力士乐驱动器
力士乐驱动器报警代码表

力士乐驱动器报警代码DKC故障诊断1诊断信息F和诊断信息E的说明1.1错误诊断信息FF205 凸轮轴故障F207 切换至未初始化运行模式F208 UL电机类型已变F209 PL装载参数默认值F211 DISC-Error no.1(1#错误)F212 DISC-Error no.2(2#错误)F212 DISC-Error no.3(3#错误)F212 DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器1故障:象限错误F230 超过编码器1最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器2故障:信号幅度错误F245 编码器2故障:象限错误F246 超过编码器2最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD模块固件升级过程中出现错误F291 EMD模块超时F292 EMD模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双MST故障关机F402 双MDT故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST故障关机F434 紧停E-STOPF629 超过正行程极限F630 超过负行程极限F634 紧停E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器1故障:信号幅度错误F843 编码器2故障:信号幅度错误F845 编码器2故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2报警诊断信息EE211 DISC-#1报警E212 DISC-#2报警E212 DISC-#3报警E212 DISC-#4报警E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动E260 指令电流限制活动E261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD模块固件升级活动E289 等待Ecox服务器端扫描E291 EMD模块超时E293 EMD模块欠电压E296 Ecox客户端数量不准确E386 电源模块无就绪信号E408 MDT数据存储器A无效编址E409 A T数据存储器A无效编址E410 客户端未被扫描或地址为0E411 双SST故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1指令诊断信息B、C和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段3转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT的配置IDN不可配置C105 配置长度大于MDT最大长度C106 A T的配置IDN不可配置C107 配置长度大于A T最大长度C108 时间片参数大于Sercos循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115 T2数值太小C118 MDT配置顺序错误C200 通讯阶段4转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014不准确C210 要求反馈2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1数据读取错误C218 反馈2数据读取错误C220 反馈1初始化错误C221 反馈2初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166和P-0-0167D906 位移范围超出2.2状态诊断信息AA000 通讯阶段0A001 通讯阶段1A002 通讯阶段2A003 通讯阶段3A009 SERCOS接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1的位置模式A103 使用编码器2的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1A109 驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1, 虚拟主驱动器A113 相位同步,编码器2. 虚拟主驱动器A114 相位同步,编码器1. 真实主驱动器A116 相位同步,无滞后,编码器1, 虚拟主驱动器A117 相位同步,无滞后,编码器2, 虚拟主驱动器A118 相位同步,无滞后,编码器1, 真实主驱动器A128 凸轮轴,编码器1, 虚拟主驱动器A129 凸轮轴,编码器2, 虚拟主驱动器A130 凸轮轴,编码器1, 真实主驱动器A132 凸轮轴,无滞后,编码器1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器1, 真实主驱动器A150 驱动器控制的定位,编码器1A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码故障描述对策C0270 电机编码器数据读取错误电机编码器回路故障,检查可能出现的三个地方:电机编码器,反馈线及CSB的编码器反馈口。
力士乐伺服驱动器故障代码e426

力士乐伺服驱动器故障代码e4261E825过电压、F277过电流、F873电源驱动板故障、F267、故障F860;Rexroth伺服驱动器维修:过载、缺相、BS红灯亮、H1数码管不亮、无报警无动作不输出、无显示、电机抖动、F30/6、内部冒烟/放炮;1.1错误诊断信息FF205凸轮轴故障F207切换至未初始化运行模式F208L电机类型已变F209PL装载参数默认值F211DISC-Error(1#错误)F212F212F212DISC-Errorno.2(2#错误)DISC-Errorno.3(3#错误)DISC-Errorno.4(4#错误)F217未接冷却风扇F218放大器过热关机F219电机过热关机F220制动电阻器过载关机F221电机温度监控器故障F223停止轴时的初始化过程错误F224超过最大制动时间F226功率部分欠电压F228过大偏差F229编码器1故障:象限错误F230超过编码器1最大信号频率F237位置指令的差值过大F238实际速度值的差值过大F242编码器2故障:信号幅度错误F245编码器2故障:象限错误F246超过编码器2最大信号频率F248电池电压过低F249主驱动器编码器故障:信号太小F250目标位置预置内存溢出F252主驱动器编码器故障:象限错误F253增量编码器仿真:脉冲频率太高F260指令电流极限关闭F262状态输出口出现外部短路F267内部硬件同步错误F269电机制动器释放过程中错误F276绝对编码器超出允许的窗口F277电流测量补偿错误F281主回路故障F288EMD模块固件升级过程中出现错误F291EMD模块超时F292EMD模块过热F294Ecox客户端超时F296Ecox客户端数量不准确F297Ecox客户端错误F386电源模块没有就绪信号。
力士乐报警代码及说明一揽

力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询;DKC故障诊断1诊断信息F和诊断信息E的说明错误诊断信息FF205凸轮轴故障F207切换至未初始化运行模式F208UL电机类型已变F209PL装载参数默认值F211DISC-Error1错误F212F212F212DISC-Error2错误DISC-Error3错误DISC-Error4错误 F217未接冷却风扇F218放大器过热关机F219电机过热关机F220制动电阻器过载关机F221电机温度监控器故障F223 停止轴时的初始化过程错误F224超过最大制动时间F226功率部分欠电压F228 过大偏差F229编码器1故障:象限错误F230超过编码器1最大信号频率F236位置反馈的差值过大F237 位置指令的差值过大F238实际速度值的差值过大F242编码器2故障:信号幅度错误F245编码器2故障:象限错误F246超过编码器2最大信号频率F248 电池电压过低F249主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252主驱动器编码器故障:象限错误F253增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262状态输出口出现外部短路F267内部硬件同步错误F269电机制动器释放过程中错误F276绝对编码器超出允许的窗口F277 电流测量补偿错误F281主回路故障F288EMD模块固件升级过程中出现错误 F291EMD模块超时F292EMD模块过热F294Ecox客户端超时F296Ecox客户端数量不准确F297Ecox客户端错误F386电源模块没有就绪信号F401双MST故障关机F402双MDT故障关机F403通信阶段关机F404阶段前进过程中出现错误F405 阶段后退过程中出现错误F406阶段切换无就绪信号F407 主通信初始化过程中的错误F411双SST故障关机F434紧停E-STOPF629超过正行程极限F630超过负行程极限F634紧停E-STOPF643 探测到正行程极位开关F644探测到负行程限位开关F811换算偏置无法确定F812 在换算过程中移动越程F822编码器1故障:信号幅度错误F843编码器2故障:信号幅度错误F845编码器2故障:象限错误F850 看门狗协处理器F860过流:功率部分有短路F870 +24v 直流错误F873电源驱动部分故障F878速度环错误F880经过优化的换算偏置错误报警诊断信息EE211DISC-1报警E212E212E212DISC-2报警DISC-3报警DISC-4报警E217冷却风扇转速太慢E221 报警电机温度监控有故障E225电机过载E226功率部分欠电压E247插补速度=0E248 插补加速度=0E249定位速度>=S-0-0091E250驱动器过热预报警E251电机过热预报警E252制动电阻器过载预报警E253 目标位置超出行程范围E254未回零E255进给倍率S-0-108=0E256 转矩限制=0E257连续电流限制活动E258选定的处理块未编程E259指令速度限制活动261 连续电流限制预报警E263速度指令值>极限S-0-0091E264 目标位置超过数字范围E267硬件同步有故障E269制动器的制动转矩太低E281主回路故障E288EMD模块固件升级活动EMD模块超时EMD模块欠电压Ecox客户端数量不准确E289等待Ecox服务器端扫描E291E293E296 E386电源模块无就绪信号E408MDT数据存储器A无效编址E409AT数据存储器A无效编址E410客户端未被扫描或地址为0E411双SST故障E825功率部分过电压E826功率部分欠电压E829超过正位置极限E830超过负位置极限E831在点动过程中达到位置极限E834紧停E-STOPE843 正限位开关活动E844负限位开关活动E881主回路故障E886电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明指令诊断信息B、C和DB100指令释放电机制动器B101 