康奈尔大学水下机器人
国产水下机器人如何圆梦夺冠
79国产水下机器人如何圆梦夺冠本刊记者/王志刚(见习)北京时间2018年8月6日,历时7天的第21届RoboSub国际水下机器人竞赛在美国圣迭戈落幕,由哈尔滨工程大学刘文智教授指导的学生团队赢得本届冠军。
如果说将国际水下机器人竞赛比作全球水下机器人的“奥运会”,那么这次哈尔滨工程大学的夺冠无异于1984年许海峰(“中国奥运金牌第一人”)夺冠,实现了相关领域“零的突破”。
这则消息让人备感振奋。
稳中求胜“按理说去年我们至少应该能够拿到亚军!”刘文智半开玩笑地说,“由于我们学校(原中国人民解放军军事工程学院)的特殊性,美国不给我们发签证,2017年只能让四名学生单独去参赛。
”事实上,早在2010年时,刘文智带领的E唯代表队就因没有签证而不能赴赛。
2018年8月1日,刘文智和其他几位带队老师仍在国内。
没有签证,面对太平洋,刘文智举步难行。
与此同时,大洋的另一面,第21届RoboSub国际水下机器竞赛已经开赛第二天。
而有惊无险,这一天刘文智等到了难得的美国签证,带着团队即刻飞往了美国。
抵达比赛现场,领到参赛证件之后,学生们迅速来到比赛位置,在工作人员配合下,开始对机器人的导航、控制、识别等各项系统进行逐一调试。
“幸运的是,赛前的签证风波并未对学生造成影响。
”事后刘文智回忆说,但由于环境变化,机器人却显得不淡定了。
在调试中,机器人原本通过传感器进行水下定位识别的路径严重跑偏。
刘文智用东北味十足的话开玩笑说:“相应情况在家(指哈尔滨工程大学)都有预料,可没想到会那么严重。
”面对严重的硬件问题,赛场上显然没有可替换的设备,因此,刘文智与守在电脑旁的学生思虑片刻,转换思路,决定通过软件方法来解决硬件问题。
于是放弃原有的传感器程序设定,改用声导航系统进行测试。
像半路杀出个程咬金,刘文智的E唯代表队在预赛中以第一名的成绩有惊无险地闯入决赛。
决赛时,透过清亮泛着淡蓝的池水,刘文智发现有好几次明明有待识别物,国外的机器人却没能抓住。
水下机器人推进系统综述

水下机器人推进系统综述水下机器人是一种在水下进行任务的无人机器人系统,它可以应用于海洋科学研究、水下勘探、深海探测、水下维修等领域。
水下机器人的推进系统是其最关键的部件之一,它直接影响到水下机器人的性能和运行能力。
本文将对水下机器人推进系统进行综述,包括水下机器人推进系统的类型、工作原理、发展现状及未来发展方向等内容,以期为水下机器人的研究和应用提供参考。
水下机器人推进系统通常可以分为螺旋桨推进系统、水下喷射推进系统和水下旋翼推进系统三种类型。
螺旋桨推进系统是最常见的水下机器人推进系统,它通过螺旋桨的旋转来产生推进力,实现水下机器人的运动。
水下喷射推进系统则是通过喷射高压水流来产生推进力,从而推动水下机器人进行运动。
水下旋翼推进系统则类似于直升机的工作原理,通过旋翼的旋转来产生推进力,实现水下机器人的运动。
二、水下机器人推进系统的工作原理目前,水下机器人推进系统的发展已经取得了一定的成就,各种类型的推进系统在水下机器人中得到了广泛的应用。
螺旋桨推进系统因其简单、稳定、高效的特点,是目前应用最广泛的水下机器人推进系统。
水下喷射推进系统由于其高速、灵活、可在狭窄空间中操作的特点,得到了在水下作业、水下勘探和水下搜救等领域的广泛应用。
水下旋翼推进系统则因其可以实现多方向的自由运动,目前在水下机器人中也得到了一定程度的应用。
随着水下机器人应用领域的不断拓展和水下任务需求的增加,水下机器人推进系统也需要不断进行创新和改进。
未来,水下机器人推进系统的发展方向可能包括以下几个方面:首先是推进系统的高效性和节能性,可以通过提高推进系统的效率和降低能源消耗,实现水下机器人的长时间工作和远距离行驶。
其次是推进系统的智能化和自主化,可以通过引入智能控制算法和传感器技术,实现水下机器人的智能导航、避障和自主作业。
推进系统的多样化和模块化也将成为未来的发展趋势,可以通过多种推进系统的组合和模块化设计,实现水下机器人在不同任务中的灵活应用和快速转换。
水下机器人调查报告
水下机器人调查报告水下机器人是一种能够在水下执行各种任务的自主机器人。
水下机器人主要应用于水下勘探、科学研究、资源开发、军事侦察等领域,具有安全、高效、可靠等优点。
本报告将对水下机器人进行调查研究,探讨其工作原理、应用领域、市场现状等方面。
一、工作原理水下机器人是由控制系统、动力装置、传感系统、通讯设备、操纵系统等组成,一般包括舵机、水下推进器、电机、电池等。
水下机器人的动力装置一般采用电池供电,可以通过有线或无线遥控控制机器人的运动、姿态和动作。
水下机器人的传感系统主要包括水压传感器、声纳、摄像头和操纵臂等,可以在水下进行物体探测、导航、测量和采样等操作。
通讯设备主要有无线电和光缆通讯。
水下机器人的操纵系统一般包括手持遥控器、计算机和虚拟现实设备等,可以对机器人进行实时控制和监测。
二、应用领域水下机器人主要应用于以下领域:1.水下勘探:水下机器人可以在海底进行勘探,可以采集水下矿产资源、进行水下地质勘探和地形图绘制等任务。
2.海洋科学研究:水下机器人可以进行海洋环境监测、海洋生物学研究、海洋地质学研究、海洋气象学研究等,可以帮助科学家更好地探索海洋深处。
3.水下建筑和维修:水下机器人可以在水下进行油田开发、海底管线维修和设施建设等操作,可以大大提高操作效率和安全性。
4.军事侦察:水下机器人可以进行海上侦察、水下侦察和水道侦察等任务,可以在战场上发挥非常重要的作用。
5.水下娱乐:水下机器人可以用来拍摄水下景观、探索水下遗址等,也可以成为水下活动的一种新体验。
三、市场现状在水下机器人市场上,欧美国家是主要生产厂家,其次是亚洲国家,如中国、日本等。
目前,水下机器人市场呈现出稳步增长的态势。
据市场研究机构预测,到2025年,全球水下机器人市场规模将达到46亿美元。
在市场上,目前主要的产品是观测器、仿人机器人和自主水下机器人。
随着水下机器人技术的不断发展和市场需求的增长,未来市场前景广阔。
总之,水下机器人作为一种新兴技术应用,为我们探索海洋深处、开发海洋资源等提供了新的手段和保障,未来将在多个领域得到广泛的应用。
3500米水下取样型机器人(ROV)研制成功
3500米水下取样型机器人(ROV)研制成功
佚名
【期刊名称】《实验室研究与探索》
【年(卷),期】2008(27)8
【总页数】2页(PI0001-I0002)
【关键词】水下工程;机器人;取样;中国南海;上海交通大学;遥控潜水器;实验室研制;科学考察
【正文语种】中文
【中图分类】U673.33;TP242
【相关文献】
1.3500米水下取样机器人(ROV)研制成功 [J], 上海交大水下工程研究所实验室
2.观察型水下机器人ROV系统配置研究 [J], 桑金
