AVR复位
AVR第10讲复位熔丝位设置
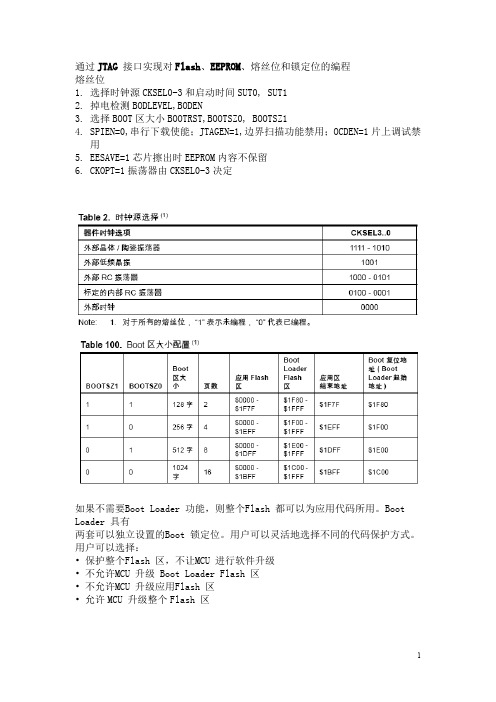
通过JTAG 接口实现对Flash、EEPROM、熔丝位和锁定位的编程熔丝位1.选择时钟源CKSEL0-3和启动时间SUT0, SUT12.掉电检测BODLEVEL,BODEN3.选择BOOT区大小BOOTRST,BOOTSZ0, BOOTSZ14.SPIEN=0,串行下载使能;JTAGEN=1,边界扫描功能禁用;OCDEN=1片上调试禁用5.EESAVE=1芯片擦出时EEPROM内容不保留6.CKOPT=1振荡器由CKSEL0-3决定如果不需要Boot Loader 功能,则整个Flash 都可以为应用代码所用。
Boot Loader 具有两套可以独立设置的Boot 锁定位。
用户可以灵活地选择不同的代码保护方式。
用户可以选择:• 保护整个Flash 区,不让MCU 进行软件升级• 不允许MCU 升级 Boot Loader Flash 区• 不允许MCU 升级应用Flash 区• 允许MCU 升级整个Flash 区ATmega16 有两个熔丝位字节。
Notes: 1. 在SPI 串行编程模式下SPIEN 熔丝位不可访问。
2. CKOPT 熔丝位功能由CKSEL 位设置决定,详见P23 “ 时钟源” 。
3. BOOTSZ1..0 默认值为最大Boot 大小,详见 P244Table 100。
4. 不论锁位与JTAGEN熔丝位设置为什么,产品出厂时不对OCDEN编程。
对OCDEN 熔丝位编程后会使能系统时钟的某些部分在所有的休眠模式下运行。
这会增加功耗。
5. 如果没有连接JTAG 接口,应尽可能取消JTAGEN 熔丝位的编程状态,以消除存在于JTAG 接口之TDO 引脚的静态电流。
熔丝位的状态不受芯片擦除命令的影响。
如果锁定位1(LB1) 被编程则熔丝位被锁定。
在编程锁定位前先编程熔丝位。
ATmega16 提供了6 个锁定位,根据其被编程(“0”) 还是没有被编程(“1”) 的情况可以获得Table 104 列出的附加性能。
自制AVR高压并行编程器成功,可随意修改熔丝位,能恢复被配置为IO复位引脚
前阵子手上刚好有几片锁死了的M8,估计连RESET也被禁用了,这些芯片已经无法通过下载线来恢复了。
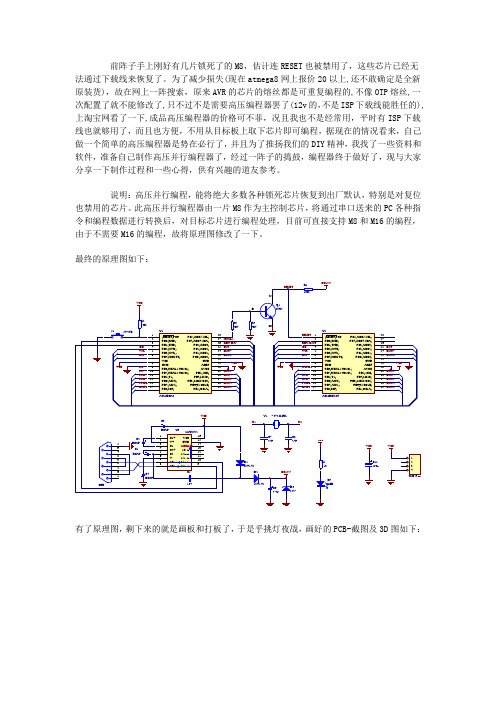
为了减少损失(现在atmega8网上报价20以上,还不敢确定是全新原装货),故在网上一阵搜索,原来AVR的芯片的熔丝都是可重复编程的,不像OTP熔丝,一次配置了就不能修改了,只不过不是需要高压编程器罢了(12v的,不是ISP下载线能胜任的),上淘宝网看了一下,成品高压编程器的价格可不菲,况且我也不是经常用,平时有ISP下载线也就够用了,而且也方便,不用从目标板上取下芯片即可编程,据现在的情况看来,自己做一个简单的高压编程器是势在必行了,并且为了推扬我们的DIY精神,我找了一些资料和软件,准备自己制作高压并行编程器了,经过一阵子的捣鼓,编程器终于做好了,现与大家分享一下制作过程和一些心得,供有兴趣的道友参考。
说明:高压并行编程,能将绝大多数各种锁死芯片恢复到出厂默认,特别是对复位也禁用的芯片。
此高压并行编程器由一片M8作为主控制芯片,将通过串口送来的PC各种指令和编程数据进行转换后,对目标芯片进行编程处理,目前可直接支持M8和M16的编程,由于不需要M16的编程,故将原理图修改了一下。
最终的原理图如下:有了原理图,剩下来的就是画板和打板了,于是乎挑灯夜战,画好的PCB-截图及3D图如下:然后呢,有两种方案,第一种是自己做板,用热转印的方法,缺点是比较费劲,因为本人没有打印机,另如果你愿意的话呢也可以用万用板搭,毕竟电路比较简单,第二种是发PCB 文件给专门做电路板的去做,缺点呢是要花RMB 啦,至于哪里找,淘宝上搜一下就有啦,我就是用的第二种方案,趋PCB还没回来的空闲把元件找齐,打样回来的PCB板如下:图片上的是4块拼在一起的,扮开来就是啦。
接下来就是焊元件啦,光说没用,动手是实际,先焊卧式和较矮的元件:再焊体积大的元件:完成后的效果如下:呵呵,看起来很小巧呢;不过这时的编程还不能工作的,因为它还没有“灵魂”,下面,我们就用之前做的ISP下载器拿过来,把编程器的“灵魂”注入到主控IC—M8当中,图片中带有USB口的是上次做的USB-ISP线,下面是临时搭的AVR最小系统板,第一步:连接好后,打开软件,配置好熔丝,如图:第二步:点击调入Flash,选择Hex文件所在的文件夹并打开;第三步;点击自动;Hex文件将被写入到单片机中.如图:进度条在显示烧写进度.写好后,把芯片取下插到刚才焊好的板子上,连接好后打开M8HVPRO软件,第一步,如果你的串口号不是默认的COM1则点击设置端口,设置与你串号相应的端口号,然后关闭重启即可;第三点:点击通迅检测,如果显示连接成功!那么恭喜你,你的高压编程器做好啦;如图:本文由天阳电子工作室原作,转载请注明出处,谢谢,如果你有什么好的建议或需技术帮助,请联系QQ476591173。
