第四讲探潜先锋_拖曳线列阵声纳
国外潜用拖线阵声呐简介
拖线阵集成 了 9 个 水听器 ,由两个隔振模块 , 8 一
个 环 境模 块 , 四个 低 频 段 、两 个 中频段 、 两个 高
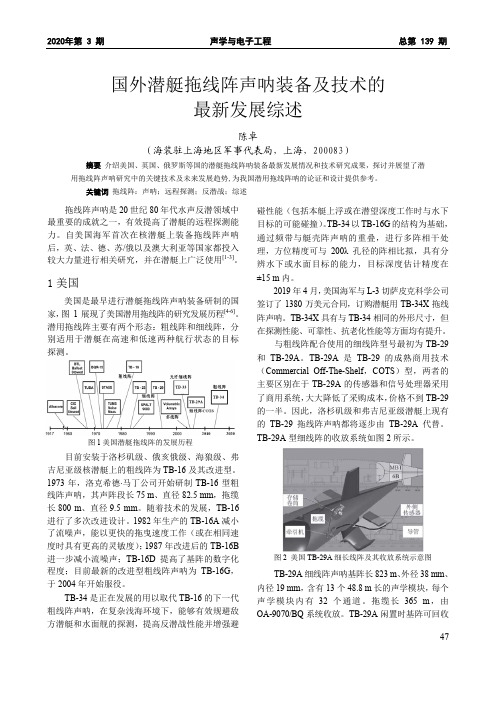
频 段 模 块组 成 。 与 T 一3相 比,T 2 A)[25 称 得 上 细 B2 B一9( 24更 ]
潜 艇 作 战 系 统 的标 配 设 备 。两 者 的主 要 差 别 在 于
基 阵远 离 其 拖 带 平 台 ,并 可 选择 在 最 有 利 的深 度 工作 ,背 景 干 扰 大 为 减 小 ,传 播 条件 相 对 有 利 。
基 于这 两 大 特 点 ,拖 线 阵 声 呐 与 其他 常规 声 呐相
比,探 测 能力 大 为 提 高 。拖 线 阵 声 呐 作 为平 台声 呐 中工 作 频 率 最 低 、作 用 距 离 最 远 的 设 备 , 已成 为水 面 舰 艇 、潜 艇 的主 要 声 呐 装 备之 一 。 2 0世 纪 6 0年 代 ,美 国在 Alaoe号 多功 能 bc r 水 下试 验 潜 艇 上 开展 了拖 线 阵试 验 。其 间 ,CI C、
国、德 国 、俄 罗 斯 ( 苏 联 ) 前 、澳 大 利 亚 甚 至 日本
均 根据 各 自国情 和 需求 ,相 继 研 制 并 装 备 了一 系
44
跨度 的 持 续 改进 ,离 不 开军 方 的持 续 关 注 和 承 制
庞博:国外潜用拖线阵声呐简介
方 的 精 品 意 识 。其 直 接 结 果 就 是 , 该 声 呐 作 为
A B N/ QQ一 、A B 5 N/ QQ一 、A B 6 N/ QQ一0等 声 呐系 统 1
此 外 ,T 3 潜 艇 光 纤 细 线 阵声 呐 的主 要 目 B一3 的是 在 保 证 与 现 役 的 T 一9 细线 阵 具有 同样 功 B 2A 能 的 同 时 , 更 加 显 著 改 善 系 统 可 靠 性 。 而 AN B 一5 新 型 粗 线 拖 线 阵 声 呐 ,将 就 下 一 代 / QR 2 “ 线 ”拖 线 阵 [的 原 型 机 开 展 研 制 ,计 划 替 代 粗 4 】 T .6 B 1 ,重 点 在 于 提 高对 目标 的定 深 精 度 、 声 线 到达 角 精 度 、 高 浅 海/ 低 速 条件 的 使用 性 能及 提 极 解 决 转 向 过 程 中 的 目标 跟 踪 问题 等 , 并 与 已有 T .6所 使 用 的 OK一7 B1 2 6拖 线 阵 收放 系 统 适 配 。
国外潜艇拖线阵声呐装备及技术的最新发展综述
2020年第 3 期 声学与电子工程 总第 139 期国外潜艇拖线阵声呐装备及技术的最新发展综述陈卓(海装驻上海地区军事代表局,上海,200083)摘要 介绍美国、英国、俄罗斯等国的潜艇拖线阵呐装备最新发展情况和技术研究成果,探讨并展望了潜用拖线阵声呐研究中的关键技术及未来发展趋势,为我国潜用拖线阵呐的论证和设计提供参考。
关键词拖线阵:声呐;远程探测;反潜战;综述拖线阵声呐是20世纪80年代水声反潜领域中最重要的成就之一,有效提高了潜艇的远程探测能力。
自美国海军首次在核潜艇上装备拖线阵声呐后,英、法、德、苏/俄以及澳大利亚等国家都投入较大力量进行相关研究,并在潜艇上广泛使用[1-3]。
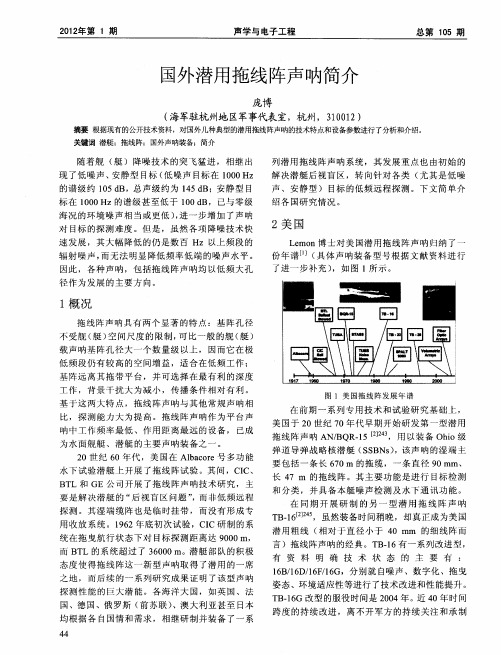
1美国美国是最早进行潜艇拖线阵声呐装备研制的国家,图 1 展现了美国潜用拖线阵的研究发展历程[4-6]。
潜用拖线阵主要有两个形态:粗线阵和细线阵,分别适用于潜艇在高速和低速两种航行状态的目标探测。