3.遥控水下机器人(ROV)结构综述——以hysub130—4000ROV系统为例 [J], 陈宗恒;盛堰;陶军
4.浅谈重载工作型水下机器人(ROV)海试验收方法 [J], 蒋喻栓; 陆予洋
5.基于水下机器人ROV的水平方向地质取样工具设计与研究 [J], 徐亚国
因版权原因,仅展示原文概要,查看原文内容请购买。
水下机器人技术的研究进展与应用前景
水下机器人技术的研究进展与应用前景随着科技的不断发展,水下机器人技术逐渐被人们所重视,成为现代海洋科学研究领域中的重要分支。
水下机器人不仅能够在水下环境中进行高效准确的勘测、调查和观测,还能够在海洋资源开发、海底救援等领域发挥重要作用。
本文旨在对水下机器人技术的研究进展与应用前景进行探讨。
一、水下机器人技术研究进展近年来,水下机器人技术发展迅速,涉及机械、电子、航空航天、计算机、通讯等多个领域。
以下是一些水下机器人技术领域中的重要进展:1、水下机器人控制技术:控制技术是水下机器人技术的核心,如何使机器人在复杂的水下环境中高效准确地控制、运动成为了技术研究人员努力的方向之一。
现在,水下机器人控制技术在传感器技术、导航技术、作业策略等方面都得到了显著提高。
2、水下图像与声学技术:水下图像与声学技术在水下机器人领域中起着非常重要的作用。
水下机器人能够利用声纳、激光、光学及其他传感器等检测设备实时获取海底地形和天然水文条件的各种资料,并实时回传,这些资料可以广泛应用于海洋科学、海洋资源勘探等领域中。
3、水下机器人动力技术:水下机器人的动力技术不仅涉及到如何达到良好的作业速度和机动性,还需要保证机器人在竞争激烈的市场中可以实现更长的使用寿命。
因此,水下机器人动力技术是水下机器人技术中的一项关键技术之一。
4、水下机器人一体化技术:水下机器人的一体化技术是将各种技术有效的集成在一起,以便提高机器人的使用效率。
水下机器人一体化技术涉及到多学科交叉,例如机械、电子、通信等领域,研究难度较大,但对于水下机器人技术的发展具有非常重要的意义。
二、水下机器人应用前景展望水下机器人技术的不断发展,带来了广泛的应用前景。
以下是水下机器人在相关领域中的应用前景展望:1、海洋资源开发应用前景:水下机器人可以应用于海洋资源开发中,例如石油、天然气或矿产资源的开采、沉船打捞等领域。
未来随着深海开采技术的不断提高,水下机器人的发展将在海洋资源开发中起到更加重要的作用。
一文了解康奈尔大学机械手臂发展史
一文了解康奈尔大学机械手臂发展史
机器手的目标是全方位的接近人手,并且超过人类,比如给人类按个按摩啦,捏个肩,捶个背啦,如果大家看过生活大爆炸的话,应该会记得第四季,霍华德给NASA 做的机器手被他用来做了不可言喻的事。
本月18号英国的《每日邮报》报道,这次康奈尔大学在速度上又提升了一个档次,机器手的反应速度这里我们简称为“手速”吧,提升到近乎和人手相同了!不用我提醒你,各位看官老爷也应该知道“手速”的重要性吧。
闲话不多说了,各位先看一下这张动图感受一下它的“手速”。
可以看出,该机械手臂的反应速度相当快,研究人员将该机器手打造的非常灵活,从反应来看与人类反应对比可以说是有过之而无不及。
从他们试验所用到的啤酒瓶子可以看出,这只手不光反应速度很快,而且力量也不小,当然我们不希望它在做某些事的时候力量过大受伤了怎么办。
玩笑归玩笑简单给大家说一下,这只机器手的秘密在于其内部的“传动”装置。
它的传动机构设计比较简单,它实际上是一个“肌腱”包裹着的圆柱形的线轴,而线轴则由一种灵活的材料构成,使它可以扩展变宽,从而更好地控制速度和力量。
“肌腱”松开,圆柱体变宽,移动更快;“肌腱”收缩,圆柱体变薄,强度加大。
这种传动是由指尖能检测物体力量及物体间距离的传感器触发。
研究人员把传动装置称为弹性被动传输(EPT),制造这种装置的成本价格在500美元,但是好处是这种传功装置可以通过3D打印完成,很方便,材料便宜,价格低廉。
但是,官方表示,这种机器手价格则超过1万美元。
嗯,一万美元
说到这,不得不提一下康奈尔大学的机械手臂发展,其实这不是康纳大学研发的机械手臂。
水下机器人的研究和应用

水下机器人的研究和应用第一章:水下机器人的概述水下机器人是一种能够在水下进行探测、勘探、观测和作业的自主或遥控机器人。
它可以在水下环境中执行复杂的任务,如水下油气开采、海洋普查、深海探索等。
水下机器人主要有两类:一类是有人操控的大型水下机器人,另一类是无人操控的自主水下机器人。
第二章:水下机器人的结构和原理1. 结构水下机器人由三个部分组成:操控系统、电力系统和动力系统。
其中操控系统是水下机器人最重要的部分,通过无线电或光缆控制机器人的动作和数据传输。
电力系统则为机器人提供动力,常用的电力系统是潜水艇蓄电池、燃油电池和太阳能电池。
动力系统是机器人在水下环境中进行移动的关键,通常采用液压系统、电力推进器或透平推进器。
2. 原理水下机器人的工作原理主要是利用电信号、机械运动和水体浮力等基本原理实现自主或遥控。
操纵杆和摇杆控制着机器人的运动,一些传感器可以为机器人提供环境感知和导航信息。
水下机器人还可以通过声纳、光学相机等设备获取海洋环境的相关信息,实现对海洋生物和水下物体进行观察和勘探。
第三章:水下机器人的应用1. 水下勘探水下机器人可以在水下进行各种勘探活动,包括海底地形测量、潜水遗骸勘探、海洋生物调查等。
目前,国内外有许多机构和公司在水下勘探方面开展了大量的研究和应用工作。
2. 水下作业水下机器人还可以用于海底资源开采、海洋工程施工、船只维修等作业任务。
例如,可以通过水下机器人进行海底管道铺设、岩石开采、船只拯救等。
3. 海洋环境监测水下机器人可以通过搭载各种传感器,对海洋环境进行监测与测试。
它可以对海洋水质、海底地质、气候变化、海洋生物等方面进行研究,从而为海洋环境的保护和可持续发展提供科学依据。
第四章:水下机器人的发展前景水下机器人具有广泛的应用前景,在未来的勘探、作业和科学研究中将发挥越来越重要的作用。
预计未来,水下机器人将会呈现出以下几个方面的发展趋势:1. 自主化程度将会提高。
2. 远程遥控技术将会得到改善和提升。
水下球形机器人的运动控制

汇报人: 2023-12-28
目录
• 水下球形机器人概述 • 水下球形机器人的运动原理 • 水下球形机器人的控制系统 • 水下球形机器人的实验与验证 • 水下球形机器人的未来展望
01
水下球形机器人概述
定义与特点
定义
水下球形机器人是一种能够在水 下环境中自主或遥控操作的球形 机器人,具有独特的球形外观和 内部结构。
稳定性
在实验过程中,机器人表现出 良好的稳定性,能够在不同水 深和水流条件下稳定运行。
续航能力
经过多次实验验证,水下球形 机器人的续航能力达到XX小时
以上,满足实际应用需求。
验证与改进
通过实验验证了水下球形机器人 的运动控制效果,证明了其在真 实水下环境中的可行性和实用性