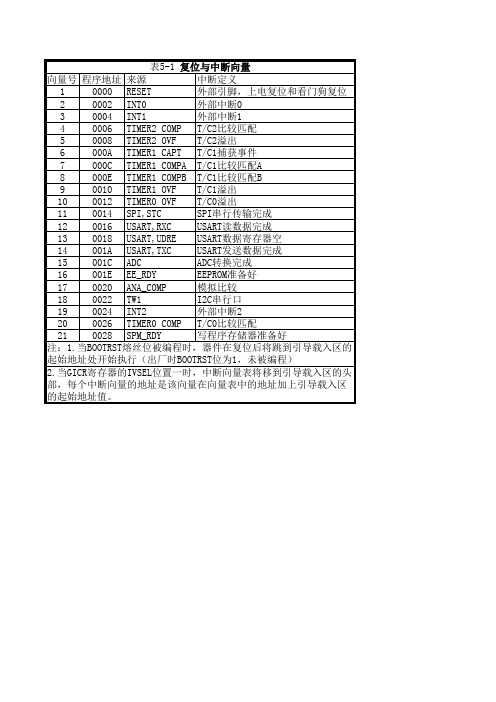
avr复位与中断向量表
ቤተ መጻሕፍቲ ባይዱ
Proteus环境下Avr I-O电平反复变化(看门狗复位)

Proteus 环境下Avr I/O 电平反复变化(看门狗复位)
学习了一个月的avr 单片机了,从点亮一个二极管到通信部分,以前都是
直接上硬件,下载验证,昨天开始下载了Proteus 使用仿真,下载地址是verycd/topics/2733851/ 发现点亮一个简单的二极管都不成功,cvavr 下的程序如下:#include
void main()
{
DDRB=0XFF;
PORTB=0X00;
while(1);
}
然而就是这么简单的一个程序得到的仿真结果是:
一会高一会低,非常郁闷,学了这么长时间,居然让一个灯常亮都不行了于
是群里问可惜没人回答
终于,搜索中找到了以下是原文:
这个问题主要会出现在用CVAVR 来编译的程序中。
之前学AVR 有用到proteus 仿真,我用的是proteus7.4,拿一个ATMega16 出来,用AVR 编译出来的一些简单的程序,根本不能正常的运行,这把我搞
的相当的郁闷,后
来在仿真日志中发现原来是看门狗一直都开着,我又没喂狗,因此一直都把
处理器复位了,这回我更郁闷,我又没开看门狗,又没配置fuse,为什么自己
会开呢,搞了N 久后,发。
AVR搞错熔丝位,导致芯片死锁的恢复办法
搞错熔丝位,导致芯片死锁的恢复办法说明:本贴仅具一般的参考性。
请有这方面的高手指正及投稿,让这个专题更加完整与专业。
当你改动了AVR的熔丝位配置,重新加电后,想再用ISP下载,提示:“进入编程模式失败”等,极有可能是你搞错了熔丝位,导致芯片不知道使用何种主频而无法正常工作(仅限于内部RC振荡的情况)。
解决方法为:1。
寄回给芯片服务商,让他们帮忙将芯片恢复这是最省事,但是最费时间,最无可奈何的方法。
2。
使用编程器将芯片恢复到出厂状态这个方法,需要你有编程器。
3。
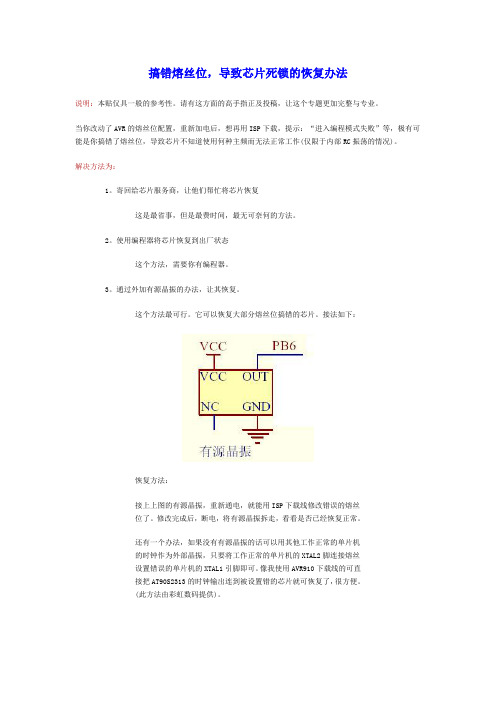
通过外加有源晶振的办法,让其恢复。
这个方法最可行。
它可以恢复大部分熔丝位搞错的芯片。
接法如下:恢复方法:接上上图的有源晶振,重新通电,就能用ISP下载线修改错误的熔丝位了。
修改完成后,断电,将有源晶振拆走,看看是否已经恢复正常。
还有一个办法,如果没有有源晶振的话可以用其他工作正常的单片机的时钟作为外部晶振,只要将工作正常的单片机的XTAL2脚连接熔丝设置错误的单片机的XTAL1引脚即可。
像我使用AVR910下载线的可直接把AT90S2313的时钟输出连到被设置错的芯片就可恢复了,很方便。
(此方法由彩虹数码提供)。
后记与补充 (2004-10-27) :本网站会员彩虹数码提供了在炜煌系列编程器改熔丝位恢复芯片的办法。
这几天随着被锁定的芯片越来越多,手头已经没有可以用的芯片了,实在没办法就又把以前购买的炜煌500A并行编程器拿出来研究。
因为以前一直没有发现该编程器有改AVR配置熔丝的选项(如下图),所以原本不太抱希望的。
在500A烧片程序中选择了M16芯片之后,弹出来了这样一个对话框,以前我都是看AVR-2适配器如何接线的,重来没有关注过下图红框框住的这几个字眼。
经过仔细研读,忽然想起SLISP中的配置熔丝界面也有高低字节位,于是赶紧打开来看看,果然如此,且高低位和扩展位分别对应不同功能的熔丝,如下图:终于理解了所谓的熔丝原来就是3个字节的存储器,不同的数值代表了不同的功能设置,所以炜煌系列编程器只要在数据缓冲区把熔丝地址(不同芯片的熔丝地址会不同)的数据手工修改,然后写入即可,如下图:附录一:小资料:晶体、晶振和有源晶振晶体(crystal)就是以特定方式(AT或BT等)切割的水晶(天然或人造石英),利用水晶具有的压电效应来做频率基准。
单片机的复位方式

单片机的复位方式单片机是一种嵌入式系统中常用的芯片,它具有微处理器、存储器和各种输入输出接口等基本功能。
在单片机的运行过程中,复位是一个非常重要的环节,它可以使单片机恢复到初始状态,以便重新开始工作。
本文将介绍单片机的三种常见复位方式:电源复位、外部复位和软件复位,并对它们的特点和应用进行详细的阐述。