图1美国潜艇拖线阵的发展历程目前安装于洛杉矶级、俄亥俄级、海狼级、弗吉尼亚级核潜艇上的粗线阵为TB-16及其改进型。
1973年,洛克希德·马丁公司开始研制TB-16型粗线阵声呐,其声阵段长75 m、直径82.5 mm,拖缆长800 m、直径9.5 mm。
随着技术的发展,TB-16进行了多次改进设计。
1982年生产的TB-16A减小了流噪声,能以更快的拖曳速度工作(或在相同速度时具有更高的灵敏度);1987年改进后的TB-16B 进一步减小流噪声;TB-16D提高了基阵的数字化程度;目前最新的改进型粗线阵声呐为TB-16G,于2004年开始服役。
TB-34是正在发展的用以取代TB-16的下一代粗线阵声呐,在复杂浅海环境下,能够有效规避敌方潜艇和水面舰的探测,提高反潜战性能并增强避碰性能(包括本艇上浮或在潜望深度工作时与水下目标的可能碰撞)。
TB-34以TB-16G的结构为基础,通过频带与艇壳阵声呐的重叠,进行多阵相干处理,方位精度可与200λ孔径的阵相比拟,具有分辨水下或水面目标的能力,目标深度估计精度在±15 m内。
杂谈综合声纳、舷侧阵声纳、拖曳阵声纳

杂谈综合声纳、舷侧阵声纳、拖曳阵声纳1引言潜艇安装有多种声纳,根据其用途来划分分为探测声纳、导航声纳和通信声纳等类型。
这其中探测声纳与作战息息相关,也就最受军迷关注。
探测声纳一般有三种类型,即:潜艇首部安装的综合声纳、舷侧安装的舷侧阵声纳和潜艇运动时由尾部拖曳电缆拖曳的拖曳阵声纳。
一般潜艇都具有综合声纳,而舷侧阵声纳和拖曳阵声纳则是近几十年来声纳的热点,也是很多时候军迷区分潜艇是否先进的着眼点。
就其特点简单的说:综合声纳功能全面,性能平衡,兼顾主被动功能,覆盖频段较宽,使用方便,尾部有一定盲区;舷侧阵声纳主要覆盖中低频段,被动探测为主,探测距离较远,有的具有测距功能,使用方便,首部和尾部都有一定盲区;拖曳阵声纳主要覆盖低频频段,被动探测为主,探测距离远,但是使用不是很方便,需要保持一定航速,高速下性能可能下降且影响潜艇机动,收放线阵时可能会产生额外噪声。
下面笔者通俗的介绍下三种声纳的布置形式、基本原理、应用范围以及各自的优缺点。
2综合声纳综合声纳一般布置在潜艇首部的声纳导流罩内,所以有时也叫艏部声纳或艇首声纳(但不能叫球鼻艏声纳,球鼻艏是现代水面舰特有的),后部有隔声吸声障板。
其一般采用主动、被动发射基阵分置的方式,其中被动基阵布阵形式一般采用柱面阵、球面阵和共形阵三种;主动基阵一般采用平板阵、柱面阵和球面阵三种。
因为潜艇受隐蔽性考虑,综合声纳一般都只使用被动工作状态,所以一般军迷只关注被动的基阵。
因此本文就集中谈一下被动基阵。
为说清楚声纳必须先说一下声纳的探测原理。
声纳基阵是通过波束对目标进行探测的,所谓波束就是将发射或接收到的声信号通过相位控制,使其指向性朝着一个特定的方向,这个“相控”的方法就是所谓的波束形成了。
一般的波束形成是指将一定几何形状(直线、圆柱、弧形等)排列的多元基阵各阵元输出经过处理(例如加权、时延、求和等)形成空间指向性的方法。
对于模拟电子时代(也就是80年代以前)来说一般采用硬件延迟线的方式,对于数字电子时代前期(80—90年代)一般采用硬件移相器,对于当代一般采用全数字采集后进行数字移相的方式。
拖曳阵鱼雷报警声纳测向精度试验方法
