Adams 归纳与总结
ADAMSView操作心得

ADAMSView操作心得ADAMS/View 操作心得1、如何永久改变ADAMS的启动路径在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、ADAMS中的单位的问题开始的时候需要为模型设置单位。
在所有的预置单位系统中,时间单位是秒,角度是度。
可设置:MMKS--设置长度为千米,质量为千克,力为牛顿。
MKS—设置长度为米,质量为千克,力为牛顿。
CGS—设置长度为厘米,质量为克,力为达因。
IPS—设置长度为英寸,质量为斯勒格(slug),力为磅。
在模型运行的过程中也可以改变单位系统的设定。
还可以在文本框中使用自己的单位,比如默认的角度单位度时可以使用R表示弧度。
我感觉在ADAMS内部好像是把所有的带单位的输入量都转换成统一的单位了。
3、关于ADAMS的坐标系的问题。
当第一次启动ADAMs/View时,在窗口的左下角显示了一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/View将全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置,ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、关于物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过MODIFY物体的position属性;令一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
adams知识点总结

adams知识点总结Adams is a multi-body dynamics simulation software used to analyze the motion and behavior of mechanical systems. It is widely used in the automotive, aerospace, and industrial machinery industries to test and validate designs before physical prototypes are built. Adams is known for its ability to accurately predict the performance of complex systems and its user-friendly interface.Key features of Adams include advanced modeling, flexible analysis, and robust post-processing capabilities. The software allows users to create detailed models of mechanical systems, define complex interactions between components, and simulate various operating conditions to predict the system's behavior. In this summary, we will explore the key knowledge points of Adams and how they are used in engineering design and analysis.1. ModelingOne of the key knowledge points in Adams is modeling, which refers to the creation of a digital representation of a mechanical system. Adams offers a wide range of modeling tools to help users build accurate and detailed models of their systems. These tools include parametric modeling, flexible bodies, and contact modeling.Parametric modeling allows users to define their systems using mathematical equations and parameters, making it easy to create complex and customizable models. Flexible bodies enable users to model the deformations and dynamic behavior of components, such as gears, springs, and rubber mounts. Contact modeling allows users to simulate the interactions between bodies in a system, such as collisions, friction, and wear.By using these modeling tools, engineers can create highly realistic digital models of their systems, which can be used to predict the behavior of the physical system under various conditions.2. AnalysisAnother key knowledge point in Adams is analysis, which refers to the process of simulating the behavior of a mechanical system using the digital model. Adams offers a wide range of analysis tools to help users simulate and analyze complex mechanical systems. These tools include dynamic analysis, kinematic analysis, and optimization.Dynamic analysis allows users to simulate the motion and behavior of a mechanical system under various operating conditions, such as acceleration, braking, and cornering. This type of analysis is essential for predicting