汽车倒车防撞系统课程设计
基于单片机的倒车防撞预警系统毕业设计

基于单片机的倒车防撞预警系统毕业设计倒车防撞预警系统是一种能够帮助驾驶员在倒车过程中避免碰撞的设备。
本文基于单片机设计了一种倒车防撞预警系统,并进行了详细的介绍。
该系统主要由倒车传感器、控制电路、显示屏和蜂鸣器组成。
其中,倒车传感器用于检测车辆周围的障碍物,通过将传感器输出的数据传给控制电路进行处理。
控制电路根据接收到的传感器数据,计算出障碍物与车辆的距离,并控制显示屏和蜂鸣器发出相应的警报。
在设计中,我们选择了超声波传感器作为倒车传感器,因为它能够准确地测量障碍物与车辆的距离。
我们将超声波传感器固定在车辆的后部,并将其与单片机相连。
当车辆开始倒车时,超声波传感器开始工作,并将检测到的障碍物距离传给单片机。
单片机接收到传感器数据后,根据一定的算法计算出车辆与障碍物的距离,并根据距离的大小决定是否发出警报。
为了方便驾驶员了解障碍物的距离,我们在车辆驾驶室内安装了一个显示屏,用于显示障碍物与车辆的距离。
当障碍物与车辆的距离小于一定值时,系统还会通过蜂鸣器发出警报,提醒驾驶员注意。
在系统的设计过程中,我们考虑到了多种因素。
首先,我们要确保传感器的数据准确性,要选择合适的传感器并进行校准。
其次,我们要考虑到驾驶员对系统的操作是否方便,要保证显示屏和蜂鸣器能够清晰地传达信息。
最后,我们还要考虑系统的可靠性和稳定性,要进行充分的测试和优化。
倒车防撞预警系统可以提高驾驶安全性,避免驾驶员在倒车过程中因为盲区而发生碰撞。
我们通过基于单片机的设计,实现了一个简单有效的倒车防撞预警系统。
通过这个设计,我们还深入了解了单片机的应用和原理。
希望这个设计能够对相关领域的研究和开发工作提供一些参考和启示。
汽车倒车防撞报警系统任务书

4、仿真成功后,利用Protel软件制作电路板,进行实物制作。
二、主要设计内容:
1、搜集整理资料,分析比较各种汽车倒车防撞报警系统的设计方案,根据设计要求确定最终设计方案;
2、通过对各单片机性能的比较以及参数的计算,进行单片机的选择;
3、进行发射接收电路、报警电路、显示电路等各单元电路的设计,绘制系统原理图、印制板图等;
14.Paul M Chirlian. Analysis and Design of Intergrated Electronic Circuits.[M]New
York:Harpre and Row Publ. 1999.
15.J.Ffynlo Craine,Graham R.Martin,Microcomputers in Engineering and Science,Addison Wesley Publishing Company,Wokingham,England,1990
毕业设计任务书(理工)
学院
电气与电子工程学院
学生姓名
专业
电子信息与科学技术班级Fra bibliotek学号指导教师
职称
课题名称
汽车倒车防撞报警系统
起止日期
自2012年月日起至2012年月日
一、课题来源、目的与要求:
课题来源:
联系生产实际的课题
课题目的:
本课题主要研究进行汽车倒车防撞报警系统的设计。通过该课题的设计,使学生熟悉汽车倒车防撞报警系统的组成及工作原理,加深对单片机软、硬件系统的理解与掌握,熟悉单片机应用系统的设计方法和调试过程,提高学生单片机应用系统的硬件设计、软件设计的能力和新器件的应用能力。
汽车倒车防撞系统设计与实现

XXXXXXX学院毕业设计(论文)论文题目:汽车倒车防撞系统设计与实现系所:电子工程系专业:嵌入式系统工程学生姓名:学生学号:指导教师:导师职称:讲师完成日期:2013 年 5 月2 日Dalian Neusoft Institute of Information Technology汽车倒车防撞系统设计与实现摘要随着汽车的日益普及和停车场越来越拥挤,由于这些低速行驶的车辆与其它车辆非常接近,而且驾驶员的视野也颇受限制,碰撞事故时有发生。
在夜间时则更显突出。
而本设计进行的汽车防撞设计可以在驾驶员对车尾与障碍物体的距离远近无法目测和判断时利用单片机的实时控制和数据处理功能测量并显示汽车与障碍物之间的距离。
将车辆行驶中被动防撞向主动预防的方向发展,体现了“以人为本”的驾驶理念。
本系统采用STC89C52单片机作为主控制器,在智能循迹小车的基础上安装超声波模块实现汽车倒车防撞系统设计。
本设计主要由STC89C52单片机主控模块、TCRT5000循迹模块、L298N驱动模块、直流电机、小车底板、电源模块、超声波测距模块等组成。
主要完成自动循迹、无接触检测障碍物,防止小车碰撞等功能。
关键词:单片机,超声波传感器,智能循迹Design and Implementation of VehicleReversing Anti-collision SystemAbstractAlong with the increasing popularity of the automobile and car parks more crowded because of these low speed vehicles and other vehicles is very close, and the driver's field of vision is pretty limited, and collisions occur. At night time it is even more prominent. Design of automotive collision objects can car drivers and barriers of distance cannot be visually judged using single chip