TOPCON数据处理软件说明书
South和Topcon全站仪使用说明
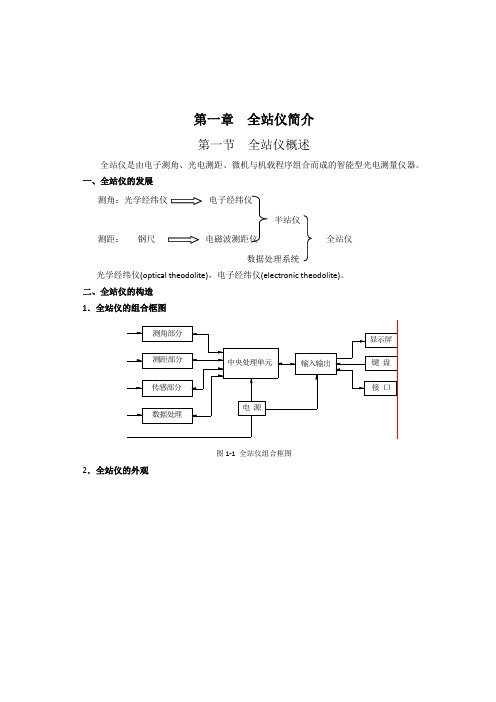
第一章 全站仪简介第一节 全站仪概述全站仪是由电子测角、光电测距、微机与机载程序组合而成的智能型光电测量仪器。
一、全站仪的发展测角:光学经纬仪电子经纬仪半站仪测距: 钢尺 电磁波测距仪 全站仪 数据处理系统光学经纬仪(optical theodolite),电子经纬仪(electronic theodolite)。
1 2图1-2 主流全站仪外观三、全站仪的功能介绍1.角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:(往往半个测回)瞄准A点——置零(0 SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(method of observation set)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET)。
2.距离测量(distance measurement)PSM、PPM的设置——测距、坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3.坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理图1-3 全站仪坐标测量原理图 图1-4 全站仪高程测量原理图平面坐标:若输入方位角SB α,测站坐标(S X ,s Y );测得:水平角β和平距st D 。
则有:方位角:βαα+=sb st 坐标:st st s t D X X αcos ⋅+= st st s t D Y Y αsin ⋅+= 高程:若输入测站S 高程S H ,测得仪器高i ,棱镜高v ,平距st D ,竖直角st θ,则有: 高程:v D i H H st st s t -⋅++=θtan(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为sb α——瞄准目标棱镜点T ,或输入后视点坐标来定向,按“测量”,即可显示点T 的三维坐标。
拓普康接收机及手薄常规操作

拓普康接收机及手薄常规操作gps培训TOPCON的GPS接收机及其日常操作一、接收机的常规操作和指示灯的判别Minter是TOPCON接收器的控制数据输入/输出和显示接口。
所有Hiper系列接收器都使用Minter。
电源键按电源键打开和关闭接收器。
状态(STAT)指示器当接收机在开机状态但没有跟踪到卫星时,stat指示灯闪红色。
跟踪并锁定卫星后,每个被跟踪卫星的stat指示灯将闪烁一次(绿色为GPS卫星,橙色为GLONASS卫星)。
重置键按住reset键约1秒将会引起:接收机的硬复位。
接收器从零功耗模式返回正常模式。
FN键和rec指示器按fn键小于1秒将使接收机在不同的信息模式(正常模式,扩展信息模式)间切换,或是在静态模式和动态模式间切换,这取决于接收机的设置。
按下FN键不到1秒时,rec指示灯将显示橙色。
按住FN键1至5秒,开始/停止数据记录。
数据记录期间,rec指示灯为绿色。
假如rec指示灯显示红色,则表明内存已经没有剩余空间了,或是存在硬件故障,当然也可能是oaf文件不合适。
每次数据写入接收器存储器时,接收器rec指示灯呈绿色闪烁。
按住fn键5至8秒,可将接收机a口的波特率设置为9600。
在按下fn键约5秒以后,rec指示灯将变成红色,要在rec指示灯为红色时释放fn键(接下来的3秒时间内)。
按住FN键8秒以上对接收器没有影响。
安装新的接收器固件程序或清除接收器的NVRAM后,接收器将自动检查其内部文件系统。
在此期间,rec指示灯以橙色闪烁,CDU应用软件(控制)无法显示接收器的文件系统gps培训显示单元)以访问或记录数据。
根据具体情况和内存大小,接收器可能需要几秒钟到几分钟的时间来检查文件系统。
电池指示器batt指示灯的颜色指示了hiper接收机内置电池充电的状况:绿色c表示已充电85%以上。
橙色c表示已充电至中等。
红色c表示已充电至15%以内。
电源的状态也可以通过电池指示灯的闪烁形式来指示:它始终处于C状态,外部电源用于供电,电池未充电。
托普康全站仪操作说明书-GTS-102N

初始化:内存初始化
坐标数据输入
放样点的坐标数据可以直接有键盘输入,并可存入内存中的一个文件内。
数据通讯
发送数据
数据通讯
接收数据
数据传输示例
棱镜常数设定
T-Байду номын сангаасOM简介
快捷按钮区 数据文本显示区
下载数据
下载数据
上传数据
上传数据
GTS-102N全站仪操作简介
CLICK HERE TO ADD A TITLE
北京中建华海测绘科技有限公司
演讲人姓名
基本构造
TOPCON GTS-102N
操作键及显示屏
角度测量模式
文本 文本
距离&坐标测量模式
角度测量
文本 文本 文本 文本
水平角设置和锁定
距离测量
当输入测量次数后,GTS-102N就将按设置的次数进行测量,并显示出距离平均值。当输入测量次数为1时,仪器不显示距离平均值。
测站点信息输入
利用内存中的坐标数据 直接键入坐标数据
测站点信息输入
直接键入坐标数据
后视点信息输入
后视点定向角可按以下 三种方法设定 用内存中的坐标数据设定 直接由键盘键入 直接键入设置定向角
放样步骤
实施放样有两种方法可供选择: 通过点号调用内存中的坐标数据 直接由键盘键入坐标数据
存储管理
查找:查看记录数据
坐标测量
测站点坐标设置
坐标测量
仪器高设置 棱镜高设置
坐标测量步骤
数据采集菜单操作
数据采集菜单浏览
数据采集文件选择
坐标文件选择
若需要调用坐标文件中的坐标数据作为测站点或后视点坐标,则预先应由数据菜单2/2选择一个文件。
topcon x25 控制面板 导航和自动驾驶 基础操作指南说明书

X25控制面板导航和自动驾驶基础操作指南拓佳丰圣(上海)科贸有限公司前言本手册提供了操作、维护T opcon 精准农业产品的信息。
正确地使用与维护对于设备操作的安全性、可靠性很重要。
在使用产品前认真阅读本手册非常重要。
本手册中的信息在当前是通用的,系统可能会稍有变化。
制造商保留重新设计、更改系统而不通知用户的权利。
