水面舰艇编队使用拖曳线列阵声纳对潜搜索问题研究
舰载拖曳线列阵声呐对潜定位技术研究及性能分析
舰载拖曳线列阵声呐对潜定位技术研究及性能分析
崔旭涛;何友;杨日杰
【期刊名称】《舰船科学技术》
【年(卷),期】2010(032)004
【摘要】结合舰艇拖曳线列阵声呐实际搜潜装备,利用舰载线列阵声呐测得的潜艇目标方位信息,建立了基于方位量测的舰艇对潜艇目标定位的数学模型;给出求解潜艇运动参数的定位算法,并对定位误差进行了分析.在定位模型及算法的基础上,仿真研究了潜艇与舰艇之间的初始距离、舰艇测得潜艇目标初始方位角、潜艇航向、潜艇航速、航行段总时间内方位角量测次数等因素对定位性能的影响;给出仿真结果并进行了分析.该研究结果对于指导实际反潜具有一定的实用价值.
【总页数】5页(P47-50,72)
【作者】崔旭涛;何友;杨日杰
【作者单位】海军航空工程学院,科研部,山东,烟台,264001;海军航空工程学院,信息融合研究所,山东,烟台,264001;海军航空工程学院,信息融合研究所,山东,烟
台,264001;海军航空工程学院,信息融合研究所,山东,烟台,264001
【正文语种】中文
【中图分类】U666.7
【相关文献】
1.航向传感器应用于拖曳线列阵声呐的性能分析 [J], 龚凯;朱琨;周凯
2.潜用拖曳线列阵声呐的发展及战术使用 [J], 单秉彝
3.惯性传感器应用于拖曳线列阵声呐的试验研究 [J], 李奇峰;余俊华;郭磊磊;吴鹏程
4.拖曳线列阵声呐动态阵形仿真计算研究 [J], 陈小星
5.拖曳线列阵声呐超视距对水面舰艇定位的方法 [J], 叶琼龙; 李大勇
因版权原因,仅展示原文概要,查看原文内容请购买。
国外拖曳线列阵声纳技术现状与发展趋势

国外拖曳线列阵声纳技术现状与发展趋势
拖曳线列阵声纳技术是一种常见的海洋声学探测技术,它可以用于获取海洋中目标的声波信号。
其基本原理是在船舶尾部拖曳一根长达数千米的线缆,线缆上安装着多个声纳阵列,利用声纳阵列接收回波信号并进行处理,以获取目标的位置、形态等信息。
在国外,拖曳线列阵声纳技术已经得到广泛应用,并且得到了持续的发展。
以下是该技术的现状和发展趋势:
1.增强信号处理能力:随着计算机技术的不断发展,拖曳线列阵声纳的信号处理能力越来越强,可以处理更加复杂的信号和海底结构。
2.提高测量精度:拖曳线列阵声纳技术不断提高测量精度,可以实现对海底目标的高精度探测和测量。
3.增加探测深度:通过改进声纳传感器的设计和加强信号处理能力,拖曳线列阵声纳技术可以实现更深层次的海洋探测,可以对更深的海底结构进行观测和研究。
4.多源协同探测:为了提高探测效率和精度,拖曳线列阵声纳技术也开始采用多源协同探测技术,将多个声纳阵列联合使用,实现更加全面、深入的海洋探测。
5.智能化和自主化:随着人工智能技术的发展,拖曳线列阵声纳技术也越来越趋向智能化和自主化,可以实现自
动化的数据采集、处理和分析,提高探测效率和准确性。
总的来说,拖曳线列阵声纳技术在国外已经得到广泛的应用和发展,未来还将继续向更高精度、更深层次、更智能化和自主化的方向发展。
反潜巡逻线中声纳浮标的作战使用与搜潜方法

反潜巡逻线中声纳浮标的作战使用与搜潜方法V o1.36.No.9Sep,201l火力与指挥控制FireControl&CommandControl第36卷第9期2011年9月文章编号:1002—0640(2011)09—0112—03反潜巡逻线中声纳浮标的作战使用与搜潜方法陈庆风,鞠建波,赵明(海军航空工程学院,山东烟台264001)摘要:声纳浮标是一种效果好,受地域限制较小,使用方便的探潜设备,利用声纳浮标阵搜索潜艇需要考虑的因素很多,其中最重要的是发现概率.主要研究了使用声纳浮标在巡逻线搜索时的浮标阵的布设方法和布阵要素,讨论了发现可疑信号后对接触进行识别时的浮标布设模型,并分析了浮标间距对巡逻线搜潜的影响,对作战中布设浮标阵有一定参考意义.关键词:航空搜潜,发现概率,声纳浮标中图分类号:TB566;U666.7文献标识码:A UsingandDetectionMethodsofSonobuoyinSearchingSubmarineatBeatCHENQing—feng,JUJian—bo,ZHAOMing (NavalAeronauticalandAstronauticalUniversity,Yantai264001,China)Abstract:sonobuoyisakindofeffective,littlelimitedwithregionandconvenientequipmenttodetect submarine.Alotoffactorsshouldbeconsideredwhenusingsonobuovbalktosearchsubmarine,themost importantfactorisdetectionprobability.Thispaperresearchesthemethodsandessentialfactorson arrangingBuoy,—Arraywhenusingsonobuoyatbeatanddiscountsthecastingmodelofbuoy—*arraywh ensomesuspicioussignalsweredetected.ThepaperanalysestheinfluenceofBuoy—intervalondetect probability,theseresultsaresignificantforcastingbuoy-arrayatbeat.Keywords:airbornesearchingsubmarine,detectionprobability,sonobuoy引言1浮标的种类与使用时机航空反潜以其快速机动,搜潜效率高,隐蔽安全等特性将在反潜作战中占据最重要的地位,反潜行动包括:搜潜,跟踪和攻击.搜潜是其他活动的基础.为了搜索潜艇,反潜飞机可能使用:声纳浮标,吊放声纳,磁探仪,机载雷达等设备.在众多的搜潜装备中,声纳浮标(以下简称为浮标)具有体积小,搜索面积大,效率高,隐蔽性好,不受海区限制等优点.尤其是远距执行反潜任务时,使用反潜巡逻机携带声纳浮标可迅速到达指定海域完成任务,使其成为航空搜潜的主要装备.收稿日期:2010—05—17修回日期:2010—08—29作者简介:陈庆风(1986一),男,河南信阳人,硕士,研究方向:水声工程.声纳浮标根据工作频率,可分为:声频,次声频.根据定向方法和范围分为:被动全向,被动定向,主动全向,主动定向等4种.主动定向声纳浮标作用距离较小而且不隐蔽,但其定位精度高,定位速度快,因此多用于攻击前的快速精确定位,也可用于应召搜索距离近位置较明确的潜艇[1].被动浮标相对主动浮标造价低,隐蔽性好,是一种布设方便,搜索范围大,搜索效率高的搜潜装备,是目前作战使用的主要浮标种类,此外还有温深,海洋噪声等辅助性浮标主要用在布设搜索浮标阵前海洋环境的探测为设定搜索浮标阵的作战参数提供依据.2海洋环境对浮标使用的影响声纳浮标听测水下目标的距离取决于浮标种类,水文条件,海况,水下目标航行速度,下潜深度和噪声,及浮标的灵敏度,目前浮标仅能在五级海况下陈庆风,等:反潜巡逻线中声纳浮标的作战使用与搜潜方法(总第36—1729)?113? 使用瞳],在实际使用浮标搜潜时,为了保证浮标的水听器达到最佳的探测深度和修正海洋噪声对搜潜效果的影响,应首先布设一枚温深浮标,接着布设一枚海洋噪声浮标,机组人员根据浮标返回的数据绘制出海水温度深度曲线,同时根据海洋噪声浮标数据确定海区海洋噪声等级.根据声纳方程:主动:2TL—SL一Ⅳ—DT—DI+TS(1)被动:71£=SL1一ⅣL—D+DI(2)L为潜艇辐射噪声的声源级;ⅣL为海洋环境噪声级;DI为浮标的接收机方向性指数;DT为浮标的检测阈;丁为声传播损失.海洋环境主要影响的是丁和ⅣL这两个参数,ⅣL可由海洋噪声浮标数据确定,而L则因海洋声道,声源深度,季节的不同而变化.在典型的浅海声道中,声传播和声场依赖于海面,海水介质和海底的许多物理参数,在对这些参数不甚了解的情况下,只能近似地估计浅海的传播损失.March&Schlkin根据对海区的现场测量结果,提供了一组便于使用的半经验公式[3]:在距声源rkm处的传播损失为:丁L一10log(r)+口r+aT(r/D一1)+10log(D)+64.5一L(3)式中,a是海水吸收系数,其表达式为:口一0.1/(1+尸)+2.75×10尸+4O/(4100+)+0.03,D一(H/3+)(4)Ⅳ表示水深;L表示混合层深度;fiT为浅海有效衰减系数;K是近场异常衰减,单位为dB,对于不同的海况和海底类型,对应不同的传播频率,K的值均不同.3声纳浮标的使用方法巡逻线搜索——反潜航空兵在带状海域实施的搜索,该海域垂直于已查明的或预计的敌潜艇航线, 该方法假设敌潜艇通过该海域任一点是可能的.