自升式海洋平台桩腿齿条相位差分析研究
自升式海洋平台齿轮齿条升降装置有限元分析

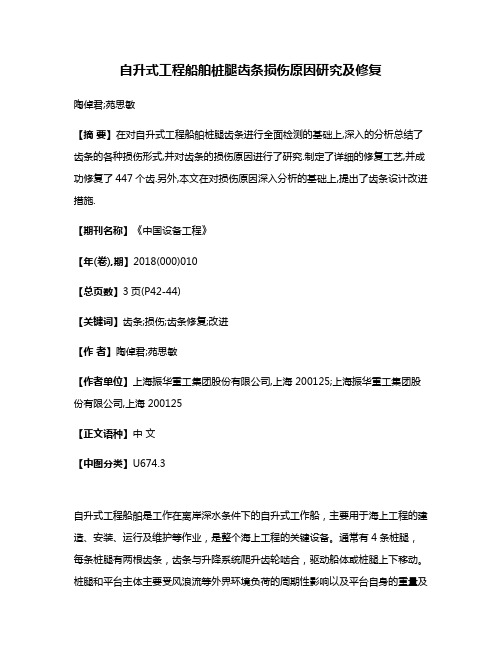
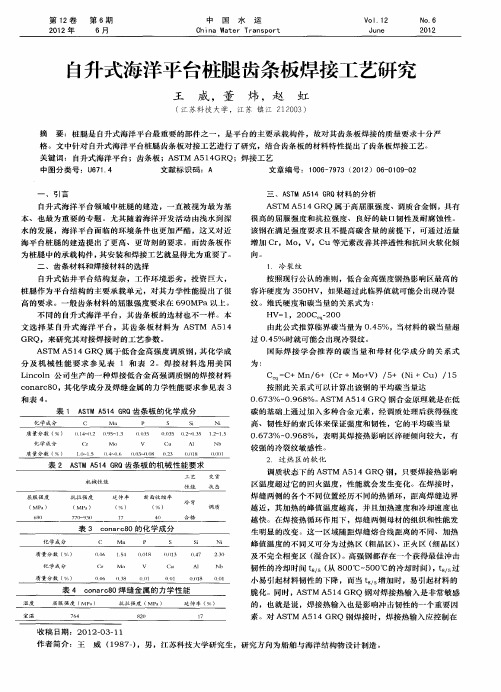
附件接 触 ,此 区域 是最容 易发 生点蚀 。因此主要针 对 05 . s时刻 单 齿啮合 时齿轮 齿 条进 行强 度分 析 。图 8为齿轮 齿条接 触部位 应 力分布 云 图。如 图 8a和 图 8b所 示 ,小 齿轮 与 齿条接 触 区域呈 带状 分布 , () () 沿 小齿 轮 中截面应 力 分布前 后对称 ,最 大接触 应力 分布 于 小齿轮 上 ,小齿 轮与 齿 条接触 边缘 区域 应力 较 大 ,且应 变较大 。
沿 小齿轮 厚度 方 向的应 力变化 曲线 。小齿轮 沿厚度 方 向最大 应 力为 10MP 4O a左右 ,主 要集 中在 小齿 轮 与齿条 接触 的两边 边缘 部位 ,其 余接 触部位 应力 为 10MP 20 a左右 ,分布 比较 均匀 。齿条沿 齿 厚方
向最 大应 为为 1 5 MP 2 0 a左 右 ,主要 集 中与齿 条两 侧边 缘部 位 ;最 小应 力 为 9 0 a左右 ,最 大应 力 0 MP
。
MI se;
S Mi e¥ s
(u : 5 ) A g 7%
(v : 5 A g 7 %)
. .
广 T +10 e+03 .6 7
一
.2o 12i .+ 4 e
2
.
.
.
+2 8+ ,0 3l 0 e
t+ 80 21 .+ 3 e
()齿轮接触部位 a
.
,
7为齿轮 齿条接 触 区域 最 大接触 应 力随 时间变化 的历 程 曲线 。由图 7可 以看 出 , . s 右 由双齿 啮合 03 左 5 区逐渐过 渡 到单齿 啮合 区,双 齿 啮合 区最大接 触应 力变 化 范 围为 80 9 0 a 0 ~ 0MP ,单齿 啮合 区最 大接触
自升式工程船舶桩腿齿条损伤原因研究及修复
自升式工程船舶桩腿齿条损伤原因研究及修复陶倬君;苑思敏【摘要】在对自升式工程船舶桩腿齿条进行全面检测的基础上,深入的分析总结了齿条的各种损伤形式,并对齿条的损伤原因进行了研究.制定了详细的修复工艺,并成功修复了447个齿.另外,本文在对损伤原因深入分析的基础上,提出了齿条设计改进措施.【期刊名称】《中国设备工程》【年(卷),期】2018(000)010【总页数】3页(P42-44)【关键词】齿条;损伤;齿条修复;改进【作者】陶倬君;苑思敏【作者单位】上海振华重工集团股份有限公司,上海 200125;上海振华重工集团股份有限公司,上海 200125【正文语种】中文【中图分类】U674.3自升式工程船舶是工作在离岸深水条件下的自升式工作船,主要用于海上工程的建造、安装、运行及维护等作业,是整个海上工程的关键设备。
通常有4条桩腿,每条桩腿有两根齿条,齿条与升降系统爬升齿轮啮合,驱动船体或桩腿上下移动。
桩腿和平台主体主要受风浪流等外界环境负荷的周期性影响以及平台自身的重量及设备冲击、震动等复杂载荷作用,易造成桩腿齿条等部位疲劳损伤。
而且,工程船船的工作特点与一般钻井平台还有很大区别,钻井平台升降系统工作频率非常低,一年就升降几次。
但是,工程船齿轮齿条不仅负荷大、冲击载荷、转速低,而且在恶劣海洋环境下频繁插拔桩作业。
经过几年的频繁使用,在日常检验发现一些齿条损伤比较严重。
为了排除隐患,延长桩腿齿条的使用寿命,对桩腿齿条进行了全面的检测。
根据检测的结果,研究齿条损伤机理,提出修复方案。
1 齿条检测及结果分析桩腿齿条材质为ASTM A514。
桩腿长度90m,每条桩腿对称分布两根齿条,单侧齿条324个齿。
齿条宽度为140mm。
升降系统和桩腿图片见图1。
利用大模数齿条齿形测量专用工具、无损探伤设备对齿条磨损量、表面金属疲劳剥落、裂纹等进行了全面的检测,并对每个齿进行编号记录。
每条腿共检查360个齿。
从检测的结果看,齿条齿面主要有以下缺陷:(1)齿面塑性变形(翻边)。
自升式平台桩腿不平行原因研究及受力原理分析
平台建造安装-3*程览设doi:10.3969/j.issn,1001-2206.2020.S.011自升式平台桩腿不平行原因研究及受力原理分析曲建冰壬飞",李永青"1•中国船级社海洋工程技术中5,天津3004572•中海油田服务有限公司钻井事业部,北京101149摘要:理想状态下自升式平台各R腿在其使用过程中是平行的,宙于R靴滑移或转动会导致R腿不平Z,国内业界将这种现象称为桩腿劈叉。
随着自升式平台的广泛应用,r腿劈叉现象已在平台实际生产作业中平台。
过自升式平台不作业的,推导自升式平台R腿端部劈叉距离与R腿-载系的公式,R腿不平Z(劈叉)产生的,的产生其的过程Z。
为自升式平台的操作导。
关键词:自升式平台;R腿不平Z;R腿R靴滑移;R靴转动;劈叉Cause research of non-parallel legs of jack-up platform and analysis on force principleQU Jianbing1,WANG Fei2,LI Yongqing21.China Classification Society,Offshore Engineering Technology Center,Tianjin300457,China2.Drilling Department of China Oilfield Services Ltd.,Beijing101149,ChinaAbstract:In ideal condition,the legs of a jack-up platform are parallel.The legs may become non-parallel due to sliding and rotation of the platform spudcan,which is called as splits in the offshore engineering realm of China.As the wide application of jack-up platforms, the splits phenomena have caused damages to the platforms in actual production operation.By analyzing the jack-up platform at different operation stages,and deriving the analytical formulas of the relationship between the distance of split leg ends and the leg loads,the causes of leg splits were revealed,the process of damage happening and damage range extension were analyzed.According to the analysis results,the guiding suggestions are given to the operators of jack-up platforms.Keywords:jack-up platform;non-parallel legs;leg damage;slide of spudcan;rotation of spudcan;splits理想状态下,自升式平台桩腿在其使用过程中是平行的,这种理想的状态需要桩腿在插桩过程中保持桩靴的竖直向下插入,以及站立作业时的桩靴位置不发生变化。
