简易旋转倒立摆及控制系统的设计与实现 简易旋转倒立摆及控制装置——直流电机
简易旋转倒立摆及控制装置(C题 )

简易旋转倒立摆及控制装置(C题)一、任务设计并制作一套简易旋转倒立摆及其控制装置。
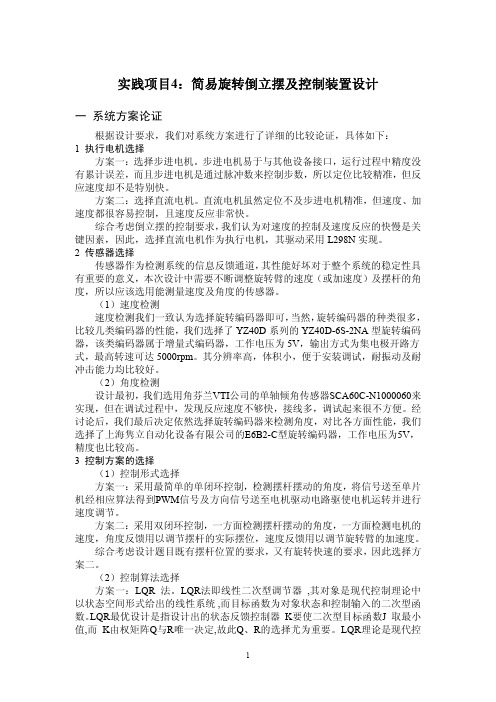
旋转倒立摆的结构如图1所示。
电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转。
摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
图1旋转倒立摆结构示意图二、要求1.基本要求(1)摆杆从处于自然下垂状态(摆角0°)开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;(2)从摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;(3)在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤除同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动角度不大于90°。
2.发挥部分(1)从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立状态时间不少于10s;(2)在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s内恢复倒立状态;(3)在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°;(4)其他。
三、说明1.旋转倒立摆机械部分必须自制,结构要求如下:硬质摆杆E通过转轴D连接在旋转臂 C边缘,且距旋转臂C轴心距离为20cm±5cm;摆杆的横截面为圆形或正方形,直径或边长不超过1cm,长度在15cm±5cm范围内;允许使用传感器检测摆杆的状态,但不得影响摆杆的转动灵活性;图1中支架B的形状仅作参考,其余未作规定的可自行设计结构;电动机自行选型。
2.摆杆要能够在垂直平面灵活旋转,检验方法如下:将摆杆拉起至水平位置后松开,摆杆至少能够自由摆动3个来回。
3.除电动机A之外,装置中不得有其他动力部件。
4.摆杆自然下垂状态是指摆角为0°位置,见图2。
倒立摆

简易旋转倒立摆及控制装置摘要倒立摆是理想的自动控制理论研究实验平台,许多抽象的控制概念如系统稳定性、可控性、抗干扰能力等,都可以通过倒立摆直观地表现出来。
因此,对倒立摆的控制研究不仅具有理论意义而且具有实际意义。
本装置就以简易旋转倒立摆为研究对象,建立了简易旋转倒立摆的物理模型。
Abstract:Inverted pendulum is an ideal experimental platform of automatic controltheory research, many abstract concepts such as the control of system stability, controllable, anti-interference ability, etc., can be displayed visually through the inverted pendulum. Therefore, research on the control of the inverted pendulum not only has theoretical significance and practical significance. This device is simple and rotational inverted pendulum as the research object, established the simple physical model of rotational inverted pendulum.一.系统方案1.系统结构简易旋转倒立摆包括摆杆,电机、传动部件、支架及其控制系统,摆杆通过传动部件与电机轴相连;传动部件为一刚性旋臂,其一端与电机轴固接、另一端与摆杆铰接,电机轴为水平方向,旋臂和摆杆的回转面均为竖直方向。
该装置主要由转轴电机、旋转臂及摆杆三部分构成,2.方案比较与选择1.测量角度的传感器选择(1)加速度传感器(2)角速度传感器(3)光电编码器(4)本装置使用的传感器——MPU6050角速度传感器2.单片机的选择(1)AT单片机AT系列51单片机是USA的产品,品种单一,功能少,运行速度慢,RAM/ROM小,性能还不够稳定;而且AT系列单片机一般用下载器进行烧写程序,理论上可以直接用单片机的几根I/O口接并口线,但如果电路板没做好,可能会连带把计算机并口烧坏,因此AT系列单片机无法完成我们设计的要求。
简易旋转倒立摆控制系统设计_曾敬

感器检测到的摆杆位置,做出相应的电机转速
的调节,从而使摆杆达到预定的状态。系统的
主程序流程如图3所示。
四、测试结果
本系统从以下三个方面对倒立摆进行了测
试 1.摆杆从处于自然下垂状态(摆角0o)开
始,驱动电机带动旋转臂作往复旋转使摆杆摆 动,并尽快使摆角达到或超过-60o~+60o;
2.从摆杆处于自然下垂状态开始,尽快增 大摆杆的摆动幅度,直至完成圆周运动;
图1 模糊控制的基本结构
二、系统总体设计框图 本系统主要由主控模块、角度传感器模 块、机械结构模块、电源模块、电机驱动模块 等几部分组成。为了让摆杆有更大的惯性,带 动摆杆旋转更大的角度,在设计中,我们设定 电机正反转存在一定的角度差。电机转动角度 差一般设定在30o以内,如果角度差太大,会迫 使还处于上一个惯性状态的摆杆改变状态,这 样将不能实现增大惯性作用,反而使摆杆摆动 角度变小。当电动机驱动摆杆转到360°,且 倒立时,采用角度传感器检测摆杆摆动方位, 控制电动机于摆杆摆动方向想一致,进而实现 摆杆倒立。在整个该过程中,为了确保电动机 在调整速度的同时维持系统稳定,主控芯片会 通过驱动电路发出脉冲指令,控制电动机作相 应的微调,从而完成动作。本系统主要通过 AT89S52单片机来控制电路的输出,使用模糊 控制算法,实现按键控制、电机转动、倒立摆 旋转、液晶显示等功能。角度传感器模块在系 统中的作用是检测摆杆与水平面的夹角,进而 将数据反馈给主控芯片,主控芯片以此来发出 控制指令。电路设计总体框图如图2所示。
[3]周伟,宋学伟.客车车身结构拓扑优化设计[J].客车技 术与研究,2012(6):9-10. [4]ROSSOW M P,TALOR J E. A finite element method for the optimal design of variable thickness sheets[J].AIAA Journal,1973,11(11):1566-1569.