。
根据实验结果,对机器人的结构 和控制系统进行了优化改进,提
用于监测机器人运动状态和周 围环境信息,如深度、速度、
方向等。
动力系统
为机器人提供动力,使其能够 在水中自由移动。
实验方法与步骤
1. 准备实验设备
检查水池、控制系统、传感器和动力系统 是否正常工作。
5. 分析实验结果
根据记录的数据分析机器人的运动性能和 效果。
2. 安装机器人
将水下球形机器人放入水池中,并连接控 制系统和传感器。
海洋救援与打捞
水下球形机器人可用于搜寻失踪人员、打捞沉船和遗物等任务,为 救援工作提供有力支持。
面临的挑战与解决方案
技术难题
01
水下球形机器人在运动控制、导航定位等方面仍面临技术挑战
,需要不断探索和创新解决方案。
环境适应性
02
水下球形机器人需要适应复杂多变的水下环境,包括水流、压
水下机器人视觉感知与控制技术研究
水下机器人视觉感知与控制技术研究随着海洋资源的逐渐开发,水下机器人在海洋探测、海洋科学研究和海洋工程中的应用越来越广泛。
水下机器人能够进行深海探测、海底工作、水下勘探等操作,但是在水下环境中,由于光线传输性质的限制和水下环境的复杂性,其视觉感知和定位的能力受到了很大的限制,这也成为了水下机器人技术研究中亟待解决的问题。
水下机器人视觉感知与控制技术是水下机器人技术中最为关键的一部分。
要使水下机器人能够准确地感知和理解周围环境的信息,并进行跟踪和定位,就需要先解决水下环境对机器人视觉的限制。
在水下环境下,水质作为一种难以控制的传输媒介会削弱光线传输的能力,导致所接收的光信号强度较弱,光学系统的分辨率也会变低。
此外,水下环境中散射、折射和吸收等现象也会影响水下机器人对目标物体的视觉感知和跟踪。
因此,水下机器人视觉感知和跟踪的诸多问题需要采用新技术和手段来解决。
较早的水下视觉感知技术主要是利用声纳进行目标探测和跟踪,但是其精度和分辨率都有限,且对水下环境的干扰较大,难以精准地测量目标的位置和速度。
直至近几年,水下机器人技术得到了快速发展,大量涌现出适用于水下感知的技术手段和算法。
其中较常用的是电视摄像头作为主要传感器来进行视觉感知。
水下电视摄像头可以通过红外、激光等光源进行辅助照明,并且能够实时反馈水下目标的颜色、形态、距离、大小等信息,但是水下图像的颜色、对比度和清晰度均受到水质的影响,因此水下电视摄像头多采用高灵敏度、低光降噪等技术手段。
为解决水下环境对机器视觉的限制,研究者们提出了多种水下图像处理技术和算法。
其中,较为常见的包括光线适应滤波算法、显示颜色增强算法、多尺度分割技术、快速建模和识别算法等。
这些算法主要针对水下图像的消失效应、颜色偏差、噪声和模糊等问题,从而提高机器人的视觉感知精度。
例如,光线适应滤波算法可以对图像的颜色和亮度进行合理调整,显示颜色增强算法则能够增强水下图像的色彩对比度和清晰度,而多尺度分割技术则能够区分图像中的目标和背景,从而提高机器人目标跟踪和定位的精度。
基于人工智能的水下机器人智能控制
基于人工智能的水下机器人智能控制在科技飞速发展的今天,水下机器人已经成为探索海洋世界的重要工具。
而基于人工智能的水下机器人智能控制技术,更是为这一领域带来了前所未有的突破和变革。
想象一下,在深邃神秘的海底世界,水下机器人能够自主地感知周围环境、灵活地避开障碍、精准地执行任务,这一切都离不开智能控制技术的支持。
那么,究竟什么是基于人工智能的水下机器人智能控制呢?简单来说,它是将人工智能的理念和方法应用到水下机器人的控制中,使机器人具备类似人类的思考和决策能力。
传统的水下机器人控制方式往往依赖于预设的程序和指令,灵活性和适应性较差。
而人工智能的引入,则为水下机器人注入了“智慧的灵魂”。
要实现水下机器人的智能控制,首先得解决感知问题。
就像我们人类依靠眼睛、耳朵等感官来感知世界一样,水下机器人也需要各种传感器来获取周围环境的信息。
这些传感器包括声纳、摄像头、压力传感器等等。
通过这些传感器,水下机器人能够感知到海底的地形、水流的速度和方向、周围物体的位置和形状等。
然而,仅仅获取信息还不够,还需要对这些信息进行有效的处理和分析。
这就涉及到数据融合和特征提取等技术。
不同的传感器获取到的信息可能是多样且复杂的,需要将它们整合起来,提取出有用的特征,以便机器人能够做出准确的判断和决策。
在智能控制中,机器学习算法起着至关重要的作用。
例如,深度学习算法可以让水下机器人通过大量的数据学习,从而识别不同的物体和场景。
强化学习算法则可以帮助机器人在不断的尝试和错误中,找到最优的行动策略。
有了感知、处理和学习的能力,水下机器人就能够实现自主导航和避障。
在复杂的海底环境中,机器人能够根据实时获取的信息,规划出最优的路径,避开各种障碍物,安全地到达目标地点。
除了自主导航和避障,智能控制还能够让水下机器人完成更加复杂的任务,比如海底资源的勘探和开采、海洋生态环境的监测、水下设施的维护和检修等。
在进行这些任务时,机器人需要根据不同的情况做出灵活的决策,调整自身的动作和行为。
水下机器人的开发与应用

水下机器人的开发与应用水下机器人,又称潜水机器人、水下机器人、深海机器人等,是一种具备自主行动和操作能力的机器人,能够在水下环境中进行各种工作、探测和勘探等操作。
水下机器人的开发与应用已成为当今科技发展的重要领域,具有广阔的应用前景。
一、水下机器人的开发历程水下机器人的开发历程可以追溯到20世纪50年代,当时美国海军研究部门开始开发水下机器人,用于海底勘探和军事任务,这些机器人主要由电池和电机组成,通过遥控器控制水下机器人的运动和操作。
随着科技的发展和技术的进步,水下机器人的结构和功能不断完善。
20世纪80年代初,美国的Alvin号水下机器人成功完成了深海勘探任务,并发现了生物多样性和热水喷口等重要信息,这标志着水下机器人应用的进一步扩展。
现在,世界各国正在着力开发更先进的水下机器人,旨在满足不同领域的需求。
二、水下机器人的应用领域1.海洋科学研究水下机器人可以在海洋深处进行特殊探测和勘察,深海探测器可以帮助科学家们研究深海环境,发现新物种,为人类认识海洋做出贡献。
此外,水下机器人还可以进行海洋资源搜寻和勘探,拓宽海洋领域的经济利用。
2.水下工程施工水下机器人可以在水下进行施工和维护工作,如:海底管线、石油钻探、堤坝维修等。
水下机器人在水下环境中具有更好的适应性和灵活性,能够高效地完成各种维护和安装工作。
3.水下搜索和救援水下机器人可以通过声纳等技术远程探测水下情况,帮助搜救人员进行搜救工作。
此外,在海难、飞机失事等事故中,水下机器人可以帮助搜救人员探测事故记录器。
4.科学普及和娱乐体验随着科技的不断发展和人们科学意识的提高,水下机器人已经成为科学普及和娱乐体验的新选择。
如:水下机器人科普馆、水下机器人游戏等。
