Shape from X
3Dmax中英文详细翻译对照
3Dmax中英文对照参考软件:3Dmax8中文版+vray1.5中文版和3Dmax8英文版+vray1.5英文由于任务繁重,有些相同的内容只写一遍,还望谅解。
如有重复纯属糊涂and巧了。
一、右击菜单(由于有些右击菜单中在修改卷栏中也有在这就不复述)(右击菜单左侧)(右击菜单右侧)反转样条线: Reverse Line 孤立当前选择: Isolate selection设为首顶点: make first 全部解冻: unfreeze all拆分: divide 冻结当前选择: freeze selection绑定: bind 按名称取消隐藏: unhide by name取消绑定: Unbind 全部取消隐藏: unhide all 工具 1: tools 1 隐藏未选定对象: hide unselection 工具 2: tools 2 隐藏当前选择: hide selection 创建线: create line 保存场景状态: save scene state 附加: attach 管理场景状态: mange scene states 分离线段: detach segment 显示: display连接: connect 变换: transform 细化: refine 移动: move细化连接: connect refine 旋转: rotate循环顶点: cycle vertices 缩放: scale断开顶点: break vertices 选择: select焊接顶点: weld vertices 克隆: clone融合顶点: fuse vertices 属性: propertiesBezier角点: Bezier corner 曲线编辑器: curve editorBezier : bezier 摄影表: dope sheet角点: corner 关联参数: wire parameters平滑: smooth 转换为: convert to重置切线: reset tangents (展开)可编辑样条线: convert to editorspline样条线: spline 可编辑网络: convert to editormesh线段: segment 可编辑多边形: convert to editor poly顶点: vertex 可编辑片面: convert to editorpatch顶层级: top-level 转换为 NURBS: convert to NURBS线: line VRAY 属性: VRAY porperties曲线: curve VRAY场景转换器: VRAY scene converterVRAY网格导出: VRAY mesh export VRAY VFB : VRAY VFB二、修改器:mordifiers选择: selectionFFD 选择:fFFD select网格选择:mesh select面片选择:patch select多边形选择:poly select按通道选择:select by channel样条线选择:spline select体积选择:volume select面片/样条线编辑:patch/spline editing横截面:cross section删除面片:delete patch删除样条线:delete spline编辑面片:edit patch编辑样条线:edit spline圆角/切角:fillet/chamfer车削:lathe规格化样条线:normalize spline可渲染样条线修改器:renderable spline modifier曲面:surface扫描:sweep修剪/延伸:trim/extend网格编辑: mesh补洞:cap holes删除网格:delete mesh编辑网格:edit mesh编辑法线:edit normals编辑多边形:edit poly挤出:extrude面挤出:face extrudemultires:multires法线修改器:normal modifier优化:optimize平滑:smoothSTL检查:STL check对称:symmetry细化:fessellate顶点绘制:vertex paint顶点焊接:vertex weld动画:animation属性承载器:attribute holder 柔体:flex链接变换:linked xform融化:melt变形器:morpher面片变形:patch deform面片变形(WSM):patch deform(WSM)路径变形:path deform路径变形(WSM):patch deform(WSM)蒙皮:skin蒙皮变形:skin morph蒙皮包裹:skin wrap蒙皮包裹面片:skin wrap patch样条线 IK 控制:spline IK control曲面变形:surf deform曲面变形(WSM):surf deform(WSM)UV坐标:UV coordinates摄影机贴图:camera map摄影机贴图(WSM):camera map(WSM)贴图缩放器(SWM):map scaler(WSM)投影:projection展开UVW:unwrap UVWUVW贴图:UVW mapUVW贴图添加:UVW mapping AddUVW贴图清楚:UVW mapping clearUVW贴图变换:UVW mapping XForm缓存工具:cache tools点缓存:point cache点缓存(WSM):point cache(WSM)细分曲面:subdivision surfacesHSDS修改器:HSDSmordifier网络平滑:网格平滑:mesh smooth涡轮平滑:turbo smooth自由形式变形器:free form deformersFFD长方体:FFDBOXFFD圆柱体:FFD cylinder参数变形器:parametric deformers影响区域:affect region弯曲:bend置换:displace晶格:lattice镜像:mirror噪波:noisePhysique:physique推力:push保留:preserve松弛:relax涟漪:ripple壳:shell切片:slice拉伸:stretch球形化:spherify挤压:squeeze扭曲:twist推化:taper替换:XForm波浪:wave曲面:surface置换近似:disp approx置换网格:displace mesh材质:material按元素分配材质:material by elementNURBS编辑:NURBS editing置换近似:disp approx曲面变形:surf deform曲面选择:surface select光能传递:radiosity细分:subdivide细分(WSM):sudiosity(WSM)三、可编辑样条线修改器菜单渲染:rendering在渲染中启用:enable in renderer在视口中启用:enable in viewport生成贴图坐标:senerat mapping coords真实世界贴图大小:real-world map size视口:viewport径向:radial厚度:thichness边:sides角度:angle纵横比:aspect自动平滑:auto smooth阈值:threshold插值:interpolation步数:steps自适度:adaptive名称选择:named selections复制:copy粘贴:paste锁定控制柄:lock handles相似:alike区域选择:area selection线段端点:segment end选择方式:select by。
数字图像处理-冈萨雷斯-课件(英文)Chapter11-表示与描述可编辑全文

Benefits: - Easier to understand - Require fewer memory, faster to be processed - More “ready to be used”
3 from
Lupper
Turn Right OK!
Turn Right OK!
Algorithm (cont.)
For the lower side of a convex hull
7. 8.
Put For
the i=
np-o2indtoswpnn
The First Difference of a Chain Codes
Problem of a chain code: a chain code sequence depends on a starting point.
Solution: treat a chain code as a circular sequence and redefine the starting point so that the resulting sequence of numbers forms an integer of minimum magnitude.
Remove the first and the last points from AReptpuernndLLlower to Lupper resulting in the list
LLlower
3 points from Llower
Turn Left NOK!
