基于UG的车桥差速器的运动仿真
案例3 基于UG机械动力学分析-运动仿真

2018/11/7
1.1
打开运动仿真主界面
菜单命令:
【开始】→【运动仿真】
2018/11/7
环境设置
运动学分析:分析仿真机构的运动并 决定机构在约束状态下的位移、速度 、加速度的值的范围
运动学求解需注意以下几点:
软件根据求解时输入的时间与步长的值对模型做动画仿真
外部的载荷与内部的力影响反作用力但不影响运动 连杆和运动付假定都是刚性的 自由度为0 注意:运动学分析时,对有自由度或有初始力的机构结算器不进行求解 ,这类机构需要做动力学分析
2018/11/7
1)旋转副 (Revolute)
可以实现两个相连件绕同一轴作相对的转动
2)滑动副(Slider)
滑块连接是两个相连件互相接触并保持着相对的滑动
3)圆柱副(Cylindrical)
实现了一个部件绕另一个部件(或机架)的相对转动
4)螺纹副(Screw)
实现了一个部件绕另一个部件(或机架)作相对的螺旋运动
副(Joint)相联接,组成运动机构。
2018/11/7
2.1
连杆特性的建立
点击运动仿真工具栏区的连杆特性和
运动副模块中的图标 (Link),系
统将会打开【连杆特性创建】对话框
。 同一对象不能属于两个连杆
2018/11/7
2.2
连杆特性参数的编辑
对各项参数 的编辑与连 杆建立时的 参数设置操
作完全相同
2018/11/7
环境设置
动态分析:如果模型有一个或多个自 由度,必须做动力学分析,在动力学 仿真中,可以在求解方案对话框中选 择静力平衡选项。
静力平衡分析将模型移动到一个平衡 的状态。
基于UG的运动仿真及高级仿真

《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
基于UG的一种汽车驱动桥虚拟装配仿真

摘要随着汽车对安全、节能、环保的不断重视,汽车驱动桥作为整车的一个关键部件,其产品的质量对整车的安全使用及整车性能的影响是非常大的,因而对汽车驱动桥进行有效的优化设计计算是非常必要的。
驱动桥作为汽车四大总成之一,它的性能的好坏直接影响整车性能,而对于汽车显得尤为重要。
当采用大功率发动机输出大的转矩以满足目前载重汽车的快速、重载的高效率、高效益的需要时,必须要搭配一个高效、可靠的驱动桥。
驱动桥一般由主减速器、差速器、车轮传动装置和驱动桥壳等组成。
所以采用传动效率高的单级减速驱动桥已成为未来重载汽车的发展方向。
.本文参照传统驱动桥的设计方法进行了汽车驱动桥的设计。
本文首先确定主要部件的结构型式和主要设计参数;然后参考类似驱动桥的结构,确定出总体设计方案;本文主要基于UG的一种汽车驱动桥虚拟装配仿真。
关键词:驱动桥,主减速器,差速器,半轴,桥壳AbstractTo security, energyconservation, constant attention of environmental protection with the car, the car rear axle is regarded as a key part of the completed car, its product's impact on safe handling and completed car performance of the completed car of quality is very great, therefore is very essential for car rear axle to calculate effective optimization design. The transaxle always becomes as four major cars, the quality of its performance influences the performance of completed car directly, and seem particularly important to the truck. When adopting the highpower engine to output the big torque in order to meet the need of the fast, heavily loaded high benefit with high efficiency of the truck at present, must match ahighefficient, reliable transaxle. The transaxle is generally made up of main decelerator, differential