三、水下机器人应用现状随着水下机器人技术的发展和应用扩大,在海洋资源利用、工程施工、科学研究等各个领域出现了广泛的应用。
在国内,中国水下机器人技术不断突破,虎鲸号水下机器人和深潜者号水下机器人等具有自主导航和样品采集等多项技术优势。
水下机器人毕业设计英语

水下机器人毕业设计英语Underwater Robotics: A Comprehensive Guide for Senior Design Projects.Introduction.Underwater robotics, a captivating andinterdisciplinary field, presents a wealth of opportunities for senior design projects. With its diverse applications in ocean exploration, marine science, and industry, it offers students an unparalleled platform to showcase their creativity and technical prowess. This comprehensive guide will provide an in-depth exploration of the key aspects of underwater robotics, equipping students with the knowledge and understanding necessary to embark on successful senior design projects in this exciting field.Applications of Underwater Robotics.Underwater robotics encompasses a vast range ofapplications, each posing unique design challenges and requiring specialized knowledge. These applications include:Ocean Exploration: Exploring the depths of the ocean, mapping underwater landscapes, and studying marine ecosystems.Marine Science: Conducting scientific research, monitoring environmental changes, and studying marine life.Industry: Inspecting underwater structures, performing maintenance tasks, and exploiting subsea resources.Military: Deploying underwater vehicles for surveillance, reconnaissance, and combat operations.Key Considerations for Senior Design Projects.When embarking on an underwater robotics senior design project, it is crucial to consider several key factors:Vehicle Design: Determine the type of vehicle (ROV,AUV, or hybrid), its size, shape, and propulsion system.Control Systems: Design and implement control algorithms for navigation, positioning, and manipulation.Sensing and Perception: Integrate sensors for obstacle avoidance, object detection, and environmental monitoring.Communication and Data Transmission: Establishreliable underwater communication channels and develop protocols for data transmission.Materials and Fabrication: Select appropriate materials and fabrication methods to ensure the vehicle's durability and performance in the underwater environment.Design Process and Methodology.The design process for an underwater robotics project typically involves the following steps:Problem Definition: Define the project objectives andidentify the design constraints.Concept Generation: Explore various design concepts and evaluate their feasibility.Detailed Design: Develop detailed plans and specifications for the vehicle's components and systems.Fabrication and Assembly: Physically construct the vehicle and integrate all its components.Testing and Evaluation: Conduct thorough testing to verify the vehicle's functionality and performance.Common Challenges and Troubleshooting.Underwater robotics projects often encounter various challenges, including:Harsh