条款和惯例注意:请认真阅读这些条款和惯例常规应用–您通过从T opcon Precision Agriculture (TPA)或T PA 的经销商购买产品,接受这些条款和惯例。
版权–本手册中的所有信息是T PA 的知识财产,并受知识产权保护。
TPA 保留所有的权利。
如果没有T PA 明确的书面同意,手册中的信息就只能用来保养和操作设备,不得使用、获取、复制、存储、展示、制作相似的产品、销售、修改、出版、发布或允许第三方获取本文档中的图像、内容、信息和数据。
本手册中的信息和数据T PA 的有较高价值的财产,花费了相当多的工作量,时间,和金钱,由T PA 进行初期选择、调节和安排的结果。
商标– ZYNX, PROSTEER, EAGLE, KEE Technologies, Topcon, Topcon PositioningSystems 和T opcon Precision Agriculture 是T opcon 的商标或T opcon 集团注册的商标。
Microsoft 和W indows 是微软公司在美国和其他国家的商标或注册商标。
本文中提到的产品和公司名称可能是它们各自所有者的商标。
网站和其他声明–TPA 的网站,其他Topcon 集团公司,其他的广告宣传,TPA 文献,TPA 的员工或独立联系人都没有更改这些条款和惯例的声明。
重要:安全–不恰当地使用本产品可能会导致产品故障、财产的损失甚至是人员伤亡。
产品只能由授权的T PA 服务中心进行维修。
您应当密切地回顾安全警告和指示,以便在本手册指导下恰当地使用本产品,在每次的使用中都应当如此。
拓普康 仪器数据传输及其转换
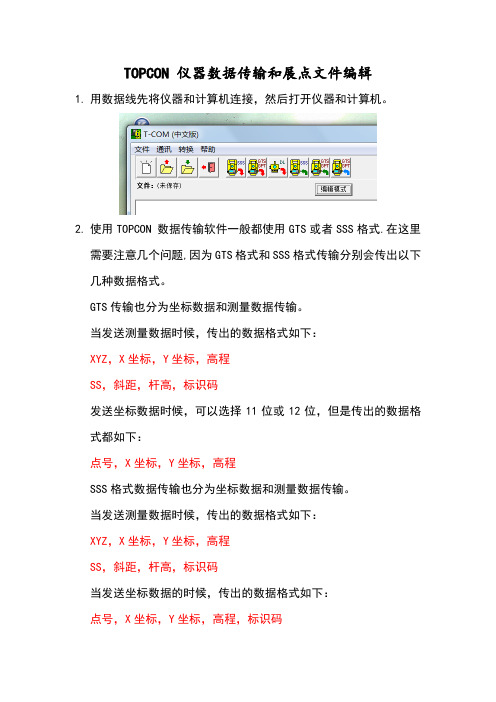
TOPCON 仪器数据传输和展点文件编辑1.用数据线先将仪器和计算机连接,然后打开仪器和计算机。
2.使用TOPCON 数据传输软件一般都使用GTS或者SSS格式.在这里需要注意几个问题,因为GTS格式和SSS格式传输分别会传出以下几种数据格式。
GTS传输也分为坐标数据和测量数据传输。
当发送测量数据时候,传出的数据格式如下:XYZ,X坐标,Y坐标,高程SS,斜距,杆高,标识码发送坐标数据时候,可以选择11位或12位,但是传出的数据格式都如下:点号,X坐标,Y坐标,高程SSS格式数据传输也分为坐标数据和测量数据传输。
当发送测量数据时候,传出的数据格式如下:XYZ,X坐标,Y坐标,高程SS,斜距,杆高,标识码当发送坐标数据的时候,传出的数据格式如下:点号,X坐标,Y坐标,高程,标识码即通过以上数据格式介绍,传出的数据有3种格式,我们可以选择不同格式,通常都用以下两种格式:①点号,X坐标,Y坐标,高程,标识码②点号,X坐标,Y坐标,高程3.接下来我主要介绍以下SSS格式的数据传输。
(但是要注意传输GTS格式时候一定要在“写入文本文件”这里打钩。
然后点击开始) 4.)在仪器上一般有以下几个选项设置,一般在COM口设置,波特率,数据位(一般奇数对仪器里面的奇数,偶数对仪器里的偶数)参数设置里面要和仪器上设置一样后就点击“开始”4.然后就开始数据传输,一般传输数据时候软件界面显示如下5.仪器数据传输完成后。
然后点击“文件”里面的“另存为”,将数据保存在一个文件夹下,一般要加后缀名为“.TXT”。
6.保存完的数据应该是如下图所示格式。
第一个逗号前是点名,第二个逗号前是X坐标,第三个逗号前是Y坐标,第四个逗号前是H,最后一个是标识码。
而要在南方CASS软件上展点绘图,其格式应该是:点名,标识码,X坐标,Y坐标,H。
由于以上数据格式不能在南方CASS软件上展绘,所以需要改变格式。
7.改变上图所示格式步骤如下:●先用EXCEL 打开TXT格式的数据,在EXCEL打开文件界面要选择“文件类型”为“所有文件”。
TOPCON通讯软件T-COM使用说明

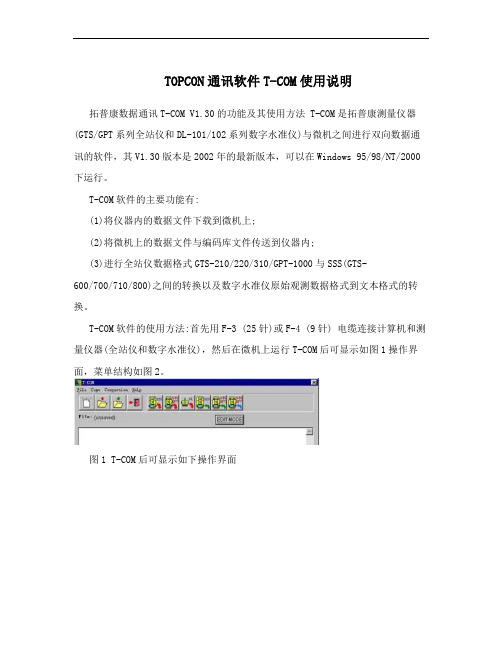
拓普康数据通讯T-COM V1.30的功能及其使用方法T-COM是拓普康测量仪器(GTS/GPT系列全站仪和DL-101/102系列数字水准仪)与微机之间进行双向数据通讯的软件,其V1.30版本是2002年的最新版本,可以在Windows 95/98/NT/2000下运行。
T-COM软件的主要功能有:(1)将仪器内的数据文件下载到微机上;(2)将微机上的数据文件与编码库文件传送到仪器内;(3)进行全站仪数据格式GTS-210/220/310/GPT-1000与SSS(GTS-600/700/710/800)之间的转换以及数字水准仪原始观测数据格式到文本格式的转换。
T-COM软件的使用方法:首先用F-3 (25针)或F-4 (9针) 电缆连接计算机和测量仪器(全站仪和数字水准仪),然后在微机上运行T-COM后可显示如图1操作界面,菜单结构如图2。
图1 T-COM后可显示如下操作界面图2 菜单结构一、T-COM数据通讯的主要步骤1、全站仪上设置通讯参数;2、计算机上设置相同的通讯参数;3、计算机进入接收状态,全站仪发送数据;或全站仪进入接收状态,计算机发送数据。
下面以全站仪为例介绍数据文件下载﹑上装的操作步骤。
二、数据文件下载以全站仪GTS-600/700/800系列为例(仪器内数据格式应设置为GTS-7,本例为下载观测数据文件):(1)在全站仪上选择程序/标准测量/SET UP/JOB/OPEN,选定需要下载的作业文件名;(2)在全站仪上选择程序/标准测量/XFER/PORT,设置通讯参数:9600(波特率)、NONE(奇偶位)、8(数据位)、1(停止位);(3)在全站仪上进入发送文件状态,选择标准测量/XFER/SEND/RAW (对于GTS-700/710/800,还需要选择COM);(4) 在计算机上运行T-COM软件,按快捷键将显示通讯参数设置,设为与全站仪相同的通讯参数及正确的串口后,按[GO]键,进入接收等待状态;(5)在全站仪上按[OK],计算机开始自动接收全站仪发送过来的数据。
TOPCON通讯软件T-COM使用说明
TOPCON通讯软件T-COM使用说明拓普康数据通讯T-COM V1.30的功能及其使用方法 T-COM是拓普康测量仪器(GTS/GPT系列全站仪和DL-101/102系列数字水准仪)与微机之间进行双向数据通讯的软件,其V1.30版本是2002年的最新版本,可以在Windows 95/98/NT/2000下运行。
