几种基于测距的定位机制原理
距离测量与坐标采集的原理

距离测量与坐标采集的原理
距离测量和坐标采集是一种常见的测量方式,主要用于确定物体的位置和空间关系。
其原理可以通过以下几种方法实现:
1. 平面坐标法:通过测量物体在平面上的两个坐标点,可以确定物体在该平面上的位置。
根据勾股定理,可以计算出这两点之间的直线距离。
2. 三角测量法:利用三角形的几何关系来测量距离。
当我们知道一个角的大小和两边的长度时,可以通过正弦或余弦定理计算出第三边的长度。
通过设置参考点和测量角度,可以逐步测量出物体之间的距离。
3. 激光测距法:利用激光束的发射和接收来测量距离。
激光测量仪器会发射一束短脉冲激光并记录激光的反射时间。
根据光速的知识和反射时间,可以计算出物体与测量仪器之间的距离。
4. 雷达测距法:利用雷达信号的发射和接收来测量距离。
雷达发射一束电磁波并接收其反射信号,通过计算信号的传播时间和信号速度,可以得到物体与雷达之间的距离。
5. GPS定位法:利用全球定位系统(GPS)来测量物体的位置。
GPS通过接收来自卫星的信号,计算出物体与卫星之间的距离,并利用三角测量法来确定物体的坐标。
这些原理在不同的应用场景中具有各自的优劣,需要根据具体的测量需求和环境条件选择合适的方法。
测距的原理

测距的原理
测距的原理是基于声波、光波或电磁波的传播速度来计算距离的。
下面将分别介绍这三种测距原理。
声波测距利用声音在空气中传播的速度来计算距离。
测距设备发射一个声波信号,当声波遇到障碍物后会发生反射,并返回到测距设备。
设备接收到反射回来的声波信号后,会根据声音传播的速度和时间间隔来计算出距离。
光波测距利用光在空气或介质中传播的速度来计算距离。
常见的光波测距设备有激光测距仪和红外线测距仪。
激光测距仪发射一个激光束,当激光束遇到物体表面时,会发生反射并返回到设备。
设备通过测量激光束发射和接收的时间间隔来计算距离。
红外线测距仪则利用红外线的传播速度来计算距离,原理类似于激光测距仪。
电磁波测距利用电磁波在空气或介质中传播的速度来计算距离。
电磁波测距常用于雷达系统中。
雷达发射一个电磁波信号,当信号遇到目标物体后会发生反射,并返回到雷达系统。
雷达系统根据信号的传播速度和时间来计算距离。
总之,无论是声波、光波还是电磁波测距,其基本原理都是利用信号从发射源到目标物体的往返时间,再结合信号传播速度的知识来计算距离。
这些测距原理在实际应用中有着广泛的应用,如工程测量、导航、环境监测等。
卫星定位的原理

卫星定位的原理
卫星定位的原理主要基于三个基本原理:距离测量原理、时钟同步原理以及接收机定位原理。
距离测量原理是利用卫星和接收机之间的电磁波传播时间来计算距离的。
卫星向接收机发射出信号,接收机接收到这个信号并测量信号的传播时间,然后利用信号传播速度(即光速)乘以传播时间,就可以得到卫星和接收机之间的距离。
时钟同步原理是为了保证测量结果的准确性,因为准确的时间信息对于定位是非常重要的。
卫星和接收机之间需要保持精确的时钟同步,以确保测量出来的传播时间准确无误。
接收机定位原理是通过多个卫星的信号进行测量,利用三角定位的原理来确定接收机的位置。
通过同时接收多颗卫星的信号,可以得到多组距离数据,然后通过这些数据进行三角计算,就可以确定接收机的位置坐标。
综上所述,卫星定位的原理是通过测量卫星和接收机之间的距离,利用时钟同步和多个卫星信号的三角计算来确定接收机的位置。
【转】GPS定位原理
【转】GPS定位原理⼀、距离测定原理1、伪距测量伪距测量是利⽤全球卫星定位系统进⾏导航定位的最基本的⽅法,其基本原理是:在某⼀瞬间利⽤GPS接收机同时测定⾄少四颗卫星的伪距,根据已知的卫星位置和伪距观测值,采⽤距离交会法求出接收机的三维坐标和时钟改正数。
伪距定位法定⼀次位的精度并不⾼,但定位速度快,经⼏⼩时的定位也可达⽶级的若再增加观测时间,精度还可以提⾼。
每⼀卫星播发⼀个伪随机测距码信号,该信号⼤约每1毫秒播发⼀次,接收仪同时复制出⼀个同样结构的信号并与接收到的卫星信号进⾏⽐较,由信号的延迟时间(dT)推算出卫星⾄接收仪的距离。
2、载波相位测距载波相位测量是利⽤GPS卫星发射的载波为测距信号。
由于载波的波长(λL1=19cm,λL2=24cm) ⽐测距码波长(λC/A=293m,λp=29.3m)要短得多,因此对载波进⾏相位测量,就可能得到较⾼的测量定位精度。
整周未知数N的确定是载波相位测量中特有的问题,也是进⼀步提⾼GPS定位精度、提⾼作业速度的关键所在。
