管道机器人分解
地下管道清淤机器人 水下履带清淤机器人

3.地下管道清淤机器人(水下履带清淤机器人)、水下清淤机器人机体本身为不锈钢材质,不易产
生火花,电器部分采用接零保护,可靠稳定。 4.地下管道清淤机器人(水下履带清淤机器人)、水下清淤机器人机器人可24小时连续作业,大大 缩短工期,提高了效率。有了水下清淤机器人这个得力帮手,市政地下管道工程人工成本及风险将
地下管道清淤机器人
履带清淤机器人
地下管道清淤机器人
地下管道清淤机器人(水下履带清淤机器人) 市政管道清淤机器人(履带清淤机器人) 雨污水管道清淤机器人(履带清淤机器人) 供排水管道清淤机器人(履带清淤机器人)
地下管道清淤机器人
城市地下排水管道一旦堵塞,需要进行清淤疏通作业。近年来,各地在疏通地下排水 管道的作业中,发生过多起作业人员中毒伤亡的事故,给人民的生命财产造成了很大的
谢谢大家!
大大降低!
地下管道清淤机器人
LOREM IPSUM DOLOR LOREM IPSUM DOLOR
地下管道清淤机器人Fra bibliotek地下管道清淤机器人(水下履带清淤机器人)显示器:显示器采用19寸LED高亮液 晶显示器,亮度不低于800, 屏显时间/日期,电脑主机 电脑采用I5主机,硬盘容量
1T,128GB SSD固态硬盘,路径生成,具有座标记录功能,记录取样GPS坐标,并
损失。我国域市地下排水管道的清淤工作还普遍处于人工作业的落后状态,不仅体力繁
重,效率低,恶劣环境雨污水管道已经运行多年,多处地段严重淤积和破损。“地下管道 在路面下,看不着摸不到,其清淤和修补成了一大难题。”“地下管道经常堵塞渗漏,无
法查明原因,更无计可施?”地下管网工程技术人员普遍担忧的老大难问题。被地下管道
清淤机器人(水下履带清淤机器人)轻松搞定。
履带式管道机器人方案

牵引力较大,对管壁压强较小。
以适应最小500的管径,管径大于500时,两侧负重轮下压,改
变履带形状使其与管壁贴合,增大履带与管壁接触面积。
动力
由于管道内壁沉积粉尘可能
为铁粉尘、铝镁粉尘或面粉;
考虑防爆,采用气动或者软
轴驱动。本处设计采用阿特
拉斯·科普柯公司的一款气动
马达作为驱动装置,若采用
软轴,则修改其中减速器及
部分连接件结构即可。
履带式管道自动清灰机器人设计方案
适用环境要求
适用管道形状:圆形;
适用管道直径、长度:管道直径500~800mm;管道长度不超过50m;
适用管道的布置:水平直管道和小于5度的倾斜直管道;
管道连接部分内壁错位高度不超过10mm;
管道内壁沉积粉尘可能为铁粉尘、铝镁粉尘或面粉;
适用于有水平或竖直分支口的管道,分支口直径为主管直径的3分之2。
行走方式
序号
方式
1
轮式
2
螺旋式
3
履带式
4
蛇形式
5
多足式
6
蠕动式
工作原理
优点
缺点
结构简单,控制灵活,
复杂管道通过性能差,越
平坦路面性能优越
障能力不足
驱动效率高,牵引力大, 运动速率较慢,清扫机构
运动平稳,
设计复杂
牵引附着性能好,越障
摩擦力大,对于平坦路面
能力较强
能量利用率低
越障能力好,弯道通过
姿态和运动控制复杂,负
三轮腿结构相同,亦可以保证三条轮腿在管道截面不是标准圆形的情况下总能与管
壁保持良好接触。安装时绞牙减振器可以调节弹簧高度,使履带张紧。
211086683_浅析排水管道清淤作业机器人结构方案创新设计
2 管道清淤机器人的设计难点 2.1 动力统设计困难
在动力系统的设计中,设计人员要考虑清淤管道机 器人移动与清淤的动力分配平衡。首先,清淤作业所需 要的刀盘会消耗大量动力,所以动力系统的设计就不得 不针对其进行特殊优化。另外,部分科研人员提出将清 淤管道机器人的功能独立化的建议,但排水管道横截面 积有限,同一时间内,能够进行的作业类型会受到较多 限制,所以功能独立化会大大降低管道清淤作业的效率。 2.2 淤泥类型多样
Research and Exploration 研究与探索·工艺流程与应用
浅析排水管道清淤作业机器人结构方案创新设计
李正雄,邹红涛 (中国安能集团第三工程局有限公司重庆分公司,重庆 401320)
