ENVI中自定义坐标系说明(精)
ENVI实验影像地理坐标定位和配准

ENVI实验2:影像地理坐标定位和配准主要介绍在ENVI中对影像进行地理校正,添加地理坐标,以及如何使用ENVI进行影像到影像的配准和影像到地图的校正。
一、ENVI中带地理坐标的影像ENVI对带地理坐标的影像提供了全面的支持,它能够对许多预定义的地图投影进行处理,这些地图投影可以采用UTM或State Plane投影方式。
此外,ENVI的用户自定义地图投影功能能够创建自定义的地图投影,它允许使用6种基本投影类型,超过35种的不同的椭球体以及100多种的基准数据集(Datum)来满足大多数地图投影的需要。
ENVI的地图投影参数存储在ASCII码文本文件Map_proj.txt中,该文本文件能够被ENVI地图投影工具修改,或者直接被用户编辑。
这个文件中的信息会被影像相应的头文件所使用,而且ENVI允许使用已知的地图投影坐标来简单地指定相Magic Pixel(地图坐标系统的起始点)。
然后,选择的ENVI函数就能够使用该信息,在带地理坐标的数据空间中进行操作处理。
ENVI的影像配准和几何纠正工具允许用户将基于像素的影像定位到地理坐标上,然后对它们进行几何纠正,使其匹配基准影像的几何信息。
使用全分辨率(主影像窗口)和缩放窗口来选择地面控制点(GCPs),进行影像到影像和影像到地图的配准。
基准影像和未校正影像的控制点坐标都会显示出来,同时由指定的校正算法所得的误差也会显示出来。
地面控制点预测功能能够使对地面控制点的选取简单化。
将使用重采样、缩放比例和平移(PST),以及多项式函数(多项式系数可以从1到n)或者Delaunay三角网的方法,来对影像进行校正。
所支持的重采样方法包括最近邻法(nearest-neighbor)、双线性内插法(bilinear interpolation)和三次卷积法(Cubic convolution)。
使用ENVI的多重动态链接功能对基准影像和校正后的影像进行比较,可以快速评估配准的精度。
在ENVI中添加beijing54坐标系

如何在ENVI里自定义高斯投影(北京54标)与转换投影baicai0114一.添加北京54坐标通过修改ENVI相应的系统文档,可以将北京54坐标系添加进ENVI软件系统,具体方法和步骤如下:1、找到ENVI安装目录下相应的坐标系存储文档,如“C:\RSI\IDL63\products\envi43\map_proj\datum.txt”,并打开。
2、将以下描述语句添加在文档最后一行:“Beijing-54, Krassovsky, -12, -113, -41”,其中“Beijing-54”是新坐标的名称;“Krassovsky”是它所使用的椭球体名称;“-12, -113, -41”是新坐标系与WGS-84坐标系的坐标差。
3、将修改后的文档保存,关闭。
4、重新启动ENVI。
新的坐标系添加成功。
二、自定义高斯-克吕格(Kauss Kruger)投影具体方法和步骤如下:1.选择Map> Customize Map Projection,或在任何地图投影选择对话框中,点击“New”按钮。
2、当出现Customized Map Projection Definition 对话框时,假设为定义高斯投影的13带,13带的中央经度为75度,具体设置参数如下(上图所示):Projection name :GK Zone 13(Beijing-54)Projection Type:Transverse MercatorProjection Datum:Beijing-54False easting:500000False northing:0Latitude of projection origin: 0Longitude of central meridian: 75Scale factor:13.选择Projection > Add New Projection将投影添加到ENVI 所用的投影列表中。
ENVI地图调整
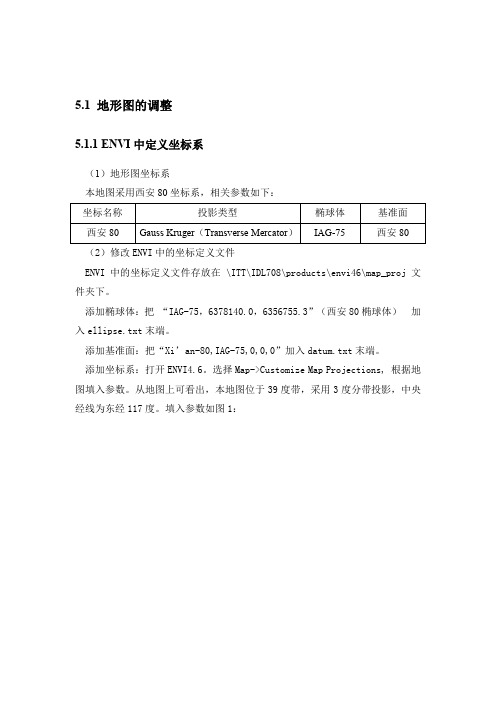
5.1 地形图的调整5.1.1 ENVI中定义坐标系(1)地形图坐标系本地图采用西安80坐标系,相关参数如下:(2)修改ENVI中的坐标定义文件ENVI中的坐标定义文件存放在 \ITT\IDL708\products\envi46\map_proj文件夹下。
添加椭球体:把“IAG-75,6378140.0,6356755.3”(西安80椭球体)加入ellipse.txt末端。
添加基准面:把“Xi’an-80,IAG-75,0,0,0”加入datum.txt末端。
添加坐标系:打开ENVI4.6。
选择Map->Customize Map Projections, 根据地图填入参数。
从地图上可看出,本地图位于39度带,采用3度分带投影,中央经线为东经117度。
填入参数如图1:图1 添加坐标系选择Projection -> Add New Projection,将投影添加到ENVI所有的投影中。
再选择File->Save Projections,保存添加好的投影。
(3)为地图添加Map Info打开地图3.tif。
选择Map->Registration->Select GCPs:Image To Map。
选择之前创建好的投影 Xi’an-80 3 Degree GK CM117E,并把X Pixel Size和Y Pixel Size改为1米。
单击OK。
在地图左上角选择一点,并输入这点经纬度,如图2。
图2 选点并输入该点坐标然后单击Add Point。
再重复上述选点方法选则2个点。
所选点坐标如图3。
图3 第二个点坐标图4 第三个点坐标选择Options->Warp File。
在弹出的窗口中选择3.tif,单击OK。
保存成新的文件,命名为3-1。
(4)调整地图地理坐标打开3-1.tif。
a.选择Overlay->Grid Line。
因为本图经度跨度3分45秒,维度跨度2分30秒,所以设置格网间隔1分15秒,使格网与地图四角经纬度数相一致。
ENVI基本影像处理流程操作ppt课件

1.1ENVI简介——立体像对高程提取扩展模块— DEM Extraction
• 快速从ALOS PRISM, ASTER, CARTOSAT-1, FORMOSAT-2,
GeoEye-1, IKONOS, KOMPSAT-2, OrbView-3, QuickBird, WorldView-1, SPOT 1-5等以及航空影像立体像对中提取 DEM。
3
1.快速认识ENVI
•1.1 ENVI简介 •1.2 安装目录结构 •1.3 栅格文件系统和储存 •1.4 数据输入 •1.5 数据显示 •1.6 常见系统设置
4
1.1ENVI简介——ENVI/IDL体系结构
扩展模块 主模块 开发语言
Atmospheric Correction