mechanism, transmission device of the wheel and transaxle shell,etc.. Adopt transmission with high efficiency single grade moderate transaxle become future heavily loaded developing direction of car already.With car to security, energyconservation, constant attention of environmental prote ction, car rear axle is regard as a key part of the completed car, its product's impact on safe handling and completed car performance of the completed car of quality is very great, therefore is very essential for car rear axle to calculate effective optimization design. This text has carried on the design of the truck transaxle according to the traditional transaxle design method. This text confirms the structural pattern of the main part and main design parameter at first; Then consult the transaxle like structure, determine the overall design plan; To the main fact finally, the gear wheel of the driven awl, the taper planet gear of the differential mechanism, semiaxis gear wheel, the floating type semiaxis and shelly intensity of integral bridge check and check the lifespan in supporting the bearing completely. It is following to originally design: Because adopt forms central the grades last transaxle,make rear axles whole the of simple structure, manufacturing process is simple, thus big reducing manufacturing cost. And, the single grade of main decelerators of the awl gear wheel of arc tooth has improved the transmission efficiency of the rear axle, have improved the feasibility of the transmission.Key Words: Transaxle , Main decelerator , Differen tial mechanism , Semiaxis , Bridge shell目录摘要 (I)Abstract (II)目录 (III)第 1章绪论 (5)1.1 驱动桥概述 (5)1.2 研究现状和发展趋势 (6)1.3 课题研究方法 (7)1.4 本课题要解决的主要问题和设计总体思路 (7)第 2章 UG的功能与特点分析 (7)2.1 参数化与模块化设计 (7)2.1.1 参数化设计和变量化设计 (7)2.1.2 模块化设计 (8)2.2 UG的功能与特点 (8)2.3 UG NX 产品设计概述 (10)2.3.1 UG NX的工作流程 (10)2.3.2 UG产品设计的一般过程 (11)2.3.3 三维造型的步骤 (11)2.3.4 UG NX 基本操作流程 (12)第 3章汽车驱动桥 3D设计 (12)3.1概述 (12)3.1.1 选择研究对象 (13)3.2建立驱动桥的 3D模型 (14)第 4章汽车驱动桥虚拟装配设计 (58)总结与展望 (64)参考文献 (65)致谢 (66)第 1章绪论1.1 驱动桥概述驱动桥和其他汽车总成一样,除了广泛采用新技术外,在结构设计中日益朝着“零件标准化、部件通用化、产品系列化”的方向发展及生产组织专业化目标前进。