摘要:城市下水道清淤作业任务繁重,处理不当还会影响城市的基本功能运转。但受限于技术影响,现阶段,大多数城市都很难直 接对下水管道结构进行优化,所以就需要耗费大量人工资源在下水道清洁任务中。但城市下水道结构复杂,人工作业作用十分有限,所以 部分地区也开始使用清淤机器人来替代人工作业。但是,从结果上来看,清淤机器人的效果并不能达到预期。因此,本文对管道清淤作业 机器人结构进行了分析,并根据城市的基础排淤需求优化了机器人的结构设计路线。
我国各城市经济构成不同,其人员组成也会有较大 差异,而这也会直接影响地下管道的淤泥堆积情况。比 如,以大型金融、文化城市为例,该地区工业聚集度较低, 所以地下淤泥类型多为生活垃圾残渣,所以虽然淤泥堆 积频繁,但简单的刀口切割与水流冲击都可以起到较好 的清淤效果。而在工业城市中,虽然大型工业垃圾有专 有的处理通道,但依然会影响该地区的排水管道清洁系 统,所以就需要针对性地进行淤泥清除方案调整。本文 更倾向于通过多种清淤方案结合的方式来达到清理效果, 而并非单单依靠某一种清淤清理体系。 3.2 动力供给问题处理
管道清淤机器人功能简介课件

02 管道清淤机器人功能
管道检测
检测管道内部状况
管道清淤机器人搭载高清摄像头和传感器,能够实时传输管道内部的图像和数 据,检测管道的破损、堵塞、沉积物等情况。
识别障碍物
机器人通过智能识别技术,能够检测并标识管道内部的障碍物,如砖块、石块 、塑料等,为后续清淤工作提供参考。
自动清淤
பைடு நூலகம்高效清淤
机器人具备强大的清淤能力,通过高压水枪或机械臂等设备,能够快速清理管道 内的沉积物和堵塞物,恢复管道通畅。
管道清淤机器人功能 简介
目录
CONTENTS
• 机器人概述 • 管道清淤机器人功能 • 管道清淤机器人优势 • 管道清淤机器人案例展示 • 未来展望
01 机器人概述
定义与特点
定义
管道清淤机器人是一种专门用于 清理管道内淤泥、杂物和堵塞物 的自动化设备。
特点
具备高效、安全、环保等优点, 可替代传统的人工清淤方式,提 高作业效率和安全性。
材料科学应用
利用新型材料和复合材料,提高机器人的耐磨、耐腐蚀性能。
应用领域拓展
市政排水系统
将管道清淤机器人应用于城市排水管道,提高排水系统的维护效 率。
工业管道清淤
将机器人应用于石油、化工等行业的管道清淤作业,降低人工清淤 的风险。
农业灌溉系统
拓展管道清淤机器人在农业灌溉管道的应用,提高灌溉系统的维护 水平。
和生态环境。
特点
02
具备大范围覆盖、高效清淤、环保无污染等优势,同时可进行
水下监测和数据收集。
应用效果
03
提升水质,改善生态环境,促进水资源的可持续利用。
05 未来展望
技术创新与升级
新型驱动技术
供热管道机器人技术实现项目设计方案

供热管道机器人技术实现项目设计方案1简介在我国北方供热管道大量存在,16个地区的调查资料显示,运行时间在15年以上的供热管道占26%。
由于建设时间较早,这部分管道大部分采用管沟和架空敷设方式,技术落后,再加上运行时间长,维护管理不善,问题尤其突出。
管沟敷设供热管道长度占34.3%。
管沟防水质量差,地下水和地表水渗漏使得管道泡水,热损失严重,也是较大问题之一。
为了解决管道运行时出现裂缝而导致无法向居民提供供热问题,需要对管道进行检测,测评,得到管道的运行状态。
供热管道都是金属制成,金属可能腐蚀,特别是在链接的部位,而这些裂缝是用视觉很难发现的。
我们要得到金属内部状态,我们必须采用X射线探伤。
由于X射线对人员身体伤害比较大,并且鉴于某些管道较小,人员在里面很难活动,我们针对这些问题设计出了我们用于管道裂缝检测的机器人。
我们小组讨论最后得出了一套机器人设计的解决方案,并在郑旭学长帮助把机器人本体搭建好了,通过测试,基本能达到预期的效果。
2系统设计方案站在设计者角度,管道检测机器人可以分为机械本体和控制系统两大部分,本文主要研究管道机器人的控制系统设计。
本节首先对目标机器人的机械结构作简单介绍,然后详细讨论控制系统的三层结构模型,并根据模块功能的相关性,对目标控制系统进行模块划分。
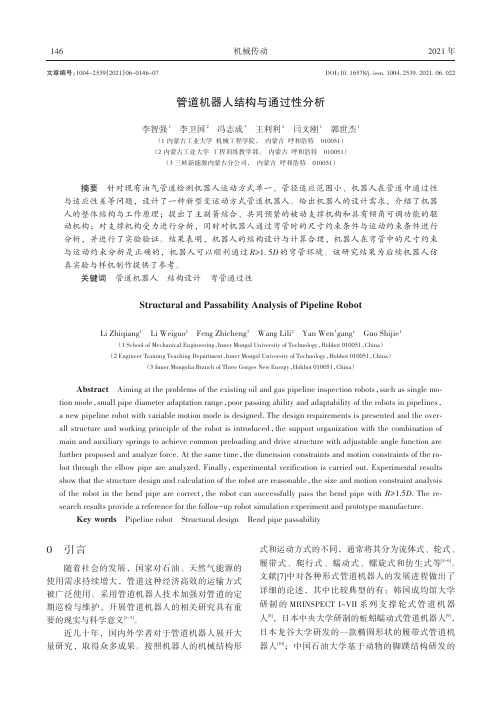
2.1目标机械系统简介本文针对一种轮式管道机器人进行控制系统设计,图2.1是它的机械结构原理图。
从图中可以看出这种管道机器人主要由放射源定位器、横杆、摆杆、底座和车轮等部分组成,其中车轮和底座构成了管道机器人的移动载体,而放射源定位器、横杆和摆杆等部件构成了针对焊缝探伤作业的车载平台,机器人各组成部分的功能如下:(1)横杆。