⽬前,确定整周未知数的⽅法主要有三种:伪距法、N作为未知数参与平差法和三差法。
考虑到GPS定位时的误差来源,当前普遍采⽤的观测量线性组合⽅法称之为差分法,其具体形式有三种,即所谓的单差法、双差法和三差法。
⼆、点位测定原理当只有⼀颗卫星时,我们只能确定以 R1为半径的圆上的某个点上。
当有两颗卫星时,2个球⾯相交成⼀个圆弧点位被限制在⼀曲线上。
当只有三颗卫星时,3个球⾯相交成⼀个点,3个距离段可以确定纬度,经度,和⾼程,点的空间位置被确定。
当只有四颗卫星时,4段或更多的距离就解决了纬度,经度,⾼程和时间四个未知数,这就类似于测边交会问题的解决原理。
多颗卫星不间断地发送⾃⾝的星历参数和时间信息,⽤户接收到这些信息后,经过计算求出接收机的三维位置,三维⽅向以及运动速度和时间信息。
从以上原理我们可以知道,在GPS测量时,⾄少需要四颗卫星即可进⾏测量,但由于卫星信号的误差源⽐较多,想要得到更⾼精度的点位精度或在进⾏RTK测量时,必须要在五⾥颗以上才能保证测量的精度。
基于距离的定位原理

基于距离的定位原理怎么知道这个距离呢?这里面就有好多小妙招啦。
有一种办法是通过信号传播的时间来算距离。
就像你喊一嗓子,声音传到朋友耳朵里需要一定时间,这个时间乘以声音的速度,就大概能知道你们之间的距离了。
信号也是这样,信号塔发出信号到你的手机收到信号,这个时间差一测出来,再根据信号传播速度,就能算出距离啦。
然后呢,知道了手机到这三个信号塔的距离之后,就可以开始定位啦。
这就像是在玩一个找宝藏的游戏。
每个信号塔的位置是已知的,就像宝藏的线索一样。
以每个信号塔为圆心,以算出来的距离为半径画个圆。
你会发现,这三个圆会相交在一个点上,这个点就是你的手机所在的位置啦。
是不是很神奇呢?这原理在很多地方都超级有用呢。
比如说在地图导航里。
你开车在路上,那些卫星就像是高高在上的信号塔。
卫星通过发射信号,然后计算出和你的汽车(其实是汽车上的定位设备)之间的距离,然后就能在地图上准确地显示出你的位置啦。
这样你就不会在那些弯弯绕绕的路上迷路啦。
再说说在一些大型的室内场所,像机场或者展览馆。
有时候里面布局很复杂,但是通过在不同位置设置一些小的信号发射装置,就可以根据距离来定位你在这个大场所里的位置。
这样工作人员就能快速地找到你,或者给你提供准确的引导,比如说告诉你最近的洗手间在哪里呀,或者你要找的登机口怎么走呀。
但是呢,科学家们也一直在想办法解决这些问题。
就像给这个定位系统穿上一层保护罩一样,让它尽量不受干扰。
比如说采用更先进的信号处理技术,或者多设置一些信号源来提高定位的准确性。
咱们再举个例子哈,就像在一个大的游乐园里。
游乐园里有好几个标志性的游乐设施,它们就像是那些已知位置的信号源。
你戴着一个有定位功能的手环,这个手环就可以根据它和这些游乐设施之间的距离来确定你的位置。
这样的话,要是你和小伙伴走散了,工作人员就可以通过定位很快找到你,把你送到小伙伴身边啦。
而且呢,游乐园还可以根据你的位置给你推送一些好玩的项目信息,比如说你离某个超刺激的过山车很近了,它就可以给你发个小提示,问你要不要去体验一下呢。
GPS定位原理和简单公式
GPS定位原理和简单公式GPS是全球定位系统的缩写,是一种通过卫星系统来测量和确定地球上的物体位置的技术。
它利用一组卫星围绕地球轨道运行,通过接收来自卫星的信号来确定接收器(GPS设备)的位置、速度和时间等信息。
GPS定位原理基于三角测量原理和时间测量原理。
1.三角测量原理:GPS定位主要是通过测量接收器与卫星之间的距离来确定接收器的位置。
GPS接收器接收到至少4颗卫星的信号,通过测量信号的传播时间得知信号的传播距离,进而利用三角测量原理计算出接收器的位置。
2.时间测量原理:GPS系统中的每颗卫星都具有一个高精度的原子钟,接收器通过接收卫星信号中的时间信息,利用接收时间和发送时间之间的差值,计算出信号传播的时间,从而进一步计算出接收器与卫星之间的距离。
简单的GPS定位公式:1.距离计算公式:GPS接收器与卫星之间的距离可以通过测量信号传播时间得到。
假设接收器与卫星之间的距离为r,光速为c,传播时间为t,则有r=c×t。
2.三角测量公式:GPS定位是通过测量与至少4颗卫星的距离,来计算接收器的位置。
设接收器的位置为(x,y,z),卫星的位置为(x_i,y_i,z_i),与卫星的距离为r_i,根据三角测量原理,可得到以下方程:(x-x_1)^2+(y-y_1)^2+(z-z_1)^2=r_1^2(x-x_2)^2+(y-y_2)^2+(z-z_2)^2=r_2^2...(x-x_n)^2+(y-y_n)^2+(z-z_n)^2=r_n^2这是一个非线性方程组,可以通过迭代方法求解,求得接收器的位置。