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
自升式海洋平台齿轮齿条接触强度分析
文章编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 7 ) 1 1 — 0 2 8 0 — 0 5
计
算
机
仿
真
2 0 1 7 年1 1 月
自升 式 海 洋 平 台 齿 轮 齿 条 接 触 强 度 分 析
叶福 民, 孟 淼
( 江 苏科 技 大学 机 械 工 程 学 院 , 江苏 镇 江 2 1 2 0 0 0 )
裂纹 对 齿 轮 齿 条 最 大 接 触 应 力 影 响 不 大
关键词 : 自升式平 台; 齿轮齿条 : 裂纹 : 有限元分析 中图分 类号 : T P 3 9 1 . 9 文献标 识码 : B
An a l y s i s o f Co n t a c t S t r e n g t h o f Ge a r a n d Ra c k i n
A B S T R AC T: G e a r r a c k a n d p i n i o n l i t f i n g d e v i c e i s a n i m p o r t a n t f a c t o r t h a t a f f e c t s t h e s f a e t y o f j a c k u p p l a f t o r m, S O i t
m e n s i o n a l mo d e l o f g e a r r a c k a n d t h e n i mp o r t e d i n t o t h e A B A Q U S s o f t w a F e f o r c o n t a c t a n a l y s i s , t h e c o n t a c t s t r e s s ,
偏心受压工况下自升式平台桩腿力学性能研究
偏心受压工况下自升式平台桩腿力学性能研究偏心受压工况是指受力点不在结构的几何中心处,而是在偏离几何中心的位置上。
在自升式平台桩的设计和施工中,偏心受压工况是一个非常常见且重要的情况。
在这种情况下,桩腿的受力状态将会发生变化,需要对其力学性能进行深入研究,以确保结构的安全可靠性。
首先,我们需要了解自升式平台桩的结构和工作原理。
自升式平台桩是一种用于海上油田开发的重要设备,可以提供一个稳定的工作平台,支持各种海上设备和作业人员。
其主要部分包括桩腿、液压系统、升降机构等,其中桩腿是支撑整个平台重量的主要部件。
在偏心受压工况下,桩腿将受到不均匀的荷载作用,可能导致其受力分布不均匀,产生弯矩和剪力等。
因此,需要对桩腿在这种工况下的力学性能进行详细研究。
其中包括以下几个方面:1.桩腿的受力分析:通过建立力学模型,计算桩腿在偏心受压工况下的受力分布,包括内力、位移等参数。
可以通过有限元分析等方法进行计算,得到桩腿的受力状态。
2.桩腿的稳定性分析:在偏心受压工况下,桩腿的稳定性将受到挑战,可能出现局部屈曲或失稳等情况。
需要进行稳定性分析,确保桩腿在受到荷载时不会失稳。
3.桩腿的优化设计:通过对桩腿的结构参数进行优化设计,可以提高其承载能力和稳定性,降低结构的材料消耗和成本。
可以通过参数优化等方法,找到最佳的结构设计方案。
4.桩腿的试验验证:最终需要进行实验验证,验证理论模型的准确性和可靠性。
可以通过模型试验或实际场地试验等方法,检验桩腿在偏心受压工况下的力学性能。
总之,偏心受压工况下自升式平台桩的桩腿力学性能研究是一个复杂而重要的课题,需要综合运用理论分析、数值计算、实验验证等方法进行深入研究。
只有确保桩腿的受力状态稳定可靠,才能保证自升式平台的安全运行和工作效率。
自升式海洋平台桩腿齿条板焊接工艺研究
摘
要 :桩 腿 是 自升 式 海 洋 平 台 最 重 要 的 部 件 之 一 ,是 平 台 的主 要 承 载 构 件 ,故 对 其齿 条板 焊接 的质 量 要 求 十 分 严
格 。文 中针 对 自升 式海 洋 平 台桩 腿 齿 条 板 对 接 工 艺 进行 了研 究 ,结 合 齿 条 板 的 材 料 特 性 提 出 了齿 条板 焊接 工艺 。
第1 2卷 第 6期
201 笠 o1 1 J e un
N 6 o. 201 2
6 月
O na Wa r a p t hi te Tr ns or
自升式海洋平 台桩腿 齿条板焊 接工艺研究
王 威 ,董 炜 ,赵 虹
( 苏 科技 大 学 , 江 苏 镇 江 2 0 江 1 0 3) 2
自升式钻井 平台结构复杂 ,工作 环境恶劣 ,投资 巨大 ,
桩 腿 作 为 平 台结 构 的 主 要 承 载 单 元 ,对 其 力 学 性 能 提 出 了 很
按 照 现 行 公 认 的准 则 ,低 合 金 高 强 度 钢 热 影 响 区 最 高 的
容许硬度为 3 0 5 HV,如果超过 此临界值就可能会 出现冷裂
向。
1 冷 裂 纹
水的发展 ,海洋 平台面临 的环境条件 也更加严酷 ,这又对 近
海 平 台 桩 腿 的建 造 提 出 了更 高 、 更 苛 刻 的 要 求 。而 齿 条 板 作 为 桩 腿 中 的承 载 构 件 , 安 装 和 焊 接 工 艺 就 显 得 尤 为 重 要 了 。 其
二 、齿 条 材 料 和 焊 接 材 料 的选 择
和表 4 。 表 1 A T 5 4 G Q齿 条 板 的化 学 成分 S M A 1 R
自升式海洋钻井平台固桩架力学性能研究
自升式海洋钻井平台固桩架力学性能研究唐文献;钱浩;张建;秦文龙;唐振新;曹俊【摘要】In order to investigate the mechanical performances of Super M 2 jack-up jacking frame under pre-load, working and storm self-existence condition , shell elements were used to mesh jacking frame in this paper . The distribution of the loads were determined by establishing the mechanical model of jacking frame , legs and the stents , comprehensive consideration of the combination effect of the horizontal load and the vertical load , and the effect of angle of wind load and the hull under pre-load, working and storm self-existence condition , and the me-chanical performances were proposed for degrees of 0°,30°,60°,90°and 120°under the condition of pre-load, working and storm self-existence , and discussed the connection stiffness of the hull and legs .The results showed that guides oriented maximum stress under the degree of 30°and 90°and the connection stiffness of the hull and legs were 79.398 N/mm and 82.445 N/mm under the working and storm self-existence condition respectively .