基于嵌入式WinCE的USB摄像头驱动开发
基于WinCE的嵌入式远程实时监控系统

收稿日期:2006-10-24基金项目:安徽省教育厅自然科学研究项目(2005K J006ZD );安徽工程科技学院青年科研基金(2004YQ008)作者简介:凌有铸(1962-),男,安徽庐江人,副教授,研究方向为控制理论与控制工程。
基于WinCE 的嵌入式远程实时监控系统凌有铸,徐晓光,潘 伟(安徽工程科技学院电气传动与控制安徽省高校省级重点实验室,安徽芜湖241000)摘 要:在分析嵌入式技术在工业控制中的应用的基础上,对嵌入式WinCE 系统在远程数据采集中的应用和嵌入式系统中串口通信软件、动态Web 页面以及嵌入式数据库的设计进行了研究。
并以“环保数据远程采集系统”为项目背景,分析了相关的系统模型和程序代码,并对嵌入式系统远程数据采集的设计步骤进行了阐述。
关键词:WinCE 操作系统;串口通信;数据采集中图分类号:TP311 文献标识码:A 文章编号:1673-629X (2007)07-0204-03R emote T esting and Control System B ased on Embedded WinCEL IN G Y ou 2zhu ,XU Xiao 2guang ,PAN Wei(Anhui Province K ey Laboratory of Electric Driver and Control ,Anhui Universityof Technology and Science ,Wuhu 241000,China )Abstract :Analyses the usage that embedded technique used in industry control system.Researched the communication software ,dynamic page and embedded database which used in embedded WinCE system.At last ,analyses the system model and some codes ,demonstrated the steps in this system design.K ey w ords :WinCE operation system ;serial port communication ;data collection 现代工业检测控制中,需要进行统一监控的设备的数量不断增多,而且检测设备的分布越来越广,很多情况下需要通过Internet 进行数据的交换。
基于嵌入式Linux的USB摄像头驱动开发

-1885-0引言USB 接口的普通摄像头由于价格低廉,性能较好,被应用在很多方面,比如可视电话、视频聊天和普通的视频监控。
Dihom (digital house monitor )就是摄像头在视频监控应用的一个例子。
摄像头由主控芯片和传感芯片组成。
主控芯片负责图像采集、压缩以及和主机的通信,通信协议一般采用USB1.1。
在我们的系统中,前端采用摄像头进行图像采集,摄像头连接到嵌入式模块,通过嵌入式模块上的无线网卡发送到远端。
嵌入式模块上采用linux 系统,因此我们需要在其上开发摄像头驱动。
我们使用的摄像头主控芯片型号为Sonix 公司的SN9C101,传感芯片是PAS106。
本文有重点地分析USB 协议驱动模块的分层结构,描述驱动程序的实现,介绍驱动的移植和测试工作。
1USB 协议USB 是一种分层总线结构,并且由一个主机来控制。
主机用主/从协议来和外部USB 设备通信。
USB 上的通信主要有两个方向,分别是主机到设备的下行方向和设备到主机的上行方向,不支持设备之间的直接通信。
每个USB 设备都会有一个或者多个逻辑连接点,称为端点。
每个端点有4种传输方式:控制传输、等时传输、成批传输和中断传输。
但是端点0缺省用来传送配置和控制信息。
同样性质的一组端点的组合叫做接口,而同种类型的接口组合称为配置。
不同配置用于改变整个设备的设置,比如电源消耗等。
每次只能有一个配置处于激活状态,一旦某个配置被激活,里面的接口和端点都可同时使用。
配置、接口和端点的信息存放在称为描述符的数据结构中。
2驱动模块层次结构USB 驱动程序由主控制器驱动、USB 核心驱动和USB 设备驱动程序组成。
通常操作系统本身带有前面两个驱动程序,而开发者只需完成USB 设备驱动的开发工作。
它们之间的层次关系如图1所示。
USB 核心子系统连接USB 设备驱动和主控制器驱动,它通过定义一些数据结构、宏和功能函数来抽象下层硬件设备。
USB 核心子系统为硬件处理供下层接口(lowerAPI ),同时通过上层接口(upperAPI )为USB 设备驱动提供服务。
基于ARM的嵌入式多路远程视频监控系统的设计

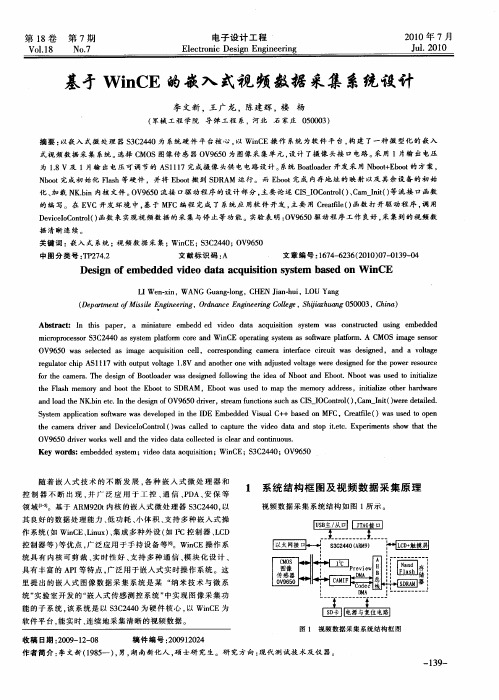
Байду номын сангаас监控计算机 监控计算机
集线器
摄像头云台
视频服务器 摄像头云台
视频服务器
摄像头云台
视频服务器
摄像头
图 1 视频监控系统结构图
3 系统硬件设计
监控系统不仅要实现视频图像的采集和压缩, 同时还需要实现这些数据的网络传输,系统以 ARM
第 36 卷第 5 期
赵书朵等:基于 ARM 的嵌入式多路远程视频监控系统的设计
作为软件开发平台,以 Intel 公司生产的 ARM 芯片 PXA270 为硬件核心,采用罗技摄像头进行实时图像采集,经
JPEG 压缩算法进行编码压缩后,通过以太网发送到远程 PC 监控端,在 PC 监控端通过监控端软件可以实时观看远
程服务器的视频图像,并实现了对摄像头云台的远程控制。
关键词:视频监控;ARM 芯片;Windows CE 5.0 系统;JPEG 算法;云台控制
系统的摄像头云台由两个舵机组成,由飞思卡 尔单片机进行控制,单片机系统要实现对舵机输出 转角的控制,需完成两个任务:(1)产生基本的 PWM 周期信号,即周期为 20 ms 的脉冲信号;(2)脉宽的 调整,即单片机模拟 PWM 信号的输出,并且调整占 空比,控制舵机的转动。
系统中网络传输部分的软件实现运用了 BSD Socket 编程技术,采用的是基于 TCP 协议的流式套 接字[8]。
JPEG 压缩编码
应用层
图像保存显示
嵌
入
本地云台控制
式
系
网络传输
统
软
嵌入式 WINCE 操作系统
件 嵌入式操作系统
体 Windows CE 5.0 系
设备驱动程序
云台控制的核心模块,此款单片机片内资源及 I/O接口
