水下机器人-自主航行器AUV-LAUV介绍
无缆自治水下机器人
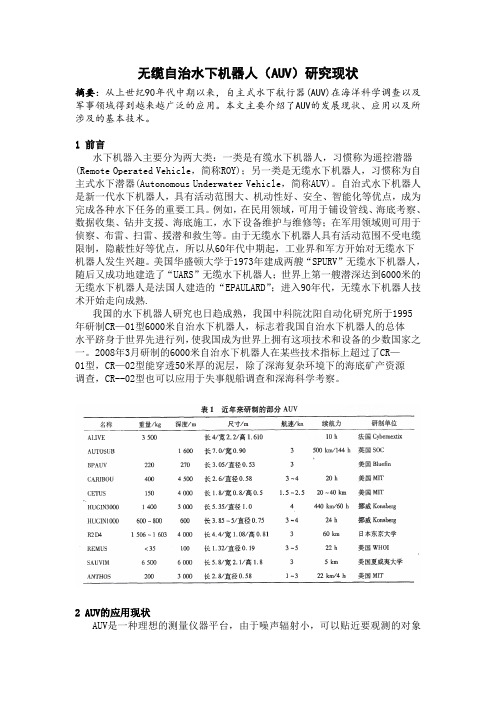
无缆自治水下机器人(AUV)研究现状摘要:从上世纪90年代中期以来,自主式水下航行器(AUV)在海洋科学调查以及军事领域得到越来越广泛的应用。
本文主要介绍了AUV的发展现状、应用以及所涉及的基本技术。
1 前言水下机器入主要分为两大类:一类是有缆水下机器人,习惯称为遥控潜器(Remote Operated Vehicle,简称ROY);另一类是无缆水下机器人,习惯称为自主式水下潜器(Autonomous Underwater Vehicle,简称AUV)。
自治式水下机器人是新一代水下机器人,具有活动范围大、机动性好、安全、智能化等优点,成为完成各种水下任务的重要工具。
例如,在民用领域,可用于铺设管线、海底考察、数据收集、钻井支援、海底施工,水下设备维护与维修等;在军用领域则可用于侦察、布雷、扫雷、援潜和救生等。
由于无缆水下机器人具有活动范围不受电缆限制,隐蔽性好等优点,所以从60年代中期起,工业界和军方开始对无缆水下机器人发生兴趣。
美国华盛顿大学于1973年建成两艘“SPURV”无缆水下机器人,随后又成功地建造了“UARS”无缆水下机器人;世界上第一艘潜深达到6000米的无缆水下机器人是法国人建造的“EPAULARD”;进入90年代,无缆水下机器人技术开始走向成熟.我国的水下机器人研究也日趋成熟,我国中科院沈阳自动化研究所于1995 年研制CR—01型6000米自治水下机器人,标志着我国自治水下机器人的总体水平跻身于世界先进行列,使我国成为世界上拥有这项技术和设备的少数国家之一。
2008年3月研制的6000米自治水下机器人在某些技术指标上超过了CR—01型,CR—02型能穿透50米厚的泥层,除了深海复杂环境下的海底矿产资源调查,CR--02型也可以应用于失事舰船调查和深海科学考察。
2 AUV的应用现状AUV是一种理想的测量仪器平台,由于噪声辐射小,可以贴近要观测的对象(如以设定高度进行海底地形跟踪),因而可以获取采用常规手段不能获取的高质量数据和图像。
自主遥控水下机器人研究现状
自主遥控水下机器人研究现状一、本文概述随着科技的飞速发展,自主遥控水下机器人(AUV,Autonomous Underwater Vehicle)已成为海洋科学研究、海底资源勘探、水下救援等领域的重要工具。
本文旨在探讨自主遥控水下机器人的研究现状,分析其发展动态,并展望未来的发展趋势。
文章将首先介绍自主遥控水下机器人的基本概念和工作原理,然后概述国内外在AUV技术研究方面所取得的主要成就和挑战。
通过对AUV的研究现状进行全面分析,旨在为相关领域的研究人员和工程技术人员提供参考,推动自主遥控水下机器人技术的进一步发展。
二、自主遥控水下机器人技术概述自主遥控水下机器人(AUVR,Autonomous Underwater Vehicle with Remote Control)是近年来海洋科技领域的热门研究方向,其融合了自主导航、环境感知、远程控制以及作业执行等多项关键技术。
AUVR不仅能够在无人干预的情况下,根据预设任务或环境信息进行自主决策和行动,而且还可以通过远程操控,实现对机器人的精确控制,以应对复杂多变的海洋环境。
在自主导航方面,AUVR通常采用基于声纳、激光雷达、视觉等多种传感器的融合技术,以实现水下三维空间的精确定位与导航。
随着人工智能技术的发展,一些AUVR已经开始应用深度学习、强化学习等算法,提高其在水下环境的自主导航能力。
环境感知是AUVR实现自主作业和远程控制的关键技术之一。
通过搭载多种传感器,AUVR可以实现对水下温度、盐度、流速、水质等环境参数的实时监测,以及水下地形、地貌、生物等信息的获取。
这些环境感知数据不仅为AUVR的自主决策提供依据,也为远程操控者提供了直观的水下环境信息。
远程控制技术的发展为AUVR在复杂环境下的作业提供了有力支持。
通过无线通信技术,操控者可以实现对AUVR的实时监控和控制,包括机器人的运动轨迹、作业状态、环境感知数据等。
同时,随着5G、物联网等新一代通信技术的发展,AUVR的远程控制能力将得到进一步提升,有望实现更高带宽、更低延迟的远程控制。
海洋机器人在海洋环境评估中的智能化应用
海洋机器人在海洋环境评估中的智能化应用在人类探索海洋的进程中,海洋环境评估一直是至关重要的课题。