一、电源复位电源复位是最常见的一种复位方式。
当单片机的电源电压下降到一定程度时,复位电路会自动将单片机复位。
电源复位的特点是简单可靠,无需外部干预,适用于大多数应用场景。
然而,电源复位的缺点是无法在单片机工作过程中手动触发,对于某些特殊应用来说可能不够灵活。
二、外部复位外部复位是通过外部信号来触发的一种复位方式。
在单片机的复位引脚上接入一个复位信号,当该信号发生变化时,单片机就会被复位。
外部复位的特点是可以手动触发,可以在单片机工作过程中进行复位操作。
这种方式适用于一些对复位时机要求较高的应用,比如故障处理和系统调试等。
三、软件复位软件复位是通过特定的指令来触发的一种复位方式。
单片机内部有一个特殊的寄存器,当该寄存器被写入特定的值时,单片机就会执行软件复位操作。
软件复位的特点是可以在程序中灵活控制复位的时机和条件,适用于一些需要动态控制复位的应用。
然而,软件复位也有一个缺点,就是需要在程序中添加特定的指令,增加了程序的复杂度和开发难度。
单片机的复位方式有电源复位、外部复位和软件复位三种。
它们各有特点和应用场景,开发者可以根据具体的需求选择合适的复位方式。
在实际应用中,通常会根据系统的要求来选择复位方式,并结合其他控制策略来实现复位功能。
无论是哪种复位方式,都需要注意复位时机和条件的设置,以确保单片机能够正常工作。
在设计单片机系统时,复位是一个非常重要的考虑因素。
恰当地选择和使用复位方式可以提高系统的可靠性和稳定性。
同时,还需要注意复位电路的设计和布局,以确保复位信号的稳定和可靠性。
在实际应用中,还可以采用多种复位方式的组合,以提高系统的可靠性和灵活性。
AVR单片机复习题答案
AVR单片机复习题(答案在后面)第一章填空:1.单片机的基本组成结构包括:、、、五大部分。
2.哈佛结构是指,计算机由五大部分构成,五大部分分别是:、、、3.ATmega16包含程序存储器,数据存储器和的EEPROM。
4.ATMEL公司生产的单片机以三大系列为主,分别是:、、5.ATMEL公司生产的TinyAVR是属于单片机。
、6.ATMEL公司生产的megaA VR是属于单片机。
7.ATMEL公司生产的XMEGA是属于单片机。
选择:1.ATMEL公司生产的单片机以三大系列为主,其中TinyAVR是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机2.ATMEL公司生产的单片机以三大系列为主,其中megaA VR是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机3.ATMEL公司生产的单片机以三大系列为主,其中XMEGA是属于()A、低档单片机B、中档单片机C、高档单片机D、普通单片机4. 单片机的基本组成结构包括:CPU、程序存储器、、输入接口、输出接口五大部分()A、EEPROMB、数据存储器C、ROMD、堆栈简答:1.什么是ISP技术?采用ISP技术的单片机有什么优点?2.什么是单片机?3.说明单片机的RAM、FLASH ROM、EEPROM的用途和特点?(中等)第二章填空:1.单片机的三总线结构是指:、、。
2.ATmega16包含FLASH ROM,RAM和的EEPROM。
3.FLASH ROM支持用户,可以实现的(填读写或写入)。
4.单片机的数据存储器包含和两大部分,其中是的补充。
5.ATmega16中含有的EEPROM。
它的擦写次数是,具有、。
6.ATmega16的DIP封装共有引脚,其中共有I/O 口线。
7.ATmega16的数据存储器中共有通用工作寄存器,有寄存器可以合并成为3个16位的寄存器。
8.在ATmega16的通用寄存器组中,有16位的寄存器。
AVR复位电路的设计
AVR复位电路的设计
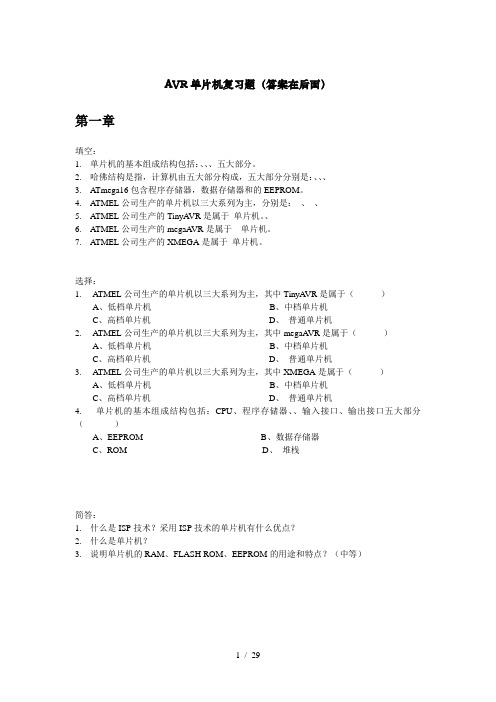
与传统的51单片机相比,AVR单片机内置复位电路,并且在熔丝位里,可以控制复位时间,所以,AVR单片机可以不设外部上电复位电路,依然可以正常复位,稳定工作。
若是系统需要设置按键复位电路,那么注意,AVR单片机是低电平复位,如下图,设计按键复位电路:
复位线路的设计
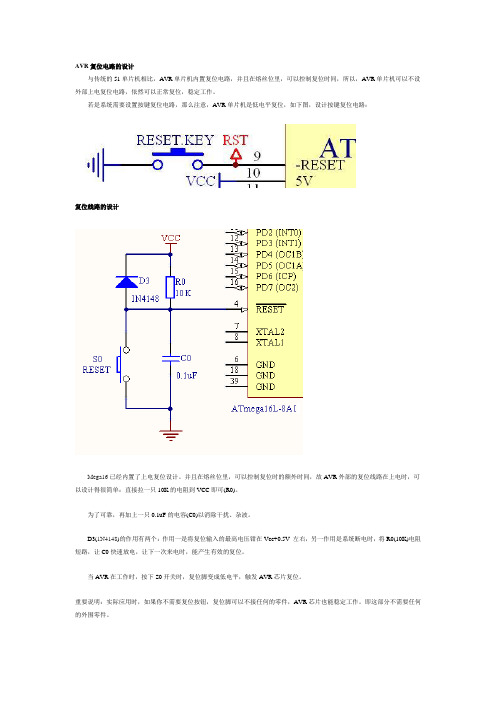
Mega16已经内置了上电复位设计。
并且在熔丝位里,可以控制复位时的额外时间,故AVR外部的复位线路在上电时,可以设计得很简单:直接拉一只10K的电阻到VCC即可(R0)。
为了可靠,再加上一只0.1uF的电容(C0)以消除干扰、杂波。
D3(1N4148)的作用有两个:作用一是将复位输入的最高电压钳在Vcc+0.5V 左右,另一作用是系统断电时,将R0(10K)电阻短路,让C0快速放电,让下一次来电时,能产生有效的复位。