基于WinCE的流接口驱动程序开发
是从 宏观上进 行了研究 , 如文献[ — 】 例 4 5 。本 文主要 结合 Ca — y
ma n开 发 板 上 L CD 显 示 屏 的 背光 控 制 流 接 口 驱 动 程 序 实 例 详
细分 析 了 WiC n E下 流 接 口驱 动 程 序 的 开 发 实 现 流 程 。
t a a i pl L h t sm e CD diply S s a ba l t tea cki sr m dr er u o c yman gh i r ns n a v PXA27 i gie t an y i a pl te 0 s vn o alss m y h pr e s oc s of W i o sr a nd ws CE te m it f c dr e , nera e v i r Key wor : ido CE.te dsW n ws sr am nera ier yman it f ce dr v , Ca PX A27 0
目前 , i Wn CE提 供 了 四 种 设 备 模 型 ,其 中 两 种 是 专 门 用 于 WiC 的模 型 , 外 两 种 外 部 模 型 来 自其 他 的 操 作 系统 。 基 于 nE 另 WiC 的 两 种 模 型 是 本 机 的 设 备 驱 动 程 序 和 流 接 口的 驱 动 程 nE 序 。 两种 外 部 模 型 用 于 通 用 串行 总 线 ( S 和 网 络 驱 动 器 接 口 U B) 标 准 ( DI)驱 动 程 序 。 其 中流 接 口驱 动 程 序 是 为 连 接 到 基 于 N S WjCE平 台 的外 围 设 备 而 设 计 的 , 些 外 围 设 备 包 括 S 卡 、 n 这 D 摄 像 头 、 印 机 等 。目前 针 对 流接 口驱 动 程序 的设 计 和 开 发 很 多 都 打
实验五WinCE中的驱动程序开发

WinCE中的驱动程序开发一.实验目的1、熟悉WinCE中流式接口驱动程序的12个接口的功能。
2、掌握流式驱动程序的工作过程。
3、能够编写出流式接口的驱动程序。
二.实验内容使用VS2005的智能设备应用程序开发方法,进行网络通信的编程,并通信多线程技术实现服务器与客户端之间的文件传输。
三.实验设备及工具硬件:PC机一台;软件:Windows XP操作系统,VS2005开发环境,WinCE 6.0开发环境,或Windows Mobile 5.0 SDK四.实验步骤及说明(1)写出流式接口驱动程序的12个接口,及每个接口的功能。
答:见教材515页(2)写出流式驱动程序的工作过程。
答:第一步:加载驱动程序,主要有两种加载方式:(1)当系统启动时,设备管理器搜寻注册表的HKEY_LOCAL_MACHINE\Drivers\BuiltIn键下面的子键,并逐一加载该子键下的每一个驱动,此过程称为BusEnum;(2)应用程序可调用ActivateDeviceEx()函数动态地加载驱动程序。
第二步:设备管理器从注册表的dll键值中获取驱动程序所在的DLL文件名。
第三步:设备管理器调用LoadDriver()函数把该DLL加载到自己的虚拟地址空间中。
第四步:设备管理器在注册表的HKEY_LOCAL_MACHINE\Drivers\Active下,记录所有已经加载的驱动程序。
第五步:设备管理器调用驱动程序中的COM_Init函数,并把上一步中添加的注册表项的完整路径作为COM_Init函数的第1个参数传入驱动程序内。
第六步:在COM_Init中,通常须对硬件进行一些最基本的初始化操作。
通过以上的操作完成流式驱动程序的加载任务。
对驱动程序的操作:第一步:应用程序使用该设备。
首先,应用程序调用CreateFile(TEXT(“COM1”)….)打开设备。
然后,文件系统判断打开的是文件还是设备。
最后,如果打开的是设备,就将控制权交回设备管理器。
基于嵌入式WinCE的温度采样系统设计

基于嵌入式WinCE的温度采样系统设计作者:吴秀明胡捷来源:《城市建设理论研究》2013年第21期摘要:本文提出了一种基于S3C6410嵌入式开发平台和DS18B20的智能数字温控系统的设计方法。
该系统通过数字温度传感器DS18B20将温度数据采集并存储,同时将温度信息通过串口传送至LCD输出显示,实现对当前环境温度数据显示和实时温度变化曲线的绘制。
系统测试表明,该系统操作简单,处理速度快,测量精度范围不超过±1℃,具备较高的实际应用价值,能够满足在特定场合下对实时温度的采集要求。
关键词:WinCE;S3C6410;DS18B20;温度采集;中图分类号:S611 文献标识码:A 文章编号:1 引言嵌入式系统是针对具体应用设计的“专用系统”。
它的硬件和软件具有高效的设计,力争在较少的资源上实现更高的性能。
与通用计算机相比,嵌入式系统以其体积小,功耗低,集成度高等优点广泛应用于军事国防,消费类电子,信息家电,工业控制等领域。
温度是工业生产中重要的参数之一,对温度的实时监测对于保证产品质量与安全生产尤为重要。
传统的温度采集系统由于存在响应慢、精度低、可靠性差、效率低等弊端,已经不能完全适应现代化工业的高速发展。
随着嵌入式系统的迅猛发展,设计高速度,高效率,低成本,高可靠性的温度采集系统成为当务之急。
基于以上两点,本文提出了以嵌入式系统硬件平台与WinCE6.0操作系统相结合的温度采样系统。
该系统具有处理速度快,测量精度高等特点,能够稳定运行在恶劣的工作环境。
2 系统硬件介绍本系统基于飞凌OK6410嵌入式平台,该平台集成了多种高端接口,如复合视频信号、摄像头、USB、SD卡、液晶屏、以太网,并配备温度传感器和红外接收头等外围设备接口。
采样系统硬件主要包括显示屏,数字温度计DS18B20以及基于ARM11处理器S3C6410。
ARM11处理器拥有强大的内部资源和视频处理能力,可稳定运行在667MHz主频以上,支持Mobile DDR和多种NAND Flash。
winusb设备的开发方法

winusb设备的开发方法
开发WinUSB设备涉及一些复杂的步骤和概念,需要一定的专业
知识和经验。
以下是开发WinUSB设备的一般步骤和方法:
1. 硬件设计,首先需要设计和制造符合WinUSB标准的硬件设备。
这可能涉及选择合适的芯片、接口和电路设计。
2. 驱动程序开发,WinUSB设备需要相应的驱动程序来与Windows操作系统进行通信。
通常使用微软提供的WinUSB驱动框架
来开发驱动程序。