随着科技的迅猛发展,海洋机器人逐渐成为海洋环境评估的得力助手,以其智能化的应用为我们深入了解海洋环境提供了前所未有的可能。
海洋环境评估是一项复杂而艰巨的任务,涉及对海洋物理、化学、生物等多方面因素的监测和分析。
传统的评估方法往往受到人力、物力和技术手段的限制,难以实现全面、实时和高精度的监测。
而海洋机器人的出现,为解决这些问题带来了新的思路和方法。
海洋机器人具有多种类型,如自主水下航行器(AUV)、遥控水下航行器(ROV)以及水下滑翔机等。
这些机器人具备不同的特点和功能,能够适应各种复杂的海洋环境和任务需求。
自主水下航行器(AUV)是一种能够自主规划路径、执行任务的机器人。
它可以携带各种传感器,如温度传感器、盐度传感器、溶解氧传感器等,对海洋的物理参数进行长时间、大范围的监测。
例如,在监测海洋温度分布时,AUV 可以按照预设的航线,在不同深度和区域进行测量,获取大量的温度数据。
通过对这些数据的分析,我们能够了解海洋的热结构、海流运动等情况,从而为海洋环流模型的建立和气候变化研究提供重要依据。
遥控水下航行器(ROV)则通常由操作人员通过线缆进行远程控制。
ROV 配备了高清摄像机和机械手臂等设备,能够对海洋中的生物群落、海底地貌等进行直观的观察和采样。
在海洋生态环境评估中,ROV 可以帮助科学家近距离观察珊瑚礁的健康状况、鱼类的活动规律等。
同时,通过采集海底沉积物和水样,还可以分析其中的污染物含量和微生物群落结构,为评估海洋污染程度和生态系统的稳定性提供关键信息。
水下滑翔机是一种依靠自身浮力驱动的新型海洋机器人。
它的能耗低、续航能力强,能够在海洋中长时间工作。
水下滑翔机可以测量海洋的温盐深等基本参数,并且能够通过卫星通信将数据实时传输回陆地。
在海洋环境监测网络的构建中,水下滑翔机发挥着重要作用。
多个水下滑翔机协同工作,可以实现对大面积海域的持续监测,及时发现海洋环境的异常变化。
海洋机器人在灾害救援中的应用
海洋机器人在灾害救援中的应用在当今科技飞速发展的时代,海洋机器人正逐渐成为灾害救援领域的一支重要力量。
海洋占据了地球表面的大部分区域,当海洋灾害发生时,其带来的破坏和影响往往是巨大的。
而海洋机器人凭借其独特的优势,为灾害救援工作提供了新的思路和方法。
海洋灾害的种类繁多,如海啸、飓风、风暴潮、海冰等,这些灾害不仅会对沿海地区的基础设施和人民生命财产造成严重威胁,还可能引发一系列次生灾害。
在灾害发生后,及时获取准确的信息对于救援工作的开展至关重要。
传统的救援方式在面对广阔的海洋和复杂的环境时,往往存在诸多限制。
例如,救援人员难以迅速抵达受灾区域,恶劣的海况也会给救援行动带来巨大的风险。
而海洋机器人的出现,则为解决这些问题提供了可能。
海洋机器人具有多种类型,包括自主水下航行器(AUV)、遥控水下机器人(ROV)和水面无人艇(USV)等。
AUV 可以在无需人工干预的情况下,按照预设的路线进行自主探测和数据采集。
ROV 则通过线缆与母船相连,由操作人员在船上进行远程控制,能够完成更为复杂和精细的任务。
USV 则在水面上行动,可用于巡逻、监测和物资运输等工作。
在灾害救援中,海洋机器人可以发挥多种重要作用。
首先,它们能够快速到达受灾区域,进行环境监测和信息收集。
例如,在海啸发生后,海洋机器人可以迅速部署到灾区附近的海域,测量海浪高度、水流速度、水温等关键数据,为救援决策提供依据。
其次,海洋机器人可以用于搜寻失踪人员和遇难者。
它们配备有先进的传感器和摄像设备,能够在浑浊的海水中进行探测,提高搜寻的效率和准确性。
此外,海洋机器人还能够协助救援物资的运输和投放。
在一些交通受阻的受灾地区,海洋机器人可以携带急需的药品、食品和救援设备,突破海浪和障碍,将物资送达指定地点。
以一次飓风灾害为例,强风暴雨导致沿海地区遭受重创,道路中断,通信设施受损。
救援人员无法及时了解受灾区域的详细情况。
此时,派出了多台海洋机器人前往灾区。
小型模块化水下自主航行器技术概况
小型模块化水下自主航行器技术概况发布时间:2022-08-02T08:05:59.367Z 来源:《科学与技术》2022年3月6期作者:曹晓霖[导读] 水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、曹晓霖中国船舶集团有限公司第七一〇研究所湖北宜昌 443003摘要:水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、小型化可以有效较小AUV的操纵性和便携性。
