实验三 单片机工业顺序控制
《单片机原理及接口技术》课程实验大纲

《单片机原理及接口技术》课程实验大纲课程名称:《单片机原理及接口技术》实验英文名称:《MCU principles and interface technologies》experiment课程性质:专业选修课程课程编号:0510085所属系部:机电工程学院总学时:14学时预备知识:电路、数字电子技术课程在教学计划中的地位作用:本课程是机械电子工程专业的一门重要专业选修课程。
目前单片机技术开发和应用水平已成为一个国家工业化发展水平的标志之一。
单片机原理及其应用已成为从事电子技术的工程技术人员必须掌握的基础理论和基本技能之一。
通过本课程的学习使学生实践上掌握单片计算机的基本组成、工作原理及常用接口技术,建立单片机系统整体概念,使学生具备单片机应用系统软、硬件开发的初步能力。
教学方式:理论与实践相结合教学的目的与要求:通过本课程的学习,使学生掌握单片机的硬件结构、MCS-51的指令系统、MCS-51汇编语言程序设计、MCS-51的中断系统、MCS-51的定时器/计数器、MCS-51的串行口、MCS-51单片机扩展存储器的设计、MCS-51扩展I/O接口的设计、MCS-51 与键盘、显示器的接口设计、MCS-51单片机与D/A转换器和A/D转换器的接口、MCS-51的功率接口、MCS-51的串行通信技术及其扩展接口。
进一步理解MCS-51单片机的开发装置、工作原理、编程方法,学会使用开发机进行程序。
课程教材:《单片机原理及接口技术》蔡美琴主编高等教育出版社参考书目:1.《单片机程序设计基础》周航慈主编北京航天航空大学出版社2. 《单片机原理及其接口技术》胡汉才主编清华大学出版社编写日期:2012年6月制定课程内容及学时分配:发光二极管显示各相状态。
要求:掌握步进电机控制系统的硬件设计方法;熟悉步进电机驱动程序的设计与调试,提高单片机应用系统设计和调试的能力。
正确连接电路,编写程序,调试运行。
实验一P1口亮灯实验一、实验目的1.学习P1口的使用方法;2.学习延时子程序的编写。
单片机3
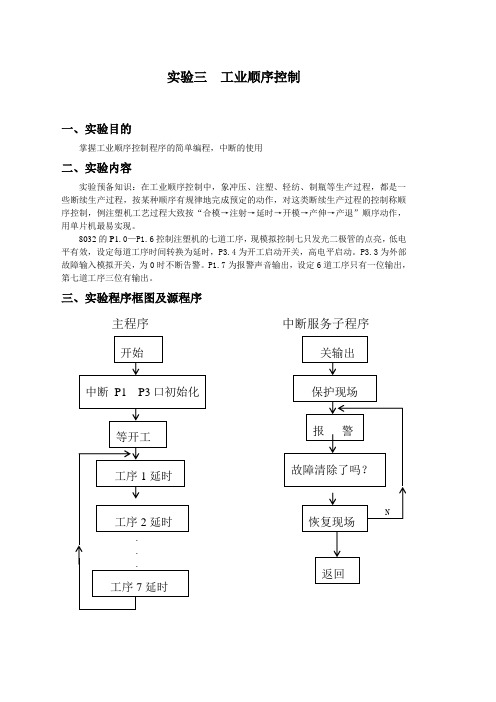
实验三工业顺序控制一、实验目的掌握工业顺序控制程序的简单编程,中断的使用二、实验内容实验预备知识:在工业顺序控制中,象冲压、注塑、轻纺、制瓶等生产过程,都是一些断续生产过程,按某种顺序有规律地完成预定的动作,对这类断续生产过程的控制称顺序控制,例注塑机工艺过程大致按“合模→注射→延时→开模→产伸→产退”顺序动作,用单片机最易实现。
8032的P1.0—P1.6控制注塑机的七道工序,现模拟控制七只发光二极管的点亮,低电平有效,设定每道工序时间转换为延时,P3.4为开工启动开关,高电平启动。
P3.3为外部故障输入模拟开关,为0时不断告警。
P1.7为报警声音输出,设定6道工序只有一位输出,第七道工序三位有输出。
三、实验程序框图及源程序主程序中断服务子程序0113 ORG 0013H 0113 0205BA LJMP HA2S3 0580 ORG 0580H 0580 7590FF HA2S: MOV P1,#07FH 0583 43B000 ORL P3,#00H 0586 30B4FD HA2S1: JNB P3.4,HA2S1 0589 43A884 ORL IE,#84H 058C 43B804 ORL IP,#04H 058F 75D000 ;MOV PSW,#00H 0592 758153 ;MOV SP,#53H 0595 7590FE HA2S2: MOV P1,#07EH 0598 B1DC ACALL HA2S7 059A 7590FD MOV P1,#07DH 059D B1DC ACALL HA2S7 059F 7590FB MOV P1,#07BH 05A2 B1DC ACALL HA2S705A4 7590F7 MOV P1,#077H 05A7 B1DC ACALL HA2S705A9 7590EF MOV P1,#0EFH 05AC B1DC ACALL HA2S705AE 7590DF MOV P1,#0BFH 05B1 B1DC ACALL HA2S705B3 7590BF MOV P1,#0BFH 05B6 B1DC ACALL HA2S705B8 80DB SJMP HA2S205BA 8AF0 MOV B,R205BC 7950FF HA2S4: MOV P1,#07FH 05BF 7520A0 MOV 20H,#0A0H 05C2 D297 HAA2S5: SETB P1.705C4 BB1D7 ACALL HA2S605C6 C297 CLR P1.705C8 B1D7 ACALL HA2S605CA D520F5 DJNZ 20H,HA2S5 05CD C297 CLR P1.705CF B1D7 ACALL HA2S605D1 30B2E8 JNB P3.2,HA2S4 05D4 AAF0 MOV R2,B05D6 32 RETI05D7 7A06 HA2S6: MOV R2,#06H05D9 B1E1 ACALL DELAY05DB 22 RET05DC 7A30 HA2S7: MOV R2,#30H05DE B1E1 ACALL DELAY05E0 22 RET05E1 C002 DELAY: PUSH 02H05E3 C002 DELAY1: PUSH 02H05E5 C002 DELAY2: PUSH 02H05E7 DAFE DELAY3: DJNZ R2,DELAY305E9 D002 POP 02H05EB DAF8 DJNZ R2,DELAY205ED D002 POP 02H05EF DAF2 DJNZ R2,DELAY105F1 D002 POP 02H05F3 DAEC DJNZ R2,DELAY05F5 22 RETEND四、实验接线图五、实验步骤(1)在闪动“P.”状态,按PCDBG键(2)进入PC机C盘DV598子目录下,输入DBUG回车,选择PE子菜单,进入全屏幕编辑,输入实验源程序后,按F2或F3存盘,F4退出,文件名为HA2S.ASM。
单片机顺序控制课程设计
单片机顺序控制课程设计一、课程目标知识目标:1. 学生能理解单片机的基本原理和功能,掌握顺序控制的基本概念。
2. 学生能掌握单片机编程中的顺序控制指令,并应用于实际电路中。
3. 学生能解释并分析单片机顺序控制在实际应用中的工作原理。
技能目标:1. 学生能运用所学知识,设计并编写简单的单片机顺序控制程序。
2. 学生能对设计的顺序控制系统进行调试和故障排查,提高解决问题的能力。
3. 学生能通过实际操作,提升动手实践能力和团队协作能力。
情感态度价值观目标:1. 学生能培养对单片机及编程的兴趣,激发学习的积极性和主动性。
2. 学生在学习过程中,养成严谨、细心的态度,提高自我管理和约束能力。
3. 学生通过团队协作,培养沟通、交流和合作意识,增强集体荣誉感。
课程性质:本课程为实践性较强的课程,结合理论知识与实际操作,培养学生动手实践能力和创新能力。
学生特点:学生具备一定的单片机基础知识,具有较强的学习兴趣和动手欲望,希望通过实际操作提高自己的技能。
教学要求:教师需采用任务驱动法、案例教学法等教学方法,引导学生主动探究、积极实践,注重培养学生的创新意识和实际操作能力。