目标机器人使用横杆安装放射源专用设备、全景摄像头和超声波传感器等负载,在车体端正的情况下,安装在横杆上的各个设备沿管道径向的位置保持一致。
横杆通过一种滑动机构连接在摆杆上,它可以带动放射源专用设备沿摆杆轴向进行移动,移动过程中放射源专用设备与放射源定位器的相对位置保持恒定。
211086679_新型排水管道清淤机器人的结构设计与分析
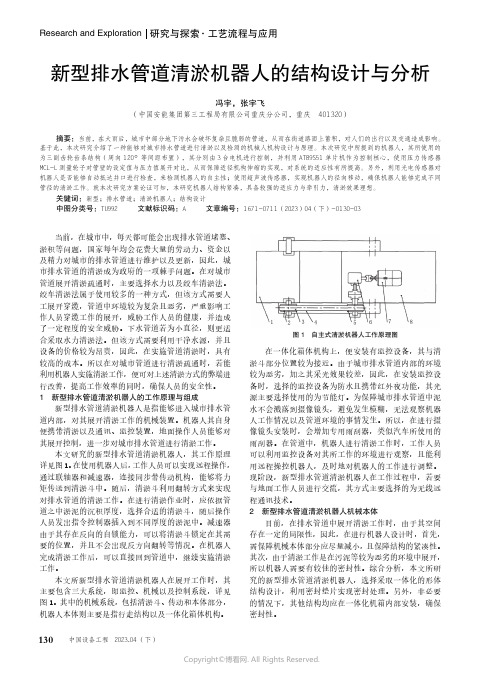
图1 自主式清淤机器人工作原理图
在一体化箱体机构上,便安装有监控设备,其与清淤斗部分位置较为接近。
由于城市排水管道内部的环境较为恶劣,加之其采光效果较差,因此,在安装监控设备时,选择的监控设备为防水且携带红外夜功能,其光源主要选择使用的为节能灯。
为保障城市排水管道中泥水不会溅落到摄像镜头,避免发生模糊,无法观察机器人工作情况以及管道环境的事情发生。
所以,在进行摄像镜头安装时,会增加专用雨刮器,类似汽车所使用的雨刮器。
在管道中,机器人进行清淤工作时,工作人员可以利用监控设备对其所工作的环境进行观察,且能利用远程操控机器人,及时地对机器人的工作进行调整。
现阶段,新型排水管道清淤机器人在工作过程中,若要与地面工作人员进行交流,其方式主要选择的为无线远
利用新型排水管道清淤机器人进行城市排水管道清淤,可以提高工作效率,降低城市排水管道清淤的总成本。
管道机器人结构与通过性分析
管道机器人结构与通过性分析李智强1李卫国2冯志成3王利利2闫文刚1郭世杰1(1内蒙古工业大学机械工程学院,内蒙古呼和浩特010051)(2内蒙古工业大学工程训练教学部,内蒙古呼和浩特010051)(3三峡新能源内蒙古分公司,内蒙古呼和浩特010051)摘要针对现有油气管道检测机器人运动方式单一、管径适应范围小、机器人在管道中通过性与适应性差等问题,设计了一种新型变运动方式管道机器人。
给出机器人的设计需求,介绍了机器人的整体结构与工作原理;提出了主副簧结合、共同预紧的被动支撑机构和具有倾角可调功能的驱动机构;对支撑机构受力进行分析,同时对机器人通过弯管时的尺寸约束条件与运动约束条件进行分析,并进行了实验验证。
结果表明,机器人的结构设计与计算合理,机器人在弯管中的尺寸约束与运动约束分析是正确的,机器人可以顺利通过R≥1.5D的弯管环境。
该研究结果为后续机器人仿真实验与样机制作提供了参考。
关键词管道机器人结构设计弯管通过性Structural and Passability Analysis of Pipeline RobotLi Zhiqiang1Li Weiguo2Feng Zhicheng3Wang Lili2Yan Wen´gang1Guo Shijie1(1School of Mechanical Engineering,Inner Mongol University of Technology,Hohhot010051,China)(2Engineer Training Teaching Department,Inner Mongol University of Technology,Hohhot010051,China)(3Inner Mongolia Branch of Three Gorges New Energy,Hohhot010051,China)Abstract Aiming at the problems of the existing oil and gas pipeline inspection robots,such as single mo⁃tion mode,small pipe diameter adaptation range,poor passing ability and adaptability of the robots in pipelines,a new pipeline robot with variable motion mode is designed.The design requirements is presented and the over⁃all structure and working principle of the robot is introduced,the support