室内地图制作流程
如何进行室内空间测绘和室内地图的绘制
如何进行室内空间测绘和室内地图的绘制室内空间测绘和室内地图的绘制在如今的建筑、室内设计和导航等领域中起着重要的作用。
它能够帮助我们更好地理解和规划室内空间,提供准确的导航信息,提高工作效率和用户体验。
下面将介绍如何进行室内空间测绘和室内地图的绘制。
一、选择合适的测绘工具在进行室内空间测绘和室内地图的绘制之前,我们需要选择合适的测绘工具。
常见的工具有激光测距仪、全站仪、测绘仪等。
激光测距仪可用于测量室内空间的尺寸和距离,全站仪可以进行室内空间的三维测量和建模,而测绘仪可以进行室内地图的采集和记录。
二、制定测绘计划在进行室内空间测绘和室内地图的绘制之前,我们需要制定测绘计划。
首先需要确定需要绘制地图的区域范围和目的,例如是绘制整个建筑物的室内地图,还是仅绘制特定房间的地图。
其次需要考虑测绘的精度和准确度要求,这将决定测绘工具的选择和测量方法。
最后需要确定测绘的时间和人力预算,确保能够按时完成测绘任务。
三、进行室内空间测绘在制定好测绘计划后,我们可以开始进行室内空间测绘。
首先需要对测绘区域进行准备,清理杂物和障碍物,以确保能够顺利进行测量。
接下来可以利用激光测距仪等工具进行尺寸和距离的测量,记录下测量结果。
如果需要进行三维测量和建模,可以使用全站仪来进行。
通过多次测量和数据处理,最终得到室内空间的准确测量数据。
四、绘制室内地图在进行室内空间测绘之后,我们可以开始绘制室内地图。
首先需要将测量数据进行整理和处理,去除噪声和错误数据,确保数据的准确性。
接下来可以利用绘图软件进行室内地图的绘制。
绘制时需要根据测量数据绘制出房间的尺寸、墙壁的位置和门窗的位置,以及其他特征物体的位置。
同时需要标注出重要的位置和区域,例如卫生间、楼梯和会议室等。
最后可以添加文字和符号等,增加地图的可读性和使用性。
五、更新和维护室内地图一旦完成室内地图的绘制,我们需要定期更新和维护地图。
在建筑物发生改变或者新的特征物体出现时,需要及时更新地图,确保地图的准确性。
室内测量与室内地图制作的方法与流程

室内测量与室内地图制作的方法与流程现代社会对于室内环境的需求越来越高,迫切需要准确的室内地图来提供室内导航和定位服务。
因此,室内测量与室内地图制作成为当下研究的热点之一。
本文将介绍室内测量和室内地图制作的方法与流程。
一、室内测量方法想要制作准确的室内地图,首先需要进行室内测量。
室内测量有多种方法,常见的包括激光测距仪、全站仪和摄影测量等。
激光测距仪是一种高效且精确的室内测量工具。
通过发射激光束并测量其回程时间,可以得出目标物体与测量仪之间的距离。
通过多次测量,可以获得室内各个位置的坐标信息,从而构建室内地图。
全站仪与激光测距仪类似,但它可以实现更精确的室内测量。
通过发射红外线并测量其反射时间,全站仪可以准确测量目标物体的水平和垂直角度,并计算出目标物体的坐标信息。
此外,摄影测量也是室内测量的一种常见方法。
通过摄影设备拍摄室内环境的照片,然后利用特定软件进行图像处理,通过图像匹配和测量技术,可以得到室内各个位置的坐标信息,进而制作室内地图。
二、室内地图制作流程在完成室内测量之后,接下来就是室内地图制作的流程。
室内地图制作的流程包括数据处理、地图绘制和地图更新三个阶段。
数据处理是室内地图制作的第一步。
将测量得到的数据进行整理和处理,去除冗余和噪声,保留准确的数据。
然后,将数据进行格式化,使之符合地图绘制的要求。
地图绘制是室内地图制作的核心环节。
在进行地图绘制之前,需要确定地图的比例尺和坐标系统。
根据测量数据,绘制室内地图的基础框架,包括建筑物的外部轮廓、房间的分布以及房间内的重要设施和设备等。
同时,根据实际需要,可以添加一些额外的功能,如导航路径、标记点等。
地图更新是室内地图制作的持续性工作。
由于室内环境的不断变化,室内地图需要及时进行更新。
通过定期进行室内测量和数据处理,可以保证地图的准确性和时效性。
同时,根据用户的需求和反馈,也可以对地图进行改进和优化。
三、室内测量与地图制作的应用室内测量与地图制作在各个领域都有广泛的应用。
如何制作好看的室内地图-室内电子地图-室内地图制作
如何制作好看的室内地图-室内电子地图-室内地图制作随着我国经济的飞速发展,室内地图定位必将是GIS发展的一大趋势,应运而生。
纵观当前GIS领域的发展状况,室外地图相关的产品比较成熟,像百度、google、arcgis等都是在GIS领域很具有代表性的,但是个性化室内地图却微乎其微,深圳市易景空间地图专业致力于室内地图平台的研究,如何制作个性化效果好看的室内地图就如同一个刚出生的婴儿,但它的前途却是注定非凡。
室内GIS平台底层架构基于传统GIS平台,根据室内地图和室内定位的特点,在坐标体系和功能定义方面进行有针对性的扩展开发,形成专业的室内地理信息系统引擎。