开发驱动程序需要熟悉Windows Driver Kit (WDK) 和 Windows Driver Framework (WDF)。
3. USB描述符配置,在设备固件中配置USB描述符,以确保设
备能够正确地与Windows系统进行通信。
描述符包括设备描述符、
配置描述符、接口描述符等。
4. 测试和调试,在开发过程中需要进行大量的测试和调试工作,确保设备和驱动程序的稳定性和兼容性。
可以使用微软提供的HLK (Windows Hardware Lab Kit) 进行测试。
5. 证书签名,最终的WinUSB驱动程序需要通过微软的数字签名认证,以确保安全性和兼容性。
这需要申请和获取相应的数字证书。
需要注意的是,开发WinUSB设备需要一定的专业知识和经验,包括硬件设计、驱动程序开发、USB协议等方面的知识。
此外,开发过程中可能会遇到各种问题和挑战,需要耐心和细心地解决。
最好的方法是参考微软官方文档和开发者社区的经验,以及与经验丰富的开发者进行交流和讨论。
WinCE6.0下双模终端的USB转串口驱动开发

0 引 言
我国 3 G牌 照 的 发放 , 宣告 了 3 时代 的到 来 , G
基于 T —C MA和 C MA WC MA 的双 模 终 端 将 DS D D / D 取代 2 时代 的单 模 终 端 。诺 基亚 、 星 、 为 、 G 三 华 中 兴等 国 内外 通 信 厂 商 都 积 极 投 入 到 双 模 手 机 终 端 的开发 中来 , 目前 双模 手 机终 端 的研发 已经 成 为热 点 。当前市场 中主要 的智 能手 机操 作 系统 有 : o i N ka 主推 的 Sm in 开 放 内核 的嵌 入 式 Ln x 微 软 的 y ba , iu , WiC n E等 。由于 WiC 6 0嵌人 式 系统具 有实 时性 n E.
Wi E. U B设备驱动开发只提供了一些底层支持 n 60对 S C
的原因, 以通 信 模 块 厂 商 未 提 供 WiC 6 0下 的 所 nE .
U B驱 动 , 要 实 现 通 信 模 块 的基 本 功 能 , 开 发 S 而 除
纯 U B驱 动 外 , WiC 6 0下 , 需 要 修 改 Mo S 在 nE. 还 . d m源码 , e 存在 着开 发 周 期 长 、 作量 大 、 容 性 差 工 兼 等 问题 , 给开发 人 员带 来 了极 大 的不 便 。而通 过 串 口直接对 Mo e dm进 行操作 , 不仅 避 免 了上述 在开 发 中存 在 的问 题 , 时 由于操 作 Mo e 的 是 虚 拟 串 同 dm 口, 由它来 适 配 Moe 不 会 出 现 由物 理 串 口操 作 d m, Mo e 时制 约 M d m处理速 率 的问题 , 然保持 了 dm oe 仍 U B高 速的特 点 , 开 发人 员 只 需 开发 出对应 模 块 S 故 的 U B转 串 口驱 动 亦 可实 现 上 网 、 电话 等 功 能 ; S 打
基于嵌入式WinCE的GPIO驱动开发
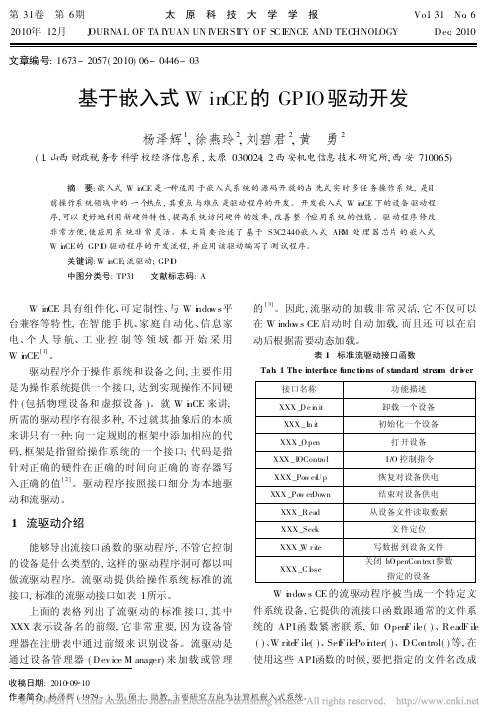
接口名称
功 能描述
XXX _D e in it XXX _In it XXX _O pen
XXX _IOContro l XXX _Pow erU p XXX _Pow erDown
XXX _R ead XXX _Seek XXX _W r ite
XXX _C lose
卸载 一个设备 初始化一个设备
0, NULL, O PEN _EX IST ING, 0, NULL );
对于每个按钮的响应内容基本上是类似的, 绘 制一个圆来表示灯的亮和灭, 下面仅列出 LED1亮 这个按钮的内容:
CDC * pDC = new CC lientDC( this) ; CB rush brush; Dev ice IoContro l( gp iodr iver, IO _CTL _G P IO _1_ON, NU LL, 0, NULL, 0, NU LL, NU LL ); brush. CreateSo lidBrush( RGB( 255, 0, 0) ); CB rush* pO ldBrush = pDC - > Se lectO b jec t(& brush); pDC- > E llipse( 105, 10, 117, 22); pDC- > SelectO bject( pO ldBrush);
GP IO 口的控制首先需要设 GPXCON 寄存器为 输出功能, 然后再通过设 GPXDAT 寄存器的值为 0 或 1来实现控制 GP IO 口的低或高电平。
S3C2440开发板中提供了 4个 LED 灯, 它们分 别由 GPB5 到 GPB8 这 4 个 GP IO 口来 控制, 当要 LED灯亮时, 需要将对应的 GPBn脚拉低 ( 即设置为 0) ; 当要 LED 灯灭时, 需要拉 (即设置为 1)。
基于WinCE的嵌入式视频数据采集系统设计
( e ate tfMi i nier g Od ac n n e n ol e S  ̄aha g00 0 , hn ) D pr n o s l E gnei , rnn eE g e r gC lg , h i u n 5 0 3 C ia m se n i i e iz
Ab t a t I t i a e , a sr c : n h s p p r mi it r e e d e vd o aa c u s in y t m w s o s u td sn e e d d n au e mb d d i e d t a q ii o s s t e a c n t ce u i g mb d e r mi rp o e s r¥ C2 4 ss se p afr c r n i C p r t g s se a ot r l t r A c o r c so 3 4 0 a y tm lt m oe a d W n E o e ai y tm s s f o n wae p a o m. CMO ma e s n o f S i g e s r OV 6 0 w s ee td s i g c u st n c l, c re p n i g c me a i tr c i u t wa e in d, a d a v l g 9 5 a s lce a ma e a q ii o el o r s o d n a r n e f e cr i i a c s d sg e n ot e a
第 1 8卷 第 7期
Vo .8 11
No7 .