real-time control and data processing functions to measure and display the distance between the car and obstacles. Passive collision avoidance in vehicle driving the proactive direction, reflecting the "people-oriented" driving ideas.The system uses STC89C52 as the primary controller, intelligent traction trolley car reversing ultrasonic module installed on the basis of collision avoidance systems design. Intelligent tracking cars mainly consists of STC89C52 single-chip computer control module, the TCRT5000 tracking module, L298N driver module, backplane, power supply modules with DC motors, trolley and other components.Key words: MCU, ultrasonic sensor , smart tracking目录摘要 (I)ABSTRACT........................................................................................... I I 第1章项目概述 . (1)1.1项目背景 (1)1.2项目简介 (2)1.3应用范围 (2)第2章项目实施方案 (4)2.1概述 (4)2.2开发环境 (4)2.3硬件方案选择 (4)2.3.1硬件系统框图 (4)2.3.2单片机的选择 (4)2.3.3测距方案选择 (6)2.4硬件设计 (7)2.4.1单片机最小系统 (7)2.4.2循迹模块电路设计 (8)2.4.3超声波测距模块电路设计 (9)2.4.4驱动模块电路设计 (14)2.5软件设计 (14)第3章项目实施过程 (17)3.1硬件实现过程 (17)3.2软件实现过程 (17)3.2.1 KEIL集成开发环境介绍 (17)3.2.2主函数 (19)3.2.3超声波测距模块子程序 (20)3.3调试过程 (21)3.3.1硬件测试 (21)3.3.2 软件调试 (22)第4章项目成果 (23)4.1硬件成果物 (23)4.1.1 电路原理图 (23)4.1.2 PCB版图 (25)4.1.3 实物图 (27)4.2软件成果物 (27)第5章结论 (28)参考文献 (29)致谢 (30)附录 (31)第1章项目概述当前社会经济的不断发展和工业科学技术的不断提高,汽车已逐渐进入不少百姓家。
汽车防碰倒车撞报警系统设计.

目录摘要 (1)目录 (1)绪论 (3)第一章汽车防撞报警系统设计简介 (4)1.1 设计概要 (4)1.1.1设计任务与要求 (4)1.1.2研究方法 (4)1.1.3解决的关键问题 (4)1.2 汽车防撞报警系统设计的意义 (5)第二章设计思路分析 (7)2.1 系统总体方案 (7)2.2 工作原理 (8)2.3 控制器AT89C2051的功能特点 (8)第三章系统硬件电路设计 (9)3.1 系统硬件方案设计 (9)3.2 遥控器控制框图 (10)3.3 工作原理剖析 (11)3.3.1传感器的选择 (11)3.3.2超声波的发射与接收电路 (11)3.3.3测速原理 (12)3.4 实物设计所能达到的功能及操作说明 (12)第四章系统软件电路设计 (14)4.1 主程序 (14)4.2 串口通信模块——transplant.C (15)4.3 程序编写 (16)第五章调试与测试 (18)总结 (19)参考文献 (20)附录1 (20)附录2 (22)致谢 (25)绪论随着时代的发展及社会的进步,越来越多的汽车进入了普通人的家庭。
汽车逐渐成为人们生活中不可缺少的一部分。
尽管公路条件在不断地改进,但仍然避免不了公路上汽车拥挤的现状,再加上设计车速不断提高,恶性交通事故无时无刻不在发生,给人们和社会带来了巨大的生命与财产损失。
汽车防撞报警系统也因此应用而生。
汽车防撞报警系统是一种当汽车离障碍物较近时向司机预先发出报警信号的装置,通常系统的各个探测器安装于汽车的几个关键的车身部位,能探测到接近车身的行人、车辆和周围的障碍物,能向司机或乘客提前发出即将发生撞车危险的信号,促使司机甚至撇开司机采取应急措施处理特殊险情,避免损失。
同时当汽车发生故障时,可以通过按动警示信号键向过往的车辆发送无线警示信号,提醒过往车辆的司机注意,从而更有效地避免交通事故的发生。
汽车的各种方便性正不断地被人们所接受,现如今如同是一般的家用电器一样地进入平常百姓的家中,开发本系统,可以广泛地安装于各种家用轿车、客车、货车等,如与车载微型电脑相配合,可以实现更多的人工智能化操作,是实现汽车无人驾驶必不可少的一个组成部分,也是未来汽车的发展方向,因此运用前景是相当可观。
传感器课程设计--汽车倒车防撞雷达系统设计
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
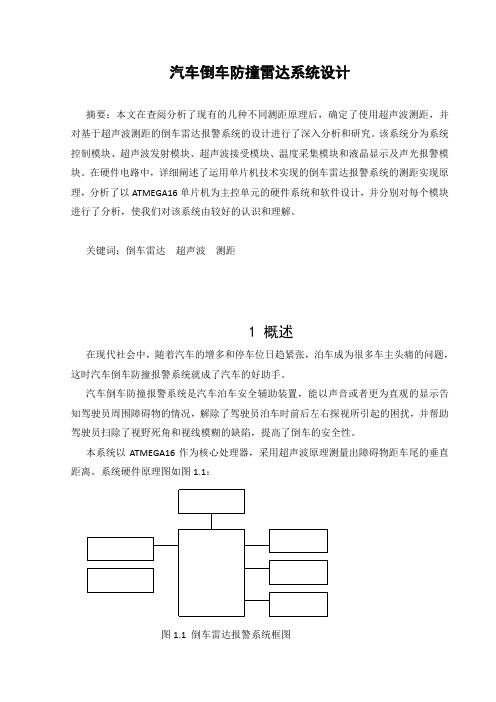
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。