指令未使能B200制动器检查指令B201只在驱动器使能时进行制动器检查B202在制动器嵌入过程中出现错误B203制动器制动转矩太低 B300后备工作内存过程指令C100通讯阶段3转换检查C101无效通信参数S-0-0021C102 通信参数极限错误S-0-0021C104MDT的配置IDN不可配置C105配置长度大于MDT最大长度C106AT的配置IDN不可配置C107配置长度大于AT最大长度C108时间片参数大于Sercos循环时间C109MDTS-0-0009中的数据记录位置为偶数C110MDTS-0-0010长度为奇数C111 1D9+记录长度-1 大于长度MDTS-0-0010 C112 TNcycS-0-0001或TScycS-0-0002错误C113TNcycS-0-0001与TScycS-0-0002的关系错误C114T4大于TScycS-0-0002-T4minS-0-0005C115T2数值太小C118MDT配置顺序错误C200通讯阶段4转换检查C201无效参数S->S-0-0022C202参数极限错误->S-0-0022C203参数计算错误->S-0-0022C204电机类型P-0-4014不准确C210要求反馈2->S-0-0022C211无效反馈数据->S-0-0022 C212无效放大数据->S-0-0022C213 位置数据比例错误C214速度数据比例错误C215加速度数据比例错误C216 转矩/力数据比例错误C217反馈1数据读取错误C218反馈2数据读取错误C220反馈1初始化错误C221反馈2初始化错误C223 最大范围输入值太高C227模范围错误C234编码器不能组合C235负载侧电机编码器只可用于感应电机C236要求反馈1P-0-0074C238编码器2功能错误->S-0-0022C241必须为二进制编码器分辨率C242 一个参数的多重配置->S-0-0022C300指令设定绝对测量C302未安装绝对测量系统C400切换至参数方式 C401驱动器使能时,不允许切换C402 只允许在没有上位控制时C500复位1类诊断,错误复位C600驱动器控制的回零过程指令C601只在驱动器使能时才能够回零C602距离回零开关-参考标记错误C604绝对编码器不能回零C606未探测出参考标记C700基本参数装载C702默认参数不可用C703 默认参数无效C704参数不可拷贝C800调入默认参数C801 参数默认值错误->S-0-0021 C802密码锁定D300指令调整换算D301 驱动器未做好换算指令准备D302电机转矩/力太小,无法运动D303指令启动时驱动器处于控制状态D304偏置计算错误D305驱动器使能被拒绝D306系统断电D307驱动器不运动D308无法调整异步电机D309进入阶段4D310输入主密码D311 不能确定换算偏置D312在换算过程中超过运动范围D500指令获取标志位置D501要求增量编码器D600 取消回参考点过程指令D700轴禁止指令D701仅可在驱动器无使能时使用轴禁止指令D800测量轮模式指令D801测量轮不能运行D900 自动控制环调整指令D901启动要求驱动器使能D902电机反馈数据无效D903 惯量检测失败D904增益调整失败D905位移范围无效,P-0-0166和P-0-0167 D906 位移范围超出状态诊断信息AA000通讯阶段0A001通讯阶段1A002A003A009通讯阶段2通讯阶段3SERCOS接口的自动波特率检测A010 驱动停止A012控制和功率部分运行准备就绪A013接通电源准备就绪A100 驱动器处于转矩控制模式下A101驱动器处于速度控制模式下A102使用编码器1的位置模式A103使用编码器2的位置模式A104位置模式,无滞后,编码器1A105位置模式,无滞后,反馈2A106驱动器控制的插补,编码器1A107驱动器控制的插补,编码器2A108驱动器控制的插补,无滞后,编码器1A109驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111速度同步,真实主驱动器A112相位同步,编码器1,虚拟主驱动器A113相位同步,编码器2.虚拟主驱动器A114相位同步,编码器1.真实主驱动器A116相位同步,无滞后,编码器1,虚拟主驱动器A117相位同步,无滞后,编码器2,虚拟主驱动器A118相位同步,无滞后,编码器1,真实主驱动器A128凸轮轴,编码器1,虚拟主驱动器A129凸轮轴,编码器2,虚拟主驱动器A130凸轮轴,编码器1,真实主驱动器A132凸轮轴,无滞后,编码器1,虚拟主驱动器A133凸轮轴,无滞后,编码器2,虚拟主驱动器A134凸轮轴,无滞后,编码器1,真实主驱动器A150驱动器控制的定位,编码器1A151驱动器控制的定位,编码器1,无滞后A152驱动器控制的定位,编码器2A153驱动器控制的定位,编码器2,无滞后A154编码器1,驱动器受控的位置模式A155编码器1,无滞后,驱动器受控的位置模式A156编码器2,驱动器受控的位置模式A157编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器 1A207 数据处理块模式,无滞后,编码器 1A208 正向点动模式A210 数据处理块模式,编码器 2A211 数据处理块模式,无滞后,编码器 2 A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数 P-0-4014 有误; E2074 F2076 C0210 C0220 C0271 C0201 无效的参数, 当切换到操作模 1查看 S-0-0022 参数,该参数包含所有的无效参数,再更改无效参数;式 P4 时, 内部的参数被检测, 02,03 版固化软件对策电机编码器回路故障,检查可能出现的三个地方:电机编码器,反馈线及 CSB 的编码器反馈口;C0285确认电机型号及编码器的型号P-0-4014 ;检查可能出现的三个地方:电机编码器,反馈线及 CSB 的编码器反馈口;一些相关的编码器故障报警有参数超出它定义的范围时 2查看 S-0-0423 参数,该参数包含所有的无效参数,再更改无效参数就出现该报警; 扭矩过载04 版固化软件; 3通常加载基本参数后,导入备份参数可以解决此问题;E82601减小加速度; 2增大相应的限制值 S-0-0082, S-0-0083.S-0-0092,P-0-109; 3优化速度环参数 4增加外接制动电阻F2026驱动器功率单元欠压报警, 当 DC bus 电压值小于 P-0-0114 定义的值并有使能的情况下出现该报警; 电流检测错误, 硬件故障, 驱动器实时监控电流, 如超出允许范围时出现该报警1检查外部 380V 主电源,检查直流母线电压;2驱动器功率单元产生不了 DC,更换 HCS 功率单元; 3检查 PLC 时序,Ab、AF;F20771驱动器功率单元的电流霍尔传感器故障,更换 HCS 功率单元; 2控制单元 CSB 的电流计算回路有问题,更换 CSB 控制单元;F2816DC bus 故障1检查外部 380V; 2直流母线以及外部制动电阻接线; 3驱动器整流单元故障,更换 HCS 功率部分;F2018驱动器温度故障1降低环境温度; 2检查柜内冷却装置; 3清洗驱动器内部风扇; 4驱动器内部温度传感器故障,更换 HCS 功率部分;F2019 F2022电机温度报警 S-0-0204 为温度限定参数1检查机械是否有卡死导致电机过载发热; 2检查电机到驱动器的温度电缆X6-1、2是否松动脱落; 3电机温度传感器故障,更换电机; 4驱动器温度检测回路故障,更换 HCS 功率单元;F2820制动电阻报警1减小减速度和速度命令值; 2更换制动电阻,增加阻值; 3HCS-检查外部制动电阻以及与驱动器的接线X6-3、4 ; 4HMV-内部制动电阻故障,更换 HMV 电源模块;F2100不正常的访问 Fiash 内存,每一次修改参数都立刻对 Fiash 存储, 造成内存溢出;1将 S-0-0269 参数的 bito 置 1; 2使用 MMC 存储卡; 复位重启或者重新建立位置参考点;F2074电机当前位置超出绝对编码器监视窗口,断电时的位置与重新上电后的位置偏差太大,超过了监视窗口值 P-0-0095;F2048 F2008电机内的电池耗尽电机类型改变,下载了一个新的参数文件到驱动器,或者驱动器第一次上电,S-0-0141电机类型与当前的电机不一致;更换电机后盖内侧的电池直接复位即可F8070 F8069外部 24V 故障内部-15V 直流出错,内部有+24V 转 -15V 电路,它出现故障或内部的集成芯片短路;检查 24V 电源和接线更换 HCS 或 CSB F8060过流报警,驱动器内部电流超出最大的允许电流制动电阻过流如大功率管没有问题,则驱动器的电流检测回路有问题, 给予更换;1减小减速度和速度命令值; 2更换制动电阻,增加阻值; 3HCS-检查外部制动电阻以及与驱动器的接线X6-3、4 ; 4HMV-内部制动电阻故障,更换 HMV;F8838 F8102驱动器硬件和 Firmware 不匹配,检查 Firmware 版本, HCS 功率单元故障,给予更换;F8078速度环报警1电机动力线相序接反; 2速度环参数优化; 3由于用户自行拆装电机的编码器对同步电机 ,送力士乐校整; 4电机编码器坏,送修更换编码器; 5外部机械过重或卡死;F4001光缆环通讯错误,光缆环通讯的同步出现错误, 电机编码器信号弱1检查光缆、光缆卡接头; 2更换 CSB 控制单元;电机编码器回路故障,检查可能出现的三个地方:电机编码器,反馈线及 CSB 的编码器反馈口;F8022“bb”不能切不能整流产生直流换到“Ab” P0 或者 P1,切换不到 P2,BB 显示 FIRMWARE 错误光缆环通讯故障检查外部 380V,如确认有输入则需更换 HCS 功率单元; 1检查光缆、光缆卡接头; 2更换 CSB 控制单元;需要重新烧制或更换,类似于 DKC 显示“..”“LOADER”。
博世力士乐 ECO DRIVE 03 伺服驱动器