通常布设声纳浮标线形阵,浮标阵中浮标的数量和相邻浮标之间的间隔取决于要求的发现敌潜艇的概率,声纳浮标发现敌潜艇的距离和搜索条件,布设和监听浮标有:同时法和顺序法.本文主要介绍同时法.3.1采用同时法布设和监听浮标阵根据浮标阵的长度,与机场之间的距离,预计完成任务的时间和气象条件,布设浮标的方法分为:所有同时法(图1),分散航向法(图2),鱼贯法(图3),接力法(图4).——战术群沿同一航向同时布设所有浮标段,该方法的优点:布设浮标阵的时间等于布设一段浮标的时间,能够避免直升机的碰撞,能够正确区分发现可疑目标而发出信号的浮标.,,,’\弋}/图1所有同时法——战术群沿相反航向同时布设浮标阵,通常采用两架飞机,优点同上且组织简单.幻?5~mzdf图2分散航向法——战术群组成密集战斗队形,沿同一航向依次布设浮标阵,机群飞往浮标阵的开始布设点,直升机从该点依次布设浮标阵的一段,每架直升机布设完浮标后返回浮标段中点监听.该方法的优点是布设和组织简单,缺点是布设时间长,等于各架直升机布设时间之和.)[]>∞图3鱼贯法——战术群组成疏散战斗队形,沿同一航向依次布设浮标阵,直升机依次飞至指定浮标段的开始点,相邻直升机布设浮标的时间间隔等于前架直升机布设浮标所用时间.该方法的优点是最佳利用了直升机的飞行时间,不足是布设浮标阵的时间长.图4接力法3.2浮标阵的布设要素确定浮标阵通常是分段布设的,浮标段的长度不超过飞机一浮标之间的通信距离D通信,为了减小飞机的飞行强度,可以适当增加浮标段长度,最大长度必须满足:在直升机未能监听时间内,潜艇不能通过浮标探测区.浮标段长度公式如下:L~ea=J[)通信+(5)式中:浮标为浮标发现潜艇的距离,m为直升机与潜艇的速度之比,R机为飞机的旋回半径.▲●9÷+oo?114?(总第36--1730)火力与指挥控制201i年第9期布设完浮标后,每架直升机飞至浮标段的中央,以便监听浮标段,监听的飞行方式有长方形飞行监听和交叉飞行监听,飞行的方向可以平行于浮标段也可以垂直于浮标段.见图5.——平行浮标段飞行时飞行段长度:L飞行段一L浮标段一(1.7浮标×一nRe)(6)——垂直浮标段飞行时飞行段长度:飞行段一√D信一0.25L~um(7)T几霪雠金.—:图5平行飞行段长方形监听和垂直飞行段交叉监听3.3对接触进行识别当一枚或数枚相邻浮标发出信号时机组人员应该立即对接触进行识别,可以布设补充浮标或借助其他器材(如磁探仪,吊声等).在这里只讨论布设补充浮标的方式,补投的浮标可以是主动浮标或被动浮标,主动定向声纳浮标作用距离较小而且不隐蔽会使潜艇发觉自己已经暴露,而采取一系列规避机动,但其定位精度高,定位速度快,因此多用于攻击前的快速精确定位,而被动多用于对潜艇攻击前连续跟踪以搜集更多潜艇的运动信息,具体采用哪种浮标需根据战场实际情况来决定.直升机飞向发出信号的浮标时,如果该浮标还在发出信号,可以采用十字型或三角型浮标阵,如果该浮标未发出信号则应采用包围型浮标阵.l_5:fiIfII??f互t图6十字型,三角型与包围型浮标阵如果补投浮标阵中的浮标未发出信号,可认为预计的潜艇航速低于潜艇实际航速,或实际滞后时间大于计算值,或布设浮标的误差过大.此时,应根据敌潜艇可能的散布位置再布设一道包围型浮标阵,如果浮标阵中浮标发出信号,机组人员应通过浮标测量潜艇位置,运动要素,结束识别过程转入攻击或跟踪过程.3.4巡逻线搜潜效率分析在巡逻线用浮标搜索潜艇的效率由发现潜艇的概率表示,它由下式计算[2]:P一2(i_,d)pP+[1一(1一PP)z](8)式中:i为浮标之间的间隔;d为浮标探测潜艇的距离,P为浮标技术完好率,P为机组人员对接触识别的概率.在实际使用中特定浮标的探测距离和技术完好率通常是确定的,机组人员的识别概率在一定技术条件下也是变化不大的,关于探测概率, 讨论如下:fP一(2一PP)PP,i—dlP一0.67PP+o.33[-1一(1一PP).],i一1.5d P—PP,i一2d1P一P尸,>24L理论和实践都证明,P和P,的取值范围通常在0.7~O.9之间引,取P一0.8和P一0.8计算出i与d在上述几种关系下的发现概率,见表1.表1几种典型条件下的发现概率,dP(户一0.8,P一0.8)i—时0.87i一1.5d时0.72一2d时0.64>2d时<O.64通过上述计算和图表可以看出声纳浮标的搜潜科概率与浮标布设间隔及浮鬈标的探测距离紧密相关.当i—d时探测概率最大,浮标探测距离一定时,不同的浮标布设间隔其发图7概率也不相同,随着浮标布设间隔的增大,发现概率逐渐减小.4结论本文介绍了浮标的种类及其使用时机,海洋环境对浮标使用的影响,较为详细地讨论了浮标在巡逻线作战使用方法,并对浮标搜潜效能进行分析,为作战中更好地使用声纳浮标,提高搜潜概率,提供了一定指导.参考文献:il1]王德石,WaiteAD.实用声纳工程[M].北京:电子工业出版社,2004.E2]纪金耀.俄罗斯海军反潜战术[M].北京:海军司令部军训部,2001.[3]UriekR.PrinciplesofUnderwaterS0und[c]//3rd ed.NewYork:McGRAW—Hill,1983.[4]丁松林,闫国玉.反潜巡逻线搜索中声纳浮标发现概率的定量评估[J].舰船电子对抗,2005:28(5): 38—40.。
水面舰艇编队拖曳声纳舰阵位配置及行动方法
水面舰艇编队拖曳声纳舰阵位配置及行动方法沈治河;贺扬清;刘峰【期刊名称】《计算机仿真》【年(卷),期】2012(29)3【摘要】By developing of submarine technology, the threat constituting by submarine to surface force formation becomes more and more serious. The towed sonar warship is main anti-submarine force. The position and action of towed sonar warship are very important for the surface force formation. In this paper, a method of position-defining of towed sonar warship for the surface force formation in navigation was suggested. After analyzing the anti-submarine areas, the principles of determining the position of towed sonar warship were proposed, and the corresponding mathe matical models were established. The influence of the parameters on the position of towed sonar warship was analyzed by simulations calculation, and the escort action of towed sonar warship is advanced. The work can be used for war ship commander to make correct decision.%研究水面舰艇编队优化问题,由于潜艇对水面舰艇编队构成严重威胁,为有效保护舰艇安全,选择声纳舰的位置十分重要.拖曳声纳舰作为水面舰艇编队主要对潜警戒信号,对阵位配置及行动方法对编队的反潜效能影响巨大.针对水面舰艇编队航渡中近程拖曳声纳舰的阵位配置问题,提出了一种方法.通过对舰艇编队反潜警戒区的划分,总结了拖曳声纳舰阵位配置原则,建立了关于拖曳声纳舰阵位的模型,仿真计算了各种参数对拖曳声纳舰阵位的影响,并提出了拖曳声纳舰“蛙跳”行动的方法,并进行仿真.结果表明,方法有效,为指挥员编队决策提供了参考依据.【总页数】4页(P49-52)【作者】沈治河;贺扬清;刘峰【作者单位】海军大连舰艇学院,辽宁大连116018;海军大连舰艇学院,辽宁大连116018;海军大连舰艇学院,辽宁大连116018【正文语种】中文【中图分类】E925【相关文献】1.航母编队防空哨戒舰阵位配置方法 [J], 朴成日;沈治河2.水面舰艇编队使用拖曳线列阵声纳对潜搜索问题研究 [J], 丁红岩;董晓明3.大型水面舰艇编队航渡中直接反潜警戒舰阵位仿真研究 [J], 贺扬清;沈治河;刘峰4.航母编队反潜声纳舰阵位确定方法研究 [J], 赵小龙;吴晓锋;徐圣良5.航母编队防空哨舰阵位配置方法仿真研究 [J], 吴晶; 麻旻; 吴艳杰因版权原因,仅展示原文概要,查看原文内容请购买。
拖线阵声纳探测技术研究现状及发展趋势