T-COM软件的主要功能有:(1)将仪器内的数据文件下载到微机上;(2)将微机上的数据文件与编码库文件传送到仪器内;(3)进行全站仪数据格式GTS-210/220/310/GPT-1000与SSS(GTS-600/700/710/800)之间的转换以及数字水准仪原始观测数据格式到文本格式的转换。
T-COM软件的使用方法:首先用F-3 (25针)或F-4 (9针) 电缆连接计算机和测量仪器(全站仪和数字水准仪),然后在微机上运行T-COM后可显示如图1操作界面,菜单结构如图2。
图1 T-COM后可显示如下操作界面图2 菜单结构一、T-COM数据通讯的主要步骤1、全站仪上设置通讯参数;2、计算机上设置相同的通讯参数;3、计算机进入接收状态,全站仪发送数据;或全站仪进入接收状态,计算机发送数据。
下面以全站仪为例介绍数据文件下载)上装的操作步骤。
二、数据文件下载以全站仪GTS-600/700/800系列为例(仪器内数据格式应设置为GTS-7,本例为下载观测数据文件):(1)在全站仪上选择程序/标准测量/SET UP/JOB/OPEN,选定需要下载的作业文件名;(2)在全站仪上选择程序/标准测量/XFER/PORT,设置通讯参数:9600(波特率)、NONE(奇偶位)、8(数据位)、1(停止位);(3)在全站仪上进入发送文件状态,选择标准测量/XFER/SEND/RAW (对于GTS-700/710/800,还需要选择COM);(4) 在计算机上运行T-COM软件,按快捷键将显示通讯参数设置,设为与全站仪相同的通讯参数及正确的串口后,按[GO]键,进入接收等待状态;(5)在全站仪上按[OK],计算机开始自动接收全站仪发送过来的数据。
South和Topcon全站仪使用说明

第一章 全站仪简介第一节 全站仪概述全站仪是由电子测角、光电测距、微机与机载程序组合而成的智能型光电测量仪器。
一、全站仪的发展测角:光学经纬仪电子经纬仪 半站仪测距: 钢尺 电磁波测距仪 全站仪 数据处理系统光学经纬仪(optical theodolite),电子经纬仪(electronic theodolite)。
1 2图1-2 主流全站仪外观三、全站仪的功能介绍1.角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:(往往半个测回)瞄准A点——置零(0 SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(method of observation set)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET)。
2.距离测量(distance measurement)PSM、PPM的设置——测距、坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3.坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理图1-3 全站仪坐标测量原理图 图1-4 全站仪高程测量原理图平面坐标:若输入方位角SB α,测站坐标(S X ,s Y );测得:水平角β和平距st D 。
则有:方位角:βαα+=sb st 坐标:st st s t D X X αcos ⋅+= st st s t D Y Y αsin ⋅+= 高程:若输入测站S 高程S H ,测得仪器高i ,棱镜高v ,平距st D ,竖直角st θ,则有: 高程:v D i H H st st s t -⋅++=θtan(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为sb α——瞄准目标棱镜点T ,或输入后视点坐标来定向,按“测量”,即可显示点T 的三维坐标。
拓普康操作
使用手册T OPCON GPS 配套软件目录第一章前言 (3)1.1 系统要求 (3)1.2 安装和卸载 (3)第二章准备工作 (3)2.1 GPS 系统(GPS+) (3)第三章新建一个作业 (4)3.1 新建一个GPS+的设置 (6)第四章存储数据 (13)4.1 增加和编辑点 (13)4.2 增加和编辑编码 (15)第五章导入和导出 (18)5.1 导入 (18)5.1.1 由作业导入 (18)5.1.2 由文件导入 (19)5.1.3 由手簿导入 (21)5.2 导出 (21)5.2.1 由作业导出 (21)5.2.2 由文件导出 (23)5.2.3 由手簿导出 (24)第六章测量 (26)6.1 坐标转换 (26)6.2 设置基准站 (27)6.3 点测量 (27)6.4 线测量 (28)第七章放样 (30)7.1 点放样 (30)7.2 线放样 (31)TopSURV 操作手册.doc 1第八章CoGo (32)8.1 坐标反算 (32)8.2 交点 (32)8.3 尺度比 (33)8.4 平移 (33)8.5 旋转 (34)附:注意事项35TopSURV 2 操作手册.doc第一章前言本手册简要说明了TopSURV(GPS)软件的操作,以便于用户尽快入门。
有关TopSURV(GPS)软件的详细说明,请参阅《拓普康TopSURV (GPS) 软件参考手册》。
有关TopSURV 软件在全站仪方面的使用,本手册未做任何的说明,请参阅相关的其他资料。
1.1 系统要求显示器分辨率为240x320 或320x240、RAM 32MB、Windows CE 3.0 版或更高版的手簿(控制器)。
1.2 安装和卸载安装TopSURV,PC机上需要有Windows操作系统、Microsoft Active Sync 软件,并将PC机和手簿相连。
根据安装程序的提示即可自动完成TopSURV的安装。
卸载TopSURV,需要利用手簿上Windows CE控制面板的“卸载程序”功能。
TOPCON GNSS产品操作说明

基准站电台
基准站接收机 RTK流动站 流动站
特点: 特点: *需要数据链进行实时传送载波 需要数据链进行实时传送载波 相位观测量 *实时定位数据可达厘米级精度 实时定位数据可达厘米级精度
RTK动态初始(OTF) RTK动态初始( 动态初始
双频 OTF 初始化一般几秒钟--1分钟
已知点
测点
RTK测量特点 RTK测量特点
北京拓普康商贸有限公司市场部
你了解全球卫星导航系统吗? 你了解全球卫星导航系统吗?
