-18系列战斗机的雷达系统进行性能升级,而且雷声公司提供的最新型APG-79有源相控阵雷达(AESA)具有很强的抗干扰能力,但是美国海军仍然对X波段雷达电子对抗系统的扩散表示担忧,这种电子对抗系统可以降低美军战斗机雷达的作战效能。
基于红外辐射信息的IRST系统机动目标跟踪算法
第 26 卷 第 3 期 2004 年 5 月
4 仿真分析
1)仿真场景设计 为了客观地评价本算法的性能,我们用飞机的转弯状态方程[9]产生目标的机动航迹,不失一般性,这里认 为目标在固定高度上做平行于水平面的机动飞行,目标的运动航迹设置如下:目标的起始位置为[14 km,2 km, 5 km] ,初始速度为[-100 m/s,0,0],扫描周期 T= 0.1 s。在第 1 到 300 个扫描周期内作匀速飞行;之后作右 转弯运动,转弯速率为 3°/s,持续时间为 301 到 600 个扫描周期;在第 601 到 900 个扫描周期内作匀速飞行; 最后作右转弯运动,转弯速率为 3°/s,持续时间为 901 到 1200 个扫描周期,在 XY 平面内的飞行航迹如图 1 所 示。 从分析过程可以看出,目标的红外光谱辐射强度 J 的变化对跟踪精度有很大的影响,为了对这一影响有一 个直观的认识,在此对 J 作两种类型的仿真,一种为 J 保持恒定的值(J=500 W/sr) ;另一种是 J 随着目标的运 动而变化,其变化过程为在 1 到 300 个扫描周期为 500 W/sr,在 301 到 500 个扫描周期以-5 W/(sr﹒s)速率递 减,在 501 到 600 个扫描周期以 8 W/(sr﹒s)速率递增,在 601 到 900 个扫描周期保持恒定,在 901 到 1200 个扫 描周期以-1 W/(sr﹒s)速率递减。 2)参数设置 设 IRST 系统的方位角和俯仰角的测量误差均方差σα=σβ=0.1 mrad, 目标红外光谱辐射功率的测量误差均方 -7 -1 差σPI=1.0×10 W,大气衰减系数µ=0.8 km ,采样间隔 T 内加速度增量的过程噪声均方差为 10 m/s2。对于目 标的红外光谱辐射强度,在两种仿真场景下均设 J=500 W/sr。初始协方差矩阵 P0= diag( 10-6[100,25,0,100,25,0, 100,25,0] ),初始状态 X0=[14km,0,0,2km,0,0,5km,0,0]。 3)结果分析 在上述条件下,对飞行过程进行了 100 次 monte carlo 仿真实验,结果如图 2、3、4 所示。 39
红外搜索跟踪系统 (1)

红外搜索跟踪系统摘要: 首先指出红外搜索跟踪系统的在军事应用的优势和意义,介绍了红外搜索跟踪系统的主要组成部分及工作原理,然后对近年来研制的红外搜索跟踪系统进行了综述,并对系统的发展趋势进行了展望。
关键词: 红外搜索跟踪系统; 组成; 原理; 现状及发展趋势前言:红外搜索与跟踪(IRST)系统是基于红外特征全景监视设备,能够探测和跟踪低高度空中和水面威胁目标,如入侵的反舰导弹,当雷达性能下降时成为一种重要的雷达辅助设备。
IRST系统对近程监视、舰船识别、海岸成像和夜间导航都发挥很好的作用。
红外搜索系统的总体1.1红外搜索跟踪系统组成红外搜索跟踪系统一般由红外扫描头(红外传感器和扫描单元),信号处理装置,稳定平台,测角系统,导航单元,电源单元,随动伺服系统和显控台等组成。