71 907 EN/01-10ECODRIVE03Electric Drives and Controls2ECODRIVE03ECODRIVE03 is a particularly cost-effectiveand universal automation system. It is verysuitable for virtually all areas of automationengineering in which linear or rotary move-ments up to 24 kW have to be controlled.Use the advantages of ECODRIVE03 andsafeguard your future by automating moreeconomically, saving on system componentsand simplifying installation and commission-ing.Typical applications are:•handling and assembly systems•packaging and food processing machines•printing and paper processing machines•machine toolscontrol.•••••••The motors– Suitable for any mechanicalsystemThis system is completed by the wide rangeof synchronous and asynchronous motorsfor rotary and linear feed movements, aswell as for main spindle applications:•For standard applications up to 72 Nmwith synchronous motors•For demanding requirements up to240 Nm with synchronous motors•For main spindle applications withasynchronous motors up to 24 kW•Asynchronous frameless motors up to24 kW•Linear synchronous and asynchronousmotors up to 22.000 N.34ECODRIVE03All features are standardAbsolute or incrementalposition measurementDifferent motor encoder systems permit ab-solute or incremental position measurement.All conventional encoder types can be usedas separate position encoders via the secondencoder input as required.Compact drive electronicsThe high level of integration of the drive elec-tronics enables you to use 300 mm standardcontrol cabinets for compact machine designs.Comprehensive diagnosticsTwo-digit diagnostics display on the unit andcomprehensive plain language displays of alloperating states at the control terminal or PCterminal support rapid location and elimina-tion of system malfunctions.Unit is rapidly replaced forservicingAll specific drive data are immediately avai-lable during servicing simply by plugging theprogramming module onto the spare unit,and your production can continue.Error response built into driveDuring commissioning you can set the res-ponse of the ECODRIVE03 drive in the emer-gency stop mode.is activated.EMC designdrive systemintelligent drives.Cost-saving AC mains input forinternational useThe control units can be directly connectedto all established international 3 x 200 V to3 x 480 V AC supply systems without theneed for a transformer. A single-phaseAC input is also possible for reduced powerratings. Depending on the drive’s task, youcan choose between individual and groupinfeed.Individual infeedWhere single control units are operated,each unit has its own AC supply. The mainsvoltage can therefore be fed to each unitseparately.Group infeedIf you are operating several control unitstogether, you can also connect and discon-nect groups of drives via a common mainscontactor. Each control unit of the group isthus supplied with mains voltage simul-taneously and directly. As a result, the linkcircuit voltage of the connected units isbuilt up as quickly as possible and the driveare immediately ready for use.5Convenient and time-saving commissioningDuring commissioning the control units auto-matically read all relevant motor parameters via the motor encoder. The DRIVETOP graphics program guides you quickly and purpose-fully through all the individual commission-ing steps via the control terminal or PC ter-minal. Here all the drive’s current internal state variables are clearly displayed. You aresupported at each step by extensive help texts.6With the analogue interface you can operateECODRIVE03 with a conventional controllerin a particularly cost-effective way.Speed or torque settings are then input viathe +/- 10 volt analogue interface.Position measurement withoutadditional complexityThe control unit provides the controller withthe current rotor positions as position actualvalues. For indirect position measurementyou therefore eliminate separate positionencoders and encoder cables.Absolute or incrementalposition outputThe position values can be output in anabsolute or incremental form.Resolution for high accuracycan be set by parametersThe resolution of the position actual valuescan be set by parameters as a number ofencoder lines from 1 to 65 536.Drift-free drive shutdownThe motor can be stopped and held withoutdrift via a switching input when the controlis active, irrespective of the set point.•Speed control•7You can store up to 64 positioning blocks,each with its own speed, acceleration and rate-of-change limits, in the control unit. The positioning blocks are selected via parallel inputs. Feedrate override is possible.Rotary and linear feed motionDepending on the axis kinematics, all posi-tion, speed and acceleration data can be given rotary or linear weightings.Built-in stepping motor interfaceWith the stepping motor interface you can use the ECODRIVE03 as a stepping motor drive. The drive system then operates in the position control mode and basically simulates a stepping motor. The position setpoints are transmitted incrementally by pulses from the controller to the control unit. The increment can be set by parameters in a range from 1to 65 536 steps per motor revolution.