Environment: Dealing with extreme pressure, temperature, and salinity levels.Limited Visibility: Operating in low or zerovisibility conditions.Communication Difficulties: Establishing reliable underwater communication links.Mechanical Failures: Ensuring the robustness and reliability of vehicle components.Power Management: Optimizing energy consumption and managing battery life.Troubleshooting these challenges requires a systematic approach, involving thorough analysis, testing, and iterative design modifications.Conclusion.Underwater robotics presents an exciting and rewarding field for senior design projects. By understanding the key applications, design considerations, design process, and common challenges, students are well-equipped to embark oninnovative and successful projects. With its potential to advance scientific discovery, industry practices, and societal progress, underwater robotics promises to continue captivating the minds of future engineers and researchers.。
深海探索:水下机器人的技术进展

深海探索:水下机器人的技术进展深海,蕴藏着无尽的神秘和未知,吸引着人类的探索欲望。
然而,深海环境的极端条件和压力,使得人类无法直接深入其中进行探索。
在这样的背景下,水下机器人成为了深海探索的重要工具。
随着科技的不断进步,水下机器人的技术也在不断发展和完善,为人类揭开深海的神秘面纱提供了强大的支持。
本文将就水下机器人的技术进展进行探讨。
一、水下机器人的发展历程水下机器人的发展可以追溯到20世纪60年代,当时美国海军开始研制水下无人潜水器,用于进行海底勘探和军事侦察。
随着科技的不断进步,水下机器人的功能和性能得到了极大的提升。
现如今,水下机器人已经广泛应用于海洋科学研究、海底资源勘探、海底考古等领域,成为深海探索的重要工具。
二、水下机器人的技术特点1. 深海适应性强:水下机器人能够适应深海极端的环境条件,如高压、低温等,能够在深海中稳定运行并完成各项任务。
2. 多功能性强:水下机器人具有多种传感器和执行器,可以完成各种复杂的任务,如采集样本、拍摄视频、进行水下修复等。
3. 操控灵活:水下机器人可以通过遥控或预设程序进行操控,能够在不同的任务环境下灵活应对。
4. 数据传输高效:水下机器人可以通过搭载的通讯设备将采集到的数据实时传输至地面控制中心,为科研人员提供及时的信息反馈。
三、水下机器人的应用领域1. 海洋科学研究:水下机器人可以深入海底进行海洋生物调查、海洋地质勘探等科学研究工作,为海洋科学领域提供重要数据支持。
2. 海底资源勘探:水下机器人可以在深海中进行矿产资源、石油天然气等资源的勘探工作,为资源开发提供技术支持。
3. 海底考古:水下机器人可以在海底进行考古勘探工作,寻找沉船遗迹、古代文明遗址等,为人类历史研究提供重要线索。
4. 海底环境监测:水下机器人可以监测海洋环境的变化,如海水温度、盐度、酸碱度等参数,为海洋环境保护提供数据支持。
四、水下机器人的技术进展1. 智能化:随着人工智能技术的发展,水下机器人的智能化水平不断提高,能够自主规划路径、避障等,提高了工作效率和安全性。
水下机器人技术研究综述
水下机器人技术研究综述随着科技的不断发展,水下机器人技术得到了不断的挑战和发展。
水下机器人作为一种特殊的智能机器人,是一种通过电信技术完全控制的自主的无人机器人。
它们可以在水下环境下执行不同的任务和操作,例如勘探、监测、救援等。
水下机器人技术在海洋开发、海洋勘探、海洋军事和科学研究等方面都有着广泛的应用和前景。
本文将对当前水下机器人技术的研究动向和应用现状进行综述。
一、水下机器人的分类水下机器人的分类可以根据其功能、形状、动力来源等方面进行分类。
按功能分:水下机器人可以分为勘探机器人、监控机器人、作业机器人和救援机器人。
按形状分:水下机器人可以分为鱼形机器人、球形机器人、蛇形机器人、螺旋桨机器人等。
按动力来源分:水下机器人可以分为自主动力、人工动力、太阳能动力等。
二、水下机器人技术的研究现状1. 水下视觉技术水下机器人的视觉技术是实现自主导航的重要手段。
目前,先进的视觉识别技术已经广泛地应用于水下机器人领域。
例如,通过使用不同的传感器和摄像机,可以实现水下深度测量、光学成像、颜色辨认和物体识别。
同时,通过水下激光传感器,可以对固定目标进行精确测量和地形辨别,为自主导航提供重要信息。
2. 水下定位技术水下机器人的定位技术是实现自主导航的另一种重要手段。
目前,GPS等传统定位技术在水下环境中不太实用,因为水下环境中信号的传播特点和障碍物的存在。
因此,更多的研究关注基于声波、磁场和惯性测量等方法的水下定位技术。
例如,通过水下声学传感器,可以测量声波传播时间和距离,从而实现水下机器人的定位。
3. 水下通信技术水下通信技术是水下机器人技术中的另一个重要方面。
由于水下环境的特殊性质,使得传统的无线通信技术无法应用于水下通信。
因此,更多的关注点在水下声波通信、蓝牙和红外线通信等方面。
通过这些通信手段,可以将机器人和地面控制中心之间的信息传输最小化,从而实现自动控制和传感。
4. 水下能源技术水下机器人能源技术也是令人关注的一个方面。
康奈尔大学水下机器人
2.7压力通道