3.定位算法:GPS定位一般使用最小二乘法来进行计算。
最小二乘法是一种数学优化方法,用于最小化误差的平方和。
在GPS定位中,通过最小化测量距离与计算距离之间的差值的平方和,来确定接收器的位置。
总结:GPS定位原理基于三角测量和时间测量原理,通过测量接收器与卫星之间的距离,利用三角测量公式和最小二乘法来计算接收器的位置。
GPS测距定位基本原理

14
h语句的应用
1. GPS定位方法分类
定 绝对定位 位 方 式
相对定位
静态定位 动态定位
静态定位 动态定位
15
h语句的应用
❖绝对定位
▪ 将接收机安置在固定点上观测数分钟或更长时间,以 确定该点三维坐标。
▪ 在一个待定点上,利用GPS接收机观测4颗以上的GPS 卫星,独立确定待定点在地固坐标系的位置(目前为 WGPS-84坐标系),称之为绝对定位。
31
h语句的应用
伪距法绝对定位原理
❖ 设GPS标准时为T,卫星钟面时间tj 接收机钟面时间tk 卫星与标准时偏
差δtj 接收机与标准时偏差δtk
▪ tj =Tj+ δtj tk = Tk +δtk
'ctk ctj
' [ X j X k ] 2 [ Y j Y k ] 2 [ Z j Z k ] 2 c t k c tj
星定位。 ❖ 定位除依据星座的几何构图外,还必须有准确的定
时。 ❖ GPS卫星导航系统的定位精度取决于卫星和用户间
的几何结构、卫星星历精度、GPS系统时同步精度、 测距精度和机内噪声等诸因素的组合。
2
h语句的应用
GPS系统的定位步骤:
❖ 跟踪、选择卫星、接收选定卫星的信号。 ❖ 解读、解算出卫星位置。 ❖ 测量得到卫星和用户之间的相对位置。 ❖ 解算得到用户的最可信赖位置。
▪ 在相对定位中,至少其中一点或几个点的位置是已知的, 即其在WGS-84坐标系的坐标为已知,称之为基准点。
❖相对定位是高精度定位的基本方法
▪ 广泛应用于高精度大地控制网、精密工程测量、地球动 力学、地震监测网和导弹和火箭等外弹道测量方面。
17
基于距离的定位算法
基于距离的定位算法是一种利用物体之间的距离信息来确定其相对位置的算法。
它通常用于定位和导航系统,无线传感器网络以及其他需要确定物体位置的领域。
基于距离的定位算法的实现通常依赖于以下几种技术:
1. 三角测量法:在三角测量法中,使用至少三个已知位置的参考点和物体与这些参考点之间的距离信息,通过三角计算来确定物体的位置。
这可以通过测量到参考点的信号到达时间、信号强度或者其他传感器测量的信息来实现。
2.指纹定位法:指纹定位法基于建立预先测量的物理信号指纹(如Wi-Fi信号强度、蓝牙信号、RFID信号等)与位置之间的映射关系。
在定位时,通过收集目标物体处的信号指纹并与预先建立的指纹数据库进行匹配,以确定物体的位置。
3.超声波定位法:超声波定位法是利用超声波传感器测量物体与参考点之间的距离来确定物体的位置。
通过测量超声波的传播时间或反射强度,可以计算出物体与参考点之间的距离,并进而确定物体的位置。
4.RFID定位法:RFID(射频识别)定位法利用RFID技术对物体进行识别和定位。
通过在物体上附着RFID标签,并在参考点或周围部署RFID读写器,可以实时读取物体与参考点之间的距离或相对位置,从而实现物体的定位。
这些方法在应用中各有优缺点,具体选择何种方法取决于所需的精度、成本、场景等因素。
实际应用中通常会结合多种定位技术,以提高定位的准确性和可靠性。
同时,对于室内定位、室外定位以及不同尺度的定位需求,可能存在适用的算法和技术的差异。
第五章 GPS卫星定位基本原理
5.1 概述测距交会确定点:无线电导航定位系统卫星激光测距定位系统无线电导航定位:三已知点三维定位,两个已知点平面定位.卫星大地测量中的卫星激光测距定位。
利用地面上三个已知点上的卫星激光测距仪同时测定某一时刻至卫星的空间距离,从而来确定卫星的空间位置。
卫星定位的基本原理:依据测距的原理:伪距法定位,载波相位测量定位,以及差分GPS定位。
根据待定点的状态分为:静态定位(绝对定位)和动态定位(至少有一台接收机处于运动状态)和相对定位。
利用测距码或载波相位均可进行静态定位,实际为减少误差,可利用载波相位观测值的各种线性组合(即差分)作为观测值,获得两点之间高精度的GPS基线向量(即坐标差)。
5.2伪距测量伪距测量:由卫星发射的测距码信号到达GPS接收机的传播时间乘以光速所得出的量测距离。