基于UG与ADAMS的汽车差速器联合仿真方法研究
基于UG与ADAMS的汽车差速器联合仿真方法研究张家启;郑泉;王钰明;鲁磊;黄民峰【期刊名称】《湖北汽车工业学院学报》【年(卷),期】2011(025)001【摘要】基于UG和ADAMS仿真软件对汽车差速器模型进行联合仿真.建立了差速器的优化设计数学模型,通过优化设计软件得到了优化后的齿轮建模参数;根据优化参数在UG中对差速器齿轮进行建模、装配,探讨了在UG/Motion中如何建立仿真模型,并传递到ADAMS中进行仿真分析的方法.将Hertz接触理论嵌入联合仿真模型,在差速器齿轮之间施加接触力,实现了齿轮啮合动态仿真;通过具体实例进行了2种工况下的动力学仿真分析,验证了联合仿真方法的可行性.【总页数】5页(P10-13,18)【作者】张家启;郑泉;王钰明;鲁磊;黄民峰【作者单位】安徽农业大学工学院,安徽合肥230036;安徽农业大学工学院,安徽合肥230036;安徽农业大学工学院,安徽合肥230036;安徽农业大学工学院,安徽合肥230036;合肥美桥汽车传动及底盘系统有限公司,安徽合肥230601【正文语种】中文【中图分类】U463.218.4【相关文献】1.基于ADAMS的汽车前悬架仿真分析及优化方法研究 [J], 周红妮;冯樱;李向阳2.基于UG、ANSYS和ADAMS的联合仿真研究 [J], 田凤霞;司景萍;万方军;陈有余3.基于ADAMS与MATLAB联合的载货汽车平顺性仿真方法研究 [J], 陈志宁;刘夫云;邓聚才4.基于ADAMS/MATLAB联合仿真的LuGre动态轮胎模型研究 [J], 郑文刚;路永婕;陈恩利;李韶华5.基于SolidWorks和Adams的锥齿轮差速器联合仿真 [J], 陶泽南; 樊智涛; 柳林强因版权原因,仅展示原文概要,查看原文内容请购买。
UG运动仿真教程

UG运动仿真教程一、UG运动仿真的基本概念UG软件中的运动仿真功能包括创建几何体、定义运动约束、添加动力学参数等。
通过对运动过程中的力学、动力学以及动力学参数的计算和模拟,可以预测物体的运动轨迹、速度、加速度等运动特性。
二、UG运动仿真的基本步骤1.创建几何模型:在UG软件中,首先需要创建物体的几何模型。
可以通过绘制、拉伸等工具创建物体的几何形状,也可以导入外部模型。
2.设置运动约束:在创建几何模型后,需要为物体设定运动约束。
运动约束包括位置约束、角度约束等,用于定义物体的运动范围和限制。
3.添加动力学参数:在建立几何模型和设置运动约束后,需要为物体添加动力学参数。
动力学参数包括质量、惯性矩阵、摩擦系数等,用于计算物体在运动中的力学特性。
4.运动仿真计算:完成上述步骤后,可以进行运动仿真计算。
UG软件会根据设定的运动约束和动力学参数,计算物体的运动轨迹、速度、加速度等参数,并在三维环境中实时显示物体的运动过程。
5.优化设计:通过观察和分析运动仿真的结果,可以对产品设计进行优化。
根据物体的运动特性,可以调整运动约束、改变动力学参数等,以达到更好的设计效果。
三、UG运动仿真的应用领域1.机械设计与工艺优化:UG运动仿真可以模拟产品在工作状态下的运动过程,帮助工程师分析零件的运动轨迹、工作效率等,优化设计方案和工艺流程。
2.机器人运动规划与控制:UG运动仿真可以模拟机器人的运动行为,预测机器人的轨迹、速度、加速度等,优化机器人的运动规划和控制算法。
3.汽车碰撞分析与安全设计:UG运动仿真可以模拟车辆在碰撞过程中的变形、速度、受力情况等,帮助汽车制造商减少碰撞事故的危害,提高车辆的安全性能。
4.产品装配与拆卸分析:UG运动仿真可以模拟产品的装配和拆卸过程,分析零部件的运动变形情况,优化产品的装配性能和使用寿命。
四、UG运动仿真的优势1.省时省力:UG运动仿真可以通过计算和模拟代替实际运动过程的试错,减少设计和制造阶段的试验和调整时间和成本。
ug运动仿真.pdf
ug运动仿真.pdf4.1 NX运动仿真概述本节将简要对 UG NX 的运动仿真界面和运动仿真工具进行基本的介绍,通过本节的学习,读者可以初步地认识UG NX 的运动仿真功能。
41.1 进入运动仿真模块由于运动仿真需要通过主模块来创建,因此需要先打开主模板,才能进一步进行运动仿真。
下面将介绍进入运动仿真模块的步骤。
打开主模版文件,也可以是包含了装配信息的文件。
(1)单击应用模块中的“运动”按钮。
即可进入运动仿真界面。
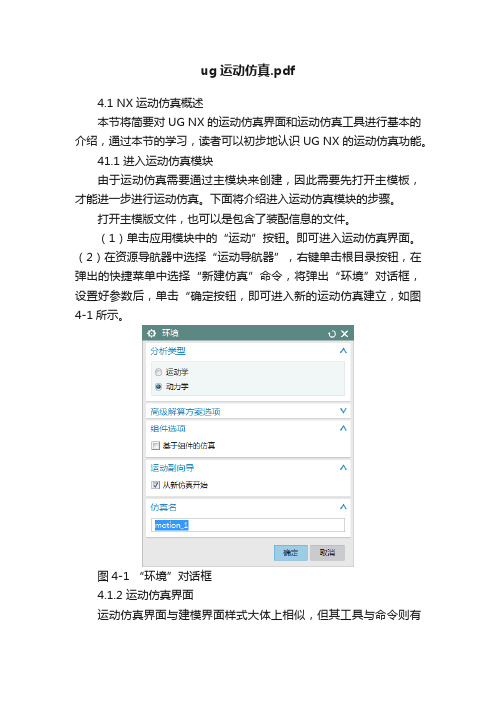