同时,关注学生的个体差异,因材施教,使每位学生都能在课程中取得进步。
通过分解课程目标为具体的学习成果,便于教学设计和评估的实施。
二、教学内容1. 单片机基础回顾:主要包括单片机的组成、工作原理和功能特点,重点复习单片机的内部结构及寄存器的作用。
2. 顺序控制原理:介绍顺序控制的概念、分类及其在单片机系统中的应用,分析顺序控制程序的编写方法。
3. 编程指令学习:学习单片机顺序控制相关指令,如跳转、循环等,并掌握其在编程中的应用。
4. 实践操作:设计简单的顺序控制程序,如流水灯、温度控制器等,让学生动手实践,提高编程和调试能力。
5. 故障分析与排查:分析在实际操作中可能出现的故障,教授学生如何进行排查和解决。
6. 案例分析与讨论:引入实际应用案例,让学生分组讨论,分析顺序控制在案例中的作用和实现方法。
工业顺序控制及显示设计单片机课程设计报告参考模板
《单片机及控制系统》课程设计报告题目:工业顺序控制及显示设计院(系):机电与自动化学院专业班级:电气工程及其自动化11XX班学生姓名:科比学号:20111131***指导教师:梅秋燕2014年06月15日至2014年06月28日华中科技大学武昌分校《单片机及控制系统》课程设计任务书一、设计题目工业顺序控制及显示设计二、设计主要内容(1)掌握51单片机在工业顺序控制中的应用,学习单片机的控制程序的设计及中断程序的编程应用。
(2)用七只发光二极模拟工业控制中的7道工序,高电平点亮,每道工序用定时器进行工序间的顺序转换。
(3)与此同时运用动态扫描和定时器1在数码管上显示出从765432开始以1/10秒的速度递减至765398,并保持显示此数。
(4)按规范撰写课程设计说明书,包括硬件和软件设计。
三、原始资料(1)单片机接口8051 P1.0-P1.6控制工业生产的七道工序,现模拟控制七只发光二极管的点亮,高电平点亮。
设定每道工序时间转换为延时,P3.4为开工启动开关,高电平启动。
P3.3为外部故障输入模拟开关,低电平报警,P1.7为报警声音输出。
设定7道工序只有一位输出。
(2)LCD显示电路LCD显示电路LCD显示电路,由U33的74HC245驱动,以显示电平状态。
高电平为“1”状态,点亮发光二极管。
(3)主程序和中断程序流程图(4)数码管显示电路显示电路结构图八段数码管显示电路由8155的PB0、PB1经74LS164“串转并”后输出得到。
6位位码由8155 的PA0口输出,经uA2003反向驱动后,选择相应显示位。
74LS164是串行输入并行输出转换电路,串行输入的数据位由8155的PB0控制,时钟位由8155的PB1控制输出。
写程序时,只要向数据位地址输出数据,然后向时钟位地址输出一高一低两个电平就可以将数据位置到74LS164中,并且实现移位。
向显示位选通地址输出高电平就可以点亮相应的显示位。
数码管数字代码表四、要求的设计成果(1)根据控制要求,进行控制系统硬件电路设计。
实验四_工业顺序控制实验
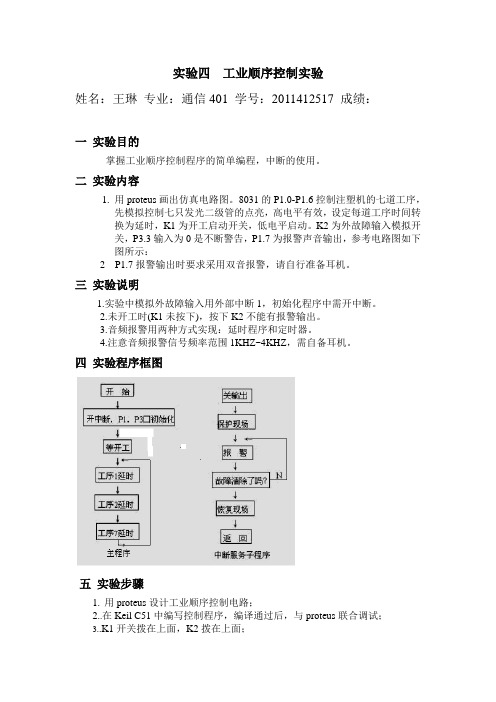
实验四工业顺序控制实验姓名:王琳专业:通信401 学号:2011412517 成绩:一实验目的掌握工业顺序控制程序的简单编程,中断的使用。
二实验内容1. 用proteus画出仿真电路图。
8031的P1.0-P1.6控制注塑机的七道工序,先模拟控制七只发光二级管的点亮,高电平有效,设定每道工序时间转换为延时,K1为开工启动开关,低电平启动。
K2为外故障输入模拟开关,P3.3输入为0是不断警告,P1.7为报警声音输出,参考电路图如下图所示:2 P1.7报警输出时要求采用双音报警,请自行准备耳机。
三实验说明1.实验中模拟外故障输入用外部中断1,初始化程序中需开中断。
2.未开工时(K1未按下),按下K2不能有报警输出。
3.音频报警用两种方式实现:延时程序和定时器。
4.注意音频报警信号频率范围1KHZ~4KHZ,需自备耳机。
四实验程序框图五实验步骤1.用proteus设计工业顺序控制电路;2..在Keil C51中编写控制程序,编译通过后,与proteus联合调试;3..K1开关拨在上面,K2拨在上面;4..用连续方式运行程序,此时应在等待开工状态;5..K1拨到下面(显低电平),各道程序应正常运行;6..K2拨到下面(低电平),应有声音报警(人为设置故障);7..K2拨到上面(高电平),排除故障,程序应从刚才报警的工序继续执行。
六 电路设计及调试1.实验电路p1_0p1_1p1_3p1_2p1_4p1_5p1_6p1_1p1_0p1_2p1_3p1_4p1_5p1_6XTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435P0.5/AD534P0.6/AD633P0.7/AD732P1.01P1.12P1.23P1.34P1.45P1.56P1.67P1.78P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115P2.7/A1528P2.0/A821P2.1/A922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427U1AT89C51C122PFC222PFX1CRYSTALC322UF R11kA02A14A26A38OE 1Y018Y116Y214Y312U2:A74LS240A011A113A215A317OE 19Y09Y17Y25Y33U2:B74LS240D1LED-YELLOWD2LED-YELLOW D3LED-YELLOW D4LED-YELLOWD5LED-YELLOWD6LED-YELLOWD7LED-YELLOW234567891RP1RESPACK-8SW1SW-SPDT-MOMSW2SW-SPDT-MOMR210kR310kR41kQ1PN2907LS1SPEAKERR510k2. 实验程序 (1)延时程序 #include<reg51.h> #include<intrins.h>#define uchar unsigned char #define uint unsigned intuchar code table[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40}; sbit K2=P3^3; sbit K1=P3^4; sbit speaker=P1^7; void delay(uint t) {uint i,j;for(i=t;i>0;i--) for(j=110;j>0;j--); }void delay1(){uint n=125;while(n--); }void delay2(){uint m=500;while(m--); }void main(){EA=1;EX1=1;P1=0x00;while(1){while(K1==0){uchar i;for(i=0;i<7;i++){P1=table[i];delay(500);}}}}void time() interrupt 2 {EX1=0;while(K2==0){ uint