由于卫星钟、接收机钟的误差以及无线电信号经过电离层和对流层中的延迟,实际测出距离ρ'与卫星到接收机的几何距离ρ有一定差值,因此一般称量测出的距离为伪距。
C/A 码伪距,P 码伪距。
伪距法定位测量定位精度不高(P 码定位误差约为10m ,C/A 码定位误差为20-30m ),但因其具有定位速度快,是GPS 定位系统中进行导航定位的基本方法。
作为载波相位测量中解决整波数不确定(模糊度)的辅助资料。
5.2.1 伪距测量伪距测量的基本原理:为什么采用码相关技术来确定伪距?GPS 卫星发射的测距码是按照一定规律排列的,在一个周期内,每个码对应某一特定的时间。
应该说识别出每个码的形状特征,即用每个码的某一标志即可推算出时延值τ进行伪距测量。
但实际上每个码在产生过程中都带有随机误差,并且信号经过长距离传送后也会产生变形。
所以根据码的某一标志来推算时延值τ就会产生很大的误差。
因此采用码相关技术,在自相关系数MAX R =')(τ的情况下来确定信号的传播时间τ。
由于测距码和信号在产生的过程中不可避免地带有误差,而且测距码在传播过程中还有变形,因而自相关系数往往不可能达到“1”,只能在自相关系数为最大的情况下确定伪距,此时基本对齐。
几种基于测距的定位机制原理

2 TOA 机制
x1 , y1
BS1
r1
E
x, y r2
BS2
x2 , y2
r3
x3 , y3
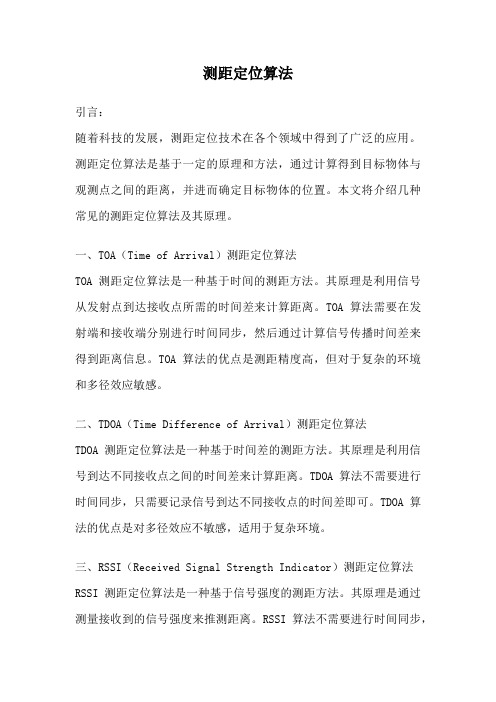
图 1 三定位站二维 TOA 定位原理
BS3
ri ti t0 c
ri 2 xi x yi y
2 2
3 TDOA 机制
x2 , y2
几种基于测距的定位机制原理
1 引言
常见的无源定位机制有:TOA 、TDOA、 AOA、RSSI 等,这些定位机制都是将其观 测量, 如到达时间(TOA) 、到达时间差(TDOA) 、 到达角度(AOA) 、 接收信号强度 (RSSI) 等转换为距离(在误差影响下为伪距) ,再根据具体的几何关系进行求解,所以都可以归为 基于测距的定位机制。 由于这些定位机制的观测量各具特点,他们的应用场景也有所不同。如 TOA 机制在系 统时间精确同步条件下可获得较高的定位精度, 多用于配合式的定位场合, 如蜂窝网移动台、 传感器网络节点的定位;与 TOA 机制相比,TDOA 机制避免了基站和待定位信号源之间的 同步,适用于非配合式定位应用,如无源雷达等;相比基于 TOA、TDOA 等基于时间测量 的定位机制,AOA 机制不需要时间同步,且实现同维度的定位任务需要的基站(参考节点) 的数量最少,二维平面定位只需要两个基站,但是接收待定位信号的基站(参考节点)必须 具备天线阵列;一般的射频芯片都具有 RSSI 测量功能,故 RSSI 机制实施简便,但易受信 道和噪声影响,在远距离定位时测距误差较大,多用于小范围(如室内)定位。
3 AOA 机制
E
x, y
F 1
r
r1 sin 1
D
定位理论的科学原理是
定位理论的科学原理是
定位理论作为一个科学原理,主要基于以下科学原理和原则:
1. 多普勒效应:多普勒效应是指当发射源或接收源相对于观察者发生运动时,波的频率会发生变化。
根据这一原理,定位系统可以通过测量接收到的信号的频率来确定发射源或接收源的相对运动情况,从而实现位置的定位。
2. 三角测量原理:三角测量原理是基于几何学中的三角形相似性原理。
通过在已知位置的测量点上测量所接收到的信号强度或到达时间差,结合已知位置和测量数据,可以利用三角测量原理计算出未知位置的坐标。
3. 信号传播模型:定位系统的原理也基于信号的传播模型。
信号的传播受到诸如自由空间传播模型、衰减模型、多径传播模型等多种因素的影响。
通过建立合理的传播模型,可以推算出信号在不同环境中的传播损耗,从而准确计算位置。
4. 时钟同步原理:为了实现高精度的定位,定位系统中的多个设备需要具备高度同步的时钟。
时钟同步原理基于时钟的稳定性和精度要求,通过全球卫星导航系统(如GPS)或其他通信方式,确保各设备的时钟同步,从而避免因时钟差异导致的误差。
5. 数学模型和算法:定位系统的科学原理还依赖于复杂的数学模型和算法。
这些数学模型和算法可以处理和分析测量数据,通过数据处理、数据融合等技术进
行位置估计和定位计算。
总之,定位理论的实现基于多普勒效应、三角测量原理、信号传播模型、时钟同步原理以及数学模型和算法等科学原理和技术手段。
这些原理和技术的结合可以实现高精度的定位,应用于各种领域,如导航、无人机、车辆定位、室内定位等。