电子设计 工 程
El cr n c De in En i e rn e to i sg g n e i g21 0 0年 源自月 J12 0 u. 01
WinCE.NET下USB OTG设备驱动程序设计
下USB OTG设备驱动程序设计孔旋,邓中亮北京邮电大学电子电子工程学院计算机应用技术专业,北京(100876)E-mail:kongxuan1982@摘要:本文介绍了USB OTG技术,分析了两用USB OTG设备驱动程序配置模型以及下设备驱动程序模型,并详细介绍了下pl2303的usb转串口桥接器芯片驱动程序的设计与实现。
关键词:USB OTG,,驱动程序1.引言USB,全称是Universal Serial Bus(通用串行总线)。
在1994年年底,由当时的康柏、IBM、Microsoft等多家公司联合发起成立的通用串行总线开发者论坛(USB Implementers Forum,简称USB IF)先后陆续推出了USB0.7、USB1.1、USB2.0规范,其理论传输数率最高可达480Mb/s。
最近,根据现有的USB接口在有线/无线,性能及应用规范上的不同,USB IF将USB接口分为5类,并发布了相应的标识,分别是:Wireless USB、Original USB、Hi-Speed USB、On-The-Go USB及Hi-Speed On-The-Go USB[1] 。
是微软公司向嵌入式领域推出的一款紧凑、高效的32位嵌入式操作系统,具有多任务、实时性、模块化及可伸缩性、强大的通信和多媒体能力等特点[2] ,在移动计算、工业控制和信息家电等诸多领域都有广泛的应用。
本文将通过工具Platform Builder实现TI OMAP850 PDA手机平台下USB OTG设备驱动程序,并实现基于OTG技术的一种应用——在无PC条件下,以PDA手机平台端为USB 主机端的数据通信。
B OTG技术2.1 OTG技术简介USB技术的发展,使得PC和周边设备能够通过较简单、可方便热插拔的方式连接在一起,通过USB总线,在PC的控制下进行数据交换。
但这种方便的数据交换方式,就在不久以前(10年以内),一旦离开了PC,各设备间无法利用USB接口进行操作,因为当时没有任何一种PC以外的其他设备能够充当PC一样的Host。
基于嵌入式的智能家居系统设计与实现

基于嵌入式的智能家居系统设计与实现随着科技的不断进步,物联网技术得到了突飞猛进的发展。
智能家居是物联网技术的典型应用领域之一。
智能家居系统将独立家用电器、安防设备连接成一个具有思想的整体,实现家居设备的智能管理和远程监控。
本课题的嵌入式平台采用WinCE操作系统,硬件设备采用ARM10架构的Intel XScale270核心处理器的实验箱作为技术支撑。
系统设计与实现使用Keil、VS2005和Delphi三种集成开发工具实现代码的编写与调试。
软件部分主要涵盖硬件网关设备的WinCE操作系统相关功能设计、嵌入式设备平台服务端软件设计、计算机客户端应用软件的设计及家电控制端底层的设计。
智能家居系统与用户数据交互采用GSM系统,通过短信的方式实现。
家居设备之间的数据通信采用TCP/IP网络协议,建立三次握手机制,保证数据传输稳定可靠。
系统对WinCE系统内核进行裁剪定制,提高数据的处理能力。
在网关内设计开发用于WinCE系统的控制中心,即嵌入式服务端,实现硬件设备与软件系统数据握手通信。
计算机客户端的应用软件设计,即视频采集查阅软件,是基于Delphi可视化界面开发语言编写进行设计。
客户端应用软件用于异地及时通过视频画面掌握家居状态环境。
本课题基于嵌入式的智能家居系统的设计与实现,使用嵌入式平台作为核心控制器能够提高整个系统的稳定性,数据传输采用TCP/IP协议能够很好解决目前一些系统中存在的数据传输不稳定问题。
基于嵌入式的方式能够降低智能家居系统的成本,大大降低市场中由于智能家居价格较高无法普及现象,使智能家居能够走入普通百姓家中。
关键字:智能家居系统,物联网,嵌入式技术,WinCE系统,DelphiDesign and Implementation of Smart Home System Based onEmbedded SystemWith the constant progress of science and technology, Internet of things (IOT) technology develops by leaps and bounds. Smart home is one of the typical applications of IOT. Smart home system links home appliances and security equipment as a whole with the soul, implementing intelligent management and remote monitoring of the household equipment.In this project, the embedded platform adopts the WinCE operating system, and the hardware device uses an experiment box with Intel XScale270 core processor based on ARM10 architecture as the technical support. System design and implementation uses Keil, VS2005, and Delphi integrated development tools to edit and debug the codes. Software mainly covers the WinCE operating system function design of the hardware gateway device, platform server client software design of the embedded devices, the computer client application software design and the household appliance control bottom program design.Interaction of smart home system with the user uses GSM system with short message service. Data communications between household equipment adopts TCP/IP network protocol, setting up a three-way handshake mechanism, to ensure stable and reliable data transmission. The system truncates and customizes the WinCE system core to improve data processing ability. In the gateway, the control center for the WinCE system, namely embedded server, can be developed to realize the data communication between the hardware and software system. Computer client application software design, namely the video acquisition carried out based on Delphi visualization interface development language. The client application software is used in mastering the household environment timely by video images in the remote places. The design and implementation of intelligent Home Furnishing system based on embedded system, using the embedded platform as the core controller can improvethe stability of the whole