深圳市易景空间三维地图制作平台定义了包含网格结构的室内地理坐标系,融合集成了CAD、arcgis、3dmax三维模型等各种地图数据格式,生成的室内电子地图,可以开发室内跨楼层导航、消防逃通道生分析、室内平滑定位轨迹等特有专业功能;并基于海量空间轨迹聚合技术,利用独立值撒点图、热力图等专题地图对人流行为等海量位置数据进行大数据分析,从而为政府公共安全、商业智能、商场O2O、LBS分析等业务应用领域提供全新的强有力的平台支撑。
易景空间三维地图制作平台中的模型库功能,可以为用户提供丰富的模型支持,基于使用场景分为室内、室外、生活、交通、行业细分等七大类,覆盖用户绘制地图时的常用场景及常用模型类型。
模型种类及数量还会进行持续的更新丰富。
制作智慧商业办公楼、写字楼风格室内电子地图我们为大型企业办公楼、不同规模公司办公区提供各具特色的三维室内地图,方便的进行OA系统、门禁系统、人员管理、设备管理、体验区等系统集成和可视化管理。
制作智慧机房场景室内电子地图依托机房环境的多源传感器设备、三维可视化地图、精细化设备模型,打造可视化的智慧机房“数字孪生”平台,实现智慧机房运行管控新方式。
制作智慧医院导航室内电子地图医院室内地图提供大众就医关注的挂号区、分诊区、就医区、检验区完整划分和展现,精确提示各种路线指引,更可以对接HIS系统提供可视化就医服务。
面向栅格模型的室内环境地图构建方法

面向栅格模型的室内环境地图构建方法朱涛;黎恒明;唐新科;尚大帅【摘要】针对室内未知环境地图构建问题,通过Kinect传感器获取障碍物深度图像信息,采用基于Bayesian的概率栅格计算方法,实现室内环境下的实时地图构建,并通过移动机器人平台验证其有效性和准确性.【期刊名称】《现代计算机(专业版)》【年(卷),期】2017(000)029【总页数】4页(P74-77)【关键词】栅格模型;地图构建;栅格地图;Kinect【作者】朱涛;黎恒明;唐新科;尚大帅【作者单位】西安测绘总站,西安 710054;西安测绘总站,西安 710054;西安测绘总站,西安 710054;西安测绘总站,西安 710054【正文语种】中文针对室内未知环境地图构建问题,通过Kinect传感器获取障碍物深度图像信息,采用基于Bayesian的概率栅格计算方法,实现室内环境下的实时地图构建,并通过移动机器人平台验证其有效性和准确性。
随着人工智能技术日趋成熟,机器人得到越来越广泛应用。
移动机器人在未知环境中自主完成任务,需要不断感知周围的环境信息,进行定位、避障和路径规划,从而到达目标位置[1]。
然而在室内未知环境中,移动机器人无法直接获取GPS等位置信息进行定位导航,需要借助传感器建立外部空间的空间模型,即地图构建[2]。
本文针对室内未知环境地图构建问题,通过在移动机器人平台上搭载Kinect传感器,采用面向栅格模型的地图构建方法有效解决了信息不确定性问题,对室内工作环境进行准确描述和表达。
概率栅格地图的建立是根据测距传感器的观测值来计算每个栅格被占据的概率值得到的[3]。
由于移动机器人地图创建存在传感器噪声、定位精度、累积误差等不确定性因素,这些不确定性因素复杂且难以处理,需要用概率来表示栅格地图中每个栅格被障碍物占据的可能性,建立明确的概率算法模型来解决问题。
定义栅格单元是一个在连续空间坐标集合的离散状态随机过程,每个栅格单元具有占据和空闲的离散随机变量。
室内导航定位软件开发的设计与实现

室内导航定位软件开发的设计与实现摘要:随着室内空间的复杂化和人们对于室内导航需求的增加,室内导航定位软件逐渐成为解决室内定位问题的有效方式。
本文旨在介绍室内导航定位软件开发的设计与实现,包括室内地图采集与构建、定位算法选择与优化、用户交互界面设计以及导航功能的实现等方面。
希望通过本文的介绍,能够为室内导航定位软件开发者提供一些指导和启示。
1. 引言室内导航定位软件作为一种解决室内定位需求的工具,可以帮助用户在室内环境中准确快捷地导航到目的地。
相比于传统的地图导航软件,室内导航定位软件面临着更大的挑战,因为室内空间常常存在复杂的结构、多个楼层以及信号受限等问题。
因此,在设计与实现室内导航定位软件时,需要考虑到这些特殊情况。
2. 室内地图采集与构建为了实现室内导航定位功能,首先需要采集并构建室内地图。
室内地图的采集可以通过多种技术手段实现,如使用激光测距仪进行室内空间扫描、通过图像处理识别建筑物特征等。
采集到的数据需要进行处理和整合,生成室内地图。
地图的构建还需要考虑室内空间的结构特点,如楼层间的通道、楼梯、电梯等。
3. 定位算法选择与优化在实现室内导航定位功能时,选择合适的定位算法至关重要。
常见的室内定位算法包括基于WiFi信号强度的定位、基于蓝牙信号的定位、基于惯性传感器的定位等。
这些算法各有优劣,需要根据实际情况进行选择和优化。