拖曳阵鱼雷报警声纳测向精度试验方法黎阳;张福生;陈宝柱【摘要】针对水面舰船拖曳阵鱼雷报警声纳测向精度试验问题,提出了选取两种不同目标的试验方法.对比分析了两种试验方法的优缺点,定量分析了试验目标定位精度和试验样本量要求,对试验方法进行了优选,基于科学性、合理性、贴近实战的原则,提出了两种试验方法联合使用的综合试验方法,可为后续鱼雷报警声纳测向精度试验设计和实施提供借鉴.【期刊名称】《船电技术》【年(卷),期】2019(039)001【总页数】4页(P57-60)【关键词】鱼雷报警声纳;测向精度;试验方法【作者】黎阳;张福生;陈宝柱【作者单位】91388 部队,广东湛江 524022;91388 部队,广东湛江 524022;91388 部队,广东湛江 524022【正文语种】中文【中图分类】TJ631水面舰船拖曳阵鱼雷报警声纳(以下简称鱼雷报警声纳)是水面舰船水下防御系统的重要组成设备,一般采用水下拖曳的方式使鱼雷报警声纳基阵远离本舰,降低舰船自噪声干扰影响,提高对水下目标的探测能力,实现对水下来袭鱼雷的探测、跟踪和声光报警,并提供准确的鱼雷方位信息,为指挥员使用对抗武器进行水下防御提供信息保障。
测向精度是鱼雷报警声纳的重要指标,该指标直接影响到水面舰船对来袭鱼雷方位的判别,进而决定了其对鱼雷的防御效果。
因此,测向精度试验结果能否科学反映贴近实战条件下鱼雷报警声纳实际作战能力至关重要。
鱼雷报警声纳与其他常规声纳相比存在较大差异,由于其作战对象为鱼雷目标,对比潜艇而言鱼雷具有体积小、航行速度快、水下定位难、试验风险高、试验消耗大等特点,使用常规声纳对潜艇测向精度的试验方法难以满足鱼雷报警声纳试验的需求。
按照贴近实战条件下试验的原则,试验时鱼雷报警声纳一般安装在实装平台上,在海上实际使用条件下,进行测向精度试验,根据试验目标类型不同,可分为使用鱼雷作为目标和使用水面舰船作为目标两种方法。
在目前组织进行的鱼雷报警声纳测向精度试验中,由于受测量保障条件、鱼雷保障和试验时间等因素限制,一般使用水面舰船代替鱼雷进行试验,试验时目标舰和试验舰高速相向航行,以此来模拟鱼雷来袭时的方位变化情况,此方法在相关定型试验规程中已有明确规定。
国外 UUV拖曳声呐试验情况分析
国外 UUV拖曳声呐试验情况分析李佳橦;陈强;王连文【摘要】本文描述了 SLITA和微型 SLITA接收声信号试验和噪声分析过程及结果,并绘制接收声信号模块图。
同时,描述了 TOSSA收发声信号试验及分析过程和结果,并绘制发射声信号模块图和建立声信号单程传输基本模型。
%The paper describes receiving acoustic systems experiments for SLITA and Micro-SLITA, whose results are used to analysis noise, and sets receiving model. Meanwhile, the paper also describes and analysis receiving and transmitting acoustic systems for TOSSA, and sets transmitting model and receiving and transmitting model for one way.【期刊名称】《舰船科学技术》【年(卷),期】2016(038)010【总页数】4页(P150-153)【关键词】UUV;声呐;拖曳阵;接收和发射声信号;试验【作者】李佳橦;陈强;王连文【作者单位】中国人民解放军 92537部队,北京 100161;中国人民解放军 92537部队,北京 100161;中国人民解放军 92537部队,北京 100161【正文语种】中文【中图分类】TB567经过长时间的探索和分析,人们发现声波在海水中的传播能力为最佳,其他辐射形式例如电磁波和光波在海水中的衰减都比声波大得多[1]。
长期以来,为了保障潜艇使命任务的完成,配备了多种声呐,在这种配置下,潜艇的作战行动得到了保证[2]。
现如今由潜艇搭载拖曳声呐进行探测任务已成国内外反潜战发展趋势。