大气校正模 块
Feature Extraction
5
1 55 2 3-5 3
1.1-3.7 26 2-3
2每5天
其他卫星
传感器 Landsat1~7
发射时间 72~99
SPOT4
1999
中巴资源卫星-01/02 1999
13
1.3栅格文件系统和储存
• ENVI栅格文件格式:ENVI使用的是通用栅格数据格式,包含一
个简单的二进制文件( a simple flat binary )和一个相关 的ASCII(文本)的头文件。
–ENVI头文件包含用于读取图像数据文件的信息,它通常创建于一个数据文件第一次被 ENVI读取
时。单独的ENVI头文本文件提供关于图像尺寸、嵌入的头文件(若存在)、数据格式及其它相 关信息。所需信息通过交互式输入,或自动地用“文件吸取”创建,并且以后可以编辑修改。 您可以在ENVI之外使用一个文本编辑器生成一个ENVI头文件
ENVI基本操作之自定义坐标
IAG-75,6378140.0,6356755.3
影像预处理
分别是:基准面名称、 椭球名称、和三个参数。 都用半角豆号隔开。
影像预处理
这就是加进去 的椭球参数
影像预处理
• 第二步:定义基准面。 • 将基准面参数拷贝到datum.txt 文件夹中。 • 同样是半角豆号隔开。
附:北京54和西安80的基本面参数。 Beijing-54,Krasovsky,-12,-113,-41 Xi′an-80,IAG-75,0,0,0
影像预处理
• 第一步:定义椭球体。打开安装目录下
影像预处理
• 点开ellipse.txt,有三个参数:
椭球体名称
短半轴
长半轴
影像预处理
• 要增加椭球体和参数可直接在这个文件夹中
加上。这里要注意,名称和参数都是半角豆 号。
附:自定义投影参数。可选用 Krasovsky,6378245.0,6356863.0
选择已有的北 京54坐标基准 面
影像预处理
坐标偏移,这保证X 为正值,将中央经线 向东偏移500km 南偏为0 中央纬线为0
比例系数,0.9996 是个经验值。也可输 入1。
中央经线根据自己 的图幅位置而定
注意输入值后要回车以表示确定。
影像预处理
上述完成 后,将定 义的坐标 参数确定 下来。
影像预处理
ENVI基本操作之
自定义坐标
影像预处理
自定义坐标系
• 坐标系原理:地理坐标系是以经纬度为单位
的地球坐标系统,地理坐标系中有2个重要 部分,即地球椭球体(Spheroid)和大地基 准面(datum)。
大地基准面指目前参考椭球与WGS84参考椭球间 的相对位置关系(3个平移,3个旋转,1个缩 放),可以用其中3个、4个或者7个参数来描述 它们之间的关系,每个椭球体都对应一个或多 个大地基准面。
自定义坐标系(北京54、西安80、2000坐标系)
网址:
技术支持邮箱: ENVI-IDL@
电话: 010-57632288
技术支持热线: 400-819-2881-5
遥感事业部
1.2 国内坐标系介绍
先了解大地坐标的概念。大地坐标,在地面上建立一系列相连接的三角形,量取一段精确 的距离作为起算边,在这个边的两端点,采用天文观测的方法确定其点位(经度、纬度和方位 角) ,用精密测角仪器测定各三角形的角值,根据起算边的边长和点位,就可以推算出其他各点 的坐标。这样推算出的坐标,称为大地坐标。 我国 1954 年在北京设立了大地坐标原点, 由此计算出来的各大地控制点的坐标, 称为 1954 年北京坐标系。 为了适应大地测量的发展, 我国于 1978 年采用国际大地测量协会推荐的 IAG-75 地球椭球体建立了我国新的大地坐标系, 并在 1986 年宣布在陕西省泾阳县设立了新的大地坐标 原点,由此计算出来的各大地控制点坐标,称为 1980 年大地坐标系。随着社会的进步,国民经 济建设、国防建设和社会发展、科学研究等对国家大地坐标系提出了新的要求,迫切需要采用 原点位于地球质量中心的坐标系统作为国家大地坐标系。2000 国家大地坐标系(China Geodetic Coordinate System 2000,CGCS2000)是全球地心坐标系在我国的具体体现,其原点为包括海洋 和大气的整个地球的质量中心,CGCS2000 是我国当前最新的国家大地坐标系。 我们经常给影像投影时用到的北京 54、西安 80 和 2000 坐标系是投影直角坐标系,如下表 所示为国内坐标系采用的主要参数。从中可以看到我们通常称谓的北京 54 坐标系、西安 80 坐 标系实际上指的是我国的大地基准面。 表1.2 坐标名称 北京 54 西安 80 CGCS2000 投影类型 Gauss Kruger(Transverse Mercator) Gauss Kruger(Transverse Mercator) Gauss Kruger(Transverse Mercator) 北京 54、西安 80 和 2000 坐标系参数列表 椭球体 Krasovsky Xian_1980 CGCS2000 基准面 D_Beijing_1954 D_Xian_1980 D_China_2000
ENVI的二次开发
end
ENVI函数
• ENVI提供了大量处理函数供程序员使用,这些函数封装 了交互式ENVI程序所提供的绝大多数的功能。每个处理 程序都是IDL的程序或是函数,并可以被任何其它的IDL 程序所调用。可以通过ENVI的帮助Working with ENVI > ENVI Reference Guide -> ENVI Routines查看这些函 数的使用说明和例子。
\ITT\IDL70\BIN\BIN.X86 4. 我的电脑右键属性 高级→环境变量 →系统变量 path中添加;安装路径
\ITT\IDL70\BIN\BIN.X86 5. IDL_Win32Init(0,handle,NULL,0); IDL初始化 6. IDL_ExecuteStr(“restore,‘satstretch.sav’”); 执行IDL命令行 7. IDL_Cleanup(true);清除IDL
• 在ENVI任何用到投影坐标的功能模块中都可以新建坐标 系(在任何地图投影选择对话框中,点击“New”按钮。), 或者直接选择主菜单->Map->Customize Map Projection
坐标系定义练习
• 利用自定义坐标系将一幅北京54坐标系转化为西安80坐 标系。
• 试验的栅格数据情况为:一幅北京坐标系的栅格数据,投 影参数如下: 投影类型:Transverse Mercator 椭球:Krasovsky 基准面:Krasovsky(自定义) 中央经线:117 东向偏移:500000m
4.n = axIDLDrawWidget1.InitIDL((int)this.Handle); 初始化IDL控件
5.axIDLDrawWidget1.ExecuteStr(“”);执行IDL命令
ENVI基本影像处理流程操作