你知道什么是GNSS,它由哪些部分组成的吗? 你知道什么是GNSS,它由哪些部分组成的吗? GNSS 你知道如何利用GPS进行定位吗? 你知道如何利用GPS进行定位吗? GPS进行定位吗 你知道GPS有几种工作方式吗? 你知道GPS有几种工作方式吗? GPS有几种工作方式吗 你知道单点定位,RTK是怎么回事吗? 你知道单点定位,RTK是怎么回事吗? 是怎么回事吗 你知道接收机起什么作用,它的工作原理是怎样的? 你知道接收机起什么作用,它的工作原理是怎样的?
伪距测量定位方式
单点定位 单点定位 RTD – 主要应用于各种载体的米级导航。 主要应用于各种载体的米级导航。 应用于各种载体的米级导航
载波相位定位方式
单点定位:目前主要用于研究,应用面受到限制。 单点定位:目前主要用于研究,应用面受到限制。 定位 相对定位(差分定位技术):利用两台以上的多台GPS接收机的同 相对定位(差分定位技术):利用两台以上的多台GPS接收机的同 定位 ):利用两台以上的多台GPS 时观测量之间参数和误差的相关性,将载波相位观测值差分处理, 时观测量之间参数和误差的相关性,将载波相位观测值差分处理, 进行测站之间相对精密定位。
目前可供利用的系统主要有美国的GPS 美国的GPS 和俄罗斯的GLONASSS 俄罗斯的GLONASSS
TOPCON静态处理软件Pinnacle使用指南

输入 中央子午线的经度(111), 中央子午线投影变形的尺度比(高斯投影为1), Y轴的纬度(我国为赤道,即0), Y坐标的平移值(500Km=500000m), X坐标的平移值(0)。
2.输入控制点的坐标
输入控制点名、X、Y、H,选择 海拔高和基准Sample
3. 控制点匹配
为方便以后WGS84报表,可再拖拽一个控制网,作一遍 自由网平差,将其名字改为控制网的名字如SampleNET
可点击+号展开来查看基线解算的结果及解算信息
三. 自由网平差
1. 组网,按《规范》要求挑选独立基线构成GPS 控制网,有两种方法 A. 将所有独立基线打勾 B. 将冗余基线打勾,然后选禁 用,再将整体打勾
将选好的基线整体“托拽”到“网 平差栏”即可自动完成组网工作, 网平差栏将出现一个“新任务”, 按F2键可改名
点击从本地计算机导入数据按 钮,即弹出选择原始数据文件 的对话框,找到需要导入的原 始数据文件
点击开始按钮, 即可完成数据的 导入工作。
导入完成后,主工作区的“原始 数据栏”会出现一个“新任务” ,按F2键可将其改名,比如每个 原始观测时段可起一个名字 依次将其他时段数据导入
输入点名、观测时段名、仪器高、斜高、天线型号 。 数据导入工作已经全部结束。
2. 求平差的先验单位权中误差
在自由网上单击鼠标右键 选属性,将出现网属性界 面,按以下进行设置
在自由网上单击鼠标右键 选平差计算,将出现粗差 检测,选“全部采用”
在网属性界面,高级页面,将基线的先验 单位权中误差设置为2.67
3. 重新进行平差计算, 即完成了自由网平差
四. 固定控制点平差
1.定义所用的坐标系统
ห้องสมุดไป่ตู้
topcon-opusa6standardfull-technicaldatasheet说明书
Industriestrasse 7 ▪ 65366 Geisenheim ▪ Germanywww.topcon-electronics.de ▪ dl*********************Technical Data SheetOPUS A6 Standard Full07.02.2023Errors and technical changes excepted1 Notes and WarningsAttention!This description is not a substitution for the concerned product’s documentation. Please do read the documentation including the manuals carefully before dealing with this product. If the safety instructions in the documentation are not followed dangerous situation can occur that can result in damages, injuries and/or death by high voltage or wrong handling. In case you do not have the correct documentation, you can order it by contacting***********************. Only properly trained personnel with the correct qualification is allowed to handle the device.Attention!Do not open the housing to avoid danger to high voltage. Before touching the electric assemblies make sure that the electricity is switched off completely. If the front pane is broken the device needs to be taken out of service due to risk of injury. If perceivable damages on the device exist that can compromise the functionality, it must be taken out of service due to the danger of malfunctions. These particularly include damages to t he LCD display, damages to the keyboard, damages that compromise the protection level and damages to the encoder knobs.Please note:All content is subject to change without notice. Errors and omissions excepted.Mounting and Handling1. Do not use the cable as a handle to carrythe device.2. Mounting in clean working environmentonly.3. Do not mount the device under the use ofviolence because it can cause damage. 4. The device must be mounted by trainedpersonnel only into especially designed and tested system.5. The device may not be opened ordisassembled.6. The device is to be cleaned with a moistfuzz free cotton cloth. If necessary, a mild cleaning agent may be used. Do nit use acid or abrasive cleaning agents.7. The device is to be stored in a cool and dryenvironment and to be protected against sunshine.8. If the environmental temperature isbeneath 10°C the reaction time of the display increases.2 General InformationOrder numbersThis documentation is valid for OPUS A6 Generation 2 order numbers as follows:DimensionsHousingFront cover: PC/ABS, colored light grey (RAL 7035) with