system, data transmission using TCP/IP protocol can solve data transmission system exists the unstable problem. Embedded system can reduce the cost of smart home system, greatly reducing the market because of the high price of smart home can’t be universal phenomenon, so that smart home can go into the homes of ordinary people.Keywords:smart home system, IOT, embedded technology, WinCE system, Delphi目录第1章绪论 (1)1.1 研究背景及意义 (1)1.2 智能家居研究现状与发展 (3)1.2.1 智能家居国内外发展现状 (3)1.2.2 智能家居发展趋势 (4)1.3 本课题研究内容 (5)1.4 论文结构 (6)第2章系统设计方案 (8)2.1硬件总体设计框图 (8)2.2控制核心选择 (10)2.3家电控制板 (11)2.3.1串行端口电路 (12)2.3.2家电控制电路 (14)2.3.3传感器接口电路 (15)2.4 GSM通信模块 (15)2.5视频监控模块 (16)2.6总体软件设计方案 (17)2.7本章小结 (18)第3章操作系统的定制 (19)3.1 BSP的安装 (19)3.2添加平台特征和配置平台 (20)3.3串口部分设置与调试 (22)3.4操作系统的生成与下载 (24)3.5本章小结 (24)第4章应用软件设计 (26)4.1应用程序编写环境 (26)4.2智能家居人机接口设计 (26)4.3串口通信功能设计 (30)4.3.1串口通信协议 (30)4.3.2软件的实现 (31)4.3.2.1打开串口与配置串口 (32)4.3.2.2关闭串口 (35)4.3.2.3串口读线程 (36)4.3.2.4串口实现数据的写入 (37)4.3.2.5串口类的调用 (38)4.3.2.6串口的监听 (38)4.4 GSM无线数据传输模块 (39)4.4.1 GSM无线数据传输的基础 (39)4.4.1.1 PDU编码规则 (39)4.4.1.2 AT指令 (41)4.4.2 软件的实现 (42)4.4.2.1 PDU编码解码 (42)4.4.2.2 CEncode类成员函数详解 (44)4.4.2.3 收发短信 (53)4.5 图像采集模块 (55)4.5.1 摄像头驱动程序 (55)4.5.2 视频捕捉和视频信息传送 (56)4.6 以太网通信模块 (57)4.6.1 TCP/IP协议 (57)4.6.2 软件实现 (58)4.7 客户端视频监控软件 (61)4.8 家电控制及传感器模块 (63)4.8.1 单片机串口使用及参数设置 (63)4.8.2 串口通信的自定义约定 (64)4.8.3 单片机程序流程 (65)4.8.4 ARM端控制和报警流程 (68)4.9本章小结 (68)第5章系统测试 (70)5.1测试环境 (70)5.2 测试步骤 (70)5.3本章小结 (75)第6章总结与展望 (77)6.1本文的总结 (77)6.2 对本课题前景的展望 (78)参考文献 (79)作者简介及在学期间所取得的科研成果 (82)致谢 (83)第1章 绪论1.1 研究背景及意义我国伴随经济化建设的步伐持续加快与深入,中国百姓生活逐渐面向全面小康化方向前进,使得寻常百姓生活质量也随之提升一个层次。
USB摄像头驱动移植

1通过SMB服务将SDK-H264/server目录拷贝到项目目录下
2解压内核到当前目录
命令#cd /home/guoqian/project/h264/server/kernel
#tar zxvf linux.2.6.29.tar.gz
解压完成后的文件为linux2.6.29
3清理中间文件、配置文件命令#cd linux-2.6.29
#make distclean
4选择参考配置文件
命令#cp config-h264 .config
5配置内核
#make menucofing ARCH=arm CROSS_COMPILE=arm-linux-
要使内核支持USB摄像头驱动,内核必须选上以下配置选项Device drivers→multimedia devices→
Video capture adapters→V4L USB devices→
最后保存退出。
配置文件config-h264已配置了上述选项
6编译内核
命令#make ulmage ARCH=arm CROSS_COMPILE=arm-linux-
编译完成后生成的内核映像ulmage位于arch/arm/boot/目录下。
7将ulmage拷贝到tftp服务目录/tftpboot
命令#cp arch/arm/boot/ulmage /tftpboot/ulmage-h264
至此USB摄像头驱动移植的工作就完成了。
基于嵌入式系统的DNC系统开发
基于嵌入式系统的DNC系统开发摘要:本文对dnc系统在制造业发展中的地位和作用进行了分析,论述了dnc系统的体系结构和软硬件架构,对利用嵌入式系统构建dnc的过程进行了探讨,对dnc系统的功能和实现技术进行了介绍。
关键词:嵌入式系统;dnc中图分类号:tp316 文献标识码:a 文章编号:1007-9599 (2013) 04-0000-021 引言在我国,随着数控设备在生产实际中的应用越来越广泛。
如何在企业的生产过程中,对大量的数控设备进行有效的管理、控制,提高数控设备的使用效率,就成为一个亟需解决的技术难题。
为解决这些问题,各种应用系统应运而生,其中,dnc (distributednumericalcontrol),是一个为按要求向各台机床分配数据,并将一组nc程序与存储零件程序或机床程序的公用存储器连接起来的系统。
它可以作为制造执行系统(mes)的一个组成部分,也可以独立于mes单独运行。
它通过对nc程序的传输和管理,达到提高数控设备的使用效率的目的。
本文通过某工厂的dnc 项目,详细介绍dnc系统的开发过程。
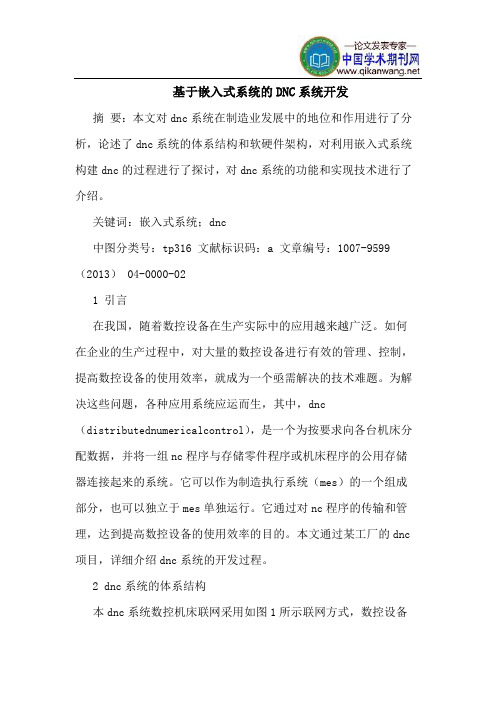
2 dnc系统的体系结构本dnc系统数控机床联网采用如图1所示联网方式,数控设备的联网采用基于32位嵌入式系统联网终端,每台加工中心配置一套联网终端,设置一个网络节点,每台加工中心都有独立的通讯通道,可以进行nc程序的上传和下载操作及与加工中心之间的nc程序传输通讯操作。
在局域网中设置两台服务器,nc程序服务器、数据库服务器,nc程序服务器负责与各嵌入式系统联网终端进行通讯,负责执行各嵌入式系统联网终端的查询、下载、上传等操作,并将操作结果返回给嵌入式系统联网终端。
3 dnc系统的软件架构在图1所示的dnc体系结构下,本dnc系统软件架构共分两层,服务器层与客户层。
服务器层主要接收客户端发送来的操作请求,并解析各命令,连接oracle9i数据库,进行数据库的相关操作,并将结果返回给客户端;客户端主要完成与机床端的通讯,包括nc 程序的上传、下载,另外还要完成nc程序上传到数控库服务器、从数据库服务器下载nc程序以及在数据库中进行nc程序相关纪录的管理。
视频监控系统总体设计方案2022年

〔附件一〕视频监控系统的总体设计方案1.视频监控系统概述视频监控系统是安防建设的一个重要手段。
随着计算机网络、多媒体技术、人工智能以及工程掌握的进展,视频监控系统已经开头由原来的模拟视频监控系统转向视频监控系统的数字化、网络化、智能化的争论。
由于视频信息的直观性可以使决策者和科技人员获得动感和感性的认知,视频信号的采集、处理就越来越受人们的重视。
视频监控系统作为视频技术最根本的应用领域已经在人们的生活、科研以及国防建设中发挥这举足轻重的作用。
在众多的视频采集系统中,嵌入式的视频采集以其小巧、敏捷、低本钱、高性能的特点具有独特的优势。
结合嵌入式 WINCE 支持TCP/IP 的特性,可以更好地利用兴旺的网络技术,通过建立用户效劳器工作模型来实现远程视频监控。
如今,通过网络实现远程监控是视频采集技术的一个进展趋势。
系统将设备采集到的数据通过网络传送到视频效劳器或视频监控中心的数据库中,从而实现低本钱网络互联、信息沟通。
无线视频采集监控则是网络化视频采集监控领域最前沿的应用模式之一。
随着嵌入式技术和视频通信技术的不断进展,移动环境下的监控越来越受到重视,无线视频监控将会有格外大的市场。
本课题结合嵌入式技术和视频通信技术,在无线局域网/Internet 网络环境下建立一个视频监控系统。