当AVR在工作时,按下S0开关时,复位脚变成低电平,触发AVR芯片复位。
重要说明:实际应用时,如果你不需要复位按钮,复位脚可以不接任何的零件,AVR芯片也能稳定工作。
即这部分不需要任何的外围零件。
单片机的高电平复位与低电平复位
单片机的高电平复位与低电平复位
高电平复位:
(一般的51系列单片机采用电平复位)
原理可理解为:单片机一上电的瞬间,电容相当于短路,所以5V电压全部集中在4.7K电阻上,然后,电容开始充电,当充电到一定时候,5V电压基本都集中在电容上了,电阻上的电压低于单片机需要的高电平电压。
低电平复位:
(AVR,PIC等较高级单片机采用高电平复位)
原理可理解为:刚上电时,电容视为短路,RST脚相当于接地,然后电容开始充电,随着,电容电压不断升高,电阻电压不断下降,即RST引脚电压不断上升至变为高电平,复位结束。
另外,早期都是用低电平复位
复位结束以后,需要维持复位信号高电平,带来了功耗的问题,有一部分人用高电平复位
随着工作电压的降低,考虑到噪声的影响,又开始趋向于选择低电平。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
AVR的复位
AVR单片机的复位概述复位电路的基本功能:系统上电时提供复位信号直至系统电源稳定后撤销复位信号,为可靠起见,电源稳定后还要经一定的延时才撤销复位信号,以防电源开关或电源插头分-合过程中引起的抖动而影响复位复位简单的说就是将芯片内的PC计数器清零,工作寄存器恢复为初始值,程序从复位向量处开始执行.A.复位向量由复位FUSE来设置BOOTRST 复位地址1 复位向量= 应用区复位( 地址0x0000)0 复位向量=Boot Loader 复位B. IO寄存器包括通用IO寄存器(R0~R31)),特殊功能寄存器C.PC计数器相当于程序指针,里面的数据就是程序的绝对地址,一般它的位数决定芯片的程序的容量如: PC为8bit,则最大的程序容量为28=256条指令(空间大小根据改芯片的指令结构,单字节指令,双字节指令…指令=操作码+操作数).PC为16bit则最大的程序容量为216=64K条指令,由于A VR是双字节指令结构,所以flash的容量要求为128K,所以mega128是最大的MCU在复位向量处的指令,Mega168是绝对跳转JMP,Mega48/88是相对跳转RJMP.复位源有效时I/O 端口立即复位为初始值。
此时不要求任何时钟处于正常运行状态。
所有的复位信号消失之后,芯片内部的一个延迟计数器被激活,将内部复位的时间延长。
这种处理方式使得在MCU 正常工作之前有一定的时间让电源达到稳定的电平。
延迟计数器的溢出时间通过熔丝位SUT 与CKSEL 设定。
SUT1,SUT0决定启动时间,CKSEL3..0选择时钟源熔丝位的状态不受芯片擦除命令的影响。
如果锁定位1(LB1/LB2) 被编程则熔丝位被锁定。
在编程锁定位前先编程熔丝位。
A VR复位源上电复位。
当电源电压低于上电复位门限 VPOT 时, MCU 复位。
•• 外部复位。
当引脚 RESET 的低电平持续时间大于最小脉冲宽度时MCU 复位。
• 看门狗复位。
AVR单片机 看门狗范例 GCCAVR WDR 复位检测和控制看门狗

AVR单片机看门狗范例GCCAVR WDR 复位检测和控制看门狗内容来源:OURAVR发布时间:[2010-10-28]查看次数:805/*************************************************** AVR 复位检测和控制看门狗的范例******* ******* 作者:HJJourAVR ******* 编译器:WINAVR20050214 ******* ******* 2005.9.28 **************************************************//*本程序简单的示范了AVRATMEGA16的复位检测和控制看门狗系统控制和复位复位来源的检测JTAG复位指示看门狗复位指示BOD复位指示RESET引脚复位指示上电复位指示看门狗的控制出于简化程序考虑,各种数据没有对外输出,学习时建议使用JTAG ICE硬件仿真器。
