学习adams时的常见问题总结
adams学习交流
对于运动副来说:在你不选择上图所示的uN时,运动副是 没有摩擦力的.也就是说默认添加的运动副没有摩擦力.
移动和旋转
两种方法: 两种方法:
这两种方法各有各的好处,比如上面那种,你可以对一个 group进行移动.具体的到用熟练时自然就知道那个适合 什么情况.
二、后处理里创建spline:
三、build→Data Elements→Spline 问题:1、怎么用General建样条曲线?
2、怎么在后处理里用.csv文件或txt文件 建曲线?在后处理的file->import->numeric data(txt可用) 数据两列就行。创建完曲线后可 以用这条曲线生成spline.
LOC_FRAME_MIRROR (L,O1,N1)返回点L关于参考坐标系O1中平面N1对称点。 例:LOC_FRAME_MIRROR({7,7,0}, marker_1, "xy") LOC_MIRROR (L,O1,N1)返回点L关于参考坐标系O1中平面N1对称点。 例:LOC_MIRROR({7,7,0}, marker_1, "xy") LOC_PLANE_MIRROR (L,Mp)返回点L关于平面Mp的对称点. 例:LOC_PLANE_MIRROR({2,4,0},{{10,12,0},{14,12,0},{12,10,0}}) .
一个简单例子中的问题 (函数的运用) 函数的运用) 压床原理图:
1、行程控制量用一个位置函数: (LOC_ALONG_LINE(POINT_3, POINT_19, DV_5)) 2、施加阻力用IF函数: if(100-.model_1.MEA_PT2PT_1:0,200,if(.model_1.PART_6_MEA_1:200,0,0)) 3、简单说一下优化设计: 首先要参数化建模,确定设计变量。 要明确优化的目标函数。
Adams问题集
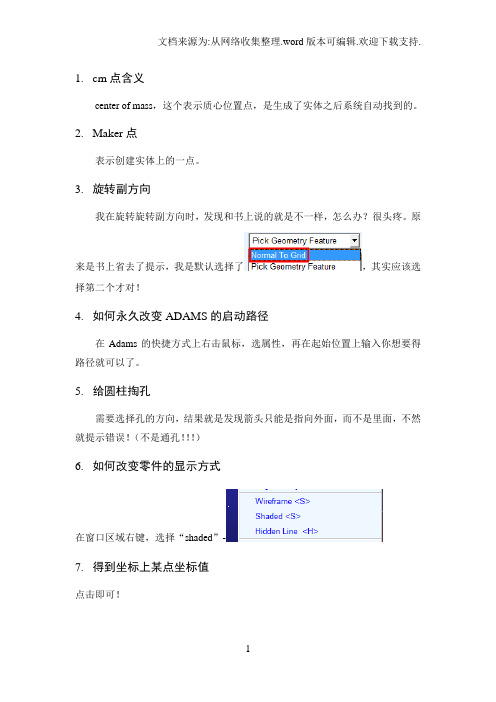
1.cm点含义center of mass,这个表示质心位置点,是生成了实体之后系统自动找到的。
2.Maker点表示创建实体上的一点。
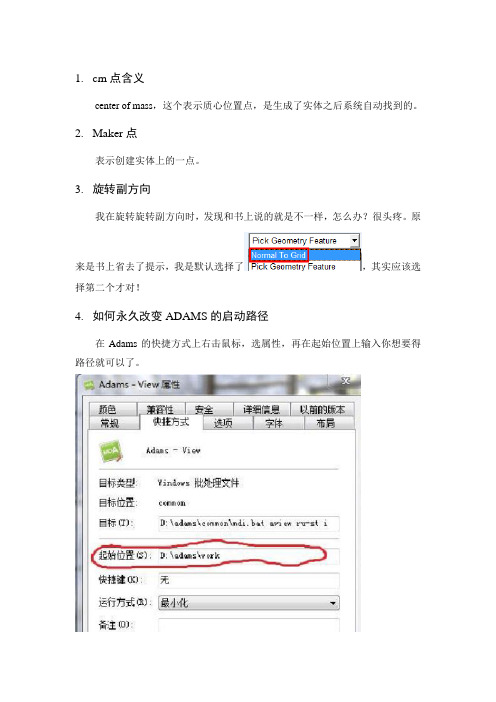
3.旋转副方向我在旋转旋转副方向时,发现和书上说的就是不一样,怎么办?很头疼。
原来是书上省去了提示,我是默认选择了,其实应该选择第二个才对!4.如何永久改变ADAMS的启动路径在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
5.给圆柱掏孔需要选择孔的方向,结果就是发现箭头只能是指向外面,而不是里面,不然就提示错误!(不是通孔!!!)6.如何改变零件的显示方式在窗口区域右键,选择“shaded”-7.得到坐标上某点坐标值点击即可!8.旋转方向添加旋转驱动之时,发现不能添加“-”,加了也没有用!!!变黄色表示警告,添加没有用!只能通过modify来修改。
单位为每秒钟旋转的度数。
修改之后要先保存,再仿真。
9.Maker点与point点区别都可以设为part上的点,但是标记点的作用是便于添加运动副的!!!Point 也可以!但是呢,改变point坐标,原来构件会跟着移动,改变maker点坐标呢,只会是改变它在构件上的不同位置。
10.Point-to-point measure可以测出两点之间的位移、速度及加速度随时间变化曲线!两个点可以随便取,也没有先后要求,主要是根据自己的需要而定。
选择可以测量三点之间的角度随时间变化的情况!11.solidworks模型导入adams中1、在solidworks中把零件或组件另存为parasolid格式,版本最好选12.0以下,文件名和保存路径不能出现中文字符。
2、把.x_t改为.xmt_txt,这一步很重要。
3、在adams中的import选择文件类型,指向文件,如果是组件就选model name,如果为零件就选part name,在后面的空格里单击右键,选part或model,再选create,可以改名字。
adams仿真报错解读

adams仿真报错解读
Adams仿真报错可能有多种原因,需要具体情况具体分析。
一
般来说,Adams仿真报错可能是由于模型设置问题、初始条件问题、边界条件问题、数值稳定性问题等引起的。
下面我将从几个可能的
原因进行解读。
首先,模型设置问题可能导致Adams仿真报错。
在建立模型时,可能存在参数设置错误、约束条件错误、初始条件设定不合理等问题,这些都可能导致仿真报错。
解决这类问题需要仔细检查模型的
各项设置,确保其符合实际物理情况。
其次,初始条件问题也可能导致Adams仿真报错。
如果初始条
件设置不合理,例如初始速度过大、初始位移设定错误等,都可能
导致仿真报错。
解决这类问题需要对初始条件进行仔细检查和调整。
另外,边界条件问题也是常见的导致Adams仿真报错的原因之一。
如果边界条件设置不合理,例如边界约束条件错误、边界载荷
设定错误等,都可能导致仿真报错。
解决这类问题需要对边界条件
进行仔细检查和调整。
此外,数值稳定性问题也可能导致Adams仿真报错。
在仿真过程中,数值稳定性是一个非常重要的问题,如果数值积分步长选择不合理、数值积分算法选择不当等,都可能导致仿真报错。
解决这类问题需要对数值积分参数进行仔细调整。
综上所述,Adams仿真报错可能由多种原因引起,需要具体情况具体分析。
在解决报错问题时,需要对模型设置、初始条件、边界条件和数值稳定性等方面进行全面的检查和调整,以确保仿真能够顺利进行。
希望以上解读能帮助你更好地理解Adams仿真报错问题。
最近碰到的几个ADAMS问题及解决方法

最近碰到的几个ADAMS问题及解决方法教研室的人走的差不多了,顿时冷清了很多,哥们再熬两天就可以回家过年了,人心散了,队伍不好带了,没什么大事正好写写博客。
下面写写最近这几天做ADAMS仿真碰到的几个小问题。