the performance and safety of systems, such as vehicle suspensions, steering systems, and drivetrains. Kinematic analysis allows users to study the motion and interactions between components in a system, without considering forces and torques. This type of analysis is often used to study mechanisms, such as linkages, cams, and gears.Optimization allows users to find the best design parameters for a given system, such as the shape of a component, the material properties, or the operating conditions. This type of analysis is used to improve the performance, efficiency, and reliability of mechanical systems, such as gears, bearings, and structural components.By using these analysis tools, engineers can gain valuable insights into the behavior of their systems, which can be used to optimize designs and improve the performance and reliability of mechanical systems.3. Post-processingThe final key knowledge point in Adams is post-processing, which refers to the visualization and interpretation of the results from the simulation. Adams offers a wide range of post-processing tools to help users visualize and interpret the behavior of their systems. These tools include animation, plotting, and reporting.Animation allows users to visualize the motion and behavior of their systems in a dynamic and interactive way. This type of post-processing is essential for understanding the kinematics and dynamics of systems, such as vehicle suspensions, engine systems, and gearboxes. Plotting allows users to generate graphs and charts to visualize and interpret the results from the simulation, such as the motion, forces, and torques of components. Reporting allows users to generate detailed reports of the results from the simulation, such as the performance, safety, and reliability of the system. This type of post-processing is essential for communicating the results of the analysis to other stakeholders, such as managers, engineers, and customers.By using these post-processing tools, engineers can gain valuable insights into the behavior of their systems, which can be used to make informed decisions about design changes and improvements.In conclusion, Adams is a powerful multi-body dynamics simulation software used to analyze the motion and behavior of mechanical systems. It offers advanced modeling, flexible analysis, and robust post-processing capabilities to help engineers create detailed models, simulate the behavior, and interpret the results of complex systems. By using these knowledge points, engineers can optimize designs, improve the performance, and ensure the reliability of mechanical systems in various industries.。
ADAMS个人学习总结
ADAMS个人学习总结
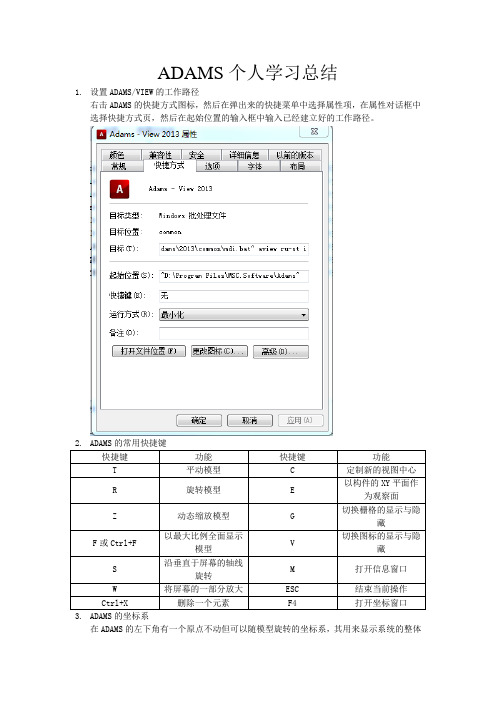
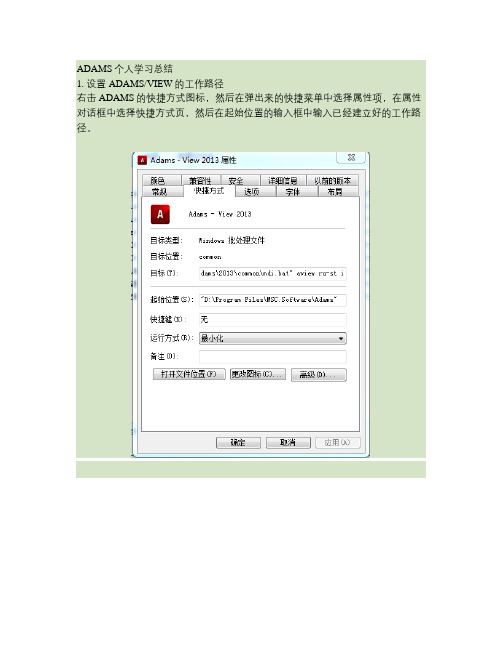
1.设置ADAMS/VIEW的工作路径
右击ADAMS的快捷方式图标,然后在弹出来的快捷菜单中选择属性项,在属性对话框中选择快捷方式页,然后在起始位置的输入框中输入已经建立好的工作路径。
3.ADAMS的坐标系
在ADAMS的左下角有一个原点不动但可以随模型旋转的坐标系,其用来显示系统的整体
坐标系,默认为笛卡尔坐标系,另外每个刚体的质心处系统会固定一个坐标系,称为连体坐标系。
ADAMS中有三种坐标形式,可通过【Settings】→【coordinate system】设置。
4.设置工作栅格
可通过【Settings】→【Working Grid】设置。
5.设置单位制和重力加速度