拖曳线列阵声呐简称“拖曳阵声呐”,它是将水听器安置在电缆上形成线列阵,由拖曳电缆拖在潜艇后部水中探测目标的声呐[3]。
拖曳线列阵声呐及其左右舷分辨方法初探

拖曳线列阵声呐及其左右舷分辨方法初探作者:梁峰来源:《中国科技纵横》2017年第13期摘要:在反潜战中,拖曳线列阵声呐将发挥重要作用。
基于这种认识,本文对拖曳线列阵声呐的概念、发展情况和几种典型的声呐进行了分析,然后对影响其性能的左右舷分辨方法展开了探究,从而为关注这一话题的人们提供参考。
关键词:拖曳线列阵声呐;左右舷;分辨方法中图分类号:U666.7 文献标识码:A 文章编号:1671-2064(2017)13-0064-01在水下探测技术研究方面,拖曳线列阵声呐的研究得到了诸多国家的重视。
就目前来看,该种声呐已经能够在水面舰艇、潜艇等海军船只上得到了广泛应用。
而想要使拖曳线列阵声呐的性能得到进一步提高,还要使用更加科学的左右舷分辨方法,以加强对水下目标的跟踪探测。
1 拖曳线列阵声呐概述所谓的拖曳线列阵声呐,其实就是通过将水听器在电缆上布置成线列阵,然后通过拖拽电缆完成水中目标探测的一种声呐。
利用该种声呐,可进行潜艇辐射噪声的听测,也能完成远程监视、识别和测向。
最早,人们将该种声呐安装在警戒船上,后来则将其改进并安装在水面舰艇上。
随着该技术的发展,该种声呐被广泛应用在核潜艇和水面舰艇上,主要用于进行水下环境的远距离监视,是一种被动的探测技术。
直至冷战结束,海军作战区转向大陆沿岸浅海地区,该种声呐也开始用于进行主/被动联合探测[1]。
从总体上来看,左右舷分辨方法是拖曳线列阵声呐的关键技术指标,将对该种声呐的使用产生重要影响。
2 拖曳线列阵声呐的左右舷分辨方法的探究2.1 传统左右舷分辨方法在过去的拖曳线列阵声呐基阵中,采用的是无指向性的水听器。
针对水平入射的信号,则要以基阵为轴向对称进行等强度镜像目标的分辨。
如果无法进行左右舷的分辨,声呐就会出现左右舷模糊的问题。
采用传统的分辨方法,需要使本艇完成一次转向机动,从而使单线阵根据目标方位变化进行分辨。
但该种方法的采用,无法进行目标的实时分辨。
因为在机动的过程中,还会出现单线阵发生畸变的问题,继而导致波束无法及时形成。
美ANSQR-19型拖曳声呐
美ANSQR-19型拖曳声呐美国AN/SQR-19型被动拖曳线列阵声呐拖曳线列阵声呐一开始是在民用部门发展起来的。
美国西方石油公司、物探公司先后使用拖曳线列阵来接收地震回波,寻找海底石油,当然使用的频率是非常低的,一般在120Hz以下。
在实际使用中,发现这种被动拖曳线列阵具有远程听测潜艇低频辐射噪声的能力,所以美国海军在70年代开始致力于把它移植到军舰上的研究:1975年6月首先研制出AN/SQR-14,不久又研制出AN/SQR-18,均为过渡型号。
(一)研制简史AN/SQR-19被动拖曳线列阵声呐是在AN/SQR-18的基础上开发的,工作始于1976年。
它是由美国西屋电气公司、古尔德公司和通用电气公司协作研制的。
到1982年把第一部AN/SQR-19试验样机首次安装于美国海军DD-980(Moosbmgger)号导弹驱逐舰上,经试验鉴定后,自1983年开始正式批准生产。
1985年7月AN/SQR-19第一套生产样机正式交付使用。
该声呐的主要使命是对潜远距离被动探测、噪声测向、跟踪和识别,对水面舰艇也具有远距离探测能力。
在AN/SQQ-89(V)舰载综合反潜作战系统中,AN/SQR-19承担了大范围远距离初始探测,引导舰载反潜直升机SH-60B迅速飞往目标区域,使用机载探潜设备对潜艇实施精确定位,用机载反潜武器对潜攻击或经数据链给母舰传输目标数据由舰载远程武器对潜攻击。