p,q;for(p=0;p<10;p++){speaker=1;delay1();speaker=0;delay1();}for(q=0;q<10;q++){speaker=1;delay2();speaker=0;delay2();}}EX1=1;}(2)定时器#include<reg51.h>#define uchar unsigned char#define uint unsigned intint i=0,n=0,m=0,count=0;bit flag=0;sbit k2=P3^3;sbit k1=P3^4;sbit speaker=P1^7;uchar code table[]={0x01,0x02,0x04,0x08,0x10,0x2 0,0x40};void delay(uint t){int a;for(;t>0;t--)for(a=110;a>0;a--);}void main(){P1=0x00;EA=1;EX1=1;while(1){while(k1==0){P1=table[i];i++;delay(500);if(flag==1){ET1=1;TR1=1;TMOD=0X02;TH1=256-125;TL1=256-125;flag=0;while(!k2);TR1=0;EX1=1;}if(i==7)i=0;}}}void INT_1()interrupt 2 {EX1=0;flag=1;}void time() interrupt 3 {speaker=~speaker; n++;if(n==10){count++;if(count==4){speaker=~speaker;m++;if(m==10)n=0;}}}3实验结果:喇叭发出救护车式双音信号。
哈工大单片机实验报告

Harbin Institute of Technology单片机原理与应用实验报告学生姓名:学号:班级:专业:任课教师:所在单位:软件实验在软件实验部分,通过实验程序的调试,使学生熟悉MCS-51的指令系统,了解程序设计过程,掌握汇编语言设计方法以及如何使用实验系统提供的调试手段来排除程序错误。
实验一清零程序一、实验目的掌握汇编语言设计和调试方法,熟悉键盘操作。
二、实验内容把2000~20FFh的内容清零。
三、程序框图四、实验过程实验中利用MOVX语句,将外部存储器指定内容清零。
利用数据指针DPTR完成数据传送工作。
程序采用用循环结构完成,R0移动单元的个数,可用CJNE比较语句判断循环是否结束。
五、实验结果及分析【问题回答】清零前2000H~20FFH中为内存里的随机数,清零后全变为0。
六、实验源程序;清零程序ORG 0640HMOV DPTR,#2000H ;(2000H)送DPTRMOV R0,#00HHERE: MOVX @DPTR,A ;0送(DPTR)INC DPTR ;DPTR+1INC R0CJNE R0,#0FFH,HERESJMP $END实验二拆字程序一、实验目的掌握汇编语言设计和调试方法。
二、实验内容把2000H的内容拆开,高位送2001H低位,低位送2002H低位,2001H、2002H高位清零,一般本程序用于把数据送显示缓冲区时用。
三、程序框图四、实验过程将寄存器中内容送入2000H,分别将高低四位移到低位,将高四位置零然后移入2001H 和2002H中。
利用MOVX指令、DPTR指针可实现数据的传送,利用高低四位交换指令SWAP和与指令ANL可进行对高低位的清零。
五、实验结果及分析【问题回答】将ANL A,#0FH改为ORL A,#0F0H可以实现将高位置为1。
六、实验源程序; 拆字程序START:MOV DPTR,#2000HMOVX A,@DPTRMOV R0,ASWAP AANL A,#0FHINC DPTRMOVX @DPTR,AMOV A,R0ANL A,#0FHINC DPTRMOVX @DPTR,AENDEND实验三拼字程序一、实验目的进一步掌握汇编语言设计和调试方法。
工业顺序控制设计硬件实习
课题名称_________________________________ 所在院系_________________________________ 班级_________________________________ 学号_________________________________ 姓名_________________________________ 指导老师_________________________________时间_________________________________科技艺术学院工程系单片机课程设计任务书班级:姓名:指导教师:年月日设计题目:工业顺序控制设计任务使用已制作好单片机系统设计实现工业顺序控制。
应具有下述功能:1、P口控制七道工序(比如P1.0—P1.7)用7只发光二极管模拟。
2、每道工序必须设计延时。
3、有按键模拟开工、停止功能。
4、模拟故障报警功能。
设计要求1、调研,查找并收集资料;2、总体方案设计,画出框图;3、单元电路设计;4、原理设计——绘制原理图(用Protel汇标准图);5、列写元器件明细表;6、撰写设计说明书(字数2000左右)7、参考资料目录。
参考资料1、张义和等主编《例说8051》人民邮电出版社,20062、徐泳龙主编《单片机原理及应用》机械工业出版社,20043、谢维成等主编《单片机原理与应用及C51程序设计》(第二版)清华大学出版社,2009教研室主任签字:年月日摘要中断(Interrupt)是一种被广泛使用的计算机技术。
中断技术实质上是一种资源共享技术,是解决资源竞争的有效方法,最终实现多项任务共享一个资源。
而中断系统又叫作中断管理系统,其功能是使处理机对外界异步事件具有处理能力。
单片机所具有的复杂实时控制功能与中断技术是密不可分的,面对控制对象随机发出的中断请求,单片机需要作出快速的响应并及时处理,以使被控对象保持在最佳的工作状态,达到控制的效果。
单片机课程设计报告,单片机实现的顺序控制
- .电气及自动化课程设计报告题目:单片机实现的顺序控制课程:单片机系统设计与Proteus仿真学生:学生学号:年级:专业:班级:指导教师:2015年9月目录一、课程设计性质和目的2二、软件介绍21、Proteus22、Keil uVision43三、设计要求及原理说明31 、课程设计的任务与要求32 、原理说明4四、设计主要流程4五、顺序程序设计6六、电路的设计与仿真8七、总结12八、参考书籍14一、课程设计性质和目的单片机课程设计是?单片机原理与应用及C51程序设计?课程完毕后的一门综合性实践课。
利用所学知识用单片机实现顺序控制。
所选题目?单片机实现的顺序控制?严密结合所学的主要容,加深稳固所学知识,同时对所学容进展扩展,有一定的深度和广度。
通过电路设计、安装、调试等一系列环节的实施使我对单片机有了更进一步的了解,并且是我有了以下收获。
〔1〕加强了对单片机和C语言的认识,充分掌握和理解设计各局部的工作原理、设计过程、选择芯片器件、模块化编程等多项知识。
〔2〕用单片机模拟实现具体应用,使个人设计能够真正使用。
〔3〕把理论知识与实践相结合,充分发挥个人能力,并在实践中锻炼。
〔4〕提高了利用已学知识分析和解决问题的能力。
二、软件介绍1、ProteusProtues软件是英国Lab Center Electronics公司出版的EDA工具软件〔该软件中国总代理为风标电子技术〕。