熔丝位设置1 使能BOD功能BODEN=02 选择BOD电平BODLEVEL=1 2.7V(VCC=3V) (可选)BODLEVEL=0 4.0V(VCC=5V) (可选)*/#include <avr/io.h>#include <avr/delay.h>//时钟定为内部RC 1MHz,F_CPU=1000000 也可以采用其他时钟#include <avr/wdt.h>/*wdt.h里面看门狗溢出时间常量定义#define WDTO_15MS 0#define WDTO_30MS 1#define WDTO_60MS 2#define WDTO_120MS 3#define WDTO_250MS 4#define WDTO_500MS 5#define WDTO_1S 6#define WDTO_2S 7下面的4S/8S定义只能用于 ATtiny2313, ATmega48, ATmega88 and the ATmega168.#define WDTO_4S 8#define WDTO_8S 9看门狗操作函数wdt_disable()关闭看门狗wdt_enable(timeout)使能看门狗及溢出时间设定wdt_reset()复位看门狗(喂狗)*///管脚定义#define WDT_EN 7 //PA7 看门狗的喂狗控制引脚// 高电平,不喂狗// 低电平,喂狗#define LED_JT 4 //PA4 JTAG复位指示#define LED_WD 3 //PA3 看门狗复位指示#define LED_BO 2 //PA2 BOD复位指示#define LED_EXT 1 //PA1 RESET引脚复位指示#define LED_PO 0 //PA0 上电复位指示//以上信号皆为低电平有效int main(void){unsigned char CPU_STATUS;unsigned char i;//上电默认DDRx=0x00,PORTx=0x00 输入,无上拉电阻PORTB=0xFF;//不用的管脚使能内部上拉电阻。
AVR的操作步骤和应用

动手学A VR单片机一、AVR单片机家族概述1.1 AVR单片机家族单片机概述AVR单片机系列齐全,可适用于各种不同场合的要求。
AVR单片机主要包括ATTINY、AT90、ATME GA这三大系列。
低档Tiny系列AVR单片机: 主要有Tiny11/12/13/15/26/28等;ATTINY系列最简单、功能最弱。
适用于比较低档的玩具、仪器仪表和简单的控制系统。
中档AT90S系列AVR 单片机: 主要有AT90S1200/2313/8515/8535等;目前AT90系列正在停产或转型到Mega系列。
高档ATmega系列AVR单片机: 主要有两个系列:ATmega8/16/32/64/128系列(存储容量为8/16/32/ 64/128 KB)、ATmega48/88/168系列。
ATmega系列使用了更加先进、可靠的制造工艺,高中低档齐全,正在逐步取代AT90系列的产品。
AVR单片机还根据不同的应用推出了各具特色的单片机:如汽车类AVR、CAN总线AVR、智能电池A VR、LCD(液晶显示)AVR、USB总线AVR、灯光专用AVR、Z-Link AVR、微型AVR等9大类型,这些单片机几乎涵盖了8位单片机的所有应用领域。
1.2 AVR单片机的型号与编号AVR单片机型号众多,基本上每种型号都有不同用途,每个系列AVR单片机芯片上都有不同的编号;如何根据芯片上的编号来识别呢?我们以下面这个编号为例来进行说明:ATmega8L-8PI1.AT表示该单片机是ATMEL公司的产品;2.mega表示该单片机为ATmega系列的单片机;3.数字8表示mega系列型号为8的单片机,同时指名了该型号单片机内部flash容量位8KB(8K字节)。
4.字母L表示该单片机为低功耗类型的单片机,同理如果没有L,则表示该单片机为普通类型的单片机;5.“-”后面的数字8表示该芯片允许的最大时钟频率为8MHz,如果是16则表示允许最大时钟频率为16M Hz;6.字母P表示该单片机的封装形式,P是DIP封装(双列直插),A表示有引脚扁平封装(即贴片封装),M表示无引脚扁平封装(对于个人学习,很少使用这种封装)。
avr微机励磁调节器 置位投退的意思
avr微机励磁调节器置位投退的意思
AVR 微机励磁调节器是一种用于同步发电机励磁控制的设备,它通过调节励磁电流来控制发电机的输出电压和无功功率。
在 AVR 微机励磁调节器中,“置位投退”通常是指将调节器的某些功能或参数设置为投入或退出状态。
具体来说,“置位投退”可能涉及到以下方面:
1. 励磁控制模式:AVR 微机励磁调节器可以支持多种励磁控制模式,如自动励磁控制(AEC)、手动励磁控制(MEC)等。
通过置位投退操作,可以选择启用或禁用特定的励磁控制模式。
2. 保护功能:AVR 微机励磁调节器通常具备多种保护功能,如过励保护、欠励保护、PT 断线保护等。
通过置位投退操作,可以启用或禁用这些保护功能。