例如,对于信号受限的室内环境,可以考虑融合多个定位技术来提高定位的准确性。
4. 用户交互界面设计室内导航定位软件的用户交互界面设计直接影响用户体验和软件的易用性。
设计时应考虑到用户在使用室内导航时的特殊需求。
例如,地图界面需要清晰明了,显示室内结构和路径规划信息;导航操作需要简单明确,方便用户快速找到目的地。
此外,还可以考虑增加语音导航、实时路况信息等功能,提供更好的导航体验。
5. 导航功能的实现室内导航定位软件的核心功能是路径规划和导航指引。
路径规划需要考虑到室内环境的复杂性和多样性,通过算法计算出最佳路径。
室内地图课件
引擎,可实现在线、离线定位和导航功能
• 涵盖商场内全部的公共设施、商家信息、打着促销等,提 高用户体验度,增加用户黏度
• 功能强大的BI数据分析平台,提供基于客流的各种分析报 告。
• 提取、分析用户基本资料,为商家精准推送广告。
图聚(Palmap+) 是全球最大的室内地图服务商,始终致 力于提供购物餐饮、休闲娱乐、交通设施、医疗教育等多 种大型场所的室内地图服务,力求打造吃喝玩乐、衣食住 行全方位城市生活指南,为中国的移动互联网用户带来时 尚便利的高品质生活。
Palmap+ 室内地图在全国的分布状况
5.图聚简介(palmap+)
5.图聚简介(palmap+)
它有自己的一套应对不同场景的解决方案
6.个人关于室内地图的思考
(1)室内地图数据估计为100~10000倍于室外地图数 据,数据量太大,对于移动终端的手机来说,这是一个 比较的负担,室内三维地图的制图综合就成了一个难点
(2)是否可以通过手机拍照的方式,确定目前所处的 位置。
产生背景:
图渊(palmap)、街景、 移动终端的LBS服务
2.室内地图的核心思想
重新定义“地图” 超精细+实时 开放平台 位置改变服务!
3.室内地图的制作
图聚公司(palmap+)提供以下2种开发模式
(1)SDK
– Palmap+为第三方开发者提供完整的室内地图开发包(SDK) ,包括地图渲染、店铺信息、优惠信息、定位于导航等功能, 开发者可轻松创建属于自己的室内地图应用。
纲要
室内ATU地图制作流程
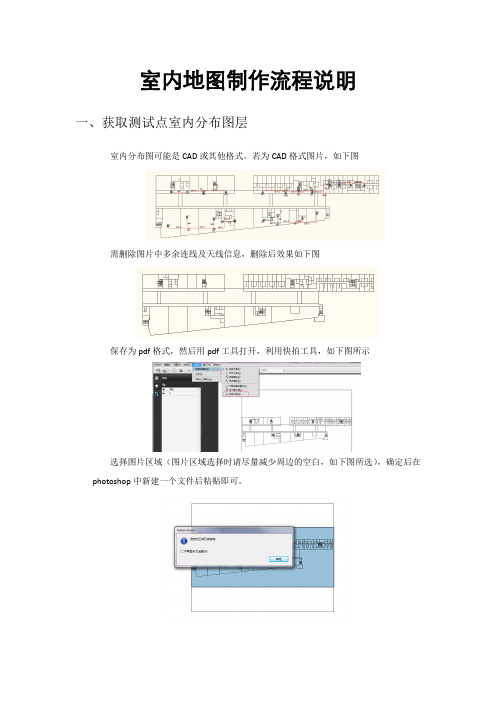
室内地图制作流程说明一、获取测试点室内分布图层室内分布图可能是CAD或其他格式。
若为CAD格式图片,如下图需删除图片中多余连线及天线信息,删除后效果如下图保存为pdf格式,然后用pdf工具打开,利用快拍工具,如下图所示选择图片区域(图片区域选择时请尽量减少周边的空白,如下图所选),确定后在photoshop中新建一个文件后粘贴即可。
二、调整室内分布图角度,转换图片部分室内分布图可能不是正南正北,需要用photoshop工具将其调整一定角度,调整到正确的方向,使其和google earth上的方向保持一致。
最后将图层转化成JPG 格式(像素在1080*800以上,文件大小在100K左右)。
记录好JPG图片的像素。
例如:三、图片名称图片名称格式:025#001#JLHY#FU#03#03.jpg025:区号001:1号网格(建筑在网格外则写999)JLHY:金陵会议的缩写(大写)FU:地上(地下为FD)03#03:3层(起始和结束楼层)注意图片名称中的“#”。
四、选择必测、可选点、校准点在图片上用红色圆点标注必测点,蓝色点标注可选点,绿色的为校准点。
五、在google earth上获取三个点的经纬度1、打开google earth,找到所需要的测试点建筑。
在建筑的边角上选取3个较为明显的点,获取其经纬度信息。
注意:三点的分布要分散,最后的结果误差才会小。
2、获取3个点的经纬度完成后,如格式不是度,请在工具>选项界面中设置为‘度’:3、如果在google earth无法找到相应的测试点建筑,需要采用高精度GPS定位设备测量建筑物外墙顶点位置的经纬度(需要跟。
六、Mapinfo矢量化图片1、使用mapinfo打开图片,文件类型选择“栅格图像”,选中图片:2、点击“配准”:3、点击“增加”,选中在google earth上选中的3个点的位置,在X、Y处将转化好的经纬度填上。
如下图:4、点击“确定”,会有在改点处显示。
室内导航方案

室内导航方案第1篇室内导航方案一、项目背景随着我国城市化进程的加快,大型公共建筑及商业综合体日益增多,室内空间结构复杂,给人们在室内导航带来了诸多不便。
为了提高室内导航的准确性和便捷性,本项目将制定一套合法合规的室内导航方案,旨在满足各类场景下的室内定位与导航需求。
二、方案目标1. 提高室内导航的准确性,确保用户在复杂室内环境中能够准确找到目的地。
2. 简化导航操作,提高用户体验。
3. 遵循国家相关法律法规,确保方案合法合规。
4. 降低系统建设和运维成本,提高投资回报率。