测距定位算法范文
测距定位算法范文
在实际应用中,测距定位算法涉及到多个领域,比如地理定位、无人
驾驶、机器人导航等。
测距定位算法的主要目标是提供准确的距离测量和
位置估计,以满足具体应用需求。
常用的测距定位算法包括以下几种:
1.超声波测距:超声波测距是通过发射超声波脉冲,利用回声的反射
时间和声速来计算距离。
超声波测距通常用于室内定位、避障等场景。
2.激光测距:激光测距是利用激光束的传播速度和反射光束的时间差
来计算距离。
激光测距通常适用于室内外的长距离测距和高精度定位。
3.GPS定位:GPS定位是通过接收卫星发射的信号来计算位置和测量
距离。
GPS定位适用于户外定位和导航应用,但在室内环境下信号容易受
到干扰。
在实际应用中,测距定位算法通常结合多个传感器和数据源进行融合,提高定位的准确性和可靠性。
融合的方式可以是简单的水平加权融合,也
可以是基于概率的贝叶斯滤波器。
除了传感器数据的融合,测距定位算法还需要考虑误差校正、信号噪
声处理、建模方法等问题。
误差校正可以通过校准传感器和仪器来完成,
信号噪声处理可以通过滤波器和滑动平均法等方法来实现,建模方法可以
使用几何模型、数学模型和统计模型等。
总之,测距定位算法是一种通过测量距离来确定物体位置的方法。
在
实际应用中,需要根据具体情况选择合适的测距技术和算法,并进行数据
融合、误差校正与信号处理等步骤,以提高定位的准确性和可靠性。
基于距离的定位算法

基于距离的定位算法基于距离的定位算法是一种通过计算设备与参考点之间的距离来确定设备位置的方法。
这种定位算法可以广泛应用于室内定位、导航系统、智能交通系统等领域。
本文将介绍基于距离的定位算法的原理、应用以及优缺点。
基于距离的定位算法主要依靠测量设备与一组已知位置的参考点之间的距离来进行定位。
这些参考点可以是无线信号发射器、基站、天线等设备。
通常情况下,设备与参考点之间的信号传输会受到衰减、干扰、多径等因素的影响,从而影响了测量距离的准确性。
因此,基于距离的定位算法一般会使用多个参考点来进行定位,并且会采用一些方法来消除测量误差。
基于距离的定位算法有多种实现方法,其中最常见的是基于信号强度指示(RSSI)和到达时间差(Time of Arrival,TOA)的算法。
基于RSSI的算法通过测量设备接收到的参考点发射器信号的强度来推断设备与参考点之间的距离。
这种算法的原理是信号的传播强度会随着距离的增加而减弱,因此通过测量信号强度可以估算设备距离参考点的距离。
基于RSSI的算法简单且成本较低,但在室内环境中由于多径效应和干扰的存在,其准确性较低。
而基于TOA的算法则是通过测量信号从发射到接收的时间差来推算设备距离参考点的距离。
这种算法的原理是信号的传播速度是已知的,通过测量时间差可以计算出距离差值。
基于TOA的算法具有较高的准确性,但是要求设备具有精确的时间同步,且实现成本较高。
除了基于RSSI和TOA的算法外,基于角度差(Angle of Arrival,AoA)的算法也是基于距离的定位算法中的一种常见方法。
这种算法通过测量设备与多个参考点之间的角度差来推算设备的位置。
具体的实现方式包括天线阵列、超宽带等。
基于AoA的算法具有较高的定位精度,但需要设备具备复杂的硬件结构和较高的计算能力。
基于距离的定位算法在室内定位、导航系统等领域有广泛的应用。
在室内定位中,可以通过部署一组无线信号发射器来推算设备的位置,从而实现室内导航、定位服务等功能。
基于测距的定位方法

基于测距的定位方法超声波测距是一种基于声波传播速度的测距方法。
通过发送一个高频声波信号,然后测量声波从发射源到目标物体再返回接收源的时间,从而计算出物体与发射源之间的距离。
超声波测距的精度相对较低,通常在几厘米到几米之间,适用于室内定位和距离较近物体的测量。
激光测距是一种基于激光束的测距方法。
通过发射一个激光束,然后测量激光束从发射源到目标物体再返回接收源的时间,从而计算出物体与发射源之间的距离。
激光测距的精度较高,通常在毫米级别,适用于需要高精度定位的应用,如无人驾驶和机器人导航。
无线信号测距是一种基于信号传播时间的测距方法。
通过发送一个无线信号(如Wi-Fi、蓝牙或RFID信号),然后测量信号从发送源到接收源的传播时间,从而计算出物体与发送源之间的距离。
无线信号测距的精度相对较低,受到信号传播环境的影响,适用于室内定位和低精度应用。
基于测距的定位方法可以单独应用,也可以与其他定位技术相结合使用,例如惯性导航和卫星定位系统(GPS)。