AN/SQR-19还与AN/SQS-53C声呐相互配合,互为补充,保证中、近程对潜探测、跟踪、识别、定位以及武器的使用。
该声呐由于技术先进和性能优良,美海军目前已装备98艘舰艇,陆续装备了改装型CG-47级导弹巡洋舰、DD-963级驱逐舰、DDG-51级导弹驱逐舰和FFG-7级导弹护卫舰,作为舰载综合反潜作战系统AN/SQQ-89(V)中的一个分系统。
同时,在1987年底美国政府已批准向澳大利亚、加拿大和西班牙等国出售,每套单价为900-1000万美元(1987年)。
拖曳线列阵若干关键技术综述
2020年第 2 期 声学与电子工程 总第 138 期拖曳线列阵若干关键技术综述朱辉庆1 张海生 2(1.海装驻杭州地区军事代表室,杭州,310023;2.第七一五研究所,杭州,310023)摘要拖曳线列阵声呐具有工作频率低、声学孔径大和受拖曳平台辐射噪声影响小等优点,在反潜战中发挥重要作用。
文章对压电阵和光纤阵的共性关键技术中三个方向:水听器及基阵技术、拖曳噪声抑制技术和左右舷分辨技术进行了分析,并总结上述技术未来的重点研究内容。
关键词拖曳线列阵;水听器;拖曳噪声;左右舷分辨;综述随着潜艇静音技术的不断发展,各国纷纷投入大量人力和物力研发拖曳线列阵声呐用于探测敌方潜艇的辐射噪声和特征线谱[1]。
拖曳线列阵具有以下优点:(1)工作频率低,具备探测潜艇辐射噪声中低频线谱的能力;(2)声基阵长度受拖曳平台尺寸限制小,易于扩展声学孔径;(3)声基阵远离拖曳平台,通过合理设计拖缆长度,可大幅度降低拖曳平台噪声对声呐探测性能的影响。
拖曳线列阵的研究最早始于一战期间,现阶段理论研究基本成熟,研究重点转向解决实际装备中遇到的技术和工程问题[2]。
拖曳线列阵根据直径可分为细线阵和粗线阵两大类。
细线阵方面,美国于1991年开始研制用于水面舰拖曳监视系统(Surveillance Towed Array Sensor System,SURTASS)的TB-29A型细线阵,并于2005年宣布通过验收,装备于洛杉矶级、海狼级和弗吉尼亚级攻击型核潜艇[3,4]。
2006年,美国海军授权Chesapeake Science 公司生产两套TB-33型潜用拖曳阵声呐系统,TB-33将逐渐替代TB-29A。
粗线阵方面,美海军于2018年授予Chesapeake Science 公司生产TB-34X拖曳线列阵声呐。
TB-34X与TB-34具有相同的外形尺寸,但探测性能、可靠性、抗老化性能均有所提高。
现阶段,拖曳线列阵发展较快是压电阵和光纤阵。
声纳原理_典型数字式声纳
2。拖曳式线列阵声纳的一般概念
目前,拖曳式线列阵声纳主要分两大类,即被动式和 主被动联合式。下面给出主被动拖曳式声纳系统构成 框图。
杨益新
3
发射换能器可以有以下两种形式:
杨益新
4接收机功能分解:杨益新53。拖缆在水下的运动姿态
涉及到流体力学问题。
杨益新 6
4。阵形畸变问题
阵形畸变:
声纳原理
典型数字式声纳
任课教师:杨益新 电子邮件:yxyang@ 办公电话:88460373 办公地址:航海学院322室
杨益新 1
第一节 拖曳式线列阵声纳
拖曳式线列阵声纳是20世纪70年代开始研制并装备部 队的声纳。经过近30年的努力已成为水面舰艇和潜艇的重 要声纳装备之一。
杨益新
7
5。目标方位的左、右舷模糊问题
平台机动消除模糊
杨益新
8
使用偶极子或三基元组合消除模糊
杨益新
9
6。典型拖曳式线列阵声纳介绍
杨益新
10