拖线阵声纳探测技术研究现状及发展趋势Current Status and Development Trend of Detection Technology of Towed Linear Array Sonar徐雅倩X U Y a-q i a n;郭高峰G U O G a o-f e n g;刘方正L I U F a n g-z h e n g(海军装备部装备采购中心,北京100071)(N a v a l A rm am ents D epartm ent E q u ip m e n t P rocurem ent C e n te r,B e ijin g 100071,C h in a)摘要:对水面/下目标探测的需求促进了拖线阵声纳探测技术的发展,拖线阵声纳探测技术的快速发展,使其成为现代水面/下目标探测、反潜战中不可或缺的技术。
因此,由必要追踪了解拖线阵纳探测技术中水听器技术、成阵技术、信号处理技术的研究现状,并从流噪声抑制、信号处理技术、多平台协同探测方面预测拖线阵声纳探测技术的发展趋势。
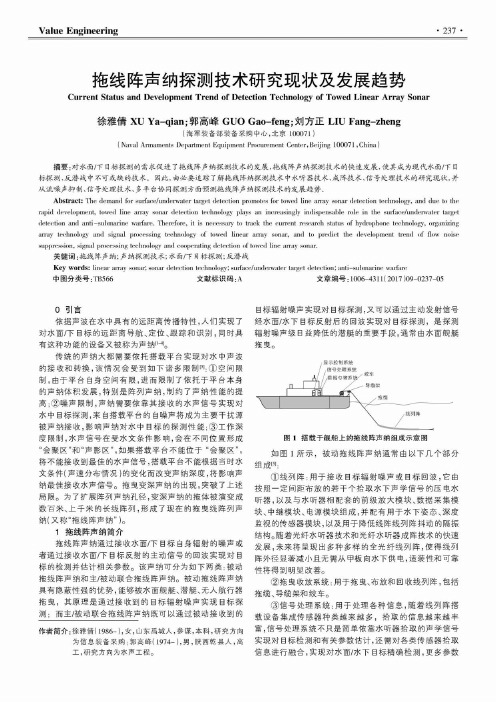
A b s tr a c t:The dem and fo r surface/under^vater target de tection prom otes fo r towed lin e array sonar de tection tech nolog y,and due to the ra p id de velopm ent,towed lin e array sonar d e tection technology plays an in cre a sin g ly indisp ensa ble ro le in the surface/under^vater target de tection and a n ti-s u b m a rin e w arfare.Th ere fore,it is necessary to tra ck the cu rre n t research status o f hydrophone tech nolog y,organizing array technology and signa l processing technology o f towed lin e a r array sonar,and to p re d ic t the de velopm ent tre nd o f flo w noise suppression,signal processing technology and cooperating d e tection o f towed lin e array sonar.关键词院拖线阵声纳;声纳探测技术;水面/下目标探测;反潜战K e y w o r d s:lin e a r array sonar;sonar d e tection te ch n o lo g y;surface/under^vater target d e te c tio n;a n ti-s u b m a rin e w arfare中图分类号:T B566 文献标识码:A0引言依据声波在水中具有的远距离传播特性,人们实现了 对水面/下目标的远距离导航、定位、跟踪和识别,同时具 有这种功能的设备又被称为声纳[14]。
应召平行搜索方法的多舰协同搜潜概率
ds a c ewe n t ep sto f hp s a c u u u lu n h t f u ma i efn l o n it n eb t e h o iino i e r h q e eb i p a dt a b rn ial fu d,t er too s d o s y h a i f
及 航 速 未 知 的 条 件 下 , 艘 舰 艇 利 用 拖 曳 线 列 阵 声 纳 对 潜 艇 目标 进 行 搜 索 的数 学 模 型 , 用 蒙特 卡 罗 方 法 仿 真 分 析 了舰 艇 与 多 采
潜艇最大速度 比值 , 艇组成搜 索队形位置点 与最后发 现 潜艇位置 点之 阅的距离 , 舰 舰艇之 间间距 与舰艇声 纳作用距 离的 比
艇协 同搜潜 , 以提高对 潜艇 目标 的搜 索效能 口 ] 。
大 的作 战 半径 , 在 较 大范 围 的海 域 长 时 间对潜 艇 能 实 施搜 索 和跟 踪 的特 点 , 反潜 作 战 中扮 演 着重 要 在
的角 色 。同时拖 曳式 线列 阵声 纳 系统在舰 艇上 的使
V0I 5, . .3 No 8
Au , 0 0 g 2 1
火 力 与 指 挥 控 制
FieCo to r n rl& Co mma d Co to n nrl
第 3 5卷 第 8 期 21 0 0年 8月
文章编 号 :0 20 4 (O O 0— 090 1 0= 6 02 L )80 2 —3
值 , 最 后 发 现 潜 艇 时 刻 到 舰 艇 开 始 搜 索 时 刻 所 需 时 间 等 因素 对 搜 潜 概 率 的影 响 , 得 了 有益 的 效 果 。 及 获
关键词 : 同搜潜 , 协 概率 , 纳 声
声波在水中的传播特性和水中目标探测的研究

声波在水中的传播特性和水中目标探测的研究摘要:1912年4月19日,英国刚刚研制成功的一艘14000吨级的新邮轮“巨人号”,在加拿大纽芬兰岛南部海域被一座浮动冰山撞沉。
结果1500余人遇难。
在第一次世界大战期间,德国人利用新发明的U型潜艇,击沉了大量协约国的军舰和商船。
两件重大事件促使科学家、发明家对声纳的研制和改进加快了进程。
声纳的用途十分广泛。
在军舰、潜艇、反潜飞机上安装声纳之后,可以准确确定敌方舰艇、鱼雷和水雷的方位。
同时,它还能区别前方的目标是鲸鱼还是潜艇,是敌方潜艇还是我方潜艇呢。
在民用方面,可以使轮船在黑夜和雾天航行时及时发现前方的船只或暗礁;可以告诉渔民哪儿有鱼群;还可以用来研究海洋地质,搜寻海下沉船,进行水下通信联系等等。
关键词:声纳组成和工作原理简史现状发展趋势英文翻译:Acoustic wave propagation in the water and the water target detection researchName: Liu Yi Yao Tian Units: College of Nanjing University of Technology and Engineering ZijinAbstract:April 19, 1912, the United Kingdom has just been successfully developed a new 14,000-ton cruise "giant" in the southern island of Newfoundland, Canada, was a sea of floating iceberg sank. Results More than 1,500 people died. During the First World War, the German use of the new invention of the U-shaped submarine to sink a lot of Xiediguo warships and merchant ships. Two major events prompted scientists, inventors of the sonar in the development and expedite the process of improving. Sonar uses very wide-ranging. In warships, submarines, anti-submarine sonar installed on the aircraft, can be accurately determined enemy ships, torpedoes and mines position. At the same time, it can also distinguish between the target is a whale in front of the submarine or is our enemy submarines or submarine it. In the civil context, will enable vessels navigating in the darkness and fog at the time found in front of the vessel or reefs; can tell fishermen where there are fish, but also can be used to study the marine geology and search under the sea shipwrecks, underwater communication links etc..Key words: sonar composition and working principle history Status Quo Development Trend正文:作为弹性波的声波在水中传播具有损耗小、传播距离较远的优点,所以声纳已成为海洋开发和研究中不可缺少和行之有效的探测设备.但根据海洋声学的基本特性,海水中声波的传播速度受海水的温度、盐度和水压等环境因素影响较大,这对声纳探测,特别是测深的影响非常大,它直接改变海水中声波传播轨迹:声速变化为正梯度时,水下声源发出的声线向海面弯曲;声速变化为负梯度时,声线向海底方向弯曲。