No.1、ADAMS启动不出现欢迎界面我在将SolidWoks中的三维模型导入ADAMS的时候发现我的台式机上启动的时候不出现欢迎界面,就是如图1所示的界面不出来,类似的问题网上也有人碰到过。
照参考2上的说法,找到X:\MSC.Software\MSC.ADAMS\2005\aview,X 为安装盘,右键其中的aviewAS脚本文件,编辑,出现如图2所示的内容,将interface前面!去掉即可,我想起来是为了做联合仿真的时候不出现启动界面遮住图像,在前面添加的一个!号。
图1 ADAMS启动欢迎界面图2 aviewAS内容No.2、隐藏物体如何重新显示为了方便模型操作,我将ADAMS中的一个物体给隐藏了,结果最后愣是找了半天没有恢复为可见,依然百度之,edit->appearance->data navigator,选中要进行显示的物体,注意的是不要将物体点开选择下面的SOLID之类的,出现物体的时候点选,点击下面的OK,在出现的edit appearance对话框中将Visibility改为on即可。
No.3、导入spline曲线时的对话框设置借鉴郭卫东的那本书,我将驱动关节的曲线在matlab中做了出来,然后保存为txt文件,第一列为时间,第二列为数值,其导入txt生成spline曲线的对话框设置如图3所示。
刚开始的时候仿真提示出错,问题是第一列的时间不是严格递增的,在matlab中修改时间的产生,并写了一个小程序验证其时间是严格递增的,在导入第一个spline曲线的时候没有问题,后来导入第二个spline 的时候问题出现了,说我的时间不是严格递增的,查看spline_2发现数值列成了时间X,我意识到可能是设置的spline的生成方式不对,根据参考[4]中的说法,在图3的界面中Independent Column Index是指定哪一列为自变量时间,其他的列为纵坐标,不填的话表示以1、2、3……为自变量,而我想当然的认为这个对话框中填入的是spline曲线的序号,在生成spline_2的时候,填的是2,这样数值列就变成时间X了。
ADAMS使用心得 五
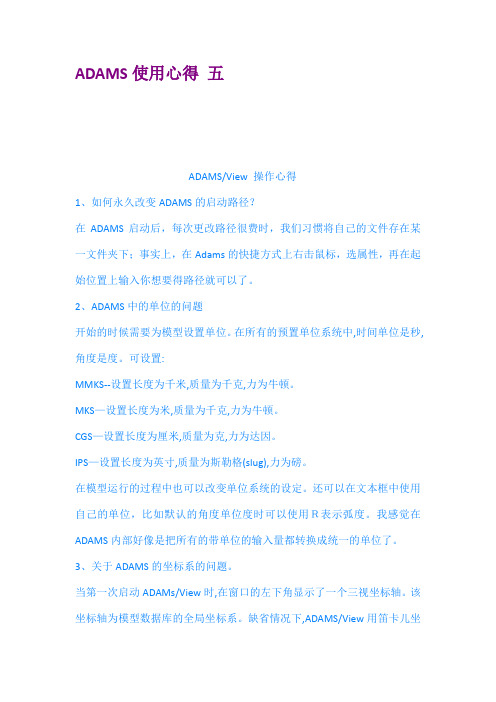
ADAMS使用心得五ADAMS/View 操作心得1、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、ADAMS中的单位的问题开始的时候需要为模型设置单位。
在所有的预置单位系统中,时间单位是秒,角度是度。
可设置:MMKS--设置长度为千米,质量为千克,力为牛顿。
MKS—设置长度为米,质量为千克,力为牛顿。
CGS—设置长度为厘米,质量为克,力为达因。
IPS—设置长度为英寸,质量为斯勒格(slug),力为磅。
在模型运行的过程中也可以改变单位系统的设定。
还可以在文本框中使用自己的单位,比如默认的角度单位度时可以使用R表示弧度。
我感觉在ADAMS内部好像是把所有的带单位的输入量都转换成统一的单位了。
3、关于ADAMS的坐标系的问题。
当第一次启动ADAMs/View时,在窗口的左下角显示了一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/View将全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置,ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、关于物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过MODIFY物体的position属性;令一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
adams基础问题_值得学习
经过不知道多少个日夜,终于出来一个雏形了,内容主要是版内的帖子总结,这个为1.0版本,由于时间的问题,内容还不全,以后将不断完善,请大家多多支持![color=Red]严重申明:此贴版权归simwe全体adams会员,此帖谢绝灌水,故暂时锁贴![/color]大纲如下:1.adams软件介绍2.adams学习书籍3.软件安装问题4.常见基础问题4.1一般问题4.2有关齿轮副4.3有关凸轮副4.4蜗轮蜗杆模拟4.5有关行星齿轮传动4.6spline5.常用函数5.1函数总体介绍5.2样条函数:akispl,cubspl5.3step函数5.4IF函数5.5impact与bistop函数5.6gforce和sforce函数5.7sensor,acf的应用6.adams与CAD数据转换6.1proe6.2UG6.3catia6.4solidwork6.5其他CAD软件7.flex相关7.1autoflex8.MATLAB和ADAMS联合仿真篇[[i] 本帖最后由andyxin 于2006-12-24 23:20 编辑[/i]][color=Red]一、软件介绍篇[/color]ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。
1973年Mr. Michael E. Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。
密西根大学对ADAMS 发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。
adams新手学习
对于初学的人来说,方向的描述不太容易理解。之前我们都是用方向余弦之类的量来描述方向的。在ADAMS中,为了求解方程是计算的方便,使用欧拉角来描述方向。就是用绕坐标轴转过的角度来定义。旋转的旋转轴可以自己定义,默认使用313,也就是先绕z轴,再绕x轴,再绕z轴。
6、Marker点与Pointer点区别
5.6gforce和sforce函数
5.7sensor,acf的应用
6.adams与CAD数据转换
6.1proe
6.2UG
6.3catia
6.4solidwork