通过将测距的结果与其他定位数据进行融合,可以提高定位的准确性和鲁棒性。
例如,在室内环境中,可以使用超声波或激光测距与惯性导航相结合,以提供更准确的位置估计。
基于测距的定位方法在许多领域中都有广泛应用。
在室内环境中,可以使用超声波或无线信号测距来提供精确的室内定位和导航。
在无人驾驶领域,可以使用激光测距和无线信号测距来进行精确的环境感知和导航。
在物流和仓储领域,可以使用无线信号测距来跟踪和管理物品位置。
总之,基于测距的定位方法是一种通过测量物体与参考点之间的距离来确定物体位置的技术。
它可以使用超声波、激光和无线信号等不同的测距方法,可单独应用或与其他定位技术相结合使用。
这种方法在许多领域中都有广泛应用,并且不断发展和创新,以提供更准确和可靠的定位解决方案。
测距传感器原理
测距传感器原理
测距传感器是一种能够测量物体离传感器的距离的设备。
它采用了不同的原理和技术来实现距离的测量,其中包括以下几种常见的原理:
1. 音频测距:这种原理利用声波的传播速度和回波时间来计算物体的距离。
测距传感器发出一个声波信号,当这个信号遇到物体后被反射回来,传感器会计算声波的传播时间并据此计算出距离。
2. 激光测距:激光测距传感器利用激光光束的散射和接收光线的时间差来计算物体的距离。
传感器发射一个窄束的激光光束,当光束照射到物体上时,一部分光会被反射回传感器。
传感器通过计算激光传播的时间来确定物体的距离。
3. 红外线测距:这种原理利用红外线的发射和接收来测量物体的距离。
红外线传感器发射一个红外线信号,当这个信号与物体相交时,一部分红外线会被反射回传感器。
传感器可以通过计算红外线信号的时间差来计算出物体的距离。
这些原理都可以在测距传感器中被应用,并根据不同的需求选择合适的原理和技术。
无论采用哪种原理,测距传感器都可以在工业自动化、机器人和机器视觉等领域中得到广泛应用。
常见的定位方法及原理

常见的定位方法及原理
常见的定位方法包括全球定位系统(GPS)、惯性导航系统(INS)、地标识别、无线信号定位和视觉定位等。
1. 全球定位系统(GPS):GPS是一种通过卫星进行定位的全球导航卫星系统。
它通过接收来自多颗卫星的信号,并利用这些信号计算接收器的位置,从而实现定位功能。
原理是根据接收到的卫星信号的时间差来计算距离,并使用至少三颗卫星的信号交叉点确定位置。
2. 惯性导航系统(INS):惯性导航系统是一种通过测量速度和加速度来估计位置的定位系统。
它使用加速度计和陀螺仪等传感器来测量移动物体的加速度和角速度,通过积分这些测量值的时间变化来计算物体的位置和方向。
3. 地标识别:地标识别是一种使用机器视觉技术来识别和定位环境中特定地标的方法。
它通过收集环境中的图像或视频,并对其中的地标进行识别,从而确定位置。
地标可以是建筑物、道路标志或其他突出特征。
4. 无线信号定位:无线信号定位是一种利用无线通信信号来确定设备位置的方法。
它通过测量设备接收到的信号强度、时间延迟或多普勒频移等参数,并结合预先建立的信号传播模型,计算设备的位置。
5. 视觉定位:视觉定位是一种利用摄像头或摄像设备捕捉环境图像,并通过分
析图像中的特征,如物体形状、纹理等来确定位置的方法。
视觉定位可以使用特征匹配、结构光、SLAM(同时定位与地图构建)等技术实现。
WSN基于测距的定位方法

WSN基于测距的定位方法无线传感网络(Wireless Sensor Network,WSN)是由大量的分布式感知节点组成的网络系统,这些节点可以感知、收集和传输环境信息。
在WSN中,节点之间的位置信息对于许多应用(例如环境监测、目标追踪和灾害预警等)都是至关重要的。
因此,WSN基于测距的定位方法被广泛研究和应用。
WSN基于测距的定位方法可以分为无线信号强度定位法和时间差测量定位法。
无线信号强度定位法是一种利用节点之间的相对信号强度来估计位置的方法,而时间差测量定位法是通过测量节点之间信号传播的时间差来确定位置的方法。
无线信号强度定位法是一种常用的基于测距的定位方法,它的基本原理是节点之间的信号强度随着距离的增大而减小。
在这种方法中,需要事先对节点的信号传播特性进行建模,通过对实际信号和理论模型之间的比较,可以估计出节点之间的距离。
常用的模型包括二次衰减模型和对数正态模型。
通过测量信号的接收功率或信噪比,可以获得节点之间的距离估计值。
然后,通过多个节点的距离估计值进行三角定位或最小二乘定位,可以得到更准确的位置估计结果。