black rubber frame.Back cover: aluminum die cast, colored light Mounting● Landscape or portrait ● Standalone● In-dash3 Display4 Input DevicesTouchPCTLeft Keypad6 keys with tactile feedback Multicolour LED backlight Lifetime 1.000.000 actuationsRight Keypad6 + 4 keys with tactile feedback Multicolour LED backlight Lifetime 1.000.000 actuations Indicators and SensorsLight sensor1 Multicolor LED3 Status LEDsEncoderOptical encoder with 16 mechanical detents and push functionLifetime: 1 milion cyclesMulticolour LED backlight5 ElectronicsProcessor platformCPU:Freescale I.MX6®solo, 800 MHz Mass storage: 4 GByte (minus space for OS &application)RAM: 512 MByteRTC: Buffered by gold capBuzzer80 dB @ 1kHz in 1 m distancePower supplySystem supplied through terminal 30 (battery +, see pinout) and 31 (battery -, see pinout). Terminal 15 (ignition) to be used to switch on/off. Operating voltage range: 9 … 36 V DC.Short circuit protection.Over-voltage protection up to 48 V for max. 2 min. Inverse polarity protection up to -48 V DC for max. Current consumption (without external load), max6 InterfacesCAN Bus2 x CAN-Interface according to ISO 11898, CAN-specification 2.0 B active, up to 1 Mbit/s (default 250 Kbit/s, 500 Kbit/s, 750 Kbit/s, 1 Mbit/s)RS2321 x RS232-InterfaceType: EIA232 (only RXD, TXD, GND) Speed: max. 115 KbpsUSBHost 2.0Main connector: 1 x High speedInputs4 configurable analog/digital inputsInput impedance > 3k Ohm Resolution: 10 bit (1028 digits,1 digit = 11,7 mV) Voltage range: 0 … 12 VOver-voltage protection: Up to 36 VDC Short circuit protection: Up to 36 VDC Frequency: Max. signalfrequency 50 HzInput 1 max. signalfrequency 10 kHz Outputs3 digital outputsShort circuit protection: up to 36 VI max300 mA open drain R DS,on < 1 OhmR DS,off> 100 kOhm Video InterfaceInputs: 3 x analogV ss 1 VCamera supply: 12 VDCMax. current: 500 mAEthernet Interface1 x 10/100 Mbit/s Base TAudio1 Audio output (left, right, GND)AC97 compatibleOutput power approx.65 mW @ 32 Ohm7 Connectors ConnectorsMain Typo-AMP 1437288-6Mating connector (customer)Typo-AMP 3-1437290-7Mating crimp contact (customer)Typo-AMP 3-1447221-4Dummy Plug (customer)Typo-AMP 4-1437284-3Video M12 round connector, female,5-pole, B-coded, acc. To EN61076-2-101Recommended mating connector type according to IEC 61076-2-10: MM 005-G x1-B x) A, C, I, P, R or S-type Ethernet M12 round connector,female, 4-pole, D-coded,acc. To EN 61076-2-101 Recommended mating connector type according to IEC 61076-2-10: MM 004-G x1-Dx) A, C, I, P, R or S-type8 SoftwareOperating System Linux Kernel 3.0.0 or higher Application Programming•OPUS Projektor•CODESYS 3.x•C/C++9 Testing and VerificationCE-ComplianceEU Directive 2014/30/EU (EMC) according to ● EN 12895: Industrial Trucks –Electromagnetic compatibility● EN 13309: Construction machinery –Electromagnetic compatibility of machines with internal electrical power supply● EN ISO 14982: Agricultural and forestry machinery – Electromagnetic compatibility –Test methods and acceptance criteriaE1 – Type approvalEU Directive ECE R 10.4Protection Level (IP Code)IP 65 and IP 66 according to ISO 20653: Road Vehicles – Degrees of protection (IP-Code) –Protection of electrical equipment against foreign objects, water and accessElectrical12 and 24V-Systems according to ISO 16750-2: Road Vehicles – Environmental conditions and testing for electrical and electronic equipment – Electrical Loads● ISO 15003: Agricultural Engineering –Electrical and electronic equipment – Testing resistance to environmental conditions Mechanical● ISO 16750-3: Road Vehicles – Environmental condition and testing for electrical and electronic equipment – Mechanical loads., Code