它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件。
它是目前比拟好的仿真单片机及外围器件的工具。
虽然目前国推广刚起步,但已受到单片机爱好者、从事单片机教学的教师、致力于单片机开发应用的科技工作者的青睐。
Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。
是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台,其处理器模型支持8051、HC11、PIC10/12/16/18/24/30/DsPIC33、AVR、ARM、8086和MSP430等,2010年又增加了Cortex和DSP系列处理器,并持续增加其他系列处理器模型。
工业顺序控制课程设计

工业顺序控制课程设计一、课程目标知识目标:1. 学生能够理解工业顺序控制的基本概念、原理及其在工业生产中的应用。
2. 学生能够掌握工业顺序控制系统的组成、设计方法和实施步骤。
3. 学生能够了解工业顺序控制中所涉及的传感器、执行器及其工作原理。
技能目标:1. 学生能够运用所学知识,分析工业生产过程中的控制需求,设计简单的顺序控制系统。
2. 学生能够利用相关软件或工具,搭建并调试工业顺序控制系统的模型。
3. 学生能够通过团队合作,解决实际工业顺序控制中的问题,提高实际操作能力。
情感态度价值观目标:1. 培养学生对工业顺序控制技术的兴趣,激发其学习热情和探究精神。
2. 培养学生严谨的科学态度,使其在学习和实践中遵循工程规范,提高工程素养。
3. 培养学生的团队协作能力,使其在合作中学会沟通、协调、共享,增强集体荣誉感。
课程性质:本课程为实践性较强的学科,结合理论教学和实验操作,培养学生的实际操作能力和创新能力。
学生特点:学生具备一定的电气、电子和自动化基础知识,具有较强的学习兴趣和动手能力。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,充分调动学生的主观能动性,培养其解决实际问题的能力。
通过课程学习,使学生在知识、技能和情感态度价值观方面取得具体的学习成果。
二、教学内容1. 工业顺序控制基本概念:介绍顺序控制、工业顺序控制的概念,分析其在工业生产中的重要性。
教材章节:第一章 工业顺序控制概述内容:顺序控制定义、工业顺序控制应用实例。
2. 工业顺序控制系统组成:学习工业顺序控制系统的各组成部分,了解各部分的作用及相互关系。
教材章节:第二章 工业顺序控制系统的组成内容:传感器、执行器、控制器、被控对象等。
3. 工业顺序控制设计方法:学习顺序控制系统的设计方法,包括流程图设计、梯形图设计等。
教材章节:第三章 工业顺序控制设计方法内容:流程图设计、梯形图设计、顺序功能图设计。
4. 工业顺序控制实施步骤:介绍工业顺序控制系统的实施步骤,包括硬件选型、软件编程、调试等。
单片机实验程序
工业顺序控制(INT0.INT1综合实验);掌握工业顺序控制的简单编程,中断的使用ORG 0000HSJMP MAINORG 0013HLJMP INTOMAIN: MOV P1,#00HORL P3,#00HPO11: JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#04HMOV PSW,#00H ;初始化MOV SP,#53HPO12: MOV P1,#01H ;第一道工序ACALL PO1BHMOV P1,#02H ;第二道工序ACALL PO1BHMOV P1,#04H ;第三道工序ACALL PO1BHMOV P1,#08H ;第四道工序ACALL PO1BHMOV P1,#10H ;第五道工序ACALL PO1BHMOV P1,#20H ;第六道工序ACALL PO1BHMOV P1,#40H ;第七道工序ACALL PO1BHSJMP PO12INTO: MOV B,R2 ;保护现场PO17: MOV P1,#00H ;关输出MOV 20H,#0A0H ;振荡次数PO18: SETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停止ACALL PO1A ;延时DJNZ 20H,PO18 ;不为零转CLR P1.7ACALL PO1AJNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO19: MOV R2,#10H ;延时1RETPO1A: MOV R2,#06H ;延时2 ACALL DELYRETPO1BH: MOV R2,#30H ;延时3 ACALL DELYRETDELY: PUSH 02H ;延时子程序DEL2: PUSH 02HDEL3: PUSH 02HDEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DELYRETEND工业顺序控制(INT0.INT1综合实验);掌握工业顺序控制的简单编程,中断的使用ORG 0000HSJMP MAINORG 0013HLJMP INTOMAIN: MOV P1,#00HORL P3,#00HPO11: JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#04HMOV PSW,#00H ;初始化MOV SP,#53HPO12: MOV P1,#01H ;第一道工序ACALL PO1BHMOV P1,#02H ;第二道工序ACALL PO1BHMOV P1,#04H ;第三道工序ACALL PO1BHMOV P1,#08H ;第四道工序ACALL PO1BHMOV P1,#10H ;第五道工序ACALL PO1BHMOV P1,#20H ;第六道工序ACALL PO1BHMOV P1,#40H ;第七道工序ACALL PO1BHSJMP PO12INTO: MOV B,R2 ;保护现场PO17: MOV P1,#00H ;关输出MOV 20H,#0A0H ;振荡次数PO18: SETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停止ACALL PO1A ;延时DJNZ 20H,PO18 ;不为零转CLR P1.7ACALL PO1AJNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO19: MOV R2,#10H ;延时1RETPO1A: MOV R2,#06H ;延时2 ACALL DELYRETPO1BH: MOV R2,#30H ;延时3 ACALL DELYRETDELY: PUSH 02H ;延时子程序DEL2: PUSH 02HDEL3: PUSH 02HDEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DELYRETEND工业顺序控制(INT0.INT1综合实验);掌握工业顺序控制的简单编程,中断的使用ORG 0000HSJMP MAINORG 0013HLJMP INTOMAIN: MOV P1,#00HORL P3,#00HPO11: JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#04HMOV PSW,#00H ;初始化MOV SP,#53HPO12: MOV P1,#01H ;第一道工序ACALL PO1BHMOV P1,#02H ;第二道工序ACALL PO1BHMOV P1,#04H ;第三道工序ACALL PO1BHMOV P1,#08H ;第四道工序ACALL PO1BHMOV P1,#10H ;第五道工序ACALL PO1BHMOV P1,#20H ;第六道工序ACALL PO1BHMOV P1,#40H ;第七道工序ACALL PO1BHSJMP PO12INTO: MOV B,R2 ;保护现场PO17: MOV P1,#00H ;关输出MOV 20H,#0A0H ;振荡次数PO18: SETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停止ACALL PO1A ;延时DJNZ 20H,PO18 ;不为零转CLR P1.7ACALL PO1AJNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO19: MOV R2,#10H ;延时1RETPO1A: MOV R2,#06H ;延时2 ACALL DELYRETPO1BH: MOV R2,#30H ;延时3 ACALL DELYRETDELY: PUSH 02H ;延时子程序DEL2: PUSH 02HDEL3: PUSH 02HDEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DELYRETEND工业顺序控制(INT0.INT1综合实验);掌握工业顺序控制的简单编程,中断的使用ORG 0000HSJMP MAINORG 0013HLJMP INTOMAIN: MOV P1,#00HORL P3,#00HPO11: JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#04HMOV PSW,#00H ;初始化MOV SP,#53HPO12: MOV P1,#01H ;第一道工序ACALL PO1BHMOV P1,#02H ;第二道工序ACALL PO1BHMOV P1,#04H ;第三道工序ACALL PO1BHMOV P1,#08H ;第四道工序ACALL PO1BHMOV P1,#10H ;第五道工序ACALL PO1BHMOV P1,#20H ;第六道工序ACALL PO1BHMOV P1,#40H ;第七道工序ACALL PO1BHSJMP PO12INTO: MOV B,R2 ;保护现场PO17: MOV P1,#00H ;关输出MOV 20H,#0A0H ;振荡次数PO18: SETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停止ACALL PO1A ;延时DJNZ 20H,PO18 ;不为零转CLR P1.7ACALL PO1AJNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO19: MOV R2,#10H ;延时1RETPO1A: MOV R2,#06H ;延时2 ACALL DELYRETPO1BH: MOV R2,#30H ;延时3 ACALL DELYRETDELY: PUSH 02H ;延时子程序DEL2: PUSH 02HDEL3: PUSH 02HDEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DELYRETEND。
基于8031设计的工业顺序控制
基于8031设计的工业顺序控制掌握工业顺序控制程序的简单编程,中断的使用。
实验内容1.实验原理图:2.实验内容8032 的P1.0—P1.6 控制注塑机的七道工序,现模拟控制七只发光二极管的点亮,高电平有效,设定每道工序时间转换为延时,P3.4 为开工启动开关,低电平启动。
P3.3 为外故障输入模拟开关,P3.3 为0 时不断告警。
P1.7 为报警声音输出,设定6 道工序只有一位输出,第七道工序三位有输出。
3、实验说明实验中用外部中断0,编中断服务程序的关键是:(1)保护进入中断时的状态,并在退出中断之前恢复进入状态。
(2)必须在中断程序中设定是否允许中断重入,即设置EX0 位。
一般中断程序进入时应保护PSW、ACC 以及中断程序使用但非其专用的寄存器,本实验中未涉及。
三、程序程序清单:ORG 0013H LJMP HA2S3 ORG 0580HHA2S: MOV P1,#07FH ORL P3,#00HHA2S1: JNB P3.4,HA2S1 ORL IE,#84H ORL IP,#04H MOV PSW,#00H MOV SP,#53HHA2S2: MOV P1,#07EH ACALL HA2S7 MOV P1,#07DH ACALL HA2S7 MOV P1,#07BH ACALL HA2S7 MOV P1,#077H ACALL HA2S7 MOV P1,#06FH ACALL HA2S7 MOV P1,#05FH ACALL HA2S7 MOV P1,#03FH ACALL HA2S7 SJMP HA2S2HA2S3: MOV B,R2HA2S4: MOV P1,#07FH MOV 20H,#0A0HHA2S5: SETB P1.7 ACALL HA2S6 CLR P1.7 ACALL HA2S6 DJNZ 20H,HA2S5 CLR P1.7 ACALL HA2S6 JNB P3.2,HA2S4 MOV R2,B RETIHA2S6: MOV R2,#06H ACALL DELAY RETHA2S7: MOVR2,#30H ACALL DELAY RETDELAY: PUSH 02HDELAY1: PUSH 02HDELAY2: PUSH 02HDELAY3: DJNZ R2,DELAY3 POP 02H DJNZ R2,DELAY2 POP 02H DJNZ R2,DELAY1 POP 02H DJNZ R2,DELAY RET END 四、实验步骤①P3.4。
哈工大单片机原理试验指导