(2)在资源导航器中选择“运动导航器”,右键单击根目录按钮,在弹出的快捷菜单中选择“新建仿真”命令,将弹出“环境”对话框,设置好参数后,单击“确定按钮,即可进入新的运动仿真建立,如图4-1所示。
图4-1 “环境”对话框4.1.2 运动仿真界面运动仿真界面与建模界面样式大体上相似,但其工具与命令则有了较大的变化,如图4-2所示。
图4-2 运动仿真界面菜单栏:包含9个菜单命令,如文件、主页、结果、曲线、分析等。
工具栏:由基本环境工具栏、运动工具栏、动画控制工具栏组成,提供操作所需要的命令的快捷按钮。
运动导航器:通过树形结构显示各个数据,可以进行新建、克隆、删除运动仿真等命令。
4.1.3 运动仿真工具栏运动仿真工具栏包含了进行运动仿真时所需要的大部分命令,如连杆、运动副、齿轮副等,如图4-3所示。
有时运动工具栏也可以根据需要拆分成几个小的工具栏。
图4-3 “运动仿真”工具栏下面将对几种常用命令进行介绍。
连杆:通过连杆命令可以将部件定义为连杆,在运动仿真时部件将作为连杆进行分析模拟,如图4-4所示。
运动副:运动副可以将连杆连接起来,并通过定义不同的运动副的类型使连杆能够进行相应的动作,如图4-5所示。
图4-4 “连杆”对话框图4-5 “运动副”对话框传动副:传动副的作用是改变机构扭矩、转速等。
其中有齿轮副、齿轮齿条副和线缆副3种类型。
约束:通过约束命令可以指定两个对象之间的关系,其中点在曲线上、线在线上和点在曲面上3种类型,如图4-6所示。
ug运动仿真基本步骤
ug运动仿真基本步骤运动仿真是一种模拟运动过程的方法,通过计算机模型来预测和分析运动的行为和性能。
它在众多领域中得到广泛应用,如机械工程、航空航天工程、汽车工程等。
下面将介绍UG软件中运动仿真的基本步骤。
一、构建模型运动仿真的第一步是构建模型。
在UG软件中,可以使用多种方式创建模型,如实体建模、曲面建模等。
在进行运动仿真时,需要将模型的各个部件组装到一起,并确保它们之间的连接正确。
通过拖拽和旋转等操作,可以将部件装配到正确的位置。
在装配过程中,可以使用约束来定义部件之间的运动关系,如旋转关节、滑动关节等。
二、定义驱动器和约束在完成模型的构建后,需要为模型添加驱动器和约束。
驱动器是指作为运动仿真输入的外部力或运动,可以是电机驱动、液压驱动等。
在UG软件中,可以通过定义位移、速度或力矩等参数来模拟驱动器的作用。
约束是指限制模型运动的规则,可以是固定、对称、平行等。
在UG软件中,可以通过选择部件上的面、边或点来添加约束。
约束可以保持部件的相对位置固定,也可以限制部件的运动范围。
通过添加约束,可以模拟实际系统中的各种约束条件,如静摩擦、动摩擦、间隙等。
三、定义边界条件边界条件是指模型的初始状态或边界条件。
在进行运动仿真时,需要定义模型的初始位置、速度和加速度等。
在UG软件中,可以通过设置初始条件来定义模型的初始状态。
边界条件还包括模型与外界的交互,如模型与地面的接触、模型与空气的流动等。
通过定义边界条件,可以模拟系统在不同环境下的运动行为。
四、设置运动仿真参数在进行运动仿真之前,还需要设置一些仿真参数,如仿真时间、时间步长等。
在UG软件中,可以通过设置仿真参数来控制仿真的精度和计算速度。
较小的时间步长可以提高仿真的精度,但会增加计算时间。
较长的仿真时间可以模拟长时间的运动,但需要更多的计算资源。
五、运行仿真完成上述步骤后,可以开始进行运动仿真。
在UG软件中,可以选择“运动模拟”功能,在仿真过程中,UG会根据模型、驱动器、约束和边界条件进行计算,并生成动画和结果数据。
ug运动仿真

ug运动仿真UG(Unigraphics)是一款操作简便、功能强大的三维CAD软件。
它可以让用户在PC机上完成复杂产品的建模、设计、分析和制造。
除此之外,UG还可以进行运动仿真。
运动仿真是指将正在设计的机械装置或产品进行动作模拟,以达到预先预测产品运动情况的目的。
下面将详细介绍UG运动仿真的相关知识。
一、UG运动仿真的基本概念1. 定义装配体:在进行运动仿真之前,必须先定义好装配体。
将设计好的各个部件进行装配,使它们互相连接,并能够形成一个整体。
2. 定义杆件:在进行运动仿真之前,必须先对装配体中需要运动的部件进行杆件定义,如转动支承、铰链、滑动副、齿轮等。
3. 定义驱动:运动仿真中的驱动可以是手动的,也可以是马达等电动机械驱动。
手动驱动需要手工进行操作,而电动驱动则需要使用动力学分析工具进行计算。
4. 定义边界条件:边界条件是指各个杆件、装配体所受的外力、质量、惯量等限制条件。
二、UG运动仿真的基本流程1. 导入装配体和模型杆件:将装配体导入UG中,并进行杆件定义,以及各个杆件之间的约束和驱动的定义。
2. 添加外界载荷:添加装配体所受的外力等载荷,以提高仿真的精度和准确性。