L● ISO 15003: Agricultural Engineering – Electrical and electronic equipment – Testing resistance to environmental conditions● Mechanical Shock: Level 2● Random Vibration: Level 2● Sinusoidal Vibration: Level 2Climate● ISO 16750-4: Road Vehicles –Environmental conditions and testing for electrical and electronic equipment – Climatic Loads● Operating Temperature Range: -30 … + 65°C ● Storage Temperature Range: -40 … +85°C ● ISO 15003: Agricultural Engineering – Electrical and electronic equipment –Testing resistance to environmental conditions10 PinoutMain connector pinout1 VCCsupply voltage +; terminal 30 2 Ignition Input ignition input; terminal 15 3 GND supply voltage -; terminal 31 4 CarGND Car GND5 n.c. not connected6 n.c. not connected7 n.c. not connected8 CAN1H CAN 1 high9 CAN1L CAN 1 low 10 CAN2H CAN 2 high 11 CAN2L CAN 2 low12 USB_VCC USB +5V supply 13 USB_GND USB supply GND 14 USB_D- USB data - 15 USB_D+ USB data +16 RS232 RxD RS232 receive data 17 RS232 TxD RS232 transmit data 18 RS232 GND RS232 GND19 A/DI3 analog/digital input 3 20 A/DI1 analog/digital input 1 21 A/DI2 analog/digital input 2 22 A/DI4analog/digital input 4 23 SERV_EN service enable 24 DO3 digital output 3 25 DO1 digital output 1 26DO2digital output 2View on rear side of the OPUS A6OPUS displays in the industrial sector are only intendedto be used with cablelength less than 30 Pin No. Assignment DescriptionVideo connector pinout Ethernet connector pinoutVideo connector, M12, female, 5 pins, b-coded,View on rear side of the OPUS A3Ethernet connector, M12, female, 4 pins, d-coded,view on rear side of the OPUs A3Recommended mating connector type accordingto IEC 61076-2-10:MM 005-G x1-Bx) A, C, I, P, R or S-typeRecommended mating connector type accordingto IEC 61076-2-10:MM 004-G x1-Bx) A, C, I, P, R or S-type11 Accessories (not included)Standalone mounting adaptor for RAM® mountingsystem (OPUSA6ZBAH001)Material PC+ABSDimensions 74x84x42xmm (WxHxD) Operating temperature -30 … + 75 °CStorage temperature -40 … + 85 °CMax mounting torque 2.5 ± 0.2 NmMounting kit (RAM®Mount 1,5’’, adapter cover)(OPUSBERM006)1 x RAM®– 101 U1 x Adapter for RAM® mounting system7 x cylinder head bolt M5x12 DIN 912In-Dash mounting frame (OPUSA6ZBEB002)Material PC+ABSDimensions144x101x35 (WxHxD) Operating temperature -30 … + 75 °C Storage temperature -40 … + 85 °C Max mounting torque 2.5 ± 0.2 NmDelivery includes highlighted parts only.Please follow the instruction for in-dash mounting.26 pin connector, contact pins, dummy plugs (OPSVF26001)。
TOPCON全站仪的使用说明

第一章 TOPCON GTS-312 全站仪的使用一、仪器外观和功能说明1、仪器外观图 1 : GTS-312 全站仪外观及各部件名称2、面板上按键功能——进入坐标测量模式键。
◢ ——进入距离测量模式键。
ANG ——进入角度测量模式键。
MENU ——进入主菜单测量模式键。
ESC ——用于中断正在进行的操作,退回到上一级菜单。
POWER ——电源开关键◢ ◣ ——光标左右移动键▲ ▼ ——光标上下移动、翻屏键F1 、 F2 、 F3 、 F4 ——软功能键,分别对应显示屏上相应位置显示的命令。
3、显示屏上显示符号的含义V ——竖盘读数; HR ——水平读盘读数(右向计数); HL ——水平读盘读数(左向计数);HD ——水平距离; VD ——仪器望远镜至棱镜间高差; SD ——斜距; * ——正在测距;N ——北坐标,相当于x ; E ——东坐标,相当于y ; Z ——天顶方向坐标,相当于高程H 。
二、角度测量模式功能:按 ANG 键进入,可进行水平角、竖直角测量,倾斜改正开关设置。
第 1 页F1 OSET :设置水平读数为0°。
F2 HOLD :锁定水平读数。
F3 HSET :设置任意大小的水平读数。
F4 P1 ↓:进入第 2 页。
第 2 页F1 TILT :设置倾斜改正开关。
F2 REP :复测法。
F3 V% :竖直角用百分数显示。
F4 P2 ↓:进入第 3 页。
第 3 页F1 H-BZ :仪器每转动水平角90° 时,是否要蜂鸣声。
F2 R/L :右向水平读数 HR/ 左向水平读数 HL 切换,一般用 HR 。
F3 CMPS :天顶距 V/ 竖直角 CMPS 的切换,一般取 V 。
F4 P3 ↓:进入第 1 页。
三、距离测量模式功能:先按◢ 键进入,可进行水平角、竖直角、斜距、平距、高差测量及 PSM 、 PPM 、距离单位等设置第 1 页F1 MEAS :进行测量。
F2 MODE :设置测量模式, Fine/coarse/tragcking(精测/ 粗测/ 跟踪)。
拓普康GPS数据处理教程