简易旋转倒立摆及控制装置

简易旋转倒立摆及控制装置设计报告及总结摘要倒立摆系统机理的研究不仅具有重要的理论价值,而且具有重要的现实意义,是控制类中经久不衰的经典题型。
本题中,简易旋转倒立摆,在C8051F040单片机的基础上,使用ZGB42FM直流减速电机,BTN7971B电机驱动,可变电阻(角度传感器),机械摆杆等模块。
通过编写、烧入程序,调控硬件协调工作,使摆杆首先实现一定角度的转动,再完成圆周运动,以及保持竖直向上的倒立状态。
用以满足题目的基本要求,进而深一步探究倒立摆在保持运动姿态方面的发展与应用。
关键字:单片机,倒立摆,摆杆,可变电阻。
引言:本题整体上只由一个电机A 提供动力,电机直接控制旋转臂C 做往复旋转运动,而通过转轴D 连接在旋臂C 上的摆杆E 是非常灵活的。
旋臂C 转动一定角度时,摆杆E 由于向心力会使摆杆E 继续向上旋转,以达到E 杆转动一个角度的效果。
相似,当C 的转动速度比较快,停下后,E 下端处的速度和向心力都比较大,能够使E 杆完成圆周运动。
为了使摆杆能够倒立,就要求摆杆转动到上半圆周面时,要通过单片机控制电机A 不断的调整使旋转臂C 转动多个角度,尽量的使摆杆E 与竖直面的角度变小,并能够受力平衡,这样就可以保持一段时间的倒立状态。
为达到角度的调整,就要测量出E 杆与竖直面间的角度差,经过单片机的控制,使电机A 做出相应的旋转动作,减小这个角度差。
1、方案设计与讨论: 1.1结构框图1.2方案论证: 1.21控制器模块本题,单片机只要接收来自传感器的信号,向电机驱动输入信号处理后计算出的高低电平即可。
方案一:用ATMEL 公司生产的AT89S52单片机,低功耗,高性能CMOS 8位处理器,使用广泛,算法较为简单,但是在执行复杂动作时,处理速度不够高。
方案二:用宏晶公司生产的STC89C52RC 单片机,STC 的单片机性能与ATMEL 的单片机相似,但是价格相对便宜。
缺点是易受潮湿影响,在调用子程序是频繁出错。
简易旋转倒立摆及控制装置(C题)

简易旋转倒立摆及控制装置(C 题)摘要:本系统以由stc12单片机作为中心控制系统,由编码器模块、电机驱动模块、液晶显示模块、电源电路组成。
角度监测模块采用采用双向编码器,实时测量摆杆与垂直方向的夹角;电机驱动部分使用BTS7960驱动芯片驱动直流电机较精确地控制摆杆的灵敏度;人机交互界面采用LCD液晶5110显示摆杆的摆角,具有操作简单,控制界面直观、简洁,系统性能指标达到了设计要求,工作可靠,功耗低,具有良好的人机交互性能。
关键字:stc12 编码器BTS79605110显示器Digest:This system by stc12 single chip microcomputer as the central control system, by the encoder module, motor drive module, liquid crystal display module, power supply circuit. Point of view, the real time monitoring module adopts the bidirectional encoder measuring Angle of swinging rod and the vertical direction; Motor drive part use BTS7960 driver chip driven dc motor accurately control the sensitivity of swinging rod; The human-computer interaction interface adopts LCD liquid crystal display of swinging Angle of swinging rod of 5110, with the features of simple operation, intuitive control interface, concise, system performance index has reached the design requirements, reliable operation, low power consumption, has the good man-machine interactive performance.Key words: stc12 encoder BTS7960 drive 5110 displays一、引言本题目要求设计一个简易旋转倒立摆及其控制装置,它由三部分构成,系统构成如图1-1:①摆架系统:支架,摆杆,底座,平板,旋转臂,旋转臂连接摆杆顶部固定在电机上;②驱动控制系统:单片机,直流电机,电机驱动器,电源,用以控制电机带动旋转臂转动;③检测系统:通过编码器检测出摆杆与垂直方向的倾角,将数据传给单片机。
电子设计大赛培训简易旋转倒立摆及其控制装置大学论文

简易旋转倒立摆及其控制装置简易旋转倒立摆及其控制装置摘要本系统设计实现了一种单输入,单输出的旋转式倒立摆闭环控制系统。
它通过改变伺服电机的转速来实现摆杆倒立,而摆杆的转角则作为调节电机转速的参数。
本系统以MSP430F149单片机为控制核心,硬件包括电源模块,单片机控制模块、按键选择模块、数据显示模块、电机驱动模块、角度检测模块。
首先由按键选择倒立摆的工作模式,单片机通过驱动控制电机的转速,改变摆杆的转角。