1.1.1红外扫描头红外扫描头安装在稳定平台上,一般都装载坦克,装甲车,舰艇及飞机的外部,以接受目标的红外辐射,在俯仰位伺服单元和方位伺服单元的驱动下,实现在不同俯仰角上的连续回转水平扫描。
1.1.2信号处理装置信号处理装置通常包括实时处理和便扫描边跟踪两部分。
边扫描边跟踪红外扫描头传来的目标数据,完成目标提取,产生跟踪目标,将数据传输到武器系统。
同时对跟踪目标进行识别和相关处理。
1.1.3稳定平台稳定平台的主要作用是敏感并消除,隔离承载体的摇摆,晃动,使承载的红外扫描头稳定在地理水平面。
1.2系统工作原理红外系统中,红外传感器起着关键作用,能将红外光谱区物体的亮度分布转化为可见光的亮度分布,并显示在显示屏上,便于观测和识别。
红外搜索系统的一般工作原理是将来自目标和背景的红外辐射通过红外光学成像系统聚集于红外探测器,探测器将目标和背景的红外辐射转化成电信号。
该信号输入预处理电路,经过放大后被提供到信号处理装置,经过相关技术处理,筛选确定出目标,并对真实的目标进行威胁判断,计算目标位置,然后将目标的相关数据传输给武器系统,对目标进行拦截。
红外系统文献综述

毕业设计(论文)文献综述毕业设计(论文)题目:8路红外遥控开关控制器文献综述题目:文献资料(一)基于单片机控制的多路红外遥控开关参考文献资料:文献资料(一)基于单片机控制的多路红外遥控开关西安工程科技学院学报第19卷第4期1.总体方案设计系统组成如图1所示。
系统由发射部分和接收部分组成。
发射部分采用脉冲个数编码,将待发射信号调制成56.7kHz的波信号,由红外发射管进行发射。
接收部分由红外接收管进行解码接收,单片机通过对所接收信号的分析,输出相应的控制信号,使继电器原有状态发生改变,并由LED数码管指示出发射部分按下的按键号。
图1 红外遥控开关系统组成2.系统硬件设计发射部分的电路原理图如图2所示,图2中AT89C52单片机为控制核心;P0口作为键扫描端口;第14脚作为红外遥控发射编码的输出脚,用于输出56.7kHz的载波编码信号。
该注意的是单片机的P0口必须外接上拉电阻,否则发射部分将无法正常工作。
图2 发射部分电路原理图接收部分的电路原理图如图3所示。
图中AT89C52单片机为控制核心;.P1.0~P1.3口作为数码管的二进制数据输出,经过4511译码器译码后通过半导体数码管显示发射端的按键号;P0.0~P0.7,P2.0~P2.7的输出经三极管放大后接控制继电器;P3.0,P3.3口接收调解后的红外遥控信号。
需要说明的是;(a)出于在开机时灯应全灭的考虑,P0和P2口在系统上电初始化后将一直保持为高电平,直到接收到发射部分的控制信号,其状态态才会发生改变;(b)红外接收头采用一体化接收器HRM5700B,其解调频率为53.7kHz,当HRM5700B接收到53.7kHz的红外脉冲信号时输出为低电平,反之输出高电平。
它是将光探测器与前置放大器封装在一起,以实现对脉冲编码信号调制的红外光信号的接收。
在系统工作时HRM5700B对接收到的脉冲编码信号进行解调,解调后的信号输入至单片机的P3.0,P3.3口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第25 卷"第1 2003 年1 月
期 """"""""""""""""I
nf
红外技术 rared TechnO1Ogy
""""""""""""""""VOJ1a.n25.