针对AUV小型化和模块化设计问题进行了全面的剖析,首先对小型模块化AUV的国内外发展现状进行了分析,然后对小型模块化AUV 国内外的差距和关键技术进行了总结,最后对小型模块化AUV的应用前景进行了探讨。
关键词:模块化AUV;研究现状;关键技术;应用前景Technology Survey of Small Modular Autonomous Underwater VehicleCAO Xiaolin(No. 710 R&D Institute, CSSC, Yichang 443003, China)Abstract:Autonomous underwater vehicle (AUV) is developing towards miniaturization and modularization. The highly integration and miniaturization of AUV system can effectively reduce the maneuverability and portability of AUV. AUV miniaturization and modularization design problems are comprehensively analyzed. First of all, the development status of small modular AUV at home and abroad are analyzed. Then, the gap and key technologies of small modular AUV at home and abroad are summarized. Finally, application prospects of small modular AUV are discussed. Key words:modular AUV; development status; key technologies; application prospects引言:为满足深海海洋科学调查的需要,我国陆续开展了水下自主航行器技术的研究。
自主水下航行器导航与定位技术

自主水下航行器导航与定位技术发布时间:2023-02-03T02:36:04.888Z 来源:《科学与技术》2022年第18期作者:杜晓海[导读] 自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,杜晓海海军装备部 710065摘要:自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,在执行任务时需要准确的定位信息。
现有AUV主要采用基于捷联惯性导航系统(SINS),辅以声学导航和地球物理场匹配导航技术。
本文简要介绍了水下导航模式的基本原理、优缺点和适用场景;讨论了各种导航模式中的关键技术,以提高组合导航的精度和稳定性。
通过分析现阶段存在的问题,展望了水下航行的未来发展趋势。
关键词:自主水下航行器;智能导航;智能定位本文综述了目前主流的AUV水下导航关键技术,包括DVL测速技术、LBL/SBL/USBL水声定位导航技术、地形辅助导航技术、地磁辅助导航技术和重力辅助导航技术以及协同导航技术,介绍了相关导航技术的基本原理和发展,分析和总结了水下自主导航中各技术的关键问题和技术难点,最后展望了AUV水下导航技术的未来发展。
1 SINS/DVL定位技术DVL是一种利用声波多普勒效应测量载流子速度的导航仪器。
根据AUV与水底之间的相对距离,DVL有两种模式:水底跟踪和水底跟踪。
当载流子与水底的相对距离在该范围内时,声波可以到达水底,当AUV与水底之间的相对距离超过范围时,声波无法到达水底,DVL采用水跟踪模式。
根据传输波速的多少,可以分为单波束、双波束和四波束。
1.1 SINS/DVL对准技术惯性导航可以为AUV提供实时的姿态、速度、位置等导航信息。
然而,初始对准必须在使用前进行,初始对准的结果在很大程度上决定了最终的集成精度。
通常,AUV在停泊或航行于水面时接收GPS信号进行初始对准。
在特定的任务背景下,AUV需要在水下运动期间完成初始对准,因此,许多学者提出了基于DVL辅助的移动基站对准。