organization with the combination of main and auxiliary springs to achieve common preloading and drive structure with adjustable angle function are further proposed and analyze force.At the same time,the dimension constraints and motion constraints of the ro⁃bot through the elbow pipe are analyzed.Finally,experimental verification is carried out.Experimental results show that the structure design and calculation of the robot are reasonable,the size and motion constraint analysis of the robot in the bend pipe are correct,the robot can successfully pass the bend pipe with R≥1.5D.The re⁃search results provide a reference for the follow-up robot simulation experiment and prototype manufacture.Key words Pipeline robot Structural design Bend pipe passability0引言随着社会的发展,国家对石油、天然气能源的使用需求持续增大,管道这种经济高效的运输方式被广泛使用。
国内管道修复机器人系统组成
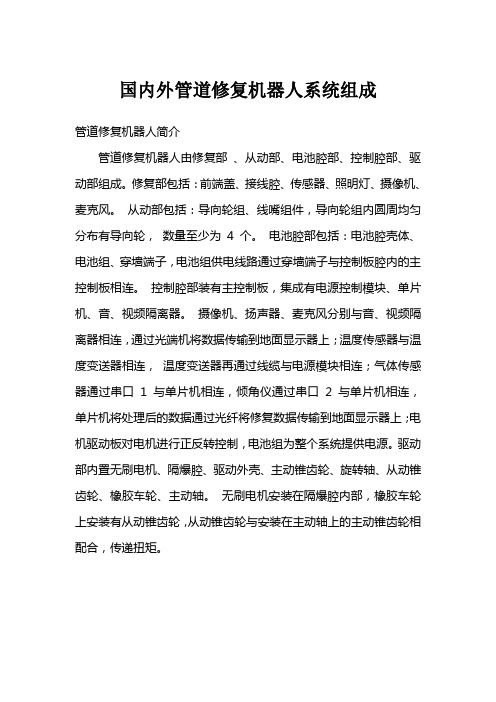
国内外管道修复机器人系统组成管道修复机器人简介管道修复机器人由修复部、从动部、电池腔部、控制腔部、驱动部组成。
修复部包括:前端盖、接线腔、传感器、照明灯、摄像机、麦克风。
从动部包括:导向轮组、线嘴组件,导向轮组内圆周均匀分布有导向轮,数量至少为4个。
电池腔部包括:电池腔壳体、电池组、穿墙端子,电池组供电线路通过穿墙端子与控制板腔内的主控制板相连。
控制腔部装有主控制板,集成有电源控制模块、单片机、音、视频隔离器。
摄像机、扬声器、麦克风分别与音、视频隔离器相连,通过光端机将数据传输到地面显示器上;温度传感器与温度变送器相连,温度变送器再通过线缆与电源模块相连;气体传感器通过串口1 与单片机相连,倾角仪通过串口2 与单片机相连,单片机将处理后的数据通过光纤将修复数据传输到地面显示器上;电机驱动板对电机进行正反转控制,电池组为整个系统提供电源。
驱动部内置无刷电机、隔爆腔、驱动外壳、主动锥齿轮、旋转轴、从动锥齿轮、橡胶车轮、主动轴。
无刷电机安装在隔爆腔内部,橡胶车轮上安装有从动锥齿轮,从动锥齿轮与安装在主动轴上的主动锥齿轮相配合,传递扭矩。
管道修复机器人系统的工作过程:尼龙轮安装在转动臂上,通过扭转弹簧提供支撑力,使得橡胶车轮、尼龙轮同时与管道(或救援孔)内壁相接触,由此橡胶车轮、尼龙轮分别与管道(或救援孔)内壁产生摩擦力,无刷电机通电,带动橡胶车轮旋转,通过控制器控制管道机器人的前进、后退、停止。
宁波广强机器人科技有限公司自主研发的DG300普及型管道机器人DG300普及型管道机器人是一套综合运用CCTV、声纳和激光的检测设备,适用于管径300mm-2000mm管道的检测。
对管道的水下部分进行声纳检测,水上部分进行CCTV和激光检测。
可以全面的反应监测管道内部情况,结合数据处理软件可以生成管道的剖面图,分析管道的形变、淤积状况,生成标准检测报告。
已经达到国内一流水平,拥有发明专利的多种埋钉机填补同行业空白。
排水管道机器人综述
排水管道机器人综述排水管道机器人综述陈松李天剑王会香刘相权(北京信息科技大学智能机器人技术研究所,北京,100192)摘要:排水管道机器人通常采用模块化设计,一般分为爬行器、电缆绞盘、上位控制单元、检测单元、辅助装置、图像处理软件等模块。