6.5其他CAD软件
7.flex相关
7.1autoflex
8.MATLAB和ADAMS联合仿真篇
一、软件介绍篇
ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。1973年Mr. Michael E. Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。2002年3月18日MSC.Software公司并购MDI公司,自此ADAMS并入MSC产品线名称为MSC.ADAMS(本文仍简称ADAMS)。
Marker:具有方向性,大部分情況都是伴随物件自动产生的,而Point不具有方向性,都是用户自己建立的;Marker点可以用来定义构件的几何形状和方向,定义约束与运动的方向等,而Point点常用来作为参数化的参考点,若构件与参考点相连,当修改参考点的位置时,其所关联的物体也会一起移动或改变。
adams心得体会

adams心得体会Adam's心得体会在我参加工作以来,我积累了一些宝贵的经验和体会。
这些经验不仅仅指业务上的技巧和知识,更包括了与人相处、自我成长以及职场发展等方面的体悟。
在这篇文章中,我将分享一些对于工作和生活的心得体会。
1. 保持积极的心态工作遇到挑战和困难是非常常见的,但是保持积极的心态对于克服困难至关重要。
我发现,当我面对问题时,如果能够积极乐观地面对,找到解决问题的方法,事情往往会变得更加顺利。
同时,积极乐观的态度也能够影响到周围的人,营造良好的工作氛围。
2. 学会与他人合作在现代职场中,合作能力是非常重要的。
与他人合作不仅能够提高工作效率,还能够培养团队精神和沟通能力。
我学会了倾听他人的意见,学会尊重他人的观点,并且学会在团队中发挥我的优势,为团队的目标而努力。
3. 不断学习与成长我相信持续学习和个人成长是取得成功的关键。
在这个快速发展的时代,技术和知识都在不断更新换代,只有紧跟时代的脚步,不断学习新知识和技能,才能够在职场中立于不败之地。
我养成了每天学习的习惯,通过阅读书籍、参加培训和与同行交流的方式,不断提升自己。
4. 保持工作与生活的平衡在工作和生活之间保持平衡是非常重要的。
过度工作可能会导致身心疲惫,而忽略了生活中的乐趣和家庭的重要性。
我学会了给自己留出休息和放松的时间,让我能够更好地面对工作中的压力,并且更加享受生活。
5. 积极迎接变化职场是一个充满变化的地方,我们必须学会适应和应对变化。
我发现,积极主动地面对变化,能够更好地提升自己的适应能力和灵活性。
同时,变化也是机遇,我们要善于抓住机会,勇于创新,不断寻找到更好的方法和解决方案。
在这篇文章中,我分享了一些我在工作中的心得体会。
保持积极的心态,学会与他人合作,持续学习与成长,保持工作与生活的平衡,积极迎接变化,这些都是我在职场上的宝贵经验。
我相信,只要我们不断努力学习和改进自己,我们一定能够取得更大的成就。
让我们一起努力,为更美好的未来而奋斗!。
Adams问题集
1.cm点含义center of mass,这个表示质心位置点,是生成了实体之后系统自动找到的。
2.Maker点表示创建实体上的一点。
3.旋转副方向我在旋转旋转副方向时,发现和书上说的就是不一样,怎么办?很头疼。
原来是书上省去了提示,我是默认选择了,其实应该选择第二个才对!4.如何永久改变ADAMS的启动路径在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
5.给圆柱掏孔需要选择孔的方向,结果就是发现箭头只能是指向外面,而不是里面,不然就提示错误!(不是通孔!!!)6.如何改变零件的显示方式在窗口区域右键,选择“shaded”-7.得到坐标上某点坐标值点击即可!8.旋转方向添加旋转驱动之时,发现不能添加“-”,加了也没有用!!!变黄色表示警告,添加没有用!只能通过modify来修改。
单位为每秒钟旋转的度数。
修改之后要先保存,再仿真。
9.Maker点与point点区别都可以设为part上的点,但是标记点的作用是便于添加运动副的!!!Point 也可以!但是呢,改变point坐标,原来构件会跟着移动,改变maker点坐标呢,只会是改变它在构件上的不同位置。
10.Point-to-point measure可以测出两点之间的位移、速度及加速度随时间变化曲线!两个点可以随便取,也没有先后要求,主要是根据自己的需要而定。
选择可以测量三点之间的角度随时间变化的情况!11.solidworks模型导入adams中1、在solidworks中把零件或组件另存为parasolid格式,版本最好选12.0以下,文件名和保存路径不能出现中文字符。
2、把.x_t改为.xmt_txt,这一步很重要。
3、在adams中的import选择文件类型,指向文件,如果是组件就选model name,如果为零件就选part name,在后面的空格里单击右键,选part或model,再选create,可以改名字。
ADAMS 静平衡出错,常用的解决方法

以下是我通过阅读相关资料,所做的笔记,也有些是自己的体会。
如有不当望指正。
写在这是为了加深自己的印象,同时也和大家一起分享和共勉。
Adams建立一系列的力-位移的非线性微分方程,然后利用逐步迭代的办法来求解静平衡位置。
当静平衡失败的时候,我们常常要对静平衡的设置做一些改变,从而使得节约计算时间和成功计算静平衡位置。
1:Alimt和Tlimt是我们经常需要改变大小的参数。
Alimt是每次迭代的最大角位移增量(单位为rad,因为adams在返回角度值时通常单位为rad,比如建立一个measure其默认的单位都是rad,而不论系统角度单位为弧度或者度);Tlimt是每次迭代的最大线位移增量。
当我们尝试改变这两个参数值时候,应该综合考虑我们模型中的长度单位、和系统到达静平衡位置时可能的最大线位移和角位移(rad)。
比方说:我们设置的alimt为1,而模型中使用的长度单位为mm,那么adams在计算时候所允许每次迭代的最大线位移为1mm。