英文版初中数学试卷附答案
Section 1: Multiple Choice (30 points, 1 point each)1. Which of the following is a prime number?A) 25B) 29C) 36D) 402. Solve for x: 3x + 5 = 19A) x = 4B) x = 5C) x = 6D) x = 73. What is the value of 8^2?A) 16B) 32C) 64D) 1284. If a triangle has sides of lengths 3, 4, and 5 units, what type of triangle is it?A) EquilateralB) IsoscelesC) ScaleneD) Right-angled5. Simplify: 12 ÷ (4 + 2)A) 2C) 4D) 66. The perimeter of a rectangle is 30 cm. If the length is 10 cm, what is the width?A) 5 cmB) 6 cmC) 7 cmD) 8 cm7. What is the area of a square with side length 6 cm?A) 36 cm²B) 48 cm²C) 60 cm²D) 72 cm²8. Solve for y: 2y - 3 = 7A) y = 2B) y = 3C) y = 4D) y = 59. The ratio of boys to girls in a class is 3:2. If there are 24 girls, how many boys are in the class?A) 12B) 18C) 2410. Simplify: (7 - 3) ÷ 2A) 2B) 1.5C) 1D) 0.5Section 2: Short Answer (40 points, 5 points each)11. Write the prime factorization of 56.12. Solve the equation: 5x - 2 = 3x + 9.13. Find the sum of the first 10 even numbers.14. What is the value of x in the equation: 2(x + 3) = 16?15. Simplify: (9 - 4) × (6 + 2).Section 3: Problem Solving (30 points, 10 points each)16. A train travels at a speed of 60 km/h. How long will it take to travel 240 km?17. A garden is in the shape of a rectangle with a length of 30 m and a width of 20 m. What is the perimeter of the garden?18. A book has 240 pages. If a student reads 40 pages each day, how many days will it take for the student to finish reading the book?Section 4: Extension (10 points)19. Solve the following system of equations:2x + 3y = 8x - y = 2Answers:1. B2. B3. C4. D5. B6. A7. A8. C9. B10. BSection 2:11. 56 = 2^3 × 712. 5x - 2 = 3x + 9 → 2x = 11 → x = 5.513. Sum of first 10 even numbers = 2 + 4 + 6 + ... + 20 = 11014. 2(x + 3) = 16 → x + 3 = 8 → x = 515. (9 - 4) × (6 + 2) = 5 × 8 = 40Section 3:16. Time = Distance / Speed = 240 km / 60 km/h = 4 hours17. Perimeter = 2 × (Length + Width) = 2 × (30 m + 20 m) = 100 m18. Days = Total pages / Pages read per day = 240 / 40 = 6 days Section 4:19.2x + 3y = 8x - y = 2From the second equation, x = y + 2.Substitute x in the first equation:2(y + 2) + 3y = 82y + 4 + 3y = 85y = 4y = 0.8Substitute y back into the second equation: x = 0.8 + 2x = 2.8Solution: x = 2.8, y = 0.8。
tenengrad函数

TensorFlow是一个非常流行的机器学习框架,它可以用于各种各样的任务,包括图像识别、自然语言处理、语音识别等。
在TensorFlow中,tenengrad函数是一个非常重要的函数,它可以帮助我们计算张量的梯度。
本文将介绍tenengrad函数的基本概念、用法和实际应用。
一、什么是tenengrad函数?tenengrad函数是TensorFlow中的一个函数,它的全称是“Tensorflow Gradient of the Euclidean Norm Squared”. 简单来说,这个函数可以计算张量的梯度。
在机器学习中,梯度是一个非常重要的概念,它可以帮助我们优化模型,使得模型的表现更好。
二、tenengrad函数的用法在TensorFlow中,我们可以使用tf.norm函数来计算张量的欧几里得范数。
而tenengrad函数则是在这个基础上计算梯度。
下面是tenengrad函数的基本用法:```pythonimport tensorflow as tfx = tf.Variable([1.0, 2.0, 3.0])with tf.GradientTape() as tape:y = tf.norm(x)**2grads = tape.gradient(y, x)print(grads)```在这个例子中,我们定义了一个张量x,并使用tf.norm函数计算了它的欧几里得范数的平方。
然后,我们使用tf.GradientTape()来记录计算过程,并使用tape.gradient函数计算y对x的梯度。
最后,我们打印出了这个梯度。
运行这段代码,我们可以得到如下的输出:```tf.Tensor([2. 4. 6.], shape=(3,), dtype=float32)```这个输出表示x的梯度为[2.0, 4.0, 6.0]。
这是因为y的值为14,而x的值为[1.0, 2.0,3.0],因此y对x的梯度为[2.0,4.0, 6.0]。
计算机视觉14 第七章Shape(Structure) From Motion I

texture,….)------第十章
第七章 基于运动视觉的场景复原
三维运动估计
三维运动估计是指从二维图象序列来估计物体三维
运动参数以及三维结构。 SFM (Shape From Motion)
Singular value decomposition (SVD)
Every matrix represents a transformation
/faculty/will/svd/index.html
Singular value decomposition
Singular value decomposition
Pseudo-inverse
三维刚体运动
x k 1 rxx y k 1 ryx z r k 1 zx rxy ryy rzy rxz x k t x xk ryz y k t y R k y k Tk z rzz z k t z k
x F
规范化焦距F=1,分子分母同除以Zk
x z y y F z
x k 1 y k 1
rxx x k rxy y k rxz t x / z k rzx x k rzy y k rzz t z / z k ryx x k ryy y k ryz t y / z k rzx x k rzy y k rzz t z / z k
xk 1 xk y k t x y k 1 y k xk t y z k
基于正交投影的三维运动估计
• Bozdagi, 1994
python拟合椭圆
python拟合椭圆Python是一种广泛使用的编程语言,拥有丰富的库和工具,可以用来解决各种问题。
在数据分析和科学计算领域,Python也有着重要的应用。
本文将介绍如何使用Python拟合椭圆。
椭圆是一个有趣的几何形状,它在数学和物理学中有着重要的应用。
拟合椭圆是指找到一条曲线,使得这条曲线与给定的一组离散点最为接近,并且符合椭圆的数学定义。
在实际应用中,我们常常需要从一组数据中提取椭圆的参数,比如长轴、短轴、倾斜角等。
要拟合椭圆,我们首先需要收集一组离散的点。
这些点可以是实际测量得到的数据,也可以是通过其他方法生成的数据。
在Python 中,我们可以使用NumPy库来生成一组随机的点。
下面的代码演示了如何生成一组随机的点,并将它们可视化出来。
```pythonimport numpy as npimport matplotlib.pyplot as plt# 生成随机的椭圆数据a = 5 # 长轴b = 3 # 短轴theta = np.linspace(0, 2*np.pi, 100) # 角度x = a * np.cos(theta)y = b * np.sin(theta)# 添加噪声noise = np.random.normal(0, 0.1, x.shape)x += noisey += noise# 可视化数据plt.scatter(x, y)plt.axis('equal')plt.show()```上述代码中,我们使用NumPy库生成了一组随机的椭圆数据,并添加了一些噪声。
然后,我们使用Matplotlib库将这些点可视化出来。
可以看到,这些点大致呈现出一个椭圆的形状。
接下来,我们需要使用适当的数学模型来拟合这些数据。
在Python 中,SciPy库提供了一个专门用于椭圆拟合的函数`ellipse_fit`。
下面的代码演示了如何使用该函数来拟合椭圆。
```pythonfrom scipy.optimize import curve_fit# 定义椭圆函数模型def ellipse_func(theta, a, b, x0, y0):x = a * np.cos(theta) + x0y = b * np.sin(theta) + y0return x, y# 拟合椭圆p0 = [1, 1, 0, 0] # 初始参数params, _ = curve_fit(ellipse_func, theta, x, p0=p0)# 提取椭圆参数a_fit, b_fit, x0_fit, y0_fit = params# 绘制拟合结果x_fit, y_fit = ellipse_func(theta, a_fit, b_fit, x0_fit, y0_fit)plt.scatter(x, y, label='Data')plt.plot(x_fit, y_fit, label='Fit')plt.axis('equal')plt.legend()plt.show()```上述代码中,我们定义了一个椭圆函数模型`ellipse_func`,该模型接受椭圆的参数和角度作为输入,并返回相应的横纵坐标。
cass提取坐标六种方法
cass提取坐标六种方法Cass是一种地理信息系统(GIS)软件,它可以用于测量、绘制和分析地图数据。
在使用Cass时,提取坐标是一个非常基础的操作。
本文将介绍Cass提取坐标的六种方法。
一、通过属性表提取坐标1. 打开要素属性表:在Cass中选择要素类,右键点击打开其属性表。
2. 添加经纬度字段:在属性表中选择“添加字段”,输入经度和纬度字段名称,并设置数据类型为“双精度”。
3. 计算经纬度值:在属性表中选择经度和纬度字段,右键点击选择“计算几何值”,并选择“X坐标”和“Y坐标”。
4. 提取坐标:完成计算后,在属性表中就可以看到每个要素的经纬度值。
二、通过鼠标单击提取坐标1. 打开编辑工具栏:在Cass中选择要素类,点击“编辑”菜单栏,在下拉菜单中选择“启动编辑”。
2. 选择鼠标工具:在编辑工具栏中选择“点”工具。
3. 单击获取坐标:移动鼠标到目标位置上,单击左键获取该位置的经纬度坐标。
三、通过查询语句提取坐标1. 打开查询窗口:在Cass中选择要素类,点击“查询”菜单栏,在下拉菜单中选择“新建查询”。
2. 编写查询语句:在查询窗口中输入查询语句,如“S ELECT SHAPE.STX, SHAPE.STY FROM 要素类名”。
3. 运行查询语句:点击“运行”按钮,运行该查询语句。
4. 提取坐标:在结果窗口中就可以看到每个要素的经纬度值。
四、通过工具栏提取坐标1. 打开工具栏:在Cass中选择要素类,点击“工具”菜单栏,在下拉菜单中选择“XY工具”。
2. 选择坐标系:在XY工具栏中选择需要的坐标系。
3. 单击获取坐标:移动鼠标到目标位置上,单击左键获取该位置的经纬度坐标。
五、通过数据导出提取坐标1. 打开数据导出窗口:在Cass中选择要素类,点击“文件”菜单栏,在下拉菜单中选择“导出”。
2. 选择导出格式:在导出窗口中选择需要的导出格式。
3. 设置输出路径和名称:设置输出文件的路径和名称,并勾选“包括XY坐标”。