本文介绍排水管道机器人各模块现有技术特点,并结合智能控制技术,展望未来排水机器人发展方向。
关键词:机器人,排水管道,模块化,技术展望0 引言排水系统被形象地比做城市的命脉,保证排水系统的正常运转,对于保护环境、减少污染、提高人民健康水平、维持城市的正常工作、生活秩序有着非常重要的意义[1]。
因此,为保证排水管道的正常使用,就必须对排水管道进行检测维护,排水管道机器人应运而生。
管道机器人是一种可沿管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统[2-3]。
1 排水管道机器人模块1.1 爬行器排水管道机器人按爬行器行走方式可分为轮式管道机器人[4]、履带式管道机器人[5]、腿式管道机器人[6]、蠕动式管道机器人[7]。
目前市场上排水管道机器人以轮式管道机器人居多。
1.1.1 轮式管道机器人按行走机构划分,轮式管道机器人可分为支撑轮式和车型式两类。
支撑轮式管道机器人[7]采用对称分布的行走结构,支撑轮紧贴在管道表面,对管道表面有较大压力,行走能力强,可在有较大倾角的排水管道中行走。
在理论上,该机器人的中心与管道中心重合,机器人运动稳定性好。
支撑轮式管道机器人一般具有变径机构,以适应不同管径的管道。
图1 MRINSPECT IIMRINSPECT II采用多节方式,各节间通过可控万向铰连接,可通过弯管接头,采用弹簧支撑式连杆机构[8]。
车型式管道机器人[7]在管道底部行走,具有结构简单、行走连续平稳、运动灵活等优点。
车型式管道机器人靠自身重量提供正压力,因此不能在大倾角的管道中行走。
管道机器人的发展现状与其趋势

管道机器人的发展现状与其趋势管道机器人的发展现状及其趋势摘要:管道机器人是一种新型机器人能沿着管壁行走并携带传感器和操作设备。
文章通过对管道机器人的研究,对管道机器人的发展现状及趋势做出分析。
关键词:管道机器人;发展;现状前言随着社会的进步机器人的使用愈来愈普及。
管道机器人是一种新型机器人,可沿着管道内外行走,还能携带传感器来进行完成管道内外作业的机电一体化系统,由行走机构、信号传递、动力传输系统、内部识别检测系统、控制系统等组成[1]。
1管道机器人的分类1.1按能源供给方式分类管道机器人的分类很多可以按其能源供的给方式分:有缆以及无缆。
两者的特点如表1所示。
1.2按行走机构分类按行走机构划分管道机器人主要有以下几种:(1)活塞移动式,原理是活塞在汽缸内的移动运动。
管道机器人的外径略大于管道内径,当其经过的流体形成压力差时,形成的压力差可以克服阻力而运动,根据需要可以加上传感器。
(2)蠕动移动式,其原理设计是模仿昆虫移动。
在行走时,分别使左右支撑足上面与管壁接触下面通过管壁接触滚轮使蠕动丝杠左转和右转,使螺母在丝杠上左右移动。
(3)履带移动式,根据履带式车辆行走的原理,采用带齿轮减速箱的直流电机驱动而形成的移动。
(4)足腿移动式,是足腿压着管壁支撑主体,采用多腿在各种形状的弯管内移动,可在各种类型的管道里移动,其运动较为方便灵活。
(5)滚轮移动式,行走结构是依靠滚轮驱动电机驱动,一般轮径较小会有限制,并且其越障能力也有限[2]。
随着科技的进步发展会有越来越多的类型的管道机器人设计开发使用。
2管道机器人在国内外的发展1.3管道机器人在国内发展国内在管道机器人方面的研究起步较晚。
哈尔滨工业大学的邓宗全教授最先研究轮式行走的管道机器人,主要用于大口径管道的自动化检测。
上海大学最先研制了细小工业管道机器人的移动探测器及集成系统可实现20毫米管道内探测。
近几年,管道机器人的形式样式与应用场合更加灵活与常见。
管道机器人及其应用_教案_图文(精)
管道机器人及其应用_教案_图文(精)第一篇:管道机器人及其应用_教案_图文(精)管道机器人及其应用Robotics SEU-Q Sunday, April 03, 20111 •管道机器人的应用领域工业管道,工程管道,微型管道。
•管形圆形,矩形,定直径直管,含直角弯头(L形,T形、弯道、台阶、凹坑、径向尺寸变化的管道,水平、倾斜、铅垂布置。