如果此时,系统到达静平衡位置需要的线位移为1M,那么adams在计算过程中则至少需要迭代1000mm/1mm,即1000次之久,显然这是不合理的。
而且如果设置得过大,当平衡位置不只一个时,就很可能造成所求的位置并不是迭代次数最少的平衡位置。
同样的如果我们设置的最大角位移增量为50RAD,而系统达到静平衡位置所需要的角位移增量为7rad,这时,迭代1次就可能超过了静平衡位置,也是不合理的。
因此在选择Alimt和Tlimt的值时,即不能太小也不能太大。
当我们很难确定其值的时,就只有不断的加以测试。
2:stability参数的调整:将质量与阻尼阵比例添加到刚度阵的系数。
这可以避免随遇稳定系统的雅克比矩阵奇异。
在大多数情况下,我们不需要对此参数进行调整。
但是当我们系统包含有小质量的随遇静平衡物体时,适当增加此系数值,可以有助于收敛。
比方说:一个质量很小的球放在平板上,在系统达到静平衡之前会有一系列的迭代求解,如果此时我们适当增加stability的参数值如提高到1E-3,将有助于收敛,避免雅克比矩阵的奇异,当然也会增加我们的计算时间。
ADAMS-静平衡出错-常用的解决方法
这两个参数主要是对静平衡计算时,精度的调整。
Error:达到静平衡时所允许的位移误差,增加则精度下降,有助于静平衡收敛。;
Imbalance:达到静平衡时合力的平衡误差(每次迭代的时候,adams会将力、力矩的绝对值进行总和,其总和值就是这里的imbalance)
以下是我通过阅读相关资料,所做的笔记,也有些是自己的体会。如有不当望指正。写在这是为了加深自己的印象,同时也和大家一起分享和共勉。
Adams建立一系列的力-位移的非线性微分方程 ,然后利用逐步迭代的办法来求解静平衡位置。当静平衡失败的时候,我们常常要对静平衡的设置做一些改变,从而使得节约计算时间和成功计算静平衡位置。
同样的如果我们设置的最大角位移增量为50RAD,而系统达到静平衡位置所需要的角位移增量为7rad,这时,迭代1次就可能超过了静平衡位置,也是不合理的。
因此在选择Alimt和Tlimt的值时,即不能太小也不能太大。当我们很难确定其值的时,就只有不断的加以测试。
2:stability参数的调来自:将质量与阻尼阵比例添加到刚度阵的系数。这可以避免随遇稳定系统的雅克比矩阵奇异。
打造全网一站式需求
比方说:我们设置的alimt为1,而模型中使用的长度单位为mm,那么adams在计算时候所允许每次迭代的最大线位移为1mm。如果此时,系统到达静平衡位置需要的线位移为1M,那么adams在计算过程中则至少需要迭代1000mm/1mm,即1000次之久,显然这是不合理的。而且如果设置得过大,当平衡位置不只一个时,就很可能造成所求的位置并不是迭代次数最少的平衡位置。
在大多数情况下,我们不需要对此参数进行调整。但是当我们系统包含有小质量的随遇静平衡物体时,适当增加此系数值,可以有助于收敛。
adams_matlab问题总结
adams_matlab问题总结Matlab7.1+ADAMS2005仿真步骤与调试经验参照SimWe中wxd等大牛关于联合仿真帖子,最近也做了一些联合仿真,遇到了不少困难,最后得到的结果还令人满意,深切体会到联合仿真在机电系统控制分析中的作用,下面将自己的一些笔记整理后与大家共享,作为对SimWe的回报,其中有不少错误和问题应该是新手都比较容易遇到的,希望可以对大家有所帮助。
1.建立Adams仿真模型,设文件名为Adams.bin和Adams.biq 并进行初步仿真,验证其合理性。
2.在Matlab中建立控制模型,进行单独仿真,确保控制模型的正确性。
3.新建立一个仿真文件夹,比如Adams_Matlab,将Adams.bin 和Adams.biq文件copy到该文件夹下;将…\MSC.ADAMS\2005\Win32\文件夹中的adams_plant.dll文件和…\MSC.ADAMS\2005\Controls->Win32\下的plant.lib文件也Copy到该文件夹下(仿真中经常因为路径问题出错,有不少关于路径设定的帖子,本帖子中的方法已经过验证,优点是文件集中,便于统一管理)。
4.打开Adams.bin文件,注意,打开文件时,选择“Open an existing database”后,一定要将下边的“Start in”设置到…\Adams_Matlab\文件夹,确保生成的*.m(假设文件名为simwe.m)等4个文件在该文件夹中,避免不必要的麻烦。
5.Adams->Controls->Plant Export,设定输入变量和输出变量以及文件名等。
详见郑建荣的“ADAMS—虚拟样机技术入门与提高”等书;也可以查看Adams的Help->Other Product Help->ADAMS/Controls中的Examples等帮助,看帮助文件的好处是消除了版本不同所带来的局限,例如在Adams2003以上的版本中对输入变量和输出变量的设置需要借助PINPUT_1和PINPUT_1等中间变量,与基于ADAMS12及以下版本的书中描述的不同。
学习adams时的常见问题总结
14、如何在ADAMS下由数据生成样条曲线?在tools->command navigator....->Data element->create->spring line 后,会出現一个输入window窗口,选择numerical将xyz数值copy到xyz各自的表格上.......15、ADAMS中如何建模,该如何控制坐标点,才能得到精确的位置?可以粗略建立 Point 设计点后,可以 Modify,在表格编辑器 Table Editor 里可以精确定位点的坐标,还可以用Command。
16、关于bushing16.1、bushing一般用于模拟橡胶连接部件,主要是指线性橡胶。
一般汽车底盘的轴承都有加橡胶,那就可以在轴和轴承之间用这个。
输入在各个方向的刚度和阻尼就可以了。