3. 模型分析:进行模型的分析,包括运动分析和动力学分析。
其中,运动分析是根据运动学原理进行的,用来确定装配体各个部件的角度、速度、加速度等运动状态;而动力学分析则是在运动分析的基础上,考虑各个杆件所受载荷所产生的惯性力、反作用力等因素,确定系统的动态行为。
4. 结果显示:将仿真结果在UG界面中以动画的形式进行显示,可以直观地反映出装配体的运动状态和各个部件的相互作用关系。
三、UG运动仿真的应用UG运动仿真在工程设计和制造中起到了很大的作用。
通过运动仿真,设计人员可以直观地看到装配体的各个部件在运动过程中的相互作用关系,从而更好地发现和解决潜在的问题。
同时,UG运动仿真还可以用于预测产品在运动中所受的载荷,以便优化产品的设计。
基于UG的手动变速器的三维建模与运动仿真 开题报告
毕业设计(论文)任务书学院:机械电子工程学院专业:车辆工程学生姓名: 高鑫学号:设计(论文)题目:基于UG的手动变速器三维建模及机构运动仿真起迄日期:2012年2月20日~6月15日设计(论文) 地点: 河北科技大学(新校区)指导教师: 李荣廷(副教授)任务书下达日期: 2012年2月20日1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述:文献综述1.1选题背景现在市场上不同车型所配置的变速器来看,主要分为:手动变速器(MT)、自动变速器(AT)、手动/自动变速器(AMT)、无级变速器(CVT)。
变速器的传动机构又分为三轴传动变速器和两轴传动变速器。
变速器基本功用:(1)改变传动比,满足不同行驶条件对牵引力的需要,使发动机尽量工作在有利的工况下,满足可能的行驶速度要求。
(2)实现倒车行驶,用来满足汽车倒退行驶的需要。
(3)中断动力传递,在发动机起动,怠速运转,汽车换档或需要停车进行动力输出时,中断向驱动轮的动力传递。
根据轿车的外形、轮距、轴距、最小离地间隙、最小转弯半径、车辆重量、装载重量以及最高车速等参数,结合其发动机型号,可以得出发动机的最大功率、最大扭矩、排量等重要的参数。
同时由某些轿车的基本参数,选择适当的主减速比。
根据上述参数,再运用汽车设计、汽车理论、机械设计等相关知识,计算出相关的变速器参数并论证设计的合理性。
理想的变速器应该能使汽车在给定发动机的情况下, 达到理想的动力性能, 并且满足在可靠的工作条件下体积最小、节省材料、降低成本。
这也是未来变速器的改进方向。
在实现变速器的功能和将变速器小型化的同时,实现变速器的节能与环境保护的有机结合,应用新材料,制造出高性能、低成本、微型化、智能化、集成化的新型变速器是当前的主要趋势。
1.2 国内外研究状况1940年美国通用汽车公司首次将液力机械式自动变速器装车应用以来,液力机械式自动变速器的生产形成系列化和专业化。
UG运动仿真分析(精品课件)

连杆
运动副
8
1. 连杆
连杆几何体
连杆几何体用于将屏称。
❖ 对机构作运动分析,
名
不必赋予质量和惯性矩等参数。
称
9
2. 运动副
运动副的作用:允许所需的运动和限制不要的运 动。
UG提供了12种运动副共分两大类:普通运动副 8种,它是独特的,于自身有关;特殊运动副4种, 是在两个普通类型的运动副之间定义了特殊关系的 运动副,允许两个不同类型的运动副一起工作完成 特定的功能。
5
Scenario 导航器 6
3. 机构分析的一般步骤
❖ 打开主模型文件。 ❖ 进入运动分析模块,创建一个Scenario模型
并设置机构分析环境。 ❖ 创建各机构对象(构件、运动副、标记等)。 ❖ 指定分析结果类型,对机构进行求解分析。 ❖ 输出分析结果。
7
创建运动分析对象
在运动分析中,连杆和运动副是组成 构件的最基本要素,两者都具备是机构 运动的必要条件。
❖ 固定副 在连杆间创建一个固定连接副,相当于以刚性连接两连杆,连杆间无相 对运动。
13
特殊运动副:
❖ 齿轮齿条副:滑动副和旋转副的结合 ❖ 齿轮副:两个转动副的结合 ❖ 线缆副:两个滑动副的结合 ❖ 点线接触副:4个自由度 ❖ 线线接触副: 4个自由度 ❖ 点面副:5个自由度
14
模型准备与运动分析
18
3. 封装 用来收集特定的、用户感 兴趣的对象信息的一组工具。 有三个功能: ➢ 测量 ➢ 跟踪 ➢ 干涉
19
❖ 测量
测量机构中目标对象的距离或角度,并建立安全区 域。
❖ 跟踪
用来生成每一分析步骤处目标对象的一个复制对象。
❖ 干涉
主要比较在机构运动过程中是否发生重叠现象。
UG运动仿真教程
UG运动仿真教程UG运动仿真是一种使用UG软件来模拟和分析产品的运动性能的方法。
它可以帮助工程师预测产品在不同工况下的运动轨迹、加速度和力学应力等信息,从而提高产品设计的准确性和效率。
本文将介绍UG运动仿真的基本原理和操作步骤,并通过一个实际案例进行演示。