该系统的嵌入式客户端基于 WALN 及Internet 特性,有效地利用网络带宽大,稳定性及牢靠性高,为客户供给高品质的视频图像。
视频监控系统根本原理图如图一所示图 1 视频监控系统根本原理图2.争论意义关于嵌入式系统的定义有多种不同的定义,但被大多数人所承受的是“嵌入式系统是以应用为中心,以计算机技术为根底,并且软硬件可裁剪,功能、牢靠性、本钱、体积、功耗有严格要求的专用计算机系统。
”一该定义强调软、硬件可裁剪、专用计算机系统的特点,这也是嵌入式系统与通用计算机平台最为显著的差异。
嵌入式系统一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序等四个局部组成,用于实现对其他设备的掌握、监视或治理等功能。
利用windriver开发了个usb的驱动,写个开发心得
利用windriver开发了个usb的驱动,写个开发心得利用windriver 开发了个usb的驱动,写个开发心得项目组需要利用2440采集数字电视的采样数据,所以让我开发一个usb的数据采集系统,就两个要求1 速度要达到500kbyte/s以上2 稳定由于之前没有做过windows驱动的经验,所以花了3,4天时间读了读ddk的文档,期间还上chinapub找个本书,读了免费的第1章,按照他配置了vc的编译环境,呵呵。
然后就吧ddk下面的bulkusb源代码进行了修改,写好usb device的驱动,有些了个应用程序,测试一下,采集数据是ok了,但是发现有时候蓝屏,特别是采集100m左右,就会出现蓝品!这下没办法了,由于我本身就对windows内核编程不熟悉,有调试了大概3,4天确认问题可能处在电源管理方面,联系到自己对这方面不是很熟悉,而且时间紧迫,没办法转向windriver开发!我安装的是9.21版本(请到迅雷下载)。
1. 驱动的开发:a 这步开发比较简单,首先确认你的device固件正确能枚举成功,然后将device连接到pc usb ho st 端。
b 按照向导指引刷出你的设备进行配置,然后点击编译按钮生成代码。
这部分内容请参考安装文档的快速开发向导!2.应用程序开发:最主要的几个函数是,opendevice 和readwrite 函数:其实大家只要摘录向导生成代码的内容即可,这里贴一个我的static WDU_DRIVER_HANDLE hDriver = 0;static DRIVER_CONTEXT DrvCtx ;static BOOL DLLCALLCONVDeviceAttach(WDU_DEVICE_HANDLE hDevice,WDU_DEVICE *pDeviceInfo, PVOID pUserData){DRIVER_CONTEXT *pDrvCtx = (DRIVER_CONTEXT *)pUserData;DEVICE_CONTEXT *pDevCtx, **ppDevCtx;DWORD dwInterfaceNum = pDeviceInfo->pActiveInterface[0]->pActiveAltSetting->Descript or.bInterf aceNumber;DWORD dwAlternateSetting = pDeviceInfo->pActiveInterface[0]->pActiveAltSetting->Descript or.bAlt ernateSetting;TRACE("\nDeviceAttach: received and accepted attach for vendor id 0x%x, ""product id 0x%x, interface %ld, device handle 0x%p\n",pDeviceInfo->Descriptor.idVendor,pDeviceInfo->Descriptor.idProduct,dwInterfaceNum, hDevice);/* Add our device to the device list */pDevCtx = (DEVICE_CONTEXT *)malloc(sizeof(DEVICE_CONTEXT));if (!pDevCtx){ERR("DeviceAttach: failed allocating memory\n");return FALSE;}BZERO(*pDevCtx);pDevCtx->hDevice = hDevice;pDevCtx->dwInterfaceNum = dwInterfaceNum;pDevCtx->dwVendorId = pDeviceInfo->Descriptor.idVendor;pDevCtx->dwProductId = pDeviceInfo->Descriptor.idProduct;pDevCtx->dwAlternateSetting = dwAlternateSetting;OsMutexLock(pDrvCtx->hMutex);for (ppDevCtx = &pDrvCtx->deviceContextList; *ppDevCtx;ppDevCtx = &((*ppDevCtx)->pNext));*ppDevCtx = pDevCtx;pDrvCtx->dwDeviceCount++;OsMutexUnlock(pDrvCtx->hMutex);OsEventSignal(pDrvCtx->hEvent);/* Accept control over this device */return TRUE;}static VOID DLLCALLCONV DeviceDetach(WDU_DEVICE_HANDLE hDevice, PVOID pUserData) {DRIVER_CONTEXT *pDrvCtx = (DRIVER_CONTEXT *)pUserData;DEVICE_CONTEXT **pCur;DEVICE_CONTEXT *pTmpDev;BOOL bDetachActiveDev = FALSE;TRACE("\nDeviceDetach: received detach for device handle 0x%p\n", hDevice);OsMutexLock(pDrvCtx->hMutex);for (pCur = &pDrvCtx->deviceContextList;*pCur && (*pCur)->hDevice != hDevice;pCur = &((*pCur)->pNext));if (*pCur == pDrvCtx->pActiveDev){pDrvCtx->pActiveDev = NULL;pTmpDev = *pCur;*pCur = pTmpDev->pNext;free(pTmpDev);pDrvCtx->dwDeviceCount--;OsMutexUnlock(pDrvCtx->hMutex);if (bDetachActiveDev){/* When hDeviceUnusedEvent is not signaled, hDevice is possibly in use,* and therefore the detach callback needs to wait on it until it is* certain that it cannot be used.* When it is signaled - hDevice is no longer used. */OsEventWait(pDrvCtx->hDeviceUnusedEvent, INFINITE);}}DWORD DriverInit(WDU_MATCH_TABLE *pMatchTables, DWORD dwNumMatchTables, const PCHAR sDriverName, const PCHAR sLicense, DRIVER_CONTEXT *pDrvCtx) {DWORD dwError;WDU_EVENT_TABLE eventTable;/* Set Driver Name */if (!WD_DriverName(sDriverName))ERR("Error: Could not set driver name to %s, exiting\n",sDriverName);return WD_SYSTEM_INTERNAL_ERROR;}dwError = OsEventCreate(&pDrvCtx->hEvent);if (dwError)ERR("DriverInit: OsEventCreate() failed on event 0x%p: error 0x%lx " "(\"%s\")\n", pDrvCtx->hEvent, dwError, Stat2Str(dwError));return dwError;}dwError = OsMutexCreate(&pDrvCtx->hMutex);if (dwError){ERR("DriverInit: OsMutexCreate() failed on mutex 0x%p: error 0x%lx " "(\"%s\")\n", pDrvCtx->hMutex, dwError, Stat2Str(dwError));return dwError;}dwError = OsEventCreate(&pDrvCtx->hDeviceUnusedEvent);if (dwError){ERR("DriverInit: OsEventCreate() failed on event 0x%p: error 0x%lx " "(\"%s\")\n", pDrvCtx->hDeviceUnusedEvent, dwError, Stat2Str(dwError));return dwError;OsEventSignal(pDrvCtx->hDeviceUnusedEvent);BZERO(eventTable);eventTable.pfDeviceAttach = DeviceAttach;eventTable.pfDeviceDetach = DeviceDetach;eventTable.pUserData = pDrvCtx;dwError = WDU_Init(&hDriver, pMatchTables, dwNumMatchTables, &eventTabl e, sLicense, WD_ACKNOWLEDGE);if (dwError)ERR("DriverInit: failed to initialize USB driver: error 0x%lx ""(\"%s\")\n", dwError, Stat2Str(dwError));return dwError;}return WD_STATUS_SUCCESS;}VOID DriverUninit(DRIVER_CONTEXT *pDrvCtx){DEVICE_CONTEXT *pCur, *pTmpDev;if (pDrvCtx->hEvent)OsEventClose(pDrvCtx->hEvent);if (pDrvCtx->hMutex)OsMutexClose(pDrvCtx->hMutex);if (pDrvCtx->hDeviceUnusedEvent)if (hDriver)WDU_Uninit(hDriver);/* Release any remaining devices */ pCur = pDrvCtx->deviceContextList; while (pCur){pTmpDev = pCur;pCur = pCur->pNext;free(pTmpDev);}}DWORD OpenUsbDevice( void){DWORD dwError;WORD wVendorId = 0;WORD wProductId = 0;WDU_MATCH_TABLE matchTable; BZERO(DrvCtx);wVendorId = USE_DEFAULT;wProductId = USE_DEFAULT;/* use defaults */if (wVendorId == USE_DEFAULT)if (wProductId == USE_DEFAULT)wProductId = DEFAULT_PRODUCT_ID;BZERO(matchTable);matchTable.wVendorId = wVendorId;matchTable.wProductId = wProductId;dwError = DriverInit(&matchTable, 1, DEFAULT_DRIVER_NAME,DEFAULT_LICENSE_STRING, &DrvCtx);if (dwError){goto Exit;}/* Wait for the device to be attached */dwError = OsEventWait(DrvCtx.hEvent, ATTACH_EVENT_TIMEOUT); if (dwError){if (dwError==WD_TIME_OUT_EXPIRED){ERR("Timeout expired for connection with the device.\n""Check that the device is connected and try again.\n");}else{ERR("main: OsEventWait() failed on event 0x%p: error 0x%lx " "(\"%s\")\n", DrvCtx.hEvent, dwError, Stat2Str(dwError));}goto Exit;OsMutexLock(DrvCtx.hMutex);if (!DrvCtx.dwDeviceCount){OsMutexUnlock(DrvCtx.hMutex);return 1;}OsMutexUnlock(DrvCtx.hMutex);if (!DrvCtx.pActiveDev)DrvCtx.pActiveDev = DrvCtx.deviceContextList; OsEventReset(DrvCtx.hDeviceUnusedEvent);return 0 ;Exit:DriverUninit(&DrvCtx);return dwError;}void CloseUsbDevice( void){DriverUninit(&DrvCtx);}DWORD UsbRead(char *pBuffer , DWORD dwBufferSize , PDWORD pdwBytesTransferred){DWORD dwError ;WDU_DEVICE_HANDLE hDevice;OsMutexLock(DrvCtx.hMutex);hDevice = DrvCtx.pActiveDev->hDevice;OsMutexUnlock(DrvCtx.hMutex);dwError = WDU_TransferBulk(hDevice, 0x81,TRUE, 0, pBuffer,dwBufferSize,pdwBytesTransferred, TRANSFER_TIMEOUT);return dwError ;}3.驱动程序的发布:这个也比较简单,请参考自带文档usb manual 的11章节,其实就是用到了他的一个wdreg工具,我写了个批处理文件,想安装的直接点批处理即可!windriver开发驱动是比较方便,至于稳定性,现在正在测试,看来比较稳定!速度方面500kB是没问题!不过速度方面pc驱动固然有影响,device的firmware影响也是很大的,特别是双缓冲的ep,处理不当速度很难上去!。
基于wince6.0的高像素摄像头驱动设计与实现

低 ,无 法 满 足 人 们 即 时 捕 获 高 质 量 图 片 和 视 频 的 需 求 。 ቤተ መጻሕፍቲ ባይዱ 文
S3C6410是 SAMSUNG公 司 基 于 ARM ll76的 一 款 低 功
字 识别方 面 ,通过插 值等 方法达 到伪 高分辨 率 的图像达 不到 率 、高性价 比、高性能低 功耗的RSIC通 用微处理器 ,它采用
A bstraet:On account of the lim itation of system resources in em bedded platform s.m ethods like interpolation are com m only applied to obtain pseudo—high—resolution im ages,bu t which cannot m eet the requirem ents of character recognition. In order to solve this problem ,the t h esis f irstly analyzes the cam era m odule interface features of the em bedded processor ¥3C64 1 0,and then introduces the connection m ethod between the cam era m odule interface and CM O S cam era hardware.