16.2、bushing主要是考虑到了两个物体间的弹性连接,比如麦弗逊悬架的下控制臂和副车架,幅车架和车身相连的地方都是采用了bushing,在car里面就可以看到。
对于运动学分析,采用一般的连接即可(比如万向节),做动力学分析,就得采用busing以模拟弹性力。
17、请问如何对零件进行复制?可用position move,还有一个命令是position rotation。
18、关于转动问题,如何判断转动副的方向?初学时,对转动副的运动容易糊涂,下面以图说明。
图1,构件4固定在地面上,在构件1和构件2上加了一个转动副。
1) 转动副中构件绕轴转动的方向,符合右手法则,其中First body 绕Second body 转动;2) 图一中,构件1为first body,构件2为Second Body,则构件1相对于构件2逆时针转动,图2为转动后某时刻的图像;3) 若修改转动副,构件2为first body,构件1为Second Body,则构件2相对于构件1逆时针转动,图3为转动后某时刻的图像,与2)恰相反;4) 有趣的是,假设转动副加在构件1与4上,构件4为first body,构件1为Second Body,则构件4应该相对于构件1逆时针转动,但由于构件4固定在地面上,无法运动,由相对运动可知,此时运动等价于构件1相对于构件4顺时针转动,事实如此,图4为转动后某时刻的图像。
adams疑难问题合集
adams疑难问题合集(讨论)fixit註冊使用者註冊日期: May 2006住址: MSC.Softwar e Taiwan文章: 249接触adams一段时间了,一直都在不断克服问题中前进,有苦恼更有喜悦,我想大多数初学者都有这样的感受。
最近在做设计中碰到几个问题,提出来和各位讨论一下,请指点!1. 将测量结果保存为样条曲线的问题。
这样做的目的是将样条曲线作为驱动,去约束其它物体的运动。
是不是在后处理程序中output?我试了几次都没成功,导出的结果都不是样条曲线,该怎么选项?2. step函数和step5函数的使用。
这两个函数比较简单应用也最广泛,但是什么场合下用step什么场合下适合用step5,不知大家怎么考虑。
另为自变量单位的问题,如果不注明就是默认设置的单位,如果需要单位是角度就要输入d:例如:step(time,0,0,0.5,2.3)step(time,0.49,0,0.5,2.3d)。
是这样吗?如果想要设置其它单位,该怎么设置?3. 验证模型的问题模型建立好后,验证模型,系统提示的结论:There are 6 redundant constraint equations.Model verified successfully.疑问是,冗余的约束方程一般是怎样产生的,对仿真会产生什么影响,该怎样处理?后续的运动学仿真我都已经做成功,但始终觉得它们是隐藏在某处的6个炸弹,不知道什么时候会引爆。
4. 液压模块我感觉adams的液压模块作的不是很成功,在这部分我下了不少功夫,但是仿真始终不理想。
机械模型正确,但是一连液压模型就出问题,而且问题还很难排查,不知道各位学友怎么看待。
你们有什么经验或建议请提一下。
一口气提了这么几个问题,希望大家一起讨论一下,共同进步!05-25-2006, #205:53 PM 回覆: adams 疑难问题合集(讨论) patrick管理員註冊日期: Mar 2002住址: MSC 台灣分公司文章: 1525A1: 在後處理選擇table 的方式輸出曲線就可以了. A2. step 函數是一階連續, step5函數則是二階連續. 在給定motion 時, 適合使用step5 A3. 如果有redundant constraint, 在那些自由度的constraint 會被adams 自動釋放,所以約束力會不正確.。
adams心得
adams心得碰到问题及时解决——有了心得及时总结ADAMS专题1、ADAMS操作自动复制的问题在ADAMS里面操作模型时突然弹出Database Navigator,关掉后,只要在进行旋转,平移,放大缩小等操作就又会自动弹出Database Navigator,如果我选择了某一物体,Database Navigator是不会弹出的,旋转操作后该物体会在原地复制,而且鼠标会变成其他形状,这是软件的冲突问题,与有道词典有冲突,关掉有道就好了。
2、保存当前显示设置和其他任何设置主菜单的setting-save setting就可以。
在ADAMS下次启动时就会预先读取这个文件,没有时在读取模板文件,这样就可以按照自己的风格设置了。
恢复默认的方法是setting-restore settings.3、简单的测量方法在显示坐标窗口的前提下,选择测量的起始点,按住数遍拖动到目标点,这时距离就会在坐标栅格中显示。
如果打开栅格,则是最进的两个栅格点;如没有打开,则就是这之间的实际距离。
4、辅助信息的显示和隐藏辅助信息包括工作栅格(working grid),对象图标(screen icons),视图方向坐标(view triad),视图标题(view title)。
共有两种方法:1、view-view accessories选择相应的对象即可;2、使用主工具箱的切换工具集。
5、常用的快捷方式F全屏显示T平移R旋转Z动态缩放W窗口缩放C指定旋转中心S沿垂直平面轴旋转G栅格的显隐V图标的显隐M打开信息窗口ESC结束当前操作F1帮助F2读取命令文件F3命令输入窗口F4坐标窗口F8后处理模块选择时按住ctrl键可以暂时取消捕捉6、对于大型的修改,可以利用数据库浏览器或者8、单击右下角i时的不同显示问题选中元素的情况下,会弹出没有选中的情况下,弹出数据库浏览器9、solidworks导入ADAMS的经验总结步骤总结如下:1、在solidworks中把零件或组件另存为parasolid格式,版本最好选12.0以下,文件名和保存路径不能出现中文字符。
ADAMS学习心得

ADAMS学习心得1、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