%为了研究Super M2自升式海洋钻井平台固桩架在预压、作业、暴风自存工况下的力学性能,文中对固桩架采用壳单元,通过建立固桩架、桩腿及支架处的力学模型,确定载荷的分布,并综合考虑了预压、作业、暴风自存各工况下水平载荷与垂直载荷的组合作用以及风载荷与船体夹角的影响,从而研究了固桩架在0°,30°,60°,90°,120°共5个特征角度时的力学特性,并以此为基础论述了船体和桩腿的连接刚度.研究结果表明:当特征角度为30°和90°时,固桩架导向产生最大应力;且在作业及暴风自存工况下,船体和桩腿的连接刚度分别为79.398 N/mm和82.445 N/mm.【期刊名称】《江苏科技大学学报(自然科学版)》【年(卷),期】2013(000)006【总页数】5页(P518-522)【关键词】自升式平台;固桩架;力学模型;风载荷;有限元分析【作者】唐文献;钱浩;张建;秦文龙;唐振新;曹俊【作者单位】江苏科技大学机械工程学院,江苏镇江,212003;江苏科技大学机械工程学院,江苏镇江,212003;江苏科技大学机械工程学院,江苏镇江,212003;江苏科技大学机械工程学院,江苏镇江,212003;江苏科技大学机械工程学院,江苏镇江,212003;江苏科技大学机械工程学院,江苏镇江,212003【正文语种】中文【中图分类】TE951随着科学技术及经济文明的不断发展,以及人类对石油资源需求的不断增加,世界各国正逐步开发海洋石油资源.自升式钻井平台[1]作为开发海洋石油资源的重要装置,其结构可靠性直接关系到自升式钻井平台的安全问题.自升式钻井平台主要由船体、固桩架、桩腿及桩靴4部分组成,其中固桩架[2-4]是连接船体和桩腿的重要部件,在预压工况下,其主要承受重力载荷,而在作业及暴风自存工况下,主要承受重力及环境载荷,因而对固桩架的力学性能进行研究是十分有必要的.有关自升式钻井平台固桩架的分析已有大量研究,文献[5-6]中对自升式平台站立工况及该工况下主要构件的力学性能进行了研究;文献[7]中在nSoft疲劳分析理论的基础上,运用计算机模拟试验法对固桩架的疲劳问题进行了研究;文献[8]中运用ANSYS软件对固桩架有限元模型进行了应力分析;文献[9-10]中分析了风浪流载荷作用下平台关键部位的结构强度;文献[11-12]中对自升式平台的力学性能研究方法进行了研究和论述.虽然很多学者已经在自升式钻井平台分析方面做了大量工作,但很少有学者通过建立固桩架详细模型来研究船体与桩腿的连接刚度.为此,文中以自升式钻井平台固桩架为研究对象,通过建立固桩架、桩腿及支架处的力学模型以确定载荷分布,并建立固桩架三维有限元模型,运用有限元软件分析研究了自升式钻井平台固桩架在预压、作业、暴风自存工况下的力学性能,并以此为基础对船体和桩腿的连接刚度进行了论述.1 建模1.1 有限元模型文中以Super M2自升式钻井平台固桩架为研究对象,其主要构件有:前承载板,后承载板,侧及下承载板,前支架,后支架,内部加强板,支架加强筋,导向板,导向板加强筋,支撑板,支撑圆管等,具体结构形式如图1.固桩架所有构件材料为:Q345,其弹性模量、屈服强度、泊松比分别为206 GPa,345 MPa,0.3 MPa.由于固桩架是箱体类结构,因而采用壳单元模拟固桩架构件,并约束固桩架与船体连接处节点的6个自由度,所建固桩架三维有限元模型包括91 450个单元,85 281个节点.图1 固桩架网格模型结构示意图Fig.1 Mesh model diagram of Jacking Frame 1.2 载荷固桩架在预压工况、作业工况、暴风自存工况下所匹配的垂直载荷分别为16 032,13 082,11 721 t;而在作业工况、暴风自存工况下承受风载荷的作用,且作业及暴风自存工况下的风载荷设计参数[2]分别为36,51.4 m/s.文中将研究各工况下垂直载荷和水平载荷对固桩架力学性能的综合影响,由于其结构的对称性,因而只需研究120°范围内固桩架的力学性能.1.2.1 水平载荷风载荷的计算方法参照《海洋自升式移动平台设计与研究》[13-14],并假定风载荷方向与船体甲板面平行.在分析风载荷时,可建立力学模型(图2),图2a)所示力学模型中将桁架式桩腿简化为直立杠杆,图2b)为固桩架简化力学模型,其中①,②,③,④,⑤,⑥为固桩架6个上导向板的编号;F为桩腿所受合力;F1为上导向处所受合力;F2为下导向所受合力.a) 直立杠杆型 b)力学模型图2 水平载荷力学模型Fig.2 Horizontal load mechanical model1.2.2 垂直载荷在分析垂直载荷时,可将L型减速器简化成刚性杆杠模型,其受力分析如图3,其中:F 为小齿轮所受合力;F1为后支架所受合力;F2为前支架所受合力.而在现实情况中,前后之架的接触面为半圆柱面,其接触压力按余弦函数方式分布.设P为接触表面压力,Pm为余弦函数分布压力的峰值,x为压力P与接触面的夹角,r,l分别为支架半径和宽度,因而接触压力的表达式为:P=Pm×cos x(1)(2)图3 垂直载荷力学模型Fig.3 Vertical load mechanical model2 结果分析与讨论预压工况下固桩架的应力云图(图4),该工况下最大应力值为98.1 MPa,最小应力值为0.145 MPa;且在最下处后支架接触面产生最大应力,其值为98.1 MPa,其原因为:①前后支架承受载荷时,后支架承受主要载荷;②由于后支架处所有载荷方向都垂直向下,所以最下处后支架受力最大.图4 预压工况应力云图Fig.4 Preload conditions stress cloud作业工况下固桩架的应力云图如图5所示,且当特征角度θ为30°时,右半侧最下处后支架及上导向板下边缘和导向加强筋边缘产生最大应力,最大应力值为123.2 MPa.通过分析可知:①后支架承受的载荷较大,且受力方向全部垂直向下,因而最下处后支架产生最大应力;②右半侧固桩架上导向下边缘及对应导向加强筋边缘处应力较大,主要是由于其承受较大的水平载荷;③将作业工况下固桩架的力学性能与预压工况相比较,可知水平载荷对固桩架力学性能的影响较大.