编码器检测摆杆的转角,将数据反馈给单片机,单片机对数据进行分析处理后输出PFM波调节电机转速。
软件部分应用C语言实现系统的基本功能,采用位置式PID控制算法进行数据处理。
关键词:旋转倒立摆;编码器;PID1 方案论证与比较1.1 系统总方案描述本系统主要包括电源模块,单片机控制模块,按键选择模块、电机驱动模块、角度检测模块和数据显示模块。
系统以MSP430F149单片机为控制核心,采用36V 直流电给驱动供电。
由按键选择倒立摆的工作模式,单片机通过驱动控制电机转动,电机上装有20cm 的旋转臂,电机高速旋转带动旋转臂。
旋转臂与摆杆之间装编码器,编码器检测摆杆的转角,并将数据反馈给单片机,位置式PID 控制算法对数据处理后,单片机输出PFM 波控制驱动改变伺服电机的转速。
图1-1为系统总体框图。
驱 动电 源电 机编码器MSP430F149按键输入数据显示图1-1 系统总体框图控制模块的论证与比较方案一:采用51单片机作为本系统的主控制芯片。
51系列单片机功耗较高,8位微型处理器运算速度慢,无硬件乘法器,片内资源少。
但价格低廉,使用简单。
方案二:采用MSP430F149.单片机作为本系统的主控制芯片MSP430F149单片机德州仪器开发的一种超低功耗微控制器,它是一款16位单片机,内含12位快速ADC ,只需外接一个电阻、一个电容即可实现高精度斜率A/D 转换。
并且具有运算速度快,精度高,执行能力强,中断源多等优点。
实践项目4:简易旋转倒立摆及控制装置设计
实践项目4:简易旋转倒立摆及控制装置设计一系统方案论证根据设计要求,我们对系统方案进行了详细的比较论证,具体如下:1 执行电机选择方案一:选择步进电机。
步进电机易于与其他设备接口,运行过程中精度没有累计误差,而且步进电机是通过脉冲数来控制步数,所以定位比较精准,但反应速度却不是特别快。
方案二:选择直流电机。
直流电机虽然定位不及步进电机精准,但速度、加速度都很容易控制,且速度反应非常快。
综合考虑倒立摆的控制要求,我们认为对速度的控制及速度反应的快慢是关键因素,因此,选择直流电机作为执行电机,其驱动采用L298N实现。
2 传感器选择传感器作为检测系统的信息反馈通道,其性能好坏对于整个系统的稳定性具有重要的意义,本次设计中需要不断调整旋转臂的速度(或加速度)及摆杆的角度,所以应该选用能测量速度及角度的传感器。
(1)速度检测速度检测我们一致认为选择旋转编码器即可,当然,旋转编码器的种类很多,比较几类编码器的性能,我们选择了YZ40D系列的YZ40D-6S-2NA型旋转编码器,该类编码器属于增量式编码器,工作电压为5V,输出方式为集电极开路方式,最高转速可达5000rpm。
其分辨率高,体积小,便于安装调试,耐振动及耐冲击能力均比较好。
(2)角度检测设计最初,我们选用角芬兰VTI公司的单轴倾角传感器SCA60C-N1000060来实现,但在调试过程中,发现反应速度不够快,接线多,调试起来很不方便。
经讨论后,我们最后决定依然选择旋转编码器来检测角度,对比各方面性能,我们选择了上海隽立自动化设备有限公司的E6B2-C型旋转编码器,工作电压为5V,精度也比较高。
3 控制方案的选择(1)控制形式选择方案一:采用最简单的单闭环控制,检测摆杆摆动的角度,将信号送至单片机经相应算法得到PWM信号及方向信号送至电机驱动电路驱使电机运转并进行速度调节。
方案二:采用双闭环控制,一方面检测摆杆摆动的角度,一方面检测电机的速度,角度反馈用以调节摆杆的实际摆位,速度反馈用以调节旋转臂的加速度。
简易旋转倒立摆及控制装置的设计

简易旋转倒立摆及控制装置的设计徐泽远【期刊名称】《安徽农业科学》【年(卷),期】2014(000)026【摘要】[目的]设计并制作一套简易旋转倒立摆及其控制装置.[方法]采用9S12XE 单片机作为简易旋转倒立摆及控制装置的监测和控制系统的核心,采用L298驱动直流电机作为动力.通过编码器及最优控制策略LQR在平衡点附近给出系统的线性化模型,对系统的稳定性、能控性进行调试.[结果]应用Lagrange方程对试验采用的单级旋转倒立摆系统进行建模,获得了旋臂长度(r)、水平和竖直方向的角位移(Q)、摆杆质心与铰链距离(L)4者的最佳平衡点与动态方程;优化LQR控制器获得最优状态反馈增益矩阵;进行计算机编程,应用9s12XE单片机控制,并执行试验;结果表明旋转臂的转动频率趋近于摆杆的转周期则摆杆能到达正负155度以上,能很快地完成设计要求的基本动作,并且能迅速进入PID控制器调控范围,完成坚立状态.[结论]经误差分析表明该装置的稳定性良好,误差范围可控制在正负15度之内;调试结果证明,已实现了倒立摆的平衡控制.【总页数】3页(P9216-9217,9254)【作者】徐泽远【作者单位】东北林业大学机电工程学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】S220.2【相关文献】1.简易旋转倒立摆的双闭环控制设计 [J], 苟军年;汪丽娟;顾桂梅2.简易旋转倒立摆及控制装置设计 [J], 吕昊然3.简易旋转倒立摆及控制装置研究与实现 [J], 张多纳;刘久文;赵政4.基于MSP430F149的模拟旋转倒立摆控制装置设计 [J], 姜锐;胡国珍;龚鼎;江小城;陈旭武5.简易旋转倒立摆及控制装置 [J], 王桔因版权原因,仅展示原文概要,查看原文内容请购买。
简易旋转倒立摆及控制装置