三、技术路线1. 室内定位技术:采用蓝牙低功耗(BLE)技术、超宽带(UWB)技术、室内GPS技术等多种定位技术相结合,提高室内定位的准确性。
2. 导航算法:结合室内空间结构特点,优化路径规划算法,实现短距离、低成本的室内导航。
3. 数据采集与处理:利用激光扫描、无人机航拍等技术,对室内空间进行三维建模,为导航提供数据支持。
4. 云计算与大数据:利用云计算平台,实现室内导航数据的存储、处理和分析,提高导航系统的实时性和准确性。
四、实施方案1. 室内定位系统部署(1)在室内空间安装蓝牙信标、UWB基站等定位设备,实现室内定位信号的覆盖。
(2)通过定位算法,实时获取用户位置信息。
(3)将定位数据传输至云端,为导航算法提供数据支持。
2. 导航算法优化(1)根据室内空间结构,设计合适的路径规划算法。
(2)结合用户行为习惯,优化导航指令,提高导航准确性和便捷性。
3. 数据采集与处理(1)利用激光扫描、无人机航拍等技术,对室内空间进行三维建模。
(2)对采集到的数据进行处理,生成室内地图,为导航提供数据支持。
4. 系统集成与测试(1)将室内定位、导航算法、数据采集与处理等技术进行集成。
(2)开展系统测试,确保导航系统的稳定性和准确性。
五、合法合规性保障1. 遵循国家相关法律法规,确保方案在法律框架内实施。
2. 加强数据安全管理,保护用户隐私。
google室内地图计划生成器

google室内地图计划生成器Google室内地图计划生成器。
在当今数字化时代,室内地图的需求日益增加。
随着人们对室内定位和导航的需求不断增长,室内地图已经成为了商业建筑、购物中心、机场、医院等场所必不可少的一部分。
而Google室内地图计划生成器的出现,为室内地图的创建提供了更加便捷、高效的方式。
一、Google室内地图计划生成器的基本原理。
Google室内地图计划生成器是基于Google地图平台的室内地图创建工具,它利用室内定位技术和三维建模技术,能够对建筑物内部的结构进行精确的测绘和建模。
通过手机、平板等移动设备,用户可以在室内地图上实现定位和导航,极大地方便了人们在室内环境中的定位和导航需求。
二、Google室内地图计划生成器的优势。
1. 高效快捷,Google室内地图计划生成器可以快速、准确地对建筑物内部的结构进行测绘和建模,大大节省了创建室内地图的时间和人力成本。
2. 精准定位,利用室内定位技术,Google室内地图可以实现对用户在室内的精准定位,帮助用户快速找到目的地。
3. 三维展示,Google室内地图计划生成器可以生成逼真的三维室内地图,用户可以通过旋转、缩放等操作,更加直观地了解建筑物内部的结构。
4. 多平台适配,Google室内地图可以在多种设备上进行展示和使用,包括手机、平板、电脑等,用户可以随时随地进行室内导航。
5. 灵活定制,Google室内地图计划生成器支持对室内地图进行个性化定制,用户可以根据自己的需求对地图进行标注、添加导航路径等操作。
三、Google室内地图计划生成器的应用场景。
1. 商业建筑,商场、超市、办公楼等商业建筑可以利用Google室内地图来提供更加便捷的导航服务,帮助顾客快速找到目标店铺或办公室。
2. 交通枢纽,机场、火车站、地铁站等交通枢纽可以利用Google室内地图来引导旅客快速找到登机口、候车室等目的地。
3. 医疗机构,医院、诊所等医疗机构可以利用Google室内地图来帮助患者和访客快速找到各个科室和诊室。
如何进行室内测绘和室内地图制作
如何进行室内测绘和室内地图制作如何进行室内测绘与室内地图制作室内测绘和室内地图制作是在建筑、设计和管控领域中不可或缺的重要工作。
随着科技的不断发展,现代测绘和地图制作已经不再局限于室外空间,而是延伸到了室内环境。
本文将探讨室内测绘和室内地图制作的方法、工具以及应用,并介绍如何利用室内地图提升管理和用户体验。
一、室内测绘的方法1. 激光扫描技术激光扫描技术是室内测绘的重要手段之一。
通过将激光束发送到室内空间,并接收反射回来的激光,测绘仪器可以精确地获取室内空间的三维数据。
这种方法可以快速高效地完成测绘任务,尤其适用于大型建筑或复杂的室内环境。
2. 视觉测量技术视觉测量技术是通过相机或摄像头捕捉室内环境的图像,并利用计算机视觉算法对图像进行处理和分析,从而获得室内空间的相关参数和信息。
这种方法简单易用,成本相对较低,适合于室内小范围或个别区域的测绘任务。
二、室内地图制作的工具1. CAD软件计算机辅助设计(CAD)软件是室内地图制作的基本工具之一。
CAD软件提供了丰富的绘图和编辑功能,可以用于绘制建筑物的平面图、立面图和剖面图等,从而构建室内地图的基本框架。
2. GIS软件地理信息系统(GIS)软件可以将室内地图的位置信息与其他数据进行整合,实现空间数据的管理和分析。