••Speed control••8interfaceThe SERCOS interface is an internationallystandardized real-time communicationssystem which allows you to utilize all thefacilities and advantages of digital drivetechnology. The serial data transmissionbetween the controller and the drives takesplace over fibre-optic cables and is free ofinterference.Reduced installation outlayThe use of fibre-optic cables and the elimi-nation of position encoders and their cablesreduce your wiring outlay to a minimum.Secure data transmissionThe data transmission between controllerand ECODRIVE03 takes place via fibre-opticcables arranged in a ring. This provides youwith maximum possible interference immu-nity as well as high data rates.Flexible in combinationAll data, parameters and commands to beexchanged are standardized. This ensurestrouble-free interaction between digitaldrives and controllers from different manu-facturers. You therefore utilize all the advan-tages of the respective products.Comprehensive diagnosticsThe SERCOS interface offers extensive diag-nostic facilities and enables the parametersof the ECODRIVE03 to be input via controllerterminals or PC terminals. This reduces yourdown times and considerably shortens your commissioning time.•Position control•Speed control••9ECODRIVE03 with DKC03PROFIBUS is a standardized, serial field bus system for the fast transmission of I/O signals.The PROFIBUS interface enables ECODRIVE03to operate in four operating modes.Reduced wiring outlayThe ring structure reduces your wiring outlay to a minimum.Flexible production changes and comprehensive diagnosticsParameters and diagnostic data can be exchanged via the PROFIBUS interface,thereby enabling position data to be rapidly and easily adapted to changes in production processes.Absolute or relative positioning dataA PLC controller can specify absolute or relative target positions via the PROFIBUS interface.Cost-effective and simple positioning axesThanks to the built-in point-to-point posi-tioning control system with internal position control, positioning tasks are implemented very cost effectively and positioning control cards are not required in the PLC.•Position control •Speed control••10ECODRIVE03 with DKC04INTERBUS is a standardized, serial field bussystem for the fast transmission of I/O signals.The INTERBUS interface enables ECODRIVE03to operate in four operating modes.Reduced wiring outlayThe ring structure reduces your wiring outlayto a minimum.Flexible production changesand comprehensive diagnosticsParameters and diagnostic data can beexchanged via the INTERBUS interface,thereby enabling position data to be rapidlyand easily adapted to changes in productionprocesses.Absolute or relative positioningdataA PLC controller can specify absolute orrelative target positions via the INTERBUSinterface.Cost-effective and simplepositioning axesThanks to the built-in point-to-point posi-tioning control system with internal positioncontrol, positioning tasks are implementedvery cost effectively and positioning controlcards are not required in the PLC.•Position control•Speed control••ECODRIVE03 with DKC05CANopen is a standardized, serial field bus system for the fast transmission of I/O signals.The CANopen interface enables ECODRIVE03to operate in four operating modes.Reduced wiring outlayThe ring structure reduces your wiring outlay to a minimum.Flexible production changes and comprehensive diagnosticsParameters and diagnostic data can be exchanged via the CANopen interface,thereby enabling position data to be rapidly and easily adapted to changes in production processes.Absolute or relative positioning dataA PLC controller can specify absolute or relative target positions via the CANopen interface.Cost-effective and simple positioning axesThanks to the built-in point-to-point posi-tioning control system with internal position control, positioning tasks are implemented very cost effectively and positioning control cards are not required in the PLC.•Position control •Speed control••the applicationwell as for main spindle applications.Synchronous motors for stringent requirementsing quality and machining speed. Air-cooled and liquid-cooled variants are available for extreme load conditions. The motorsbe supplied with multiturn absolute encoders, holding brake orkeyway as required.Synchronous motors for standard applicationsMKD motors are a particularly cost-effective solution for all gene-ral automation engineering applications up to 72 Nm. Air-cooled versions are available for extreme loading conditions. The motors turn encoder for relative position detection. The motors can also beas required.Synchronous motors for areas subject to explosion hazardT4 temperature range for use in paint plants or in the chemicalto 48 Nm. The motors are fitted with a single-turn encoder as standard for relative position detection. They can also be supplied with multiturn absolute encoders, holding brake or key-way asrequired.PAINTING PLANT (Picture, top left)The modular and compact construction of the control units minimizes the size of control cabinets in painting plants in the automotive industry. The use of the SERCOS interface and fibre-optic cables also considerably reduces the amount of cabling. (Dürr Systems GmbH)PACKAGING MACHINE (Picture, top centre)Thermoforming, filling and packaging machine line for the foodstuffs industry.Synchronized single drives replace mechanical transmission elements and maximize the number of cycles.