时间差测量定位法是另一种常用的基于测距的定位方法,它的基本原理是节点之间的信号传播速度是已知的,通过测量信号传播的时间差来计算节点之间的距离。
根据信号的发送和接收时间戳,可以计算出信号的传播时间差。
如果节点的时间同步已知,可以直接通过时间差计算节点之间的距离。
否则,需要通过额外的步骤来进行时间同步,例如使用GPS进行时间同步或利用节点之间的信号同步技术。
除了上述的基本方法,还可以结合其他技术来提高定位的准确性和可靠性。
例如,可以使用多址技术来实现多个节点同时向目标节点发送信号,从而提高测距的精度。
此外,还可以利用地理信息、环境特征和多传感器融合等方法来辅助定位。
总之,WSN基于测距的定位方法是一种常用的定位技术,它可以通过信号强度或时间差来估计节点之间的距离,进而实现位置的估计。
基于测距的定位方法
基于测距的定位方法时间测距是通过测量信号的传播时间来确定物体位置的方法。
在时间测距中,一般采用超声波、雷达或红外线等无线信号作为测距信号。
发送方发射信号后,接收方接收到信号,并计算出信号传播的时间。
根据信号传播的速度和时间,可以计算出物体到发射方的距离。
通过多个发射方和接收方的组合,可以确定物体的二维或三维位置。
时间测距的准确性主要取决于信号传播的速度和测量时间的精度。
超声波和雷达信号传播速度较快,可以实现较高的定位精度。
而红外线信号的传播速度较慢,定位精度较低。
信号强度测距是通过测量信号的强度来确定物体位置的方法。
在信号强度测距中,一般采用无线信号的衰减模型来计算物体与信号源之间的距离。
衰减模型可以根据实际环境中信号的传播特性来确定,如自由空间模型、多径补偿模型等。
通过测量收到的信号强度,可以根据衰减模型计算出物体到信号源的距离。
信号强度测距的准确性主要取决于衰减模型的准确性和信号强度的测量精度。
在实际应用中,由于环境干扰、多径效应等因素的影响,信号强度测距的精度较低。
因此,通常需要结合其他定位方法来实现更高的定位精度。
基于测距的定位方法在无线通信、定位导航等领域有着广泛的应用。
例如,在室内定位中,可以利用WiFi信号的强度测距,结合地图信息来实现室内导航。
在农业领域,可以利用超声波测距来实现植物高度的测量。
在工业自动化中,可以利用雷达测距来实现物体的避障和定位等。
总结起来,基于测距的定位方法是一种通过测量信号的传播时间或信号的强度来确定物体位置的技术。
它可以应用于无线通信、定位导航、环境监测等多个领域,并且具有一定的准确性和应用灵活性。
不过,对于信号传播速度和测量精度的控制,以及环境干扰的处理等方面还需要进一步研究和改进,以提高定位精度和应用范围。
测绘技术中的导航定位原理解析

测绘技术中的导航定位原理解析导航定位是现代测绘技术中的一个重要领域,它通过利用卫星、地面设备等手段,确定一个地点的空间坐标或者位置信息。
导航定位技术在航空、航海、地质勘探等行业都发挥着重要的作用。
本文将对测绘技术中的导航定位原理进行解析。
一、全球定位系统(GPS)全球定位系统(GPS)是当今最为广泛使用的导航定位技术之一。
它由一组位于轨道上的卫星和地面控制站组成,能够提供全球范围内的定位及导航服务。
GPS 原理利用了卫星与接收器之间的电磁波传播时间差来计算距离,通过至少三颗卫星的信号交会,可以确定接收器的位置。
二、惯性导航系统惯性导航系统是一种基于惯性传感器(加速度计、陀螺仪)的定位技术。
它的原理是通过测量物体的加速度和角速度来估计位置和方向。
由于惯性传感器具有高精度和高灵敏度的特点,因此在航空航天、导弹制导等领域得到广泛应用。
三、北斗卫星导航系统北斗卫星导航系统是中国自主研发的导航定位技术。
与GPS类似,北斗系统通过卫星与接收机之间的信号传输来实现定位。
北斗系统具有覆盖范围广、定位精度高、应用场景多样化等特点,正在逐步取代GPS成为全球导航定位领域的重要力量。
四、电波定位系统电波定位系统是一种基于无线电波传播的定位技术。
这种系统通过测量无线电信号从发射信号源到接收器之间的时间差,来计算距离和方位。
电波定位系统广泛应用于雷达、通信等领域,具有定位精度高、抗干扰能力强等优势。
五、测边定位技术测边定位技术是一种通过测量边长和角度来确定位置的方法。
在地面测绘中,使用测边仪或者全站仪测量地物边长和角度,然后利用三角测量原理计算出目标地点的位置坐标。
这种方法适用于近距离测量和小范围定位。
六、无线红外定位技术无线红外定位技术利用红外信号的传输和接收来实现定位。
这种技术常用于室内定位,如无线红外阵列信标系统。
接收器通过接收不同位置红外信号的强度和时间差,来确定自身的位置。