• 为了容纳一个mini - ITX主板, Tachyon的船体为直径9.5英寸,远远超 过往年。压力容器本身后方端盖和船体装配组成,其中铝制零件由学 生团队数控加工的。悬臂式机架组件,这意味着无需断开任何电子产 品的船体可删除。船体装配幻灯片上层船体机架和队友使用与后端盖 一个孔密封。前方端盖和船体领使用3M DP- 460环氧丙烯酸船体形成 船体装配。海上CON连接器(MCBH6,MCBH- 8和MCBH- 10)和定 制的火线连接通过后部端盖提供通信接口和外部设备的电源。丙烯酸 船体额定为100英尺的深度
中国科学院沈阳自动化研究所
1、简要介绍
中国科学院沈阳自动化研究所
2、机械系统
• 超光速的机械系统包括航行器结构,压力容器,机电制动 器(图2)。所有为快子定制的机械零件使用SolidWorks 设计,并由CUAUV队员自己制造。
中国科学院沈阳自动化研究所
2.1 航行器结构
• 快子航行器框架支持压力容器,执行器,传感器。为了适应对称车辆 动态,降低了整体大小,框架比以前的航行器短。为了减少重量,以 前航行器上的许多铝制部分由ABS塑料或聚甲醛代替。
中国科学院沈阳自动化研究所
3.2 推进器机构
• 该推进器机构控制多达七个刷推进器的速度和方向。每个 推进器都有自己的保险丝和电流监控。当前制的保险丝状 态通过串行通道报告给一个独立的计算机。
中国科学院沈阳自动化研究所
3.3执行器机构
• 执行器机构是用来控制快子上所有执行器。有五个数字输 出和三个PWM输出。五个硬件数字输出可选择输出5V或 24V。这些输出中的四个用于控制两个标记下放器,鱼雷 发射器和主动采集器。3个PWM输出,目的是要为控制伺 服控制器。
水下机器人在海洋工程中的应用

水下机器人在海洋工程中的应用一、水下机器人的发展历程水下机器人是一种能够在水下环境中执行各种任务的自主机器人。
它们可以被用于海洋科学研究、海底资源勘探、海洋环境监测、海底管道维修等多个领域。
水下机器人的发展历程可以追溯到上个世纪60年代,当时美国海军开始研发水下机器人用于海洋探测和军事侦察。
随着技术的不断进步,水下机器人的功能和性能得到了极大的提升,成为海洋工程领域不可或缺的重要工具。
二、水下机器人在海洋工程中的应用1. 海底资源勘探水下机器人可以搭载各种传感器和设备,对海底地形、海洋生物、海底矿产等进行详细的勘探和调查。
通过水下机器人的高精度探测,可以帮助科研人员更好地了解海底环境,发现新的资源点,为海洋资源的开发提供重要的数据支持。
2. 海洋环境监测水下机器人可以实时监测海水的温度、盐度、浊度等参数,对海洋环境的变化进行实时监测和记录。
这对于海洋生态保护、海洋污染治理等方面具有重要意义,可以帮助人们更好地保护海洋环境,维护海洋生态平衡。
3. 海底管道维修在海底油田、海底管道等工程中,水下机器人可以承担起巡检、维修等任务。
它们可以携带各种工具和设备,对海底管道进行定期巡检和维修,保障海底管道的安全运行。
水下机器人的使用不仅提高了工作效率,还减少了人员的风险。
三、水下机器人的未来发展随着科技的不断进步,水下机器人的功能和性能将会得到进一步提升。
未来,水下机器人可能会具备更高的智能化和自主化水平,能够更好地适应复杂多变的海洋环境。
同时,水下机器人的应用领域也将会进一步扩大,涵盖更多的海洋工程领域,为人类探索海洋、保护海洋提供更多的可能性。
总的来说,水下机器人在海洋工程中的应用前景广阔,将会为海洋科学研究、海洋资源开发、海洋环境保护等领域带来更多的机遇和挑战。
随着技术的不断进步和创新,相信水下机器人将会在未来发挥越来越重要的作用,成为海洋工程领域的重要利器。
水下机器人技术的研究与应用
水下机器人技术的研究与应用水下机器人是一种具有巨大潜力的技术,在海洋探索、环境监测、海底资源开发等方面具有广阔的应用前景。
近年来,随着科技的不断进步和社会需求的不断增长,水下机器人技术的研究和应用也在不断提升和拓展。
水下机器人技术的研究主要分为机械设计、控制系统和感知系统三个方面。
在机械设计方面,水下机器人需要具备良好的防水性能、稳定性和机动性,以应对复杂的海洋环境。
此外,水下机器人的机械臂、抓取器等操作装置也需要具备高精度和高力量控制能力,以适应不同的任务需求。
控制系统是水下机器人的核心,它能够实现对机器人的精确控制和运动规划。
水下机器人的控制系统需要考虑到水下环境的特殊性,如水流、水压等因素对机器人运动的影响。
同时,水下机器人的控制系统还需要具备自主决策、避障和路径规划等功能,以完成复杂的任务,如海底勘探、海洋生物研究等。
感知系统是水下机器人获取环境信息的重要手段,它可以通过声纳、摄像头、水质传感器等设备来对水下环境进行观测和探测。
水下机器人的感知系统需要具备高分辨率、高灵敏度和低功耗的特点,以满足各种复杂的任务需求。
同时,水下机器人的感知系统还需要具备智能化的技术,如图像识别、目标跟踪等,以提高机器人的自主性和工作效率。
水下机器人技术的应用范围广泛,涉及海洋资源开发、海洋科研、环境监测等多个领域。
在海洋资源开发方面,水下机器人可以深入海底进行勘探和采集工作,帮助人们发现和开发隐藏在海底的石油、天然气等宝贵资源。
在海洋科研方面,水下机器人可以帮助科学家进行海洋生态系统研究、地质探测等工作,为人类更好地了解海洋提供数据支持。
在环境监测方面,水下机器人可以实时监测海洋的水质、气候变化、海洋污染等情况,为环境保护提供数据支持。
然而,水下机器人技术仍面临一些挑战和难题。
首先,水下机器人的能源问题仍然是一个难题,长时间的工作需要大量的能源供应,而目前的电池技术无法满足这一需求。
其次,水下机器人的自主能力有待提升,目前的水下机器人大多需要人工干预或者远程操控,无法完成复杂的任务。
水下机器人的自主识别和目标跟踪算法

水下机器人的自主识别和目标跟踪算法水下机器人作为一种特殊的机器人系统,被广泛应用于水下资源勘测、海洋科学研究、环境监测等领域。
其中,自主识别和目标跟踪是水下机器人实现任务的关键技术之一。
在水下环境中,由于水的吸收和散射,水下图像的质量较差,难以准确识别和跟踪目标。
因此,研发高效的水下机器人自主识别和目标跟踪算法具有重要的理论意义和实际应用价值。
为了解决水下机器人自主识别和目标跟踪的难题,研究者们提出了一系列创新的算法和方法。
以下将着重介绍其中一些重要的算法。
首先,传统的计算机视觉方法在水下环境中的效果较差,因此,研究者们借鉴了生物学中的启发式方法,提出了基于生物视觉的水下机器人自主识别和目标跟踪算法。
这些算法采用鱼类和海洋生物们优秀的视觉处理能力为模板,通过局部特征提取、运动分析和模式识别等技术,在水下环境中实现了较好的图像识别和目标跟踪效果。
其次,由于水下环境的复杂性,传统的图像识别和目标跟踪算法往往无法满足实际需求。
因此,研究者们开始探索新的方法和技术,如深度学习和机器学习等。
这些算法通过构建深度神经网络,并基于大量的水下图像数据进行训练,实现了对水下目标的自主识别和跟踪。
深度学习算法的出现极大地提高了水下机器人自主识别和目标跟踪的准确性和效率。