(GEA FINNAH)HANDLING (Picture, right)Gantry loader with ECODRIVE forhandling letter containers in a German Post Office sorting centre. The MKD motors are fitted with integral worm drive. (DEMAG)GLASS PROCESSING (Picture, bottom left)5-axis gantry-type glass processing plant for removing coatings and cutting glass panes. ECODRIVE03 with SERCOSinterface permit tool path feedrates of 180 m/min with an accuracy of 0.02 mm.(HEGLA)WOODWORKING(Picture, bottom centre)Woodworking machine with 56 main and auxiliary axes for flexible and accurate complete machining of furniture parts.The compact design of the control units enables the drive electronics to be arranged in compact control cabinets -thus saving space. (WEEKE)ECODRIVE03Versatile and universal。
力士乐驱动器报警代码

力士乐驱动器报警代码DKC故障诊断1诊断信息F和诊断信息E的说明1.1错误诊断信息FF205 凸轮轴故障F207 切换至未初始化运行模式F208 UL电机类型已变F209 PL装载参数默认值F211 DISC-Error no.1(1#错误)F212 DISC-Error no.2(2#错误)F212 DISC-Error no.3(3#错误)F212 DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器1故障:象限错误F230 超过编码器1最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器2故障:信号幅度错误F245 编码器2故障:象限错误F246 超过编码器2最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD模块固件升级过程中出现错误F291 EMD模块超时F292 EMD模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双MST故障关机F402 双MDT故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST故障关机F434 紧停E-STOPF629 超过正行程极限F630 超过负行程极限F634 紧停E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器1故障:信号幅度错误F843 编码器2故障:信号幅度错误F845 编码器2故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2报警诊断信息EE211 DISC-#1报警E212 DISC-#2报警E212 DISC-#3报警E212 DISC-#4报警E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动E260 指令电流限制活动E261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD模块固件升级活动E289 等待Ecox服务器端扫描E291 EMD模块超时E293 EMD模块欠电压E296 Ecox客户端数量不准确E386 电源模块无就绪信号E408 MDT数据存储器A无效编址E409 A T数据存储器A无效编址E410 客户端未被扫描或地址为0E411 双SST故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1指令诊断信息B、C和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段3转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT的配置IDN不可配置C105 配置长度大于MDT最大长度C106 A T的配置IDN不可配置C107 配置长度大于A T最大长度C108 时间片参数大于Sercos循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115 T2数值太小C118 MDT配置顺序错误C200 通讯阶段4转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014不准确C210 要求反馈2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1数据读取错误C218 反馈2数据读取错误C220 反馈1初始化错误C221 反馈2初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166和P-0-0167D906 位移范围超出2.2状态诊断信息AA000 通讯阶段0A001 通讯阶段1A002 通讯阶段2A003 通讯阶段3A009 SERCOS接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1的位置模式A103 使用编码器2的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1A109 驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1, 虚拟主驱动器A113 相位同步,编码器2. 虚拟主驱动器A114 相位同步,编码器1. 真实主驱动器A116 相位同步,无滞后,编码器1, 虚拟主驱动器A117 相位同步,无滞后,编码器2, 虚拟主驱动器A118 相位同步,无滞后,编码器1, 真实主驱动器A128 凸轮轴,编码器1, 虚拟主驱动器A129 凸轮轴,编码器2, 虚拟主驱动器A130 凸轮轴,编码器1, 真实主驱动器A132 凸轮轴,无滞后,编码器1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器1, 真实主驱动器A150 驱动器控制的定位,编码器1A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码。
力士乐驱动器报警代码

DKC 故障诊断1诊断信息F和诊断信息E的说明1.1 错误诊断信息FF205 凸轮轴故障F207 切换至未初始化运行模式.F208 UL电机类型已变F209 PL装载参数默认值F211 DISC – Error no.1(#1错误)F212 DISC – Error no.2(#2错误)F212 DISC – Error no.3(#3错误)F212 DISC – Error no.4(#4错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器 1故障:象限错误F230 超过编码器 1最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器 2故障:信号幅度错误F245 编码器2故障:象限错误F246 超过编码器2最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD模块固件升级过程中出现错误F291 EMD模块超时F292 EMD模块过热F294 Ecox客户端超时F296 EcoX客户端数量不正确F297 EcoX客户端错误F386 电源模块没有就绪信号F401 双 MST故障关机F402 双 MDT故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST故障关机F434 紧停 E-STOPF629 超过正行程极限F630 超过负行程极限F634 紧停 E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器 1故障:信号幅度错误F843 编码器2故障:信号幅度错误F845 编码器 2故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24伏直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2 报警诊断信息 EE211 DISC - #1报警E212 DISC - #2报警E212 DISC - #3报警E212 DISC - #4报警E217 冷却风扇转速大慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度 > = S-0-0091E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率 S-0-108 = 0E256 转矩限制=0E257 连续电流限制活动E261 连续电流限制预报警E258 选定的处理块未编程E259 指令速度限制活动E260 指令电流限制活动E261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD模块固件升级活动E289 等待EcoX服务器端扫描E291 EMD模块超时E293 EMD模块欠电压E296 EcoX客户端数量不正确E386 电源模块无就绪信号E408 MDT数据存储器A无效编址E409 AT数据存储器A无效编址E410 客户端未被扫描或地址为0E411 双SST故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停 E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1 指令诊断信息B、C和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低..B300 后备工作内存过程指令C100 通讯阶段3转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT的配置IDN不可配置C105 配置长度大于MDT最大长度C106 AT的配置IDN不可配置C107 配置长度大于AT最大长度C108 时间片参数大于Sercos循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 ID9 + 记录长度-1 大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4 