汽车倒车防撞报警系统设计

汽车倒车防撞报警系统设计引言 (1)1.方案选择与分析 (2)1.1 实现功能 (2)1.2 系统总体方案介绍 (3)2.系统硬件设计 (4)2.1 SPCE061芯片特性 (4)2.1.1 SPCE061简介 (4)2.1.2 芯片特性 (5)2.2 电源模块 (5)2.3 放音模块 (6)2.4 超声波测距模组 (7)2.4.1 超声波谐振频率发生电路,调理电路 (7)2.4.2 超声波回波接受处理电路 (7)2.4.3 超声波测距模组电源接口 (8)2.4.4 超声波测距模式选择跳线 (8)2.5 转接板 (9)2.5.1 转接板电路 (9)2.5.2 显示电路 (10)3.系统软件设计 (11)3.1 软件结构 (11)3.2 超声波测距原理 (11)3.3 各模块程序说明 (13)3.3.1 超声波测距程序 (13)3.3.2 语音播放程序 (15)3.3.3 显示刷新程序 (17)3.3.4 主程序 (18)4.连接操作与说明 (20)结论 (22)参考文献 (23)引言倒车报警又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车报警大多采用超声波测距原理,驾驶者在倒车时,启动倒车报警,在控制器的控制下,由装置于车尾保险杠上制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控。
倒车报警的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。
本方案采用语音提示的方式,利用SPCE061A 单片机所具备的单芯片语音功能,外接三个超声波测距模组,组成一个示例的倒车报警系统,语音提示报警(0.35m~1.5m)范围内的障碍物。
基于单片机的倒车防撞预警系统设计
基于单片机的倒车防撞预警系统设计倒车防撞预警系统是一种广泛应用于汽车上的辅助设备,可以帮助驾驶员在倒车过程中避免与障碍物发生碰撞。
本文将介绍一个基于单片机的倒车防撞预警系统的设计。
一、系统设计方案1.硬件设计部分:(1)超声波传感器:用于检测倒车车辆后方距离的变化,一般使用多个超声波传感器进行检测。
(2) 单片机(如Arduino):用于接收超声波传感器的信号并进行处理,同时控制显示器和蜂鸣器发出预警信号。
(3)显示器:用于显示倒车车辆后方的障碍物距离,可以使用LCD显示屏。
(4)蜂鸣器:用于发出声音预警信号,提醒驾驶员注意。
2.软件设计部分:(1)超声波传感器信号处理:单片机接收超声波传感器的信号,并进行滤波和幅值处理,得到障碍物距离值。
(2)倒车距离显示:将障碍物距离值显示在LCD屏幕上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(3)声音预警:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
二、系统实现步骤1.硬件实现:(1)连接超声波传感器:按照超声波传感器的规格书连接传感器与单片机。
(2)连接LCD显示屏:将LCD显示屏连接到单片机。
(3)连接蜂鸣器:将蜂鸣器连接到单片机。
2.软件实现:(1)单片机初始化:初始化单片机,设置IO口的输入输出模式和引脚功能。
(2)读取超声波传感器信号:通过IO口读取超声波传感器的信号,并进行幅值处理,得到障碍物距离值。
(3)显示距离信息:将障碍物距离值显示在LCD显示屏上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(4)发出声音预警信号:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
三、系统测试和优化1.测试:将倒车防撞预警系统连接到倒车车辆上,进行实际测试。
测试过程中要注意校准超声波传感器和LCD显示屏的正确读数,以及蜂鸣器声音的预警效果。
2.优化:根据实际测试结果优化系统设计,可考虑加入其他传感器,如摄像头等,提高系统的准确性和可靠性。
程磊-汽车倒车防撞告警电路设计.
东北石油大学课程设计2016年 2 月26 日东北石油大学课程设计任务书课程光电检测技术题目汽车倒车防撞告警电路设计专业应用物理姓名程磊学号120901340106主要内容:应用语音专用集成电路,红外集成传感器,设计汽车倒车防撞告警电路,使其当接近障碍物时发出“请注意”的声音。
基本要求:1)设计汽车倒车防撞告警电路功能框图。
2)设计红外探测电路、语音发生电路、间频功率放大电路、电源变换电路。
3)当客人离门1米左右时发出“请注意”的声音。
4)调试安装。
5)完成课程设计总结报告。
主要参考资料等:1)陈有卿编著. 新颖集成电路制作精选[M]. 人民邮电出版社, 2005.4.2) 陈振官,陈宏威等编著.光电子电路制作实例[M]. 2006.4.3) 黄继昌等编著.检测专用集成电路及应用[M]. 2006.10.完成期限2016.2.22~2016.2.26指导教师专业负责人2016年2 月19 日第1章概述1.1选题背景随着社会经济的发展交通运输业日益兴旺,汽车的数量也在大幅攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行。
汽车倒车防撞测距报警器一般有四种:1嘀嘀声加闪光,2音乐声加闪光,3语音声加闪光,4倒车到危险距离时发出警报声的超声波倒车报警器,由于很多研究都采用的是特殊难购的专用元件,使其难以推广,本设计采用国内生产的通用元件,成本较低廉,本设计使其在整个倒车过程中自动测量车尾到最近障碍物的距离,在倒车到极限距离时会发出急促的警告声,提醒驾驶员注意刹车,如果和制动系统联系在一起也可以形成自动刹车。