除了上述方法外,还有一些特殊的水下机器人自主识别和目标跟踪算法值得关注。
例如,一些研究者们利用声纳和激光雷达等传感器,结合图像处理技术,实现了对水下目标的三维识别和跟踪。
这些算法在水下机器人任务中起到了至关重要的作用。
随着算法的不断发展和完善,水下机器人的自主识别和目标跟踪能力得到了显著提高。
然而,目前仍然存在一些挑战和问题。
首先,水下环境的光线、水质、水流等因素对图像质量和目标检测造成了较大的影响,需要进一步研究克服这些问题。
其次,水下环境中的目标种类繁多,有时存在形状、颜色和纹理等相似的目标,需要进一步提高算法的区分度和准确性。
此外,水下机器人的能源等限制也给算法的设计和实现带来了一定的挑战。
蛋白质水下软体机器人研究
蛋白质水下软体机器人研究
作者:
来源:《科学中国人》2024年第02期
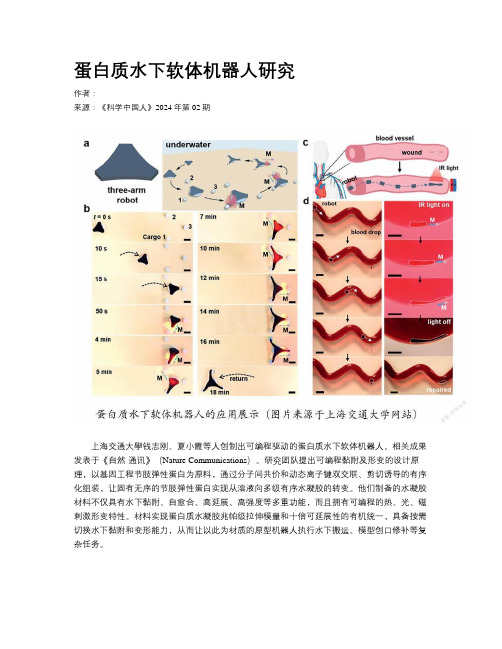
上海交通大學钱志刚、夏小霞等人创制出可编程驱动的蛋白质水下软体机器人。
相关成果发表于《自然·通讯》(Nature Communications)。
研究团队提出可编程黏附及形变的设计原理,以基因工程节肢弹性蛋白为原料,通过分子间共价和动态离子键双交联、剪切诱导的有序化组装,让固有无序的节肢弹性蛋白实现从溶液向多级有序水凝胶的转变。
他们制备的水凝胶材料不仅具有水下黏附、自愈合、高延展、高强度等多重功能,而且拥有可编程的热、光、磁刺激形变特性。
材料实现蛋白质水凝胶兆帕级拉伸模量和十倍可延展性的有机统一,具备按需切换水下黏附和变形能力,从而让以此为材质的原型机器人执行水下搬运、模型创口修补等复杂任务。
水下机器人技术在环境保护中的应用研究
水下机器人技术在环境保护中的应用研究在当今社会,环境保护已成为全球共同关注的重要议题。
随着科技的不断发展,各种创新技术被应用于环境保护领域,水下机器人技术便是其中之一。
水下机器人作为一种先进的工具,为我们更好地了解和保护水下生态环境提供了有力的支持。
水下机器人,也被称为无人遥控潜水器(ROV)或自主式水下航行器(AUV),它们能够在水下进行各种复杂的任务。
这些任务涵盖了从海洋生态系统的监测到水下污染的清理等多个方面。
在海洋生态系统的监测中,水下机器人发挥着至关重要的作用。
海洋占据了地球表面的大部分面积,其生态系统的健康状况对于整个地球的生态平衡具有深远的影响。
传统的监测方法往往受到诸多限制,例如人类潜水员的下潜深度和时间有限,而且无法覆盖广阔的海域。
水下机器人则能够克服这些限制,深入到海洋的深处,对珊瑚礁、海草床、深海热液喷口等生态系统进行详细的观测和数据采集。
通过搭载高清摄像机、传感器等设备,水下机器人可以获取高分辨率的图像和准确的环境参数,如水温、盐度、酸碱度、溶解氧含量等。
这些数据对于科学家了解海洋生态系统的结构、功能和动态变化至关重要。
除了海洋生态系统,水下机器人在淡水环境的保护中也大有用武之地。
河流、湖泊等淡水生态系统同样面临着诸多威胁,如污染、过度捕捞、水利工程建设等。
水下机器人可以对河流和湖泊的底部进行勘察,监测水质变化,查找污染源。
例如,在一些工业密集区域,工厂可能会将废水偷偷排入河流,水下机器人能够帮助监管部门发现这些非法排污口,为执法提供有力证据。
此外,对于水坝、水库等水利设施,水下机器人可以进行定期检查,及时发现潜在的安全隐患,如裂缝、渗漏等,保障水利设施的正常运行,减少对周边环境的影响。
水下机器人还在水下污染清理方面展现出巨大的潜力。
石油泄漏、垃圾倾倒等行为导致了严重的水下污染问题。
传统的清理方法效率低下,而且往往会对环境造成二次伤害。
水下机器人可以携带各种清理设备,如吸油装置、垃圾抓取器等,精准地清理污染物。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国科学院沈阳自动化研究所
2.13鱼雷发射器 鱼雷发射器
• 鱼雷发射器的功能,在车辆前方的两个发 射管。两管同时发射,由一个独立的阀门 控制。 聚氨酯鱼雷有很大的鳍,流线型的 造型,并中性浮力,导致在一个平滑的轨 迹。鱼雷由硅胶模具铸造批量生产。模具 是由数控的铝加工器生产。
2.6船身上部的压力通道 船身上部的压力通道
• Tachyon的上部船体压力容器(图6)封装了电源,串行,传感器控制 ,执行器控制的和计算机体系结构。
中国科学院沈阳自动化研究所
2.7压力通道 压力通道
• 为了容纳一个mini - ITX主板, Tachyon的船体为直径9.5英寸,远远超 过往年。压力容器本身后方端盖和船体装配组成,其中铝制零件由学 生团队数控加工的。悬臂式机架组件,这意味着无需断开任何电子产 品的船体可删除。船体装配幻灯片上层船体机架和队友使用与后端盖 一个孔密封。前方端盖和船体领使用3M DP- 460环氧丙烯酸船体形成 船体装配。海上CON连接器(MCBH6,MCBH- 8和MCBH- 10)和定 制的火线连接通过后部端盖提供通信接口和外部设备的电源。丙烯酸 船体额定为100英尺的深度
中国科学院沈阳自动化研究所
2.8 上船体架
中国科学院沈阳自动化研究所
2.8 上船体架
• 上部船体架提供安装在船体上部的电子产品。水刀切割聚甲醛舱壁分 隔的两个部分,提供6个插槽,板对板。 舱壁的设计可以改善风扇布 置和线管理。 板是以托盘安装的,使用定制的激光切割亚克力板。电 气噪声和热的组件都包含在船尾部分,在那里他们可以使用吹到铝后 端盖和船体领的散热器风扇所形成的空气循环冷却。对温度和噪音敏 感的电子器件保存在传感器控制部分的前面部分(图7)。 • 端盖接口部分所包含的内容,并管理所有在后方端盖的连接器,电线 和房屋两个风扇,以改善船尾部分冷却。 船尾部分包含计算机,光纤 板SSD,执行机构/推进器板,以及合并/ CPU发行版板。 在两个主要 部分之间,可以安装多达四个风扇。 传感器控制部分持有传感器电源 ,串行和通用输入/输出板。
中国科学院沈阳自动化研究所
3.2 推进器机构
• 该推进器机构控制多达七个刷推进器的速度和方向。每个 推进器都有自己的保险丝和电流监控。当前制的保险丝状 态通过串行通道报告给一个独立的计算机。
中国科学院沈阳自动化研究所
3.3执行器机构 执行器机构
中国科学院沈阳自动化研究所
2.1 航行器结构
中国科学院沈阳自动化研究所.2前后推进器支架 前后推进器支架
• 因为对于快子的要求是对称的控制,所有推进器对于航行器中心线对 称这一点很重要。前部推进器支架上安装了前部摇摆推进器和前部升 降推进器,还安装了前向相机外壳(图4)。前推进器安装在一个侧 面铰链,给予搬迁清理,同时仍保持船体中心线推进器的位置。船尾 推进器安装在船尾持有冻胀和尾部摇摆在中心线推进器。 它还支持开 关盒,水听器外壳和空气罐。
中国科学院沈阳自动化研究所
3.5传感器控制系统 传感器控制系统