大于TScyc(S-0-0002)- T4min(S-0-0005)C115 T2数值太小C118 MDT配置顺序错误C200 通讯阶段4转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014不正确C210 要求反馈2(-> S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大器数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1数据读取错误C218 反馈2数据读取错误C220 反馈1初始化错误C221 反馈2初始化错误C233 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(-> S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置.D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166和 P-0-0167D906 位移范围超出2.2 状态诊断信息AA000 通讯阶段0A001 通讯阶段1A002 通讯阶段2A003 通讯阶段3A009 SERCOS接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1的位置模式A103 使用编码器2的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1 A109 驱动器控制的初步,无滞后,编码器2 A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1,虚拟主驱动器A113 相位同步,编码器2,虚拟主驱动器A114 相位同步,编码器1,真实主驱动器A116 相位同步,无滞后,编码器1,虚拟主驱动器A117 相位同步,无滞后,编码器2,虚拟主驱动器A118 相位同步,无滞后,编码器1,真实主驱动器A128 凸轮轴,编码器1,虚拟主驱动器A129 凸轮轴,编码器2,虚拟主驱动器A130 凸轮轴,编码器1,真实主驱动器A132 凸轮轴,无滞后,编码器1,虚拟主驱动器A133 凸轮轴,无滞后,编码器2,虚拟主驱动器A134 凸轮轴,无滞后,编码器1,真实主驱动器A150 驱动器控制的定位,编码器1A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至静止状态A402 驱动器处于自动模式A800 不明运行模式。
力士乐伺服驱动器故障代码

内部+-15V 直流出错,内部有+24V转+-15V电 路,它出现故障或内部的集成芯片短路
F8060
过流报警,驱动器内部电流超出最大的允许电 流
F8838
制动电阻过流
F8102
驱动器硬件和Firmware不匹配,检查Firmware 版本,HCS功率单元故障,给予更换
F8078
速度环报警
(1)电机动力线相序接反 (2)速度环参数优化 (3)由于用户自行拆装电机的编码器(对同步电 机),送力士乐校整 (4)电机编码器坏,送修更换编码器 (5)外部机械过重或卡死 (1)检查光缆、光缆卡接头 (2)更换CSB控制单元
电机编码器回路故障,检查可能出现的三个地方:电 机编码器,反馈线及CSB的编码器反馈口
F2026
驱动器功率单元欠压报警,当DC bus电压值小 于P-0-0114定义的值并有使能的情况下出现该 报警
F2077
电流检测错误,硬件故障,驱动器实时监控电 流,如超出允许范围时出现该报警
F2816
DC bus故障
F2018
驱动器温度报警
F2019 F2022
电机温度报警 (S-0-0204为温度限定参数)
检查外部380V,如确认有输入则需更换HCS功率单元
(1)检查光缆、光缆卡接头 (2)更换CSB控制单元
需要重新烧制或更换,类似于DKC显示“..”
(1)检查外部380V主电源,检查直流母线电压 (2)驱动器功率单元产生不了DC,更换HCS功率单 元
(1)驱动器功率单元的电流霍尔传感器故障,更换 HCS功率单元 (2)控制单元CSB的电流计算回路有问题,更换CSB 控制单元 (1)检查外部380V (2)直流母线以及外部制动电阻接线 (3)驱动器整流单元故障,更换HCS功率部分 (1)降低环境温度 (2)检查柜内冷却装置 (3)清洗驱动器内部风扇 (4)驱动器内部温度传感器故障,更换HCS功率部 分 (1)检查机械是否有卡死导致电机过载发热 (2)检查电机到驱动器的温度电缆(X6-1、2)是 否松动脱落 (3)电机温度传感器故障,更换电机 (4)驱动器温度检测回路故障,更换HCS功率单元 (1)减小减速度和速度命令值 (2)更换制动电阻,增加阻值 (3)HCS-检查外部制动电阻以及与驱动器的接线 (X6-3,4) (4)HMV-内部制动电阻故障,更换HMV电源模块
力士乐

D905 位移范围无效,P-0-0166 和 P-0-0167
D906 位移范围超出
2.2 状态诊断信息 A
A000 通讯阶段 0
A001 通讯阶段 1
A002 A003 A009 通讯阶段 2 通讯阶段 3 SERCOS 接口的自动波特率检测
A010 驱动停止
E288 EMD 模块固件升级活动 EMD 模块超时 EMD 模块欠电压 Ecox 客户端数量不准确
E289 等待 Ecox 服务器端扫描
E291 E293 E296
E386 电源模块无就绪信号
E408 MDT 数据存储器 A 无效编址
E409 AT 数据存储器 A 无效编址
1 A151 驱动器控制的定位,编码器 1,无滞后
A152 驱动器控制的定位,编码器
2 A153 驱动器控制的定位,编码器 2,无滞后
A154 编码器 1,驱动器受控的位置模式
A155 编码器 1,无滞后,驱动器受控的位置模式
A156 编码器 2,驱动器受控的位置模式
A157 编码器 2,无滞后,驱动器受控的位置模式
F253 增量编码器仿真:脉冲频率太高
F260 指令电流极限关闭
F262 状态输出口出现外部短路
F267 内部硬件同步错误
F269 电机制动器释放过程中错误
F276 绝对编码器超出允许的窗口
F277 电流测量补偿错误
F281 主回路故障
F288 EMD 模块固件升级过程中出现错误
D501 要求增量编码器
D600 取消回参考点过程指令
D700 轴禁止指令
D701 仅可在驱动器无使能时使用轴禁止指令
力士乐驱动器诊断维修基础

力士乐驱动器诊断维修基础东风有限商用车公司发动机厂装备管理部凌雪摘要:本文介绍了力士乐驱动器诊断的维修基础,出现报警信息基本的维修手段,通过此课题可使维修人员在以后的维修过程中对其报警信息充分了解,找到最快的途径解决故障问题,对以后的这方面学习有很好的推进作用。
关键词:力士乐驱动器诊断信息故障信息故障处理一、概述:4H缸体多台专机设备由设备制造厂制造,采用西门子PLC,力士乐驱动器对其伺服轴进行控制。
由于这些专机多用于零件精加工,同时我厂技术人员对其维修相关的知识了解不是太多,因而在设备运行中出现故障边维修边学习,同时技术人员在工作之余阅读了相关的维修资料,为此我个人结合现场实际简要总结了相关的维修基础,希望可以对以后力士乐驱动器的诊断及维修工作起到良好的推进作用。
二、诊断信息说明1、诊断信息的结构1.1诊断信息编号及文本:图1-1:带诊断信息编号和文本的诊断信息对于图中示例,“F2”和“28”在H1 显示器上交替显示。
控制系统可以按照十六进制形式读取参数S-0-0390 即诊断信息编号中的诊断编号。
此外,驱动器还为控制系统提供诊断编号和诊断文本,作为参数S-0-0095 诊断信息中的一个字符串F228 偏差过大。
1.2 驱动模块上的显示器:H1 模块上的显示器可用于驱动器的诊断信息的显示。
图1-2 用在HDS 和HD 型控制器上H1 和H2 显示器这个双位七段显示器上可以显示诊断号。
具体的显示内容可参看图“带有优先权的诊断信息显示”(图1-3)。
这个显示器可不使用通信接口,快速显示系统当前的运行状态。
但从H1 显示器上看不到当前的运行方式。
如果驱动器状态与运行方式相符,而且没有运行指令,则符号“AF”会出现在显示器上。
1.3诊断信息输入优先权:如果不止一个诊断信息在等待显示,则首先显示具有最高优先级的信息。
下图按重要次序对运行状态进行分类。
图1-3:带有优先级的诊断信息显示诊断信息代码码诊断信息代码中包括诊断信息编号,随后是诊断文本,有如示例“偏差过大”(图1-1)所示。
力士乐驱动器使用说明书
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
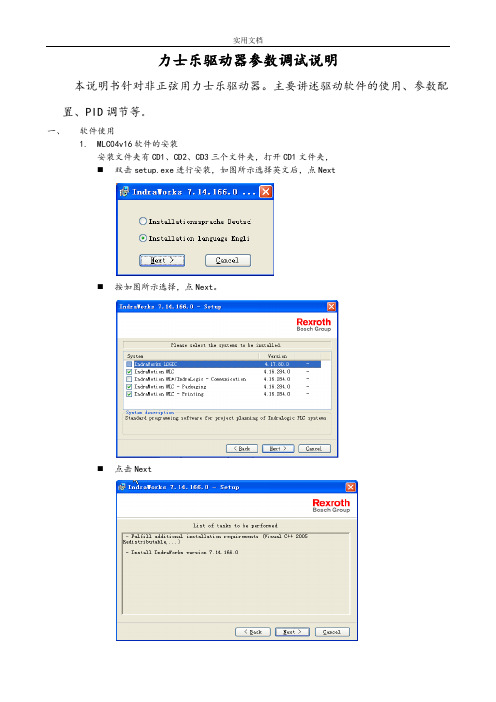
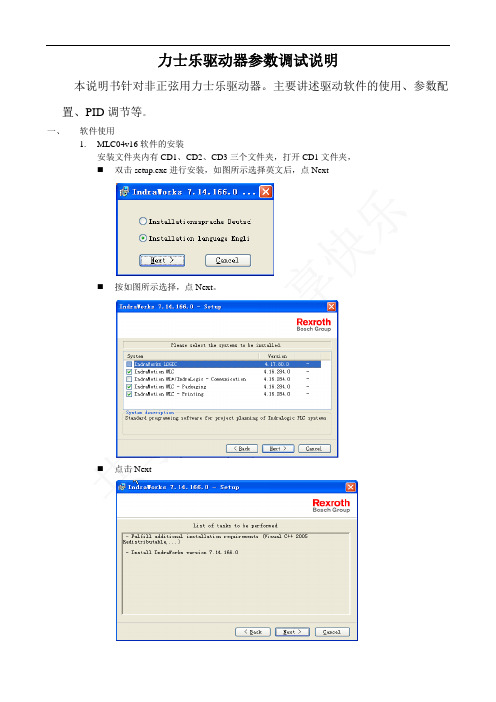
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
力士乐驱动器使用说明

力士乐驱动器使用说明一、产品概述二、产品特点1.高性能:力士乐驱动器具有高精度、高效率、高可靠性等特点,能够满足各种机械设备运动控制的需求。
2.多功能:力士乐驱动器支持多种运动方式,如定速运动、变速运动、位置控制等。
3.易操作:力士乐驱动器配备了直观的人机界面,操作简单便捷,适用于不同的用户。
三、产品安装1.将力士乐驱动器和机械设备的电源断开。
2.将力士乐驱动器与机械设备连接,确保连接稳定可靠。
3.将力士乐驱动器连接到电源,确保电压和电流符合设备要求。
四、产品操作1.开机和关机:按下电源按钮,等待指示灯亮起表示开机,再次按下按钮即可关机。
2.运动模式选择:通过控制面板上的旋钮或按键,选择所需的运动模式。
3.运动参数设置:通过控制面板上的键盘或旋钮,设置运动参数,如速度、加速度、位置等。
4.运动控制:按下启动按钮,力士乐驱动器即开始执行设定的运动模式和参数。
5.报警处理:在使用过程中,如发生故障、运动超速、温度过高等异常情况,力士乐驱动器会自动发出报警声音并停止运动,此时需要及时处理故障并重启设备。
五、常见问题与解答1.为什么电机无法启动?答:请检查电源是否连接正常、电压是否稳定、电机是否接线正确,并确保输入端子的连线牢固可靠。
2.如何设置运动速度?答:进入运动参数设置界面,通过键盘或旋钮输入所需的速度值,并确认保存设置。
3.如何防止电机过热?答:力士乐驱动器会自动监测电机温度,在温度超过设定值时会发出报警并停止运行,此时请检查散热系统是否正常、风扇是否工作正常。
4.小范围精确位置如何控制?答:力士乐驱动器支持微调功能,通过微调按钮,可以对小范围内的位置进行精确调整。
六、产品维护1.定期检查:定期检查力士乐驱动器的电源线、电机接线、控制线等是否正常连接。
2.清洁保养:定期清洁驱动器表面的灰尘和污垢,保持产品的散热性能。
3.注意防潮防湿:力士乐驱动器应存放在干燥、通风的地方,避免受潮和受湿。
七、产品注意事项1.请遵循产品的使用说明,不要随意更改参数或进行不必要的操控。
中文力士乐 系列DKC伺服驱动器参数手册

前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
Rexroth IndraDrive Cs ACS01 伺服驱动器 产品手册说明书