三维可视分析 制图输出 Geodatabase
Radar Lidar Thermal Terrain GPS Vector
雷达 激光雷达 热量数据 地形数据 位置数据 矢量数据
GIS分析
1.1ENVI简介——大气校正扩展模块(Atmospheric
• 自然要素
–河流, 湖泊,森林, 田地
• 云和雾
1.1ENVI简介——正射校正扩展模块——Orthorectification
• 由瑞典的Spacemetric公司开发 • 采用的正射校正方法具有可靠和高精度的特点,并且该方
法被行业所认可。
• 支持大区域范围内的多幅影像、多传感器的一次正射校正 • 具有镶嵌结果的功能,并提供接边线和颜色平衡辅助工具 • 采用流程化的向导式操作方式和工程化管理。 • 自定义传感器模型
Result to等。
1.4 数据显示
• 波段列表
–每次打开的文件都显示在Available Bands List中,列表中可以完成当前
在ENVI中打开的或存储在内存中的文件的信息,还可以进行包括:打开新 文件、关闭文件、将内存数据项保存到磁盘,以及编辑ENVI头文件等操作。
• 三视窗显示
–当你打开一个图像文件时,会在一个ENVI的三视窗图像显示中,其中包括
1.5 数据输入——特定数据的打开
• 对于特定的已知文件类型,利用内部或外部的头文件信息
通常会更加方便。使用 Open External File 选项,ENVI 能够读取一些标准文件类型的若干格式,理软件格式 及通用图像格式。ENVI 从内部头文件读取必要的参数,因 此不必在Header Information对话框中输入任何信息。
3-ENVI遥感图像预处理

• (3)单击Change
• (4)选择自定义北京54坐标系 • (5)回到Available
信息
ENVI/IDL
3.4 图像投影转换——投影转换
• (1)主菜单
> Map > Convert Map Projection
• (2)Convert
Map Projection对话框中,点击 Change Proj,打开Projection Selection对话 框
-
•
Image to Image几何校正
-
•
Image to Map几何校正
-
•
Image to Image自动图像配准
-
自动寻找同名点,可用于相同图像由于校正误差不重叠情况
主菜单->Map->Registration->Automatic Registration:Image to Image ENVI/IDL
ENVI/IDL
3.5 图像几何校正-Image to Map几何校正
• 采集控制点方式相比Image
to Image更加灵活,如 果控制点需要从不同途径收集或者直接从图上读取 后键盘输入,可以采取这种方法。如地形图校正。
• 第四步
利用GLT文件几何校正影像
• 选择:主菜单->Map->Georeference
from Input Geometry-> Georeference from GLT。在弹出对话框中 选择GLT文件和待校正文件,选择输出路径和文件名。
ENVI/IDL
3.5 图像几何校正-基于GLT的FY3几何校正
ENVI/IDL
3.5 图像几何校正-基于GLT的FY3几何校正
ENVI中自定义坐标系说明-16页文档资料
ENVI中自定义坐标系说明一般国外商业软件坐标系分为标准坐标系和自定义坐标系,由于我国的特殊情况,往往需要自定义坐标系。
北京五四坐标系、西安八零坐标系实际上指的是我国的两个大基准面。
主要参数如下:北京54:投影类型transverse mercator 椭球体是krasovsky ;西安80投影类型transverse mercator ,椭球体是IAG-75,。
ENVI中自定义这两种坐标系的步骤如下:(添加椭球体)记事本打开ellipse.txt,将krasovsky,6378245.0,6356863.0和AG-75,6378140.0,6356755.3加入ellipse.txt末端。
(添加基准面)记事本打开datum。
txt将D_BEIJING_1954,krasovsky,-12,-113,-41和D_Xian_1980,IAG-75,0,0,0加入末端。
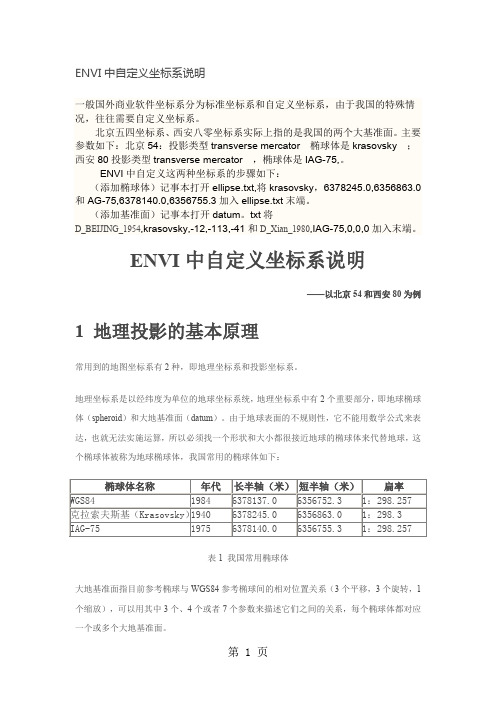
ENVI中自定义坐标系说明——以北京54和西安80为例1 地理投影的基本原理常用到的地图坐标系有2种,即地理坐标系和投影坐标系。
地理坐标系是以经纬度为单位的地球坐标系统,地理坐标系中有2个重要部分,即地球椭球体(spheroid)和大地基准面(datum)。
由于地球表面的不规则性,它不能用数学公式来表达,也就无法实施运算,所以必须找一个形状和大小都很接近地球的椭球体来代替地球,这个椭球体被称为地球椭球体,我国常用的椭球体如下:椭球体名称年代长半轴(米)短半轴(米)扁率WGS84 1984 6378137.0 6356752.3 1:298.257 克拉索夫斯基(Krasovsky)1940 6378245.0 6356863.0 1:298.3 IAG-75 1975 6378140.0 6356755.3 1:298.257表1 我国常用椭球体大地基准面指目前参考椭球与WGS84参考椭球间的相对位置关系(3个平移,3个旋转,1个缩放),可以用其中3个、4个或者7个参数来描述它们之间的关系,每个椭球体都对应一个或多个大地基准面。
(完整word版)ENVI遥感图像处理方法
《ENVI遥感图像处理方法》科学出版社2010年6月正式出版上一篇/ 下一篇 2010-05-26 15:02:30 / 个人分类:ENVI查看( 643 ) / 评论( 5 ) / 评分( 0 / 0 )从上个世纪六十年代E.L.Pruitt提出“遥感”这个词至今,遥感已经成为人类提供了从多维和宏观角度去认识宇宙世界的新方法与新手段。
目前,遥感影像日渐成为一种非常可靠、不可替代的空间数据源。
ENVI (The Environment for Visualizing Images)是由遥感领域的科学家采用交互式数据语言IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理软件。
ENVI以其强大的图像处理功能,尤其是与ArcGIS 一体化集成,使得众多的影像分析师和科学家选择ENVI来处理遥感图像和获得图像中的信息,从而全面提升了影像的价值。
ENVI已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等众多领域。
与此形成鲜明对比的是,目前关于ENVI 的中文教程非常少,给广大用户学习软件和应用软件带来诸多不便。
针对上述情况,在ESRI中国(北京)有限公司的大力支持下,根据多年遥感应用研究和软件操作经验,历时一年半编著完成本书。
全书按照遥感图像处理流程由浅到深逐步引导读者掌握ENVI软件操作。