UG运动仿真的基本原理是基于动力学分析和运动学原理。
动力学分析是根据牛顿力学原理,通过对物体的质量、加速度和受力进行计算,得出物体的运动状态。
而运动学原理则是研究物体在空间中的位置、速度和加速度之间的关系。
将这两个原理结合起来,就可以实现UG运动仿真。
在进行UG运动仿真之前,首先需要对产品进行建模。
UG提供了丰富的建模工具和功能,可以轻松地创建各种产品的三维模型。
建模完成后,就可以开始进行运动仿真了。
首先,打开UG软件并导入已经完成的产品模型。
然后,在菜单栏中选择"运动分析"选项,进入运动仿真界面。
在运动仿真界面中,可以看到产品模型和仿真工具栏。
接下来,需要定义产品的运动类型。
UG提供了多种运动类型的选择,如旋转、滑动、盘杆等。
根据实际情况选择相应的运动类型,并指定相应的约束条件和参数。
然后,需要添加约束和加载。
约束是指限制物体运动的条件,如固定、旋转、滑动等。
加载是指施加在物体上的力或力矩。
根据实际情况添加相应的约束和加载。
接下来是关键的步骤,即设置仿真参数和运行仿真。
在设置仿真参数时,需要指定仿真的时间范围、步长和求解器等。
时间范围是指仿真运行的时间长度,步长是指每个时间步的长度。
求解器是根据已知的约束条件和加载,计算物体的运动状态的算法。
根据实际情况设置仿真参数。
最后,点击运行仿真按钮,UG就会自动进行运动仿真。
在仿真过程中,UG会计算物体的运动轨迹、加速度和力学应力等信息,并将结果以图形或表格的形式展示出来。
通过UG运动仿真,工程师可以快速准确地预测产品在不同工况下的运动性能。
这对于产品设计的优化和改进非常有帮助。
例如,在汽车设计中,可以通过运动仿真来分析车身在不同驾驶条件下的动力学响应,从而优化悬挂系统和车身刚度,提高车辆的安全性和舒适性。
UG运动仿真教程

UG运动仿真教程UG是一款专业的CAD软件,可以进行机械设计、工业设计、生产制造等工作。
UG的强大功能之一就是其运动仿真功能,可以模拟产品在运动过程中的各种情况,例如运动轨迹、速度、加速度、负荷等。
本教程将介绍如何使用UG进行运动仿真。
一、建立零件和装配体在进行运动仿真之前,必须先建立相应的零件和装配体。
可以按照实际产品设计,也可以创建一些简单的零件和装配体来进行学习。
建立零件和装配体的方法在此不再赘述。
二、定义关节和运动学限制在进行运动仿真之前,必须定义零件之间的关节和运动学限制,以确保装配体能够正常运动。
关节有许多种类型,例如旋转关节、滑动关节、万向关节等。
可以通过“插入”-“关节”菜单来定义关节类型和位置。
在定义关节之后,需要设置运动学限制,以确保零件的运动范围符合实际情况。
例如,可以为旋转关节设置最大旋转角度,为滑动关节设置最大滑动距离等。
运动学限制可以在“关节”-“限制”菜单中进行设置。
三、创建运动仿真分析类型在定义关节和运动学限制之后,需要创建一个运动仿真分析类型,以便进行运动仿真分析。
可以在“运动仿真”-“新建运动仿真”菜单中创建仿真分析类型。
在创建仿真分析类型时,需要设置仿真类型、仿真步长、仿真时间等参数。
其中,仿真类型可以选择“刚性”或“弹性”;仿真步长决定了仿真分析的计算精度,数值越小计算精度越高,但计算时间也会更长;仿真时间设置了仿真分析的总时间。
四、定义初始位置和速度在定义运动仿真分析类型之后,需要设置零件的初始位置和速度。
可以通过“插入”-“实体状况”菜单来进行设置。
在设置初始位置时,可以通过移动零件来调整其位置。
在设置初始速度时,可以为零件设置初始速度矢量。
五、运行运动仿真分析在设置好运动仿真分析类型、关节和运动学限制、初始位置和速度之后,可以开始进行运动仿真分析。
可以在“运动仿真”-“分析”菜单中启动仿真分析。
在仿真分析的过程中,可以观看零件的运动轨迹、速度、加速度等情况。
UG运动仿真分析

UG运动仿真分析UG运动仿真分析根据课程设计中需求仿真的UG运动系统,通过对系统运动仿真进行分析,可以获得系统的运动特性,进而优化系统设计和性能。
本文将从UG运动的基本原理、运动仿真的步骤、仿真结果的分析以及优化改进方向等方面进行论述。
UG运动的基本原理是基于机器人工作空间以及运动学基本原理进行运动规划与执行。
在UG软件中,通过建立动作路径、定义关节角度、进行示教等方式,可以实现运动轨迹的规划和控制。
UG运动仿真的目的是模拟实际设备在特定运动条件下的反应,并优化运动学性能。
运动仿真的基本步骤分为模型准备、运动规划、运动控制和结果分析四个阶段。
首先是模型准备阶段。
在这个阶段,需要通过UG软件建立机器人动作模型,并定义机器人的界限和工作空间范围。
此外,还需要将机器人的动作路径进行建模,并定义每个动作路径中的关节角度等参数。
第二步是运动规划阶段。