•管道机器人的作业类型管内作业(管内不同介质,管外作业,管间作业Robotics SEU-Q Sunday, April 03, 20112 Robotics SEU-Q Sunday, April 03, 20113 •管道机器人的自身功能特定管况下行进定位负载密封防腐数据传输,等•管道机器人的用途(外延功能管道环境信息获取,管道工况检测与故障修复,管内障碍检测与排除,管道清洗,管道表面喷涂,工程验收,等。
直行(前进、后退、转弯;行进方式:轮式,足式,爬行式,蠕动式,履带式履带式,可在竖直管道内上下运动 Robotics SEU-Q Sunday, April 03, 20116Robotics SEU-Q Sunday, April 03, 20117爬竿管道两用机器人Robotics SEU-Q Sunday, April 03, 20118Robotics SEU-Q Sunday, April 03, 20119Robotics SEU-Q Sunday, April 03, 201110螺旋传动管道机器人RoboticsSEU-QSunday, April 03, 201111管道爬行器 Robotics SEU-Q Sunday, April 03, 201112细小工业管道机器人移动探测系统——上海大学研制螺旋轮式推进Robotics SEU-Q Sunday, April 03, 201113Robotics SEU-Q Sunday, April 03, 201114Robotics SEU-Q Sunday, April 03, 201115管道清洗机器人中央空调管道或除尘管道的清扫、消毒、喷涂、摄像检测等。
河道自动化清淤机器人分解PPT教案
7 机器人坝上行走过程
灌区河道自动化——泥沙清淤机器人
第8页/共18页
工作过程
8
2、结合现有成熟的履带挖 掘机、起重机和高空作业车相 关技术,整合并完善到该机器 人上,使得行走起来更稳定, 直接就能行使到需要清理的河 段,减少了用大型机械来回转 运的麻烦。
机器人下坝过程
灌区河道自动化——泥沙清淤机器人
14
(3)该机器人是一种使 用方便、操作简单的、工 作效率高,在一定程度上 能够实现清淤的功能。整 个清淤过程仅需一个人在 岸上操作即可完成,安全、 高效,节省人力、财力、 物力,大大减轻劳动强度, 减少了国家专项资金的投 入,另外它坚固耐用,一 次投入可长久使用,结构 简单,便于维修,机动灵 活,效率高、维护方便, 适应性较强,而且其操作 仅需一人,符合国家所提 出的可持续发展的理念。
待该处清理完毕后控制机器人自行驶入下一河段进行清理作业。 为了保证清理的彻底性,在搅动装置旋转时,可控制机器人进行360度旋转,旋 转同时旋转搅动装置持续作业,从四面全方位进行疏通清理。
灌区河道自动化——泥沙清淤机器人
第7页/共18页
工作过程
1、普通含有履带的车、 机器人都是采用铁作为履带 的材料,而该机器人的履带 采用人工橡胶合成材料,这 样既节约了金属,又减少了 因为机器人在坝上行走而给 坝体带来的破坏。机器人的 这种履带能够在坝上很稳定 的来回走动,而不产生任何 破坏。
灌区河道自动化——泥沙清淤机器人
第2页/共18页
2
设计目的
本作品根据现今黄河泥沙淤积,传统清淤机器功率大、能耗高、挖泥浅, 将淤泥运出原有河床的机械清淤方法根本无法解决大面积水域清淤问题 的现状,引入较为成熟的履带挖掘机行走技术,起重机和高空作业车伸 缩臂技术,设计出的一种灵活、高效、操作简单的河道自动化清淤机器 人。该机器人的高效性在于它能潜入水中,对堵塞河段进行直接清理作 业,在一定程度上能摆脱了过去泥沙清理不彻底的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018/8/10
0.002 s
0.012 s
20
管道机器人——履带式
履带式
变位履带式机器人 爬坡能力强
21
2018/8/10
管道机器人——轮式
轮式
轮式两用机器人
采用轮式移动机构,这种移动机构在管 道接头部分或者管道里污垢沉积较多时 就不能行走自如
2018/8/10 22
管道机器人——腿式
腿式
实现了管内外机构同步运动作业无缆操作技术
2018/8/10 12
国内外研究
上海大学 研制了“细小工业管道机器人移动探测器
集成系统”。
其主要包含: 20mm 内径的垂直排列工业管道中的机器人机构和 控制技术(包括螺旋轮移动机构、行星轮移动机构和压电 片驱动移动机构等)、机器人管内位置检测技术、涡流检 测和视频检测应用技术, 在此基础上构成管内自动探测机 器人系统。 该系统可实现 20mm 管道内裂纹和缺陷的移动探测。