各个章节相对独立,读者可视个人情况进行选择阅读。
全书分为17章,第1、2、3章介绍了ENVI软件的基础知识,可作为ENVI软件入门,也可作为参考内容;第4、5、6、7、8章介绍了遥感图像处理一般流程,包括图像几何校正、图像融合、图像镶嵌、图像裁剪、图像增强等预处理,图像分类、矢量处理、制图和三维可视化等图像基本处理,这5章又可独立阅读;第9、10、11、12章为专业操作,包括正射校正、面向对象图形特征提取、地形分析、遥感动态监测;第13、14章是光谱分析和高光谱处理方面的内容,包括辐射定标与大气校正、高光谱与光谱分析技术;第15章介绍了ENVI非常灵活的波段运算和波谱运算;第16章介绍了ENVI基本的雷达图像处理功能;第17章介绍了ENVI的二次开发功能。
ENVI中自定义坐标系说明(精)
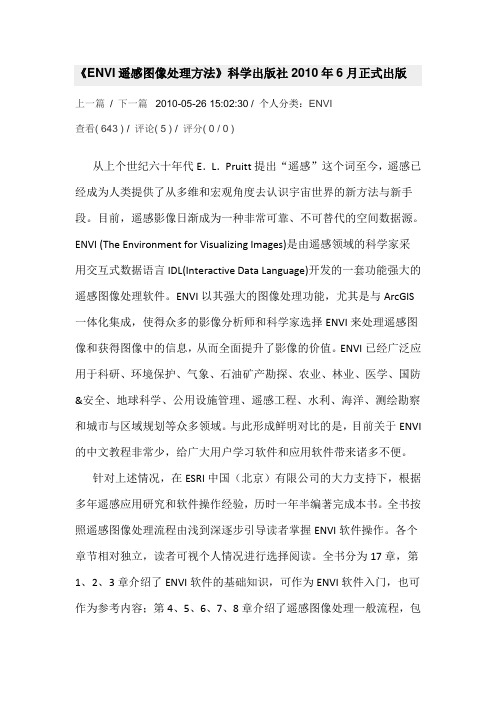
ENVI中自定义坐标系说明——以北京54和西安80为例摘要:ENVI中自定义坐标系说明——以北京54和西安80为例,ENVI中的坐标定义文件存放在HOME\ITT\IDL70\products\envi45\map_proj 文件夹下,三个文件记录了坐标信息:ellipse.txt 椭球体参数文件;datum.txt 基准面参数文件map_proj.txt 坐标系参数文件,在ENVI中自定义坐标系分三步:定义椭球体、基准面和定义坐标参数1 地理投影的基本原理常用到的地图坐标系有2种,即地理坐标系和投影坐标系。
地理坐标系是以经纬度为单位的地球坐标系统,地理坐标系中有2个重要部分,即地球椭球体(spheroid)和大地基准面(datum)。
由于地球表面的不规则性,它不能用数学公式来表达,也就无法实施运算,所以必须找一个形状和大小都很接近地球的椭球体来代替地球,这个椭球体被称为地球椭球体,我国常用的椭球体如下:椭球体名称年代长半轴(米)短半轴(米)扁率WGS84 1984 6378137.0 6356752.3 1:298.257克拉索夫斯基1940 6378245.0 6356863.0 1:298.3(Krasovsky)IAG-75 1975 6378140.0 6356755.3 1:298.257表1 我国常用椭球体大地基准面指目前参考椭球与WGS84参考椭球间的相对位置关系(3个平移,3个旋转,1个缩放),可以用其中3个、4个或者7个参数来描述它们之间的关系,每个椭球体都对应一个或多个大地基准面。
投影坐标系是利用一定的数学法则把地球表面上的经纬线网表示到平面上,属于平面坐标系。
数学法则指的是投影类型,目前我国普遍采用的是高斯——克吕格投影,在英美国家称为横轴墨卡托投影(Transverse Mercator)。
高斯克吕格投影的中央经线和赤道为互相垂直,分带标准分为3度带和6度带。
美国编制世界各地军用地图和地球资源卫星像片所采用的全球横轴墨卡托投影(UTM)是横轴墨卡托投影的一种变型。
ENVI 制图功能的简介

ENVI 制图功能的简介ENVI是遥感学应用中最重要的软件之一,它有非常强大的图形处理功能。
制图功能是ENVI较为基础的功能,它使得用户能够方便快捷地将一幅影像绘制成地图。
制图过程一般由以下几步组成。
先使用ENVI 快速制图(QuickMap)功能生成基本模板(或恢复原保存的模板),然后使用ENVI 的注记功能或其它影像叠合功能等按需要进行交互式地制图。
ENVI软件完全可以制作出较为标准的地质图,但要使图片效果更加优美,应多使用各类软件(如photo shop)来共同制作。
本文只介绍ENVI软件中快速制图的基本流程和各种标记方法。
本文概述本文旨在向用户介绍ENVI 地图制图的处理流程。
先用ENVI 新增的快速制图功能生成基本的的地图制图模板,再使用ENVI 的注记功能来添加额外的信息。
本文的制作步骤如下:本文内容(1)说明简要说明使用ENVI 的快速制图功能和在ENVI 中显示一幅影像一样简单,所需要做的就是生成或恢复一个基本地图模板,如果需要,再交互式地添加或修改个别的地图要素,如注记、比例尺、公里网等等。
地图制图的结果可以保存为一个ENVI 的显示组,需要时再进行恢复然后修改或是打印出来。
此外,ENVI的注记功能允许用户为共有的地图要素对象分别建立或保存模板。
1.2 本文中使用的文件灌阳地区.img 灌阳地区TM 比率影像(Subset)灌阳地区.hdr 灌阳地区相应的头文件(2)启动ENVI并打开影像文件启动ENVI启动前,请确认已正确安装ENVI。
要在Windows 系统中启动ENVI,请双击ENVI 的图标。
打开显示要打开的影像文件:a. 在ENVI 主菜单中,选择File →Open Image File。
b. 在出现的Enter Input Data File 文件选择对话框中,从列表中选“择灌阳区.img”文件,点击Open。
相应的文件和波段会列出在可用波段列表中。
根据默认设置选择3、2、1 的比率波段且同时选择了RGB Color 按钮。
ENVI遥感图像处理实验教程 实验二 坐标定义与投影转换ok

Krasovsky(0,0,0,0,0,0,0)基准面;西安 80 的 7 参数比较特殊,各个区域不一样。 一般有两个途径:一是直接从测绘部门获取;二是根据三个以上具有西安 80 坐标系 与其他坐标系的同名点坐标值,利用软件来推算,有一些绿色软件具有这个功能, 如 Coord MG。 中央经线获取可有以下两种方法,第一种根据已知带号计算,6 度带用 6*N-3,3 度带用 3*N;第二种方法是根据经度从图中查找。 地图比例尺:最简单的讲比例尺=图上距离/实地距离,对于一幅挂图就是纸张和 地图实际距离的比值。比例尺有大小之分,由于比例尺是个比值,分母越大,比例尺 也越小,单位必须一致;通常称 1:1000000、1:500000、1:200000 为小比例尺地形 图;1:100000、1:50000 和 1:25000 为中比例尺地形图;1:10000、1:5000、1: 2000、1:1000 和 1:500 为大比例尺地形图。我国规定 1:1 万、1:2.5 万、1:5 万、1:10 万、1:25 万、1:50 万比例尺地形图,均采用高斯克吕格投影。1:2.5 至 1:50 万比例尺地形图采用经差 6 度分带,1:1 和 1:2.5 万比例尺地形图采用经 差 3 度分带。
三、坐标定义
ENVI 中的坐标定义文件存放在 ITT\IDLxx\products\envixx \map_proj 文件夹下。 三个文件 记录了坐标信息: � � � ellipse.txt:椭球体参数文件。 datum.txt:基准面参数文件。 map_proj.txt:坐标系参数文件。