• 为了提高传感器模块,快子包括模拟和数字的通 用输入/输出(GPIO)模块。这些电路板允许添加 更多的模拟或数字传感器,输出和执行机构。例 如:数字GPIO板的为液晶显示器提供电源,并控 制其显示航行器的任务状态
水下机器人Tachyon的设计与实现 水下机器人 的设计与实现
• • • • • • 1、简要介绍 、 2、机械系统 、 3、内部电气系统 内部电气系统 4、计算机和外设 、 5、软件 软件 6、测试 、
中国科学院沈阳自动化研究所
1、简要介绍 、
• 快子,CUAUV2009-2010年度竞赛的参赛航行器,目的是完成这工作。 快子保持了新星的可扩展通讯和电力系统,同时增加传感器的插头和 播放功能,使传感器更容易集成。为了提高竞争表现,快子将推进器 放在了中心线的位置,以确保航行器的统一动态性,一个孤立的“传 感器架”,以减少电磁干扰(EMI),和更强大的计算机,以改善视 觉处理性能。其他改进包括一个更大的有效载荷区域,一个可扩展的 通信系统,以及更紧凑的外形。快子可以用几种不同类型的执行器, 包括电磁阀和伺服系统,并且可以使用光纤或以太网系绳和岸上进行 通信。可配置和动态的任务架构允许复杂的、多线程的任务快速、简 单地自主发展。
• 气动执行机构采用压缩空气系统。 空气是存储在一个高为1000到3000 磅的压力。储气罐内置稳压降低到850磅的压力。第二个,彩弹射击 可调稳压器连接到储气罐,并进一步降低到40磅,气动工作压力的压 力。这空气,然后输送到一个定制的阀组,包含四个SMC电磁阀(图 9)。这些阀门控制执行器的控制电路板提供三个气动机制。
中国科学院沈阳自动化研究所
2.12标志器下放器 标志器下放器
• 两个标记滴管安装车辆的上部船体下方,在向下相机两侧 。他们安置的位置,确保相机能够看到下降过程。标记是 定做成黄铜和塑料,用小磁铁固定。每个标记管是由一个 独立的阀门填充的,所以标志物可以独立地被下放。他提 高翅片管设计和车辆的位置,使得新的标志物直线下放。
中国科学院沈阳自动化研究所
2.1 航行器结构
• 快子航行器框架支持压力容器,执行器,传感器。为了适应对称车辆 动态,降低了整体大小,框架比以前的航行器短。为了减少重量,以 前航行器上的许多铝制部分由ABS塑料或聚甲醛代替。 • 快子的中央结构由两个水刀ABS面组成,这两个面由铝和 ABS结构构 件和安装条(图3)连接起来。这两个面板结构为传感器,执行器和 外部压力容器,如DVL,向下摄像头,下放器标志器,采集卡的驱动 ,电池舱和水听器阵列提供了方便的内部安装。一个传感器隔离热潮 桁架坐落在框架的顶部。船体上部端盖安装在两个平行的墙面之间。 浪涌推进器安装在ABS侧板上。
中国科学院沈阳自动化研究所
1、简要介绍 、
中国科学院沈阳自动化研究所
2、机械系统 机械系统
• 超光速的机械系统包括航行器结构,压力容器,机电制动 器(图2)。所有为快子定制的机械零件使用SolidWorks 设计,并由CUAUV队员自己制造。
中国科学院沈阳自动化研究所
3.1执行器控制系统 执行器控制系统
• 执行器控制系统的控制和监视所有推进器,下放 器标志器,鱼雷发射器,以及快子上的其他主动 机电元件。它是由推进器机构,驱动器机构和开 关盒组成。该系统在执行器和推进器选择中支持 大量的模块化,可以接受辅助无刷推进器机构
中国科学院沈阳自动化研究所
2.14主动抓取器 主动抓取器
• 对于新的抓取和释放的过程组件的被动抓系统已 经更新了气动释放机制。最初的抓取机制仍然是 被动的,由机器人下部的弹簧返回鳍肢组成。当 机器人需要释放目标物,第四个阀门将空气送入 六个气缸,每边三个气缸,每个气缸有一个拥有 两个鳍状肢的管脚。空气从管脚吹出,使鳍装肢 下降。
中国科学院沈阳自动化研究所
2.9自定义连接器 自定义连接器
• 外部相机的使用需要一个新的方法将火线电缆传递到船体上部。 Tachyon已自定义干交换火线连接,使相机可以很容易地被移除(图8 )。可用于任何类型的电缆连接器设计,用于Tachyon上的火线和 JTAG连接。
中国科学院沈阳自动化研究所
2.10 执行器
• Tachyon的执行机构系统为使标志器下放,鱼雷发 射器和采集器完全重新设计了气动动力机制。 Tachyon也有6个的现成的推进器来推动车辆。
中国科学院沈阳自动化研究所
2.11空气系统 空气系统
2.16电池仓 电池仓
• 快子的电池都保存在热插拔电池仓内。每个仓有两个水下 连接器,一个用来充电另一个用来放电。 • 每个仓包含一个电池,一个荚机构和显示机构 。吊舱机构 上的各种集成电路机构允许其向快子的计算机报告电池度 量,包括容量,电压,电流和温度的同时,也通过LED显 示屏上直观地显示机构充电情况和剩余的电量。
• 执行器机构是用来控制快子上所有执行器。有五个数字输 出和三个PWM输出。五个硬件数字输出可选择输出5V或 24V。这些输出中的四个用于控制两个标记下放器,鱼雷 发射器和主动采集器。3个PWM输出,目的是要为控制伺 服控制器。 • 每个数字输出可以单独驱动,三个舵机的位置可以单独更 新。这个机构会通过一个独立的RS232线将KILL状态、每 个伺服电动机的电流消耗和综合状态传输给计算机。
中国科学院沈阳自动化研究所
2.3覆盖 覆盖
• 为了呈现出更为流体力学轮廓,超光速采 用了一系列丙烯酸制的上侧板和盖子。这 也笼罩保护水听器的元素和其他传感器。
中国科学院沈阳自动化研究所
2.4传感器架 传感器架
• 快子将其惯性测量装置、罗盘远离推进器 和执行器在一个单独的外壳,以隔离电磁 干扰。该传感器架设计成是一种非金属压 力容器用来以保持磁性的透明度。信号和 功率通过两个HUMK5 SEA CON连接器传 递到主要压力容器。
中国科学院沈阳自动化研究所
3、内部电气系统 内部电气系统
• 电气系统包括所有电源,串行,传感器和执行器控制子系 统。电力系统今年的目标包括减少功耗,提高隔离,并增 加传感器管理设备安装以及配置的能力。 • 在选择电路机构组件,特别是发光二极管时考虑功耗,降 低少每块机构的功率损耗。降低了功耗,从而在相同的运 行时间与更强大的计算机使用相同的电池了。
中国科学院沈阳自动化研究所
4、计算机和外设 、
• 计算机
• 超光速的机载计算机是由一个瑞传科技WADE -8067嵌入 式迷你ITX主板,英特尔的Core 2 Extreme QX9300四核心 处理器,4GB内存,以及英特尔X25- E极致固态驱动电源 。 • 这为所有的使命、机器视觉和控制处理任务提供了足够的 计算能力。一个PCI 快速扩充卡是用来为航行器的摄像机 提供三个火线端口。计算机运行的Debian GNU/ Linux的简 约安装。与所有外部传感器和执行器模块的通信通过自定 义串行接口模块进行路由