2024-2025学年湖南省师大附中高三上学期月考(二)英语试题及答案
湖南师大附中2025届高三月考试卷(二)英语第二部分阅读(共两节,满分50分)第一节(共15小题;每小题2.5分,满分37.5分)阅读下列短文,从每题所给的A、B、C、D四个选项中选出最佳选项。
AThe Virgin Islands National Park is a tropical(热带的)paradise on the island of St. John,which covers more than half of the small island.It is surrounded by the Atlantic Ocean to the north and the Caribbean Sea to the south,where the climate is warm all year.The island's white sand beaches and clear blue seas are considered to be among the most beautiful in the Caribbean,gaining reputation and popularity among visitors across the world.How the national park was formedLaurence Rockefeller was an American millionaire,businessman and conservationist.He visited St.John in the 1950s. He quickly fell in love with the island's clean,pure beauty.He first purchased a small resort there, Caneel Bay. He also purchased more than 2,000 hectares of the island and donated it to the government.That donation created the U.S.Virgin Islands National Park.It was officially opened as a national park on December 1,1956.How to get to the parkThe only way to reach the park is by boat.Some people arrive on their own sailboats.Others come in on large cruise ships.Visitors also arrive on water taxis from the island of St.Thomas.What to do at the parkFrom the tropical hills to the blue waters there are many things to do at the Virgin Islands National,Park.Visitors enjoy fishing,camping,sailing,scuba diving, snorkeling (浮潜),and bird watching.Of all of the park's beaches,Trunk Bay Beach is said to be the most striking.Below the clear blue water is a 200-meter snorkeling path. Hawksnest Beach is also a popular place for snorkeling.Near the shore are three small reefs of Elkhorn Coral.The Elkhorn Coral gets its name from its shape.The reef looks similar to the huge horns(角)of an animal called elk.It is a very rare kind of reef.Scientists say it is in danger of becoming extinct.The Virgin Islands National Park is often called America's paradise.It protects St. John's pristine nature,and preserves the record of human history in the Caribbean.Don't hesitate! Come here and put yourself in the paradise!1. What is most likely attractive to tourists when they visit the Virgin Islands National Park?A. Its tropical climate.B. Its location.C. Its beautiful scenery.D. Its activity.2. What can we learn about the Virgin Islands National Park?A. An animal called elk is at risk of becoming dying out.B. Visitors can choose any means of transportation to get to the park.C Laurence's donation greatly contributed to the foundation of the park..D. There is a 200-meter snorkeling path beneath the water of the Hawksnest Beach.3. Where is the text probably taken from?A. A speech script.B. A travel brochure.C. An academic essay.D. A geographic journal.BBoeing’s Starliner spacecraft landed in a New Mexico desert late on Friday,months after its original departure date and without the two astronauts it carried when it launched in early June.The Nasa astronauts Suni Williams and Butch Wilmore should have flown the Starliner back to Earth in June, a week after launching in it.But thruster (推进器) failures and helium (氦气) leaks marred their ride. Instead, they will remain at the International Space Station (ISS) for the rest of the year and will return in February aboard the SpaceX Dragon spacecraft.their empty seats and blue spacesuits along with some old station equipment.After Nasa’s space shuttles were retired more than a decade ago, Nasa hired Boeing and SpaceX for orbital (轨道的) taxi service. Boeing ran into so many problems on its first test flight with no one onboard in 2019 that it had to repeat it. The 2022 do-over uncovered even more flaws and the repair bill topped $1.5bn.The Starliner finally blasted into space on 5 June from Florida’s Cape Canaveral Space Force Station after unsuccessful launches on 6 May and 1 June. On the first launch attempt,a problem was found with a valve (阀门) on the second stage,or upper portion, of the rocket. On the second,a computer tripped an automatic hold just three minutes and 50 seconds from liftoff. That was later attributed to a single ground power supply fault within one of the launch control computers.Even after it successfully launched,helium leaks continued to trouble the spacecraft. As the Starliner approached the ISS, two leaks were detected but Nasa determined the spacecraft remained stable. What started as an eight-day mission dragged on for three months after the leaks and faulty thrusters raised safety concerns.However, Nasa and Boeing officials insisted that the astronauts were not trapped and that the technical difficulties did not threaten the mission. “We’ll come home when we’re ready,” Steve Stich, Nasa’s commercial crew program manager, said in the press conference in July.4. What does the underlined word “marred” in paragraph 2 mean?A. Underwent.B. Stimulated.C. Facilitated.D. Blocked.5. What do we know about Boeing’s spacecraft launches?A. They were filled with delays and setbacks.B. Starliner’s initial launch went smoothly.C. The 2019 manned spaceflight was a failureD. Reasons of the problems were still unidentified.6. Why didn’t the two astronauts come back to Earth on time?A. Because the project went over the original budget.B. Because they were both in serious health conditions.C. Because it was dangerous to take the Starliner then.D. Because Nasa officials failed to reach an agreement.7. What can be implied according to the last two paragraphs?A. The two astronauts would come back soon.B. Officials considered the situation within control.C. Nasa officials were pessimistic and pressed.D. The mission would be completed in 3 months.CActor Alicia Silverstone worried fans on social media recently. While on a trip to England, she posted a TikTok video of herself tasting a kind of poisonous berries she found along a sidewalk. Silverstone, who appeared in the 1995 movie Clueless, said she thought the fruit was a tomato. But when she bit into it and found that