在 ENVI 中自定义坐标系分三步:定义椭球体、基准面和定义坐标参数。 1)定义椭球体 打开 ellipse.txt 文件, 语法为 <椭球体名称>, <长半轴>, <短半轴>。 这里将 “Krasovsky, 6378245.0, 6356863.0”和“IAG-75, 6378140.0, 6356755.3”加入 ellipse.txt 末端(图 2-1)。
envi中文说明

envi中文说明预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制e n v i3.5使用说明(t h a n k s s u p e r s of t)1.数据输入输出格式1.1数据输入格式通用图像格式TIFF,t f w(T I F F w o r l d file),G E O T I F F,J P E G,B M P,H D F/H D F1-D,P I C T,S R F,X W DN L A P S,P D S(P l a n e t a r y D a t a S y s t e m),MrSid 矢量格式A R C I n t e r c h a n g e F o r m a t(u n c o m p r e s s e d)A R C/In f o Images(.bil)A r c V i e w S h a p e (.s h p)A D R GA u t o C A D D X FD X FM a p I n f o(及相应的.mid文件的属性)M i c r o s t a t i o n .D G NU S G S S D T S&D L G遥感数据格式L a n d s a t T M:F a s t,G e o T I F,H D F,N L A P S,M R L C,A C R E S C C R S,E S A C E O SS P O T:S P O T,G e o S P O T,A C R E S SPOT,Veg e t a t i o nI K O N O S: G e o T I F F,N I T FI R S: F a s tA V H R R: K L M/L e v e l1b,S H A R P(E S A's A V H R R f o rm a t)S e a W I F S: Level 1B H D F,C E O S(E R S-1,E R S-2,J E R S-1)D M S P(N O A A)T h e r m a l:TIMS,M A S T E RR a d a r:R A D A R S A T,E R S ,J E R S,JPL T O P S A R&P O L S A R,SIR -C,A I R S A R(JPL)SIR-C/X-S A R S P O T(1A, 1B,2A,C A P) Military: AD R G,C A D R G,CIB,N I T FD i g i t a lE l e v a t i o n:D T E D,U S G S D E M ,U S G S S D T S D E MU S G S: D R G,D O Q,DEM,S D T S D E MMODIS S i m u l a t o r(M A S-50H D F)A V I R I S,C A S IA T S RC AD R GCIB其它遥感软件格式P C I (.p i x) FilesE R M a p p e rE R D A S7.5&IMAGINE8.X(包括其投影信息)其它数据格式A S C I IDMA D T E D&A D R GD M S PD O QE N V I/I D L C o m m a n d-line VariablesFlat B i n a r y FilesGeneric BIP,B I L,B S QNo P r o p r i e t a r y F o r m a t sO n-t h e-Fly D at a C o n v e r s i o n sU s e r-D e f i n a b l e D a t a F o r m a t sU S G S D E M &D O QU S G S S D T S D E M X,Y,Z A S C I I1.2数据输出格式ARC/INFO I m a g e s(.b i l)A r c V i e w S h a p e f i l e sASCII (R O I区可以ASCII输出)BMP(图像可以BMP格式输出,目前有24比特图和8比特灰度图两种)Direct O u t p u t t o P r i n t e r (先输出到P o s tscript格式上,则用户可进行大小/掩膜等设置)ERDAS 7.5(.l a n)E R M A P P E RG E O T I F FGIFP C I(.p i x)P I C TP o s tscript(可把掩膜输出到i m a g e或Postscript格式上)RGB F i l e sSRFT I F F(如有地理坐标信息,则可另输出成G e o T I F F文件或.t f w T I F F文件)X W D可在I D L命令行将E N V I的波段/文件/子集,及绘图窗口的显示数据输出成I D L变量E N V IMPEG(允许将3D曲面飞行动画序列输出为MPEG文件)N I T F02.00 (MIL-STD-2500A)或02.10 (MIL-STD-2500B)2.交互式分析2.1感兴趣区(R O I):可交互定义R O I:P o l y g o n s,P o l y l i n e s,P i x e l s允许多个R O I s合并成一个R O I可以将整个R O I区转换成点可将一幅图像里的R O I s通过地理座标转换到另一幅图像里可通过输入带有像元位置或地理坐标的ASCII文件来定义R O I ?可使图像中的R O I s和从地理坐标来定义的R O I s协调一致可用2-D散点图曲线或n-D散度分析器来定义R O I可用区域生长来定义R O I把ASCII文件转变成多边形R O I s,可将R O I s以ASCII文件输出在注记中采用T r u e T y p e字体作为注记的位置矢量图,能保持输出到P R I N T E R或POST script上(注:不会显示在输出的图像上)新增R O I类型——M u l t i Part,用户可实现“d o n u t”R O I s ?ROI分析功能增强:可以计算多个感兴趣区(R O I)的交集,并用计算结果定义新的R O I或进行掩膜2.2n-维散度可视化分析:给散点窗口中的一类或几类散点增加不同的符号可以显示和输出任意散点或类的光谱曲线,很容易地勾圈,编辑,分离各类可视化分析的每一步都可以前进或后退,分析速度可控制可将外边的光谱曲线读入n-维分析空间和图形窗口类控制对话框可报告每类里包含的散点数,可显示或关闭每一类或每几类检索到的统计结果和光谱曲线是来自文件的整个空间维,而不是参与n-D分析的子空间维(子空间维是整个空间维的一个字集)可将可视化分析窗口与光谱分析工具(S p e c t r a l A n a l y s t)连结起来以便对可视化分析窗口中的光谱曲线和标准光谱库作比较改进的N-D散度分析功能:可用预分类结果进行N-D散度分析,交互式地进行感兴趣区的细化。