识 别 要求 ’ ,实 际捕 获 高 分辨 率 ,高 质量 图像成 为 必要 条 64/32bit的 内部总线架 构 ,融合 AXI、AHB、APB总线 。典
摘 要 : 由于 嵌入 式系 统 的 系统 资 源 的有 限性 ,系 统上 的摄 像 头设 备 多通 过 插 值 等方 法 获 得伪 高 分 辨率 ,无 法 满 足 文 字 识别 应 用 的需 求 。为 解决 这 个 问题 ,文章 首 先分 析 了¥3C6410嵌 入 式 处理 器 的camera模 块 接 口的特性 ,介绍 其 与 CMOS摄像 头 的硬 件 连接 方 法 ,并 在W indows CE6.0操作 系 统上 采 用DirectShow技术 设 计 并实 现 了500万像 素 高分 辨 率 摄 像 头 驱动 。通过 实 验进 行 验证 分 析 ,结 果 表 明该 摄像 头 驱动 运 行稳 定 ,对 其 获得 的 文字 图片进 行识 别 ,测试 结果 显 示 识 别 率 达到 99.5%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所属的 U B设备工作组负责 ,对象是所有传输视 S 频流的设备,如 P C摄像头 、视频摄像机/ 录像机 、 媒体转换 器 以及 电视 调谐器 等。视频 的格式相 当灵 活 ,可 以是 无压缩 的 ,也 可 以是 M P G、MP G一 JE E
Ke r s e e d d;W i C y wo d : mb d e n E; c me a d ie ; U B vd o s cf ain a r rv r S e p i c t i e i o
1 引 言
WiC . n E 5 0是 一个 3 2位 、多 任务 、多 线程 的 实时嵌 入式 操 作 系 统 。U B摄 像 头 以其 良好 的性 S
124或 D ( // V 包含元数据 ) 格式 。在 这个新 规范 中 , 设 备都被看 作是终端 和单 元 。终端 是指数据 源 ,如
C D C S感 应 器 、液 晶显 示 器 、存 储 设 备 等 ; C / MO 单元 是指担 当逻辑 传输或数 据路 由的设备 ,如输 人
提 供 了 一 些 底 层 支 持 ,摄 像 头 厂 商 尚 未 提 供 WiC 5 0下 U B摄像头 的驱动 ,而且现有 的很 多 n E. S 摄像头都依 赖 于摄 像头 的硬件 ,一种 驱动 只支 持一
・
6 6・
实 验 科 学 与 技 术
21 0O年 2月
基 于嵌 入 式 WiC n E的 U B摄 像 头驱 动开 发 S
张 禾 ,高凤水
60 0 ) 15 0 ( 西南石油大学电子信息工程学院 ,成都
摘要 :介 绍了 U B视 频规 范,给 出WiC S n E环境 下 U B摄像 头驱动模 块的层 次结构以及摄像 头驱动 的开发 流程。文章主要 S 对摄像 头驱动 中的重点函数进行 了分析介绍,最后将该驱动移植到 了 WiC n E嵌入 式操作 系统上 ,并在 P A 7 X 2 0硬件 平台下 进行 了测试。在 实验葙上使 用罗技快看 Po50 r 00和快看 S50 50两种型号的摄像头 ,测试成功。结果表明该文编 写的驱动符
De eo m e to B Ca e a Drv r Ba e n Emb d e i CE v l p n fUS m r i e s d o e d dW n
ZHANG He, GAO e g s u F n —h i ( oeeo l t n n no tnE gne n ,Su w s Pt l m U i rt,C egu 50,C ia C l g f e r i a dIfr i ni r g ot et e o u n esy hnd 5 00 l E co c mao ei h re v i 1 hn )
合 U B视 频 规 范 。不依 赖 于摄像 头 的硬 件 ,适 用于 所有 符 合 U B视 频 规 范 的摄 像 头 。 S S 关 键 词 :嵌 入 式 ;Wi E操 作 系统 ;摄像 头驱 动 ;U B视 频规 范 nC S 文 献 标 识 码 :B 文 章编 号 :17 45 (0 0 0 06 6 2— 5 0 2 1 )1— 06一o 3 中 图分 类 号 :T 3 P7
te d ie c od i h B v d o c t r n, a d d p n s o e c me as f a e h s t ss i b e f r l t ee le l , w ih h r ra c r s w t t e US i e r e o v h i i n e d n t a r o t r .T u ,i i u t l o l h an H¥ e h w a a hc a r e i e s cf a o . g e sw t t p i c t n hh e i i
P A 7 ]f ̄ O eseedi t tg r e y un o o ehQ i Cm Po 00adS 50c ea.T er u s hwt t X 2 0p o a n ee sn d vr ig t Lgt u k a r5 0 50 a r u ne i i b s b h c c n m s h sl o a e ts h
规范 ,本 文编写 ຫໍສະໝຸດ 驱 动程序适用 于罗技 系列 的所有
摄像头 。采用 P A 7 X 2 0为实验 的硬件平 台 。
2 U B视频 规 范 S
U B视频类 规范是 一个 新 的标准 ,由 U B—I S S F
能和低廉 的价格得到 了广泛的应用。同时 因其灵 活 、方便 的特性 ,易于集 成到嵌人式 系统 中。 采用 U B摄像头可以在 Wi E操作系统下方 S n C 便地 得到实 时 图像 ¨ ’。但 是 由于嵌人 式硬 件环境 一j
Ab t a t T i a e t d c d te he a c ia tu tr fU B c me a di e d ue a ela h e eo me tpo e s o a sr c : hs p p ri r u e h ir r hc lsr cu e o S a r r r no v mo l , s w l st e d v lp n rc s fC m- e ad ie s h i u ci n h rv r W n ls d Fn l , t e d v r Wa mb d e n o eai g s se a d tse n t e r r r .T e man f n t o t e d ie a a ay e . i a y h r e s e e d d i p r t y tm n e td i v of s l i n h