驱护舰编队使用拖曳声纳反潜的队形配置
编 队 队形 配 置 应 适 应 各 舰 装 备 的 指 控 系统 和 通 信 能力 的需要 , 保 障编 队指挥 舰 与各 舰 之 问通 信
是 现代 反潜 作 战 中的重 要 探 潜 手 段 。由 于拖 曳声 纳 是 以被动 工作方 式 工作 的 , 在 编 队 中其 它舰 艇产
Vo 1 . 3 5 No . 2
46
舰 船 电 子 工 程
S h i p El e c t r o n i c En g i n e e r i n g
Байду номын сангаас
总第 2 4 8 期 2 0 1 5年第 2 期
驱 护 舰 编 队使 用 拖 曳 声 纳 反 潜 的 队 形 配 置
台, 扩 大 了直 升 机 的反 潜 范 围 ; 同 时直 升机 又 扩 大 了水 面舰艇 的反潜 范 围 , 增 强 了快 速反 应 能力 。
拖 曳声纳 是 指用 拖 曳 电缆 将 声 纳 基 阵拖 曳 在
运 载体 尾后 水 中探 测 目标 的声 纳 。舰 艇 携 带 拖 曳 声纳 , 具 有探 测距 离远 , 受本 舰 噪声 干扰 小 等优 点 ,
动 等诸 多 内容在一 起 的复杂 作 战过 程 , 编 队 队形优 化 配置 的 目的是 最 大 限度 地保 障 武器 装备 作 战效 能 的发 挥 , 发挥 现有 装 备 作 战性 能 , 增 强 编 队综 合 作 战 能力 。针对 反潜 作战 , 编 队 队形 配 置 应遵 循 以
下 原则 _ 1 J 。 1 )便 于编 队指挥 、 协 同
郭传 福 王 洪胜 曲延 明
大连 1 1 6 0 1 8 ) ( 海 军大连舰 艇学 院舰 船指挥系
摘 要
拖曳线列阵声呐及其左右舷分辨方法初探

拖曳线列阵声呐及其左右舷分辨方法初探作者:梁峰来源:《中国科技纵横》2017年第13期摘要:在反潜战中,拖曳线列阵声呐将发挥重要作用。
基于这种认识,本文对拖曳线列阵声呐的概念、发展情况和几种典型的声呐进行了分析,然后对影响其性能的左右舷分辨方法展开了探究,从而为关注这一话题的人们提供参考。
关键词:拖曳线列阵声呐;左右舷;分辨方法中图分类号:U666.7 文献标识码:A 文章编号:1671-2064(2017)13-0064-01在水下探测技术研究方面,拖曳线列阵声呐的研究得到了诸多国家的重视。
就目前来看,该种声呐已经能够在水面舰艇、潜艇等海军船只上得到了广泛应用。
而想要使拖曳线列阵声呐的性能得到进一步提高,还要使用更加科学的左右舷分辨方法,以加强对水下目标的跟踪探测。
1 拖曳线列阵声呐概述所谓的拖曳线列阵声呐,其实就是通过将水听器在电缆上布置成线列阵,然后通过拖拽电缆完成水中目标探测的一种声呐。
利用该种声呐,可进行潜艇辐射噪声的听测,也能完成远程监视、识别和测向。
最早,人们将该种声呐安装在警戒船上,后来则将其改进并安装在水面舰艇上。
随着该技术的发展,该种声呐被广泛应用在核潜艇和水面舰艇上,主要用于进行水下环境的远距离监视,是一种被动的探测技术。
直至冷战结束,海军作战区转向大陆沿岸浅海地区,该种声呐也开始用于进行主/被动联合探测[1]。
从总体上来看,左右舷分辨方法是拖曳线列阵声呐的关键技术指标,将对该种声呐的使用产生重要影响。
2 拖曳线列阵声呐的左右舷分辨方法的探究2.1 传统左右舷分辨方法在过去的拖曳线列阵声呐基阵中,采用的是无指向性的水听器。
针对水平入射的信号,则要以基阵为轴向对称进行等强度镜像目标的分辨。
如果无法进行左右舷的分辨,声呐就会出现左右舷模糊的问题。
采用传统的分辨方法,需要使本艇完成一次转向机动,从而使单线阵根据目标方位变化进行分辨。
但该种方法的采用,无法进行目标的实时分辨。
因为在机动的过程中,还会出现单线阵发生畸变的问题,继而导致波束无法及时形成。
海洋拖曳系统控制技术研究探讨
海洋拖曳系统控制技术研究探讨摘要:本文概括了拖体控制技术、拖缆缆形优化技术等关键控制技术,并对海洋拖曳系统未来的研究方向进行了展望。
为我国海洋拖曳系统的控制技术研究提供了有益的参考。
关键词:海洋拖曳系统;控制技术;综述0 引言海洋拖曳系统作为一种高效的海洋探测平台,随着海洋开发的日益深入,已广泛地被应用于海洋研究、海洋监测、军事探测、水声对抗等诸多领域,并发挥着越来越重要的作用。
通常,海洋拖曳系统由拖体、拖缆和专用绞车等设备组成,拖体内部可搭载温度、盐、压、营养盐及声纳等各种海洋化学元素探测传感器或声、光等物理探测传感器,为现代多种海洋活动提供了难以替代的技术途径与装备保障。
鉴于此,海洋拖曳系统的相关研究成为了现代海洋开发与应用的重要课题之一。
目前,拖曳系统控制的基本思路为安装一定的控制机构,配合使用与之相适应的控制理论及算法,实现海洋拖曳系统的有效控制。
本文将在概括分析了实现系统控制采用的关键技术,并对未来的研究方向进行初步展望。
研究结果将对发展我国的海洋拖曳系统,提高我国海洋开发能力具有一定的参考价值。
1拖体控制技术研究目前,海洋拖曳系统的拖体控制技术主要包括两类: 一是主动控制技术,二是非主动控制技术。
主动控制技术是指系统配置各种先进的控制设备,以控制和调整系统的工作性能; 非主动控制技术是指拖体无主动控制机构,系统深度取决于拖体的重量或安装的固定水翼,当拖曳速度和拖缆长度给定时,系统将具有恒定的深度。
相比两种控制技术而言,主动控制技术具有更好的调节性能,具有更广阔的应用空间,因此也是研究重点。
实现拖体主动控制的主要途径可分为两类: 一是安装水平控制水翼,实现对拖体深度及其俯仰的控制; 二是通过同时对垂直控制水翼和水平控制水翼的调节,实现拖体深度、俯仰、偏航以及侧向位置的控制。
这两种技术途径的共同点,即调节攻角可控制的水翼,产生足够的迫沉力、侧向力,从实现对拖体深度或姿态的控制。
研究表明,相比于拖体俯仰姿态控制而言,保证其横滚稳定性的技术手段相对简单,通过合理设置拖体浮心的位置和配载合适的阻尼力,便可实现。
登陆海域水面舰艇对潜警戒能力分析
式中,S1 max 为水面舰艇反潜警戒线的最大有效长
度;d t 为水面舰艇拖曳声纳战术作用距离;V j 为水
æ Vq ö
β = arcsin ç ÷
è Vj ø
面舰艇在巡逻线上的平均航速;V q 为敌潜艇穿越
则此时水面舰艇的对潜警戒能力计算模型为
巡逻警戒线时的突防速度。
远距离导弹攻击的威胁,水区警戒兵力需要前出配
置的距离远,所需防御的范围大。因而,水区警戒
图1
具有保护目标多、防御范围广的基本特征。
2)威胁多元,防御任务重
水面舰艇往返巡逻搜索示意图
设某时刻水面舰艇使用拖曳声呐沿指定的巡
在登陆海域作战阶段,敌可能使用潜艇、水面
逻线 AB 作往返搜索运动,敌潜艇以垂直于巡逻线
陆舰船提供的反潜警戒线最大有效长度来表征
。
水面舰艇使用拖曳声呐建立拦阻巡逻线实施
水区对潜警戒时,通常采用往返巡逻搜索法和“8”
字型巡逻搜索法两种战术行动方法[5,13]。
1)往返巡逻搜索时反潜警戒线最大有效长度
计算模型
往返巡逻搜索,是指水面舰艇在指定的巡逻警
戒线上进行往返运动的搜索方式。如图 1 所示[6]。
S 2 max =
设 n=
2V j d t cos θ V j 2 - V q 2
V jV q + V q 2
+ 2d t
(13)
Vj
,则可将水面舰艇“8”字型巡逻搜索
Vq
的反潜警戒线最大有效长度计算模型简化为
2021 年第 6 期
147
舰 船 电 子 工 程
æ n n2 - 1
ö
S 2 = 2çç
基于线列阵声纳的水面舰艇检查搜潜仿真
难 以胜任 反潜作 战任务 。 因此 , 运用 先进 的计 算 机技 术 和现代 决策理论 研究 影响 水面舰 艇检查搜 潜 的 主
要 因素 , 出 的结论 对 提高 水 面舰 艇搜 潜 效 能 和为 得 指挥 员提供 有效 的作 战方案 , 有重 要的现 实 意义 。 具
1 水 面 舰 艇 搜 潜模 型 研 究
1 1 单舰 检查搜 潜模 型研 究 .