2、如何将回放过程保存为AVI格式的电影文件,以便在其他场合使用?点击plotting(或F8)进入postprocessor ,右键--load ANIMATION,点击"play"开始仿真,点击"record"开始录制动画。
3、a/car Template Builder.为什么我看不见这个菜单选项??答:需要改一下的!在你的系统盘下去面。
例如我的C:\Documents and Settings\rickytang(rickytang为我的用户名)下面有一个.acar文件,用记事本打开,然后将! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE standard改为:! Desired user mode (standard/expert) ENVIRONMENT MDI_ACAR_USERMODE expert再启动car就可以看见选项了!进入car后按F9或者在tools下面选第一项就可以在模板与标准界面之间切换!4、关于communicatorcommunicator的出现是由于car是分块建模(子系统)为基础,而communicator 告诉ADAMS软件子系统之间如何连接,所以communicator的名字要完全一样才行,而且对于某一特定的子系统而言,有多少与外部系统、testrig的连接就需要有多少个communicator。
suspension parameter代表悬架特性反映,可参考公用模板中_trailing_arm.tpl和_multi_link.tpl。
ADAMS常见问题
ADAMS使用常见问题1、ADAM中的单位的问题开始的时候需要为模型设置单位。
在所有的预置单位系统中, 时间单位是秒, 角度是度。
可设置:MMKS-设置长度为毫米,质量为千克,力为牛顿。
MK—设置长度为米,质量为千克,力为牛顿。
CG—设置长度为厘米,质量为克,力为达因。
IPS—设置长度为英寸,质量为斯勒格(slug),力为磅。
2、如何永久改变ADAM的启动路径?在ADAM启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
3、关于ADAM的坐标系的问题。
当第一次启动ADAMs/View时,在窗口的左下角显示了一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/VieW各全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置,ADAMS/View也可返回如零件的位置零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、关于物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过MODIFY物体的positio n属性;令一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
5、关于ADAM中方向的描述。
对于初学的人来说,方向的描述不太容易理解。
之前我们都是用方向余弦之类的量来描述方向的。
在ADAM中,为了求解方程是计算的方便,使用欧拉角来描述方向。
ADAMS 静平衡出错,常用的解决方法
以下是我通过阅读相关资料,所做的笔记,也有些是自己的体会。
如有不当望指正。
写在这是为了加深自己的印象,同时也和大家一起分享和共勉。
Adams建立一系列的力-位移的非线性微分方程,然后利用逐步迭代的办法来求解静平衡位置。
当静平衡失败的时候,我们常常要对静平衡的设置做一些改变,从而使得节约计算时间和成功计算静平衡位置。
1:Alimt和Tlimt是我们经常需要改变大小的参数。
Alimt是每次迭代的最大角位移增量(单位为rad,因为adams在返回角度值时通常单位为rad,比如建立一个measure其默认的单位都是rad,而不论系统角度单位为弧度或者度);Tlimt是每次迭代的最大线位移增量。
当我们尝试改变这两个参数值时候,应该综合考虑我们模型中的长度单位、和系统到达静平衡位置时可能的最大线位移和角位移(rad)。
比方说:我们设置的alimt为1,而模型中使用的长度单位为mm,那么adams在计算时候所允许每次迭代的最大线位移为1mm。
如果此时,系统到达静平衡位置需要的线位移为1M,那么adams在计算过程中则至少需要迭代1000mm/1mm,即1000次之久,显然这是不合理的。
而且如果设置得过大,当平衡位置不只一个时,就很可能造成所求的位置并不是迭代次数最少的平衡位置。
同样的如果我们设置的最大角位移增量为50RAD,而系统达到静平衡位置所需要的角位移增量为7rad,这时,迭代1次就可能超过了静平衡位置,也是不合理的。
因此在选择Alimt和Tlimt的值时,即不能太小也不能太大。
当我们很难确定其值的时,就只有不断的加以测试。
2:stability参数的调整:将质量与阻尼阵比例添加到刚度阵的系数。
这可以避免随遇稳定系统的雅克比矩阵奇异。
在大多数情况下,我们不需要对此参数进行调整。
但是当我们系统包含有小质量的随遇静平衡物体时,适当增加此系数值,可以有助于收敛。
比方说:一个质量很小的球放在平板上,在系统达到静平衡之前会有一系列的迭代求解,如果此时我们适当增加stability的参数值如提高到1E-3,将有助于收敛,避免雅克比矩阵的奇异,当然也会增加我们的计算时间。
Adams使用问题集锦

Adams使用问题集锦1、如何定义两个marker的相对转动为一个变量,然后把一条已知曲线spline作为驱动,使该变量随时间变化按着这条曲线来进行?答:测量这俩个marker的位移或角度修改motion,用样条函数就可以了这样就可以该变小视角啊!我想要并使引入模型中的一个点和地面坐标系中的零点重合,该怎么办?答:把所有的零件选中做成一个group然后用move工具应该可以把你试一下巴!!在precisionmove对话匡中relocateto后面挑选group下面挑选aboutthemaker就可以了!!下面的c和a你都不必管!!3、怎么样回到一个力矩至matlab里?答:建一个状态变量,然后重复联合仿真的步骤,用这个函数试试先varval(algebraic_variable_name)4、merge和unit有什么区别呢?请问:unit就是分拆两个平行的实体,merge分拆两个不平行的实体。