《单片机原理》 实验指导书张毅刚 何谨 李华哈尔滨工业大学2007年4月目 录序-------------------------------------------------------------------------------------------------------------1实验1 单片机实验开发系统操作实验-------------------------------------2实验2 单片机数据区传送程序设计------------------------------------------4实验3 数据排序实验---------------------------------------------------------------------6实验4 查找相同数个数-----------------------------------------------------------------8实验5 P1口转弯灯实验---------------------------------------------------------------10实验6 工业顺序控制--------------------------------------------------------------------13实验7 8255控制交通灯---------------------------------------------------------------16实验8 A/D转换实验-----------------------------------------------------------------------19实验9 D/A转换实验-----------------------------------------------------------------------22实验10 电子时钟(定时器、中断综合实验)--------------------26附录1 DAIS-80958B单片机实验开发系统简介--------------------37附录2 实验开发系统的字形/字位/键值表---------------------------39序一、实验素养和一般知识1.实验前准备工作(1) 明确实验目的、熟悉实验内容、掌握实验步骤、了解所用单片机实验开发系统及仪器设备的性能。
单片机实验报告
南京晓庄学院电子工程学院实验报告课程名称:单片机系统设计与应用姓名:森专业:电子信息科学与技术年级:14级学号:052016年12 月1 日实验项目列表1、实验箱端口为com6。
2、芯片选择切换到513、停止运行使用实验箱上的复位按钮实验室号:___ 实验时间:成绩:实验一仿真软件的使用1.实验目的和要求1)熟悉Keil C51软件界面,以及编辑、编译、运行程序的步骤;2)掌握单片机仿真软件使用和调试的方法。
2.实验原理Keil C51软件使用在Keil C51集成开发环境下,建立一个工程并编辑源程序,熟悉Keil C51集成开发环境下各种菜单、命令的使用。
3.主要仪器设备(实验用的软硬件环境)安装有Keil C51软件的PC机1台4.操作方法与实验步骤Keil C51软件使用(1)建立用户文件夹(2)建立工程(3)建立文件并编码。
输入以下源程序,并保存在项目所在的目录中(4)把文件加入工程中(5)编译工程。
编译时观察在界面下方的“Build”页中的到编译错误信息和使用的系统资源情况等。
(6)调试。
利用常用调试命令,如复位、运行、暂停、单步、单步跳过、执行完当前子程序、运行到当前行、下一状态、打开跟踪、观察跟踪、反汇编窗口、观察窗口、代码作用范围分析、1#串行窗口、内存窗口、性能分析、工具按钮等命令进行调试,观察并分析调试结果。
(7)目标代码文件的生成。
运行生成相应的.HEX文件。
5.实验内容及程序1)从DATA区地址起始地址为40H的连续10个内存单元的内容传送到XDATA区起始地址为2000H的10个内存单元中。
注意:DATA区地址起始地址为40H的连续10个内存单元必须先赋初值。
P83-5源程序#include <reg51.h>#define uchar unsigned charxdata unsigned char buffer1[10]_at_ 0x2000;//在xdata区定义数组变量BUF1,首地址为2000Hdata unsigned char buffer2[10]_at_ 0x40;//在data区定义数组变量BUF2,首地址为40Hvoid main(void)uchar i;for(i=0;i<10;i++)buffer1[i]='A';for(i=0;i<10;i++)buffer2[i]=buffer1[i];//把data区中的内容传送给xdata区while(1);}6.实验现象P83-5运行效果图2)将DATA区地址为20H的单元赋初值为05H,地址为21的单元赋初值为06H,将这两个单元的数据拼成56H,存入XDA TA区地址为2000H的单元。
单片机课程设计,单片机实现的顺序控制
电气及自动化课程设计报告题目:单片机实现的顺序控制课程:单片机系统设计与Proteus仿真学生姓名:学生学号:年级:专业:班级:指导教师:2015年9月目录一、课程设计性质和目的 ..........................................................二、软件介绍 ........................................ 错误!未定义书签。
1、 Proteus ............................................................................2、 Keil uVision4 ...............................................................三、设计要求及原理说明 ..........................................................1 、课程设计的任务与要求................................................2 、原理说明...........................................................................四、设计主要流程 .......................................................................五、顺序程序设计 .......................................................................六、电路的设计与仿真...............................................................七、总结.........................................................................................八、参考书籍 ........................................ 错误!未定义书签。
实验三 单片机工业顺序控制

实验三单片机工业顺序控制(设计型)一、实验目的与要求1.学习和掌握单片机工业顺序控制程序的应用编程;2.熟悉和掌握单片机中断功能的使用。
二、实验仪器1、DJ-598KC单片机开发系统 1台2、仿真器(EASYPROBE) 1只3、PC 机 1台三、实验内容 (2学时)在工业控制中,象冲压、注塑、轻纺、制瓶等生产过程,都是一些连续生产过程,按某种顺序有规律地完成预定的动作,对这类连续生产过程的控制称顺序控制,象注塑机工艺过程大致按“合模→注射→延时→开模→产伸→产退”顺序动作,用单片机最易实现。
设由单片机P1.0~1.6控制注塑机的七道工序,模拟控制七只发光二极管的点亮,低电平有效,设定每道工序时间转换为延时时间,P3.4为开工启动开关,高电平启动。