潜作 战更 加 困难 和 复杂 。与 反潜潜 艇和 反潜 直升机
等 兵 力 相 比, 面舰 艇 具 有 作 战半 径 长 、 航 能力 水 续
检 查搜 索方 法通 常是 在不 掌握潜 艇位 置和运 动
强、 耐波 性好 、 有完 备的数 据处理 系统 和持续 攻击 具 能力、 可装 备 多种搜潜 设备 和攻潜 武器 等特点 , 是平 时 ( 战时 ) 或 使用 最 多的武器 装备 之一 。正是 由于水
基 于线 列 阵声 纳 的水 面 舰艇 检 查 搜 潜仿 真
王 磊, 吴福初 , 崔旭 涛
烟台 240) 6 0 1 ( 军航空工程学院 , 海 山东
摘
要 , 面舰艇检查搜潜是其搜潜 的主要方 式之一 。在分 析潜艇运动模 型和检查搜潜模型 的基 础上 。 水 对仿真环境进 行
假设 , 建立单 舰检查搜潜蒙特卡洛法模 型, 并 通过仿 真试验对 其在一定 条件 下检查搜潜效 能进行研究 , 出的相关结论对提 得 高水面舰艇反潜作 战运用水平具有较大的实际应用价值。 关t词 水面舰艇 , 检查搜潜 , 仿真研究
矩 形检 查搜 索方法 是 指舰艇 采用 直线路 径 由初 始 搜 索点 ( 常 为矩 形 搜索 区域 的顶 点 ) 始 , 返 通 开 往 搜 索 , 至搜 索完 整个 搜索 区域 。 直 根据 线列 阵声纳 有
水面舰艇与反潜巡逻机协同检查搜潜队形配置研究

第44卷第2期2022年4月指挥控制与仿真CommandControl&SimulationVol 44㊀No 2Apr 2022文章编号:1673⁃3819(2022)02⁃0033⁃05水面舰艇与反潜巡逻机协同检查搜潜队形配置研究唐㊀晨,孙秀文,吴㊀刚(海军指挥学院,江苏南京㊀210016)摘㊀要:已有文献中对水面舰艇与反潜巡逻机协同检查搜潜队形配置缺乏理论证明㊂运用相对运动原理和数学方法,对水面舰艇与反潜巡逻机协同检查搜潜队形配置进行建模分析,给出了详细的理论推导和计算公式,并仿真验证了其可行性㊂研究结果可为舰机协同检查搜潜提供理论参考㊂关键词:水面舰艇;反潜巡逻机;声呐浮标;检查搜潜;队形配置中图分类号:E273 1;E843㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2022.02.007ResearchonFormationDeploymentsofCoordinatedSearchforSubmarinesbyNavalShipsandAnti⁃subPatrolAircraftsTANGChen,SUNXiu⁃wen,WUGang(NavalCommandCollege,Nanjing210016,China)Abstract:Thereisnotheoreticalsupportforthecalculationofformationdeploymentsofcoordinatedsearchforsubmarinesbynavalshipsandanti⁃subpatrolaircraftsintheexistingliterature.Inthispaper,inlightofthetheoryofrelativemovementandmathematics,theformationdeploymentsaremodeled,thedetailedtheoreticalderivationandcalculationformulasaregiven.Thefeasibilityofthemodelisalsosimulatedandanalyzed.Theresearchresultscanbeusedasreferencetothecoordi⁃natedsearchforsubmarinesbynavalshipsandanti⁃subpatrolaircrafts.Keywords:navalships;anti⁃submarinepatrolaircraft;sonarbuoy;searchforsubmarines;formationdeployment收稿日期:2021⁃09⁃14修回日期:2021⁃10⁃21作者简介:唐㊀晨(1986 ),男,硕士研究生,讲师,研究方向为合同战术㊂孙秀文(1985 ),男,硕士研究生,助教㊂㊀㊀搜潜是反潜作战的重要前提[1]㊂随着潜艇降噪㊁规避搜潜等方面技术的发展,搜索发现潜艇变得更加困难[2]㊂舰机协同检查搜潜,由于可以实现兵力优势互补㊁提高搜索发现效能,在检查搜潜中运用较为普遍㊂水面舰艇与反潜巡逻机协同检查搜潜是一种常见的搜潜编组形式,主要在搜索海域范围广㊁潜艇存在可能性大㊁搜索时间比较长时使用[3⁃4]㊂其中,水面舰艇主要使用舰壳声呐㊁拖曳线列阵声呐等装备搜潜[4];反潜巡逻机主要使用声呐浮标㊁磁探仪等装备搜潜[5]㊂检查搜潜的目的是搜索发现指定海域中的潜艇,或是将指定海域搜扫干净,尽可能地排除里面的潜艇㊂对水面舰艇与反潜巡逻机协同检查搜潜问题进行建模分析,得出较优化的队形配置,对搜潜实践具有一定的理论指导意义㊂受篇幅所限,这里研究讨论水面舰艇使用舰壳声呐与反潜巡逻机布设声呐浮标协同检查搜潜的队形配置㊂1㊀水面舰艇与反潜巡逻机协同检查搜潜的一种队形㊀㊀水面舰艇与反潜巡逻机协同检查搜潜时,水面舰艇位于搜索带一端,采用单横队直航向机动搜索潜艇[1];反潜巡逻机在搜索带的两侧布设声呐浮标阵,以发现低速向搜索带两侧规避的潜艇[3],如图1所示㊂这里的队形,实际上是指水面舰艇与反潜巡逻机布设的声呐浮标阵的队形㊂图1㊀队形示意图2㊀水面舰艇与反潜巡逻机协同检查搜潜队形建模分析㊀㊀不妨假设在宽为B㊁长为L的搜索带内,可能存在某潜艇㊂上级计划派遣水面舰艇与反潜巡逻机实施协同检查搜潜,现需要配置协同检查搜潜队形㊂要确定搜潜队形,主要需要解决两个大问题:一是水面舰艇的队形和位置点;二是声呐浮标的阵形和位置点㊂34㊀唐㊀晨,等:水面舰艇与反潜巡逻机协同检查搜潜队形配置研究第44卷2 1㊀水面舰艇的队形和位置点为建模方便,设定为同型舰艇㊂水面舰艇位于搜索带的一端,采用单横队搜索,其声呐作用区的宽度至少要覆盖搜索带的宽度,如图2所示㊂因此,水面舰艇的队形宽度为Bdx=B-2djs(1)式中:Bdx为水面舰艇的队形宽度;djs为水面舰艇声呐的作用距离㊂图2㊀水面舰艇队形示意图由已有文献[6]可知,相邻舰艇声呐作用区应有一定的重叠,以有效防止潜艇从水面舰艇之间区域逃脱㊂如图3所示,水面舰艇的队形宽度[6]为Bdx=(n-1)kdjs(2)式中,n为水面舰艇的数量;k为间隔系数,通常kɪ[1,2]㊂由(1)㊁(2)式,可得水面舰艇的数量为n=Bkdjs+k-2k(3)当确定水面舰艇的数量和队形宽度后,易得各水面舰艇的具体位置点㊂图3㊀水面舰艇队形示意图2 2㊀声呐浮标的阵形和位置点2 2 1㊀声呐浮标的阵形声呐浮标配置在搜索带的两侧,采取直线阵,配置方向与水面舰艇的航向平行㊂配置时,反潜巡逻机与水面舰艇的行动应有效协同,以保证潜艇在规避水面舰艇搜索时,能够进入声呐浮标作用区㊂实现协同的方法是使反潜巡逻机活动周期与水面舰艇通过浮标障碍所需要的时间相等,即声呐浮标阵的长度等于水面舰艇在浮标工作时间内的航程㊂Lfb=vjtfb(4)式中,Lfb为声呐浮标阵的长度;vj为水面舰艇的搜索速度;tfb为声呐浮标工作时间㊂并且相邻声呐浮标作用区应有一定的重叠,以有效防止潜艇从声呐浮标之间区域逃脱㊂如图4所示,声呐浮标阵的长度[7]为Lfb=(n1-1)k1dfb(5)式中,dfb为声呐浮标的作用距离;n1为声呐浮标的数量;k1为间隔系数,通常k1ɪ[1,2]㊂由(4)㊁(5)式,可得需要的声呐浮标的数量为n1=vjtfbk1dfb+1(6)图4㊀声呐浮标阵形示意图2 2 