1.2发展前景科学技术为第一生产力.科学技术的日新月异,使得安防产品的发展出现了前所未有的变化。
汽车倒车防撞测距报警器是国家八.五期间重点开发的重大科研项目之一。
本设计可望成为驾驶员特别是货车以及公共汽车驾驶员的好帮手,可有效的减少和避免那些视野不良的大型汽车的如冷藏车、集装箱车、垃圾车、食品车、载货车、公共汽车等倒车交通事故,另外还特别适用于夜间辅助倒车、倒车入库以及进入停车场停车到位,甚至还能防止盗贼扒车,本设计成本低廉,性能优良,市场前景极为广阔,对提高我国汽车工业实际水平,具有较大的时间意义。
机电倒车防撞系统课程设计
机电倒车防撞系统课程设计一、课程目标知识目标:1. 让学生理解并掌握机电倒车防撞系统的基本原理和组成;2. 让学生了解并掌握倒车雷达、摄像头等传感器的原理和应用;3. 让学生掌握机电控制系统在倒车防撞系统中的作用及其工作原理。
技能目标:1. 培养学生运用所学知识,分析和解决实际问题的能力;2. 培养学生通过查阅资料、团队协作,设计并实现一个简单的机电倒车防撞系统的能力;3. 提高学生的动手实践能力,使其能够熟练操作相关设备。
情感态度价值观目标:1. 激发学生对机电工程领域的兴趣,培养其探索精神和创新意识;2. 培养学生关注交通安全,认识到科技在保障交通安全中的重要作用;3. 培养学生的团队协作意识,使其在合作中学会尊重他人、沟通协调。
课程性质分析:本课程为实践性较强的课程,旨在让学生将所学理论知识与实际应用相结合,提高学生的动手能力和创新能力。
学生特点分析:学生为高中二年级学生,具备一定的物理、数学基础,对机电领域有一定了解,对实践活动有较高的兴趣。
教学要求:1. 注重理论与实践相结合,让学生在实际操作中掌握知识;2. 采用项目式教学,培养学生的团队协作能力和创新能力;3. 关注学生的个体差异,因材施教,确保每个学生都能达到课程目标。
二、教学内容1. 理论知识:a. 机电倒车防撞系统的基本原理;b. 倒车雷达、摄像头等传感器的原理和应用;c. 机电控制系统在倒车防撞系统中的作用及其工作原理;d. 交通安全相关知识。
2. 实践操作:a. 分析并设计简单的机电倒车防撞系统;b. 操作倒车雷达、摄像头等设备,进行数据采集和处理;c. 搭建并调试机电控制系统,实现倒车防撞功能。
3. 教学大纲:第一周:介绍机电倒车防撞系统的基本原理和组成,学习倒车雷达、摄像头等传感器原理;第二周:学习机电控制系统在倒车防撞系统中的作用,分析实际案例;第三周:分组进行项目设计,制定项目计划,明确分工;第四周:实践操作,搭建和调试机电倒车防撞系统;第五周:验收成果,展示和评价各组设计作品。
汽车倒车防撞报警系统设计毕业设计论文

毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于单片机的汽车倒车防撞系统的设计

题目基于单片机的汽车倒车防撞系统的设计学生姓名郭真子学号 ********** 所在学院物理与电信工程学院专业班级电子1201班指导教师王婷完成地点博远楼#物理与电信工程学院实验室2016 年 6 月 5 日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级电子1201 学生姓名郭真子一、毕业论文﹙设计﹚题目基于单片机的汽车倒车防撞系统的设计二、毕业论文﹙设计﹚工作自 2016 年 1 月 10 日起至 2016 年 6 月 15 日止三、毕业论文﹙设计﹚进行地点: 陕西理工学院四、毕业论文﹙设计﹚的内容要求:基于单片机的超声波脉冲测距原理,利用超声波的反射测量距离设计一倒车防撞系统,在整个倒车过程中自动测量车尾到最近障碍物的距离,并用数字显示出来,在倒车到极限距离时会发出急促的警告声,提醒驾驶员注意刹车,如果和制动系统联系在一起也可以形成自动刹车。
(应包括方案设计、比较与论证、分析与计算、电路图与相关设计文件以及心得体会等)。
五、毕业论文﹙设计﹚应收集资料及参考文献:收集单片机编程、超声波测距等方面的专业资料,阅读和学习下列参考文献:[1] 张齐,杜群贵.《单片机应用系统设计技术》[M].电子工业出版社.2007[2] 胡瑞,周锡青.基于超声波传感器的测距报警系统设计[J].科技信息,2009[3] 于京.《51系列单片机C程序设计与应用方案》[M].中国电力出版社.2002.[4] 张齐,杜群贵.《单片机应用系统设计技术》[M].电子工业出版社.2004[5] 赵占林,刘洪梅.超声波测距系统误差分析及修正[J].科技情报开发与经济 ,2002[6] 宋明耀.提高超声波测距精度的设计[J].测试测量.2004六、毕业论文﹙设计﹚的进度安排:1月10日——3月20日:查阅资料,完成外文翻译原文和开题报告。
3月21日——4月20日:完成系统硬件电路的设计并提交中期检查报告。
4月21日——5月20日:完成整体设计并调试,准备作品验收。
倒车防撞系统课程设计

倒车防撞系统课程设计一、课程目标知识目标:1. 学生能够理解倒车防撞系统的基本原理与功能;2. 学生能够掌握倒车防撞系统中涉及的关键技术,如传感器、控制器和执行器;3. 学生能够了解倒车防撞系统在现实生活中的应用及其对交通安全的重要性。
技能目标:1. 学生能够运用所学知识分析倒车防撞系统的运作过程;2. 学生能够通过小组合作,设计并制作一个简单的倒车防撞系统模型;3. 学生能够运用所学的调试方法,优化倒车防撞系统的性能。
情感态度价值观目标:1. 学生对倒车防撞系统产生兴趣,培养对汽车电子技术的热情;2. 学生通过小组合作,培养团队协作精神和沟通能力;3. 学生意识到科技创新在提高交通安全中的重要性,增强社会责任感。
课程性质:本课程属于技术与工程领域,旨在让学生了解并掌握倒车防撞系统的基本原理和设计方法。