可分别通过【Settings】→【Units】和【Settings】→【Gravity】对单位制和重力加速度设置。
6.部件的旋转操作
7.添加约束。
adams函数学习总结
二、三角函数 SIN(x) SINH(x) COS(x) COSH(x) TAN(x) TANH(x) ASIN(x) ACOS(x) ATAN(x) ATAN2(x1,x2) 切值
数字表达式x的正弦值 数字表达式x的双曲正弦值 数字表达式x的余弦值 数字表达式x的双曲余弦值 数字表达式x的正切值 数字表达式x的双曲正切值 数字表达式x的反正弦值 数字表达式x的反余弦值 数字表达式x的反正切值 两个数字表达式x1,x2的四象限反正
• • • • • • • • •
DIFF DIFFERENTIATE DMAT DOT ELEMENT EXCLUDE FIRST FIRST_N INCLUDE INTEGR INTERATE INVERSE LAST LAST_N MAX MAXI MEAN MIN MINI NORM2 NORMALIZE RECTANGULAR RESAMPLE RESHAPE RMS ROWS SERIES
0时返回absxsqrtx数字表达式x的平方根值数学函数二三角函数sinx数字表达式x的正弦值sinhx数字表达式x的双曲正弦值cosx数字表达式x的余弦值coshx数字表达式x的双曲余弦值tanx数字表达式x的正切值tanhx数字表达式x的双曲正切值asinx数字表达式x的反正弦值acosx数字表达式x的反余弦值atanx数字表达式x的反正切值atan2x1x2两个数字表达式x1x2的四象限反正切值三取整函数intx数字表达式x取整aintx数字表达式x向绝对值小的方向取整anintx数字表达式x向绝对值大的方向取整ceilx数字表达式x向正无穷的方向取整floorx数字表达式x向负无穷的方向取整nintx最接近数字表达式x的整数值rtoix返回数字表达式x的整数部分位置方向函数一位置函数localongline返回两点连线上与第一点距离为指定值的点loccylindrical将圆柱坐标系下坐标值转化为笛卡儿坐标系下坐标值locframemirror返回指定点关于指定坐标系下平面的对称点locglobal返回参考坐标系下的点在全局坐标系下的坐标值locinline将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值并归一化locloc将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值loclocal返回全局坐标系下的点在参考坐标系下的坐标值locmirror返回指定点关于指定坐标系下平面的对称点loconaxis沿轴线方向平移loconline返回两点连线上与第一点距离为指定值的点locperpendicular返回平面法线上距离指定点单位长度的点locplanemirror返回特定点关于指定平面的对称点locrelativeto返回特定点在指定坐标系下的坐标值locspherical将球面坐标转化为笛卡儿坐标locxaxis坐标系x轴在全局坐标中的单位矢量locyaxis坐标系y轴在全局坐标中的单位矢量loczaxis坐标系z轴在全局坐标中的单位矢量二方向函数orialignaxis将坐标系按指定方式旋转至与指定方向对齐所需旋转的角度orialongaxiseul将坐标系按指定方式旋转至与全局坐标系一个轴方向对齐所需旋转的角度oriallaxes将坐标系旋转至由平面上的点定义的特定方向第一轴与指定平面上两点连线平行第二轴与指定平面平行时所需旋转的角度orialongaxis将坐标系旋转至其一轴线沿指
第二周ADAMS总结
首先,本周一开始再次遇到蛋疼的ADAMS启动问题,一键还原也不好使了o(╯□╰)o,耽误了不少时间,逼得我重装系统,在把系统换到32位旗舰版之后更改了启动项终于可以运行了。
(*^__^*) 嘻嘻……
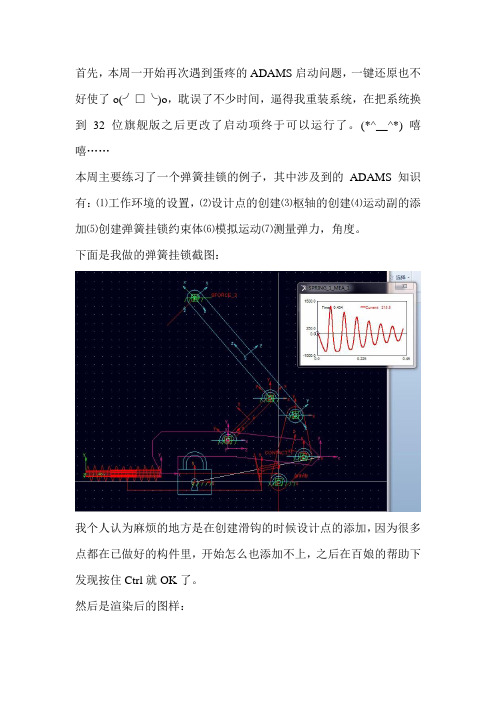
本周主要练习了一个弹簧挂锁的例子,其中涉及到的ADAMS知识有:⑴工作环境的设置,⑵设计点的创建⑶枢轴的创建⑷运动副的添加⑸创建弹簧挂锁约束体⑹模拟运动⑺测量弹力,角度。
下面是我做的弹簧挂锁截图:
我个人认为麻烦的地方是在创建滑钩的时候设计点的添加,因为很多点都在已做好的构件里,开始怎么也添加不上,之后在百娘的帮助下发现按住Ctrl就OK了。
然后是渲染后的图样:
渲染之后的图感觉更有味,~\(≧▽≦)/~ 期待之后有更大突破。
......END......。
adams凸轮总结
adams凸轮总结Adams中凸轮的建立知识总结Adams中凸轮有两种:一、Point-Curve点线凸轮,添加时,先选择从动件上的一个marker点,然后在选择凸轮的轮廓曲线。
而凸轮的轮廓曲线也有两种,curve和edge具体选择那种要根据实际情况来定。
二、Curve-Curve线线凸轮,添加时先选择从动件上的一条曲线,然后再选择凸轮的轮廓曲线。
选择曲线时first和second也有两种情况curve和edge 具体选择那种也是根据情况来定。
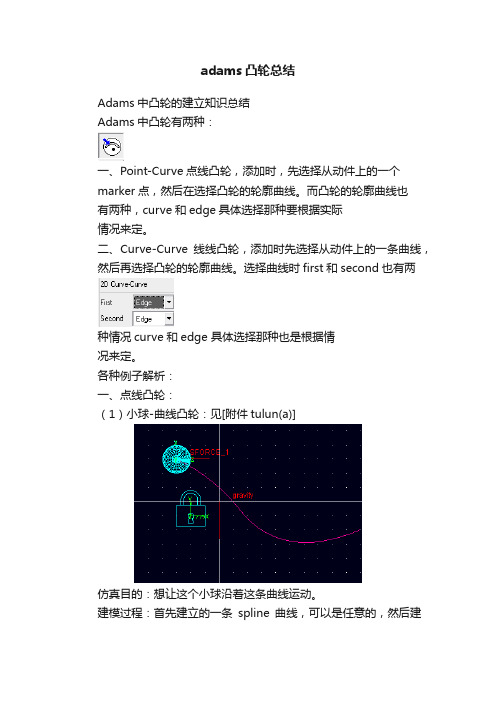
各种例子解析:一、点线凸轮:(1)小球-曲线凸轮:见[附件tulun(a)]仿真目的:想让这个小球沿着这条曲线运动。
建模过程:首先建立的一条spline曲线,可以是任意的,然后建立一个小球。
添加运动副过程:然后添加凸轮副(用Point-Curve)。
首先选择小球的小球的中心点cm,然后选择那条曲线。
固定那条曲线,然后就可以进行仿真了。
注意点:1、一定要固定那条曲线,否者仿真不能进行。
2、所选择的marker点可以和曲线不在同个平面上。
(2)摆动凸轮:见[附件tulun(b)]仿真目的:建立摆动式槽形凸轮。
建模过程:首先建立两个杆件,然后通过spline用add to part 命令建出凸轮的轮廓曲线。
添加运动副过程:凸轮副用Point-Curve,同样是先选择下面那个连杆最上端的那个marker点,然后再选择上面那个连杆上的那条曲线作为凸轮的轮廓曲线。
注意点:凸轮的轮廓曲线可以和上面那个实体连接方式有两种,合并和固定副连接。
(3)尖底从动凸轮:见[附件tulun(c)]仿真目的:所有件都用曲线来表示来表示凸轮运动。
建模过程:首先建立一个封闭的曲线来代表凸轮的主动件,然后建立一条直线来代表凸轮的从动件,然后在两个件的接触点出添加marker 并且这个marker一定要隶属于从动件。
添加运动副过程:首先给上面那条曲线添加铰链和驱动,然后给下面的曲线添加移动副。
ADAMS个人学习总结
ADAMS个人学习总结
1. 设置ADAMS/VIEW的工作路径
右击ADAMS的快捷方式图标,然后在弹出来的快捷菜单中选择属性项,在属性对话框中选择快捷方式页,然后在起始位置的输入框中输入已经建立好的工作路径。
3. ADAMS的坐标系
在ADAMS的左下角有一个原点不动但可以随模型旋转的坐标系,其用来显示系统的整体
坐标系,默认为笛卡尔坐标系,另外每个刚体的质心处系统会固定一个坐标系,称为连体坐标系。
ADAMS中有三种坐标形式,可通过【Settings】→【coordinate system】设置。