θ=0° θ=30° θ=60° θ=90° θ=120°图5 作业工况应力云图Fig.5 Working conditions stress cloud暴风自存工况下固桩架的应力云图如图6所示,且当特征角为30°,90°时,左、右侧固桩架上导向下边缘及相应导向加强筋边缘产生最大应力,最大应力值为236.7 MPa,这主要由于暴风自存工况下固桩架所承受的水平载荷较大,且固桩架导向本身也存在设计缺陷,从而导致导向处应力值进一步增大.θ=0° θ=30° θ=60° θ=90° θ=120°图6 暴风自存工况应力云图Fig.6 Storm self-existence condition stress cloud固桩架各特征角度下的最大应力值如表1所示,通过对比可知各特征角度下的最大应力都发生在暴风自存工况,且在导向下边缘及相应导向加强筋边缘产生最大应力;通过对比各特征角度下的最大应力值,可知最大应力值会随角度的改变而发生改变,且在一定范围内浮动,尤其当特征角度为30°和90°时,固桩架产生最大应力.表1 固桩架最大应力Table 1 Maximum stress of jackingframeθ/(°)0306090120导向处/MPa204.3236.6213.2236.7202.2通过分析图4,5,6可知,各工况下的最大应力值及发生最大应力区域如表2所示.当只有垂直力作用时,后支架受力最大;而当垂直载荷和水平载荷共同作用,且水平载荷较小时,后支架和导向边缘及相应加强筋边缘都是可能发生屈服的区域;当垂直载荷和水平载荷共同作用,而水平载荷较大时,此时导向边缘及相应加强筋边缘为可能发生屈服的区域.表2 各工况下最大应力Table 2 Maximum stress of all conditions工况预压工况作业工况暴风自存工况应力值/MPa98.1123.2236.7 发生最大应力区域最下处后支架半侧后支架、导向边缘及相应加强筋边缘导向边缘及相应加强筋边缘由于固桩架材料为Q345,其屈服强度σb为345 MPa;并根据船级社规范选取安全系数S=0.85,有:[σ]=S×σb=0.85×345=293.25 MPaσmax=236.7 MPaσmax<[σ]=293.25 MPa所以,固桩架整体满足强度要求.式中:[σ]为Q345屈服应力;σmax为固桩架最大应力.图7,8为固桩架在作业工况、暴风自存工况下发生最大应力时的位移云图,从位移云图中可知,作业工况下导向位移为1.634 mm,暴风自存工况下导向位移为2.871 mm,而此时导向在作业工况及暴风自存工况下的应力值分别为123.2,236.7 MPa,因而可根据公式K=F/s求得作业工况及暴风自存工况下船体与桩腿的连接刚度分别为79.398,82.445 N/mm,从而可知,连接刚度会随着外部载荷的增加而增加.式中:K为连接刚度;F为接触力;s为位移值.图7 作业工况位移云图Fig.7 Working conditions displacement cloud图8 暴风自存工况位移云图Fig.8 Storm self-existence condition displacement cloud3 结论1)在作业工况及暴风自存工况下船体与桩腿的连接刚度分别为79.398,82.445N/mm.2)对固桩架的研究,要综合考虑垂直载荷和水平载荷对固桩架力学性能的影响,研究结果表明:作业工况下,垂直载荷及水平载荷共同影响着固桩架的力学性能;暴风自存工况下,水平载荷对固桩架的力学性能有突出影响.3)考虑水平载荷时,要注重船体与风载荷的夹角因素,特别是当船体与风载荷的夹角为30°,90°时,风载荷对固桩架的力学性能有突出影响.4)通过对固桩架力学性能的研究,可以知道固桩架的最下处支架、导向边缘及相应的导向加强筋边缘是最容易发生屈服的区域.然而,在文中的研究过程中也存在着一些不足:水平载荷只考虑了风载荷;力学模型分析计算中,将桩腿和L型减速器抽象成刚性杠杆;固桩架的支架采用壳单元等.参考文献[1] The Society of Naval Architects and Marine Engineers.Technical and research bulletin 5-5A “Guidelines for site specific assessment of mobile jack-up units”[S].Jersey City,USA:The Society of Naval Architects and Marine Engineers,1994.[2] 中国船级社.海上移动平台入级与建造规范[S].北京:人民交通出版社,2005.[3] API RP 2A(WSD).Recommended practice for planning,designing and constructing fixed offshore platforms working stressdesign[S].Washton,USA:API Publications Programs and Services,2000. [4] 王钢,孟祥伟,彭曼,等.自升式平台支撑升降系统结构设计与分析[J].机械设计,2011,28(7):42-45.Wang Gang,Meng Xiangwei,Pang Man,et al.Design and analysis on fixation and jacking system of jack-up platform[J].Journal of MachineDesign,2011,28(7):42-45.(in Chinese)[5] 李红涛,徐捷,李晔.自升式海洋平台站立状态下的性能分析[J].中国海洋平台,2009,24(4):38-42.Li Hongtao,Xu Jie,Li Ye.Study on general performance of Jack-up under elevated condition[J].China Offshore Platform,2009,24(4):38-42.(in Chinese) [6] 陆晟.350 ft自升式平台站立工况总体分析[J].船舶设计通讯,2010,(125):71-75. Lu Sheng.Overall in place analysis of a 350 ft self-elevating drillingunit[J].Journal of Ship Design,2010,(125):71-75.(in Chinese)[7] 聂娅青,冯刚,韩文峰.自升式海洋平台固桩架结构的疲劳分析[J].制造业信息化,2009,(12):74-76.Nie Yaqing,Feng Gang,Han Wenfeng.Fatigue analysis of Jack-up platform jacking frame[J].Manufacturing Informatization,2009,(12):74-76.(in Chinese) [8] 谢丕元.基于ANSYS的海洋平台固桩架有限元分析研究[D].辽宁大连:大连理工大学,2009.[9] 史永晋,刘旭,赵泽茂.自存工况下自升式平台关键结构强度分析[J].石油矿场机械,2011,40(6):15-21.Shi Yongjin,Liu Xu,Zhao Zemao.Strength analysis of key structure for jack up platforms under storm survival conditions[J].Oil FieldEquipment,2011,40(6):15-21.