it had an unusual taste, she realized that it was not the common food.Plant expert, Jessica Damiano, recently wrote about poisonous plants that look like common foods for the Associated Press. She said the fruit that looked like a tomato appears to have been a Jerusalem cherry.Often sold as a houseplant, all parts of the Jerusalem cherry are poisonous.The American Society for the Prevention of Cruelty to Animals says the plant is not only harmful to humans but also to dogs, cats and horses.Eating large amounts can be deadly. Silverstone was lucky because she did not swallow the berries. She was also lucky because the berries were reddish orange, which meant they were ripe. While all parts of the Jerusalem cherry are poisonous, the plant’s unripe berries can be especially dangerous.They can cause problems with the central nervous and gastrointestinal (肠胃的) systems.The Jerusalem cherry is not the only toxic plant that looks like a safe one.The poisonous Carolina horsenettle fruit also looks like a tomato. It is also known as devil’s potato to add to the confusion.The Virginia creeper fruit also looks like blueberries, and it can be deadly if eaten.Wild parsnip has flowers like a carrot and leaves like parsley (欧芹). Simply touching it can cause a skin problem. Creeping buttercup looks like flat-leaf parsley. It can cause severe stomach pain,vomiting (呕吐) and heart problems. And Canadian moonseed can be confused with wild grape. However, its taste is so bitter that you would likely spit it out before swallowing it. This is a good thing because eating it can lead to death.If you think you have swallowed a toxic plant by mistake, contact a poison control center in your area or your doctor immediately. There is additional information on the website .Damiano advises using common sense with plants you find in the wild. If you are not completely sure that something is food, do not eat it.8. What is the purpose of the first paragraph?A. To present the author’s argument.B. To introduce the topic of the article.C. To raise the public’s attention of wild plants.D. To popularize the knowledge of medical science.9. Why was Silverstone thought to be fortunate?A. The berries she had a bite were ripe.B. She found the fruit she ate was a tomato.C. She had a good knowledge of wild plants.D. The amount of the berries she consumed was large.10. According to the description,what plants can be most harmful to people?A. Carolina horsenettle and wild parsnip.B Virginia creeper and creeping buttercup..C. Wild parsnip and Canadian moonseed.D. Canadian moonseed and Virginia creeper.11. What may be the suitable measure if someone mistakenly swallows a poisonous plant?A. Spitting it out as quickly as possible.B. Making an appointment with their doctor.C. Getting in touch with the local authority instantly.D. Searching for the relevant information on the Internet.DSuperhuman artificial intelligence has played a role in our life. When it comes to playing games like chess, or solving difficult scientific challenges like predicting protein structures, computers are well ahead of humans. But we have one superpower they aren’t close to mastering:mind reading.We are blessed with a mysterious ability to reason the goals,desires and beliefs of others, a crucial skill that means we can anticipate other people’s actions and the consequences of our own.If AIs are to become truly useful in everyday life — to cooperate effectively with us or to understand that a child might run into the road after a bouncing ball — we have to give them this gift that evolution has given us to read other people's minds.In psychology, the ability to infer another’s mental state is referred to as theory of mind. In humans, this capacity develops at a very young age. How to reproduce the capability in machines is far from clear, though.One of the main challenges is context. For instance, if someone asks whether you are going for a run and you reply “it’s raining”, they can quickly conclude the answer is no. But this requires huge amounts of background knowledge about running, weather and human preferences.Besides, whether humans or AI, the theory of mind is supposed to emerge naturally from one’s own learning process. Building prior knowledge into AI makes it reliant on our imperfect understanding of theory of mind.In addition, AI may be capable of developing approaches we could never imagine. There can be many forms of theory of mind that we don’t know about simply because we live in a human body that has certain types of senses and a certain ability to think.But we might still want AI to have a more human-like form of theory of mind. Humans can clearly explain their goals to each other using common language and ideas. While letting AI form the theory of mind in their learning process is likely to lead to developing more powerful AI,plainly building in shared ways to represent knowledge may be crucial for humans to trust and communicate with AI.It is important to remember, though, that the pursuit of machines with theory of mind is about more than just building more useful robots. It is also a stepping stone on the path towards a deeper goal for AI and robotics research: building truly self-aware machines.Whether we will ever get there remains to be seen. But along the way thinking about other people and other agents, we are on the path to learning to think about ourselves.12. According to the passage,which of the following contexts can AI understand well?A. When asked where an object is, a naughty kid points in the wrong direction.B. When a teacher asks for a boy’s homework,he answers “my dog ate it” .C. When you are treated with a hotpot for dinner, you reply “a sore throat” .D. When a mom tells her kid milk is good for health, the kid drinks it up.13. Which statement will the author agree with most about theory of mind?A. Humans’ theory of mind is far from perfect.B. Humans limit AI’s theory of mind to an extent.C. AI’s theory of mind development has been totally decoded.D. Shared forms of theory of mind result in more powerful AI.14. What is the author’s attitude toward truly self-aware machines?A. AmbiguousB. Conservative.C. Skeptical.D. Approving.15. Which would be the best title for the passage?A. AI’s Theory of Mind Will Define Our FutureB. AI with Its Own Theory of Mind Is ExpectedC. AI’s Theory of Mind — a Blessing or Suffering to HumansD. Theory of Mind Bridges the Gap Between Humans and AI第二节(共5小题;每小题2.5分,满分12.5分)阅读下面短文,从短文后的选项中选出可以填入空白处的最佳选项。