GIS软件可以帮助用户在室内地图中添加地理坐标、导航路径、设备信息等,提升地图的实用性和功能性。
三、室内地图的应用1. 管理指导室内地图是管理工作的重要辅助工具。
通过室内地图,管理人员可以清晰地了解建筑物的布局、楼层分布和区域划分,从而更好地进行设备管理、人员调度和资源优化。
2. 室内导航随着商场、医院、机场等室内空间的不断扩大和复杂化,室内导航成为了人们在室内环境中的重要需求。
利用室内地图和导航技术,用户可以快速准确地找到目标位置,提升室内旅行的便捷性和效率。
3. 虚拟现实体验室内地图也可以与虚拟现实技术相结合,实现沉浸式的室内体验。
幼儿园手绘地图制作方法
幼儿园手绘地图制作方法幼儿园手绘地图是一种将学习与创造结合起来的有趣活动,它可以帮助幼儿了解他们周围的环境,并提升他们的空间认知能力。
制作幼儿园手绘地图需要一些准备工作和技巧,下面将详细介绍制作幼儿园手绘地图的方法。
准备工作:1. 找到地图的材料:首先,需要准备一块大的纸张,如卡纸或绘图纸。
另外,还需要彩色铅笔、蜡笔、彩色纸、剪刀、胶水等绘画工具。
2. 确定地图的主题和目的:在制作地图之前,需要确定地图的主题和目的。
例如,是制作幼儿园的室内地图还是室外地图?地图的目的是帮助幼儿熟悉幼儿园的不同区域或是其他目的?3. 收集相关资料和图片:为了更好地表达地图的内容,可以收集一些相关的资料和图片,如幼儿园平面图、照片或图画等。
制作步骤:1. 绘制地图的轮廓:首先,将准备好的大纸铺在桌子上,根据幼儿园的布局和大小,用铅笔轻轻地绘制出地图的轮廓。
可以参考收集到的资料和图片,确保地图的比例和布局准确。
2. 标注地图的要素:根据幼儿园的实际情况,标注出地图的要素,如教室、卫生间、图书馆、游戏区、操场等。
可以用彩色铅笔或蜡笔来表示不同的要素,以便幼儿更好地辨认。
3. 添加细节和装饰:为了使地图更加生动和有趣,可以在地图上添加一些细节和装饰,如花草、树木、小动物等。
可以用彩色纸剪出一些形状,然后用胶水粘贴到地图上。
4. 添加文字说明和箭头:为了帮助幼儿更好地理解地图,可以在地图上添加一些文字说明和箭头。
例如,用文字说明教室是什么颜色的、用箭头指示卫生间的位置等。
5. 添加标尺和比例尺:为了让地图更加准确和实用,可以在地图的边缘添加标尺和比例尺。
这样可以帮助幼儿在地图上找到各个区域的位置,并提升他们的空间认知能力。
6. 进行调整和修饰:完成地图之后,需要进行一些调整和修饰工作。
可以检查地图上的标注是否准确,细节是否清晰,如果需要,可以再次涂改或添加一些细节。
7. 展示和分享:最后,将制作好的地图展示在幼儿园的合适位置上,供幼儿观看和学习。
室内定位技术的设计与实现

室内定位技术的设计与实现近年来,随着科技的不断进步,室内定位技术也逐渐得到了广泛的应用。
目前,室内定位技术已经被广泛应用于商场、医院、机场、地铁等公共场所的导航、定位服务,甚至在工业制造领域也起到了很重要的作用。
然而,要达到高精度、高可靠性的室内定位,需要深入研究室内定位技术的设计和实现。
一、定位技术的选择室内定位技术主要包括:无线电定位技术、声波定位技术、视觉定位技术、地磁定位技术、惯性导航技术等。
在这些技术中,无线电定位技术应用最为广泛。
其中,Wi-Fi定位技术、蓝牙低功耗(BLE)定位技术和超宽带(UWB)定位技术的应用性能得到了认可并且得到了广泛应用。
二、室内地图及预处理定位技术在室内中需要用到室内地图,以便在定位时提供参考。
因此,在实际应用中,需要采集室内地图及建立室内地图的数据库,包括建筑物的平面图、高度图、墙面材质、门窗和家具等地面物体的布局。
同时,对采集的数据进行预处理,如建立坐标系、进行坐标校准,以保证数据的质量。
三、无线电信号的采集和处理在无线电定位技术中,需要采集和处理Wi-Fi、BLE和UWB等无线电信号。
对于Wi-Fi和BLE定位技术,可使用普通的手机或其他设备来采集和处理信号,并通过采集的信号信息来实现定位。
而对于UWB定位技术,需要专门的硬件设备来进行采集和处理。
四、室内定位算法的设计室内定位算法是实现室内定位的核心。
目前主要的定位算法包括基于场强定位算法、基于指纹定位算法、基于混合定位算法等。
其中,基于场强定位算法和基于指纹定位算法已经得到广泛的应用。
在基于场强定位算法中,室内定位是通过分析接收到的无线信号强度与距离的关系来确定目标的位置。
而在基于指纹定位算法中,首先需要采集大量的参考点实际测量数据,在此基础上对目标位置进行匹配和定位。
五、定位系统的部署与测试在室内定位系统的部署中,需要对采集到的数据进行实时处理,并提供精确的定位信息。
在系统部署后,需要进行定位系统的测试,并在不同场景下对系统的准确性、稳定性进行评价。
室内平面地图的生成方法及装置、清扫地图的生成方法[发明专利]