5、我想要使一个机构的主运动按建议运动,比如阶越运动,怎么就可以加之?基准:时间:0~1,1~2,2~3,3~4;角度:10,30,35,60请问:可以用step函数,仿真time:4ssize:大于0.05step(time,0,0,0.05,10d)+step(time,1,0,1.05,20d)+step(time,2,0,2.05,35d)+step(time,3,0,3.05,65d)6、在adams/view中,如何将postprocessor中所有的仿真结果保存下来?答:可用下面两种方法:(1)、先仿真,分解成一系列的.req,.res文件。
然后关上:我的程序――adams――apostprocessor――adams-postprocessor;在file菜单下选择selectdirectory,选择结果文件所在的文件夹为指定保存目录,然后从file――import读入.req,或.res文件等等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
14、如何在ADAMS下由数据生成样条曲线?在tools->command navigator....->Data element->create->spring line 后,会出現一个输入window窗口,选择numerical将xyz数值copy到xyz各自的表格上.......15、ADAMS中如何建模,该如何控制坐标点,才能得到精确的位置?可以粗略建立 Point 设计点后,可以 Modify,在表格编辑器 Table Editor 里可以精确定位点的坐标,还可以用Command。
16、关于bushing16.1、bushing一般用于模拟橡胶连接部件,主要是指线性橡胶。
一般汽车底盘的轴承都有加橡胶,那就可以在轴和轴承之间用这个。
输入在各个方向的刚度和阻尼就可以了。
16.2、bushing主要是考虑到了两个物体间的弹性连接,比如麦弗逊悬架的下控制臂和副车架,幅车架和车身相连的地方都是采用了bushing,在car里面就可以看到。
对于运动学分析,采用一般的连接即可(比如万向节),做动力学分析,就得采用busing以模拟弹性力。
17、请问如何对零件进行复制?可用position move,还有一个命令是position rotation。
18、关于转动问题,如何判断转动副的方向?初学时,对转动副的运动容易糊涂,下面以图说明。
图1,构件4固定在地面上,在构件1和构件2上加了一个转动副。
1) 转动副中构件绕轴转动的方向,符合右手法则,其中First body 绕Second body 转动;2) 图一中,构件1为first body,构件2为Second Body,则构件1相对于构件2逆时针转动,图2为转动后某时刻的图像;3) 若修改转动副,构件2为first body,构件1为Second Body,则构件2相对于构件1逆时针转动,图3为转动后某时刻的图像,与2)恰相反;4) 有趣的是,假设转动副加在构件1与4上,构件4为first body,构件1为Second Body,则构件4应该相对于构件1逆时针转动,但由于构件4固定在地面上,无法运动,由相对运动可知,此时运动等价于构件1相对于构件4顺时针转动,事实如此,图4为转动后某时刻的图像。
(图片看不到的话,可在版内搜索到该帖子)19、用不同的求解器是不是不会对结果造成太大的影响?求解器不会对仿真结果造成影响的。
由于ADAMS的求解器最初是用FORTRAN编写的,而随着C的普及及功能的强大,现在越来越倾向于C了。
现在是两个求解器并存,将来可能只保留C一个了。
在ADAMS新的版本中,有些功能只有C求解器才有的。
20、出现exception 11 detected如何解决?開始->程式集->MSC.Software->MSC.ADAMS 2005r2->ADAMS Settings->在Shared->Graphics_Driver, 選擇Hoops21、接触的那些系数是什么意思?该怎么填写啊?/forum/viewthread.php?tid=732823&extra=page%3D1%26f ilter%3Ddigest22、碰撞力的测量?使用postprocessor绘制出contact force curve,是比较简单的;若要在view环境下进行显示,其流程较为复杂:buid| measure | Function| Force object | contact force/forum/viewthread.php?tid=354246&highlight=%C5%F6%D 7%B2%C1%A6%2B%B2%E2%C1%BF23、如何创建齿轮副?关键是齿轮副定义的joint和marker点需要定义在一个物体上,基本上就是这样。
如定义一个简单gear,所用了两个revolution joint1和2,joint1定义了part1和ground,joint2定义了part2和ground,marker点定义在ground上,marker的Z轴方向应指向齿轮的啮合线方向,该marker位于啮合点上,才能成功的建立齿轮副。
定义行星轮也是同样,建立在齿轮副中需要用到的joint和marker点都必须在同一物体上,不管这个物体是ground还是自建的part。