水下机器人在海洋资源勘探中的新技术应用
水下机器人在海洋资源勘探中的新技术应用海洋,覆盖了地球表面的约 70%,蕴含着丰富的资源,如石油、天然气、矿产、生物资源等。
然而,海洋环境复杂、恶劣,对人类的直接勘探和开发带来了巨大的挑战。
水下机器人的出现和不断发展,为海洋资源勘探带来了新的希望和可能。
它们凭借先进的技术,能够深入海洋深处,获取宝贵的数据和信息,为资源的开发和利用提供了重要的支持。
水下机器人,也被称为无人遥控潜水器(ROV)或自主式水下航行器(AUV),是一种能够在水下自主或遥控操作的智能化设备。
在海洋资源勘探中,水下机器人发挥着越来越重要的作用,其新技术的应用也在不断拓展和深化。
在传感器技术方面,水下机器人配备了一系列高精度、高灵敏度的传感器。
例如,多波束测深仪能够快速、准确地测量海底地形,绘制出详细的海底地貌图;侧扫声纳可以探测海底的地质结构和物体分布;磁力仪则用于测量海底磁场,帮助寻找磁性矿产资源。
这些传感器的性能不断提升,数据精度和分辨率越来越高,为海洋资源勘探提供了更加准确和丰富的信息。
视觉技术的应用也是水下机器人的一大亮点。
高清摄像机和先进的图像处理技术,使得水下机器人能够拍摄清晰的海底图像和视频。
通过计算机视觉算法,对这些图像和视频进行分析和处理,可以识别出海底的矿产露头、生物群落、沉船等目标。
同时,水下机器人还可以利用激光扫描技术,构建三维海底模型,更加直观地展示海底的形态和特征。
在动力与推进技术方面,新型的能源系统和高效的推进器使得水下机器人的续航能力和作业范围大大增加。
例如,采用锂电池或燃料电池作为能源,能够提供更长时间的动力支持;而无刷直流电机和喷水推进器等先进的推进技术,则提高了水下机器人的运动性能和操控性。
此外,一些水下机器人还具备自主充电和能源管理功能,能够在作业过程中根据能源状况自动调整工作模式,提高能源利用效率。
通信技术的进步也为水下机器人的应用带来了便利。
传统的水下通信方式存在着数据传输速率低、距离有限等问题。
浅谈深海水下自主式无缆潜航器的发展及应用

图1 Bluefin-21图2 Autosub 6000图3 EXPLORE图4 REMUS 6000 图5 A6K图6 Sea Raptor65 /水转向深水。
深海水下矿产资源如多金属结核、富钴结壳、多金属硫化物、富稀土沉积物等多分布在数千米水深的海底区域,天然气水合物也多分布在几百至几千米的区域。
深海水下资源的勘探对社会的发展具有重要的意义,而深海AUV必将在水下资源勘探过程中发挥重要作用。
2.2 深海水下搜救深海水下搜救是深海AUV的一个重要应用方向,早在 1963 年就有美国“阿尔文”号与“科夫”号无人潜水器协作搜寻、打捞出西班牙海沟失落氢弹的成功案例。
在马航MH370及法航447的水下搜寻中深海AUV发挥关键作用。
荷兰辉固公司曾使用英国Kongsberg公司的HUGIN AUV用于马航MH370水下搜寻;美国军方也曾使用BluefinRobotics的Bluefin-21 AUV搜寻马航失联客机;英国Kongsberg公司生产的REMUS AUV曾成功搜寻到法航447的发动机残骸。
深水AUV因其作业可靠,智能程度高成为了深海水下搜救的首选工具。
2.3 水下地形测绘目前水下地形的测绘主要依靠多波束测深系统,在应对水深较浅的水下地形勘测任务中,船载多波束测深系统均可获得分辨率较高的水下地形图。
但在深水区域,受到水深影响,即使是开角较小的深水多波束在深水情况下会由于传播距离的增加导致其分辨率相对较差,无法获得高精度的水下地形图。
深海AUV可在距离海底较近的高度进行作业,因此其可获得高精度的深海水下地形图像。
3.深海AUV的未来的发展方向3.1 远程化深海AUV在水下作业过程中其主要动力来源是所搭载的电池模块,依据其搭载的探测装置及工作状态不同,其在水下的工作时间也存在较大差别。
多数深海AUV的水下续航时间均可达到24h,但随着电池技术的不断发展,深海AUV的续航力将得到持续提升。
续航力的提升,可使AUV在单次布放后获得更为庞大的水下数据从而提升深海AUV的水下作业效率。
我国深海自主水下机器人的研究现状

我国深海自主水下机器人的研究现状一、本文概述随着科技的飞速发展,深海探索已成为人类认识地球、拓展生存空间、开发资源的重要领域。