(in Chinese)[10] 郭程新,黄一,李红霞,等.DSJ-300 自升式平台风暴环境生存能力[J].天津大学学报,2012,45(2):178-183.Guo Chengxin,Huang Yi,Li Hongxia,et al.Survivability of self-elevating drilling unit DSJ-300 in storm[J].Journal of TianjinUniversity,2012,45(2):178-183.(in Chinese)[11] 陈营营,黄一,李红霞,等.自升式钻井平台风暴自存状态性能分析研究[J].船海工程,2011,40(6):142-145.Chen Yingying,Huang Yi,Li Hongxia,et al.Study on general performance of Jack-up storm survival condition[J].Ship and OceanEngineering,2011,40(6):142-145.(in Chinese)[12] 金梦菊,甘进,吴卫国,等.自升式平台力学性能分析方法研究[J].船海工程,2011,40(6):162-164.Jin Mengju,Can Jin,Wu Weiguo,et al.Research on the mechanics performance analysis method of Jack-up[J].Ship and Ocean Engineering,2011,40(6):162-164.(in Chinese)[13] 潘斌.海洋自升式移动平台设计与研究[M].上海交通大学出版社,2008.[14] American Bureau of Shipping.Rules for building and classing mobile offshore drilling units,part 3:hull construction and equipment[S].Houston: American Bureau of Shipping,2008.。
自升式海洋平台桩腿强度及稳定性分析(1)

σb/MPa
164.909 156.011 37.866 174.737 155.798 40.124 131.496 146.097 35.974
σ/MPa
201.819 199.141 38.165 212.840 200.227 40.423 165.475 183.047 36.273
第十四届中国海洋(岸)工程学术讨论会论文集
147
自升式海洋平台桩腿强度及稳定性分析
蒙占彬,田海庆,Biblioteka 敦秋(胜利石油管理局 钻井工艺研究院,山东 东营 257061) 摘要:以国内某自升式钻井平台为例,并对利用有限元分析软件 ANSYS 对自升式海洋平台桩腿强度及稳定性分析的方法 进行介绍,提出了一种考虑桩腿齿条等构件作用的改进计算方法。 关键词:桩腿;强度;稳定性分析
表 3 自存工况作用力(90°)
构件 厚度/mm 50 艏桩 45 36 50 左艉桩 45 36 50 右艉桩 45 36 弯矩 My( / kN· m) 弯矩 M z / (kN· m) 2 324 1 692 373 1 305 950 209 1 143 742 163 60 809 51 789 9 736 64 467 51 737 10 322 56 828 48 518 9 255 轴力 Fx /kN 22 305 23 975 137 23 026 24 697 137 20 653 20 534 137
150
第十四届中国海洋(岸)工程学术讨论会论文集
3.2.3 计算结果 将表 1、表 2 及表 3 的数据代入式(6)进行计算,得到桩腿不同壁厚最危险单元的计算轴向应力 σa、 计算弯曲应力 σb 及计算组合应力 σ,如表 4 所示。
自升式海洋平台桩腿升降缓冲分析
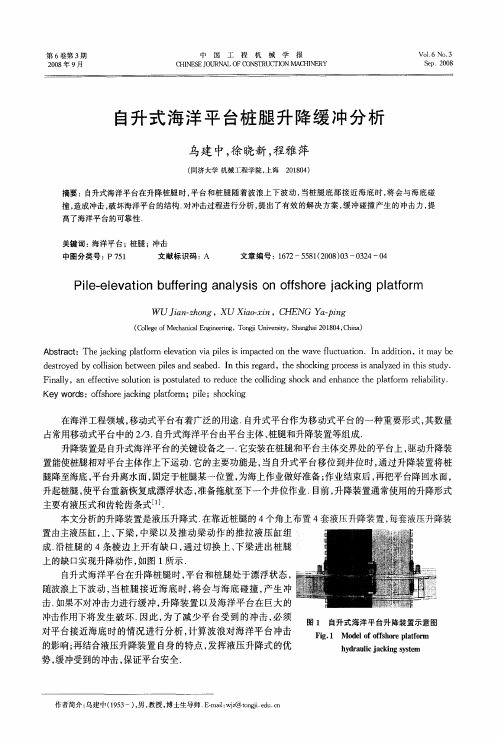
升起桩腿 , 使平台重新恢复成漂浮状态 , 准备拖航至下一个井位作业 . 目前 , 升降装置通常使用的升降形式 主要 有液压式和齿 轮齿条 式… .
本文分析的升降装置是液压升降式 . 在靠近桩腿的4 个角上布置 4 套液压升降装置 , 每套液压升降装 置由主液压缸, 、 上 下梁 , 中梁 以及推动梁动作的推拉液压缸组 成. 沿桩腿的 4条棱边上开有缺 口, 通过切换上 、 下梁进出桩腿 上的缺 口 实现升降动作 , 如图 1 所示. 自升 式海洋 平 台在升 降桩 腿 时 , 台和桩腿 处于漂 浮状态 , 平 随波浪上下波动 , 当桩腿接近海底时, 将会与海底碰撞 , 产生冲 击. 如果不对冲击力进行缓冲, 升降装置 以及海洋平台在巨大的 冲击作用下将发生破坏. 因此 , 了减少平 台受到的冲击, 为 必须 图 1 自升式海洋平台升降装置示意图 对平台接近海底时的情况进行 分析 , 计算波浪对海洋平 台冲击 F g 1 M o e fo fh r l to m i . d lo fs o e p a f r
第3 期
乌建 中, : 等 自升式海洋平台桩腿升降缓 冲分析
1 海 洋平 台升 降 过 程 运 动 分 析
漂浮于水面的物体在波浪作用下将产生 6 自由度的运动. 个 在船舶工程中, 已经把这些运动定名为纵 荡、 横荡 、 荡及横 摇 、 垂 纵摇 、 首摇 . 中 , 3个是 分别 沿坐标 轴方 向的平移 运动 , 3个是 绕船 的纵 轴 、 其 前 后 横
W U Ja —h n in z o g,XU Xiox n,C NG — i g a-i HE Yap n
( ol e f cai l nier g ogi ie i ,S a hi 0 8 4 C i ) C lg hnc gnei ,T n iUnvrt hn a2 10 ,hn e o Me aE n sy g a
自升式海洋平台桩腿调研

自升式海洋平台桩腿及相关技术背景和意义随着陆地油气资源开采力度的日渐加大和油气储量的不断减少,占全球资源总量34%的海洋石油资源已成为人们关注的焦点和新一轮油气勘探开发的热点。
2010-2014年海洋石油所占比例从35%提高至39%,深水石油产量所占比例将从7%提高到15%。
海洋石油需求增加带动海洋油气资本开支增加,2010-2014 年全球深水油气开发资本开支达1670亿元,比前5年增长37%。
其中海工装备目前每年500-600亿美金投资额,预计2015-2018 年将增至每年800亿美金。
[1]在开采海洋石油的海工装备中,海洋平台占有很重要的份额。
海洋平台主要指自升式海洋平台、半潜式海洋平台、钻井船及其他平台等。
对于保有量和手持订单来说,整个钻井装备中,自升式海洋平台保有量和手持订单最多,是全球保有量最大的海洋石油钻井装备,主要用在浅海。
自升式海洋平台的设计年限一般是 20 年,经过翻新之后,可再使用10年[1]。
到2014年,全球有多达 80%的自升式平台服役临近30年,其中一些已经无法翻新或有效地添加先进科技装备,必须由新的取代,自升式平台具有很大的潜在市场。