拓普康GPS静态测量Pinnacle 软件培训教程目录第一章Pinnacle中文软件的安装 (3)第二章Pinnacle软件的操作流程 (3)1.1运行Pinnacle软件 (3)1.2 Pinnacle内业处理 (3)1.2.1工程项目管理 (3)1.2.2原始数据的输入 (5)1.2.3原始数据属性修改 (8)1.2.4基线处理 (13)1.2.5WGS84无约束平差 (22)1.2.6建立大地坐标系统(此过程仅需做一次) (25)1.2.7大地控制点的输入与匹配 (28)1.2.8大地坐标系统下的约束平差 (32)1.2.9定义地方坐标系统(此过程仅需做一次) (36)1.2.10地方控制点的输入与匹配 (37)1.2.11地方坐标系下的约束平差 (42)第一章Pinnacle中文软件的安装建议Pinnacle软件的安装步骤如下:1、安装Pinnacle软件的英文版2、调入大地水准模型文件(注:当地坐标系统可以不需要安装)3、安装Pinnacle软件中文版(注:安装的路径一定与英文版相同)4、安装软件的帮助文件(注:帮助软件仍是英文版,可以根据自己的情况选择是否安装,建议安装目录与英文版相同)第二章Pinnacle软件的简易流程1.1运行Pinnacle软件Pinnacle 软件安装完后,点击开始\程序\Topcon Positioning System\Pinnacle汉化版,运行Pinnacle 程序,也可双击桌面上的Pinnacle图标。
1.2Pinnacle内业处理1.2.1工程项目管理1)运行Pinnacle2345)点击工具条上的1.2.2原始数据的输入12)在出现的界面中,选择工具条上的3)在出现的界面中,选择数据下载的路径,如:示例\NO1,按ctrl+A可以全部选择。
点4)在出现的界面中,选择工具条上的5该对话框。
同样的方法将其他时段数据导入进来,本次将示例中的NO2的数据导入导数据库中。
TOPCON全站仪操作
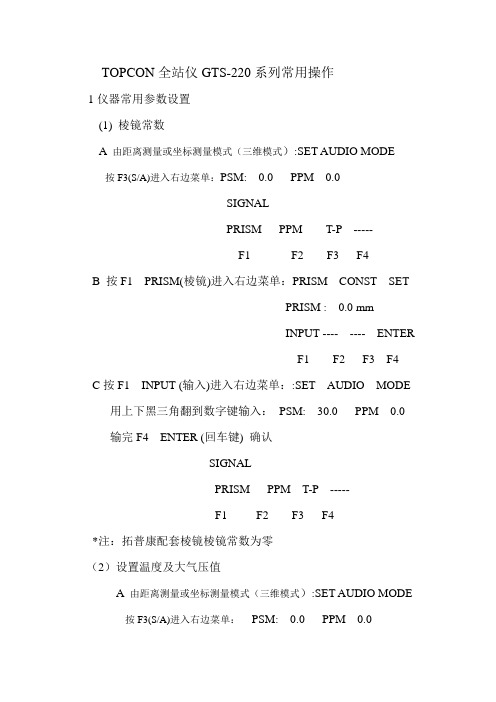
TOPCON全站仪GTS-220系列常用操作1仪器常用参数设置(1)棱镜常数A 由距离测量或坐标测量模式(三维模式):SET AUDIO MODE按F3(S/A)进入右边菜单:PSM: 0.0 PPM 0.0SIGNALPRISM PPM T-P -----F1 F2 F3 F4B 按F1 PRISM(棱镜)进入右边菜单:PRISM CONST SETPRISM : 0.0 mmINPUT ---- ---- ENTERF1 F2 F3 F4C按F1 INPUT (输入)进入右边菜单::SET AUDIO MODE 用上下黑三角翻到数字键输入:PSM: 30.0 PPM 0.0 输完F4 ENTER (回车键) 确认SIGNALPRISM PPM T-P -----F1 F2 F3 F4*注:拓普康配套棱镜棱镜常数为零(2)设置温度及大气压值A 由距离测量或坐标测量模式(三维模式):SET AUDIO MODE按F3(S/A)进入右边菜单:PSM: 0.0 PPM 0.0SIGNALPRISM PPM T-P -----F1 F2 F3 F4B 按F3 T -P (温度及大气压)进入右边菜单:TEMP PRES SET用上下黑三角翻到数字键输入TEMP(温度)输完F4 ENTER(回车键)确认. PRES(大气压): hpaINPUT ---- ---- ENTERF1 F2 F3 F42 数据采集(1)角度距离测量A 按MEMU(主菜单)进入右边菜单:MEMUF1:DATA COLLECT(数据采集)F2:LAYOUTF3:MEMORY MGR (内存)B 按F1 进入右边菜单SELECT A FILE (选择文件)FN:(文件名)INPUT LIST ----- ENTERF1 F2 F3 F4C按F1输入文件名或按F2 LIST(列表)列出所要选择的文件,按F4 ENTER(确认)进入数据采集菜单如右图:DATA COLLECT(数据采集)F1:OCC.PT# INPUT (输入测站点)F2:BACKSIGHT (后视)F3:FS/SS (测点)D 按F1输入测站点,用上下黑三角翻到数字键或字母输入,输完按F3 REC(记录),自动返回数据采集菜单PT# PT—01(测站点名)ID :INS.HT : 0.000m (仪器高)INPUT SRCH REC OCNEZF1 F2 F3 F4* 测站点设置完毕E 由数据采集菜单按F2 BACKSIGHT 后视),菜单如下:BS# (后视点名)PCODE :R .HT : 0.000m (镜高)INPUT 0SET MEAS BSF1 F2 F3 F4按F1输入后视点名,用上下黑三角翻到数字键或字母输入,输完按F4 ENT(确认),再用上下黑三角翻到R .HT : 输入0.000m (镜高),照准后视按F2 0SET(置零),按F3 MEAS(测距)以便确认后视点是否正确。
拓普康数据通讯软件使用 (1)
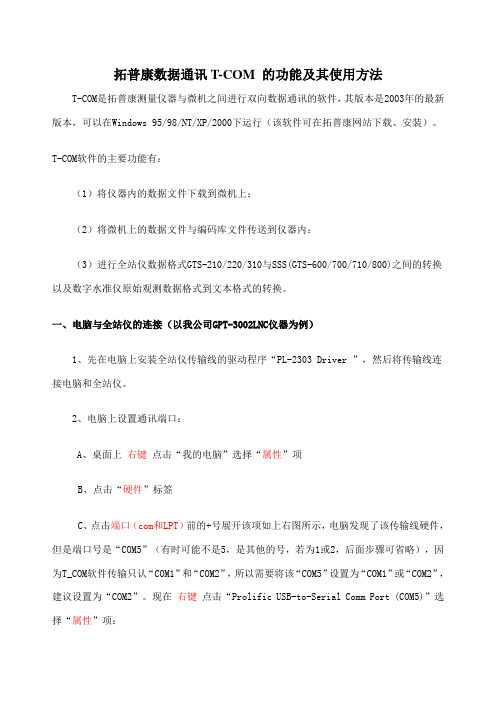
拓普康数据通讯T-COM 的功能及其使用方法T-COM是拓普康测量仪器与微机之间进行双向数据通讯的软件,其版本是2003年的最新版本,可以在Windows 95/98/NT/XP/2000下运行(该软件可在拓普康网站下载、安装)。
T-COM软件的主要功能有:(1)将仪器内的数据文件下载到微机上;(2)将微机上的数据文件与编码库文件传送到仪器内;(3)进行全站仪数据格式GTS-210/220/310与SSS(GTS-600/700/710/800)之间的转换以及数字水准仪原始观测数据格式到文本格式的转换。
一、电脑与全站仪的连接(以我公司GPT-3002LNC仪器为例)1、先在电脑上安装全站仪传输线的驱动程序“PL-2303 Driver ”,然后将传输线连接电脑和全站仪。
2、电脑上设置通讯端口:A、桌面上右键点击“我的电脑”选择“属性”项B、点击“硬件”标签C、点击端口(com和LPT)前的+号展开该项如上右图所示,电脑发现了该传输线硬件,但是端口号是“COM5”(有时可能不是5,是其他的号,若为1或2,后面步骤可省略),因为T_COM软件传输只认“COM1”和“COM2”,所以需要将该“COM5”设置为“COM1”或“COM2”,建议设置为“COM2”。
现在右键点击“Prolific USB-to-Serial Comm Port (COM5)”选择“属性”项:点击端口设置标签点击高级(A)按钮点击COM端口号(P)后的箭头,选择COM2后确定这样就将端口号由“COM5”设置成了“COM2”了。
二、从全站仪上下载数据至电脑的操作1、全站仪上设置通讯参数;在测角模式下,按 MENU 键显示主菜单按F3 [存储管理],进入存储管理1/3菜单按F4 [翻页] 两次,进入存储管理3/3菜单按F1 [数据通讯],进入数据传输菜单按F1 [GTS 格式],进入数据传输菜单按F3 [通讯参数],进入通讯参数设置按F1,进入通讯协议设置界面按F2,将通讯协议设置为“无”,即方括号 [ ] 位于[F2:无]上按F4 [回车],保存设置,页面返回参数设置页面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pinnacle 操作手册第 1 章 Pinnacle中文软件的安装 (4)第 2 章 Pinnacle软件的简易流程 (5)2.1运行Pinnacle软件 (5)2.2 Pinnacle内业处理 (5)2.2.1工程项目管理 (5)2.2.2原始数据的输入 (7)2.2.3原始数据属性修改 (10)2.2.4 基线处理 (13)2.2.5 WGS84无约束平差 (15)2.2.6定义国家坐标系统(此为第一种方式) (18)2.2.7在国家坐标系统下做约束平差 (21)2.2.8约束平差 (26)2.2.9定义地方坐标系统(此为第二种方式) (31)2.2.10在地方坐标系统下做约束平差 (32)2.2.11约束平差 (37)附录一基线处理和优化 (42)(一) 基线质量的判别 (42)(二) 基线处理方法 (44)附录二:关于GPS控制网的平差计算 (50)(一) 概述50(二) 平差预处理 (51)2.1数据的有效性确认、检查 (51)2.2制网网形测试 (53)2.3环闭合差和重复基线测试 (55)2.4主要基线集构造器 (57)2.5控制点兼容性测试 (58)(三) WGS84下的自由网平差 (59)(四) 控制网约束平差 (65)(五) 控制网图中的误差椭球 (70)附录三随机软件工具的应用 (72)(一) 计算单点转换 (72)(二) 星历预报 (73)(三) 添加天线类型 (81)(四) 转换Renix格式 (84)(五) 七参数计算 (87)(六) 自定义大地水准模型 (90)第 1 章Pinnacle中文软件的安装建议Pinnacle软件的安装步骤如下:1.装Pinnacle软件的英文版2.调入大地水准模型文件(注:当地坐标系统可以不需要安装)3.安装Pinnacle软件中文版(注:安装的路径一定与英文版相同)4.安装软件的帮助文件(注:帮助软件仍是英文版,可以根据自己的情况选择是否安装,建议安装目录与英文版相同)第 2 章Pinnacle软件的简易流程2.1运行Pinnacle软件Pinnacle 软件安装完后,点击开始\程序\Topcon Positioning System\Pinnacle汉化版,运行Pinnacle 程序,也可双击桌面上的Pinnacle图标。