![室内平面地图的生成方法及装置、清扫地图的生成方法[发明专利]](https://img.taocdn.com/s3/m/c4b5256fd0d233d4b04e690c.png)
专利名称:室内平面地图的生成方法及装置、清扫地图的生成方法
专利类型:发明专利
发明人:张志瑜
申请号:CN201911389687.1
申请日:20191230
公开号:CN111127648A
公开日:
20200508
专利内容由知识产权出版社提供
摘要:本发明的实施方式提供了室内平面地图的生成方法及装置、清扫地图的生成方法。
室内平面地图的生成方法包括:获取室内空间的户型图平面图片;获取所述户型图平面图片对应的第一户型图;接收针对所述第一户型图的修改请求;根据所述修改请求对所述第一户型图进行修改,得到第二户型图;根据所述第二户型图生成室内平面地图;将所述室内平面地图发送至扫地机器人,供所述扫地机器人生成在清扫过程中使用的清扫地图。
本发明实施例能够提高室内平面地图的生成效率。
申请人:杭州网易再顾科技有限公司
地址:310052 浙江省杭州市滨江区长河街道网商路599号4幢411室
国籍:CN
代理机构:北京市铸成律师事务所
更多信息请下载全文后查看。
RPG游戏制作教程

项目一默认素材使用教程任务1 认识RPG与RPG Maker XP1.RPG简述RPG,即角色扮演游戏(英文全称是Role-playing game),是一种游戏。
在游戏中,玩家扮演虚拟世界中的一个或者几个特定角色在特定场景下进行游戏。
角色根据不同的游戏情节和统计数据(例如力量、灵敏度、智力、魔法等)具有不同的能力,而这些属性会根据游戏规则在游戏情节中改变。
有些游戏的系统可以根据此而改进。
玩家需扮演游戏中的主角(可以不止一个人)在游戏。
在所给定的世界里进行漫游、冒险;他可以购买物品、装备来使自己与自己的队伍更为强大;与游戏中的敌人进行战斗,从而获得金钱与能使自己升级的经验值;通过对话、调查等行为来完成游戏中的剧情。
由于角色扮演游戏可以使玩家扮演与其本人截然不同的人物;可以满足玩家成为世界上(当然是指游戏中的世界)最强大的人、最伟大的英雄的欲望;而亲身体验跌宕起伏的剧情又能使玩者如同看一本小说一般,与游戏中的人物同喜同悲。
这些恐怕也就是角色扮演游戏里最有趣最吸引人的地方。
《仙剑奇侠传》游戏截图1 《仙剑奇侠传》游戏截图2《天之痕》游戏截图1 《天之痕》游戏截图22.RPG要素(1)剧情剧情的好坏直接影响到玩家对游戏的感觉。
不论是武侠RPG的煽情路线,还是日式RPG 的一主线多分支模式,或者是欧美RPG开放式剧情模式,讲故事永远是不变的主题。
角色,即玩家扮演的人物。
这一要素及包容在剧情中,也游离于剧情之外,可以说是相辅相成的两大要素。
《仙剑》之所以感人,优秀的剧情和突出的角色缺一不可。
(2)画面好花还需绿叶配。
好的剧情也需要好的画面,随着动画技术的提高以及玩家口味的挑剔,再好的剧情配上几十年前超烂的画面,也足够让所有人倒胃的了。
(3)战斗系统资格老点的玩家一定还记得《风云》中三步一岗,五步一雷的迷宫,《神雕侠侣》(2D)中冗长的战斗。
战斗系统也决定着玩家对这个游戏的耐心。
(4)升级以及技能、物品疯狂升级才能对付越来越变态的BOSS,合理运用技能和物品,才能更有效的杀敌升级。
如何使用测绘技术制作室内地图和平面布局图
如何使用测绘技术制作室内地图和平面布局图引言:随着现代建筑结构和室内设计的多样化,室内地图和平面布局图成为了许多场合必备的工具。
测绘技术在制作室内地图和平面布局图方面起到了至关重要的作用。
本文将探讨如何使用测绘技术制作精确、准确的室内地图和平面布局图。
第一部分 - 测绘技术概览:测绘技术是一门应用科学,通过使用测量工具和方法来记录、分析、处理地理数据。
室内测绘是测绘技术的一个分支,主要用于室内空间的测量和绘制。
在制作室内地图和平面布局图时,我们可以利用各种测绘技术,如全站仪、激光测距仪和平面摄影等。
第二部分 - 数据采集:制作室内地图和平面布局图的第一步是进行数据采集。
首先要测量室内空间的尺寸,包括墙壁长度、房间宽度和高度等。
这可以通过使用全站仪进行角度和距离测量来完成。
全站仪是通过射击激光束来测量角度和距离的仪器,它可以提供非常准确的测量结果。
此外,为了获取更准确的数据,还可以使用激光测距仪等其他测量工具。
第三部分 - 数据处理与绘图:一旦完成数据采集,接下来就需要对数据进行处理和绘图。
数据处理包括将测量结果转化为可用的绘图数据。
这可以通过使用计算机辅助设计软件(CAD)来完成。
CAD软件可以将测量数据导入,并根据测量结果自动生成室内地图和平面布局图。
在绘制过程中,可以添加标签、符号和图例等来增强可读性和信息传达。
第四部分 - 地图设计考虑因素:在制作室内地图和平面布局图时,还需要考虑一些重要的因素,以确保地图的准确性和实用性。