学生特点:六年级学生具备一定的物理知识和动手能力,对新鲜事物充满好奇,喜欢动手实践。
教学要求:结合学生特点,注重理论与实践相结合,充分调动学生的积极性,提高学生的动手能力和创新能力。
在教学过程中,注重目标分解,确保学生能够达到预期的学习成果。
二、教学内容1. 倒车防撞系统的基本原理- 系统工作原理介绍- 涉及的关键技术概述2. 倒车防撞系统的关键技术- 传感器的类型与原理- 控制器的功能与设计- 执行器的种类与工作原理3. 倒车防撞系统的实际应用- 系统在汽车上的安装与使用- 生活中的实际案例分析4. 倒车防撞系统模型设计与制作- 设计思路与要求- 制作过程与方法- 调试与优化5. 教学内容的安排与进度- 原理学习:2课时- 关键技术研究:3课时- 实际应用分析:1课时- 模型设计与制作:4课时教材章节关联:- 《技术与工程》教材第三章:传感器及其应用- 《技术与工程》教材第四章:控制器设计与实现- 《技术与工程》教材第五章:执行器及其控制教学内容根据课程目标进行选择和组织,注重科学性和系统性。
在教学过程中,结合教材相关章节,确保学生能够系统地掌握倒车防撞系统的知识,为后续的实践操作打下基础。
汽车倒车防撞系统课程设计
审定成绩:____________现代汽车电控系统课程设计设计题目:汽车倒车防撞系统设计_单位(系别):______自动化系_______ _学生姓名:_____ _王555__________专业:_____自动化专业____ __班级:______05125555_____ ___学号:_____2013255555_____ __指导教师:_______张55__________填表时间:2016 年 6 月摘要汽车作为现代社会最主要的交通工具,数量越来越多,但是交通事故的发生频率逐年增长,其中因倒车发生的事故占很大的比例。
随着科技的发展,这类的问题得到了解决,人类发明了智能交通系统,其中汽车智能倒车防撞技术关键在于智能实时的测出汽车与障碍物的距离。
当汽车与障碍物之间的距离小于设定的安全距离时,防撞系统就自动报警并采取制动措施。
为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车倒车防撞报警系统。
本课程设计是以AT89C51单片机为核心的倒车防撞系统增加汽车倒车时的安全性的倒车防撞系统,利用超声波进行无接触的测距,系统主要包括超声波发射模块、信号接收模块、单片机处理模块、数码显示模块以与声光报警模块等部分组成。
汽车在行驶和倒车过程中自动检测到障碍物,然后通过超声波测距原理测量出汽车与障碍物之间的距离,并通过数码显示模块将测得的距离显示出来,当汽车与障碍物之间的距离达到安全极限时,单片机控制声光报警模块发出报警信号,达到提醒司机防止撞车的目的。
本设计充分发挥了单片机的性能,其硬件电路简单,软件功能完善,控制系统可靠,具有一定的使用和参考价值。
【关键词】单片机AT89C51 超声波测距汽车防撞预警目录前言 (4)第一章汽车倒车防撞系统概述 (5)第一节倒车防撞系统研究背景与意义 (5)第二节倒车防撞系统简介 (6)第二章倒车防撞系统总体设计 (7)第一节倒车防撞系统设计原理 (7)第三章倒车防撞系统硬件设计 (11)第一节倒车防撞系统使用元件 (11)第二节倒车防撞系统电路设计 (16)第三节硬件电路总设计 (21)第四节系统使用元器件清单 (23)第四章倒车防撞系统程序设计 (23)第一节防撞系统工作过程 (24)第二节防撞系统程序设计 (25)结论 (30)参考文献 (31)前言随着社会经济的发展,交通运输业日益兴旺,汽车的数量在大副攀升。
防碰撞系统课程设计
防碰撞系统课程设计一、课程目标知识目标:1. 学生能够理解防碰撞系统的基本原理,掌握相关的物理知识,如牛顿运动定律和碰撞理论。
2. 学生能够描述不同类型的防碰撞技术,并了解其在实际应用中的优缺点。
3. 学生能够解释防碰撞系统在交通安全中的作用,并列举其在现代交通工具中的具体应用。
技能目标:1. 学生能够运用物理知识分析碰撞过程,提出减少碰撞伤害的方法。
2. 学生能够运用数学知识,计算碰撞相关的速度、加速度和距离等参数。
3. 学生能够通过实验和模拟,设计和评估简单的防碰撞系统。
情感态度价值观目标:1. 学生能够认识到防碰撞系统的重要性,增强安全意识,培养对交通安全的责任感。
2. 学生能够通过团队合作,培养沟通、协作和解决问题的能力。
3. 学生能够关注科技发展,了解防碰撞技术的创新与进步,激发对未来交通工具发展的兴趣。
课程性质:本课程为科普性与实践性相结合的课程,旨在让学生了解防碰撞系统的相关知识,提高学生的科学素养和实际操作能力。
学生特点:考虑到学生所在年级的特点,课程内容将从实际生活中的例子出发,结合学生的认知水平,采用生动形象的方式进行讲解。
教学要求:教师应注重理论与实践相结合,鼓励学生积极参与讨论、提问和动手操作,以提高学生的主动学习和创新能力。
同时,关注学生的情感态度,引导他们形成正确的价值观。
通过分解课程目标为具体的学习成果,为教学设计和评估提供明确方向。
二、教学内容1. 碰撞原理:讲解牛顿运动定律,分析碰撞过程中的能量转化,探讨减少碰撞伤害的物理原理。
相关教材章节:第二章 动力学,第三节 碰撞运动2. 防碰撞技术:介绍常见的防碰撞技术,如ABS、气囊、自动紧急制动系统等,分析其工作原理和优缺点。
相关教材章节:第三章 交通安全,第一节 防碰撞技术3. 实际应用:讲解防碰撞系统在现代交通工具中的应用,如汽车、火车、飞机等,举例说明其安全效果。
相关教材章节:第三章 交通安全,第二节 防碰撞系统的实际应用4. 实验与模拟:设计碰撞实验和模拟,让学生亲身体验防碰撞技术的效果,提高实践操作能力。
汽车倒车防撞报警系统设计课件
致谢
?Thank You !