2018/8/10
9
国内外研究
美国 纽约煤气集团公司(NYGAS) 的Daphne D‘Zurko
和卡内基梅隆大学机器人技术学院的Hagen Schempf 博士在美国国家航空和宇宙航行局(NASA)的资助下 于2001年开发了长距离、无缆方式的管道机器人系统— ——EXLORER。
பைடு நூலகம்
主要特征:
① ② ③ ④ 一次作业检测距离长,采用无缆方式; 可以在铸铁和钢质煤气管道中,低压和高压条件下工作; 可以顺利通过90°的弯管接头和垂直管道; 与外部采用无线通讯方式;
2018/8/10
2
研究背景意义
管道机器人的由来
20世纪70年代以来, 石油、化工、天然气及核工业 等产业迅速发展, 各种管道作为一种重要的物料输送设 施, 得到了广泛应用。 但是它们常架设在空中或埋在地下,形成错综复杂 的管网。 受空间或地理位置的限制,人们很难直接介入,使人工 检修不仅困难,而且成本高。 同时由于腐蚀、重压等作用, 管道不可避免地会出 现裂纹、漏孔等现象。而管道所处的环境往往是人们不 易或不能直接接触的。 管道机器人 应运而生
2018/8/10
10
国内外研究
国内 在管道机器人方面的研究起步较晚, 而且多数
停留在实验室阶段。 目前国内外管道机器人的研究成果已经很多,可是在 微小管道、特殊管道(如变径管道、带有U型管的管道) 进行检测、维修还刚起步,但是由于该类管道在各个 领域的广泛应用,因此研发该类机器人极具吸引力。
2018/8/10
2018/8/10 27
实例——空调管道机器人
传统空调管道清洗 系统结构: 1.气囊, 2.吹扫装置, 3. 被清洗风道, 5.软管, 8.大功率风机 9. 集尘净化器,
工作原理:
封闭管道内产生压差, 扫落的灰尘被压入净化器。
2018/8/10
灰尘清理: 纵向移动——工人的推送软轴实现; 横向移动——清洗电机切换旋转方向 实现。 28
2018/8/10 5
管道机器人
管道机器人常用于石油、化工、核工业、 城建等许多工程管道的管道质量检测、探 伤、故障诊断、清洁、喷涂、焊接、管道 维修等众多方面……
2018/8/10
6
国内外研究
由于70年代 微电子技术、计算机技术、 自动化技术的发展,
国外关于燃气管道机器人的研究 始于20世纪40年代; 管道检测机器人技术于90年代初得到了迅 猛发展并接近于应用水平。 一般认为,法国的J.VERTUT 较早从事管 道机器人理论和样机的研究,1978年他提出 了轮腿式管内行走机构模型IPR IV,该机构 虽然简单,但起了抛砖引玉的作用。 2个行走轮 4个支撑轮 腿:电机驱动 (以适应不同管径)
1、16:电机 2 螺杆,5 螺母 4 拔销,7 拔杆 9 支撑杆 12 脚靴 21 万向节
腿式机器人结构图——太原理工大学
2018/8/10
23
管道机器人——蠕动式
蠕动式
活塞左移—DE连杆拉紧 —构件BCD撑紧 上海交通大学 小口径管道内蠕动式机器人
2018/8/10 24
管道机器人——流体压力驱动
2018/8/10
31
空调管道机器人——问题解决
解决方法:
① 模块化组合式结构,适应不同尺寸的管道; ② 采用 Maxon 空心杯电机,行进电机选取A-MAX32型号: 最大输出功率为15W,配合减速箱,其最大输出扭矩可达 4.5N.m;驱动我们的机器人可产生的最大拉力在100N以上; ③ 行进偏差问题的解决, 电机配有数字编码器,对电机转速实现闭环控制; ④ 采用SONY FCB一EX480一体化摄像机: 具有超强的感光能力、智能化的自动夜视功能,可以对摄像机 的全部参数进行远程动态设置。通过调节关学和数字参数,在光源 充足的情况下,它能够观察到5米外直径为lmm的丝状物体; ⑤ 照明灯采用大功率超高亮度发光二极管: CEWH05P60型号额定功率为5W,其直径仅为15mm,亮度高 达110流明。通过调节驱动电路中的电位器,可实现亮度调节;
管道机器人
Pipe Robot
演讲者: 上海大学
机械电子工程专业
研究背景意义
特种机器人,是指除工业机器人之外的、用于非制造业并服务于人类 的各种先进机器人。 包括:服务机器人、水下机器人、娱乐机器人、军用机器人和管道机器 人等。