简易旋转倒立摆及控制装置摘要:本文分析了旋转倒立摆的结构和特点,设计了以微控制器为核心的控制系统和算法,整个系统由MC9S12XS128控制单元、电机驱动电路、液晶显示模块、角度传感器模块、速度检测等5个板块组成。
采用VNH3SP30驱动直流电机,该驱动具有内阻小、电流大、且控制简单的特性。
数据采集使用高精度低量程加速倾角传感器。
为使测控系统更精确,在数据采集的过程中采用了非线性误差校正以及数字滤波等数据处理方法,同时设计中考虑到可能存在的各种干扰因素,采用了软硬件结合的抗干扰技术,提高了系统的稳定性。
实际测试表明,所采用的设计方案先进有效,完全达到了设计要求。
关键词:倒立摆;PID控制;陀螺仪;MC9S12XS128目录一系统硬件设计……………………………………………………………….1.1器件的比较与选择……………………………………………………………1.1.1单片机……………………………………………………………………1.1.2电机………………………………………………………………………..1.1.3电机驱动………………………………………………………………….1.1.4角度传感器……………………………………………………………….1.2方案描述……………………………………………………………………..二单元电路的设计…………………………………………………………………..2.1 控制单元………………………………………………………………………..2.2 电机驱动电路…………………………………………………………………..2.3 多路电源电路……………………………………………………………………2.4 传感器电路模块………………………………………………………………….2.5 显示电路…………………………………………………………………………三系统软件设计……………………………………………………………………….3.1系统总的流程图………………………………………………………………….3.2 摆杆直立控制算法………………………………………………………………..3.3 角度单闭环控制算法……………………………………………………………….3.4子程序………………………………………………………………………………..四实现的技术指标………………………………………………………………………….五参考文献………………………………………………………………………………….附录:元器清单一系统硬件设计摆架系统的结构:摆架由支架,旋转臂,摆杆,轴承等构成三角框架,其中为了保证方便控制并有较高的灵敏度,支架采用防震木质材料,旋转臂采用工程塑料碳素杆,摆杆采用圆形铁杆。
倒立摆控制系统的设计与实现
倒立摆控制系统的设计与实现引言倒立摆是一种复杂的机械系统,在工业自动化、机器人学、航空航天等领域都有广泛应用。
如何掌控倒立摆的姿态是一个重要的问题,因此进行控制系统的设计和实现是必不可少的。
本文将介绍倒立摆控制系统的设计和实现。
一、倒立摆系统的组成倒立摆系统是由一个摆杆和一个转轴组成的。
摆杆通过转轴和转动连接到支架上。
倒立摆的底部是一个电机,用于向倒立摆施加力。
二、倒立摆系统的控制原理控制倒立摆的核心原理是反馈控制。
传感器将倒立摆的状态信息反馈给控制器,控制器计算出所需的力矩,然后电机施加所需的力矩将摆杆保持在垂直状态。
三、倒立摆系统的控制器设计1.控制器的类型在倒立摆控制系统中,传统的PID控制器被广泛使用。
此外,还有一些高级控制器,如模糊控制器和神经网络控制器。
2.传感器的选择为了计算正确的力矩,我们需要一个准确的传感器。
我们可以选择陀螺仪、加速度计或角度传感器。
3.控制器参数调整控制器参数调整是控制器设计的关键部分之一。
所选的控制器对系统响应时间、稳态误差和阻尼比等指标具有不同的影响。
通过不断调整控制器的参数,使系统保持稳定并快速响应。
四、倒立摆系统的实现在实际的倒立摆系统中,除了控制器外,还需要编写程序来将传感器数据反馈给控制器,计算力矩并控制电机。
此外,还需要设计电路板和选择适当的电机来控制摆杆的倾斜。
五、倒立摆系统的应用1.教育倒立摆系统可以用于教授物理、控制工程和机器人学等学科的基础知识。
其可视化和实验性质使其非常适合用于学术教学。
2.机器人学倒立摆控制系统在机器人学中得到广泛应用。
它可以用于控制机器人臂的运动,以及控制移动机器人的平衡。
3.摆臂系统倒立摆控制系统还可以用于改进摆臂系统,以控制各种工艺参数。
在重型机器和船舶等领域,通过控制倒立摆的悬挂动态平衡,可以使要处理的物品更加稳定。
结束语倒立摆控制系统是一项极具挑战性的工程。
它可以用于教学、机器人学和工业自动化等领域。
通过正确的传感器和控制器设计,结合适当的电路和机械设计,可以实现快速和精确的摆杆控制,从而取得非常好的结果,并具有广泛的应用前景。
简易旋转倒立摆及控制装置的系统设计

A e k— e k - 1一g k ( 2 )
有信号指示 , 转速可调 , 抗 干扰能力强 , 拥有 过流 保护 , P W M 脉 宽平 滑调 速 , 可 实 现 正反 转 。选 择 增 量式 旋 转编 码 器 , 是 因为 增 量 式旋 转 编 码 器 通 过 内部两个光敏接受管转化其角度码盘的时序和 相位关 系, 得到其角度码盘角度位移量增加( 正方 向) 或减少 ( 负方向) 。在接合单片机后 , 增量式旋 转 编码 器 在角 度测 量 和角 速度测 量 较绝对 式 旋转