3. 调节器参数:AVR 微机励磁调节器包含许多参数,如增益、时间常数、参考电压等。
通过置位投退操作,可以调整这些参数的值,以满足不同的运行要求。
4. 故障复位:当 AVR 微机励磁调节器检测到故障或异常情况时,会自动采取保护措施并发出报警信号。
通过置位投退操作,可以对故障进行复位,使调节器重新投入正常运行。
需要注意的是,具体的“置位投退”操作和功能可能因不同的 AVR 微机励磁调节器型号和厂家而有所差异。
在进行任何操作之前,务必仔细阅读设备的用户手册或咨询相关专业人士,以确保正确理解和操作设备。
AVR单片机进入睡眠状态及唤醒

AVR单片机进入睡眠状态及唤醒的C语言程序M16掉电模式的耗电情况(看门狗关闭),时钟为内部RC 1MHz0.9uA@Vcc=5.0V [手册的图表约为1.1uA]0.3uA@Vcc=3.3V [手册的图表约为0.4uA]//测量的数字万用表是FLUKE 15B,分辨率0.1uA这个程序需要MCU进入休眠状态,为实现最低功耗,JTAG接口会被关闭,只能通过LED的变化来观察程序的运行。
这个实验里面,用STK500(AVRISP) ISP下载线来烧录更方便。
熔丝位设置1 关断BOD功能 BODEN=12 如果用ISP方式烧录,就可以完全关闭JTAG口了 OCEEN=1,JTAGEN=1*/#include <avr/io.h>#include <avr/signal.h>#include <avr/interrupt.h>#include <avr/delay.h>//时钟定为内部RC 1MHz,F_CPU=1000000 也可以采用其他时钟#include <avr/sleep.h>/*sleep.h里面定义的常数,对应各种睡眠模式#define SLEEP_MODE_IDLE 0空闲模式#define SLEEP_MODE_ADC _BV(SM0)ADC 噪声抑制模式#define SLEEP_MODE_PWR_DOWN _BV(SM1)掉电模式#define SLEEP_MODE_PWR_SAVE (_BV(SM0) | _BV(SM1))省电模式#define SLEEP_MODE_STANDBY (_BV(SM1) | _BV(SM2))Standby 模式#define SLEEP_MODE_EXT_STANDBY (_BV(SM0) | _BV(SM1) | _BV(SM2)) 扩展Standby模式函数void set_sleep_mode (uint8_t mode);设定睡眠模式void sleep_mode (void);进入睡眠状态*///管脚定义#define LED 0 //PB0 驱动LED,低电平有效#define KEY_INT2 0 //PB3 按键,低电平有效void delay_10ms(unsigned int t){/*由于内部函数_delay_ms() 最高延时较短262.144mS@1MHz / 32.768ms@8MHz / 16.384ms@16MHz故编写了这条函数,实现更长的延时,并能令程序能适应各种时钟频率*/while(t--)_delay_ms(10);}int main(void){unsigned char i;//上电默认DDRx=0x00,PORTx=0x00 输入,无上拉电阻PORTA=0xFF; //不用的管脚使能内部上拉电阻。
单片机的几种复位方式
单片机的几种复位方式单片机作为嵌入式系统的核心处理器,其复位方式是非常重要的。
复位是指将单片机从非正常状态恢复到初始状态的操作,它是单片机系统中的必要环节。
本文将介绍单片机的几种复位方式。
1. 电源复位(Power-on Reset,POR):电源复位是单片机最基本的复位方式,它是在单片机上电时自动发生的。
当单片机上电时,电源管理电路会对单片机进行初始化,将其恢复到初始状态。
电源复位通常是由复位电路芯片或者单片机内部的复位电路实现的。
电源复位是最常见的复位方式,它确保了单片机在每次上电时都能处于可控的状态。
2. 外部复位(External Reset):外部复位是通过外部信号来触发的复位方式。
在单片机的外部引脚上连接一个复位按钮,当按下复位按钮时,外部复位信号会被单片机接收到并执行复位操作。
外部复位可以由用户手动触发,也可以由其他外部设备或控制器通过信号触发。
外部复位是一种常用的复位方式,它能够在系统出现故障或异常时快速恢复系统的正常工作状态。
3. 看门狗复位(Watchdog Timer Reset,WDT):看门狗复位是通过看门狗定时器来触发的复位方式。
看门狗定时器是一种计时器,它会在系统运行过程中定时检测系统是否正常工作,如果检测到系统异常或故障,就会触发复位操作。