4. 设置工作栅格
可通过【Settings】→【Working Grid】设置。
5. 设置单位制和重力加速度
可分别通过【Settings】→【Units】和【Settings】→【Gravity】对单位制和重力加速度设置。
6. 部件的旋转操作
7.添加约束。
学习adams时的常见问题总结
14、如何在ADAMS下由数据生成样条曲线?在tools->command navigator....->Data element->create->spring line 后,会出現一个输入window窗口,选择numerical将xyz数值copy到xyz各自的表格上.......15、ADAMS中如何建模,该如何控制坐标点,才能得到精确的位置?可以粗略建立 Point 设计点后,可以 Modify,在表格编辑器 Table Editor 里可以精确定位点的坐标,还可以用Command。
16、关于bushing16.1、bushing一般用于模拟橡胶连接部件,主要是指线性橡胶。
一般汽车底盘的轴承都有加橡胶,那就可以在轴和轴承之间用这个。
输入在各个方向的刚度和阻尼就可以了。
16.2、bushing主要是考虑到了两个物体间的弹性连接,比如麦弗逊悬架的下控制臂和副车架,幅车架和车身相连的地方都是采用了bushing,在car里面就可以看到。
对于运动学分析,采用一般的连接即可(比如万向节),做动力学分析,就得采用busing以模拟弹性力。
17、请问如何对零件进行复制?可用position move,还有一个命令是position rotation。
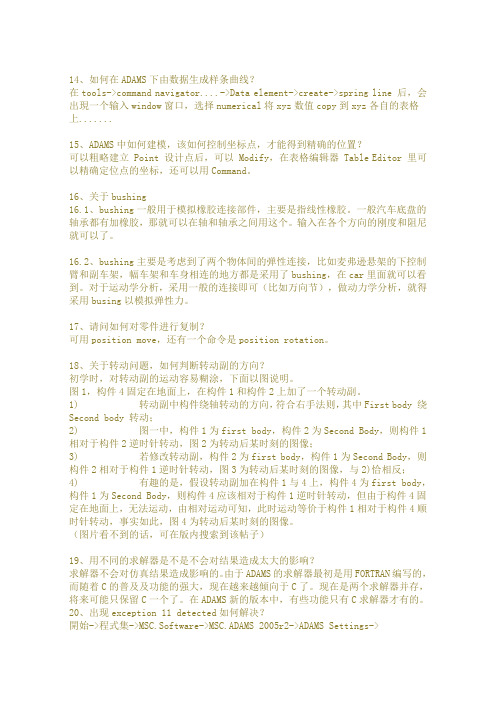
18、关于转动问题,如何判断转动副的方向?初学时,对转动副的运动容易糊涂,下面以图说明。
图1,构件4固定在地面上,在构件1和构件2上加了一个转动副。
1) 转动副中构件绕轴转动的方向,符合右手法则,其中First body 绕Second body 转动;2) 图一中,构件1为first body,构件2为Second Body,则构件1相对于构件2逆时针转动,图2为转动后某时刻的图像;3) 若修改转动副,构件2为first body,构件1为Second Body,则构件2相对于构件1逆时针转动,图3为转动后某时刻的图像,与2)恰相反;4) 有趣的是,假设转动副加在构件1与4上,构件4为first body,构件1为Second Body,则构件4应该相对于构件1逆时针转动,但由于构件4固定在地面上,无法运动,由相对运动可知,此时运动等价于构件1相对于构件4顺时针转动,事实如此,图4为转动后某时刻的图像。
adams学习心得

运动副:按照运动副的接触形式分类:面和面接触的运动副在接触部分的压强较低,被称为低副,而点或线接触的运动副称为高副,高副比低副容易磨损。
共振:指机械系统所受激励的频率与该系统的固有频率相接近时候,系统振幅显著增大的现象。
通常是有害的。
由于软件问题,当出现自己发现莫名其妙的问题时,可以选择关闭再重启试试……1.tool,打开database navigater,选择highlight,可点击查看,选择各部件。
前端含+处,需双击点开。
Sensor 传感器 variable 可变的 integer 整数entity 实体 attribute 属性View——model,打开一个文件时候,不显示时使用---part only首先设置gravity,units(单位),网格、①合并merge:先选要合并的次要件,再选主要部件。
选择时,打开database管理器,对着部件表,在部件周边右键选择。
合并与重命名应该是同步交叉进行的,如车体合并前就需要先将某个part如part7先行重命名。
蛋的合并也在重命名之后。
回转体依然。
注:本例中回转体的宏命令并未将其合并,part75后续合并。
这个不是问题。
从命名之后的合并,中间一个part的缺失会引出一个错误,如何解决“??②重命名。
是part的重命名。
后,于检查database中 ,检查是否所有更改完毕。
.my_rename_dan !重命名variable creat variable_name=ip integer_value=0while condition=(ip<20) 【1-20:假设范围是20到61,则初值定为19,范围定为61】variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+38)))&new = (eval(".zhengxiang.dan_"//ip))end !zhengxiang是文件名,后面是部件原部件名称,new后面即为新名字,dan1等…… 6*(ip-1)+38这种式子需要自己算variable delete variable_name= ipvariable creat variable_name=ip integer_value=0while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+159)))&new = (eval(".zhengxiang.dan_"//(ip+20))) end !命名21-40variable delete variable_name= ip更改颜色variable create variable_name=ip integer_value=0 while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity attributes &entity_name =(eval(".zhengxiang.dan_"//ip//".solid4")) &type_filter = Solid &visibility = no_opinion &name_visibility = no_opinion &color = .colors.RED &entity_scope = all_color &&&transparency = 0!endvariable delete variable_name= ip.my_merge_cheti(合并元件)variable creat variable_name=ip integer_value=10 !创建变量,名为IP,赋予初值10while condition=(ip<18) !条件循环语句variable modify variable_name=ipinteger_value=(eval(ip+1)) !变量自动加一part merge rigid_bodypart_name=(eval(".cheti.PART"//ip)) into_part=.cheti.cheendvariable delete variable_name= ip !删除变量更改合并后的part的颜色,因为颜色只能改solid的。
ADAMS从入门到精通

/Rail
/Flex
/Exchange /Tire
/Linear