深海自主水下机器人(AUV)作为深海探索的核心装备,其技术水平直接决定了我国在深海资源开发、深海科学研究、海洋环境监测等领域的竞争力。
本文旨在全面梳理我国深海自主水下机器人的研究现状,分析存在的问题和挑战,并展望未来的发展趋势,以期为推动我国深海自主水下机器人技术的进一步发展提供参考和借鉴。
本文将首先回顾深海自主水下机器人的发展历程,阐述其在我国海洋战略中的重要地位。
接着,将从设计制造、导航定位、智能感知与控制等方面,详细介绍我国深海自主水下机器人的技术现状,以及在国际上的地位和影响力。
在此基础上,本文将深入探讨我国在深海自主水下机器人技术研究中面临的主要问题和挑战,包括核心技术瓶颈、关键部件依赖进口、研发周期长、经费投入不足等。
本文将对未来深海自主水下机器人技术的发展趋势进行展望,提出针对性的建议,以期为我国深海自主水下机器人技术的持续创新和发展提供有益的参考。
二、深海自主水下机器人技术概述深海自主水下机器人(AUV,Autonomous Underwater Vehicle)是海洋工程技术与机器人技术相结合的产物,具有高度的自主性,能够在无人操控的情况下,独立完成复杂的海洋环境探测、海底地形测绘、海洋资源勘探等任务。
我国深海自主水下机器人的研究,经过多年的积累和发展,已经取得了一系列显著的成果。
在硬件设计方面,我国的深海AUV已经具备了较高的耐压性、稳定性和续航能力。
许多型号的AUV采用了先进的复合材料和轻量化设计,有效减轻了机体的重量,提高了其在深海环境中的机动性和灵活性。
同时,AUV的推进系统也经过了优化设计,能够在各种复杂的海洋环境中稳定运行,保证了探测任务的顺利完成。
在软件与控制系统方面,我国的深海AUV已经实现了较高的智能化水平。
通过搭载先进的导航、定位和控制系统,AUV能够自主完成路径规划、避障、目标跟踪等任务。
无人水下自主航行器(AUV)避碰研究
V
内蒙古大学硕士论文
独创性声明
本人声明:所呈交的学位论文是本人在导师的指导下进行的研究工作及取得的研究成果。 除本文已经注明引用的内容外,论文中不包含其他人已经发表或撰写过的研究成果,也不包 含为获得内蒙古大学及其他教育机构的学位或证书而使用过的材料。与我一同工作的同志对 本研究所做的任何贡献均已在论文中作了明确地说明并表示了谢意。
different sea flow.The simulation results show that obstacle avoidance results are
different for different depth input forms;the depth input is chosen suitably for abnormity obstacles,and the obstacle avoidance result is satisfying.
integrated by path planning and real time control for obstacle avoidance in the
condition of uncertain environment.
KEYWORDS:autonomous underwater vehicle,path planning, real time control of
浅谈深海水下自主式无缆潜航器的发展及应用

浅谈深海水下自主式无缆潜航器的发展及应用作者:刘晓宇来源:《珠江水运》2019年第14期摘要:文章讨论了国内外深海水下自主式无缆潜航器(AUV)的国内外发展现状,并对主流产品及我国研制的主要成果的性能参数、主体尺寸、主要功能及使用场景等进行了介绍。
并着重对深海AUV在目标搜寻、地质勘探及深海探测等方面的应用着重进行了分析。
结合目前深海AUV的发展现状提出了其远程化、智能化及模块化的发展方向。
关键词:深海AUV 水下应用 6000米随着各国对海洋资源和各类海洋权益的逐渐重视,水下机器人的发展得到了越来越广泛的重视,其在水下的应用也日趋广泛。
通常水下机器人依据其控制方式的不同可分为:自主式水下无缆潜航器(AUV)和有缆遥控水下机器人(ROV)。
AUV其自身带有供电系统,依靠内部电池进行水下的工作,可執行大范围高精度的水下探测搜寻,但其作业时间、数据传输、作业持续性受到一定的限制;ROV依靠所连接的电缆提供动力并进行数据及其他信息的传输,水下作业时间较长,可实现数据的实时传输,但作业范围受限。