"NO 2003
.1
增加9并可进行被动测距G 三是由于采用集成电路技 术9提高了数据处理速度G 通过利用机载计算机储存跟 踪的目标位置9系统实现了多目标跟踪功能9并可利用 判断逻辑判断出被搜索空域中来袭目标的优先顺序G
I RST 系统9特别是早期的第一代I RST9严格的讲
不是成像系统o一般采用工作在3 !5 "m 的中波器件探 测目标辐射o由于空中背景相对地面背景来说比较简单9
1 )抗干扰\抗隐身能力强9隐蔽性好o
可以把目标作为热点与背景分开9对目标进行搜索和跟
现代各种类型的作战飞机都把发展机载电子战技 踪sFLI R 传感器大都采用工作波长在8 !14 "m 的长波器 术和隐身技术放在突出位置9采用有源探测方式的机 件9探测目标和地面背景的温差成像o飞行员通过图像完
1 "机载I RST 系统介绍
高9飞机的蒙皮气动热辐射越强9I RST 的探测距离越
1 .1 "机载I RST 系统组成及特点 典型的I RST 系统由光机扫描\红外探测\信号处
理和显示装置等部分组成o系统组成原理框图如图1
远o此外9I RST 的角分辨率比雷达高得多9具有多目 标搜索跟踪 能 力9在 对 付 远 距 密 集 编 队 的 目 标 时 将 具 有显著优势o
剧下降9本身隐蔽性差\抗干扰能力弱的缺点越来越明显
2 )探测距离远9分辨率高9具有多目标搜索跟踪能
的暴露出来o为弥补机载雷达在这方面的不足9机载红 力o
外搜索跟踪系统(I RST)产生和不断发展起来o
由于现代 战 斗 机 高 空 高 速 飞 行9留 给 能 成 功 拦 截
这种高空\高速目标的时间极短o而速度越快9高度越
在空战中起着举足轻重的作用o但由于雷达采用有源 载I RST 本身不发射电磁波9抗电磁干扰能力强9能实
探测方式9工作时需要主动发射电磁波9易被敌方发现 现飞机隐蔽探测目标9大大提高了飞机生存能力o在
和干扰o特别是随着现代科技的不断发展9飞机隐身技 强电子干扰环境下9可代替或辅助雷达搜索跟踪目标9
术和电子对抗技术的进步9使得机载雷达的探测距离急 是现代空战环境下的首选传感器o
与第一阶段相比9第二阶段的的机载I RST 具有 三个特点:一是在功能上9机载I RST 作为一个独立系 统9可单独完成目标的搜索跟踪任务9可与雷达分开9 分别监视不同空域9尤其适合搜索高空\高速截击机目 标o二是探测元件采用线列器件\斯特林循环自主冷 却9增加了探测灵敏度9能全方位探测目标9探测距离
月交 付 使 用5 由 意 大 利\ 英 国 和 西 班 牙 组 成 EUROFI RST 集团9在1992 年8 月签订合同研制 PI RATE ( 被动红外机载跟踪设备) 系统装备 Eur Ofi ght er ( 欧洲 战斗 机) 5 法 国 研 制 装 备 OSF 机 载 I RST 系 统 装 备 Raf a1e ( 阵风) 战斗机5瑞典的SAAB 公司也开展了I ROTI S 系统的研制9并在J A-37 战斗机上进行了飞行 试验G 此外9美国为其新一代多用途战斗机JSF 研制 的新一代机载红外探测系统中也包含I RSTG 3 .2 "国外典型机载红外搜索跟踪系统!I RST "的装备 使用情况
第25 卷"第1 2003 年1 月
期 """"""""""""""""I
nf
红外技术 rared TechnO1Ogy
""""""""""""""""VOJ1a.n25.
"NO 2003
.1
机载红外搜索跟踪系统!I RST "综述!
申"洋!唐明文
(空军第八研究所9北京 南苑 100076 )
摘要#"介绍了机载I RST 系统的组成!功能!特点!发展及装备现状"论述了其与 FLI R 的区别"对新一 代红外搜索跟踪系统的要求及技术发展趋势进行了预测#
公司 俯仰 -80 !+59
AN AAS-42 8 !12 "m
美国通用 公司
意大利菲
PI RATE 系统
8 !12 "m 亚尔公司
30
主承包商
低空迎头 24 k m 高空迎头 190 k m 高空尾后 330 k m
晴朗天气 迎头 185 k m
战斗机 迎头74 k m
增加 雷 达 抗 干 扰 能 美国 F-14 A 力9可独立被动探测