ADAMS/View: 可以像建立物理样机一样建立任何机械系统 的虚拟样机。首先建立运动部件(或者从 CAD软件中导入)、用约束将它们连接、通 过装配成为系统、利用外力或运动将他们驱 动。 ADAMS/View支持参数化建模,以便能很容 易地修改模型并用于实验研究。 用户在仿真过程进行中或者当仿真完成后, 都可以观察主要的数据变化以及模型的运动。 这些就像做实际的物理试验一样。
12左右视图
3.5.2 命令菜单方式
对于主工具箱中不包含的命令,可以在命 令菜单栏中选择输入,有以下几种输入菜 单命令的方法: 用鼠标选择菜单中的有关命令; 在按下Alt的同时,键入菜单标题中下划线 的字母,选择有关菜单,再用同样的方法 选择命令; 按F10键激活File菜单,然后用箭头键来移 动选择有关菜单和命令; 使用命令快捷键。
ADAMS/PostProcessor
: 显示ADAMS仿真结果的可视化图形界 面。 提供了一个统一化的界面,以不同的 方式回放仿真的结果。为了能够反复 使用,页面设置以及数据曲线格式都 能保存起来,这样既有利于节省时间 也有利于整理标准化的报告格式。 可以方便地同时显示多次仿真的结果 以便比较。
选择和输入ADAMS/View命令有五种常用的方法 1 、主工具箱 ◦ 命令集有多个层次 2、菜单栏 3、弹出式菜单 ◦ 屏幕上的各种对象,例如:构件、标记、约束、 运动、力等 ◦ 输入对话框中的文本输入栏 ◦ 后处理图标中的各种对象,例如:曲线、标题、 坐标、符号标记等 4、快捷工具栏 5、命令窗口
Build | Measure:建立各种测量关系。 Build | Function:建构各种函数关系式。Байду номын сангаас Build | Data elements:有Spline, matrix, curve, array。 Build | System elements :有State Variable, Differential/Transfer/ Linear State/ General State Equation。 Review | Create an AVI movie file 。 Review | Create Trace Spline:针对某一点(marker)绘 制出模拟过程间的轨迹线。 Settings | Force Graphics:设定Force, Torque的比例 及属性。 Settings | Solver:设定求解过程中的细部设定,如: 求解器的种类、公差、精度、除错、输出等设定。 Settings | icons :设定Icons大小、颜色、显示/隐藏 等属性。 Settings | Fonts :自行设定。
Adams归纳与总结

Adams归纳与总结一、ADAMS/View二进制数据库bin文件以“.bin”为文件名后缀,文件中记录了从ADAMS启动后到存储为bin文件时的全部信息-包含模型的完整拓扑结构信息、模型仿真信息以及后处理信息。
可以包含多个模型、多个分析工况和结果。
可以保存ADAMS/View的各种设置信息。
文件为二进制不能阅读、编辑,只能通过ADAMS/View 调阅,由于信息全面一般文件都比较大。
ADAMS/View命令cmd文件以“ .cmd”为文件名后缀,是由ADAMS/View命令编写的模型文件,可以包含模型的完整拓扑结构信息(包括所有几何信息)、模型仿真信息,为文本文件,可读性强,可以进行编程,是ADAMS的二次开发语言,不包含ADAMS/View的环境设置信息,不包含仿真结果信息,只能包含单个模型。
ADAMS/Solver模型语言(ADAMS Data Language)adm文件,以“.adm”为文件名后缀,文件中包含模型中拓扑结构信息,但有些几何形体如link等不能保留。
ADAMS/View的环境设置不能保留。
ADAMS/Solver可以读取adm文件,与ADAMS/Solver仿真控制语言acf文件配合可以直接利用ADAMS/Solver进行求解。
ADAMS/Solver仿真控制语言acf文件,以“.acf”为文件名后缀,文件中可以包含ADAMS/Solver命令对模型进行修改和控制的命令,从而控制仿真的进行。
ADAMS/Solver将仿真分析结果中用户定义的输出变量输出到req文件,以“.req”为文件名后缀;ADAMS/Solver将仿真分析结果中将模型的缺省输出变量输出到res文件,以“.res”为文件名后缀;ADAMS/Solver将仿真分析结果中图形部分结果输出到gra文件,以“.gra”为文件名后缀。
ADAMS/Solver将仿真分析结果中用户定义的输出变量以列表的形式输出到out文件,以“.out”为文件名后缀。
第五周 Adams总结剖析
典型结构(运动、姿态、受力) 动画演示
典型问题
冗余约束 摩擦 接触 柔性体 参数化建模与试验分析
二. ADAMS理论基础—多刚体动力 学
刚体位置
y'
Y
P
s
x'
r z' O'
R0 X
Z
O0
r R0 s
P全局坐标 r [x y z]T
O’坐标
R0 [x0' y0 z0 ]T
C 2hiTj hij 2hiTj hij 2c(t)c(t) 2c(t)c(t)
约束方程/运动学方程/动力学方程
qi xO yO zO T
q q1 q2
qN T
C1(q,t)
C
(q,
t)
C
2ห้องสมุดไป่ตู้
(q,
t)
0
C
S
(q,
t
)
Q
e j
Q
I j
s
i
i 1
C i q j
0
j 1, 2, , n
影响
OA =150mm;AB =600mm; BC =120mm;BD =500mm; CE =600mm;XD =400mm; YD 500mm; YE=600mm; phi=30deg.
Link: Width:20mm、Depth:5mm
格式要求
封面(不含页码): 名称(XX课程 课后练习1)
Ci (q,t) 0
i 1, 2, s
《动力学》《多刚体动力学》 《数值仿真及其在航天发射技术中的应用》
三、ADAMS课后作业
利用ADAMS工具,分析下图所示机构的如下特性: 1、OA转速为50转/分时E点的速度和加速度随OA转角变化过
adams学习交流
LOC_ON_AXIS (O1,D,N)返回在N方向距原点距离为D的一点在全局坐标系下的坐标值。 例:LOC_ON_AXIS(marker_2, 5, "x") LOC_PERPENDICULAR (M)返回距阵M代表的平面的法线上一点,该法线过第一点, 返回点距第一点的距离为一个单位长度。 例:LOC_PERPENDICULAR({{10,12,0},{14,12,0},{12,10,0}}) LOC_X_AXIS(O1)坐标系x轴在全局坐标中的单位矢量 LOC_X_AXIS(marker_2) ={1, 0, 0 } LOC_Y_AXIS(O1)坐标系y轴在全局坐标中的单位矢量( 同上) LOC_Z_AXIS(O2) 坐标系z轴在全局坐标中的单位矢量( 同上)
摩擦力
移动副施加摩擦力: 接触力中加摩擦力:
对于运动副来说:在你不选择上图所示的uN时,运动副是 没有摩擦力的.也就是说默认添加的运动副没有摩擦力.
移动和旋转
两种方法: 两种方法:
这两种方法各有各的好处,比如上面那种,你可以对一个 group进行移动.具体的到用熟练时自然就知道那个适合 什么情况.