首先是比例尺,在绘制地图时,需要选择适当的比例尺,使地图尺寸与实际空间相符。
其次,要考虑地图的方位角,以确定正确的方向。
还可以添加磁北线和指南针来帮助观察者确定地图的方向。
第五部分 - 应用和案例:室内地图和平面布局图在许多领域都有广泛的应用。
例如,在商业场所,如购物中心和大型超市,室内地图可以帮助顾客快速找到目标店铺。
在医院和学校等公共场所,室内地图可以帮助人们找到目标办公室或教室。
基于激光测距的室内平面地图制图方法[发明专利]
![基于激光测距的室内平面地图制图方法[发明专利]](https://img.taocdn.com/s3/m/97fca14ef524ccbff02184c8.png)
专利名称:基于激光测距的室内平面地图制图方法专利类型:发明专利
发明人:唐健,陈育伟
申请号:CN201510295778.4
申请日:20150602
公开号:CN104897161A
公开日:
20150909
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于激光测距的室内平面地图制图方法,包括步骤:步骤1,移动传感器平台采集室内环境数据;步骤2,创建多分辨率的栅格相似度地图;步骤3,结合室内环境数据和栅格相似度地图,获得各历元下传感器平台最佳的位置和姿态;步骤4,根据最佳的位置和姿态更新栅格相似度地图;步骤5,在本地坐标系下到导出栅格相似度地图。
本发明数据采集操作简单,且无需预先了解环境空间结构;成本低廉,成图速度快,可实现室内地图的多次和快速更新,有效解决室内制图的效率瓶颈问题。
申请人:武汉大学
地址:430072 湖北省武汉市武昌区珞珈山武汉大学
国籍:CN
代理机构:武汉科皓知识产权代理事务所(特殊普通合伙)
代理人:胡艳
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
室内地图制作流程说明
一、获取测试点室内分布图层
室内分布图可能是CAD或其他格式。
若为CAD格式图片,如下图
需删除图片中多余连线及天线信息,删除后效果如下图
保存为pdf格式,然后用pdf工具打开,利用快拍工具,如下图所示
选择图片区域(图片区域选择时请尽量减少周边的空白,如下图所选),确定后在photoshop中新建一个文件后粘贴即可。
二、调整室内分布图角度,转换图片
部分室内分布图可能不是正南正北,需要用photoshop工具将其调整一定角度,
调整到正确的方向,使其和google earth上的方向保持一致。
最后将图层转化成JPG 格式(像素在1080*800以上,文件大小在100K左右)。
记录好JPG图片的像素。
例如:
三、图片名称
图片名称格式:025#001#JLHY#FU#03#03.jpg
025:区号
001:1号网格(建筑在网格外则写999)
JLHY:金陵会议的缩写(大写)
FU:地上(地下为FD)
03#03:3层(起始和结束楼层)
注意图片名称中的“#”。
四、选择必测、可选点、校准点
在图片上用红色圆点标注必测点,蓝色点标注可选点,绿色的为校准点。
五、在googl e earth上获取三个点的经纬度
1、打开google earth,找到所需要的测试点建筑。
在建筑的边角上选取3个较为明
显的点,获取其经纬度信息。
注意:三点的分布要分散,最后的结果误差才会小。
2、获取3个点的经纬度完成后,如格式不是度,请在工具>选项界面中设置为‘度’:
3、如果在google earth无法找到相应的测试点建筑,需要采用高精度GPS定位设
备测量建筑物外墙顶点位置的经纬度(需要跟。
六、Mapinfo矢量化图片
1、使用mapinfo打开图片,文件类型选择“栅格图像”,选中图片:
2、点击“配准”:
3、点击“增加”,选中在google earth上选中的3个点的位置,在X、Y处将转化好的
经纬度填上。
如下图:
4、点击“确定”,会有在改点处显示。
如下图:
5、依次将另外2个点的信息填好,则该图片矢量化完成。
在同一级目录会生成一个TAB
文件。
TAB文件中,点击“地图”>“选项”>“光标位置”:
在图层范围移动鼠标,则左下角会显示经纬度的信息:
七、FP文件
首先fp文件名称跟图片的名称必须保持一致。
要有UE编辑器打开FP文件。
1、文件内容如下:
第一行:is 1 69
Is和1不用修改,“69”为图片的宽每1像素代表的距离,即图片右边长在mapinfo的距离(换算成毫米)/图片像素高度。
例如:
上图图片右边长使用标尺量出侧边距离为0.03013km=30130mm。
查看图片属性,得出像素高度为738。
则1像素代表的距离为30130/738=41。
第二行:1/1可不用修改
第三行:oa 官方地址
第四行:da 详细描述地址