看门狗复位通常用于监控系统的稳定性和可靠性,确保系统在长时间运行后能够自动恢复到正常状态。
4. 软件复位(Software Reset):软件复位是通过程序指令来触发的复位方式。
在单片机的编程中,可以通过特定的指令或者函数来执行软件复位操作。
软件复位可以根据系统需求灵活控制复位时机和复位方式,可以在特定条件满足时执行复位操作,也可以选择性复位系统的部分模块或寄存器。
软件复位是一种灵活可控的复位方式,常用于系统初始化和异常处理。
5. 系统复位(System Reset):系统复位是一种综合应用各种复位方式的复位方式。
在实际应用中,可以将多种复位方式结合起来,按照一定的策略和规则来执行复位操作。
AVR单片机的工作状态

AVR单片机的工作状态当AVR 芯片的Vcc 与系统电源接通后,根据RESET 引脚的电平值的不同,单片机将进进不同的状态:复位状态、常规工作状态、编程状态。
1.RESET 引脚电平为高通常情况下,RESET 引脚通过一个上拉电阻接系统电源,为高电平1 ,见图2-13。
在此条件下,一旦接通电源,AVR 将进进上电复位状态。
经过短暂的内部的复位操纵后,芯片便进进了常规的工作状态(BOD 和WDT 引起的复位类同)。
AVR 处在常规工作状态时,有两种工作方式:正常程序执行工作方式和休眠节电工作方式。
z 正常程序执行工作方式正常程序执行工作方式是单片机的基本工作方式。
由于硬件的复位操纵将程序计数器置为零(PC=$0000),因此程序的执行总是从Flash 地址的$0000 开始的(指非BOOT LOAD 方式启动)。
休眠节电工作方式休眠节电工作方式是使单片机处于低功耗节电的一种工作方式。
当单片机需要处于长时间等待外部触发信号,待有外部触发后才做相应的处理,或每隔一段时间才需要做处理的情况时,可以使用休眠节电工作方式,以减小对电源的消耗。
CPU 处于等待的时候(待机状态)可进进休眠节电工作方式,此时CPU 暂停工作,不执行任何指令。
在休眠节电工作方式中,只有部分单片机的电路处于工作状态,而其它的电路停止工作,这样就可节省单片机的对电源消耗,形成系统的省电待机状态。
一旦有外部的触发信号,或等待时间到,CPU 从休眠状态中被唤醒,重新进进正常程序执行工作方式。
2 RESET 引脚电平为低AVR 通电后,假如RESET 脚的电平被外部拉为低电平0 ,则芯片将进进和处在复位状态,见图2-16 和图2-17。
通常情况下,该复位状态一直延续到RESET 脚的低电平被撤消。
一旦RESET 恢复了高电平,AVR 将重新启。
AVR单片机上电复位不可靠问题的解决
AVR单片机上电复位不可靠问题的解决推荐昨晚在调试AVR 单片机时又有一些心得体会,虽然结论是一个很小的问题造成的,但在此还是写出来给大家参考,避免走弯路。
事件描述:以前用AVR 的芯片也做过好几个设计,从来没有怀疑过ATMEL 的芯片的稳定性,以前的几个方案都是很稳定的,当然这跟PCB 的设计有很大的关系,如果大家需要PCB 相关参考资料的话可以到本站的PCB 技术专栏里查找,那里有很多前辈的PCB 布板心得。
这次用的ATmega48 制作的串口电压表就出现一个很奇怪的现象,电路板是用万能板焊接的,程序里用到ADC 功能和串口通讯功能,用的AVR 下载工具是STK500,每次下载程序后芯片总是不能正常复位工作,还要读取下芯片的特征字或熔丝位让芯片重新复位下才能工作,这时候复位后工作都稳定,没出现什么不正常。
刚开始不在意这个问题,因为在开发的初期用AVR DRAGON 仿真调试部分功能时复位脚不能接任何器件,所以也就把复位脚悬着不接复位电路,以为是没接阻容复位而造成不稳定。
在此还是没有怀疑过芯片的问题。
直到后来这个程序都开发完毕了,给ATMEGA48 加上一个10K 的上拉电阻和0.1uF 的电容做复位,把ISP 线拔掉,独立给串口电压表上电(因为当时都是用几个电路模块连接做实验,串口电平转换电路也是独立的,初期串口调试已经都通过了,所以我把这个串口电平转换模块的连线都拔掉了),问题来了,上电不工作,手动把复位脚接地后放开可以工作,但过了一会后还是死了,加看门狗后还是老样,没有任何改善,每次手动复位正常工作后,把手指头放在ATMEGA48 的1、2、3 脚上方慢慢靠近,手指头还没碰到芯片就死机了~~~不会吧,没这么脆弱吧。
以前用AVR Tiny26 做的控制器,把手机放在芯片上方。
AVR教程系列一(12):ATmega16 简介(六)

ATmega16 简介(六)ATmega16 控制和状态寄存器MCUCSRAVR 控制和状态寄存器提供了有关引起AVR复位的复位源的信息。