北京54西安80与WGS84坐标相互转换设置ENVI参数[1]
![北京54西安80与WGS84坐标相互转换设置ENVI参数[1]](https://img.taocdn.com/s3/m/243b5723effdc8d376eeaeaad1f34693daef1065.png)
1.椭球体、基准面及地图投影GI S中的坐标系定义是GIS系统的基础,正确定义GIS系统的坐标系非常重要。
GIS中的坐标系定义由基准面和地图投影两组参数确定,而基准面的定义则由特定椭球体及其对应的转换参数确定,因此欲正确定义GIS系统坐标系,首先必须弄清地球椭球体(Ellipsoid)、大地基准面(Datum)及地图投影(Projection)三者的基本概念及它们之间的关系。
基准面是利用特定椭球体对特定地区地球表面的逼近,因此每个国家或地区均有各自的基准面,我们通常称谓的北京54坐标系、西安80坐标系实际上指的是我国的两个大地基准面。
我国参照前苏联从1953年起采用克拉索夫斯基(Krassovsky)椭球体建立了我国的北京54坐标系,1978年采用国际大地测量协会推荐的1975地球椭球体建立了我国新的大地坐标系--西安80坐标系,目前大地测量基本上仍以北京54坐标系作为参照,北京54与西安80坐标之间的转换可查阅国家测绘局公布的对照表。
WGS1984基准面采用WGS84椭球体,它是一地心坐标系,即以地心作为椭球体中心,目前GPS测量数据多以WGS1984为基准。
上述3个椭球体参数如下:椭球体与基准面之间的关系是一对多的关系,也就是基准面是在椭球体基础上建立的,但椭球体不能代表基准面,同样的椭球体能定义不同的基准面,如前苏联的Pulkovo 1942、非洲索马里的Afgooye基准面都采用了Krassovsky椭球体,但它们的基准面显然是不同的。
地图投影是将地图从球面转换到平面的数学变换,如果有人说:该点北京54坐标值为X=4231898,Y=21655933,实际上指的是北京54基准面下的投影坐标,也就是北京54基准面下的经纬度坐标在直角平面坐标上的投影结果。
2. GIS中基准面的定义与转换虽然现有GIS平台中都预定义有上百个基准面供用户选用,但均没有我们国家的基准面定义。
假如精度要求不高,可利用前苏联的Pulkovo 1942基准面(Mapinfo中代号为1001)代替北京54坐标系;假如精度要求较高,如土地利用、海域使用、城市基建等GIS系统,则需要自定义基准面。
与地图投影有关的软件使用说明(ENVI)

与地图投影有关的软件使用说明1.建立自定义的地图投影菜单位置:Map——Customized Map ProjectionENVI 软件中包含了一些标准的地图投影(记录在文件"map_proj.txt"中,该文件一般在map_proj子目录下,例如Universal Transverse Mercator (UTM和高斯克吕格投影。
通过这一菜单命令,用户不仅利用已知的投影,而且可以建立自定义的投影。
一般情况下,需要输入的投影参数包括:a投影类型(Transverse Mercator, Lamberts Conformal Conic, Lambert Azimuthal EqualArea, Oblique Mercator (A and B, Stereographic, Albers Equal Area, and Polyconic;b椭球体及其参数(Ellipsoid, Datum,主要是长半轴和短半轴。
c经度和纬度方向上的偏置(False Easting and Northingd起始纬度e中央经线f放缩比例因子等注意:这个对话框根据用户选择的投影类型不同,具有不同的内容。
如要了解地图投影更加详尽的信息,请访问以下INTERNET站点/depts/grg/gcraft/notes/datum/datum.html/jbanta/根据已有投影的修改是一个比较常用的方法。
首先装载标准投影,对话框的菜单命令Projection >Load existing project,该投影的参数自动出现在编辑框中,用户可以根据自己的需要修改这些参数。
包括输入“投影名称”等。
需要注意的是,不同地图投影所需要的参数是不同的。
ENVI 软件会根据投影的类别,自动显示和隐藏参数的编辑框。
例如横轴墨卡托投影的参数有中央经线、基准经线等;用户自定义椭球体时,需要输入定义椭球体的长半轴和短半轴。
#ENVI中自定义坐标系
ENVI中自定义坐标系说明——以北京54和西安80为例1 地理投影的基本原理常用到的地图坐标系有2种,即地理坐标系和投影坐标系。
地理坐标系是以经纬度为单位的地球坐标系统,地理坐标系中有2个重要部分,即地球椭球体<spheroid)和大地基准面<datum)。
因为地球表面的不规则性,它不能用数学公式来表达,也就无法实行运算,所以必须找一个形状和大小都很接近地球的椭球体来代替地球,这个椭球体被称为地球椭球体,我国常用的椭球体如下:我国1954年在北京设立了大地坐标原点,由此计算出来的各大地控制点的坐标,称为1954年北京坐标系。
为了适应大地测量的发展,我国于1978年采用国际大地测量协会推荐的IAG-75地球椭球体建立了我国新的大地坐标系,并在1986年宣布在陕西省泾阳县设立了新的大地坐标原点,由此计算出来的各大地控制点坐标,称为1980年大地坐标系。
我们经常给影像投影时用到的北京54或者西安80坐标系是投影直角坐标系,如下表所示为北京54和西安80坐标系采用的主要参数,图1高斯——克吕格投影的分带4 ENVI中定义坐标ENVI中的坐标定义文件存放在HOME\ITT\IDL70\products\envi45\map_proj 文件夹下,三个文件记录了坐标信息:ellipse.txt 椭球体参数文件datum.txt 基准面参数文件map_proj.txt 坐标系参数文件在ENVI中自定义坐标系分三步:定义椭球体、基准面和定义坐标参数第一步、添加椭球体语法为 <椭球体名称>,<长半轴>,<短半轴>。
这里将“Krasovsky,6378245.0,6356863.0”和“IAG-75,6378140.0,6356755.3”加入ellipse.txt末端。
注:ellipse.txt文件中已经有了克拉索夫斯基椭球,因为翻译原因,这里的英文名称是Krassovsky,为了让其他软件平台识别,这里新建一个Krasovsky椭球体。
IDL开发专题-IDL下的坐标系及示例-ENVIIDL技术版-Esri中国社区...