Rexroth IndraDrive Cs ACS01伺服驱动器版本03产品手册R912008283Rexroth IndraDrive Cs ACS01伺服驱动器产品手册DOK-INDRV*-ACS01******-PR03-ZH-PRS-6d0559b3a9217a2a0a347e8600d30991-3-zh-CN-7●Rexroth IndraDrive Cs 系统概述●Rexroth IndraDrive Cs 系统组件组合方式说明●Rexroth IndraDrive Cs 系统组件选择●操作规范●系统特性应用说明出版颁发日期备注012020-01第一版022020-04功能新增032020-06参数更新版权© 博世力士乐(西安)电子传动与控制有限公司 2020保留所有权利, 也保留包括任何使用、利用、翻印、编辑、转让以及申请知识产权的权利。
责任规格数据仅用于产品说明,如果未在合同中明确规定,不得视为对特性的保证。
本公司保留关于该文档内容和产品可用性的所有权利。
题目文件类型文件类型代号内部存档附注文件用途更改过程Rexroth IndraDrive Cs ACS01伺服驱动器Rexroth IndraDrive Cs ACS01伺服驱动器 I目录目录页数1 系统介绍 (1)1.1 Rexroth IndraDrive Cs 系列 (1)1.1.1 概述–Rexroth IndraDrive Cs (1)1.1.2 行业应用 (2)1.1.3 特性 (3)1.2 系统配置 (5)1.2.1 系统结构 (5)1.2.2 驱动器组件 (6)2 安全使用说明 (9)2.1 合理使用 (9)2.1.1 使用须知 (9)2.1.2 应用场合 (9)2.2 不当使用 (10)2.3 使用安全说明 (10)2.3.1 安全使用要求 (10)2.3.2 使用不当引发的危险 (10)2.3.3 与电气元件和外壳接触的防护 (10)2.3.4 危险动作的防护 (11)2.3.5 与高温部件接触的防护 (12)2.3.6 电池安全 (12)2.4 警示词和安全提示符号 (13)3 组件组合 (15)3.1 各组件简介 (15)3.1.1 ACS01---简要说明及设计构成 (15)3.2 配置驱动系统 (15)3.2.1 伺服驱动器 (15)3.2.2 设备功能 (16)3.2.3 电机 (16)3.2.4 电机电缆 (21)3.3 安装条件 (21)3.3.1 安装条件与操作环境 (21)3.3.2 控制柜设计结构与散热 (24)3.4 机械项目规划 (25)3.4.1 驱动器 (25)3.5 电气项目规划 (31)3.5.1 连接图 (31)3.5.2 控制电压项目规划 (32)3.5.3 电源连接电源电压 (36)3.5.4 直流母线耦合 (60)3.6 验收测试及认证 (67)R912008283_版本03 Bosch Rexroth AG页数4供货、标签、运输及存放 (69)4.1 供货................................................................................... 694.1.1 出厂测试.............................................................................. 694.1.2 用户测试.............................................................................. 694.2 标签................................................................................... 704.2.1 铭牌.................................................................................. 704.2.2 包装清单.............................................................................. 714.3 组件运输............................................................................... 724.4组件存放 (72)5安装 (73)5.1 控制柜内安装ACS01...................................................................... 735.2 电气连接............................................................................... 745.2.1 连接图................................................................................ 745.2.2 连接点................................................................................ 755.2.3 板载连接点............................................................................ 765.2.4设计与安装过程中的电磁兼容措施 (96)6组件参数 (105)6.1 控制单元.............................................................................. 1056.1.1 EC-多类型编码器接口.................................................................. 1056.1.2 ET-多协议实时以太网网口.............................................................. 1296.1.3 数字量输入/输出...................................................................... 1356.1.4 电压型模拟量输入..................................................................... 1406.1.5 电流型模拟量输入..................................................................... 1416.1.6 模拟量输出........................................................................... 1416.1.7 继电器触点........................................................................... 1426.2 控制面板.............................................................................. 1436.2.1 设计................................................................................. 1436.3 电源.................................................................................. 1446.3.1 控制电压............................................................................. 1446.3.2 电源电压............................................................................. 1456.3.3 直流母线............................................................................. 1496.3.4 集成制动电阻......................................................................... 1516.3.5逆变器 (151)7电缆、配件及附加组件 (155)7.1 概述.................................................................................. 1557.1.1 电缆................................................................................. 1557.1.2 配件................................................................................. 1557.1.3 附加组件............................................................................. 1567.2 配件.................................................................................. 1577.2.1 安装及配件连接(HAS09).............................................................. 1577.2.2 直流母线连接器(RLS0778/K06)........................................................ 1637.2.3RKB0013,以太网通讯 (164)II 目录Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 III目录页数7.3 附加组件 (165)7.3.1 电源滤波器NFD / NFE (165)7.3.2 电源电抗器 (168)7.3.3 HLR外部制动电阻 (172)7.3.4 直流侧电容单元HLC (179)8 环境保护及废弃处置 (183)8.1 环境保护 (183)8.2 废弃处置 (183)9 服务与支持 (185)10 附录 (187)10.1 电缆横截面及保险丝尺寸选型 (187)10.2 测量泄露电容 (194)10.3 电容泄露 (195)10.3.1 电机电容泄露 (195)10.3.2 电力电缆电容泄露 (196)索引 (199)R912008283_版本03 Bosch Rexroth AGIV Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 1/201系统介绍1 系统介绍1.1 Rexroth IndraDrive Cs 系列1.1.1 概述–Rexroth IndraDrive Cs表格1-1:Rexroth IndraDrive Cs 系列组件R912008283_版本03 Bosch Rexroth AG1.1.2行业应用通用自动化、搬运、组装自动化组装及搬运系统码垛系统、取放系统、物流......