? Bit 4 – JTRF: JTAG 复位标志通过JTAG 指令AVR_RESET 可以使JTAG 复位寄存器置位,并引发MCU 复位,并使JTRF 置位。
上电复位将使其清零,也可以通过写”0” 来清除。
? Bit 3 – WDRF: 看门狗复位标志看门狗复位发生时置位。
上电复位将使其清零,也可以通过写”0” 来清除。
? Bit 2 – BORF: 掉电检测复位标志掉电检测复位发生时置位。
上电复位将使其清零,也可以通过写”0” 来清除。
? Bit 1 – EXTRF: 外部复位标志外部复位发生时置位。
上电复位将使其清零,也可以通过写”0” 来清除。
? Bit 0 – PORF: 上电复位标志上电复位发生时置位。
只能通过写”0” 来清除。
为了使用这些复位标志来识别复位条件,用户应该尽早读取此寄存器的数据,然后将其复位。
如果在其他复位发生之前将此寄存器复位,则后续复位源可以通过检查复位标志来了解。
ATmega16 基准电压使能信号和启动时间ATmega16 具有片内能隙基准源,用于掉电检测,或者是作为模拟比较器或ADC的输入。
ADC 的2.56V 基准电压由此片内能隙基准源产生。
电压基准的启动时间可能影响其工作方式。
启动时间列于Table 16。
为了降低功耗,可以控制基准源仅在如下情况打开:1. BOD 使能 ( 熔丝位BODEN 被编程)2. 能隙基准源连接到模拟比较器(ACSR 寄存器的ACBG 置位)3. ADC 使能因此,当BOD 被禁止时,置位ACBG 或使能ADC 后要启动基准源。
为了降低掉电模式的功耗,用户可以禁止上述三种条件,并在进入掉电模式之前关闭基准源。
ATmega16 看门狗定时器看门狗定时器由独立的1 Mhz 片内振荡器驱动。
这是VCC = 5V 时的典型值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当然,在AVR的RST脚也接一个0.1uF的电容到GND,这电容的作用是很重要的。因为一般情况单片机受到干扰而复位基本是由于 RST受到干扰而 复位的。加上这个电容后有一定的作用,但也不是百分百的可以解决问题。所以前向的电源的处理很重要,前面的没处理好,5V端这边怎么折腾也是没什么好的效果。
当然,如果在交流侧有条件的话, 建议也加上EMI滤波电路。
我基本上按ATMEL提供的EMC注意手册里的说明来处理电源。现在把一个12V的直流电机直接接在正常工作的 ATTINY24 的系统里,然后不断的通断工作,相信这个干扰是很大的,但系统一直稳定工作,没有任何的死机复位现象。
PCB方面也是需要下工夫的,当然这个需要积累,建议多看看抗干扰方面的书籍和 PCB布线的书,收获是很大的。
随便说了一堆,可能还有很多片面的地方 ,希望对大家有所帮助。
使用AVR 芯片时, 很多人在实际使用的时候很容易出现工作过程中的复位,基本上是由于传导干扰造成的,而辐射干扰倒是可以通过PCB设计和铁壳屏蔽来解决。
而传导辐射就得需要在电源上下工夫了。
在5V直流电源端要做好滤波和去耦,在靠近AVR的VCC和GND的地方要加上0.1uF的独石电容或高频电容,可以很好的滤除从电源串入的高频脉冲干扰(这类的高频脉冲干扰基本上由同线路的电磁器件产生的,如电机、继电器,这类的器件多数情况下是和单片机同一路直流电源的,如12V、24V直流,而单片机的5V电源基本上是12V、24V电源端取的,然后进行稳压处理)。
掉电复位:就是在单片机运行过程中电压突然跌落,这个时候单片机会出现很多不确定的现象,所以在这个时候需要将单片机复位,让它处于一个确定的状态。这就是BOD功能,一个非常实用的功能,AVR单片机带有这个功能。
看门狗复位:这是我们常说的看门狗了,就是当程序进入某个地方长时间没有响应时将单片机复位,AVR单片机带有看门狗功能。
外部复位:这个就不用说了,就是通过复位脚强行对单片机进行复位。
老式RC复位电路:外部RC复位电路,在正常上电情况下可以做到上电复位功能,但上面提到的其它几种复位,它是无能为力的。
AVR单片机内部已经集成了一个功能完善的复位电路,完全可以取代专业复位电路,外部RC电路那更是不用说了。
所以单片机只要在复位脚接一个上拉电阻,然后打开内部看门狗及BOD功能就可以放心使用了。
AVR单片机复位是AVR单片机内部的复位功能还不太清楚,现在这里简单说一下,希望在家能有个总体的认识。不对之处希望大家指出,觉的好就帮忙顶两下。
AVR单片机复位大概有:上电复位、掉电复位、看门狗超时复位、外部复位,这么四种。
上电复位:就是在一通电的时候对单片机进行复位,这和我们外接RC复位电路的作用是一样的,AVR单片机内部带有上电复位功能。