由于I RST 的视场大9导致每帧频有大量的像素 数9比 FLI R 高出数倍o由于有关数据只提供计算处 理使用9帧频时间根据作战要求不同在1 !10 s 之间o 此外9在采用高速计算机及相关算法情况下9易于实现 多目标跟踪oFLI R 由于需要实时显示9为免画面闪 烁9以便于人工识别9工作帧频一般在25 !30 帧/s 9一 般不跟踪多目标o 2 .5 "安装形式!位置不同
机载I RST 系统一般采用半埋式安装在机身座舱 玻璃前方9以利于空空搜索和跟踪;机载 FLI R 系统大 多采用吊舱形式挂装在飞机机身下方9以利于多机使 用o在 新 一 代 作 战 飞 机 上9从 隐 身 角 度 考 虑9机 载 FLI R 有向机内安装的趋势o
长期以来9关于是I RST 取代 FLI R 9还 是 FLI R 取代I RST 的问题一直争论不休9从技术发展趋势和 国外装备现状及发展趋势来看9I RST 与 FLI R 系统作 为机载光电系统的两个功能不同的组成部分9在今后 相当长的一段时期将共同存在o
关键词#"红外技术$"搜索跟踪$"机载设备 中图分类号#TN216 ""文献标识码#A ""文章编号#1001-8891 !2003 "01-0013-06
引言
载火控雷达 虽 然 采 取 了 许 多 抗 干 扰 措 施9但 易 受 干 扰
机载火控雷达作为战斗机的主要目标探测手段9 仍是其脆弱的一面o相比之下9以被动方式工作的机
这一阶段的I RST 结构简单9大多采用单元探测 器件9液氮制冷o受当时技术条件所限9尚无独立目标 搜索跟踪能力9而是当雷达跟踪受到干扰时9辅助雷达 完成目标搜索和跟踪o
第二阶段起于60 年代中期9止于70 年代末o以美 国休斯公司(~ughes )为美国海军 F-14 A 雄猫(TO mcat ) 飞机研 制 的 AN/AWG-9 红 外 分 系 统 (即 AN/AWG9I RSTS)为典型代表o系统做成圆筒状安装在 F-14 A 飞机机 身 下 面 中 心 线 处9探 测 器 件 采 用 8 元 锑 化 铟 (InSb )器件9工作波段3 !4 .8 "m9对低空迎头目标探测 距离24 k m9高空迎头90 k m9尾后330 k mo
战任务中o与机载其它电子设备配合使用可大大提高 空对地火控系统9作为夜视传感器主要用于夜间和不
飞机在全波段\全天候\多方位\大纵深环境下的作战 良天气条件下对地面目标的导航和攻击o
生存能力o
2 .2 "工作原理不同
与雷达相比9I RST 系统很像一个宽视场的监视雷 达9除具有昼夜条件下的探测能力外9系统还具有2 个 显著特点C
成对目标的搜索\捕获\识别和跟踪o由于地面目标背 景复杂9驾驶员不可能跟踪热点完成上述任务(尤其是 目标识别任务)o 2 .3 "扫描视场和截获跟踪方式不同
I RST 的搜索范围\扫描方式和截获跟踪方式与 雷达类似9目标的截获和跟踪不需人工参与;FI LR 系 统大都具有宽\窄两个视场9宽视场用于探测9窄视场 用于识别和跟踪9一般不做大范围的扫描9目标的探测 识别需要人工参与o 2 .4 "探测!跟踪算法不同
机载I RST(红外搜索跟踪系统)与机载 FLI R (前 视红外)虽然 都 属 机 载 红 外 系 统9并 都 用 于 火 控9但 在 很多方面有相当大的不同o 2 .1 "功能不同
的搜索和跟踪o通常应用于空域监视\威胁判断\抗电
I RST 适合于机载空空火控系统中9用于对空中目
子干扰\对面对空导弹探测\自动搜索和跟踪目标等作 标搜索和跟踪9可昼/夜全天候使用sFLI R 适合于机载
国外战斗机主要I RST 应用情况见附表1 9下面就 国外典型机载I RST 作一介绍G
表1 "国外典型机载红外搜索跟踪系统情况""Tab1e 1 "Typica1 I RST abrOad
型号名称
工作波段及 制造厂商
探测部位
搜索范围
探测距离
配装机种
用途
美国休斯 方位 65
AN AWG-9 3 .5 !4 .8 "m
目标
美国 F-14 D 远距离隐蔽探测9可 挪威 F-16 同时跟踪多目标
辅助 ECR90 雷达 探 欧洲战斗机 测9具有多目标跟踪
能力
OSF 系统 热定向器
3 !5 "m 8 !12 "m
3 !5 "m
汤姆逊公司 俄罗斯 方位 60