AMs 1 1 1 7 — 3 . 3构成 的稳 压 源作 为 电源 。L M7 8 0 5 和 AMS 1 1 1 7 — 3 . 3分别 能 够稳 定 输 出 电压 5 V 和 3 . 3 V, 能够放置 电压过 高烧 毁 电路 , 其输 出电压 刚 好可用于单片机 电路 。电源 电路模块 如图 2 所示 :
收 稿 日期 : 2 0 1 3 - 1 0 一 l 4
基金项 目: 重庆市科委科技攻关重点课题 ( c s t c 2 0 1 2 g g — k p 1 B 0 0 8 9 )
简易旋转倒立摆及控制装 置的系统设计
2 . 2 主控 电路 设计
2 硬件 电路设计
2 . 1 电源 设计 电源 部 分 是 利 用 稳 压 芯 片 L M7 8 O 5 和
简 易 旋 转 倒 立 摆 及 控 制装 置 的 系统 设 计
汪雨 寒 , 夏 洪浩 , 杨 思 亚
( 重庆科技学院 , 重庆 4 0 1 3 3 1 )
摘
要: 采用 A Tme g a 1 2 8作为本旋转倒立摆控 制装 置的主控芯片 , 通过 直流 电机对旋 转臂进行 控
2013年全国大学生电子设计竞赛(C题)
2013年全国大学生电子设计竞赛简易旋转倒立摆及控制装置(C题)2013年9月7日摘要旋转倒立摆是一个非线性、强耦合、多变量和自然不稳定系统。
通过它能有效地反映控制过程中诸如镇定性、鲁棒性、随动性以及跟踪等多种关键问题,是检验各种控制理论的理想模型。
对倒立摆的研究不仅具有深远的理论意义,而且在航天科技和机器人学领域中也有现实指导性意义。
本作品是基于STC89C52单片机作为核心控制器,以L298N作为驱动电路芯片,利用直流电机PWM调速原理,控制旋转臂的转速,从而控制摆杆的频率和振幅,当二者共振时就实现了摆杆在某一固定角度往复运动,能够实现倒立摆的基本功能。
利用加速度传感器获取摆杆的状态,实现摆杆在固定角度摆动,最终实现在竖直方向倒立,即小范围内摆动而不倒下。
关键词:旋转倒立摆,STC89C52,PWM调速,共振目录1系统方案------------------------------------------------ 1 1.1 设计要求 ------------------------------------------1 1.1.1 任务----------------------------------------1 1.1.2 要求----------------------------------------2 1.1.3 说明----------------------------------------2 1.2 总体设计方案---------------------------------------3 1.2.1 设计思路-------------------------------------3 1.2.2 方案论证与比较-------------------------------5 2单元硬件电路设计-----------------------------------------6 2.1 单片机控制系统设计---------------------------------7 2.1.1 STC89C52最小系统-----------------------------6 2.1.2 AD采集模块电路设计---------------------------6 2.1.3 显示模块电路设计-----------------------------7 2.2 加速度传感器的应用---------------------------------7 2.2.1 MMA7361L原理及应用---------------------------7 2.3 电机驱动模块---------------------------------------7 2.3.1 L298N驱动电路设计----------------------------8 3程序结构与设计-------------------------------------------8 3.1 程序流程图-----------------------------------------9 3.1.1 主程序流程图及算法分析-----------------------9 3.1.2 显示程序设计--------------------------------10 4系统测试------------------------------------------------11 4.1 实验摆角测试-------------------------------------114.2 实验结果分析-----------------------------------11 5参考文献----------------------------------------------12 附录1 总程序附录2 电路原理图简易旋转倒立摆及控制装置(C题)【XX组】1系统方案本系统主要由电机驱动模块、显示模块、加速度传感器模块,下面详细介绍各模块的选择与特点。
简易旋转倒立摆及控制装置
简易旋转倒立摆及控制装置Hessen was revised in January 2021简易旋转倒立摆及控制装置(C 题)参赛队员姓名:指导教师姓名参赛队编号:参赛学校:简易旋转倒立摆及控制装置(C 题)摘要:简易旋转倒立摆及控制装置是复杂的高阶闭环控制系统,控制复杂度较高。