24、请教:行星齿轮副该怎么加/forum/viewthread.php?tid=37124825、请教如何在adams里构建齿轮副?/forum/viewthread.php?tid=22522&highlight=%B3%DD%C2 %D6%B8%B126、PROE中如何建立凸轮副?26.1、在PRO/E里面做一个凸轮,和一顶杆.26.2、沿凸轮的外边圆做一条曲线(一般是外边缘偏移出),26.3、在顶杆顶端(以后与凸轮接触那点).做一个marker点.26.4、新建一个装配文件,同时做一基座零件(装配凸轮和顶杆之用),将凸轮和顶杆装配好,加上必要的约束(凸轮的铰链,和顶杆的移动副)同时在铰链上增加一马达(同时设置好必要的参数).26.5、关键一步是:在SET UP MECHANISM下选择DATA ELEMENTS,再选择CURVE,选择第2步所做的曲线,创建一条曲线(用以约束顶杆是的MARKER只用.26.6、然后从约束里面选种POINT ON CURVE 分别NAME,CONSTRAINED LACATINON(选MARKER点),CONSTRAINED FIGID BODY(选顶杆),SELECT EXISTING CURVE(选刚创建的曲线).26.7、创建成功后就可以看结果了27、从pro/e导入的凸轮副如何设置?方法一:A、首先分别在prt图里对凸轮以及从动件用“使用边”命令做出曲线,保存好b、在set up----data elements----curves-create........选用from geometry 等,做好2个curvesc、后面的工作都可以在mech/pro里直接设置,凸轮副curve-to-curve也一样。
方法二:可以从两个方面来做这个:a、用碰撞来实现导入的凸轮运动;b、在mechpro中将运动副定义好;c、在proe中做一个凸轮的曲线,导出igs格式,再导入到adams中。
将IGS格式的曲线转化为ADAMS的spline。
就可以在这个上面定义凸轮副了。
具体的实现过程可以参考MSC的KB:/kb/results_kb.cfm?S_ID=1-KB836228、凸轮副如何加约束?见帖子:/forum/viewthread.php?tid=465823&highlight=%CD%B9%C 2%D6%B8%B129、用ADAMS进行蜗轮蜗杆模拟仿真示例见帖子:/forum/viewthread.php?tid=751016&highlight=%CE%CF%C 2%D630、用关联副模拟蜗轮蜗杆:见帖子:/forum/viewthread.php?tid=375799&highlight=%CE%CF%C 2%D631、【原创】Adams中的蜗轮蜗杆实现原理见帖子:/forum/viewthread.php?tid=178785&page=1#pid17879032、一种行星齿轮传动建模方法[经验分享]/forum/viewthread.php?tid=744971&extra=page%3D4%26f ilter%3Dtype%26typeid%3D5633、数据文件如何生成spline?用输入的方式。
file-import-,打开如图所示的对话框,照图中所示的选项就可以输入数据了。
将你原来产生的数据作为test data输入,这种方法比较简单实用。
数据文件中存放数据有一定的格式,建议参考一下帮助文件view_ex.pdf的40到46页。
[attach]107945[/attach]34、如何使用spline编辑器?选中spline右键进行modify即可,如下图35、如何添加轨迹线?Review | create Trace Spline36、有两种方式定义力的方向:a、沿两点连线方向定义;b、沿标架一个或多个轴的方向。
常用函数介绍篇(一)、adams函数总体介绍1、ADAMS/View™ 是MDI公司出品的动力学仿真模块,提供了强大的建模与仿真环境。
用户可以应用该模块对任何一个机械系统进行建模与仿真。
除此之外,还可以通过函数编辑器编写表达式、函数和子程序,以实现对力、测量和运动的定义。
在仿真过程中,系统状态实时发生变化,用户能够通过编写运行过程函数实现对系统变量的实时控制。
2、ADAMS/View函数包括设计函数与运行函数两种类型,函数的建立对应有表达式模式和运行模式两种。
表达式模式下在设计过程中对设计函数求值,而运行模式下会在仿真过程中对运行函数进行计算更新。
ADAMS/Solver函数支持ADAMS/View运行模式下的函数,在仿真过程中采用ADAMS/Solver解算时对这些函数进行计算更新。
3、运行时函数(1) 运行时函数在仿真运行过程中被触发载入运行的,设计时函数在程序刚开始启动的时候就被载入,并注册。
运行时函数可用C或者Fortran代码编写,而设计时函数只能用C编写。
(2) ADAMS/View libraries增加已编译过的设计时函数,定义或者修改模型和后处理方式。
ADAMS/Solver libraries为运动和力增加运动时函数,直接定义模型的行为,控制仿真执行的方式。
这样可以使你利用已有的软件定义一些复杂的模型间关系,比如液压力、轮胎力等。
很多模块,ADAMS/View, ADAMS/Car, ADAMS/Engine,和ADAMS/Rail,可以运行这两种库,因为它们有内部的ADAMS/Solver。
(3) 尽管有一点理解上的困难,但子程序比函数表达式提供了更多的一般性和灵活性。
编写一些函数来适应自己的特定需要,链入子程序到ADAMS/Solver,可提高运行效率和仿真速度。
子程序和函数表达式的用途是一样的:给ADAMS/Solver定义非标准的输入。
函数表达式的使用比较容易,但不能描述复杂的问题,尤其是在包含大量的逻辑判断时;而子程序需要编程、编译和链接,比较复杂,但它的功能更强大,用途更广,包括定义模型元素和指定输出。
4、在进行建立表达式、产生和修改需要计算的度量及建立设计函数等操作时,会采用表达式模式。
在建立表达式时,首先在接受表达式的文本框处右击,然后选择“Parameterize”再选择“Expression Euilder”,进入建立设计函数表达式对话框。