COMTASS-Compact Towed Array Sonar System,是 英国20世纪80年代产品。 湿端由尾绳、隔震模块、仪表模块和声学模块组成,拖缆最 长可达1200米。 声学模块由64个基元构成,相邻水听器间隔1米,可以组成 32元的低频阵和中频阵。 绞车是液压驱动系统,可以保证在0.5~1.5m/s之间无级变 速,并包括自动排缆系统。 仪表模块中包含深度传感器、温度传感器和航向传感器等。 声纳信号处理系统的硬件以Motorola公司生产的96000系列 为CPU,具有故障自检系统。 波束形成分为宽带和窄带两种方式,均为频域算法。 显控台有数字、字符显示,可以对目标进行手动录入跟踪, 最多可以跟踪4个目标。 通过DEMON分析进行机助辅助目标识别。
美国潜艇拖曳阵声呐技术特点及发展趋势
美国潜艇拖曳阵声呐技术特点及发展趋势董波;张郑海【摘要】根据现有公开技术资料,对美国潜艇拖曳阵声呐的发展情况、技术特点进行阐述,并预测了拖曳阵声呐的发展趋势。
%According to the prior art disclosed the information, on the development of the US submarine towed array sonar, technical characteristics described, and forecasts the development trend of towed array sonar.【期刊名称】《舰船科学技术》【年(卷),期】2016(038)009【总页数】4页(P150-153)【关键词】潜艇;拖曳阵;声呐【作者】董波;张郑海【作者单位】海军信息局电子设备处,北京100036;渤海船舶重工有限责任公司,辽宁葫芦岛125004【正文语种】中文【中图分类】TN929.3艇载拖曳阵声呐拖曳在潜艇的尾部,系统分为两大部分:湿端缆阵和收放分系统,其中湿端缆阵突破了平台空间尺寸限制,基阵孔径可以很大,并且远离本艇噪声源,工作频率较之艇载其他常规声呐更低,可根据需要选择有利的工作深度,背景干扰小,探测能力强。
另外,随着现代潜艇抑制大于 1 kHz 辐射噪声能力的增强,更突显了艇载拖曳阵声呐在探测领域的重要性。
在艇载声呐系统中,拖曳阵声呐虽然起步较晚,但其迅速发展成为潜艇主要声呐装备之一,各海军强国艇载拖曳阵声呐大约经历了 50 多年的发展,最早为了验证拖曳阵声呐的性能,拖曳阵声呐是采取挂带式的方式搭载于水面舰艇上的,随着潜艇降噪技术的发展,要求先于敌方探测发现目标的作战需求日益迫切,潜艇平台逐渐开始搭载拖曳阵声呐,由采取挂带式拖曳阵声呐,发展到尾部集中式布置,目前美国海军搭载于潜艇平台的拖曳阵均是被动拖曳阵声呐,典型拖曳阵声呐型号及装备情况如表1所示。
拖曳线列阵声呐

拖曳线列阵声呐与人民海军潜艇水声装备类题注:本文是发表于《舰船知识》2010年第8期,《中国潜艇与拖线阵声呐》的原稿。
刊发稿因专辑组稿需要,有较大的删改,原稿的内容更宽泛些。
本文前一部分介绍了拖线阵声呐的性能特点、优缺利弊及解决部分固有弊端的技术途径。
后一部分则从人民海军潜艇的作战需求出发,分析了拖线阵对人民海军潜艇的重要意义。
笔者水平有限,谬错难免,大家批判的看。
很多军迷朋友分不清传统的拖曳变深声呐与拖线阵声呐的区别,实际上两者在外形和工作原理上都有本质差异。
上图即为收置于贮存滚架上的拖曳线列阵声呐。
下图则为传统的拖曳变深声呐型号为DE1160,该声呐既有壳体声呐型号也有拖曳变深型号,该声呐也装备于我国的052型112、113舰。
拖曳线列阵声呐(以下简称拖线阵)是拖曳声呐中的一种,但与传统的拖曳变深声呐相比,两者在基阵阵型和工作性能上都存在较大差异。
传统的拖曳变深声呐,是将声呐基阵安置到一个透声导流罩内(拖体),并用拖缆拖曳于舰艇尾部,以实现声呐的拖曳变深与离舰(艇)工作。
但基阵阵型与壳体声呐的区别并不大,只是基阵布置位置发生了根本的改变。