系统以飞思卡尔MK10DN512ZVLL10单片机为核心,以Mini1024j编码器为角度传感器,配合直流电机组成旋转倒立摆系统,经过充分的系统建模,并考虑单片机运算速度,最终确定采用改进的“模糊PID”控制算法,通过软件控制,可以满足基本部分要求和发挥部分要求。
系统的突出特点在于充分的力学理论分析,通过力学建模和控制系统仿真,获得了大量的定性分析结果,为系统的建立提供了很好的理论依据。
关键字:倒立摆模糊PID 力学建模状态机一、系统方案1. 系统方案论证与选择倒立摆系统是一个复杂的快速、非线性、多变量、强耦合、自然不稳定的系统。
对于该控制系统而言,合适的控制算法、精确的反馈信号、适合的电机驱动等都对系统的稳定性、控制精度及抗干扰性起重要作用。
针对上述问题,分别设计多种不同的解决方案,并进行选择论证。
(1)控制算法选择方案一:采用传统PID控制算法。
传统PID控制算法是运用反馈求和后的误差信号的比例(0阶位置项)、积分(误差累积项)、微分(1阶速度项)进行系统校正的一种控制算法。
可用于被控对象的结构和参数不能完全掌握,或得不到的精确数学模型的情况,控制器的结构和参数必须依靠经验和反复调试来确定。
方案二:采用模糊PID控制算法模糊PID控制算法根据PID控制器的三个参数与偏差e和偏差的变化ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定。
将模糊控制算法与传统PID控制算法巧妙结合,不但具有PID控制算法精度高等优点,又兼有模糊控制灵活、适应性强的优点。
简易旋转倒立摆及控制装置
第 1 2期
长
春
大
学
学
报
Vo 1 . 23 No .1 2 De c.201 3
2 0 1 3年 1 2月
J 0U RNA L 0F C HA NGC HU N U NI V ER S I T Y
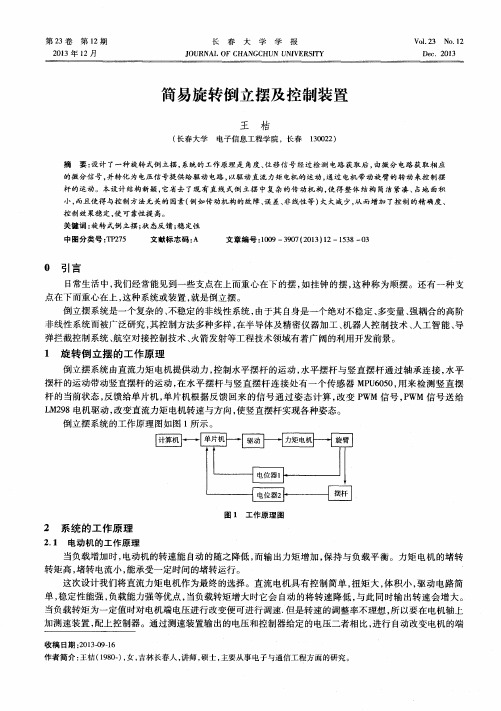
简 易旋 转 倒 立 摆 及 控制 装 置
王 桔
( 长春大学
加测 速装 置 , 配 上控 制器 。通过 测速装 置输 出 的电压 和控 制 器给定 的 电压 二者 相 比 , 进行 自动 改变 电机 的端
收 稿 日期 : 2 0 1 3 - 0 9 — 1 6
作者简介 : 王桔 ( 1 9 8 0 一 ) , 女, 吉林长春人 , 讲师 , 硕士 , 主要从事电子与通信工程方 面的研究 。
驱动 4 6 V、 2 A一 下 的 电机 。
3 . 1 电源 与驱 动 电路
直流力矩电机电压的驱动和控制中, 半导体功率: 器件( L M 2 9 8 ) 在使用上有两种方式 : 即开关驱动方式和 线性放大驱动方式 , 线性放大驱动方式中半导体功率器件工作在线性 区里。在开关驱动方式 中半导体功率
关 键词 : 旋转式倒立摆 ; 状 态反 馈 ; 稳 定性
中图分类号 : T P 2 7 5
文献标志码 : A
文章编号 : 1 0 0 9— 3 9 0 7 ( 2 0 1 3 ) 1 2—1 5 3 8— 0 3
_ ___—_—,一
r— —————’_1
—_-_。一
r—
— —’—1
器 件工 作在 开关 状态 , 电动机 的 电压 用 P WM 来控 制 , 进 而实 现对 电动 机 的转速进 行控 制 。 电动机 的绕 组两 端 的 电压 平均 值 u为 :
湖南人文科技学院简易旋转倒立摆及控制装置

简易旋转倒立摆及控制装置作者:张兵、蒋友才、陈绵壕赛前指导教师:谢四莲、李石林文稿整理辅导老师:谢四莲摘要为了满足旋转倒立摆的控制,本系统采用了STM32微控制器为控制核心,采用模块化的设计方案。
电机驱动模块采用了L298N作为电机驱动芯片,通过PWM波精确控制电机运转。
采用编码器测量旋转角度,能对转轴的旋转作精确测量。
程序设计方面采用了工业过程控制中广泛应用的PID控制器,使系统达到理想的稳态状态。
测试结果表明,旋转臂能够带动摆杆完成题目中的各项要求。
关键词:旋转倒立摆;STM32微控制器;PWM波;编码器AbstractIn the system, STM32 microcontroller is used as the core to control the rotary inverted pendulum with the modular design. L298N, outputting PWM to control the motor precisely, is the motor driver chip in the modular of motor drive and the angle of the rotation axis can be accurately obtained by the angle encoder. In order to enhance the robustness of the system, PID, widely used in industrial process control, is applied in the system. It is shown that the requirements of competition have been done excellently.Keywords: Rotary inverted pendulum ;STM32 microcontrollers; PWM wave; ENC基于STM32微控制器的旋转倒立摆设计1系统方案论证与比较本方案采用双系统模式,由信号采集系统和控制系统组成,两个系统之间由无线模块进行通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简易旋转倒立摆及控制系统的设计与实现摘要系统主要由倒立摆系统的机械结构、数据采集系统、单片机控制系统、电机及其驱动系统和电源系统等五大部分组成。