2㊀声呐浮标的位置点确定了声呐浮标的阵形,还需要确定声呐浮标的位置点㊂先确定左右两侧基准浮标相对于侧翼舰艇的位置点㊂有了基准浮标的位置点,根据声呐浮标的间隔和布设方向,就可以依次确定其他声呐浮标的位置,最终可以完成整个队形配置㊂基准浮标为J点㊁K点的声呐浮标,如图5所示㊂确定基准浮标的位置,即要确定声呐浮标和侧翼舰艇的最小间隔Dx,以及基准浮标到水面舰艇队列线的距离Dy㊂1)声呐浮标和侧翼舰艇的最小间隔声呐浮标阵与水面舰艇的航向平行,如图5所示㊂当声呐浮标在侧翼舰艇正横位置时,与侧翼舰艇的间隔最小㊂该间隔要保证水面舰艇航行噪音和声呐工作不能干扰浮标工作㊂因此,Dx=dgr(7)式中,dgr为水面舰艇航行噪音和声呐工作不干扰第2期指挥控制与仿真35㊀图5㊀队形配置示意图浮标工作的最小距离,可以通过实测获得㊂2)基准浮标到水面舰艇队列线的距离水面舰艇的作用是发现水面舰艇搜索带内的潜艇,声呐浮标阵的作用是发现企图向水面舰艇搜索带两侧规避的潜艇㊂水面舰艇与声呐浮标阵协同时,要使规避水面舰艇搜索的潜艇进入声呐浮标阵㊂因此,声呐浮标阵应该布设在潜艇最有可能规避水面舰艇搜索的航向前方㊂首先,确定潜艇最为有利的规避航向㊂假设潜艇位于水面舰艇搜索带的左侧区域,显然潜艇向左规避更容易逃脱水面舰艇搜索㊂根据相对运动原理[8],可以把潜艇看作静止的,水面舰艇采用相对速度矢量向其运动㊂P1点为左侧舰艇的位置,P1Bң为左侧舰艇速度矢量,q点为潜艇的位置㊂假设潜艇规避速度不变,规避航向未知,把潜艇的速度矢量从q点平移到P1点,这时P1与圆上点的连线为潜艇的速度矢量㊂不难证明:当潜艇速度矢量取P1Aң,使得左侧舰艇相对速度矢量ABң与圆相切时,对于潜艇规避左侧舰艇的搜索最为有利,即潜艇距离左侧舰艇的最小距离最大㊂证明:潜艇的速度矢量为P1Aң,把潜艇看作静止的,左侧舰艇的相对速度矢量为ABң,过P1作AB的平行线P1D,P1D为左侧舰艇的相对航迹,潜艇距左侧舰艇的最小距离,即q点到P1D的垂线㊂不失一般性,不妨假设潜艇的速度矢量不是P1Aң,而是向左规避,即速度矢量为P1Aᶄң,把潜艇看作静止的,这时左侧舰艇的相对速度矢量为AᶄBң,过P1作AᶄB的平行线P1Dᶄ,P1Dᶄ为此时左侧舰艇的相对航迹㊂显然,潜艇位置q点到P1Dᶄ的距离小于到P1D的距离,问题得证㊂此时,当潜艇速度矢量为P1Aң时,øABP1称为临界角[9],用Q表示㊂Q=arcsin(|P1Aң|/|P1Bң|)=arcsin(vq/vj)(8)式中,vq为潜艇的规避速度㊂如图6所示㊂图6㊀左侧舰艇与潜艇相对运动示意图其次,确定潜艇可能逃脱水面舰艇搜索的区域㊂根据上述分析,当潜艇采取最有利的速度矢量P1Aң规避时,把潜艇看作静止的,P1D为左侧舰艇的相对航迹㊂间隔声呐作用距离作P1D的平行线EF,则EF为左侧舰艇声呐相对运动覆盖的边迹㊂同理可以得到右侧舰艇声呐相对运动覆盖的边迹EᶄF㊂这样就形成了LEFEᶄM区域,如图7所示㊂其实际意义在于:当潜艇位于LEFEᶄM区域内时,无论潜艇采取何种航向规避,其均会进入水面舰艇的声呐作用范围,即LEFEᶄM区域是水面舰艇有效搜索区域,并且LEFEᶄM区域是水面舰艇的最小有效搜索区域㊂那么,当潜艇位于LEFEᶄM区域外时,潜艇采取合适的航向规避,是可能逃脱水面舰艇搜索的,即LEFEᶄM区域外为潜艇可能逃脱水面舰艇搜索的区域㊂图7㊀潜艇可能逃脱水面舰艇搜索的区域示意图最后,确定基准浮标到水面舰艇队列线的距离㊂当潜艇位于LEFEᶄM区域外时,对于搜索带左侧区域的潜艇,其最有利的速度矢量仍为P1Aң㊂因此,布设左侧的声呐浮标阵时,可以认为潜艇采取速度矢量P1Aң规避水面舰艇搜索㊂当潜艇位于左侧区域的边界36㊀唐㊀晨,等:水面舰艇与反潜巡逻机协同检查搜潜队形配置研究第44卷点,即当潜艇位于L点时,其采取速度矢量P1Aң规避后,应该进入左侧布设的声呐浮标作用区㊂据此,为节约声呐浮标,可以将这枚浮标作为左侧的基准浮标,同理可以确定右侧的基准浮标,如图8所示㊂图8㊀队形配置示意图将图8左下侧区域放大,并作相应的辅助线,如图9所示,可知基准浮标到水面舰艇队列线的距离为Dy=|JV|+|VW|(9)其中:|JV|=|JU|cosQ=dfbcosQ(10)|VW|=|WL|tanQ=(|WP1|-|LP1|)tanQ=(Dx-djs)tanQ(11)将(10)㊁(11)式,代入(9)式,化简得Dy=DxsinQ-djssinQ+dfbcosQ(12)图9㊀队形配置左下侧区域放大图3㊀仿真验证下面,通过一个案例,验证队形配置的可行性㊂不妨假设在宽为30nmile㊁长为60nmile的搜索带内,可能存在某潜艇㊂水面舰艇与反潜巡逻机等性能参数如表1所示㊂表1㊀兵力参数表水面舰艇djs/nmile5vj/kn12声呐浮标dfb/km2tfb/h2dgr/nmile8反潜巡逻机与声呐浮标通信距离/km60携带浮标数/pcs100潜艇vq/kn7㊀3 1㊀确定水面舰艇的队形和位置点由(1)式,可得水面舰艇的队形宽度为20nmile㊂由(3)式,若间隔系数k取1 5,可得水面舰艇的数量为4艘㊂因此,水面舰艇的实际间隔为6 7nmile㊂3 2㊀确定声呐浮标的阵形和位置点首先,确定声呐浮标的阵形㊂由(4)式,可得反潜巡逻机布设的声呐浮标阵的长度为24nmile㊂由(6)式,若间隔系数k1取1 5,可知布设的数量为16pcs,实际间隔为3km㊂据此,对于长为60nmile的搜索带的两侧,需要3次布设声呐浮标㊂其中,第1次布设在t时刻,两侧分别布设16pcs,声呐浮标间隔为3km;第2次布设在t+2h,两侧分别布设16pcs,声呐浮标间隔为3km;第3次布设在t+4h,两侧分别布设9pcs,声呐浮标间隔为2 8km㊂3次共需要布设声呐浮标82pcs㊂为保证与声呐浮标阵的通信,反潜巡逻机每次在两侧声呐浮标阵之间的中心区域作环形或8字形航线飞行[10]㊂其次,确定声呐浮标的位置点㊂由(7)式,可得声呐浮标和侧翼舰艇的最小间隔为8nmile㊂由(7)㊁(8)㊁(12)式,可得基准浮标到水面舰艇队列线的距离为3 5nmile㊂确定了基准浮标的位置点,依次确定其他声呐浮标的位置点,即可完成整个队形的配置㊂综上分析,反潜巡逻机3次布设声呐浮标阵后,队形配置如图10㊁11所示㊂对于宽为30nmile㊁长为60nmile的搜索带,共需要4艘水面舰艇㊁1架反潜巡逻机组成协同检查搜潜编组执行任务,搜索时间为5h,两侧共需要布设声呐浮标82pcs㊂4㊀结束语本文运用相对运动原理和数学方法,对水面舰艇与反潜巡逻机协同检查搜潜进行了建模分析,探讨了配置原理和计算公式,并仿真验证了其可行性㊂在实际运用中,若搜索区域较大,通过计算发现需要的搜潜第2期指挥控制与仿真37㊀图10㊀第1㊁2次布设声呐浮标阵后队形配置示意图图11㊀第3次布设声呐浮标阵后队形配置示意图兵力较多时,可先将区域进行分区处理,后再运用该模型配置队形㊂在研究过程中,也存在一些不足,如未研究水面舰艇使用拖曳线列阵声呐或采取曲折机动等情况,这些问题还有待后续进一步研究分析㊂参考文献:[1]㊀鄂群,马远良,刘德才.舰机时间协同对潜检查搜索样式[J].火力与指挥控制,2009,34(10):115⁃116.[2]㊀鞠建波,祝超,单志超,等.反潜巡逻机应召布放多基地声呐阵搜潜效能研究[J].兵工自动化,2018,37(2):92⁃96.[3]㊀杨秀庭,许林周,李军,等.水面舰艇编队与反潜巡逻机协同对潜搜索效能分析[J].指挥控制与仿真,2017,39(2):15⁃18.[4]㊀崔旭涛,何友,杨日杰,等.基于舰壳声呐的多舰协同检查搜潜建模与仿真[J].海军航空工程学院学报,2009,24(5):568⁃572.[5]㊀刘哲民.反潜巡逻机的未来[J].世界军事,2019(17):26⁃31.[6]㊀刘斌,陈建华,李微波.基于搜索效能的水面舰艇编队搜潜对策研究[J].舰船电子工程,2012,32(1):17⁃18.[7]㊀敬玉平,巩健文,范赵鹏,等.应召反潜条件下浮标阵型规划研究[J].火力与指挥控制,2020,45(3):59⁃63.[8]㊀王桂军.军事航海学[M].北京:海潮出版社,2009.[9]㊀徐建志.水面舰艇对潜搜索能力建模与分析[J].舰船科学技术,2005,27(2):74⁃76.[10]徐功康,刘栋,董晶,等.预警机巡逻探测区域建模及效能分析[J].中国电子科学研究院学报,2020,15(5):470⁃476.(责任编辑:许韦韦)。
第四讲探潜先锋_拖曳线列阵声纳
行探测 ,又可以通过主动发射信号经目标反射后的 回波信号来进行检测 ,是探测辐射噪声日益降低的 潜艇的重要手段 ,通常由水面舰艇拖曳.
阵声纳 ,如果满足各基元所接收的噪声相互独立的
条件 ,那么它的增益就是 10 logN , N 越大 ,增益就越
高.
根据海洋环境噪声的统计特性 ,当水听器间距
为波长的一半时 ,各个水听器接收到的海洋环境噪
声基本相互独立 ,因此在拖曳线列阵声纳中 ,水听器
35卷 (2006年 ) 5期 http: ΠΠwww. wuli. ac. cn
战后拖曳线列阵声纳的 研究 一度 停滞 , 直到 1940年 ,丹麦的 Holm C 为美国海军研制了同时在 商船后面拖曳的双线阵声纳 ,该声纳具有鱼雷报警 功能. 在 20世纪 50年代后期 ,美国海军研究办公室 的 Lasky M 又继续了 Hayes博士的工作 ,先后进行 了一系列相关的试验 ,其中包括小外径且与电缆类 似的拖线阵声纳及安装在柔性橡胶套管中的三基元 线列阵声纳.
在第一次世界大战期间 ,美国人 Hayes H C 博 士提出一种拖曳 /舷侧线列阵声纳结构 ,如图 3 所 示. 在美国海军 Jouett号军舰的舷侧前部安装两条 12元线列阵 ,同时在其尾部拖曳两条 12元线列阵 , 这套系统的探测距离大约为 1. 8km ,应对当时潜艇 攻击已经足够.