目录
? 第一章 引 言 ? 第二章 课题的方案设计与论证 ? 第三章 系统的硬件结构设计 ? 第四章 系统软件的设计 ? 第五章 调试 ?总 结 ?致 谢 ? 参考文献 ? 附录
系统方案设计
? 超声测距系统的电路功能模块包括发射电路、接收电路、 显示电路、核心功能模块单片机控制器及一些辅助电路。
? 汽车倒车防撞报警系统软件设计的主要思路是主要由自动 测距系统、中央处理机、控制系统、距离显示和报警设置 及辅助单元等部分组成。
调试
? 单片机系统的硬件调试和软件调试是不能分开的,许多硬件错误是在软件调试 中被发现和纠正的。但通常是先排除明显的硬件故障以后,再和软件结合起来 调试以进一步排除故障。
汽车倒车防撞报警系统 设计
背景
? 随着汽车的迅速增加,停车难已经是个不争的事实,狭小 的停车场地常常令有车一族无所适从,稍不慎,则闯祸, 烦事又烦人。虽然每辆车都有后视镜,但不可避免地都存 在一个后视盲区。倒车雷达是汽车泊车或者倒车时的安全 辅助装置,能以声音或者更为直观的显示告知驾驶员周围 障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前 后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角 和视线模糊的缺陷,提高驾驶的安全性。倒车雷达的发明 是迫在眉睫的,是必不可少的设备。
超声波接收 器
超声波发射 器
放大电 路
放大电 路
检波电路
定时器
单片机 控制
报警系统
显示 器
硬件结构设计
? 倒车雷达系统主要有主机和探头两部分组成,主机电路包括发射电路、接收电 路、计数显示电路三部分。单片机采用STC89C52。采用12MHz高精度的晶振 ,以获得较计采用分块调试再整体调试的方法,硬件静态的调试包括排除逻辑故障 ,排除失效元器件,排除电源故障 ,最后是联机仿真调试。
基于单片机的汽车倒车防撞系统设计

基于单片机的汽车倒车防撞系统设计汽车倒车防撞系统是现代汽车的重要安全装置之一,其主要功能是帮助驾驶员避免在倒车时发生撞击和碰撞事故。
本文将介绍一个基于单片机的汽车倒车防撞系统设计。
1.系统概述汽车倒车防撞系统由超声波传感器模块、单片机控制模块和蜂鸣器模块组成。
超声波传感器模块用于测量周围的障碍物距离,单片机控制模块负责接收传感器数据并进行处理,最后根据测量结果控制蜂鸣器发出声音警示驾驶员。
2.硬件设计系统采用了传感器模块和单片机模块进行设计。
超声波传感器模块采用了多个超声波传感器,可以实现多个方向同时进行距离测量。
单片机模块采用了一颗高性能的单片机芯片,具备快速处理能力和丰富的接口。
3.软件设计软件设计主要包括以下几个方面:3.1超声波传感器数据采集:通过对超声波传感器发送脉冲信号并接收回波信号,可以计算出测得的距离值。
3.2数据处理和判断:将采集到的距离值与事先设定的安全距离进行比较,当距离小于设定值时,证明有障碍物靠近,需要发出警示信号。
3.3警示信号发出:当检测到障碍物靠近时,单片机控制蜂鸣器发出声音警示驾驶员。
可以通过改变声音的频率和持续时间来表达不同的警示级别。
4.系统测试和优化设计完成后,需要对系统进行测试,并根据测试结果进行优化。
4.1传感器精度和稳定性:测试传感器的测距精度和稳定性,确保传感器测量结果准确可靠。
4.2系统响应时间:测试系统的响应时间,确保系统能够及时发出警示信号。
4.3警示效果:通过模拟实际倒车场景,测试系统的警示效果,确保驾驶员能够准确理解警示信号。
5.总结和展望基于单片机的汽车倒车防撞系统设计可以有效地帮助驾驶员避免倒车事故的发生。
然而,目前的设计还有一些问题需要进一步解决,如系统的稳定性和可靠性需要不断优化,同时还可以考虑引入图像处理技术来提升系统的性能。
总之,基于单片机的汽车倒车防撞系统设计有着广阔的应用前景和发展空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
审定成绩:____________现代汽车电控系统课程设计设计题目:汽车倒车防撞系统设计_单位(系别):______自动化系_______ _学生姓名:_____ _王555__________专业:_____自动化专业____ __班级:______05125555________学号:_____2013255555_____ __指导教师:_______张55__________填表时间:2016 年 6 月摘要汽车作为现代社会最主要的交通工具,数量越来越多,但是交通事故的发生频率逐年增长,其中因倒车发生的事故占很大的比例。
随着科技的发展,这类的问题得到了解决,人类发明了智能交通系统,其中汽车智能倒车防撞技术关键在于智能实时的测出汽车与障碍物的距离。
当汽车与障碍物之间的距离小于设定的安全距离时,防撞系统就自动报警并采取制动措施。