在这个阶段,需要通过UG软件进行路径规划和运动轨迹的优化。
通过对动作路径进行调整和优化,可以达到最佳的运动效果和工作速度。
此外,还可以通过设置约束条件,对机器人的运动进行限制,确保机器人在特定条件下的安全运行。
第三步是运动控制阶段。
在这个阶段,需要定义机器人的运动控制器,并将其编程到UG软件中。
通过控制器的设计和编程,可以实现机器人的运动控制和轨迹跟踪,确保机器人按照预定的路径进行运动。
最后一步是结果分析阶段。
在这个阶段,需要对仿真结果进行分析和评估。
通过对运动轨迹、关节角度和运动速度等参数进行分析,可以评估系统的运动特性和性能。
通过对结果的分析,可以发现系统中存在的问题和不足,并提出优化改进的方案。
在UG运动仿真分析中,可以对系统的运动特性进行分析和评估。
通过对运动轨迹、速度和加速度等参数的分析,可以确定系统的运动轨迹和速度是否满足要求。
通过对关节角度和工作空间的分析,可以评估系统的工作范围和移动能力。
通过对系统的性能进行分析,可以确定系统的优化改进方向,以提高系统的运动特性和性能。
UG__运动仿真教程

UG__运动仿真教程运动仿真是通过计算机模拟运动过程的技术,可以用于模拟各种类型的运动,如机器人运动、人体运动、车辆运动等。
本篇教程将介绍如何使用UG软件进行运动仿真。
本教程将分为以下几个部分:1.系统要求2.安装UG软件3.导入模型4.设置材质5.确定运动范围6.创建关节7.设定动画关键帧8.运动仿真设置9.运行仿真10.保存模拟结果一、系统要求运行UG软件需要较高的计算机配置,建议使用具备较高CPU和内存的电脑。
安装UG软件也需要一定的存储空间。
此外,也需要了解基础的三维建模知识。
二、安装UG软件UG软件是一款商业软件,需要购买正版授权后使用。
购买后,按照安装向导进行安装即可。
三、导入模型打开UG软件,选择导入功能,选择要进行运动仿真的模型文件,导入模型。
可以选择常见的三维模型格式,如STL、STEP等。
四、设置材质为了使模型在运动仿真中更加直观,可以对模型的材质进行设置。
UG 软件提供了丰富的材质选项,可以根据需要进行设置。
选定模型后,点击设定材质按钮,在属性栏中进行材质设置。
五、确定运动范围在进行运动仿真前,需要确定模型的运动范围。
可以通过拖拽模型或者输入数值的方式进行设定。
在导航栏中找到模型变换选项,进行平移、旋转、缩放等操作。
六、创建关节运动仿真的核心是设置关节。
UG软件提供了丰富的关节类型,如旋转关节、滑动关节、平面关节等。
根据模型的实际情况选择合适的关节类型,并创建关节。
选择关节工具,在模型上点击两个相邻的部件以创建关节。
七、设定动画关键帧在建立了关节后,需要设定动画关键帧。
动画关键帧是指模型在不同时间点的状态。
选择动画关键帧工具,在时间轴上设定关键帧,对模型进行调整。
八、运动仿真设置在设定了动画关键帧后,需要进行运动仿真的设置。
选择动画工具,在动画设置中设定仿真的时间范围、速度、步长等参数。
选择适当的参数可以提高仿真的效果。
九、运行仿真完成了运动仿真的设置后,即可进行运行仿真。
UGNX8.5运动仿真的基本介绍

第2章UG NX8.5运动仿真的基本介绍本章主要介绍UGNX8.5模块中运动仿真的功能。
运动仿真是UGNX8.5模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG 的建模功能建立一个三维实体模型,利用UG的运动仿真功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG的运动仿真功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析UG NX8.5运动仿真的界面。
UG NX8.5运动模型管理。
UG NX8.5运动分析。
成运动过程的跟踪记录运动副的创建2.1 UGNX8.5运动仿真主界面在进行运动仿真之前,先要打开UG NX8.5运动仿真的主界面。
在UG 的主界面中选择菜单命令【启动】|【运动仿真】,随后弹出提示框,点击是按钮,如图2-1所示。
图2-1 执行运动仿真命令选择该菜单命令后,系统将会自动打开运动仿真的主界面,同时弹出运动仿真的工具栏。
2.1.1 运动仿真工作界面介绍点击运动仿真后UG 界面将作一定的变化,系统将会自动的打开UG 运动仿真的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图2-2所示。
图2-2 运动仿真主界面运动仿真工具栏运动仿真绘图区 运动仿真导航器运动仿真工具栏部分主要是运动仿真各项功能的快捷按钮,运动场景导航窗口部分主要是显示当前操作下处于工作状态的各个运动场景的信息。
UG运动仿真的建立过程