世界上第一台AUV自20世纪50年代问世以来经过了60多年的发展,随着计算机技术、电子科技技术、水下通信技术、材料科学及电池技术的迅速发展,AUV在性能、续航力、功能方面得到了迅猛的突破。
目前在国际范围内6000米深水AUV已经得到了多方面的应用,各国也在深水AUV的研制和开发上步入了快速发展的道路。
1.深海AUV的发展现状1.1 国外AUV的研究成果及现状目前国外所研制的深海AUV主要包括美国Hydroid公司的Bluefin-21(图1)、英国南安普顿国家海洋中心(NOC)的Autosub 6000(图2)、加拿大ISE公司的EXPLORE(图3)、挪威Kongsberg公司的REMUS(图4)及HUGIN、法国ECA公司的A6K(图 5)及冰岛GAVIA公司的Sea Raptor(图6),各产品的性能参数如表1所示。
水下机器人在海洋气候监测中的技术
水下机器人在海洋气候监测中的技术海洋,占据了地球表面约 70%的面积,对于人类的生存和发展有着至关重要的影响。
海洋气候的变化不仅关乎着全球的气候模式,还对生态系统、经济活动以及人类的生活产生着深远的影响。
为了更好地了解和监测海洋气候,各种先进的技术手段不断涌现,其中水下机器人成为了一项极为重要的工具。
水下机器人,也被称为自主式水下航行器(Autonomous Underwater Vehicle,AUV)或遥控式水下航行器(Remotely Operated Vehicle,ROV),是一种能够在水下自主航行或通过远程控制进行操作的设备。
它们配备了各种传感器、摄像机和通信设备,能够深入海洋深处,收集各种有关海洋气候的数据。
在海洋气候监测中,水下机器人所应用的技术涵盖了多个方面。
首先是导航与定位技术。
由于水下环境的复杂性,水下机器人需要精确的导航和定位系统,以确保能够准确地到达指定的监测区域,并在监测过程中保持位置的准确性。
目前,常用的导航技术包括惯性导航、声学导航、卫星导航以及基于地形匹配的导航等。
惯性导航系统依靠测量加速度和角速度来计算位置和姿态的变化,但随着时间的推移,误差会逐渐累积。
声学导航则通过测量声波在水中的传播时间和相位来确定位置,具有较高的精度,但受到水声环境的影响较大。
卫星导航在水面附近可以使用,但在水下信号会受到严重衰减。
地形匹配导航则是利用事先测绘的海底地形数据来进行位置修正,适用于在熟悉的海域进行作业。
其次是传感器技术。
为了监测海洋气候的各种参数,水下机器人搭载了多种类型的传感器。
例如,温度传感器可以测量不同深度和区域的海水温度,这对于研究海洋热传递、海流运动以及气候变化的影响至关重要。
盐度传感器则用于测量海水的盐度分布,盐度的变化与海洋环流、降水和蒸发等过程密切相关。
压力传感器能够帮助确定水下机器人所处的深度,进而分析海洋的垂直结构。
此外,还有溶解氧传感器、酸碱度传感器等,用于监测海洋的化学环境。
五款超深水级AUV:HuginS...
五款超深水级AUV:HuginS...SeAlien:“ 有读者反映引用图片的版权问题,深海智人公众号非常重视,由于已经发表的文章无法替换图片,因此我们删去了上一篇,更新后重新发一遍,给大家带来的不便深表抱歉。
您的批评是我们动力,希望大家多提宝贵建议。
”众所周知,AUV(Autonomous Underwater Vehicle)是一种可以实现自主航行并执行任务的水下航行器,或自主水下机器人,它们无需通过脐带缆从水面获得电力和传输信息,而且严格来讲也不需要领航员的操控和干预。
在军事领域,AUV通常被称为UUV。
1957年,Stan Murphy,BobFrancois 和后来的 Terry Ewart 就在华盛顿大学应用物理实验室开发了第一台AUV,其他早期的AUV是在70年代在麻省理工学院开发的。
今天,AUV已经广泛应用在商业、科学、国防甚至犯罪(非法贩毒)领域。
具体说来,在油气行业,地球物理现场调查、高分辨率高速海底测绘成像、海洋地质调查、管道检查、甚至水下结构检查也越来越普遍;在科学领域,科学家们在AUV上集成各种传感器,用来调查海水中元素、化合物的浓度、光的吸收反射、微生物,最常见的电导率-温度-深度传感器(CTD)、荧光计、PH传感器,甚至用它来作为牵引器,将制定的传感器组件安置在目标位置。