P3.3为外部故障输入模拟开关,低电平报警,P1.7为报警声音输出,设定前6道工序只有一位输出,第七道工序三位有输出。
(1)实验电路及接线图(2)实验程序框图四、实验步骤:按图接好连线。
执行程序,把K1接到高电平,观察发光二极管点亮情况,确定工序执行是否正常,然后把K2置为低电平,看是否有声音报警,恢复中断1.报警停,又从刚才报警时一道程序执行下去。
可用单步、单步跟踪,非全速断点、全速断点,连续执行功能调试软件,直到符合自己程序设计要求为止。
五、实验参考程序①汇编代码程序:(E:\DJ51\598KASM\HW04.ASM)ORG 0000HLJMP PO10ORG 0013HLJMP PO16ORG 0190HPO10:MOV P1,#7FHORL P3,#00HPO11:JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#04HMOV PSW,#00H ;初始化MOV SP,#53HPO12: M OV P1,#7EH ;第一道工序ACALL PO1BMOV P1,#7DH ;第二道工序ACALL PO1BMOV P1,#7BH ;第三道工序ACALL PO1BMOV P1,#77H ;第四道工序ACALL PO1BMOV P1,#6FH ;第五道工序ACALL PO1BMOV P1,#5FH ;第六道工序 ACALL PO1BMOV P1,#0FH ;第七道工序ACALL PO1BSJMP PO12PO16:MOV B,R2 ;保护现场PO17:MOV P1,#7FH ;关输出MOV 20H,#0A0H ;振荡次数PO18: S ETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停振ACALL PO1A ;延时DJNZ 20H,PO18 ;不为0转CLR P1.7ACALL PO1A ;停振JNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO19:MOV R2,#10HACALL DELY ;延时1RETPO1A:MOV R2,#06HACALL DELY ;延时2RETPO1B: M OV R2,#30HACALL DELY ;延时3RETDELY: P USH 02HDEL2: P USH 02HDEL3: P USH 02H ;延时DEL4: D JNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DELYRETEND②C代码程序:(E:\DJ51\51C\HW04.C)#include<reg51.h>sbit P1_7=P1^7;sbit P3_3=P3^3;sbit P3_4=P3^4;void delay(unsigned int i){unsigned int j,k;for(k=0;k<i;k++)for(j=0;j<100;j++);}void int1_int(void) interrupt 2{EX1=0;while(P3_3==0){P1_7=1;delay(1);P1_7=0;delay(1);}EX1=1;}void main(void){EA=1;EX1=1;PX1=1;P1=0x7f;while(1){while(P3_4==1){1){P1=0x7e;delay(500);P1=0x7d;delay(500);P1=0x7b;delay(500);P1=0x77;delay(500);P1=0x6f;delay(500);P1=0x5f;delay(500);P1=0x0f;delay(500);}}}}六.思考:修改程序,使每道工序中有多位输出。
单片机实验指导书
第一章DVCC-52196JH单片机仿真实验系统简介第一节DVCC系列单片机仿真实验系统性能§ 1 . 1 系统性能指标1.仿真、实验相结合。
2.实验模块化结构,互不影响,通过连线又可将各模块有机结合。
3.实验内容设置丰富、合理,满足教学大纲要求。
4.每项实验连线方便,既能满足学生动手能力愿望,又能充分发挥学生的创新能力,提高教学实验的质量和效率。
5.自带集成调试环境,Win9X/NT软件平台,含:源程序库、芯片资料库、原理图库、元器件位置图库、实验说明、动态调试工具库。
6.提供源程序编辑、汇编、链接。
7.电路具有过压保护,确保系统安全、可靠工作。
8.整机采用热风整平工艺基板、波峰焊接,实验连接接口采用圆孔插座,整机可靠性好。
9.自带EPROM写入器,可对27128、2764EPROM进行写入。
10.自带键盘显示器,进口键座,专用彩色键帽,决无按键不可靠现象。
11.系统用串行口、用户用串行口相互独立,在通过RS232与上位机联机状态下,同样可以调试用户串行口程序。
12.系统带有示波器功能,通过RS232口,可将测得的信号显示在上位机的屏幕上。
该系统通过RS232口可连各种上位机,在Win9X/NT软件平台进行仿真开发和实验。
同时系统自带键盘显示器,无须任何外设也能独立工作,支持因陋就简建立单片机实验室。
系统提供实验程序库,均放在系统光盘上,可直接使用。
同时全部实验程序机器码已固化在EPROM中,作为用户程序。
在进入实验前,需将该EPROM中的程序(在固化区)传送到仿真RAM区,以便以单步、断点、连续等方式运行程序。
§ 1.2 系统提供的主要实验项目如下:一、MCS—51部分软件实验1、清零程序实验 6、字符串查找并统计相同字符串个数2、拆字程序实验 7、双字节乘法程序3、拼字程序实验 8、多分支程序设计4、数据块传送实验 9、定时/计数器实验5、数据排序实验 10、电脑时钟实验二、MCS—51部分硬件实验1、8031单片机P3、P1口应用 11、步进电机控制2、工业顺序控制 12、直流电机控制3、并行I/O口8255应用 13、电子音响4、简单I/O口输入、输出扩展 14、继电器控制5、A/D转换0809应用 15、数据存贮器扩展和程序存贮器扩展6、D/A转换0832应用 16、8031串行口应用实验(一)—双机通信实验7、串并转换实验 17、8031串行口应用实验(二)—与PC机通信8、定时计数器8253A应用 18、温度测量实验(5G14433应用)9、可编程键盘显示8279A应用 19、压力测量实验10、打印机接口应用对DVCC—××JH+机型增加下列四个扩展实验一、128×64液晶显示实验二、16×16LED点阵显示实验三、语音录放实验四、IC卡读写实验§ 1.3 实验系统主要机型如下:DVCC—52JH(JH+) 51实验、仿真DVCC—52196JH(JH+) 51、196实验、仿真DVCC—5286JH(JH+) 51实验、仿真,8088实验DVCC—598JH(JH+) 51、196实验、仿真,8088实验第二节 MCS—51实验系统安装与启动§ 2.1 MCS51实验系统安装与启动1. DVCC系列实验系统在出厂时均为51状态对DVCC—52196JH机型:SK1位1—5置ON位置,位6—10置OFF对DVCC—5286JH和DVCC—598JH机型:a.SK1位1—5置ON,位6—10置OFF;b.SK2位1—2置ON;c.SK3置ON;d.SK4置OFFe.卧式KBB置51、96位置,立式KBB1开关置51、88位置(只对DVCC—598JH/JH+);f.DL1—DL4连1、22. 如果系统用于仿真外接用户系统,将40芯仿真电缆一头插入系统中J6插座,另一头插入用户系统的8051CPU位置,注意插入方向,仿真头上小红点表示第一脚,对应用户8051CPU 第一脚。