系统的软硬件设计都采用模块化设计思想。
构建了系统的机械结构部分,包括旋臂、摆杆和步进电机。
详细介绍了传感器电路、单片机最小系统、电机驱动电路、控制电路和外围电路的设计,采用角度传感器SCA60C和模数转换器MCP3221构成了采样及ADC模块电路。
主控芯片采用Silicon公司的C8051F340,根据接收的传感器信号计算控制律,并通过单片机产生控制输出,采用直流电机驱动芯片L298N将控制信号施加于执行电机以控制电机及驱动模块。
在对系统数学模型进行分析的基础上,利用PID控制方法,结合ADC数据采集模块,实现了位置型PID控制算法。
设计中采用软硬件结合的抗干扰技术,提高了系统的可靠性。
最后对系统进行了整体测试,测试结果表明,系统性能能达到题目规定的相关要求,并提出了优化和改进措施。
关键词:旋转倒立摆;PID控制算法;控制系统;单片机1. 系统方案旋转倒立摆的结构如图1所示。
根据题目的设计要求,电动机A固定在支架B上,通过转轴F 驱动旋转臂C旋转。
摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
图1 旋转倒立摆结构示意图旋转式倒立摆的机械结构主要包括旋臂、摆杆、直流电机以及角度传感器部分。
其中直流电机为执行机构,可由专门的电机驱动芯片L298N驱动。
旋臂和摆杆之间由角度传感器连接,摆杆可绕旋臂在垂直平面内转动。
旋臂和摆杆的角位移信号由角度传感器测量得到,作为系统的输入量送入到控制器中,根据一定的算法计算得到控制律并转化为电压信号提供给驱动芯片,来驱动直流电机转动,从而带动旋臂在水平面内旋转,最终实现控制摆杆直立的效果。
旋转倒立摆控制系统结构如图2所示。
在系统中,可通过倾角传感器的反馈获得自由摆末端被控对象的位移,控制驱动模块实时读取传感器反馈的数据,确定控制决策(包括电机的转动方向、转动速度、转动角度等),同时控制模块通过处理器内部的控制算法实现该控制决策,产生相应控制量。
使电机转动,从而带动被控对象运动,达到目标运动状态。
图2 系统结构图为实现各模块功能,提出了几种设计方案并进行论证。
1.1 控制器模块方案一:采用传统的51系列单片机作为系统控制器。
在本设计中,单片机的运算速度越快,运动控制精度越高,所以对单片机的执行速度有较高的要求,考虑到还有AD转换问题,增加了设计和控制难度。
方案二:主控板MCU选择C8051F34X全速USB FLASH微控制器,该微控制器是完全集成的混合信号片上系统型MCU,低功耗,具有较强的处理能力,数字外设和USB控制器,能够适用于多种工业应用场合。
本设计选用该方案。
1.2 控制电机模块方案一:主控制器通过对电机的步进数控制来实现摆杆的运动,设计思想是将单摆运动产生的角度变化转化为电机的步数。
系统单片机只需提供电机转动的方向信号和步进脉冲,硬件连接简单。
优秀的启停和反转响应,易于编程且控制精确。
但在实际测试中发现抖动太大,平滑转动效果不佳,不易于保持摆杆平衡。
方案二:采用直流减速电机来实现精确控制,有较高的平稳性,应用到本系统中将带来更高、更平滑的精度。
因此本系统选用转速较高、扭矩较大的直流电机作为本系统执行机构。
1.3 传感器模块传感器作为检测系统信息的反馈通道,其性能好坏对于整个系统的稳定性具有重要意义。
本系统主要是对倒立摆末端垂直方向倾斜角度的检测,使用单轴倾角传感器。
考虑到检测中物体高速运动的微动方向,要求传感器有较好的灵敏度和响应速度,使用高精度低量程加速度传感器SCA610,直接将其放在平板上就可以检测出平面倾角。
信号调理电路由低通滤波以及运算放大两部分组成。
模数转换使用12位ADC模块,精度较高。
1.4 控制处理模块控制处理模块是平衡控制系统的核心,是实现系统控制的关键环节,它接收倾角传感器反馈的角度数据,并根据给定的PID控制算法计算出控制量,输出后控制电机的转动,维持系统的平衡,同时,监控电机运转情况,通过软件实现最佳位置控制及超速保护等。
1.5 数据传输方案方案一:有线方式交互数据。
主控板要和摆杆末端的传感器、步进电机交互数据,可通过一些工艺和方法用有线方式进行通信,但这种方法处理不好可能会造成对摆杆运动的干扰。
方案二:无线方式传输数据。
利用蓝牙或ZigBee等无线连接方式可实现,优点是特别适合移动物体的通信,但实现较为复杂。
本设计采用方案一。
2. 理论分析与计算2.1 PID控制算法国内外对于倒立摆系统的控制方法主要有PID控制、可拓控制算法、模糊控制算法、神经网络控制算法和遗传算法。
在模拟控制系统中,控制器最常用的控制规律是PID控制。
PID 控制系统原理框图如图3所示。
图3 PID控制原理图本方案中只对系统的旋臂进行控制,通过电机带动旋臂旋转,控制摆杆动作,选取摆杆角度作为反馈信号,PID控制系统图如图4所示。
图4 PID控制系统PID 的控制规律为:公式1 由于单片机控制是一种采样控制,只能根据采样时刻的偏差值来计算控制律,需要对公式1进行离散化处理,经过变换后,在时域中最终采用的方式为公式2。
公式2其中T f为采样频率。