而拖线阵声呐是将一定间隔的水听器,以线列阵型式布置到具有中性浮力的透声保护导管内,在基阵阵型上和传统拖曳变深声呐有本质区别。
拖线阵的声学段前后还分别有仪表段、数字段、隔振段、稳定尾绳和拖缆等,结构上和传统的拖曳变深声呐也存在很大差异。
拖线阵声呐相比壳体声呐和传统拖曳变深声呐,在探测性能上有着显著的优势,具体概括大致有以下几方面:声阵配置不受舰体布置条件限制,声阵孔径大、工作频率低、探测距离远。
在水中低频声波的传播衰减小传播距离远,声呐要提高探测距离和探测性能,增大声阵孔径降低工作频率是最直接的方法。
但壳体声呐与传统的拖曳变深声呐,受到基阵布置空间的限制,声阵孔径难以进一步增大,工作频率无法进一步降低,声呐的探测距离和探测性能要进一步提升,已非常困难。
而拖线阵的声换能器以线列阵型式布置,并拖曳于舰体外,不受舰体和拖体布置空间的制约,水听器数量多声阵长度长声阵孔径大,可接受低频乃至甚低频声波,探测距离远远大于传统的壳体声呐和拖曳变深声呐。
声纳

声纳声呐就是利用水中声波对水下目标进行探测、定位和通信的电子设备,是水声学中应用最广泛、最重要的一种装置。
它是SONAR一词的“义音两顾”的译称(旧译为声纳),SONAR 是Sound Navigation and Ranging(声音导航测距)的缩写。
-声呐技术至今已有100年历史,它是1906年由英国海军的刘易斯•尼克森所发明。
他发明的第一部声呐仪是一种被动式的聆听装置,主要用来侦测冰山。
这种技术,到第一次世界大战时被应用到战场上,用来侦测潜藏在水底的潜水艇。
-目前,声呐是各国海军进行水下监视使用的主要技术,用于对水下目标进行探测、分类、定位和跟踪;进行水下通信和导航,保障舰艇、反潜飞机和反潜直升机的战术机动和水中武器的使用。
此外,声呐技术还广泛用于鱼雷制导、水雷引信,以及鱼群探测、海洋石油勘探、船舶导航、水下作业、水文测量和海底地质地貌的勘测等。
-有趣的是,声呐并非人类的专利,不少动物都有它们自己的“声呐”。
蝙蝠就用喉头发射每秒10-20次的超声脉冲而用耳朵接收其回波,借助这种“主动声呐”它可以探查到很细小的昆虫及0.1mm粗细的金属丝障碍物。
而飞蛾等昆虫也具有“被动声呐”,能清晰地听到40m以外的蝙蝠超声,因而往往得以逃避攻击。
然而有的蝙蝠能使用超出昆虫侦听范围的高频超声或低频超声,从而使捕捉昆虫的命中率仍然很高。
看来,动物也和人类一样进行着“声呐战”!海豚和鲸等海洋哺乳动物则拥有“水下声呐”,它们能产生一种十分确定的讯号探寻食物和相互通迅。
-海豚声呐的灵敏度很高,能发现几米以外直径0.2mm的金属丝和直径lmm的尼龙绳,能区别开只相差200卜s时间的两个信号,能发现几百米外的鱼群,能遮住眼睛在插满竹竿的水池子中灵活迅速地穿行而不会碰到竹竿;海豚声呐的“目标识别”能力很强,不但能识别不同的鱼类,区分开黄铜、铝、电木、塑料等不同的物质材料,还能区分开自己发声的回波和人们录下它的声音而重放的声波;海豚声呐的抗干扰能力也是惊人的,如果有噪声干扰,它会提高叫声的强度盖过噪声,以使自己的判断不受影响;而且,海豚声呐还具有感情表达能力,已经证实海豚是一种有“语言”的动物,它们的“交谈”正是通过其声呐系统。
水面舰艇编队拖曳声纳舰阵位配置及行动方法
条件 、 战对象 、 队反潜 兵力 装 备性 能等 因素综 合确 定 。 作 编
通常按照多层次 、 大纵 深 、 梯次配置原则 配置兵力 , 将反潜警 戒区从里到外划分为三层警戒 区[ : 2 ] 1 直接警 戒区一 由掩 护幕舰艇 和舰 载反潜直 升机进行 )
一
定长度拖缆入水 , 然后调整舰艇速度至搜 索航速使拖 曳阵
稳定在合适 的深度 , 曳阵会 持续 一段 时间进 行稳 定 . 后 拖 然