目前来说最大的应用领域还是防务,美国海军将UUV的水下任务归为以下几类:情报、监视和侦察/ 反水雷任务/ 反潜战/ 检测、识别 / 海洋环境学/ 通信、导航网络节点/ 运输工具/ 信息战 / 紧急时刻的定点攻击Oceaneering 收购的C&C Technologies 购置的Kongsberg Hugin 3000型© C&C Technologies▼在过去50多年间,全世界诞生了数百种不同的AUV,但真正商业化打入市场的依旧是那几家,包括Kongsberg Maritime,Hydroid (2008年被Kongsberg Maritime 全资收购),Bluefin Robotics (被美国著名军工企业通用动力公司收购),Teledyne Marine(前身是冰岛的Hafmynd公司,后来被Teledyne 收购),International Submarine Engineering(ISE)有限公司,AtlasElektronik 和OceanScan。
基于机器视觉的自主式水下航行器末端导引系统关键技术研究

五、未来展望
五、未来展望
随着科学技术的不断进步和海洋开发的深入,智能自主式水下航行器技术将 迎来更加广阔的发展前景。未来研究方向和发展重点主要包括以下几个方面:
五、未来展望
1、提高智能化程度:通过研发更加先进的传感器、算法和控制技术,提高水 下航行器的自主决策和自我学习能力,以适应更加复杂的海洋环境。
实验结果与分析
实验结果与分析
通过对所提出的方法进行实验验证,结果表明:基于机器视觉的自主式水下 航行器末端导引系统在稳定性、精度等方面均表现出良好的性能。与传统的导航 和导引方法相比,所提出的方法具有更高的导航精度和更强的环境适应性。此外, 实验结果还表明所提出的方法具有较好的鲁棒性和实时性,可以满足AUV在实际 应用中的需求。
基于机器视觉的自主式水下 航行器末端导引系统关键技
术研究
01 引言
03 研究方法 05 结论与展望
目录
02 文献综述 04 实验结果与分析 06 参考内容
引言
引言
随着海洋探测和军事应用的不断发展,自主式水下航行器(AUV)已成为研究 热点。然而,AUV在执行任务时面临着复杂的海洋环境,如流速、水质等因素的 影响,使其导航和导引系统的设计具有挑战性。为了提高AUV的导航精度和自主 性,机器视觉技术被引入到AUV的末端导引系统中,成为解决这一问题的关键技 术之一。
二、智能自主式水下航行器技术 的研究现状
二、智能自主式水下航行器技术的研究现状
智能自主式水下航行器技术是集机械设计、电子工程、计算机科学、海洋科 学等多学科于一体的综合性技术。目前,该领域已经取得了一定的研究成果,如 具备自主导航、避障、水下潜行等功能的水下航行器。然而,仍然存在许多技术 瓶颈和挑战,如高能量密度电池的研发、水下通信技术的突破以及水下机器人的 智能化程度等。
自主水下机器人智能控制与参数优化技术
汇报人:日期:•自主水下机器人概述•自主水下机器人智能控制技术•自主水下机器人参数优化技术•自主水下机器人实验与性能评估•总结与展望目录自主水下机器人概01述定义自主水下机器人(Autonomous Underwater Vehicle,AUV)是一种能够自主航行、执行任务并具有智能感知和决策能力的水下机器人。
特点自主水下机器人具有自主性、灵活性、高效性、可靠性等特点,能够在复杂的水下环境中独立完成任务。
自主水下机器人的定义与特点自主水下机器人技术已经在全球范围内得到广泛研究和应用,特别是在军事、海洋资源开发、海洋科学研究等领域。
一些国家已经拥有了较为成熟的自主水下机器人技术和产品。
国外发展现状我国自主水下机器人技术的研究和应用也在逐步发展,一些科研机构和企业已经推出了具有自主知识产权的自主水下机器人产品和解决方案。
国内发展现状自主水下机器人在国内外的发展现状自主水下机器人的应用领域自主水下机器人可以用于情报收集、战场监视、目标追踪等任务。
军事领域自主水下机器人可以用于搜寻失踪人员、打捞沉船等救援打捞任务。
救援打捞自主水下机器人可以用于海底矿产资源勘探、海底管道铺设、海洋渔业等领域的作业。
海洋资源开发自主水下机器人可以用于海洋环境监测、海洋生态系统调查、海底地形地貌勘测等科学研究任务。
海洋科学研究自主水下机器人可以用于水下遗址调查、文物搜寻和保护等考古工作。
水下考古0201030405自主水下机器人智02能控制技术利用模糊逻辑理论对自主水下机器人进行速度和深度控制,提高运动性能和环境适应性。
模糊控制神经网络控制自适应控制通过训练神经网络实现对自主水下机器人的精确控制,适应复杂的海洋环境。