2.2 摆杆状态测量方法摆杆状态测量主要通过两个步骤予以确认。
第一步先采用倾角传感器把相对于基准面的倾角转换为与之对应的电信号输出;第二步,对传感器发出的信号进行AD转换,转换主要使用12位高精度AD完成,然后通过数学公式计算出倾斜角度,可获知摆杆的状态。
本设计采用芬兰VTI生产的高精度低量程加速度传感器SCA610。
需要注意的是,元件类型的倾角仪,需要,将传感器旋转180o,再测出该平面的传感进行校准。
方法是先测出某平面的传感器输出VoutA,计算平均值为零度值。
器输出VoutB2.3 建模与控制方法控制模型如图5所示。
当步进电机启动时,让步进电机的运行频率逐步升高到稳定运行时的工作频率,当步进电机停止时,让步进电机的,运行频率逐步下降直到停止。
如果非常缓慢的升降频,虽不会产生失步和过冲现象,但影响了执行机构的工作效率。
对步进电机的控制有两个基本要求:第一是总步数符合给定值,第二是总的走步时间尽量短。
为了达到上述要求,采用以下方法:建立一种随时校核总步数是否达到给定值的机制,电机每换相一次,都要校核一次。
可通过查表方式,在RAM区中存放给定步数(与角度对应),电机运转后,按脉冲发送数量递减单元中的数值,同时检测单元中的数值是否为零。
为零时说明电机已走完给定的正转或反转总步数,应停止发脉冲,进入锁定状态。
正反转的方向标定由方向控制位决定。
理想的电机起步、停止曲线应为指数规律,这里按直线拟合方式。
图5 倒立摆系统控制模型3.硬件电路设计3.1 最小系统设计最小系统电路是处理器芯片所必需的电路结构,包括电源电路、复位电路、晶振和调试接口。
图6是以C8051F34X为核心的最小系统电路。
图6 最小系统电路3.2 传感器模块设计图7 传感器模块电路为了提高传感器的抗干扰能力,在传感器的电源输入引脚处设置一个100nF的滤波电容,并以低阻抗接到地。
输出信号也通过一个小电容接地保护。
由于传感器的输出电压为0.5V -4.5V,而后续AD输入为0—3V,故在传感器输出后加一分压隔离电路。
采用两个10K的电阻器分压后经运算放大器OPA300跟随输出。
输出端加低通滤波电路减少噪声及干扰。
图7为传感器模块电路。
3.3 电源系统设计单片机系统提供稳定的5V直流电源,电机需要提供12V直流电源,因此必须设计一个独立的电源系统。
基本环节包括降压—整流—滤波—稳压等。
其电路如图8所示。
图8 电源系统3.5 电机驱动设计电机驱动模块采用L298N驱动模块。
输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。
(如果信号端IN1接低电平,IN2接高电平,电机M1反转。
)此外,为了便于控制,采用无线方式操控系统。
其电路图如图9所示。
图9 电机驱动设计4.软件设计系统主程序分为系统初始化模块和控制算法模块。
初始化模块主要对状态寄存器、中断标志、定时器、I/O口等进行设置和初始化。
为控制算法模块程序中采用一个定时器,设置定时时间为 15.625ms,则采样频率Tf64Hz。
当产生定时中断后,置 PID 标志位 PID_flag 为 1。
主程序中判断 PID_flag 为 1 后,即调用 PID 子程序。
PID 子程序中,主要完成比例项、积分项和微分项的计算,根据公式2计算输出控制量 C(n),并调用电机控制子程序。
电机控制子程序中根据 C(n)来控制电机的转向和转动角度大小。
其PID程序流程图如图10所示。
图10 PID子程序流程图在实验过程中,摆杆抖动现象突出,需要采用一定的算法调节,这里借用PID调节的思想,利用微分控制,使其变化的偏差量与偏差的变化速度成正比,微分作用是依据偏差的变化趋势动作的,微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,改善系统的动态性能。
5.测试方案与测试结果先对各个模块进行独立测试,发现均能正常工作,然后搭建实验平台,整体进行测试。
5.1 基本要求一测试摆杆处于自然下垂状态,驱动电机带动旋转臂作往复运动使摆杆摆动,发现在很短时间内摆角超过-60o—+60o。
完成本项要求。
5.2 基本要求二测试摆杆处于自然下垂状态,驱动电机工作,逐步增大了摆杆的摆动幅度,在10s内完成了摆杆的圆周运动。
完成了本项要求。
5.3 基本要求三测试从测试结果分析,系统完成了基本要求,但在控制算法上仍需改进,可避免过大的超调,保证系统的控制精度。
同时,在电机的选型上应使用转速较高、扭矩较大的直流减速电机。
6.结论本系统主要解决了旋转倒立摆的基本控制问题,在科学分析论证的基础上,搭建了完整的系统结构和软硬件平台,并进行了测试,测试结果表明达到了基本要求,但需要对控制算法进行改进。
参考文献:1王志刚.现代电子线路[M].北京:清华大学出版社,2003年10月,第一版.2 江晨.旋转倒立摆的控制算法研究及实验系统设计[D].苏州大学硕士学位论文, 2010年.3 吴秀芹,高国伟,等.倾角传感器自动标定系统的研究[J].传感器与微系统.2009,28:54-55.4 全国大学生电子设计竞赛组委会.全国大学生电子设计竞赛获奖作品选编(2007)[M]。
北京:北京理工大学出版社, 2008年12月, 第一版.5 卢伯英,于海勋,等译. 现代控制系统(第三版)[M]. 北京:电子工业出版社, 2000年5月.6张葛祥,李众立,毕效辉. 倒立摆与自动控制技术研究.西南工学院学报,2001.9。