样条差值函数
样条函数的建立: 样条函数的建立:
一、在adams中将数据文件作为test data输入模型中 一、在adams中将数据文件作为test data输入模型中 File-import-,在“ File-import-,在“file type”一栏中选中Test data;选中“Create Splines”; type”一栏中选中Test data;选中“ Splines” “file to read”一栏中右击鼠标,找到文件所存放的位置;在“independent read”一栏中右击鼠标,找到文件所存放的位置;在“ colume”一栏中指出自变量数据所在的列(如1)。“ colume”一栏中指出自变量数据所在的列(如1)。“model name”一栏中右击 name” 鼠标,找到当前模型;最后”OK” 鼠标,找到当前模型;最后”OK”。就会在在当前模型中产生样条函数。
adams心得体会
adams心得体会在追求成功的道路上,很多人往往会陷入困惑和迷茫。
无论是在学业上还是工作中,成就的背后都需要我们不断地付出努力和坚持。
经过一段时间的探索和总结,我深刻体会到了一些成功的要素。
在这篇文章中,我将分享我对成功的理解和心得体会。
首先,我认为成功的关键在于树立明确的目标。
无论是短期目标还是长期目标,我们都应该明确自己想要实现的是什么。
只有明确的目标才能让我们有所追求和动力。
当我们设定一个具体的目标时,我们就会拥有一种使命感和责任感,这将推动我们朝着目标前进。
其次,成功需要坚持和毅力。
人生的道路上充满了各种困难和挑战,但只有那些具备坚韧精神的人才能战胜困难并迈向成功。
在面对挫折和失败时,我们不能轻易放弃,而是要保持乐观的心态,不断调整自己的方向和策略。
只有通过不断地努力和坚持,我们才能跨越障碍,最终实现自己的目标。
此外,成功也需要不断学习和提升自己的能力。
现代社会发展迅速,知识更新换代很快。
只有通过不断学习和充实自己,我们才能适应社会的需求和挑战。
阅读是一种非常有效的学习方式,通过阅读我们可以拓宽自己的眼界,获取更多的知识。
同时,参加培训课程和学习新技能也是提升自己能力的重要途径。
只有不断学习和提升自己,我们才能在竞争激烈的社会中立于不败之地。
此外,我认为与他人合作和建立良好的人际关系也是成功的关键。
人是社会性动物,我们无法独自完成所有的事情。
与他人合作和相互支持,可以发挥每个人的优势,共同实现更大的目标。
同时,良好的人际关系也可以为我们带来更多的机会和资源。
建立良好的人际关系需要我们的善意和真诚,通过积极地与他人沟通和互动,我们可以建立起信任和共同的利益,从而推动彼此的成长和进步。
最后,成功还需要我们保持积极的心态和乐观的态度。
人生中总会遇到各种各样的困难和挑战,但我们不能因此而失去信心和勇气。
要相信自己的能力和潜力,要坚信自己可以战胜困难并实现目标。
保持积极的心态和乐观的态度,能够帮助我们面对挫折和失败时更好地调整自己的心情和思考方式,从而更好地解决问题。
adams柔性体学习总结PPT学习教案
第10页/共13页
启动顺序:build→Flexible Bodies有ADAMS/Flex、Discrete Flexible Link、Rigid To Flex、Flex To Flex。
Flex的使用
(1)ADAMS/Flex
从文件夹中直接调入模态中性文件( mnf)。 在这个 对话框 中可以 定义生 成柔性 体的名 称(Flexi ble Body Name),调入文件的名称(Modal Neutral File Name),也可以输入阻尼比( Damping Ratio),选择放置起始点(Location),还 有其他 。
第6页/共13页
① Shell Quad
需要定义Element Size(单元尺寸)、Minimum Size(最小尺寸)、Shell Thickness(厚度)、Material(材料 )、Number of Modes(模数)。 Minimum Angle(Deg)、Span Angle(Deg)、Growth Rate、Element Order等保持默认值就行。 也可以选择复选框Stress Analysis,这样在后处理中可以 观察到 应力云 图。
adams柔性体学习总结
会计学
1
Autoflex的使用
一、启动autoflex选项:
打开tool→plugin Manager选择如下图的几项:
第1页/共13页
二、建立的方法
build→Flexible_Bodies→ADA MS/Auto fle x… 共有三种方法:Extrusion(拉伸 )、Geometr y(几何 体)、i mport mesh(导入网格)。
第7页/共13页
② Solid Hexa
ADAMS操作心得
hiADAMS/View 和ADAMS/Car的基础操作和心得1、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams 的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、如何将回放过程保存为AVI格式的电影文件,以便在其他场合使用?点击plotting(或F8)进入postprocessor ,右键--load ANIMATION,点击"play"开始仿真,点击"record"开始录制动画。
3、a/car Template Builder.为什么我看不见这个菜单选项??答:需要改一下的!在你的系统盘下去面。
例如我的C:\Documents and Settings\rickytang(rickytang 为我的用户名)下面有一个.acar文件,用记事本打开,然后将! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE standard改为:! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE expert 再启动car就可以看见选项了!进入car后按F9或者在tools下面选第一项就可以在模板与标准界面之间切换!4、关于communicatorcommunicator的出现是由于car是分块建模(子系统)为基础,而communicator告诉ADAMS 软件子系统之间如何连接,所以communicator的名字要完全一样才行,而且对于某一特定的子系统而言,有多少与外部系统、testrig的连接就需要有多少个communicator。
suspension parameter代表悬架特性反映,可参考公用模板中_trailing_arm.tpl和_mul t i_link.tpl。
adams心得
碰到问题及时解决——有了心得及时总结ADAMS专题1、ADAMS操作自动复制的问题在ADAMS里面操作模型时突然弹出Database Navigator,关掉后,只要在进行旋转,平移,放大缩小等操作就又会自动弹出Database Navigator,如果我选择了某一物体,Database Navigator是不会弹出的,旋转操作后该物体会在原地复制,而且鼠标会变成其他形状,这是软件的冲突问题,与有道词典有冲突,关掉有道就好了。
2、保存当前显示设置和其他任何设置主菜单的setting-save setting就可以。
在ADAMS下次启动时就会预先读取这个文件,没有时在读取模板文件,这样就可以按照自己的风格设置了。
恢复默认的方法是setting-restore settings.3、简单的测量方法在显示坐标窗口的前提下,选择测量的起始点,按住数遍拖动到目标点,这时距离就会在坐标栅格中显示。