根据海洋环境的变化,自适应调整控制参数,确保自主水下机器人的稳定运行。
03智能控制算法在自主水下机器人中的应用0201深度学习利用深度神经网络对海洋环境进行建模,实现自主水下机器人的环境感知与识别。
强化学习通过强化学习算法训练自主水下机器人的决策策略,提高机器人在复杂海洋环境中的适应能力。
深海探索的新型科技设备
深海探索的新型科技设备深海是地球上最神秘、最复杂的环境之一,覆盖了70%的地球表面,而我们对它的了解却相对较少。
为了更好地探索和研究深海,科学家们不断发展和创新新型科技设备。
这些设备不仅有助于收集海洋数据,还能推动深海资源的开发,保护生态环境。
本文将介绍几种新型深海探索科技设备,并探讨它们的应用与未来发展。
1. 深海无人潜航器(AUV)深海无人潜航器(Autonomous Underwater Vehicle, AUV)是近年来深海探索的重要工具之一。
它能够不依赖于人为操控,通过预设程序自主完成任务。
其主要构造包括推进系统、传感器、控制系统和能源供应系统。
1.1 功能与应用深海无人潜航器广泛应用于海洋勘探、环境监测、资源评估等领域。
首先,它可以在复杂的水下环境中进行长时间的自主巡航,采集各种水文数据,如温度、盐度和氧气含量。
其次,AUV可以携带高分辨率的声呐和摄像头,进行海床地形测绘和生物观测。
此外,它们也被用于沿岸地区的污染监测和海洋生态调查。
1.2 发展现状当前,世界各国均在加强AUV的发展。
例如,美国的“波士顿”型AUV、中国的“海洋之光”型AUV等,都具备高效能和智能化控制功能。
同时,随着人工智能(AI)技术的发展,未来的AUV将能够更加智能地进行数据分析及决策,从而提升探索效率。
2. 深潜载人潜艇深潜载人潜艇是用于深入水下急需人类参与操作的一种设备。
与无人潜航器不同,载人潜艇可以在极高水压和低温环境下,为科研人员提供直接观察和操作能力。
2.1 技术特点现代深潜载人潜艇通常采用先进的材料,如钛合金和复合材料,以抵御极端的水压。
在动力系统上,多数潜艇使用电动推进,搭载高效能电池组,以保证长时间的作业。
此外,这些潜艇还配备了高清摄像设备和机器人手臂,以便进行精细操作。
2.2 重要任务近年来,深潜载人潜艇在科学考察中发挥了巨大作用。
例如,“阿尔文”号潜艇已经探测到马里亚纳海沟的深处,对通道生物及地壳运动进行了深入研究。
国外自主式水下航行体(AUV)研发现状比较

国外自主式水下航行体(AUV)研发现状比较一、现状与趋势背景自主式水下航行体(AUV)是水下无人航行器(UUV)的一种。
水下无人航行器(UUV)技术无论在军事上、还是民用方面都已不是新事物,其研制始于50年代,早期主要用于海上石油与天然气的开发等,军用方面主要用于打捞试验丢失的海底武器(如鱼雷),后来在水雷战中作为灭雷具得到了较大的发展。
80年代末,随着计算机技术、人工智能技术、微电子技术、小型导航设备、指挥与控制硬件、逻辑与软件技术的突飞猛进,自主式水下航行体(AUV)得到了大力发展。
由于AUV摆脱了系缆的牵绊,在水下作战和作业方面更加灵活,该技术日益受到发达国家军事海洋技术部门的重视。
AUV的战略意义AUV是一种综合了人工智能和其他先进计算技术的任务控制器,集成了深潜器、传感器、环境效应、计算机软件、能量储存、转换与推进、新材料与新工艺、以及水下智能武器等高科技,军事上用于反潜战、水雷战、侦察与监视和后勤支援等领域。
(1)反潜战AUV上装备有先进的探测设备和攻击武器,可用于跟踪并攻击敌方潜艇,并在完成任务后返回母艇。
AUV也可作为诱饵,将敌方潜艇引开。
AUV还可作潜艇远距离水下通实用文档信的中继站,增加母艇的隐蔽性。
在搜索侦察方面,AUV可作为艇外水声或尾流传感平台进行区域监视和情报收集。
(2)水雷战在水雷战中,AUV可携带1枚或多枚水雷头自主航行到目标海域实施水雷布放,装备前视声纳和侧视声纳,可用于探测水雷、监视可疑雷场。
(3)目标靶装上靶雷的有关设备后,AUV可用于靶场试验、鱼雷鉴定、或日常操练中充当靶雷,以试验、鉴定鱼雷的性能或提高海军使用鱼雷的作战能力。
(4)侦察与监视大型AUV续航时间长,可航行至敌方或危险海域执行侦察和监视任务,能够长时间隐蔽地采集信息。
战争时期,还可为两栖突击队侦察水雷、障碍等开辟水下进攻通道。
(5)后勤支援AUV可向海水中投放通信和导航装置,成为前方部署的网络中心的节点。