另外,世界商船运力的日趋饱和,面临着产能过剩等问题。
所以各船厂纷纷把眼光都投向这一领域,可想而知未来这一领域充满竞争。
自升式海洋平台领域中桩腿的建造,一直被视为最为基本、也最为重要的专题。
尤其是随着海洋开发活动由浅水发展到深水,桩腿面临的环境条件也越来越严酷,这又对自升式海洋平台的设计建造提出了更高的要求。
自升式海洋平台的组成自升式海洋平台主要由沉垫、桩腿、升降装置、平台(模块)等组成。
1、沉垫:自升式平台的沉垫要沉入海底,并以此为基础用传动机构使平台上升和下降。
故除在平台要移动工作地点时之外,该沉垫主要考虑的不是水动力特性,而是其沉入海底后的压强大小。
为此,自升式平台的沉垫一般设计成整块式,通常见到的以 A 字形居多,如图2.1所示。
自升式钻井平台桩腿锁紧齿条的有限元分析
软 件模 拟得 到 了锁 紧齿 条 各 个 齿 牙 的 裁 荷 分 布 规 律 , 同时 对 单 个 齿 牙不 同部 位 的 应 力情 况进 行 分 析 对 比 , 果 结 显 示理 论 结 果 和 仿 真 结 果 是 一 致 的 。
关 键 词 : 自升 式 钻 井 平 台 ; 紧齿 条 ; 限元 分 析 锁 有 中 图分 类 号 :TE 5 91 文 献 标 识 码 :A
( fh r lEn ie rn .,Lt , a j 0 4 1 Ofs o eOi g n e ig Co d Tini 3 O 5 ) n
Ab t a t Th s p p rs u y h o d n l c — a k o ef ee a i g m o i f s o e d i — sr c : i a e t d s t e l a s o o k r c fs l— l v tn b l o f h r rl e l i g p a f r wh n t e p a f r i l c e , B sn h o y a a y i n h i ie e e e t n lt o m e h l to m s o k d y u i g t e r n l ss a d t e f t l m n n me h d.t e d s rb t n o o d o h o k r c o t s f u d . to h it i u i f l a n t e l c — a k t o h i o n o An h n t e p p r a s d t e h a e lo s u y h t e s o if r n o i o i t e l c —a k t o h , h o ii n wh r h t e s i t d s t e s r s fd f e e tp st n O l h o k r c o t t e p s to e e t e s r s s i ma i a s f u d x m li o n .B o p r n h e u t ft e r n h i u a i n , h e u t s b l v — y c m a i g t e r s lso h o y a d t e sm l to t e r s l e i a i e
自升式平台迁移过程桩腿静态和动态强度分析的开题报告
自升式平台迁移过程桩腿静态和动态强度分析的开题报告一、题目自升式平台迁移过程桩腿静态和动态强度分析二、研究内容随着海洋深度加深和油气勘探的广泛开展,深海自升式平台(Semi-Submersible Platform)已经成为深海海洋结构中应用最广泛的一种。
在深海自升式平台的设计与建造过程中,桩腿是其中一个十分重要的部件,其静态和动态强度的分析与设计能否达到要求直接影响着整个平台的安全性和稳定性。
因此本文的研究内容主要分为以下两个方面:1.自升式平台迁移过程中桩腿的静态强度分析:对平台在移动过程中桩腿的受力情况进行分析,建立桩腿的受力模型,计算桩腿的静载荷和附加载荷,考察其对桩腿强度的影响,并对其进行优化设计。
2.自升式平台在工作状态下桩腿的动态强度分析:对平台在工作状态下桩腿的动态特性进行分析,确定其工作频率,建立动力学模型,考虑外力作用下桩腿的响应,计算桩腿的动态响应及动态强度,为其强度的优化设计提供理论基础。
三、研究意义深海自升式平台是海洋工程领域的重要组成部分,在深海石油勘探等领域有着较为广泛的应用,其结构设计的稳定性和强度是最为重要的考虑因素。
本文通过对自升式平台桩腿的静态强度和动态强度分析,可以提高自升式平台设计的科学性和准确性,优化结构设计,使得自升式平台的稳定性和强度得到有效保障,从而有助于提高深海石油勘探的效率和安全性。
四、研究方法本文采用数值计算方法和有限元方法,对自升式平台桩腿的静态受力分析和动态响应分析进行研究。
(1)静态受力分析:建立桩腿的受力分析模型,应用有限元法对其进行分析计算,考虑附加载荷的影响,确定桩腿的静态强度及其对附加载荷的承载能力,对其进行优化设计。
(2)动态响应分析:对自升式平台在工作状态下的桩腿进行动态响应分析,首先确定桩腿的固有频率,并建立其动力学模型,分析外力作用下的振动响应,计算桩腿的动态响应和强度,为其强度的优化设计提供基础。
五、预期结果通过数值计算和有限元分析,可以得到自升式平台迁移过程中桩腿的静态强度和在工作状态下的动态响应,优化自升式平台的结构设计,提高其稳定性和强度,确保其在海上应用的安全性和效率。
海上自升式平台电动升降装置的研究

海上自升式电动升降装置的研究自升式钻井、采油平台及试油作业平台都有升降装置,它的主要功能是,当自升式平台移位时,通过升降装置把平台升离水面,为海上作业做好准备,作业结束后,再把平台降回水面,升起桩脚,使平台重新恢复成漂浮状态,准备拖航至下一个井位作业。
据1955年至今的统计,在所有海上移动式平台中,自升式平台的事故占全部平台事故损失数量的75%。
分析证明了,自升式平台的事故有一半以上发生在拖航和升降平台的时候。
所以对自升式平台升降系统的设计是至关重要的。
1 升降系统的机构形式以三角型平台胜利作业一号为例,如图1所示,在每个角上均有一根三角形桁架型插入式电动单齿条桩腿。
升降装置的传动部分为齿轮齿条传动方式,它主要由固定在桩腿上的齿条及固定在船体上的升降船传动装置—小齿轮、减速箱、电动机和制动器所组成。
每根桩脚有3条齿条各对应有3套升降船装置,而每套传动装置由一台电动机、一台制动器、一台减速器、一台减速箱和一个小齿轮组成。
这样,每根桩腿由3X3传动装置,全平台有3根桩脚,共有27套电动升降船传动系统。
每套升降装置电动机的伸出端装有电磁圆盘式制动器,制动器的制动转矩不小于电动机额定转矩的2倍。
2 升降系统的同步性每根桩脚腿的3X3台电动机和制动器由同一电源,同一组正、反转接触器供电给9台 并联电动机和制动器,以保证每根桩脚的3套齿轮条传动装置的同步性。
如果3X3台电动机或制动器,由于接触器动作失灵、主触点接触不良或电缆断芯均会 破坏同步性造成整个传动装置的损坏,严重的将会损坏齿轮、齿条。
3 工作过程载荷分析升降系统各工况负荷状况可根据图2分析如下:第一工况(0~t1):时间约10min 。
平台开始从浮动状态升船,到平台离开水面为止, 一个小齿轮的受力情况是从空载逐渐加大,最后达到额定负荷,这种工况电动机和小齿轮承受一样负荷,平均值为(890+710+800)/3=800kN 。