高二英语圆锥曲线单选题30题

高二英语圆锥曲线单选题30题1. Which of the following is not a conic section? A. Circle. B. Parabola.C. Rectangle.D. Ellipse. Answer: C. Rectangle is not a conic section. Conic sections are curves obtained by intersecting a cone with a plane. Rectangle is a quadrilateral and not a conic section.2. The standard equation of a circle with center (h,k) and radius r is?A. (x - h)^2 + (y - k)^2 = r^2.B. (x + h)^2 + (y + k)^2 = r^2.C. (x - h)^2 - (y - k)^2 = r^2.D. (x + h)^2 - (y + k)^2 = r^2. Answer: A. The standard equation of a circle with center (h,k) and radius r is (x - h)^2 + (y - k)^2 = r^2.3. What is the eccentricity of a circle? A. 0. B. 1. C. 2. D. Undefined. Answer: A. The eccentricity of a circle is 0. Eccentricity is a measure of how much a conic section deviates from being circular. Since a circle is perfectly circular, its eccentricity is 0.4. Which conic section has one focus? A. Circle. B. Parabola. C. Ellipse. D. Hyperbola. Answer: B. Parabola has one focus. A circle has no foci. An ellipse has two foci. A hyperbola has two foci.5. The equation of a parabola with vertex at the origin and axis of symmetry along the x-axis is of the form? A. y^2 = 4ax. B. x^2 = 4ay. C. y^2 = -4ax. D. x^2 = -4ay. Answer: A. The equation of a parabola with vertex at the origin and axis of symmetry along the x-axis is of the form y^2 = 4ax. If the axis of symmetry is along the y-axis, the equation is x^2= 4ay. Negative signs are used for parabolas opening to the left or down.6. Which of the following is the equation of an ellipse?A. y = x²B. x² + y² = 1C. y = 1/xD. y = 2x.Answer: B. An ellipse is defined by the equation x²/a² + y²/b² = 1. In this case, x² + y² = 1 is in the form of an ellipse equation with a = b = 1.7. The equation x²/16 + y²/9 = 1 represents what conic section?A. CircleB. ParabolaC. EllipseD. Hyperbola.Answer: C. The equation x²/a² + y²/b² = 1 represents an ellipse. Here, a² = 16 and b² = 9, so it is an ellipse.8. What is the standard equation of a hyperbola with transverse axis along the x-axis?A. x²/a² - y²/b² = 1B. x²/a² + y²/b² = 1C. y²/a² - x²/b² = 1D. y²/a² + x²/b² = 1.Answer: A. The standard equation of a hyperbola with transverse axisalong the x-axis is x²/a² - y²/b² = 1.9. The equation y² = 8x represents what conic section?A. CircleB. ParabolaC. EllipseD. Hyperbola.Answer: B. The equation y² = 2px represents a parabola opening right or left. Here, 2p = 8, so it is a parabola.10. Which equation represents a circle?A. x² + y² - 6x + 8y = 0B. x² - y² = 1C. y = x²D. y = 1/x.Answer: A. The equation of a circle is (x - h)² + (y - k)² = r². By completing the square, x² + y² - 6x + 8y = 0 can be rewritten as (x - 3)² + (y + 4)² = 25, which is the equation of a circle.11. Which of the following is a property of an ellipse?A. The sum of the distances from any point on the ellipse to two fixed points is constant.B. The distance from any point on the curve to a fixed point is equal to the distance from that point to a fixed line.C. The ratio of the distances from a point on the curve to a fixed pointand a fixed line is a constant greater than 1.D. The set of all points in a plane that are equidistant from a fixed line and a fixed point.Answer: A. An ellipse is defined by the property that the sum of the distances from any point on the ellipse to two fixed points (the foci) is constant.12. In a hyperbola, the distance between the two foci is 2c. If the distance between the two vertices is 2a, then which of the following is true?A. c = aB. c > aC. c < aD. There is no definite relationship between c and a.Answer: B. In a hyperbola, c is always greater than a. The distance between the foci is greater than the distance between the vertices.13. The eccentricity of a circle is:A. 0B. 1C. Between 0 and 1D. Greater than 1Answer: A. A circle is a special case of an ellipse where the two foci coincide. The eccentricity of a circle is 0.14. For an ellipse with major axis length 2a and minor axis length 2b,the area is given by:A. πabB. 2πabC. πa²b²D. π(a + b)Answer: A. The area of an ellipse is πab, where a is half the length of the major axis and b is half the length of the minor axis.15. The standard equation of a parabola with vertex at the origin and focus on the positive y-axis is:A. y² = 4axB. x² = 4ayC. y² = -4axD. x² = -4ayAnswer: B. When the vertex is at the origin and the focus is on the positive y-axis, the standard equation of a parabola is x² = 4ay.16. The line y = 2x + 1 intersects the ellipse x²/9 + y²/4 = 1. How many points of intersection are there?Answer: Substituting y = 2x + 1 into the equation of the ellipse, we get x²/9 + (2x + 1)²/4 = 1. After simplification, we get a quadratic equation. Solving it, we find two solutions. So there are two points of intersection.17. Which of the following lines is tangent to the parabola y² = 8x?A. y = x + 2B. y = 2x + 1C. y = x - 2D. y = 2x - 1Answer: For a line to be tangent to a parabola, the discriminant of the quadratic equation obtained by substituting the equation of the line into the equation of the parabola should be zero. Substituting each option into y² = 8x and checking the discriminant, we find that y = 2x - 1 is tangent.18. The line y = kx + 3 intersects the hyperbola x² - y² = 1. If there is exactly one point of intersection, what is the value of k?Answer: Substituting y = kx + 3 into the equation of the hyperbola, we get x² - (kx + 3)² = 1. Simplifying and setting the discriminant equal to zero since there is