模拟工业顺序控制1
目录设计思想-------------------------------------------------------------------------------第6页程序功能介绍-------------------------------------------------------------------------第7页程序流程图----------------------------------------------------------------------------第8页程序清单及相关说明----------------------------------------------------------------第9~11页设计总结-------------------------------------------------------------------------------第12页设计思想对于工业顺序控制的初步认识,我组经过几天的努力,完成这次的设计,我们利用P1口进行控制,流程需要进行四道工作工序,我们分别用P1.0控制L1灯模拟第一道工序,用P1.1控制L2灯模拟第二道工序,用P1.2控制L3灯模拟第三道工序,用P1.3控制L4灯模拟第四道工序,P1.5控制L5灯模拟第五道工序,用P1.6控制L8故障灯模拟故障发生时告警,P3.2口作为工序的总启动开关。
P3.3口作为故障的模拟开关。
程序运行时,通过使用SETB 置1使8031CPU允许中断,同时把EX0和PX0都置1允许外部中断0中断定义为高优先级中断。
接下来通过JNB语句来判断P3.2,若是高电位则往下执行否则继续等待。
程序继续执行,用CLR语句把P1.0口进行清零从而使第一个灯亮,接着用ACALL调用语句调用延时子程序使灯亮设定的时间。
之后SETB使P1.1置1从而使灯熄灭,接着又判断P3.2口若为低电位则停止工作否则继续执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三单片机工业顺序控制(设计型)
一、实验目的与要求
1.学习和掌握单片机工业顺序控制程序的应用编程;
2.熟悉和掌握单片机中断功能的使用。
二、实验仪器
1、DJ-598KC单片机开发系统 1台
2、仿真器(EASYPROBE) 1只
3、PC 机 1台
三、实验内容 (2学时)
在工业控制中,象冲压、注塑、轻纺、制瓶等生产过程,都是一些连续生产过程,按某种顺序有规律地完成预定的动作,对这类连续生产过程的控制称顺序控制,象注塑机工艺过程大致按“合模→注射→延时→开模→产伸→产退”顺序动作,用单片机最易实现。
设由单片机P1.0~1.6控制注塑机的七道工序,模拟控制七只发光二极管的点亮,低电平有效,设定每道工序时间转换为延时时间,P3.4为开工启动开关,高电平启动。
P3.3为外部故障输入模拟开关,低电平报警,P1.7为报警声音输出,设定前6道工序只有一位输出,第七道工序三位有输出。
(1)实验电路及接线图
(2)实验程序框图
四、实验步骤:
按图接好连线。
执行程序,把K1接到高电平,观察发光二极管点亮情况,确定工序执行是否正常,然后把K2置为低电平,看是否有声音报警,恢复中断1.报警停,又从刚才报警时一道程序执行下去。
可用单步、单步跟踪,非全速断点、全速断点,连续执行功能调试软件,直到符合自己程序设计要求为止。
五、实验参考程序
①汇编代码程序:(E:\DJ51\598KASM\HW04.ASM)
ORG 0000H
LJMP PO10
ORG 0013H
LJMP PO16
ORG 0190H
PO10:MOV P1,#7FH
ORL P3,#00H
PO11:JNB P3.4,PO11 ;开工吗?
ORL IE,#84H
ORL IP,#04H
MOV PSW,#00H ;初始化
MOV SP,#53H
PO12: M OV P1,#7EH ;第一道工序
ACALL PO1B
MOV P1,#7DH ;第二道工序
ACALL PO1B
MOV P1,#7BH ;第三道工序
ACALL PO1B
MOV P1,#77H ;第四道工序
ACALL PO1B
MOV P1,#6FH ;第五道工序
ACALL PO1B
MOV P1,#5FH ;第六道工序 ACALL PO1B
MOV P1,#0FH ;第七道工序
ACALL PO1B
SJMP PO12
PO16:MOV B,R2 ;保护现场
PO17:MOV P1,#7FH ;关输出
MOV 20H,#0A0H ;振荡次数
PO18: S ETB P1.7 ;振荡
ACALL PO1A ;延时
CLR P1.7 ;停振
ACALL PO1A ;延时
DJNZ 20H,PO18 ;不为0转
CLR P1.7
ACALL PO1A ;停振
JNB P3.3,PO17 ;故障消除吗?
MOV R2,B ;恢复现场
RETI
PO19:MOV R2,#10H
ACALL DELY ;延时1
RET
PO1A:MOV R2,#06H
ACALL DELY ;延时2
RET
PO1B: M OV R2,#30H
ACALL DELY ;延时3
RET
DELY: P USH 02H
DEL2: P USH 02H
DEL3: P USH 02H ;延时
DEL4: D JNZ R2,DEL4
POP 02H
DJNZ R2,DEL3
POP 02H
DJNZ R2,DEL2
POP 02H
DJNZ R2,DELY
RET
END
②C代码程序:(E:\DJ51\51C\HW04.C)
#include<reg51.h>
sbit P1_7=P1^7;
sbit P3_3=P3^3;
sbit P3_4=P3^4;
void delay(unsigned int i)
{
unsigned int j,k;
for(k=0;k<i;k++)
for(j=0;j<100;j++);
}
void int1_int(void) interrupt 2
{
EX1=0;
while(P3_3==0)
{
P1_7=1;
delay(1);
P1_7=0;
delay(1);
}
EX1=1;
}
void main(void)
{
EA=1;
EX1=1;
PX1=1;
P1=0x7f;
while(1)
{
while(P3_4==1)
{
1)
{
P1=0x7e;
delay(500);
P1=0x7d;
delay(500);
P1=0x7b;
delay(500);
P1=0x77;
delay(500);
P1=0x6f;
delay(500);
P1=0x5f;
delay(500);
P1=0x0f;
delay(500);
}
}
}
}
六.思考:修改程序,使每道工序中有多位输出。
七.实验报告要求
1.画出实验的硬件电路图及设计程序流程图;
2.整理实验程序清单,并给程序加详细注释;
3.总结实验中出现的问题并进行解决的方法;
4.给出实验结果及对实验的改进意见。