第二工况(t1~t2):时间约12min 。
自升式钻井平台桩腿齿条磨损及裂纹的修补工艺探讨

石油工程建设2010年8月自升式钻井平台桩腿齿条磨损及裂纹的修补工艺探讨!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!"赵广景(中国船级社青岛分社海工处,山东青岛266400)摘要:胜利5号自升式钻井平台在特检和坞检时,经无损检测发现桩腿齿条和升降齿轮磨损极其严重,有208个齿磨损深度超过7mm ,占总齿数的25%,还有部分裂纹,已达报废程度,后经验船师与焊接工程师反复探讨、试验,制订了一套较为科学的焊接修复工艺,在施焊过程中,专人施焊,专人监督、检测,最终修复成功,恢复了桩腿的使用功能。
本工艺对今后钻井平台桩腿的维修,对高强度钢焊接具有一定的参考价值。
关键词:海上钻井平台;桩腿齿条;无损检测;缺陷;磨损;裂纹;焊接修复中图分类号:TE951文献标识码:A文章编号:1001-2206(2010)04-0012-031概述胜利5号钻井平台是胜利油田胜利海洋钻井公司所属的多个钻井平台之一,由美国贝克海洋公司设计,于1980年7月在大连造船厂建造,1990年9月该平台由ABS 船级转为CCS 船级,并于2000年5月进行了改造,至今已服役29年。
本次胜利5号钻井平台在烟台来福士船厂进行特别检验和坞修检验,由中国船级社(CCS )青岛分社海工处验船师负责驻厂检验,参与本项目测厚和无损检测的第三方检测公司为青岛太平洋海洋工程有限公司。
胜利5号钻井平台为自升式圆柱型钻井平台,平台设计外型尺寸为:39.62m ×30.48m ×4.11m ,设计作业水深为15.24~25.91m ,最大钻井深度6400m ,平台定员88人。
在近几年的年度检验中,验船师已多次发现该平台桩腿齿条和升降齿轮磨损严重,且部分齿条和33齿大齿轮存在严重挤压变形现象。
自升式海洋平台的桩腿强度及稳定性分析张强
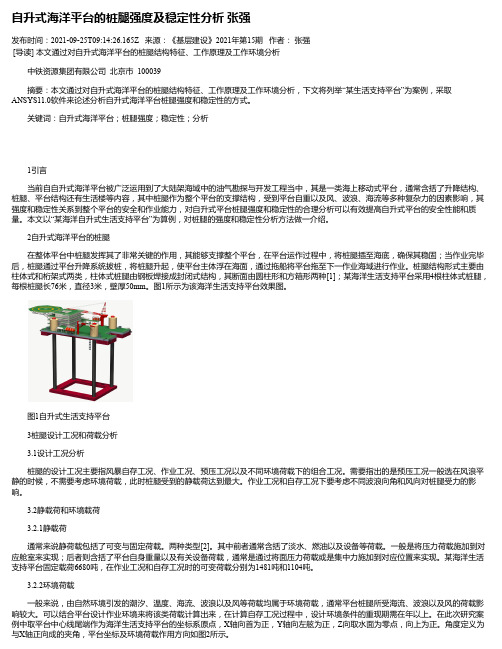
自升式海洋平台的桩腿强度及稳定性分析张强发布时间:2021-09-25T09:14:26.165Z 来源:《基层建设》2021年第15期作者:张强[导读] 本文通过对自升式海洋平台的桩腿结构特征、工作原理及工作环境分析中铁资源集团有限公司北京市 100039摘要:本文通过对自升式海洋平台的桩腿结构特征、工作原理及工作环境分析,下文将列举“某生活支持平台”为案例,采取ANSYS11.0软件来论述分析自升式海洋平台桩腿强度和稳定性的方式。
关键词:自升式海洋平台;桩腿强度;稳定性;分析1引言当前自自升式海洋平台被广泛运用到了大陆架海域中的油气勘探与开发工程当中,其是一类海上移动式平台,通常含括了升降结构、桩腿、平台结构还有生活楼等内容,其中桩腿作为整个平台的支撑结构,受到平台自重以及风、波浪、海流等多种复杂力的因素影响,其强度和稳定性关系到整个平台的安全和作业能力,对自升式平台桩腿强度和稳定性的合理分析可以有效提高自升式平台的安全性能和质量。
本文以“某海洋自升式生活支持平台”为算例,对桩腿的强度和稳定性分析方法做一介绍。
2自升式海洋平台的桩腿在整体平台中桩腿发挥其了非常关键的作用,其能够支撑整个平台,在平台运作过程中,将桩腿插至海底,确保其稳固;当作业完毕后,桩腿通过平台升降系统拔桩,将桩腿升起,使平台主体浮在海面,通过拖船将平台拖至下一作业海域进行作业。
桩腿结构形式主要由柱体式和桁架式两类,柱体式桩腿由钢板焊接成封闭式结构,其断面由圆柱形和方箱形两种[1];某海洋生活支持平台采用4根柱体式桩腿,每根桩腿长76米,直径3米,壁厚50mm。
图1所示为该海洋生活支持平台效果图。
图1自升式生活支持平台3桩腿设计工况和荷载分析3.1设计工况分析桩腿的设计工况主要指风暴自存工况、作业工况、预压工况以及不同环境荷载下的组合工况。
需要指出的是预压工况一般选在风浪平静的时候,不需要考虑环境荷载,此时桩腿受到的静载荷达到最大。
自升式海洋钻井平台升降系统齿轮齿条啮合接触分析

工业技术科技创新导报 Science and Technology Innovation Herald57渤海某自升式海洋钻井平台通过齿轮齿条升降装置进行升降调节,以适合不同工作海况水深。
齿轮齿条升降装置的工作是通过液压马达或电机驱动与齿条相对应的小齿轮,小齿轮沿齿条运动,实现平台的升降。
作为升降系统的主要承载力部件,齿轮齿条啮合处既需要在升降状态下完成桩腿及甲板的升降,还需要在正常工作状态及风暴自存状态下支撑船体甲板及相关设备,长时间处于承受重载的状态(包括动载荷)。
因此,齿轮齿条的应力分布和强度是关系到整个平台安全性能的一个重要因素[1-3]。
目前在海洋工程领域,关于自升式钻井平台齿轮齿条强度的校核,尚无较为明确的规范,一般认为对于这种低速、重载、开式齿轮齿条的强度校核,以齿根弯曲应力强度校核为主。
该文利用有限元分析软件作为工具,采用接触分析自升式钻井平台齿轮齿条强度校核进行探讨。
1 平台参数渤海某平台,平台主体结构为驳船型式。
平台有三根圆柱桩腿,内部设有环筋等骨材,每根直径2.74 m(9英尺),长56.7 m,平台承受载荷通过桩腿传递给桩靴。
每根桩腿设有两列齿条,成180度夹角,桩腿壁厚有1.5~2.5 inches不等。
桩腿材料采用高强度钢,型号为A B S D H36,屈服强度为51ksi (3587 kg/cm 2)。
平台单桩最大承载力为600KIPs (272.2 t/小齿轮),齿轮齿条具体数据如下:齿轮:3/16"pitch7齿渐开线齿面齿轮齿轮厚度:8.5"齿宽:8.3074"分度圆直径:37.833"齿轮材料:SAE4340 齿条:直线齿面齿条厚度:5"齿根深:5.333"齿顶高:5.177"齿条材料:AISI 87352 计算模型为了模拟齿轮齿条啮合机构,在建模时,需要定义齿轮、齿条接触面为接触对,在计算上属于非线性接触问题。
自升式海洋钻井平台升降系统的分析与研究

自升式海洋钻井平台升降系统的分析与研究作者:吴碧珺来源:《科技创新与应用》2015年第16期摘要:随着世界经济的飞速发展,海洋开发己经成为世界技术革新的重要内容,而海洋油气田的开发又是现今海洋资源开发利用的重中之重。
自升式海洋钻井平台是海洋油气勘探和开发的主要装备。
目前,国内使用的钻井平台中的控制系统基本都由国外制造,国内对其升降系统的分析相对较少。
所以,探讨和研究这一方面的内容意义深远。
关键词:自升式平台;升降系统;齿轮齿条式1 概述升降系统是自升式海洋钻井平台的关键部分。
其位置位于平台的主体和桩腿的交接处,作用是让桩腿和船体作相对的上下运动,从而使得平台主体能上下移动并将其固定在桩腿的某一位置。
根据升降系统结构形式的不同,一般可分为液压油缸式升降系统和齿轮齿条式升降系统。
液压油缸式的优点是:油缸的结构简单,力的传递直接,安全性高。
缺点是:桩腿升降框架的结构庞大,用钢量很大,操作的工序相对更复杂。
齿轮齿条式的优点是:升降运动连续性好,传动的速度快,可调速,受载均匀,操作简单,井位易对准。
缺点是:齿轮齿条的制作难度大,成本高,控制相对复杂。
由于海洋环境比较恶劣,平台升降所需要的时间对于平台的安全性就显得非常重要,同时运用齿轮齿条式升降平台可减少平台的就位费用,因此目前多采用此类系统。