机床小型机(例如木材加工)、辅机......食品及包装行业灌装及密封、码垛、装箱、封箱、贴标......印刷机械标签打印、贴标、数字印刷、定位......半导体行业半导体/晶圆生产、处理、金属化、清洗、太阳能电池生产......表格1-2:目标应用2/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.1.3 特性功能特性●结构紧凑●防护等级IP20●具有存储和控制功能的操作面板●多类型编码器接口支持多种主流编码器(ACUROlink、HIPERFACE®、EnDat2.1、EnDat2.2、SSI、TTL、 sin/cos 、旋转变压器、MS2N 编码器、MSC编码器 )●直流母线连接●1个模拟量输入 (14位, ±10 V)●8个数字量输入–2个探针输入–1个组合式数字量端口,可配置为数字量输入或输出●可调节的风扇控制●集成制动电流测量和监控●电机输出端绕组短路触发停机保护机制●支持MSC永磁同步伺服电机●霍尔传感器适配盒SHL03.1,用于操作带有数字霍尔传感器的MCL直线电机性能特征规格(宽:50 mm;高:215 mm)规格(宽:70 mm;高:268 mm)规格(宽:130 mm;高:268 mm)ACS1-W00...→0818283654主电源V 3 AC 200 … 500 V最大输出电流(4kHz)A rms818283654表格1-3:ACS01伺服驱动器规格参数Rexroth IndraDrive Cs ACS01伺服驱动器 3/201系统介绍R912008283_版本03 Bosch Rexroth AG接口概述●兼容IndraDrive 平台●支持以下协议的实时以太网通讯:–sercos III –EtherCAT(SoE)–EtherCAT(CoE)–PROFINET IO –EtherNet/IP●多类型编码器接口●模拟量输入●可自由配置的数字量输入/输出可用编码器可用编码器供电电压为5 V 和12 V 的编码器:●MSC 电机编码器●MSK 电机编码器●MS2N 电机编码器●ACUROlink 编码器●1V pp 正弦编码器,HIPERFACE®●1V pp 正弦编码器,EnDat 2.1、EnDat 2.2●1V pp 正弦编码器(配置参考信道)●省线式TTL 编码器●SSI●组合式编码器SSI(SSI 及1V pp 正弦编码器)●旋转变压器●SHL02.1霍尔传感器适配盒●数字霍尔传感器与SHL03.1霍尔传感器适配盒可配合使用4/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.2系统配置1.2.1系统结构*可选项24V 控制电压COM 通讯DST 自耦变压器F 保险丝ACS01伺服驱动器HLC 直流母线电容单元(用于连接直流母线的设备)HLR 外部制动电阻HNL 电源电抗器NF 电源滤波器K1外部电源接触器M 电机RB内部制动电阻(位于驱动器后方)插图1-1:Rexroth IndraDrive Cs 驱动系统系统介绍系统介绍1.2.2 驱动器组件ACS01 伺服驱动型号系统介绍表格1-4:ACS01型号说明HAP01 键盘图示插图1-2:HAP01 键盘型号表格1-5:HAP01型号说明系统介绍2安全使用说明2.1合理使用2.1.1使用须知Bosch Rexroth 产品代表着先进的开发和制造水平。
力士乐驱动器调试指南

力士乐驱动器调试指南1.检查电源和连接:首先,确保驱动器和电机正确连接到电源,并且电压和相位设置正确。
检查所有电缆和连接器是否牢固且没有损坏。
2.配置参数:在使用力士乐驱动器之前,必须正确配置一些参数,如电机参数、速度、加减速度等。
查阅力士乐驱动器的用户手册以了解如何正确配置这些参数。
3.检查报警和故障代码:如果驱动器出现了报警或故障代码,查阅用户手册以找到相应的解决方法。
常见的问题包括过载、过热、低电压等。
解决问题后,需要清除报警或故障代码。
4.调试电机运动:在驱动器配置完成后,可以尝试调试电机的运动。
首先尝试手动控制电机的转动,确保电机能够正常运转。
之后,可以尝试使用驱动器的自动运动功能,比如速度控制和位置控制。
如果发现电机在运动过程中出现异常,可以通过调整参数来进行修正。
5.观察电流和速度:通过观察电机的电流和速度可以判断电机的负载情况和运动是否正常。
如果电流过高或速度不稳定,可能是由于电机配置参数设置不当或驱动器故障引起的。
根据情况进行相应的调整或查找故障原因。
6.检查驱动器保护功能:力士乐驱动器通常配备了多种保护功能,如过载保护、过热保护等。
在调试过程中,可以尝试触发这些保护功能,确保它们正常工作。
如果保护功能无法正常工作,可能需要检查保护功能的配置或驱动器是否损坏。
总结起来,力士乐驱动器调试主要包括电源和连接检查、参数配置、报警和故障代码处理、电机运动调试等。
通过仔细检查和调整,您应该能够有效地解决大多数问题并使驱动器正常运转。
如果遇到无法解决的问题,及时寻求技术支持是解决问题的最佳途径。
希望以上调试指南能对您有效地使用力士乐驱动器有所帮助。
力士乐驱动器使用说明
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
力士乐伺服驱动器故障代码解释及对策

力士乐伺服驱动器故障代码解释及对策
1. ALM(Alarm)故障代码:力士乐伺服驱动器检测到一个或多个故障。
此时,驱动器将进入报警状态并停止运行。
对策:首先,检查驱动器的接线是否正确,确保电源和控制信号正确连接。
其次,检查驱动器的指示灯是否有其他故障状态,并参考手册中的报警代码表来排除故障。
2. PSF(Power Supply Fault)故障代码:驱动器检测到电源供应电压异常,如过高或过低。
对策:检查电源供应,确保电压在规定范围内。
如超过规定范围,应检查电源线路和电源稳压器来解决供电问题。
3. OHC(Overheat Control)故障代码:驱动器温度过高。
对策:检查驱动器周围是否有过热源,确保风扇和散热器正常工作。
同时,尽量减少或避免长时间高负载操作。
4. OVC(Overcurrent Control)故障代码:驱动器检测到电流超过了额定值。
对策:检查驱动器输出的负载,确保没有阻塞或故障。
检查电机和驱动器的参数设置是否正确,并根据负载情况调整驱动器的电流参数。
5. SDN(Speed Monitor)故障代码:驱动器检测到电机转速异常。
对策:首先,检查驱动器和电机的接线是否正确。
然后,检查转速传感器或编码器的连接和功能是否正常。
最后,检查速度反馈参数设置是否正确。
对策:检查通信线路和连接器是否正确连接。
确保使用的通信协议和参数设置与其他设备相匹配。
如果使用的是串行通信接口,还应检查波特率设置是否正确。
力士乐控制器CML45.1-3P-500-NA-NNNN-NW到货啦
力士乐控制器CML45.1-3P-500-NA-NNNN-NW到货啦力士乐控制器CML45.13P500NANNNNNW到货啦!R911170828 CML45.13P500NANNNNNW力士乐伺服控制器没有现货的额,货期2024周左右哦,需要订货的哈,原装全新正品,力士乐询价都需要提供订货号才能报价哦,CML45.13P500NANNNNNW价格好,报价快,到货也快哦。
一手货源,不拼单,不倒手,到货快,源头直采。
“无论有多困难,都坚强地抬头挺胸。
人生是一场醒悟,不要昨天,不要明天,只要今天。
活在当下,放眼未来。
人生是一种态度,心静自然天地宽。
不一样的你我,不一样的心态,不一样的人生。
考虑一千次,不如去做一次;犹豫一万次,不如实践一次。
华丽的跌倒,胜过无谓的徘徊,迈出第一步,才可以收获停不住。
因为输不起的人往往也赢不了,要有勇气。
人的一生如果你自己不努力,你这一辈子都有可能在原地踏步。
”力士乐伺服驱动器R911170828 CML45.13P500NANNNNNW(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,是传动技术的端产品。
力士乐伺服驱动器R911170828 CML45.13P500NANNNNNW工作原理伺服驱动器主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
查阅 "LWL (Fiber Optic Cable) - Handling" 应用手册
14
光缆的选择连接
15
H1 控制面板借口
在显示器上将显示需要得到的问题 -- 操作状态,指令和诊断,和警告. 设置驱动器地址 • SERCOS: 设置传输功率 • SERCOS 自动检测:设置现场总 线传输率 • 建立 参考尺寸 • 考虑错误储存器 • 启动默认产品的基本装载 • 设置模拟量输出
X7 是在一个多媒体卡(MMC) 读数 据(固化软件,参数,运行数据)和储存 数据.
7
8
9
连接编码器系统的电流消耗,在连接线的电阻上产生一个电压降(取决于连接 线的截面和长度).减小了在编码器上的信号. 为了补偿电压降落,使用一个电压传感器,检测施加在编码器上器 为了取得连接线长度和编码器的电流补偿,需要一个最小连接线截面. 这个相互关系如下面的图. • 连接线截面 : 0.5 mm2 • 最小允许电源电压: 9 V ±5% 和10 V ±5%
目 录
模拟量控制系统的组成 PID控制系统 S7-300实现PID闭环控制的方法
现场实现PID闭环控制的架构
1
1
模拟量控制系统的组成ቤተ መጻሕፍቲ ባይዱ
1.1模拟量环控制系统 工业控制中的闭环控制: 在工业生产中,一般用闭环控制方式来控制温度、压力、流量这一类连续变化的模拟量,使用得最多 的是PID控制。
Rexroth IndraDrive C 驱动控制器Bb 准备信号的运行
11
数字输入 E1 ... E3
数字输入 E1
数字输入 E2..E7
12
数字输出 E/A8 ... E/A11
13
SERCOS 接口 (X20, X21)
通过控制面板或者串型接口X2,你能设置数据速率和传输功率光缆 驱动控制器通过光缆连接到上位控制单元
en(v) Sp(n) Pv(n) 误 差 设定值 反馈值
2
1.1 型号名牌
每个 驱动器由一个型号名称来识别 . 所有的单元都附上一个型号名牌,包括电机 .
1: 功率部分型号名牌 2: 控制部分型名牌
3
4
5
6
X2
编码器 采用12V 电源的控制电压: • 1 Vpp with reference track • 1 Vpp with HIPERFACE® • IndraDyn ( MSK 电机的编码器接口)
sp(n) -
ev(n)
控制器
mv(n)
D-A
mv(t)
执行机构
被控对象
c(t)
pv(n) PLC
A-D
pv(t)
测量与变送元件
PLC模拟闭环系统
PID(Proportional Integral Differential)控制即反馈控制,根据误差进行控制: 输入:控制偏差
• • •
ev(n)=sp(n)-pv(n)
10
1 X31 X32 继电器 Rel1 Rel1
2 Rel2
3
4
5 E3(DI) E7(DI)
6 E4(DI) E(A8) DI/DO
7 E5(DI) E(A9) DI/DO
8 24V E(A10) DI/DO
9 0V
E1(DI) E2(DI) E6(DI)
弹簧力卡紧
有关连接看固化软件的参数描述(参 数 P-0-0300).
16
谢谢! Thanks
17