exactly one point of intersection, we can solve for k.19. Determine if the line 2x - y + 5 = 0 intersects the ellipse 2x² + 3y² = 12.Answer: Substituting y = 2x + 5 into the equation of the ellipse and simplifying. Then checking if the resulting equation has solutions determines if they intersect.20. A line passes through the point (1,2) and intersects the parabola y² = 4x. What is the equation of the line if the point of intersection is the vertex of the parabola?Answer: The vertex of the parabola y² = 4x is (0,0). The equation of the line passing through (1,2) and (0,0) can be found using the two-pointform of a line.21. In a rectangular coordinate system, the equation of an ellipse is x²/16 + y²/9 = 1. A point P on the ellipse is 2 units away from one focus. The distance from point P to the other focus is ( ).Solution: For an ellipse, the sum of the distances from any point on the ellipse to the two foci is constant and equal to the length of the major axis. Here, a² = 16, so a = 4. The sum of the distances from a point on the ellipse to the two foci is 2a = 8. Since the point is 2 units away from one focus, the distance to the other focus is 8 - 2 = 6. The answer is 6.22. The hyperbola x²/9 - y²/16 = 1 has focal length ( ).Solution: For a hyperbola x²/a² - y²/b² = 1, the focal length c is given by c² = a² + b². Here, a² = 9 and b² = 16, so c² = 9 + 16 = 25. Thus, c = 5. The focal length is 2c = 10. The answer is 10.23. The parabola y² = 8x has focus coordinates ( ).Solution: For the parabola y² = 2px, the focus coordinates are (p/2, 0). Here, 2p = 8, so p = 4. Thus, the focus coordinates are (2, 0). The answer is (2, 0).24. If a point moves so that the sum of its distances from two fixed points is constant, then the locus of the point is ( ).Solution: If a point moves so that the sum of its distances from two fixed points is constant, then the locus of the point is an ellipse. The answer is an ellipse.25. The asymptotes of the hyperbola x²/4 - y²/9 = 1 are ( ).Solution: For a hyperbola x²/a² - y²/b² = 1, the asymptotes are y = ±(b/a)x. Here, a² = 4 and b² = 9, so a = 2 and b = 3. The asymptotes are y = ±(3/2)x. The answer is y = ±(3/2)x.26. Which of the following is true about the asymptotes of a hyperbola?Answer: The asymptotes of a hyperbola are two lines that the hyperbola approaches as x and y approach infinity or negative infinity. The equation of the asymptotes for a hyperbola of the form (x^2/a^2) - (y^2/b^2) = 1 is y = ±(b/a)x.27. If the equation of an ellipse is (x^2/25) + (y^2/16) = 1, what is the length of the major axis?Answer: The major axis of an ellipse is along the x-axis when the larger denominator is under x^2. In this case, a^2 = 25, so a = 5. The length of the major axis is 2a = 10.28. What is the eccentricity of a parabola?Answer: The eccentricity of a parabola is always 1.29. For a hyperbola, as the eccentricity increases, what happens to the shape?Answer: As the eccentricity of a hyperbola increases, the hyperbola becomes more elongated or "thinner".30. If the focus of a parabola is (3,0) and the directrix is x = -3, what is the equation of the parabola?Answer: Since the focus is (3,0) and the directrix is x = -3, the parabola opens to the right. The equation of a parabola opening to the right with focus (p,0) and directrix x = -p is y^2 = 4px. Here, p = 3, so the equation is y^2 = 12x.。
reshape的用法
Reshape的用法在数据处理和机器学习领域中,数据的形状(shape)是一项非常重要的概念。
数据的形状描述了数据的维度和大小,而数据的形状变换(reshape)则是指改变数据的维度和大小。
在本文中,我们将重点介绍reshape的用法和相关概念。
1.什么是Reshape?Reshape是一种数据重塑的操作,通过改变数据的形状,我们可以更方便地对数据进行分析和处理。
在Python的数据分析库NumPy和机器学习库Scikit-learn中,都提供了reshape的功能。
2.为什么需要Reshape?在实际数据处理和机器学习任务中,经常需要将数据从一个形状转换为另一个形状。
例如,在图像识别任务中,图像通常表示为三维数组,即(宽度,高度,通道数)。
而在进行特征提取时,我们通常需要将图像转换为一维数组,即将三维形状转换为一维形状。
另外,有时数据的形状不符合模型的输入要求,此时也需要进行reshape。
3.NumPy中的Reshape在NumPy中,reshape函数可以用来改变数组的形状。
其函数原型如下:numpy.reshape(a, newshape, order='C')•a:要进行重塑的数组•newshape:新的形状,可以是一个整数或者一个整数数组•order:可选参数,表示在重塑过程中如何排列元素下面是一些使用reshape函数的示例:3.1 将一维数组转换为二维数组import numpy as npa = np.array([1, 2, 3, 4, 5, 6])b = np.reshape(a, (2, 3))print(b)# [[1 2 3]# [4 5 6]]在这个例子中,我们将一个一维数组[1, 2, 3, 4, 5, 6]转换为一个二维数组,新的形状为(2, 3)。
结果是一个二维数组,其中第一行为[1, 2, 3],第二行为[4, 5, 6]。
3.2 将多维数组转换为一维数组import numpy as npc = np.array([[1, 2, 3], [4, 5, 6]])d = np.reshape(c, 6)print(d)# [1 2 3 4 5 6]在这个例子中,我们将一个二维数组[[1, 2, 3], [4, 5, 6]]转换为一个一维数组。
Focal Shape 40 产品说明书
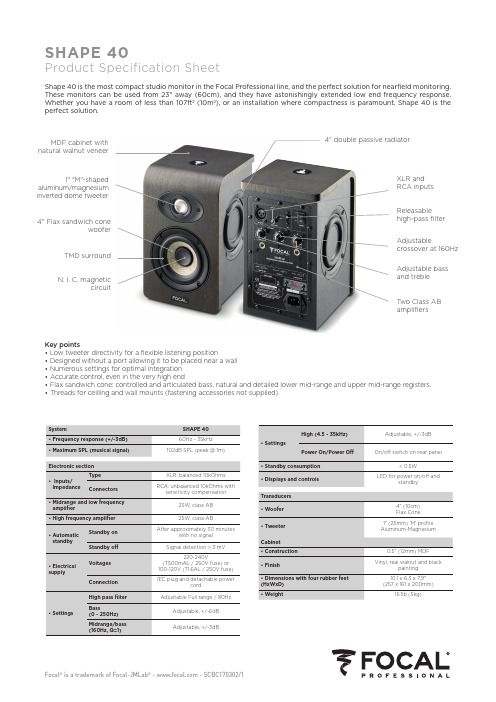
SHAPE 40 60Hz - 35kHz 102dB SPL (peak @ 1m)
XLR: balanced 10kOhms RCA: unbalanced 10kOhms with
sensitivity compensation
25W, class AB
25W, class AB After approximately 30 minutes
Cabinet • Construction • Finish • Dimensions with four rubber feet (HxWxD) • Weight
Adjustable, +/-3dB
On/off switch on rear panel
< 0.5W LED for power on/off and
r
4" double passive radiator
1" “M”-shaped aluminum/magnesium inverted dome tweeter
4" Flax sandwich cone woofer
TMD surround
N. I. C. magnetic circuit
XLR and RCA inputs
Releasable high-pass filter
Adjustable crossover at 160Hz
Adjustable bass and treble
Two Class AB amplifiers
Key points • Low tweeter directivity for a flexible listening position • Designed without a port allowing it to be placed near a wall • Numerous settings for optimal integration • Accurate control, even in the very high end • Flax sandwich cone: controlled and articulated bass, natural and detailed lower mid-range and upper mid-range registers. • Threads for ceilling and wall mounts (fastening accessories not supplied)
不同形状的英文短语
不同形状的英文短语月亮和星星用人眼从远处看的话,是不同形状的。
下面就由店铺为大家带来关于不同形状的英语短语集锦,希望大家能有所收获。
关于不同形状的相关短语不同形状different shapes不同形状的设计 different shape foldable intraocu-lar lens不同形状的地块 the block of different shapes以不同的形状 in different shapes认识不同的形状Learn and identify the different types of shapes不同的形状 various shapes关于不同形状的相关例句(厂商)在假肢中嵌入了较轻的关节,可以手动弯曲成不同形状。
Light joints can be built in so they can be manually bent into different shapes.不同形状的支架可以产生血管或者其他类型的组织。
Different shaped scaffolding can produce blood vessels or other forms of tissue.“看起来,它们可以辨认出不同形状的鱼鳍,这意味着他们能辨别出不同的鱼类。