UG运动仿真的建立过程
运动仿真的建立过程
1.打开装配体,转换至运动仿真界面
2.右击装配选项,选择新建仿真命令
3.选择连杆(将相互无运动的零件视为一个连杆,设置中
选对于相对机架固定的构件为固定连杆),依次勾选装配体中所有构件,最终点击确定。
4.选择运动副选项,依次选取所有运动构件,进行定义。
(对于转动副,若其中一构件相对于机架固定,则此转
动副无需设置啮合连杆选项,反之,则需设置。
对于相对移动的构件,则仅需设置每一个构件的移动
方位即可。
对于原动件还需设置运动速度)
5.选择标记,选择追踪对象进行标记。
6.选择motion,右击选择新建追踪,选markers子选项
全部进行追踪。
7.建立解算方案,设置参数,确定解算方案,而后选择
求解此方案。
8.选择运动-〉动画选项,进行动画演示。
注:对于无需获取某部分运动轨迹的仿真,可以考虑5.6步骤。
UG运动仿真教程
UG运动仿真教程1.打开UG软件,选择“模拟”菜单下的“运动仿真”选项。
2.在“新模拟”对话框中,选择要仿真的物体和运动轨迹。
可以通过选择已经建模的零部件或创建新的零部件来定义要仿真的物体。
运动轨迹可以通过参数化建模或输入运动方程来定义。
4.选择仿真的参数和计算方法。
可以选择仿真的时间范围、时间步长、初始条件等。
计算方法可以是动态分析、静态分析或优化计算,根据需要选择。
5.单击“仿真”按钮,开始运行仿真。
可以观察物体的运动轨迹、速度、加速度等参数的变化情况。
同时还可以生成报告,分析仿真结果。
6.根据仿真结果进行设计优化。
根据仿真结果,可以对产品的材料、结构等进行优化,以满足设计要求。
1.运动分析:通过仿真分析物体在运动过程中的行为,包括位置、速度、加速度等参数的变化。
可以观察和分析物体的运动规律,为设计提供参考。
2.碰撞检测:可以检测物体在运动过程中是否会产生碰撞,帮助设计工程师避免设计上的问题。
可以通过设置碰撞检测参数和约束条件来进行检测。
3.摩擦分析:可以分析物体在运动过程中的摩擦情况,包括静摩擦和动摩擦。
通过调整摩擦系数和约束条件,可以模拟不同的摩擦情况。
4.优化计算:通过设置不同的设计参数和优化目标,可以对产品进行优化计算,以满足设计要求。
可以根据优化结果进行设计调整,提高产品性能。
5.可视化显示:可以通过3D可视化界面显示仿真结果,包括物体的运动轨迹、速度、加速度等参数。
可以通过调整显示参数和视角,观察物体在不同情况下的运动状态。
UG运动仿真是UG软件中常用的功能之一,可以帮助设计工程师进行产品设计和优化。
通过运动仿真,可以分析物体的运动规律、检测碰撞、分析摩擦等问题,并进行优化计算。
希望本文对您了解UG运动仿真的基本使用方法和常用功能有所帮助。
UG运动仿真基本流程
运动仿真基本流程计算机仿真的过程,实际上就是凭借系统的数学模型,并通过该模型在计算机上的运行,来执行对该模型的模拟、检验和修正,并使该模型不断趋于完善的过程。
1.在试图求解问题之前,实际系统的定义最为关键,尤其是系统的包络边界的识别。
对一个系统的定义主要包括系统的目标、目标达成的衡量标准、自由变量、约束条件、研究范围、研究环境等等,这些内容必须具有明确的定义准则并已于定量化处理。
2.一旦有了这些明确的系统定义,结合一定的假设和简化,在确定了系统变量和参数以及他们之间的关系后,即可方便的建立描述所研究系统的数学模型。
3.接下来做的工作是实现数学模型向计算机执行的转变,计算机执行主要是通过程序设计语言变成的程序来完成的,为此,研究人员必须在高级语言和专用仿真语言之间做出选择。
4.计算机仿真的目的,主要是为了研究或再现实际系统的特征,因此模型的仿真运行是一个反复的动态过程;并且有必要对仿真结果做出全面的分析和论证。
否则,不管仿真模型建立的多么精确,不管仿真运行次数多么大,都不能达到正确的辅助分析者进行系统抉择的最终目的.用户通过计算机进行运动仿真的过称为:1.进入运动仿真模块2.建立连杆创建连杆的第一步是从连杆和运动付工具条中单击连杆图标,弹出连杆对话框。
对话框中显示默认的名字,输入名字后按回车键即可。
连杆对话框的第二项是自定义质量特性,它是一个可选项,在不涉及反作用力时可以将它关闭而使用自定义的质量特性.但尽管如此,有时还是要定义质量特性,此时其他窗口将被激活。
包括质量、质心、惯性矩、初始速度等。
接着要定义材料,材料是计算质量和惯性矩的关键因素。
3创建运动付定义运动付以前机构中的连杆是在空中浮动的,没有约束的.创建运动付的操作分为三步:(1)选择运动付要约束的连杆(2)确定运动付的原点(3)确定运动付的方向单击运动工具条中的运动付图标,或从菜单中选择插入—运动付,弹出运动付对话框。
4定义运动驱动运动驱动是赋在运动付上控制运动的运动服参数。