图 3 Hayes博士提出的拖曳 /舷侧线列声纳示意图
至此拖曳线列阵声纳已经完成从概念到声纳的 试验过程 ,从 1968年开始 ,拖曳线列阵声纳开始为 大家接受 ,并逐渐扩大了应用的范围 ,成为水面舰艇 和潜艇的重要装备.
拖曳线列阵声呐

拖曳线列阵声呐与人民海军潜艇水声装备类题注:本文是发表于《舰船知识》2010年第8期,《中国潜艇与拖线阵声呐》的原稿。
刊发稿因专辑组稿需要,有较大的删改,原稿的内容更宽泛些。
本文前一部分介绍了拖线阵声呐的性能特点、优缺利弊及解决部分固有弊端的技术途径。
后一部分则从人民海军潜艇的作战需求出发,分析了拖线阵对人民海军潜艇的重要意义。
笔者水平有限,谬错难免,大家批判的看。
很多军迷朋友分不清传统的拖曳变深声呐与拖线阵声呐的区别,实际上两者在外形和工作原理上都有本质差异。
上图即为收置于贮存滚架上的拖曳线列阵声呐。
下图则为传统的拖曳变深声呐型号为DE1160,该声呐既有壳体声呐型号也有拖曳变深型号,该声呐也装备于我国的052型112、113舰。
拖曳线列阵声呐(以下简称拖线阵)是拖曳声呐中的一种,但与传统的拖曳变深声呐相比,两者在基阵阵型和工作性能上都存在较大差异。
传统的拖曳变深声呐,是将声呐基阵安置到一个透声导流罩内(拖体),并用拖缆拖曳于舰艇尾部,以实现声呐的拖曳变深与离舰(艇)工作。
但基阵阵型与壳体声呐的区别并不大,只是基阵布置位置发生了根本的改变。
而拖线阵声呐是将一定间隔的水听器,以线列阵型式布置到具有中性浮力的透声保护导管内,在基阵阵型上和传统拖曳变深声呐有本质区别。
拖线阵的声学段前后还分别有仪表段、数字段、隔振段、稳定尾绳和拖缆等,结构上和传统的拖曳变深声呐也存在很大差异。
拖线阵声呐相比壳体声呐和传统拖曳变深声呐,在探测性能上有着显著的优势,具体概括大致有以下几方面:声阵配置不受舰体布置条件限制,声阵孔径大、工作频率低、探测距离远。
在水中低频声波的传播衰减小传播距离远,声呐要提高探测距离和探测性能,增大声阵孔径降低工作频率是最直接的方法。
但壳体声呐与传统的拖曳变深声呐,受到基阵布置空间的限制,声阵孔径难以进一步增大,工作频率无法进一步降低,声呐的探测距离和探测性能要进一步提升,已非常困难。
而拖线阵的声换能器以线列阵型式布置,并拖曳于舰体外,不受舰体和拖体布置空间的制约,水听器数量多声阵长度长声阵孔径大,可接受低频乃至甚低频声波,探测距离远远大于传统的壳体声呐和拖曳变深声呐。
拖曳线列阵声呐及其左右舷分辨方法初探
642017年7月上 第13期 总第265期在水下探测技术研究方面,拖曳线列阵声呐的研究得到了诸多国家的重视。
就目前来看,该种声呐已经能够在水面舰艇、潜艇等海军船只上得到了广泛应用。
而想要使拖曳线列阵声呐的性能得到进一步提高,还要使用更加科学的左右舷分辨方法,以加强对水下目标的跟踪探测。
1 拖曳线列阵声呐概述所谓的拖曳线列阵声呐,其实就是通过将水听器在电缆上布置成线列阵,然后通过拖拽电缆完成水中目标探测的一种声呐。
利用该种声呐,可进行潜艇辐射噪声的听测,也能完成远程监视、识别和测向。
最早,人们将该种声呐安装在警戒船上,后来则将其改进并安装在水面舰艇上。
随着该技术的发展,该种声呐被广泛应用在核潜艇和水面舰艇上,主要用于进行水下环境的远距离监视,是一种被动的探测技术。
直至冷战结束,海军作战区转向大陆沿岸浅海地区,该种声呐也开始用于进行主/被动联合探测[1]。
从总体上来看,左右舷分辨方法是拖曳线列阵声呐的关键技术指标,将对该种声呐的使用产生重要影响。
2 拖曳线列阵声呐的左右舷分辨方法的探究2.1 传统左右舷分辨方法在过去的拖曳线列阵声呐基阵中,采用的是无指向性的水听器。
针对水平入射的信号,则要以基阵为轴向对称进行等强度镜像目标的分辨。
如果无法进行左右舷的分辨,声呐就会出现左右舷模糊的问题。
采用传统的分辨方法,需要使本艇完成一次转向机动,从而使单线阵根据目标方位变化进行分辨。
但该种方法的采用,无法进行目标的实时分辨。
因为在机动的过程中,还会出现单线阵发生畸变的问题,继而导致波束无法及时形成。
而直至单线阵恢复稳定后,才能完成目标左右舷的分辨。
所以,采用传统左右舷分辨方法,需要花费一定的时间才能完成左右舷分辨,从而导致目标捕获时间被延长,继而造成目标有较大的可能丢失。
2.2 左右舷交替发射方法采用本舰机动的方式进行左右舷分辨,还要从发射端或接收端的角度考虑如何实现实时分辨。
针对这一问题,英国BAe公司和法国Thcmson公司联合完成了一种发射基阵的生产,可以利用左右舷交替发射法完成左右舷分辨。
水面舰艇编队使用拖曳线列阵声纳对潜搜索问题研究

现代 水面舰艇 一 一 般装备 多种反潜 武器和探测声 纳 , 尤 其 是装备的拖曳线列阵声 纳 , 具有 良好 的探 测性 能和 隐蔽性 , 可在敌潜艇对我构成威 胁前 及时发现敌潜艇 的活动征候 , 为 舰载反潜直升机前出进 行精 确搜 索和攻击提供 引导数据 , 提 高搜索发现概率 , 对于舰艇远程对潜搜索 和引导助飞火箭 鱼
丁红岩 , 董 晓 明
( 海军大连舰艇学院 水武与防化系 , 辽宁 大连 1 1 6 0 1 8 )
摘要 : 拖 曳线列阵声纳 , 具有 良好 的探测性能和 隐蔽性 , 但是 因其被动 工作 方式 以及 其他 技术上 的限制 , 舰首 附近存 在着一定角度的舰首盲区 , 针对该问题 , 分析 了编队对潜 搜索时弥 补盲 区的方法 , 提 出了三舰 编 队弥补拖曳 阵声纳
Abs t r a c t :Th e t o we d l i n e a r — a r r a y s o n a r ha s b e t t e r d e t e c t i n g c a pa b i l i t y a n d i n v i s i b i l i t y .Th e s u fa r c e wa r s h i p h a s d e f i ni t e bl i n d a n g l e a h e a d b e c a u s e t h e t o we d l i n e a r . - a ra y s o n a r t a k e s p a s s i v e d e t e c t i o n a n d o t h e r t e c h . - ni c a l l i mi t . Ai mi n g a t t h i s p r o b l e m ,t h i s p a pe r a na l y s e s t h e me t h o d t o o f f s e t b l i n d a r e a,a n d t h e n,pu t s f o r wa r d s t a t i o n a n d u s i n g me t h o d o f t h r e e s h i ps t o o f f s e t b l i n d a r e a .T h i s me t h o d h a s b e t t e r ma n e u v e r a b i l i t y a n d c a n a d v a n c e h u n t i n g e ic f i e n c y t o s u b ma r i n e . Ke y wo r ds :f o r ma t i o n;t o we d l i n e a r — a ra y s o n a r ;h u n t s u bma r i n e
浅谈舰船拖曳线列阵声纳的发展
浅谈舰船拖曳线列阵声纳的发展
刘炳霞
【期刊名称】《中外船舶科技》
【年(卷),期】2004(000)002
【摘要】声纳作为探测潜艇的有效装备,从其诞生之日起就伴随着潜艇技术的发展而发展。
鉴于低频大功率声波在海水中的传播特性以及与基阵的关系,开发大孔径低频被动声纳技术是解决远程探潜问题、进行有效反潜的必要前提。
二十世纪70年代末、80年代初出现的拖曳线列阵声纳是在这种低频大孔径水声技术的【总页数】3页(P16-18)
【作者】刘炳霞
【作者单位】江苏科技大学,江苏,镇江,212003
【正文语种】中文
【中图分类】U6
【相关文献】
1.拖曳线列阵声纳发展概述 [J], 陈云飞;李长军;闰俊
2.国外拖曳线列阵声纳技术现状与发展趋势 [J], 邵云生;彭会斌;宋君才
3.单舰拖曳线列阵声纳检查反潜模型与仿真研究 [J], 吴福初;徐寅;于昊天;蓝天
4.基于拖曳线列阵声纳与ARPA雷达的目标分选 [J], 高枫;颜明重;朱大奇
5.减速状态下多分枝拖曳线列阵声纳系统的功能有效性 [J], 周晨;朱克强;史英沙;毛垚飞;赵望奇
因版权原因,仅展示原文概要,查看原文内容请购买。
潜艇声呐
浅谈潜艇拖拽线列阵声呐摘要反潜战技术进展的需求促进拖曳线列阵声纳技术迅速发展,拖曳线列阵声纳在反潜战中扮演着越来越重要的角色。
本文介绍了拖拽线列阵声呐的发展史,基本组成,工作原理和其未来主要发展趋势。
关键词声呐,拖拽线列阵,反潜Brief talk the submarine towing line arraysonarAbstract P rogress in technologies of anti-submarine war needs to promote towed line array sonar technology rapid development, towed line array sonar plays a more and more important role in anti-submarine warfare. This paper introduces the history of towed line array sonar, the basic composition, working principle and the main development trend in the future.Key words sonar, Towed line array ,Anti-submarine warfare1.前言拖曳线列阵声呐是拖曳声呐中的一种,但与传统的拖曳变深声呐相比,两者在基阵阵型和工作性能上都存在较大差异。