”他这么告诉BBC新闻频道。
"They seem to be able to discriminiate between different shapes, which might even mean theydiscriminate between different species of fish," he told BBC News.他补充道:“我们每年也在长高,男人们不仅体型越变越大,而且他们变成不同形状,为他们找适合穿的衣服越来越难。
”He added: "We are also getting taller ever year, and guys are not only getting bigger but theyare also coming in different shapes which makes it harder for them to find clothes that fit.他们切,削,拉,甚至用筷子来制作不同形状的面条。
《计算机视觉》PPT课件

实例:雷达测距系统
computer vision
3
7.1 立体视觉基础
被动测距方法
双目视觉系统:使用两个相隔一定距离的 摄像机同时获取场景图像来生成深度图。
单目运动视觉:一个摄像机在不同空间位 置上获取两幅或两幅以上图像,通过多幅 图像的灰度信息和成像几何来生成深度图
特征深度测量:使用灰度图象的明暗特征、 纹理特征、运动特征间接的估算深度信息。
14
7.2 立体成像
依据双目立体视觉几何关系的深度计算
结合以下公式:
x
x
l
zF
x B x r zF
可以得到: z B F x l x r
其中F是焦距,B是基线距离, xl 是xr 视差。
各种场景中的点的深度就可以通过计算视差来实 现。视差一般是整数。
对于一组给定的摄像机参数,提高场景点深度计
即使两个摄像机处于一般的位置和方向时, 对应场景点的两个图像点仍然位于图像平 面和外极平面的交线(外极线)上。
computer vision
20
7.3 立体成像
从原理上讲根据“立体图象对”抽取深度信息的 处理应包括以下四部分:
在图象中寻找在两幅图象中都便于区分的特征或 用于匹配的基元(primitive)。
立体匹配的匹配规则约束
立体匹配:立体成像的深度信息测量的一个重要 步骤就是寻找立体成像对中的共轭对,即求解对 应问题。
问题:实际中求解对应问题是非常困难的,一是 计算量大,二是匹配的准确度要求高。
解决:为了求解对应,建立了许多约束来减少对 应点误匹配,并最终得到正确的匹配特征点的对 应。
computer vision
computer vision
4
三D重建

一、3D重建的定义:从二维图像恢复三维物体可见表面的几何结构称三维重建,是人类视觉的主要目的之一。
计算机三维重建技术是计算机辅助设计与计算机图形学中一个重要的研究领域。
三维重建是通过物体的两个以上二维投影图的输入后,计算机进行了自动检索 ,获取物体的二维几何信息和拓扑信息 ,并建立起三维立体模型,恢复出摄像机运动参数和空间物体的3D几何形状。
在计算机视觉领域,三维重建主要由三个步骤构成;(1).图像对应点的匹配,即从不同图像中找出同一空间点在这些图像上投影点的过程;(2).对摄像机进行标定,即确定摄像机固有的与光、电特征及几何结构有关的内参数;(3).在此基础上,进一步确定不同图像间摄像机的运动参数,即求解外参数;三维重建的三个关键步骤:摄像机标定、图像对应点的确定和两图像间摄像机运动参数的确定。
二、3D重建的意义:三维重建技术是人工智能研究课题,该问题的研究成果可以直接应用于机器导航、精密工业测量、物体识别、医学仪器、虚拟现实以及军事等方面。
物体三维重建是计算机辅助几何设计(CAGD)、计算机图形学(CG)、计算机动画、计算机视觉、医学图像处理、科学计算和虚拟现实、数字媒体创作等领域的共性科学问题和核心技术。
三、3D重建发展及现状国外在三维重建方面研究最多的国家属日本 ,其次是美国和英国。
发达国家起步较早 ,研究的也比较深入:1995 年日本东京大学的 Hoshino ,Hiroshi 领导的小组于 95 年用物体反射的M - ar2ray coded光源影像对物体表面进行三维重建取得进展。
用这种方法 ,可用简单的设备完成三维重建。
1993 年美国芝加哥大学 G oshtasby ,Ardeshir。
进行了“应用合理的高斯曲线和平面 ,进行二维、三维图形的恢复和设计的研究”。
目的是使用合理的高斯曲线和平面 ,来表示复杂图形并证明用这种方式 ,不需用传统的网格方式而是利用分散设置的控制点来恢复外形的新方法。
机器视觉原理及应用 课后习题答案
机器视觉原理及应用第一章课后习题答案1.总结机器视觉发展历史。
机器视觉发展经历了从20世纪70年代的数字图像处理、马尔视觉理论框架、积木世界,20世纪80年代的图像金字塔和尺度空间、“由X到形状”、Snake模型、视觉相关变分优化算法,20世纪90年代的“图割”(graph cut)稠密立体视觉、统计学习方法以及最新的计算摄像学、计算成像、2D/3D图像及视频理解、深度学习等过程。
2.给出机器视觉应用的五个具体例子。
无人驾驶、机器人抓取、工业检测、虚拟现实、人机交互等。
3.机器视觉的目标是什么?机器视觉是机器(通常指数字计算机)对图像进行自动处理并报告“图像是什么”的过程,总的来说是使得机器代替人进行视觉感知。
4.机器视觉的主要内容有哪些?相机标定与图像形成等底层机器视觉问题、Shape From X三维视觉、立体视觉、光流与运动分析、目标匹配,检测与识别、3D传感,形状描述、目标跟踪、视觉人机交互与虚拟现实与增强现实、计算成像、图像、视频理解。
5.叙述马尔理论的主要内容。
Marr的理论指出视觉是一个复杂的信息加工过程。
为了理解视觉中的复杂过程,首先要解决两个问题:第一,视觉信息的表达问题;第二,视觉信息的加工问题。
马尔从信息处理系统的角度出发,认为对视觉系统的研究应分为三个层次,即计算理论层次、表达与算法层次和硬件实现层次。
马尔从视觉计算理论出发,将系统分为自下而上的三个阶段,即视觉信息从最初的原始数据(二维图像数据)到最终对三维环境的表达经历了三个阶段的处理。
6.机器视觉与模式识别的区别是什么?二者存在多方面的区别:机器视觉通过机器代替人进行视觉感知,机器视觉的核心问题是从一张或多张图像生成一个符号描述,因此需要考虑前端的成像,而模式识别的主要任务是对模式进行分类,模式识别只需要考虑输入的图像。
模式识别的内容主要包分类、识别等,而机器视觉的内容包括相机标定、三维重建等。
此外,机器视觉由两部分组成:特征度量与基于这些特征的模式识别。
点关于y=kx的对称点
点关于y=kx的对称点英文回答:When considering the points that are symmetric to the line y=kx, it is important to understand the concept of symmetry in mathematics. Symmetry refers to a balance or correspondence in size, shape, and position of objects or figures. In the case of a line, a point is said to be symmetric to the line y=kx if it is equidistant from theline on both sides.To find the symmetric point to the line y=kx, we canuse the formula for the distance between a point and a line. Let's say we have a point (x1, y1) that is symmetric to the line y=kx. The distance between the point and the line is given by the formula:d = |y1 kx1| / sqrt(1 + k^2)。
To find the symmetric point, we need to find the point(x2, y2) that is equidistant from the line y=kx. This means that the distance between (x2, y2) and the line is equal to the distance between (x1, y1) and the line.Using the formula for the distance, we can set up the following equation:|y1 kx1| / sqrt(1 + k^2) = |y2 kx2| / sqrt(1 + k^2)。
proe英语单词
Pro/E英语单词Navigation Area——浏览区Model tree——模型树Layer——图层File——文件View——视图Insert——插入Analysis——分析Info——信息Tools——工具Applications——应用程序Window——窗口Help——帮助Dashboard——仪表板Feature——特征Extrude——拉伸Revolve——旋转Sweep——扫描Blend——混合Hole——孔Shell——壳Rib——肋Draft——拔模Round——倒圆角Chamfer——倒角Constraint——几何限制条件Sketch plane——草绘平面Sketch orientation reference——草绘方向的参照Orientation——方向Depth——深度Standard Orientation——标准方向Default Orientation——默认方向Placement——放置Section——截面Options——选项Capped ends——封闭端Properties——属性Material direction——材料方向Internal——内部Variable Section Sweep——可变剖面扫描Protrusion——伸出项Thin Protrusion——薄伸出项Cut——切口Thin Cut——薄板切口Surface——曲面Sketch Traj——草绘轨迹Select Traj——选取轨迹Merge Ends——合并终点Free Ends——自由终点Add Inner Faces——增加内部面No Inner Faces——无内部面Sweep Traj——扫描轨迹Setup New——新设置Filp——反向Okay——确定Top——顶部Bottom——底部Right——右Left——左Default——预设Quit——退出SKET VIEW——草绘视图Attributes——属性Done——完成Defined——已定义Use Previous——使用先前的Material Side——材料移除侧Inside section——截面内侧Cancel——取消Preview——预览Constant Section——恒定截面Cap ends——合并端Origin——原点Skect placement point——草绘放置点Tangency——相切Parallel——平行Regular Sec——规则截面Skectch Sec——草绘截面Straight——直的Smooth——光滑Toggle Section——切换曲面Feature Tools——特征工具General——一般Rotational——旋转的Project Sec——投影截面Blind——盲孔Boundary Blend——边界混合Edit——编辑Solidify——实体化Linear——线性Radial——径向Diameter——直径Coaxial——同轴Edge——边Offset——偏移Primary——主参照Shape——形状Radius——半径Angle——角度ISO——公制螺纹UNC——英制粗螺纹UNF——英制细螺纹Note——注释Thru Thread——全螺纹Thread——螺纹Exit Countersink——退出埋头孔References——参照Non-default thickness——非预设厚度Remove——移除Click here to add item——单击此处添加项目Draft surfaces——拔模曲面Draft hinges——拔模枢轴Pull direction——拔模方向Sets——设置Transitions——过渡Circular——圆形Rolling ball——滚球Through curve——通过曲线Pieces——段Details——细节Vertex——顶点Value——值Location——位置Attactment——附件Create end surfaces——创建结束曲面Spine——骨架Distance——距离Corner——角落点Corner Chamfer——拐角倒角Enter-input——输入Change——更改Apply——应用Type Keyword——键入关键字Find Now——立即查找Prehighlight——预选加亮Through All——穿透Erase——拭除Current——当前Copy——复制Paste Special——特殊粘贴Simple——简单Apply Move/Rotate transformations to copies——对副本应用移动/旋转变换Close——关闭Advanced reference configuration——高级参照配置Family Table——族表Look In——查找范围Switch Dimensions——切换尺寸Parameter——参数Merge Part——合并零件Filter——过滤Type——类型Instance