如果打开栅格,则是最进的两个栅格点;如没有打开,则就是这之间的实际距离。
4、辅助信息的显示和隐藏辅助信息包括工作栅格(working grid),对象图标(screen icons),视图方向坐标(view triad),视图标题(view title)。
共有两种方法:1、view-view accessories选择相应的对象即可;2、使用主工具箱的切换工具集。
5、常用的快捷方式F全屏显示T平移R旋转Z动态缩放W窗口缩放C指定旋转中心S沿垂直平面轴旋转G栅格的显隐V图标的显隐M打开信息窗口ESC结束当前操作F1帮助F2读取命令文件F3命令输入窗口F4坐标窗口F8后处理模块选择时按住ctrl键可以暂时取消捕捉6、对于大型的修改,可以利用数据库浏览器或者8、单击右下角i时的不同显示问题选中元素的情况下,会弹出没有选中的情况下,弹出数据库浏览器9、solidworks导入ADAMS的经验总结步骤总结如下:1、在solidworks中把零件或组件另存为parasolid格式,版本最好选12.0以下,文件名和保存路径不能出现中文字符。
adams心得体会

adams心得体会Adam's心得体会在我参加工作以来,我积累了一些宝贵的经验和体会。
这些经验不仅仅指业务上的技巧和知识,更包括了与人相处、自我成长以及职场发展等方面的体悟。
在这篇文章中,我将分享一些对于工作和生活的心得体会。
1. 保持积极的心态工作遇到挑战和困难是非常常见的,但是保持积极的心态对于克服困难至关重要。
我发现,当我面对问题时,如果能够积极乐观地面对,找到解决问题的方法,事情往往会变得更加顺利。
同时,积极乐观的态度也能够影响到周围的人,营造良好的工作氛围。
2. 学会与他人合作在现代职场中,合作能力是非常重要的。
与他人合作不仅能够提高工作效率,还能够培养团队精神和沟通能力。
我学会了倾听他人的意见,学会尊重他人的观点,并且学会在团队中发挥我的优势,为团队的目标而努力。
3. 不断学习与成长我相信持续学习和个人成长是取得成功的关键。
在这个快速发展的时代,技术和知识都在不断更新换代,只有紧跟时代的脚步,不断学习新知识和技能,才能够在职场中立于不败之地。
我养成了每天学习的习惯,通过阅读书籍、参加培训和与同行交流的方式,不断提升自己。
4. 保持工作与生活的平衡在工作和生活之间保持平衡是非常重要的。
过度工作可能会导致身心疲惫,而忽略了生活中的乐趣和家庭的重要性。
我学会了给自己留出休息和放松的时间,让我能够更好地面对工作中的压力,并且更加享受生活。
5. 积极迎接变化职场是一个充满变化的地方,我们必须学会适应和应对变化。
我发现,积极主动地面对变化,能够更好地提升自己的适应能力和灵活性。
同时,变化也是机遇,我们要善于抓住机会,勇于创新,不断寻找到更好的方法和解决方案。
在这篇文章中,我分享了一些我在工作中的心得体会。
保持积极的心态,学会与他人合作,持续学习与成长,保持工作与生活的平衡,积极迎接变化,这些都是我在职场上的宝贵经验。
我相信,只要我们不断努力学习和改进自己,我们一定能够取得更大的成就。
让我们一起努力,为更美好的未来而奋斗!。
(全)ADAMS 基础知识讲解(图文并茂)【转载仿真论坛】
目录1.adams软件介绍2.adams学习书籍3.软件安装问题4.常见基础问题4.1一般问题4.2有关齿轮副4.3有关凸轮副4.4蜗轮蜗杆模拟4.5有关行星齿轮传动4.6spline5.常用函数5.1函数总体介绍5.2样条函数:akispl,cubspl5.3step函数5.4IF函数5.5impact与bistop函数5.6gforce和sforce函数5.7sensor,acf的应用6.adams与CAD数据转换6.1proe6.2UG6.3catia6.4solidwork6.5其他CAD软件7.flex相关7.1autoflex8.MATLAB和ADAMS联合仿真篇一、软件介绍篇ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。
1973年Mr.Michael E.Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。
密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。
2002年3月18日MSC.Software公司并购MDI 公司,自此ADAMS并入MSC产品线名称为MSC.ADAMS(本文仍简称ADAMS)。
ADMAS软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、接口模块、工具箱5类,其中核心模块为ADAMS/View——用户界面模块、ADAMS/Solver——求解器和ADAMS/Postprocessor——专用后处理模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、ADAMS/View二进制数据库bin文件以“.bin”为文件名后缀,文件中记录了从ADAMS启动后到存储为bin文件时的全部信息-包含模型的完整拓扑结构信息、模型仿真信息以及后处理信息。
可以包含多个模型、多个分析工况和结果。
可以保存ADAMS/View的各种设置信息。
文件为二进制不能阅读、编辑,只能通过ADAMS/View调阅,由于信息全面一般文件都比较大。
ADAMS/View命令cmd文件以“ .cmd”为文件名后缀,是由ADAMS/View命令编写的模型文件,可以包含模型的完整拓扑结构信息(包括所有几何信息)、模型仿真信息,为文本文件,可读性强,可以进行编程,是ADAMS的二次开发语言,不包含ADAMS/View的环境设置信息,不包含仿真结果信息,只能包含单个模型。
ADAMS/Solver模型语言(ADAMS Data Language)adm文件,以“.adm”为文件名后缀,文件中包含模型中拓扑结构信息,但有些几何形体如 link等不能保留。
ADAMS/View的环境设置不能保留。
ADAMS/Solver可以读取adm文件,与ADAMS/Solver仿真控制语言acf文件配合可以直接利用ADAMS/Solver进行求解。
ADAMS/Solver仿真控制语言acf文件,以“.acf”为文件名后缀,文件中可以包含ADAMS/Solver命令对模型进行修改和控制的命令,从而控制仿真的进行。
ADAMS/Solver将仿真分析结果中用户定义的输出变量输出到req文件,以“.req”为文件名后缀;ADAMS/Solver将仿真分析结果中将模型的缺省输出变量输出到res文件,以“.res”为文件名后缀;ADAMS/Solver将仿真分析结果中图形部分结果输出到gra文件,以“.gra”为文件名后缀。
ADAMS/Solver将仿真分析结果中用户定义的输出变量以列表的形式输出到out文件,以“.out”为文件名后缀。
ADAMS/Solver将仿真过程中的警告信息、错误信息输出到msg文件,以“.msg”为文件后缀。
二、ADAMS/View 和ADAMS/Car的基础操作和心得1、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、如何将回放过程保存为A VI格式的电影文件,以便在其他场合使用?点击plotting(或F8)进入postprocessor ,右键--load ANIMATION,点击"play"开始仿真,点击"record"开始录制动画。
3、a/car Template Builder.为什么我看不见这个菜单选项?答:需要改一下的!在你的系统盘下去面。