2 齿轮齿条升降系统的设备组成齿轮齿条式升降系统通常由升降装置、升降框架、导向装置、桩腿以及电控系统组成。
升降装置一般由电动机、减速箱、制动器、小齿轮等组成,如图1所示。
电动机以前常用的是滑差式电机,后来变频技术越来越成熟,而且控制方便,于是逐渐取代了滑差式电动机。
减速箱一般由平行轴轮系和行星轮系两部分构成,速比很大,有的甚至上万。
制动器通常选择的是电磁圆盘式,其扭矩一般不小于1.2倍的暴风载荷。
小齿轮由高强度合金钢经特殊工艺加工而成,齿数一般为7齿,模数通常为80以上,目前世界上最大的小齿轮模数已经达到了110。
图1 齿轮齿条升降装置升降框架一般为封闭性环梁结构,如图2所示,它是连接升降装置和平台主体的框架,起承上启下的作用。
自升式钻井平台桩腿齿条接长工艺研究
27 7
( ) 前准 备:①S 10 8M 焊 条经 3 0C ̄4 0C烘烤 1 小 时,S7 1 . 焊条 经 3 0 4焊 一11. 5 ̄ 0 ̄ . 5 -0 6 0 2 ℃ ̄3 0C 5  ̄ 烘烤 1 小时后 放在 10 . 5 2 ℃~ 1 0 5 ℃的焊条 保温 筒 中 。 ② 清 除坡 口 内及坡 口边 缘两侧 各 2 mm 范 围的氧化 物 、水 、油 、锈 等对焊 接质 量有 影 响的杂质 。 0 ( )焊前 预热 。对 于低 碳调质 钢而 言 ,预热 的主要 目的是防止 裂纹 ,即 :以降低 马 氏体 转变 时的 5 冷却速 度 ,通 过 马 氏体 的“ 自回火” 的作用 ,来 提 高抗裂 性 能 。 当预热温 度过 高 时,由于 冷却速度 太慢 ,靠近 焊缝 处 金属 的奥 氏体可 能转变 为 含有 高碳 马 氏体 的
1 齿 条材料 的特 点及焊接 要点
11齿条材 料 的特点 . 齿 条为 自升式 钻井 平 台的关键 构件 ,它 承受平 台体升 、降时产 生 的载 荷 。齿条 焊接质 量 的优与 劣 以及 焊后 齿条 接缝 处 的齿间距 是否 符合 公差 要求 ,是保 证平 台 安全使用 的必要 条件 。 由于 齿条 是调 质钢 ,以及齿 条 的厚度大 ,刚性 大 ,拘束 度 大 ,即使 焊缝 中有 很小 的缺 陷 ,也会 形
自升 式钻 井平 台主要 通过 桩腿 与升 降机构 的有 效配 合实现 主 船体上 下 移动 , 从而 达 到根据 不 同水 深 , 自由升 降 的 目的。今 年来 ,国内船厂 承接 的 自升式钻 井平 台基 本 为三桩 腿桁 架式 结构 。桁 架式桩
腿 为 自升 式钻 井平 台主要 承载 结构单 元 ,为 保证 桩腿 结构 强度 要求 ,在 自升式 钻井平 台 设计建造 过程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Application of RPD to the Offshore Self-elevating Units
JIANG ~a-ningl, LI ~ o n ~ - t a o ~ (1. Tianjin Maritime Safety Administration, Kartjin 3002 11, China;
'PEElZig
SHIPBUILDING OF CHINA
W.51 Supplement l S i l (aa
No. 191)
Aug. 2010
# @ 3: $ft&7L$;
RPD; & & 1 % % ;
ftk WE##; BE%
A
8f )8 $ : U674.381
*fwsiiYo\E!:
-
dR&;fJ %#!!%%, &fin F&G 'L3 RPD JU-2000E P&EIBR RPD % 203rnrn[~]: GustoMSC a4 C 4 , J6 f $ffJ@RRPD % 5 ~ r n r n ~BMC375 ~&%%'T%~HF~!J%R%%~ ~~:
[6]
L Hongtao, YANG Qingxia, LI Ye. Study on general performance of jack-up under elevated condition[Jl. China Ocean I
Engineeaing, 2009,23(3): 577-584.
[I]
-4##, £&&. %A'P~%df)#7M.k@3riA~tllE&, 1992.
January 2002.
[2] SNAME. Guidelines for S i Specific Assessment of Mobile Jack-up Units[S]. Ttchnid & Research Bulletin 5-5 A,
2. Ofihore Engineering Plan Approval Center of CCS ,Tianjin 300457, China)
Abstract
The RPD represents the differential vertical displacement between each chord of one leg. The maximum allowable RPD is the value that should not be exceeded under jacking, pre-load jacking and pre-load holding conditions. Theory and method of RPD calculation are studied and suggested respectively in this paper. As an example, the maximum allowable RPD for a jack-up with truss legs is determined. This paper may be helpfi~l to he rig owners, operators and designers.
[3]
E.%. *##. $*fa#?% fiER%$[J].
m%%9%, 2007,22(6): 4-5.
[4] MSC.RPD design fix C 4 jack-up [EBIOL]. hm: J6
151 MSC. Overall Basic Design for Jsck-up[MJ. GustoMSC, 2007: 5 . 6
*ft%~%jzeT~~~-irt%%B~%BZ%~ #%e-+%%I"CBMB(InStbft%.Pe,%3PZ$ Ha*%, %Eft@fiW~E%T:)Fi!TSkW%i+ B, RPD RPD &84%%Bj2T2i!iRk9 ilifIE3 %%~3%-zmE9~M
.
RPD (Rack Phase Difference)
~X%%%8@Mm?ag#%%Rga#fl&%&#%&&@ilif?fiE
RPD = (b,
UC
-4,) +&o
I%kBBR3%B%GhS%fi, &I#MWB~%%%,W W ! J L B A ~ Z f i ~ + @ @ % f i S ~ EEBb < 1 > HJW@E~#G@KJ C o it-$$%%$US% e RPD 3 fi
K y words. Jack-up; RPD; truss leg; jacking; preload jacking; pre-load holding e