无线红外定位技术具有低成本、低功耗等优点,适用于人体定位和无线网络等领域。
测距定位算法
测距定位算法引言:随着科技的发展,测距定位技术在各个领域中得到了广泛的应用。
测距定位算法是基于一定的原理和方法,通过计算得到目标物体与观测点之间的距离,并进而确定目标物体的位置。
本文将介绍几种常见的测距定位算法及其原理。
一、TOA(Time of Arrival)测距定位算法TOA测距定位算法是一种基于时间的测距方法。
其原理是利用信号从发射点到达接收点所需的时间差来计算距离。
TOA算法需要在发射端和接收端分别进行时间同步,然后通过计算信号传播时间差来得到距离信息。
TOA算法的优点是测距精度高,但对于复杂的环境和多径效应敏感。
二、TDOA(Time Difference of Arrival)测距定位算法TDOA测距定位算法是一种基于时间差的测距方法。
其原理是利用信号到达不同接收点之间的时间差来计算距离。
TDOA算法不需要进行时间同步,只需要记录信号到达不同接收点的时间差即可。
TDOA算法的优点是对多径效应不敏感,适用于复杂环境。
三、RSSI(Received Signal Strength Indicator)测距定位算法RSSI测距定位算法是一种基于信号强度的测距方法。
其原理是通过测量接收到的信号强度来推测距离。
RSSI算法不需要进行时间同步,只需要对信号强度进行测量即可。
然而,RSSI算法的测距精度较低,容易受到环境影响。
四、AOA(Angle of Arrival)测距定位算法AOA测距定位算法是一种基于角度的测距方法。
其原理是利用接收到信号的入射角度来计算距离。
AOA算法需要在接收端使用多个天线阵列来测量信号的入射角度,然后通过三角定位原理计算距离。
AOA算法的优点是测距精度高,但需要复杂的硬件设备和算法实现。
五、ToF(Time of Flight)测距定位算法ToF测距定位算法是一种基于飞行时间的测距方法。
其原理是利用信号从发射点到达接收点所需的时间来计算距离。
ToF算法需要在发射端和接收端分别进行时间同步,然后通过计算信号传播时间来得到距离信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x1 , y1
1
y yi ri sin i
BS1
r1 cos1
r2 cos 2
相比基于TOA、TDOA等基于时间测量的定位机制,AOA 机制不需要时间同步,且实现同维度的定位任务需要的基 站(参考节点)数量最少,例如二维平面定位只需要两个 基站,但是接收待定位信号的基站(参考节点)必须具备 天线阵列 ,通常和TOA机制联合使用,以提高定位精度
TOA定位原理
x1 , y1
BS1
r1E x, 来自 r2BS2 x2 , y2
ri ti t0 c
ri xi x yi y
2 2 2
r3
x3 , y3
BS3
c为光速
TOA定位的特点和应用场合
TOA机制在系统时间 精确同步条件下可获 得较高的定位精度, 多用于配合式的定位 场合,如蜂窝网移动 台、传感器网络节点 的定位
2 2
2 2
x1 x y1 y
TDOA定位的特点和应用场合
TDOA机制避免了基站和待定位 信号源之间的同步,适用于非配 合式定位应用,如无源雷达等
AOA定位原理及其特点
E
x, y
F 1
r
r1 sin 1
D
r2 E
2
x xi ri cos i
x2 , y2
几种基于测距的定位机制原理及其特点
• 常见的无源定位机制有:TOA 、TDOA、 AOA、 RSSI等
• 这些定位机制都是将其观测量,如到达时间 (TOA)、到达时间差(TDOA)、到达角度 (AOA)、接收信号强度(RSSI)等转换为距离 (在误差影响下为伪距),再根据具体的几何关 系进行求解,所以都可以归为基于测距的定位机 制。
10.0 mm x 10.0 mm
RSSI定位原理及其特点
典型的无线信道模型:
d Pd P0 10n log d0
Pd 基站接收到的信号强度
距离辐射源 d0 处的信号强度 P 0
n 信道衰减系数
RSSI定位特点及应用场合
一般的射频芯片都具有 RSSI测量功能,故 RSSI机制实施简便,但 易受信道和噪声影响, 在远距离定位时测距误 差较大,多用于小范围 (如室内)定位。
TDOA定位原理
ri1 ti t0 c t1 t0 c ti t1 c
E
x2 , y2
BS2
r2
x1 , y1 BS1
r1
r3
BS3
2 ri1 ri 2 r12
x3 , y3
xi x yi y