为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车倒车防撞报警系统。
本课程设计是以AT89C51单片机为核心的倒车防撞系统增加汽车倒车时的安全性的倒车防撞系统,利用超声波进行无接触的测距,系统主要包括超声波发射模块、信号接收模块、单片机处理模块、数码显示模块以及声光报警模块等部分组成。
汽车在行驶和倒车过程中自动检测到障碍物,然后通过超声波测距原理测量出汽车与障碍物之间的距离,并通过数码显示模块将测得的距离显示出来,当汽车与障碍物之间的距离达到安全极限时,单片机控制声光报警模块发出报警信号,达到提醒司机防止撞车的目的。
本设计充分发挥了单片机的性能,其硬件电路简单,软件功能完善,控制系统可靠,具有一定的使用和参考价值。
【关键词】单片机AT89C51 超声波测距汽车防撞预警目录前言 (4)第一章汽车倒车防撞系统概述 (5)第一节倒车防撞系统研究背景及意义 (5)第二节倒车防撞系统简介 (5)第二章倒车防撞系统总体设计 (6)第一节倒车防撞系统设计原理 (6)第三章倒车防撞系统硬件设计 (9)第一节倒车防撞系统使用元件 (9)第二节倒车防撞系统电路设计 (13)第三节硬件电路总设计 (17)第四节系统使用元器件清单 (18)第四章倒车防撞系统程序设计 (19)第一节防撞系统工作过程 (19)第二节防撞系统程序设计 (20)结论 (25)参考文献 (26)前言随着社会经济的发展,交通运输业日益兴旺,汽车的数量在大副攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞报警系统势在必行。
超声波是指频率在20kHz以上的声波,它属于机械波的范畴。
近年来,随着电子测量技术的发展,运用超声波作出精确测量已成可能。
随着经济发展,电子测量技术应用越来越广泛,而超声波测量精确高,成本低,性能稳定则备受青睐。
超声波也遵循一般机械波在弹性介质中的传播规律,如在介质的分界面处发生反射和折射现象,在进入介质后被介质吸收而发生衰减等。
正是因为具有这些性质,使得超声波可以用于距离的测量中。
超声波测距即是利用其反射特性,当车辆后退时,超声波距离传感器利用超声波检测车辆后方的障碍物位置,并利用指示灯及蜂鸣器把车辆到障碍物的距离及位置通知驾驶人员,起到安全的作用。
超声波测距法是最常见的一种距离测距方法,应用于汽车停车的前后左右防撞的近距离,低速状况,以及在汽车倒车防撞报警系统中。
现在生产的中高档小轿车大多数都配置有倒车雷达,而出于节省成本等方面的考虑,经济型小轿车、大客车等其他车辆都没有配置倒车雷达。
有市场需求的产品,必然会带动产品的开发设计。
倒车雷达电路种类较多,本文介绍基于单片机错误!未定义书签。
控制的倒车雷达系统,该系统采用通用型单片机作为控制电路,方便系统功能扩展。
系统电路主要采用集成器件构成,外围元件少,电路简洁、调试方便、成本低,利于商品化生产。
第一章汽车倒车防撞系统概述第一节倒车防撞系统研究背景及意义随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有自己的汽车。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
一方面汽车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越来越少;。
另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰撞时有发生。
据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的60%。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,可将车快速准确地停放到指定的位置,因此发明了汽车倒车防撞预警系统。
本课题相对而言研究的比较浅,就是利用超声波声波特性实现非接触式距离测量,进行距离预警。
超声波在空气中测距或在特殊环境下都有较广泛的应用。
利用超声波检测往往比较迅速、方便、计算简单、易于实现实时控制,并且在测量精度方面能达到工业实用的指标要求,因此在汽车倒车防撞系统的研制方面也得到了广泛的应用。
第二节倒车防撞系统简介汽车防撞预警系统是指在汽车行驶过程中防止汽车发生碰撞障碍物的一种智能报警装置。
它能自动发现可能与汽车发生碰撞的障碍物体,并且同时检测汽车与障碍物之间的距离,到达极限距离时发出报警信号以避免碰撞的发生。
根据题目要求,汽车防撞报警器的功能主要有两个:判断汽车与障碍物之间的距离和当汽车与障碍物之间的距离到达临界距离时发出报警信号。
本课程设计是以AT89C51单片机为核心的倒车防撞系统增加汽车倒车时的安全性的倒车防撞系统,利用超声波进行无接触的测距,系统主要包括超声波发射电路,超声波接收电路,数码显示电路以及报警电路。