Name——实例名Curve chain——曲线链Datum Plane——基准平面Display——显示Loop——环Accept——接受Save——保存Undo——撤销Original——原始Make Datum——产生基准Loop surfaces——回圈曲面Approximate——逼近Thru Points——经过点CRV OPTIONS——曲线选项Use Xsec——使用剖截面From Equation——从方程Quilt/Surf——面组/曲面Tweak——扭面Optional——可选的Cartesian——笛卡尔坐标Cylindrical——柱坐标Spherical——球坐标Csys——坐标系Chain——链Exact——确切Mirror——镜像Hide original geometry——隐藏原始几何Trim——修剪trimming object——修剪对象Intersect——相交Unlink——断开链接Along direction——沿方向Normal to surface——垂直于曲面Wrap——包络Destination——目的地Center——中心Ignore intersection surface——忽略相交曲面Trim at boundary——在边界Measurements——量度To Vertex——至顶点Boundary——边界Measurement type——测量类型Open ends——开放终点Copy all surface as is——按原样复制所有曲面Swap—交换Exclude sueface and Fill holes——排除曲面并填充孔Copy as dependent——复制为从属性Join—连接Keep trimming sueface——保留修剪曲面Thin trim——薄修剪Controls——控制Extend——延伸Method——方式Tangent——切线Along Edge=Along Side edge——沿着侧边NormBnd=Normal To Boundary edge—垂直延伸边Automatic Fit——自动拟合Controlled Fit——控制拟合Create side surface——创建侧曲面Expand——延展Replace——替换Should the entities be aligned——点线是否对齐Environment——环境Isometric——等轴侧Constraints——约束Natural——自然Contents——内容Status——状态Pause——暂停Dimension——尺寸Scan Curve——扫描曲线Gtol——几何公差Symbol——符号Surace Finish——表面光洁度Datum Tag——基准标签Annotation——注释Annotation Element——注释元素Save Status——保存状态Reset Status——重置状态Unhide——取消隐藏Smart——智能Save a Copy——保存副本Thicken——加厚Edit Definition——编辑定义Relations——关系式Model Player——模型播放器Fix Model——修复模型Regenerate features—再生特征Show Dims——显示尺寸Display each feature——显示每个特征Model Tree Columns——模型树列Tree Filters——树过滤器Feat Subtype——特征子类型Designate Name——指定名称Width——宽度Ordel——顺序ppress——隐含Highlighted features——加亮特征Confirm——确认Parent/Chlid——父项/子项Child Handing——子项处理Global Reference Viewer——全局参照查看器Part—零件Actions——操作Object——对象Suspend——保留Setup Note——设置注释Pattern——阵列Conflict——冲突Explain——解释Resolve Sketch——解决草绘Failure Diagnostics——诊断失败Axis——轴Edit Definition——编辑参照The system could not construct the intersetion of part and feature.——系统不能构建零件和特征的交截Feature aborted——特征中止Failed to intersect part——交截零件失败Edit Parameters——编辑参数Increment——增量Table——表Placement——放置Toggle Construction——编辑构造Ungroup——分解组Diamona——菱形Square——正方形Triangle——三角形Spiral——螺旋Assembly——组件Drawing——绘图Manufacturing——制造Format——格式Report——报表Diagram——图表Layout——布局Markup——标记Sub-type——子类型Interchange——互换Verify——校验Process Plan——处理计划Common Name——公告名称Use default template——使用预设模板Component Placement——元件放置Connect——连接Mate——匹配Align——对齐Coincident——重合Allow Assumptions——允许假设Set Working Directory——设置工作目录View Manager——视图管理器Explode——分解Style——样式Simp Rep——简化表示No Cross Section——无剖面Plannar——平面Single——单一Top Level——顶级Show X-Hatching——显示剖切线Bill of Materials——材料清单Quantity——数量Contains——包含Specify Template——指定模板Empty——空Browse——浏览Size——大小Portrait——纵向Landscape——横向Inches——英寸Millimeters——毫米Origin——原点Scale——比例Trimetic——斜轴侧Pick From List——从列表拾取Lock View Movement——锁定视图移动Auxiliary——辅助Coordinate Dimension——坐标尺寸Sheet——页面Arrows——箭头Jog——角拐Shared Date——共享数据Import——导入Height——高度Categories——类别View visibility——视图可见性Partial View——局部视图Clip——修剪Custom scale——定制比例Wireframe——线框Spacing——间距Modify Line Style——修改线体Phantom——剖视图Sheet Metal——钣金件Store Map——储存映射Line Font——线型Petrieve——检索Show By——显示方式Pick to ordinate——拾取基线Symmetry Line Axis——轴对称线Spline——样条Switch to orinate——切换到纵坐标Decimal Place——小数位数With Leader——带引线Text Style Gallery——文本样式库Character——字符Slant angle——斜角Justification——对齐Horizontal——水平Crosshatching——剖切线Margin——边距Nominal value——公称值Upper tolerance——上公差Lower tolerance——下公差Basic——基础Ipspection——检查Witnessline——尺寸界线Dual dimension——双重尺寸Changes to either the current feature's geometry or to some other feature have caused the references for user-defined transition (No. 1) to be lost. 变换到是目前的几何特征或者其他某种特征引起了用户自定义变换的参照(坐标系)的丢失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Shape from X
从X恢复形状:x可以是,shading(单幅图像明暗)、stereo vision(立体视觉法)、photometric stereo(光度立体法)、texture(纹理)、motion(运动)、contour(轮廓)、shadow(阴影)。
从明暗恢复形状( shape f rom shading , 简称SFS):
是计算机视觉中三维形状恢复问题的关键技术之一,其任务是利用单幅图象中物体表面的明暗变化来恢复其表面各点的相对高度或表面法方向等参数值,为进一步对物体进行三维重构奠定基础。
由单幅图像灰度明暗变化恢复三维形状的过程可以看作成像过程的逆过程。
对实际图像而言,其表面点图像亮度受到了许多因素,如光源、物体表面材料性质和形状,以及摄像机(或观察者)位置和参数等的影响。
由单幅图像灰度明暗变化恢复三维形状是在一定的约束条件下从平滑变化的灰度图像恢复出表面法向信息,即根据物体表面反射模型建立物体表面三维形状与采集的图像灰度之间关系的反射图方程,以及由先验知识所建立的对物体表面形状参数的约束条件,对这些关系求解可得到物体表面三维形状。
传统SFS方法均进行了如下假设:( 1)光源为无限远处点光源;( 2)反射模型为朗伯体表面反射模型( Lambertian);( 3)成象几何关系为正交投影。
立体视觉法(shape from Stereo vision)
可以分为双目和多目立体视觉两种类型。
简要说明双目立体视觉的原理。
与人类双目视觉的感知过程类似,双目立体视觉从两个不同视点观察同一物体可以得到不同视角下的图像,通过分析不同图像中同一像点的不同视差来获取物体表面的三维空间信息。
立体视觉系统可以分为图像采集、摄像机标定、特征提取、立体匹配、深度恢复及三维表面插值等部分组成。
目前有MTI人工智能实验室、Yale 机器视觉机器人实验室、哈尔滨工业大学、中科院自动化所、西安交通大学、Sony 公司、Intel公司等国内外多家研究机构都在从事立体视觉方面的研究。
立体视觉法测量方法简单,但该方法的主要缺点是摄像机需要标定,图像特征匹算法复杂。
光度立体法(shape from photometric Stereo)
避免了对应点匹配问题,使用单目多幅图像中蕴涵的三维信息恢复被测对象三维形状。
一幅图像像素点的灰度主要由如下因素决定:物体的形状、物体相对于光源和摄像机的位置、光源和摄像机的相对位置,以及物体的物理表面反射特性等。
光度立体法固定摄像机和物体的位置,通过控制光源方向,在一系列不同光照条件下采集图像,然后由这几幅图像的反射图方程求解物体表面法向量,进而重构物体三维形状。
Ikeuchi等使用光度立体法开发出一套机器人视觉系统,Lee提出一种将光度立体法和SFS方法相结合的三维重构方法。
光度立体方法不需要求解反射图方程,方法实现简便。
但需要改变光源位置,采集多幅图像,无法使用于自然光或固定光源的物体表面三维重构。
由纹理恢复形状方法(ShaPe from texture)
利用物体表面的纹理信息确定表面方向进而恢复出表面三维形状。
纹理由纹理元组成,纹理元可以看作是图像区域中具有重复性和不变性的视觉基元,纹理元在
不同的位置和方向反复出现。
由纹理元的变化可以对物体表面法向量方向进行恢复。
常用的纹理恢复形状方法有三类:利用纹理元尺寸变化、利用纹理元形状变化以及利用纹理元之间关系变化对物体表面梯度进行恢复。
Gibson在1950年首先提出了由纹理或纹理梯度表面深度的变化,Kender提出了一种恢复由规则的
平行线组成的栅格表面取向的方法。
这种方法对物体表面的纹理信息要求严格,
需要掌握成像投影中纹理元的畸变信息,只有在纹理特性确定的条件下才能应用。
该方法精度较低,而且适用性差,实际应用较少。
由运动恢复形状方法(Shape from motion)
当目标与摄像机在发生相对运动时,摄像机拍摄对应的图像序列,可通过分析该
图象序列获得场景的三维信息。
摄像机与场景目标间有相对运动时所观察到的亮度模式变化显示出的运动称为光流(optical flow)。
光流表示图像的变化,它包含
了目标的运动信息,由此可以确定观测者与目标的相对运动,并且可以根据光流求解表面法向量。
从运动恢复形状方法适用于被测对象处于运动状态,利用目标
与摄像机相对运动来获得场景中目标之间的位置关系,需要多幅图像,不使用静态的场景。
同时序列图象像素间的匹配对测量计算精确度影响较大。
由轮廓恢复形状方法(Shape from Contour)
图像的轮廓是物体表面的边缘在图像平面的投影。
Barrow与Tennnenboum将轮廓线分为两类,一是不连续轮廓线,它对应物体表面的中断或转折处,形成原因是物体表面法向量在这里发生不连续变化,另一种是Occluding轮廓线,它对应物体表面的法向量光滑地与摄像机垂直,形成原因是物体表面到摄像机的距离在这里发生不连续变化。
不连续轮廓线应用于多面体结构的重构和定位,occluding 轮廓线用于恢复物体表面的局部特征或全局特征。
Karl研究了正交投影下用Occluding轮廓线全局地恢复非退化二次曲面形状。
由阴影恢复形状方法(Shape from shadow)
图像的阴影边界蕴涵了图像的轮廓信息,因此可以根据不同的光照条件下图像的阴影恢复物体表面的三维形状。
Michael提出了一种由阴影恢复形状的优化算法。
目前国内外对这种方法的研究比较少。
其他的非接触三维测量方法有如CT方法,飞行时间法等。