例如我的C:Documents and Settingsrickytang(rickytang为我的用户名)下面有一个.acar文件,用记事本打开,然后将! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE standard改为:! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE expert再启动car就可以看见选项了!进入car后按F9或者在tools下面选第一项就可以在模板与标准界面之间切换!4、关于communicatorcommunicator的出现是由于car是分块建模(子系统)为基础,而communicator 告诉ADAMS软件子系统之间如何连接,所以communicator的名字要完全一样才行,而且对于某一特定的子系统而言,有多少与外部系统、testrig的连接就需要有多少个communicator。
suspension parameter代表悬架特性反映,可参考公用模板中_trailing_arm.tpl和_multi_link.tpl。
communicator表示数据传递的。
纵臂、螺旋弹簧、减震器有一端是外部连接,需要建立mount,然后会自动产生输入communicator.输出communicator一般有以下8个:(它主要是把数据传递给轮胎的)co[lr]_camber_angleco[lr]_suspension_mountco[lr]_suspension_uprightco[lr]_toe_angleco[lr]_tripot_to_differentialco[lr]_wheel_centercos_driveline_activecos_suspension_parameters_ARRAY可参考公用模板中的悬架模型来建立。
5、test-rig是做什么用的??CAR中共有两种试验台(TEST_RIG),一种是MDI_SUSPENSION_TESTRIG,另一种是MDI_SDI_TESTRIG,前者用于悬架仿真,后者用于整车仿真,试验台是通过COMMUNICATOR与其它子系统链接的,请仔细阅读有关COMMUNICATOR的帮助。
6、ADAMS和MATLAB联合仿真经验谈论坛中有关adams和simulink联合仿真的帖子不少,部分是成功者的经验,多数是初学者的疑惑。
怎么安装和找到control模块,怎么在control中生成必需的中间文件,为什么仿真会失败?本人也曾对这些问题困惑过,经过一番摸索,积累了一点经验,愿与大家商讨。
对于第一个问题,我想就不必多说了。
对于第二个问题可以参考郑建荣的ADAMS虚拟样机技术入门与提高第十三章机电一体化系统仿真部分,书中有两个问题需要注意:(1)书中介绍的ADAMS版本好像是10.0的,对于使用12.0的有一些差异:在Plant Export设置中无法直接选择输入输出变量control_torque、azimuth_position、rotor_velocity,它们分别由专门的宏tmp_MDI_PINPUT和tmp_MDI_POUTPUT表示。
(2)天线仰角的方位角似乎应该是elevation_position,而不是azimuth_position,后者是天线支撑的转角。
其它按文中所述步骤进行,File Prefix栏可随便写,不必一定用ant_test,最后在ADAMS的当前目录下生成四个文件:ant_test.cmdant_test.admant_test.acfant_test.m第三个问题基本上是由于没有正确设置路径,找不到所需的文件造成的,这也说明了control模块在设计时没有很好地考虑健壮性问题。
具体来说simulink在开始仿真时要找到以下这些文件:1、上述生成的文件,主要是ant_test.m和ant_test.cmd,ant_test.m用于在simulink 中对control模块环境和一些参数进行初始化,它必须在仿真前执行;ant_test.cmd 是天线模型定义文件,由于这里ADAMS是作为simulink创建的一个子进程而被启动的,它所需的模型文件名由simulink的调用参数传过来的,所以simulink 要能够定位ant_test.cmd(我一开始把它放到adams当前目录下,频频失败)。
2、adams_plant.dll,它其实就是adams_sub的核心,ADAMS提供一个S函数,用于adams和simulink联合仿真的调度和通讯,如果simulink找不到它,则仿真就不能进行。
adams_plant.dll位于ADAMS12controls下。
解决方法是在simulink中设置好上述文件所在的路径,但一个更方便的方法是把它们都拷到matlab的当前工作目录下,一般是MATLAB6p1work。
经过以上设置,应该不会再出现仿真失败的对话框了吧。
另外,如果因为一些原因仿真失败,需重启matlab,否则的话因为一些运行库的错误信息还保留在系统中,即便改正了错误仿真也会失败,只有重新启动初始化这些库。
我用的是adams12和matlab6.1,以前流传它们之间存在不兼容的问题,其实都是上述原因造成的,不存在版本兼容的问题,adams和matlab都是成功的商业软件,在发布前经过了大量的测试,如果不兼容他们不会置若罔闻,现在好像还没有他们的官方声明吧。
确实,大部分的失败是由于没有正确设置工作路径而造成的,我想既然是针对一个项目进行仿真,那干脆为自己的项目建立一个文件夹,使ADAMS和MATLAB 的工作区都相同,如发现有时仿真不成,可把adams_plant.dll也事先拷贝到同一文件夹里,这样方便又不会出大错。
另外,对于还不大熟悉MATLAB的来说,在重仿时最好重ADAMS里重新导入MATLAB,并且必须在MATLAB里重新运行(很多时候MATLAB原来产生的变量被替换了),而不能只是简单的重新运行MATLAAB里建立的SIMULINK 模型。
总的来说,我感觉两者的联合仿真,困难之处不在于两者的接口问题,更关键的是我们所建立的机械系统的数学模型能否正确的建立,这将直接影响我们能否实现预想的控制目的,因为之所以要联合MATLAB,就是因为系统里各个量关系不好确定,要是容易确定的直接用ADAMS 里的函数等也可以控制了,对吧?所以要想更顺利的实现两者联合仿真的成功率,也需要对模型有准确的把握,不知道各位能否就机械方面较常见的系统归纳一下它们的数学模型,结合ADAMS 实现更好的控制。
Adams_plant.dllDecode.m.libAdams_severce7、关于转动问题,如何判断转动副的方向?初学时,对转动副的运动容易糊涂,下面以图说明。
图1,构件4固定在地面上,在构件1和构件2上加了一个转动副。
1) 转动副中构件绕轴转动的方向,符合右手法则,其中First body 绕Second body 转动;2) 图一中,构件1为first body,构件2为Second Body,则构件1相对于构件2逆时针转动,图2为转动后某时刻的图像;3) 若修改转动副,构件2为first body,构件1为Second Body,则构件2相对于构件1逆时针转动,图3为转动后某时刻的图像,与2)恰相反;4) 有趣的是,假设转动副加在构件1与4上,构件4为first body,构件1为Second Body,则构件4应该相对于构件1逆时针转动,但由于构件4固定在地面上,无法运动,由相对运动可知,此时运动等价于构件1相对于构件4顺时针转动,事实如此,图4为转动后某时刻的图像。