管道的 空间、路况、光线,以及 工作环境的限 制
管道机器人 区别于其他机器人,又有它的 用武之地
2018/8/10 14
管道机器人——行走条件
一般管道机器人欲在管内平稳、可靠的启停、行走, 必须满足以下几个基本条件:
形封闭:机器人在管道中工作时,为了能够保持 一定的姿态,不出现倾覆、扭转等现象,这就要求 管道对机器人施加的一个封闭的形状约束; 力封闭:移动机构在行走过程中,应具备支撑在 管道内壁上而不失稳的能力,即机器人的支撑机构 受到管道的径向支反力而组成的一个封闭力多边形。 驱动行走:指行走机构具有主动驱使机构。
实例——空调管道机器人
传统空调管道清洗
主要弊端:
① ② ③ ④ ⑤ 清扫装置的移动不方便, 易出现清洗死角; 软轴推送受制多多; 软轴过长,将带来存放问题; 需要较多劳动力……
2018/8/10
29
实例——空调管道机器人
空调管道机器人
无需手工推送操作; 机器人携带吹扫装置,如气鞭、 气锤或者清扫刷, 还可配有CCD,供管外人员观察, 处理死区或管道分支。
作业类型 管外作业 管间作业 管内作业
管道类型 圆形,矩形,定直径直管; 含直角弯头(L 形,T 形)、弯道、台阶、 凹坑、径向尺寸变化的管道; 水平、倾斜、铅垂布置。
2018/8/10 17
管道机器人——作业方式
管外移动机器人 只适于暴露在外的管道作业,需要多个 自由度的协调运动才能跨越管道支架、 接头等障碍,灵活性要求高,移动机构 设计复杂,使控制难度增加,工作可靠 性降低。 管内移动机器人 目前以直管和圆弧弯管应用为主,实现 移动的可控自由度少,可靠性提高。但 受管内有限空间和机器人结构尺寸的限 制,尤其是通过小管径弯管,大功率驱 动机器人的研制难度要增大。 管道爬竿两用机器人
2018/8/10 18
管道机器人——行进方式
行进方式分类
(a) (b) (c) (d) (e) (f) (g)
摆动式 轮式 蠕动式 顶壁式 腿式 尺蠖 旋转
下面,我们将详细予以介绍:
2018/8/10 19
管道机器人——摆动方式
摆动式
Carnegie Melllon University 仿生机器人实验室 tube climbing robot
2018/8/10 3
研究背景意义
案例
2005年,上海在采用“凤凰工艺”对旧煤气 管道进行改造时,运用了可视屏幕遥控操作 的管道机器人进入管道进行全面巡查和修补 作业,取得了较好的效果,实现了地下管道 非开挖修复,成功地在延安东路闹市区施工, 修复了一条长1500m的地下煤气管道。
中央空调风管内的灰尘等是传播病毒的载体。 科学家曾做过一项对比实验: 开空调1小时后,室内空气中细菌的含量是不开 空调房间内的3一4倍。 城市“大楼病”的诸多病因中,中央空调常常是 罪魁祸首。 因此需要重视中央空调管道的清洗。
2018/8/10 4
管道机器人
管道机器人是一种可沿管道内部或外 部自动行走的特种机器人
它可以携带一种或多种传感器及操作装置,在操 作人员的遥控操作或自动控制下,能够进行一系 列的管道检测维修作业的机电一体化系统。
CCD摄像机、位置和姿态传感器、 超声传感器、涡流传感器、 管道清理装置、管道裂纹 及管道接口焊接装置、防腐喷涂装置、 简单的操作机械手等
2018/8/10
7
国内外研究
日本 管道机器人的研究众多,
如,东京工业大学航空机械系Shigeo Hirose 和 Hidetaka Ohno等,于1993年开始研究管道机器人, 先后研制成功了:
适用于φ 25mm 管道的Thes-Ⅳ型管道机器人 适用于φ 50mm 管道的Thes-Ⅰ、Thes-Ⅱ型管道 机器人 适用于φ150mm 管道的Thes-Ⅲ型 管道机器人。
11
国内外研究
哈尔滨工业大学 邓宗全教授在国家“863”计划课
题“X射线检测实时成像管道机器人的研制”的支持下, 开展了轮式行走方式的管道机器人研制。 研究成果主要用于大口径管道的自动化无损检测。 并相继进行了管道机器人 弯道通过性、弯道驱动控制 等方面的理论实践研究。
该机器人特点: • • 适应大管径(大于或等于<900mm) 的管道焊缝X射线检测。 一次作业距离长, 可达2km。
螺旋轮式
万向节
定子结构图
转子结构图
2018/8/10 26