第五行:Cgi:主控小区的CGI
第六行:kp me为必测点;kp oe为可选点。
从这行开始主要是关键点信息。
2、关键点的“SerialNum”编号规则如下:
关键点编号的第一位代表此关键点是否必测,如果为必测关键点则为“m”,如果为可选关键点则为“o”。
关键点编号的第二位代表此关键点的类型,其中“e”代表出入口类关键点,“r”代表边缘类关键点,“t”代表交通区域关键点,“c”代表公共功能区关键点,“p”代表私有功能区关键点。
关键点的第三、四两位为数字,代表此关键点的编号。
关键点的第五位为分隔符,使用英文的句点“#”。
关键点的第六位至第十一位为此关键点的适用楼层,开始楼层在前,结束楼层在后,其编码方式与下文的楼层信息编码一致,但中间没有“#”连接符。
描述文件中关键点的楼层不得超出此文件描述的楼层范围。
关键点编码示例
“me01#fu0101”代表必测的出入口类关键点,其适用楼层为地上一层
3、每个测试点的地图图片编号分为区域信息、测试点信息、楼层信息三个部分,每个地图图片相应的测试点描述文件使用与此图片相同的文件名。
区域信息以直接显示“当地区号+测试点归属网格”,例如北京的1号网格显示为“010#001”。
如果测试点在网格区域外,则统一编码“999”。
测试点信息显示“官方名称”的拼音首字母。
楼层信息显示“楼层区域+起始楼层+结束楼层”,楼层区域分为地上及地下,分别为“FU”和“FD”两个关键字,“起始楼层”为此图片可用的起始楼层,“结束楼层”为此图片可用的结束楼层。
编号信息的各个部分之间以“#”(下划线)相连接。
例如,为了表示北京023号网格,海兴大厦,地上一层的平面图,图片命名示例如下:
图片编号示例
010#023#HXDS#FU#01#01
每个测试点都有其测试点编码,测试点编码使用上文中地图图片编号的a、b两部分,例如北京023网格的海兴大厦的测试点编码即为“010#023#HXDS”
在上文的名称编码中,区号、网格编号、官方名称、楼层区域、起始楼层、结束楼层之间都使用英文的“#”号相连接。
亦即,在完整的名称编码中,一共五个连接符,其连接符皆为“#”。
以北京023网格海兴大厦为例,此大厦第三层至第十五层为统一结构,其图纸名为“010#023#HXDSA#FU#03#15.jpg”,其图纸如下:
图纸
这行为必测点1,第三位和第四位的数字1876487为图片关键点像素X和Y的坐标,可以使用windows自带画图工具或其他工具,鼠标指向图片上关键点的中心,查看坐标。
如
下图:
打开TAB文件,找到该必测点,查看经纬度信息,将其写在像素X、Y坐标后面。
依次将所有必测点和可选点的信息写入FP文件。
注意:文字中间为Tab键,并非空格键。
如:kp<TAB>me01#fu0303<TAB>1876<TAB>487<TAB>118.7045266<TAB>32.0132386
最后将文件后缀保存为.FP格式:如025#001#JLHY#FU#03#03.fp。
注意:fp文件格式保存为UTF-8,如图所示。
八、测试资源模板填写
测试资源模板分3个sheet页。
1、测试点信息
包含TESTPOINT_ID:测试点ID;
TESTPOINT_NAME:测试点名称
LT_LONGITUDE:测试入口左上角经度(入口点信息)
LT_LATITUDE:测试入口左上角纬度
GRID_ID:所属网格等信息。
其他参考测试规范以及模板填写即可。
获取测试入口信息的原则请参考下图的红点位置
黑色区域为图片信息,红色为选取的测试入口点。
2、测试图片信息
包含TESTPICTURE_ID:测试图片ID(一个测试点可能包含多张图片)
TESTPOINT_ID:测试点ID(和第一个sheet相同)
以及图片的左上角、左下角、右上角、右下角的经、纬度信息(在TAB图层里查看图片四角的经纬度)。
M_KEYPOINT_SUM:必测点个数
O_KEYPOINT_SUM:可选点个数
ACCURANCYPOINT_SUM:校准点个数.
获取图片四个角的经纬度信息可进行如下操作获取:
如下图,双击左侧的tab名称后,在出现的弹出框中点击红色框选中的图标,在最右侧出现的这个界面中调整contrast的比例来改变背景色。
这样更容易分清图片边界。
3、测试入口信息
TESTENTRANCE_ID:测试入口ID
TESTPOINT_ID:测试点ID
以及测试入口左上右下角经、纬度信息。
附:
详细内容参考CQT规范。
九、利用自编工具画图(后期可能会实现,则前面第七部分可以省略)
1.测试点生成工具
后期将测试点由工具自动生成,并且每个测试点之间的距离之差为经度5或纬度5
或经度纬度均差5,则可用工具执行。
在完成图片tab文件(导入地图并配准)后,通过点击“生成网格”按钮,从而生
成如下图所示的tab文件。