以超声波传感器为重点进行超声波的发射和接收,利用数字传感器DS18B20进行测量,提高了测量精度,通过计算得出距离并通过LED显示,在超出一定距离时,电铃报警,驾驶员做出判断。
第二章倒车防撞系统总体设计第一节倒车防撞系统设计原理一、设计总体思路概况汽车防撞预警系统的原理是利用超声波的发射和接收,用计时器计出超声波从发射到接收到遇到障碍物后反射声波的时间通过公式计算出汽车与障碍物之间的距离。
在实际生活中常用的测距方法主要有两种,一种是在被测距离的两端,一端设置发射装置,一端设置接收装置,利用公式S =vt得出测量的距离。
这种测量方式特别适用于测量身高;另一种是本次设计采用的方式,利用超声波遇到障碍物后反射得出距离。
汽车防撞系统硬件电路的设计主要包括单片机系统、超声波发射电路和超声波检测接收电路及显示电路三部分。
单片机采用的是AT89C51系列。
为了获得较稳定时钟频率而采用了高精度的晶振,这样极大的减小测量距离的误差。
用单片机P1.0端口输出超声波发射器所需要的40kHz的方波信号,使用外中断0口检测接收超声波的反射信号。
显示电路装置用了结构简单价格便宜的4位LED数码管来显示距离。
超声波的发射装置主要是由反相器74LS04和发射传感器构成。
AT89C51单片机P1.0引脚输出40k赫兹的间断方波信号分成2路,一路信号经过一个反向器后到达TCT40一个引脚,另一路通过两个反向器后到TCT40的另一个引脚,用这种形式将P1.0发出的单片机P1.0端口发出的间断方波信号加到TCT40的两端上,用这种推换形式将间断的方波信号连接到超声波传感器的两个引脚上,这样能够增强超声波的发射强度。
在加载反波信号时使用两个74LS04并联,是它的驱动能力得到了很大的提高。
而电阻R8、R9增大超声波传感器的阻尼效果,缩短了震荡时间,使超声波传感器输出高电平的能力大大增加。
超声波接收采用CX20106A集成电路模块,根据电路图可以看出,集成芯片CX20106在接收装置电路中的作用很大。
CX20106是一款红外线检波接收的芯片,它常用于现实生活中,而且价格便宜。
由于红外线波的频率为38kHz,与测距使用的超声波频率接近。
并且CX20106芯片的内部设置比较好,由于设计中芯片的f5角连接了一个外接电阻,此电阻使他滤波器的中心频率能够调节,当R15的阻值越大滤波器的中心频率就越低,变化范围在30~60kHz之间。
此次设计证明用CX20106A接收超声波信号具有优秀的灵敏特性和较强的抗干扰能力。
超声波测距预警系统主要包括主程序、发射子程序、温度采集子程序、外部中断子程序和数码显示子程序等。
超声波测距预计能够系统主程序第一步是对系统进行初始化,初始化定时器T0为16位定时计数器的工作模式。
全局中断打开并给显示端口清0。
在调用超声波的发生子程序发出一个超声波脉冲,在发射过程中延时约0.1 ms,避免声波信号从发射器发出后直接传送到接收器而引起直射波触发,然后在使用外中断接收遇到物体后返回声波信号。
我采用了12M Hz的晶振,计数器每次计数间隔是1μs,当主程序接收到成功的信号后,将计数器T0中的数计算,即得出与障碍物之间的距离,测出距离后将结果送往LED显示,这就是超声波测距的过程。
在系统调试方面,由于设计的电路由很多集成电路构成。
外围元件很少,所以调试不太难。
只要焊接的电路没有错误,简单调试一下就能够正常使用了。
电路设计中除了集成电路,对其它电子元件也没专业要求。
可以根据测量距离的差异,调整与接收换能器滤波电容就能得到适合灵敏度和超声波抗干扰能力。
二、超声波测距原理超声波测距是通过检测超声波发射后遇到障碍物所反射回来的回波,如图2-1所示。
从而测出超声波发射和接收的时间差T,然后根据公式:S= CT / 2即可算出汽车与被测物体的距离。
S为汽车与障碍物之间的距离,C为超声波在空气中的传播速度。
声速c与温度有关,如温度变化不大,则可认为声速是基本不变的。
如果测距精度要求很高,则应通过温度补偿的方法加以校正。
本设计中设定温度为常温20℃。
图2-1 超声波传播图利用超声波的测距的原理图如框图2-2所示,单片机发出40kHZ的信号,经放大后通过超声波发射器输出;超声波接收器将接收到的超声波信号经放大器放大,用锁相环电路进行检波处理后,启动单片机中断程序,测得时间为t,再由软件进行判别、计算,得出距离数。
数据显示定时器单片机控制放大电路超声波发射器放大电路超声波接收器图2-2超声波测距原理图三、控制系统框图超声波防撞控制系统图如框图2-3所示。
该系统全部都由单片机进行控制,单盘机发出40Hz的方波脉冲,经过超声波发射电路发射出超声波。
超声波在遇到障碍物之后反射射回来再由接收电路接收反射声波信号送入单片机进行分析,计算出汽车与障碍物之间的距离,将处理后的结果送入显示电路经过数码显示管显示出距离,如果距离达到安全的极限距离着由报警电路通过蜂鸣器发车报警,提示司机躲避障碍物。