2.2 Pinnacle内业处理2.2.1工程项目管理1)运行Pinnacle软件后,在出现的对话框,点击新建2)在出现的对话框中,选择存储的路径,如要建立新建文件夹,再点击新建,在出现的对话框中输入新建文件夹名称,点击确定,返回到上个界面,点击确定。
3)输入项目名称,如:示例,建议使用项目名称进行管理,点击确定4)取消复选框前面的对勾,点击结束,关闭向导点击工具新建控制网按键,输入控制网名,如5)条上的0515。
2.2.2原始数据的输入1)在新建控制网上右键选择导入数据命令2)在出现的界面中,选择工具条上的本地计算机按键3)在出现的界面中,选择数据下载的路径,如:示例\NO1,按ctrl+A可以全部选择。
点击打开。
4)在出现的界面中,选择工具条上的开始按键,将数据导入数据库中。
5)导入数据后,将提示观测时段成功过滤、导入完成。
点击右上角关闭命令快捷键,关闭该对话框。
同样的方法将其他时段数据导入进来,本次将示例中的NO2的数据导入导数据库中。
2.2.3原始数据属性修改1)在原始数据栏中点击每个新任务前的“+”号,可以看到输入的原始数据,该原始数据是按照时间的顺序进行排列的,右击第一个点名,选属性。
2)在出现的界面中,参考外业手簿上的记录,进行观测数据属性设置,在名称一栏中:输入与真实点名相同的文件名称,如G4,点击新建命令。
3)在出现的界面中,名称栏输入实际点名如:G4,点击确定命令,返回上个界面。
4)在返回的界面中,点击天线面板,在观测高栏前的方框中打上对钩,并根据外业测量的情况选择斜高或垂高,在空白处输入外业量测的仪器高,如:1.532,在类型栏选择外业使用的GPS天线类型JPSLEGANT_E,Hiper接收机选择Top_Hiper_GD,点击确定命令返回。
同样的方法对其他点进行点的属性更改,此过程一定要细心、避免出错。
全部的数据属性更改后,建议使用观测时段列表命令进行复查。
注意:对于在同一个点上观测多次的数据,其点必须从下来列表中进行选择,如图:此时点名列表中的确定命令将不可用。
2.2.4 基线处理1)点住原始数据栏中的新任务,将它拖到基线解算栏中释放,出现的界面中点中静态解算模型,点击确定。
2)在基线解算栏中,右击基线网名,如:新任务,选基线解算,进行基线处理。
3)在出现基线解算界面,软件自动进行基线处理,当基线处理完毕之后,会出现基线解算信息,点开各项前的+号可查看基线处理信息,这里我们关心的是基线的精度RMS及Ratio 值,一般要求Ratio在95以上。
对于快速静态测量可以适当放宽,可以根据实际的工程要求进行判别,点击关闭按钮关闭窗口。
如果对基线结果不是满意的话,可以参考手册附录一:中的方法进行处理(开窗、删星、高度角设置等),具体的步骤见附录一,最后保证基线精度满足要求。
同样的方法处理其他时段的数据。
2.2.5 WGS84无约束平差1)当基线全部处理完后,将所有的基线文件选中(即将每一个基线前的方框中打上对钩)一起拖到网平差栏中释放,右点击新任务,选平差计算。
2)平差后,屏幕显示控制网图界面,查看有关的平差信息,我们关心的是测量中的最小二乘的结果必须在限差范围内,对于不能够形成闭合的图形,此项检查可以忽略。
对于超限的结果,可以根据提示的权值,重新进行匹配,集体的步骤参考附录二,平差合格后关闭该界面,返回。
3)平差合格后,返回到主界面,在网平差栏中,右点击新任务,选报表命令。
4)在出现的对话框,点开控制网平差成果表,只选平差的坐标系统一项,点击缺省运行,程序会自动生成WGS84无约束平差的平差结果报表。
第一种方式:进行大范围、长距离、高精度的控制测量,采用的是国家坐标系统。
2.2.6定义国家坐标系统(此为第一种方式)1)在工具条上选(坐标系统编辑器)图标。
2)选择椭球面版,点击新建命令建立新的椭球参数,输入新建椭球名称:北京54,北京54椭球相关的参数,a=6378245 ,1/f=298.3,点击确定命令返回。
3)选择基准面版,点击新建命令,在出现的界面中输入基准名称:北京54,并选择椭球名称为北京54,点击确定命令返回。
4)选择平面坐标系统面版,点击新建命令,输入新建的平面坐标系统名称:示例,在点击新建命令,输入中央子午线的名称:111,基准名称选择建立好的北京54基准,点击界面中部的编辑投影命令,进入投影编辑界面,输入起始中央子午线:111,尺度比:1,E偏移值:500000。
点击确定命令返回主界面,点击关闭命令关闭该界面,具体步骤参考下列图。
2.2.7在国家坐标系统下做约束平差1)右点击网名选择控制点列表命令。
2)在出现的界面中选择退出命令。
3)在控制点列表界面中,右击左边的空白区,选择新建控制点列表。
4)输入已知控制点表的名称0515,注释栏为空,点击确定。
5)右击新建控制点表,选新建项目-平面坐标,6)在对话框的常规栏目下,输入已知点的点名及坐标:Northing,Easting,Height,高程类型:椭球高或者海拔高;一般选择海拔高,对系统/基准栏,选择新建立好的地方坐标系统的名称,如示例,其它参数均不改,点击确定,同理输入其它已知点的坐标。
输入完后关闭该界面。
7)在网平差栏中,进行国家坐标系统的已知点和WGS84点匹配,右击控制网名,如新任务,选择匹配控制点。
8)一般如果只有一个控制点列表,下面的界面不会出现,直接运行第九步,如果出现选择需要的列表名称,点击确定。
9)在出现的界面中,在左面要匹配的点栏内选择控制点的点名,在右面控制点同样选择控制点名称,点击匹配命令,则控制点被加入到下面的数据库中。
注意:软件自动计算已知点之间的距离误差,该距离不会大于100,如果超限,请检查坐标系统的建立或坐标的输入。
同样的方法加入其他控制点,全部加入后,点击关闭命令,返回。
注意:如果有两个控制点,最好只固定一个点的高程,两个点的平面。
三个以上的控制点,全部固定即可。
2.2.8约束平差1)在网平差栏中右击新任务,并选择属性命令。
2)在出现的界面中选择参数面板,进行如下的配置,该配置为固定模式,点击确定命令返回转换模型:选择地心模型,如果只有两个控制点,请将旋转中E、N前的复选框取消。
约束 :选择固定控制点平差系统/基准 :选择建立的基准,如:北京54大地水准面 :EGM963)在网平差栏中,右点击新任务,选平差计算。
程序自动进行约束平差。
4)在出现的控制网界面,同样要检查最小二乘的情况。
一般可以忽略,关闭返回。
5)右击新任务,选择报表。
6)在该界面,点开控制网平差成果表,选择所选的坐标系统,点击缺省运行。
7)出现的界面中选择平面坐标和系统/基准中的自己定义坐标系统:示例,点击确定命令。
程序自动生成约束平差的最终结果报表。
至此,用Pinnacle进行Topcon GPS数据处理的全部操作结束。
第二种方式:进行局部范围、短距离、高精度的施工控制测量,采用国家坐标系统或地方坐标系统均可。
2.2.9定义地方坐标系统(此为第二种方式)1) 在工具条上选(坐标系统编辑器)图标。
2) 在弹出的对话框中,选择地方坐标系统面板,点击新建命令,在出现的界面中输入名称:如:示例(地),点击确定命令后,返回上个界面,点击关闭命令,返回主菜单界面。
2.2.10在地方坐标系统下做约束平差1)右点击网名选择控制点列表命令。
2)在出现的界面中选择退出命令。
3)在控制点列表界面中,右击左边的空白区,选择新建控制点列表。
4)输入已知控制点表的名称0515,注释栏为空,点击确定。
5)右击新建控制点表,选新建项目-地方坐标,6)在对话框的常规栏目下,输入已知点的点名及坐标:Northing,Easting,Height,高程类型:椭球高或者海拔高;一般选择椭球高,对系统/基准栏,选择新建立好的地方坐标系统的名称,如示例(地),其它参数均不改,点击确定,同理输入其它已知点的坐标。
输入完后关闭该界面。
7) 在网平差栏中,进行地方坐标系统的已知点和WGS84点匹配,右击控制网名,如新任务,选择匹配控制点 。
8)一般如果只有一个控制点列表,下面的界面不会出现,直接运行第九步,如果出现选择需要的列表名称,点击确定。
9)在出现的界面中,在左面要匹配的点栏内选择控制点的点名,在右面控制点同样选择控制点名称。
点击匹配命令,则控制点被加入到下面的数据库中。
同样的方法加入其他控制点,全部加入后,点击关闭命令,返回。