IDL开发专题-IDL下的坐标系及⽰例-ENVIIDL技术版-Esri中国社区...资源共享] IDL开发专题-IDL下的坐标系及⽰例本帖最后由 lianyi_dyq 于 2009-12-23 11:27 编辑IDL下常⽤的坐标系有下⾯三种:%设备坐标体系(显⽰屏幕、打印机纸张)%规⼀化坐标体系%数据坐标体系⽆论采⽤任何的坐标系,显⽰对象的坐标都要统⼀到当前坐标范围内,只有统⼀了坐标才能正确的显⽰数据。
下⾯的例⼦源码说明了如何应⽤这三个坐标系。
截图01.jpg截图02.jpg截图03.jpgPRO test_idlcoord;oWindow = OBJ_NEW('IDLgrWindow', $retain =2, $DIMENSIONS = [800,400]);显⽰体系结构oView = OBJ_NEW('IDLgrView')shapeModel = OBJ_NEW('IDLgrModel')imageModel= OBJ_NEW('IDLgrModel')oTopModel= OBJ_NEW('IDLgrModel')oTopModel->add,[imageModel,shapeModel]oView->add,oTopModel;读取数据file = filepath( 'day.jpg', SUBDIRECTORY=['examples','data'] )READ_JPEG, file,imageData; Resize the image dataimageData = congrid(imageData,3,360,180)oImage = OBJ_NEW('IDLgrImage', $imageData)imageModel->add,oImage;读取⽮量⽂件shpFilename = filepath( 'shape\continents.shp', SUBDIRECTORY=['resource','maps'] )shapeFile = OBJ_NEW('IDLffShape', shpFileName)shapeFile->getproperty, N_Entities = nEntitiesFOR i=0, nEntities-1 DO BEGINentitie = shapeFile->getentity(i)IF PTR_VALID(entitie.parts) NE 0 THEN BEGINcuts = [*entitie.parts, entitie.n_vertices]FOR j=0, entitie.n_parts-1 DO BEGINtempLon = (*entitie.vertices)[0,cuts[j]:cuts[j+1] - 1]tempLat = (*entitie.vertices)[1,cuts[j]:cuts[j+1] - 1];转换到当前图像坐标下tempLon = (REFORM(tempLon) -(-180))tempLat = (REFORM(tempLat) -(-90));num = N_ELEMENTS(tempLon)polylines = LINDGEN(num+1)-1polylines[0] = numtempPlot = OBJ_NEW('IDLgrPolyline', $tempLon, $tempLat, $Polylines = polyLines , $Alpha_Channel = 1, $color = [255,0,0])shapeModel->add,tempPlotENDFORENDIFshapeFile->destroyentity, entitieENDFOR;; 图像坐标显⽰oView->setproperty, viewPlane_Rect = [0,0,800,400]oWindow->SetProperty, title ='图像坐标显⽰'oWindow->draw,oView;停顿两秒wait,2;归⼀化坐标显⽰;销毁原来的OBJ_DESTROY,oTopModel;建⽴新的shapeModel = OBJ_NEW('IDLgrModel')imageModel= OBJ_NEW('IDLgrModel')oTopModel= OBJ_NEW('IDLgrModel')oTopModel->add,[imageModel,shapeModel]oView->add,oTopModel;oImage = OBJ_NEW('IDLgrImage', $imageData)imageModel->add,oImage;获取当前图像对象的X、Y⽅向的范围oImage->getproperty, xRange = xRange,yRange = yRange;求出归⼀化系数xr = norm_coord(xRange);解析:xrange =[0,360],xr是两个参数,[-0.00000000 ,0.0027777778],通过设置该参数, ;那么转换后x⽅向的原数据坐标为xr[0]+xr[1]*xrange[0]= -0+0.002777*0 = 0; xr[0]+xr[1]*xRange[1]= -0+0.002777*360 =1; 可测试 Norm_Coord([-100,100]) = [0.500000 , 0.00500000];yr = norm_coord(yRange)oImage->setproperty, xCoord_conv = xr, $yCoord_conv = yr;shapeFile = OBJ_NEW('IDLffShape', shpFileName)shapeFile->getproperty, N_Entities = nEntitiesFOR i=0, nEntities-1 DO BEGINentitie = shapeFile->getentity(i)IF PTR_VALID(entitie.parts) NE 0 THEN BEGINcuts = [*entitie.parts, entitie.n_vertices]FOR j=0, entitie.n_parts-1 DO BEGINtempLon = (*entitie.vertices)[0,cuts:cuts[i+1] - 1]tempLat = (*entitie.vertices)[1,cuts[j]:cuts[j+1] - 1];;转换到归⼀化的坐标系下显⽰tempLon = FLOAT((REFORM(tempLon) -(-180))) /360. tempLat = FLOAT((REFORM(tempLat) -(-90)))/180.;num = N_ELEMENTS(tempLon)polylines = LINDGEN(num+1)-1polylines[0] = numtempPlot = OBJ_NEW('IDLgrPolyline', $tempLon, $tempLat, $Polylines = polyLines , $Alpha_Channel = 1, $color = [255,0,0])shapeModel->add,tempPlotENDFORENDIFshapeFile->destroyentity, entitieENDFOR;; 设置显⽰区域坐标oView->setproperty, viewPlane_Rect = [0,0,1,1]oWindow->SetProperty, title ='归⼀化坐标显⽰'oWindow->draw,oView;停顿两秒wait,2;地理坐标显⽰;销毁原来的OBJ_DESTROY,oTopModel;建⽴新的sMap = map_proj_init('Interrupted Goode'); 或⽤下⾯的投影; ;全球的“等距圆柱投影”; sMap = Map_Proj_Init('Equirectangular' , $; Limit = [-90,-180,90,180] , $; Center_Longitude = 0 )shapeModel = OBJ_NEW('IDLgrModel')imageModel= OBJ_NEW('IDLgrModel')oTopModel= OBJ_NEW('IDLgrModel')oTopModel->add,[imageModel,shapeModel]oView->add,oTopModel;;对图像进⾏纠正;red= REFORM(imageData[0,*,*])green= REFORM(imageData[1,*,*])blue= REFORM(imageData[2,*,*])red1 = map_proj_image( red, MAP_STRUCTURE=sMap, MASK=mask, $ UVRANGE=uvrange, XINDEX=xindex, YINDEX=yindex )green1 = map_proj_image( green, XINDEX=xindex, YINDEX=yindex )blue1 = map_proj_image( blue, XINDEX=xindex, YINDEX=yindex )imageData = BYTARR(4,360,180)imageData[0,*,*] = red1imageData[1,*,*] = greenimageData[2,*,*] = blue;设置掩膜imageData[3,*,*] = mask*255b;uRange = uvRange[2]-uvRange[0]vRange = uvRange[3]-uvRange[1]oImage = OBJ_NEW('IDLgrImage', $imageData, $BLEND_FUNCTION = [3, 4], $dimensions=[uRange,vRange], $ ;维数--⼤地坐标location=uvRange[0:1] ) ;位置--⼤地坐标imageModel->add,oImage; ;shapeFile = OBJ_NEW('IDLffShape', shpFileName)shapeFile->getproperty, N_Entities = nEntitiesFOR i=0, nEntities-1 DO BEGINentitie = shapeFile->getentity(i)IF PTR_VALID(entitie.parts) NE 0 THEN BEGINcuts = [*entitie.parts, entitie.n_vertices]FOR j=0, entitie.n_parts-1 DO BEGINtempLon = (*entitie.vertices)[0,cuts[j]:cuts[j+1] - 1]tempLat = (*entitie.vertices)[1,cuts[j]:cuts[j+1] - 1];;转换到m制坐标系下显⽰vert = MAP_PROJ_FORWARD([tempLon,tempLat], $Map_Structure = sMap, $Polylines = polyLines);tempPlot = OBJ_NEW('IDLgrPolyline', $vert[0,*], $vert[1,*], $Polylines = polyLines , $Alpha_Channel = 1, $color = [255,0,0])shapeModel->add,tempPlotENDFORENDIFshapeFile->destroyentity, entitieENDFOR;; 设置显⽰区域坐标oView->setproperty, viewPlane_Rect = [uvrange[0],uvrange[1],uRange,vRange] oWindow->SetProperty, title ='Interrupted Goode 投影下m制坐标显⽰'oWindow->draw,oView。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ENVI中自定义坐标系说明——以北京54和西安80为例
摘要:ENVI中自定义坐标系说明——以北京54和西安80为例,ENVI中的坐标定义文件存放在HOME\ITT\IDL70\products\envi45\map_proj 文件夹下,三个文件记录了坐标信息:ellipse.txt 椭球体参数文件;datum.txt 基准面参数文件map_proj.txt 坐标系参数文件,在ENVI中自定义坐标系分三步:定义椭球体、基准面和定义坐标参数
1 地理投影的基本原理
常用到的地图坐标系有2种,即地理坐标系和投影坐标系。
地理坐标系是以经纬度为单位的地球坐标系统,地理坐标系中有2个重要部分,即地球椭球体(spheroid)和大地基准面(datum)。
由于地球表面的不规则性,它不能用数学公式来表达,也就无法实施运算,所以必须找一个形状和大小都很接近地球的椭球体来代替地球,这个椭球体被称为地球椭球体,我国常用的椭球体如下:
椭球体名称年代长半轴(米)短半轴(米)扁率
WGS84 1984 6378137.0 6356752.3 1:298.257
克拉索夫斯基1940 6378245.0 6356863.0 1:298.3
(Krasovsky)
IAG-75 1975 6378140.0 6356755.3 1:298.257
表1 我国常用椭球体
大地基准面指目前参考椭球与WGS84参考椭球间的相对位置关系(3个平移,3个旋转,1个缩放),可以用其中3个、4个或者7个参数来描述它们之间的关系,每个椭球体都对应一个或多个大地基准面。
投影坐标系是利用一定的数学法则把地球表面上的经纬线网表示到平面上,属于平面坐标系。
数学法则指的是投影类型,目前我国普遍采用的是高斯——克吕格投影,在英美国家称为横轴墨卡托投影(Transverse Mercator)。
高斯克吕格投影的中央经线和赤道为互相垂直,分带标准分为3度带和6度带。
美国编制世界各地军用地图和地球资源卫星像片所采用的全球横轴墨卡托投影(UTM)是横轴墨卡托投影的一种变型。
高斯克吕格投影的中央经线长度比等于1,UTM投影规定中央经线长度比为0.9996。
我国规定1:1万、1:2.5万、1:5万、1:10万、1:25万、1:50万比例尺地形图,均采用高斯克吕格投影。
1:2.5至1:50万比例尺地形图采用经差6度分带,1:1和1:2.5万比例尺地形图采用经差3度分带。
2 北京54与西安80坐标系
先了解大地坐标的概念。
大地坐标,在地面上建立一系列相连接的三角形,量取一段精确的距离作为起算边,在这个边的两端点,采用天文观测的方法确定其点位(经度、纬度和方位角),用精密测角仪器测定各三角形的角值,根据起算边的边长和点位,就可以推算出其他各点的坐标。
这样推算出的坐标,称为大地坐标。
我国1954年在北京设立了大地坐标原点,由此计算出来的各大地控制点的坐标,称为1954年北京坐标系。
为了适应大地测量的发展,我国于1978年采用国际大地测量协会推荐的IAG-75地球椭球体建立了我国新的大地坐标系,并在1986年宣布在陕西省泾阳县设立了新的大地坐标原点,由此计算出来的各大地控制点坐标,称为1980年大地坐标系。
我们经常给影像投影时用到的北京54或者西安80坐标系是投影直角坐标系,如下表所示为北京54和西安80坐标系采用的主要参数,
坐标名称投影类型椭球体基准面
北京54Gauss Kruger(Transverse Mercator)Krasovsky 北京54
西安80Gauss Kruger(Transverse Mercator)IAG75 西安80
从中可以看到我们通常称谓的北京54坐标系、西安80坐标系实际上指的是我国的两个大地基准面。
3 参数的获取
对于地理坐标,只需要确定两个参数,即椭球体和大地基准面。
对于投影坐标,投影类型为Gauss Kruger(Transverse Mercator),除了确定椭球体和大地基准面外,还需要确定中央经线。
大地基准面的确定关键是确定7个参数(或者其中几个参数),北京54基准面可以用三个平移参数来确定,即“-12,-113,-41,0,0,0,0”,很多软件近似为Krasovsky(0,0,0,0,0,0,0)基准面;西安80的7参数比较特殊,各个区域不一样。
一般有两个途径:一是直接从测绘部门获取;二是根据三个以上具有西安80坐标系与其他坐标系的同名点坐标值,利用软件来推算,有一些绿色软件具有这个功能,如Coord MG。
中央经线获取可有以下两种方法,第一种根据已知带号计算,6度带用6*N-3,3度带用3*N;第二种方法是根据经度从图1中查找。
图1高斯——克吕格投影的分带
4 ENVI中定义坐标
ENVI中的坐标定义文件存放在HOME\ITT\IDL70\products\envi45\map_proj 文件夹下,三个文件记录了坐标信息:
ellipse.txt 椭球体参数文件
datum.txt 基准面参数文件
map_proj.txt 坐标系参数文件
在ENVI中自定义坐标系分三步:定义椭球体、基准面和定义坐标参数
第一步、添加椭球体
语法为<椭球体名称>,<长半轴>,<短半轴>。
这里将“Krasovsky,6378245.0,6356863.0”和“IAG-75,6378140.0,6356755.3”加入ellipse.txt末端。
注:ellipse.txt文件中已经有了克拉索夫斯基椭球,由于翻译原因,这里的英文名称是Krassovsky,为了让其他软件平台识别,这里新建一个Krasovsky椭球体。
第二步、添加基准面
语法为<基准面名称>,<椭球体名称>,<平移三参数>。
这里将“Beijing-54, Krasovsky, -12, -113, -41”和“Xi'an-80,IAG-75,0,0,0”加入datum.txt 末端。
注:有的时候为了与其他软件平台兼容,基准面的名称直接写成所用的椭球体名称。
第三步、定义坐标
在ENVI任何用到投影坐标的功能模块中都可以新建坐标系(在任何地图投影选择对话
框中,点击“New”按钮。
),这里我们选择Map->Customize Map Projection,如图1所示,将相应的参数添加,这里添加的参数如图1所示。
注:投影类型选择Transverse Mercator,Scale factor填写0.9996,与Gauss-Kruger等同。
False easting中如果把带号,即39500000,得到的坐标就带有带号。
图 2 自定义坐标系
选择Projection->Add New Projection,
将投影添加到ENVI 所用的投影列表中。
选择File > Save Projections,存储新的或更改过的投影信息。
这样一个新的投影坐标就新建完成。
打开map_proj.txt,可以看到新建的坐标信息已经自动加入。
图3 自定义坐标列表
5 使用自定义坐标系
下面将利用自定义坐标系将一副北京54坐标系转化为西安80坐标系。
试验的栅格数据情况为:一幅北京坐标系的栅格数据,投影参数如下:
投影类型:Transverse Mercator
椭球:Krassovsky
基准面:Krassovsky(自定义)
中央经线:117
东向偏移:500000m
由于数据的投影信息不是国际标准或者说其参数名称不是标准的,所以在ENVI中有可能不能读取数据的投影信息(如图4),这个时候就需要重新设定投影信息。
图4查看坐标信息
打开数据文件,在Available Bands List中选择文件,点击右键打开Header Info,在Edit Attributes中选择Map Info。
选择Change Projection,将前面定义好的坐标选上。
图5添加坐标系
这样在影像的map info里面就可以看到投影信息了。
图6 更改坐标信息后的效果
选择Map->Convert Map Projecton,进行西安80的坐标转换。
图7 转换参数
打开转换后的结果,如图8所示,可以看到Map Info中投影信息已经更新,起始点的坐标也不一样,有几米的差别,这也符合北京54和西安80存在百米范围内的系统误差。
图8 西安80坐标系
6 总结
由于国内坐标系的非国际标准,很多软件平台,特别是国外软需要自定义坐标系。
从上可以看到,ENVI的坐标定义还是比较简单,也非常灵活。