传统的拖曳变深声呐,是将声呐基阵安置到一个透声导流罩内(拖体),并用拖缆拖曳于舰艇尾部,以实现声呐的拖曳变深与离舰(艇)工作。
但基阵阵型与壳体声呐的区别并不大,只是基阵布置位置发生了根本的改变。
而拖线阵声呐是将一定间隔的水听器,以线列阵型式布置到具有中性浮力的透声保护导管内,在基阵阵型上和传统拖曳变深声呐有本质区别。
拖线阵的声学段前后还分别有仪表段、数字段、隔振段、稳定尾绳和拖缆等,结构上和传统的拖曳变深声呐也存在很大差异。
单舰拖曳线列阵声纳检查反潜模型与仿真研究
单舰拖曳线列阵声纳检查反潜模型与仿真研究吴福初;徐寅;于昊天;蓝天【期刊名称】《兵工自动化》【年(卷),期】2017(036)001【摘要】针对采用不同战术行动方法时单舰检查反潜搜潜效能存在差异的问题,在分析单舰检查反潜战术行动方法及拖曳线列阵声纳战术使用特点的基础上,建立单舰3种典型战术行动方法下的检查反潜模型。
结合潜艇运动模型与搜索概率及时间模型,利用蒙特卡罗方法进行仿真实验。
仿真结果表明:相同仿真条件下,单舰采用包围方形搜索方法进行检查反潜的搜索概率及时间具有优越性。
该结论对正确评估单舰反潜作战能力及合理运用反潜作战兵力具有十分重要的意义。
%Aiming at the problem that search effectiveness of single-ship checking anti-submarine with different tactical action methods exited differences, established three single-ship checking anti-submarine models with typical tactical action methods, by analyzing tactical action methods of single-ship checking anti-submarine and towed linear array sonar operation feature. Based on submarine motion models and searching probability and time models, this paper used the Monte Carlo method to simulate the process of checking anti-submarine. The results show that single-ship checking anti-submarine with bounding square search method has superiority under the same simulation conditions. The conclusion has great significance to correct assessment of single-ship anti-submarine operational capability and rational use of anti-submarine force.【总页数】4页(P76-79)【作者】吴福初;徐寅;于昊天;蓝天【作者单位】海军海空工程学院指挥系,山东烟台 264001;海军海空工程学院指挥系,山东烟台 264001;海军海空工程学院基础部,山东烟台 264001;海军指挥学院战役系,南京 210016【正文语种】中文【中图分类】TP391.92【相关文献】1.水面舰艇编队使用拖曳线列阵声纳对潜搜索问题研究 [J], 丁红岩;董晓明2.基于拖曳线列阵声纳的潜艇武器发射噪声监测仿真研究 [J], 程广涛;张振山;曾广会3.配备拖曳声纳的舰机联合反潜应用 [J], 杨丽;袁子立;刘丹丹4.双舰拖曳线列阵声纳对目标被动定位最佳舰距的确定 [J], 叶琼龙;饶建国5.基于拖曳线列阵声纳的噪声监测仿真方法 [J], 程广涛;朱军;曾广会因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
队在对潜搜索时通常采用单横队队形, 利用双舰联合探测测 向和弥补拖曳阵声纳的舰首盲区。本文主要探讨消除声纳 盲区问题。
㊀㊀收稿日期: 2 0 1 3- 0 3- 0 7 作者简介: 丁红岩( 1 9 5 8 —) , 男, 博士, 副教授, 主要从事反潜武器战斗使用及作战仿真研究。
丁红岩, 等: 水面舰艇编队使用拖曳线列阵声纳对潜ʃ X X ʎ 的盲区, 从图 1中可以 X ʎ 的 看出, 单独使用拖线阵声纳搜索时各舰航向线左右各 X 区域不能探测目标, 为编队的搜索带来了不利的影响。现有 弥补舰首盲区比较成熟的方法有舰壳声纳消除盲区法, 舰艇 机动消除盲区法和两拖线阵声纳配合使用消除盲区法。
第3 4卷㊀第 8期 四 川 兵 工 学 报 2 0 1 3年 8月 【 武器装备理论与技术】 d o i : 1 0 . 1 1 8 0 9 / s c b g x b 2 0 1 3 . 0 8 . 0 0 2
A b s t r a c t :T h e t o w e dl i n e a r a r r a y s o n a r h a s b e t t e r d e t e c t i n g c a p a b i l i t y a n di n v i s i b i l i t y . T h e s u r f a c e w a r s h i p h a s d e f i n i t eb l i n da n g l ea h e a db e c a u s e t h e t o w e dl i n e a r a r r a y s o n a r t a k e s p a s s i v e d e t e c t i o na n do t h e r t e c h ,t h i s p a p e r a n a l y s e s t h em e t h o dt oo f f s e t b l i n da r e a ,a n dt h e n ,p u t s n i c a l l i m i t .A i m i n ga t t h i s p r o b l e m f o r w a r ds t a t i o na n du s i n g m e t h o do f t h r e e s h i p s t o o f f s e t b l i n da r e a .T h i s m e t h o dh a s b e t t e r m a n e u v e r a b i l i t y a n dc a na d v a n c eh u n t i n ge f f i c i e n c yt os u b m a r i n e . K e yw o r d s :f o r m a t i o n ;t o w e dl i n e a r a r r a ys o n a r ;h u n t s u b m a r i n e
T h eR e s e a r c ho f U s i n gT o w e dL i n e a r A r r a yS o n a rt oH u n t S u b ma r i n e b yt h eS u r f a c eWa r s h i pF o r ma t i o n
1 - 2 ] 一定角度的舰首盲区 [ 。因此, 一般情况下, 水面舰艇编
1 ㊀编队对潜搜索消除盲区方法
通常编队采用两艘舰组成单横队平行对潜搜索, 假设舰 间间隔等于拖线阵声纳的最大有效搜索宽度 M 时, 而 M一 般采用 1 . 8 1 . 8 5倍的声纳有效作用距离, 若取拖线阵声纳 对潜搜索的最大有效作用距离为 6 0k m , 则编队舰舰间距约 为1 0 8k m , 双舰编队最大有效搜索宽度为 2 2 8k m ( 如图 1所 示) 。 ㊀㊀分析编队搜索能力, 双舰编队使用拖线阵声纳时的搜索 宽度一般可满足潜艇活动区域较宽的情况, 而且各舰互相干 扰小, 综合两舰的目标信息即可消除拖线阵声纳左右舷模糊 问题, 还可通过两舰交叉方位定位得到粗略的目标位置信
㊀㊀现代水面舰艇一般装备多种反潜武器和探测声纳, 尤其 是装备的拖曳线列阵声纳, 具有良好的探测性能和隐蔽性, 可在敌潜艇对我构成威胁前及时发现敌潜艇的活动征候, 为 舰载反潜直升机前出进行精确搜索和攻击提供引导数据, 提 高搜索发现概率, 对于舰艇远程对潜搜索和引导助飞火箭鱼 雷远程攻击具有重要意义。但是因其被动工作方式以及其 他技术上的限制只能测向, 不能测距; 并且拖线阵探测时受 到舰艇自身的影响, 舰首附近的信号遭到遮盖, 因而存在着
D I N GH o n g y a n ,D O N GX i a o m i n g
( D e p a r t m e n t o f U n d e r w a t e r We a p o na n dC h e m i c a l D e f e n s e ,D a l i a nN a v yA c a d e m y ,D a l i a n1 1 6 0 1 8 ,C h i n a )
水面舰艇编队使用拖曳线列阵声纳 对潜搜索问题研究
丁红岩, 董晓明
( 海军大连舰艇学院 水武与防化系, 辽宁 大连㊀1 1 6 0 1 8 ) 摘要: 拖曳线列阵声纳, 具有良好的探测性能和隐蔽性, 但是因其被动工作方式以及其他技术上的限制, 舰首附近存 在着一定角度的舰首盲区, 针对该问题, 分析了编队对潜搜索时弥补盲区的方法, 提出了三舰编队弥补拖曳阵声纳 舰首盲区的配置和使用方法, 具有可操作性, 可提高对潜搜索的搜索效率。 关键词: 编队; 拖曳阵声纳; 对潜搜索 中图分类号: E 9 2 5 . 4 文献标识码: A 文章编号: 1 0 0 6- 0 7 0 7 ( 2 0 1 3 ) 0 8- 0 0 0 6- 0 3