拖 曳 声 纳 就 可 以正 式 工 作 . 拖 曳 阵 从 稳 定 时 起 直 至 高 速 航 令
内。在航渡中 , 近程拖曳声纳舰配置原则如下 l : 3 ]
行 平 均 速 度 为 V 为 了计 算 的方 便 , 拖 曳 声 纳 舰 收 放 拖 缆 ; 令
4 便 于协同作 战和攻 防转换 。由于拖 曳声 纳舰数 量和 ) 搜索范 围有限 . 其必须与反潜直升机 等其它反潜兵 力密切配 合协同反潜 , 且各反潜兵力配置需考虑 由攻潜转人 防潜或 由 防潜转入攻潜对队形的要求 . 保障编 队能迅速实现 攻防作战
关键 词 : 面舰 艇 编 队 ; 曳声 纳 舰 ; 置 距 离 ; 动 方 法 水 拖 配 行 中 图 分 类 号 :9 5 E 2 文献标识码 : A
P0 ii n—dei i nd Ac in fTo d S na a s i st0 fn ng a to o we o r W r h p Fo r a e Fo c r a i n r Su f c r e Fo m to
1 引言
水面舰艇编 队是海 军兵力 行动 的 主要形式 。根 据任 务 的不 同, 编队通常 以某 一艘 或数艘 舰艇 为核 心 , 遂行 各类 作 战任务 。但是在现 代 战争 中。 随着 新科 技在 潜艇 上的 应用 , 潜艇战斗能力 和生 存能 力在 逐步提 高 . 尤其 是核 潜艇 , 水 对 面舰艇编 队构成 的威胁 已经越来 越严重 _ 。 目前 , 型核 潜 1 ] 新 艇的速度 已经与水 面舰艇不 相上下 . 占领攻击 阵位变得 十 其 分容易甚至可 以实 施 多次攻 击 , 而且 随着射 程远 、 度高 的 精 潜射 导弹不断服役 . 对潜防御就成为水 面舰艇编 队在执行 任 何 任务时必须考 虑 的重 点 。为 了有 效保 护编 队核心 舰艇 的 安全 , 队航 渡中的反 潜警 戒 区一 般分 为远 程警 戒 、 编 近程 警
低频声纳

低频声纳声纳是利用在海洋中传播的声波来探测目标并对目标进行定位、识别和跟踪的。
声纳技术是指各国海军为提高声纳的探测效能而开发和应用的技术。
一、20世纪声纳装备发展概述人类社会两次残酷的世界大战都发生在20世纪。
一战期间为了对付德国人的潜艇攻击,各国海军考虑了许多方法探测水下潜艇。
其中包括热、磁、电磁以及声的方法,只有声探测方法有效。
从此,声信息进入了海战场最雏形的信息战。
最早出现的声纳是达?芬奇管式的被动舰壳声纳和拖曳声纳,具有对目标的估距能力。
为了适应武器设计高精度定位的需要,一战末期开发了主动回声测距声纳(战后投入使用),所用的电声换能器是朗之万式压电晶体换能器。
声纳装备至今已有八十年以上的发展史。
一战之后,各国加紧了声纳的研究进程。
其中美、英等国重点发展主动声纳,德国则主要发展被动声纳。
在此期间,对声纳设计有重要关系的传播介质的认识(主要是声速梯度)及假设检验与估计理论的应用提到了各国海军的议事日程之上。
二战和战后冷战时期的迫切需求进一步促进了声纳装备的发展。
美国人把水声与雷达、原子弹并列为三大发展计划。
水声传播、噪音、混响、反射的理论和实验研究工作广泛展开,特别是在用计算机解声传播方程方面的研究成果解决了声纳系统设计的水声建模难题。
包括主动辐射器和被动水听器在内的水下电声换能器技术取得长足的进步,大大促进了声纳装备的发展。
在声纳开发的起步阶段先后研制成功了电晶体材料和磁致伸缩(利用电磁效应)材料的换能器,后来又开发了压电陶瓷材料的换能器,至今仍广泛使用。
近年来又涌现出各种新材料和新概念,如新磁致伸缩材料(稀土-铁磁致伸缩等)、复合材料、压电聚合物、光纤水听器等。
60年代末到70年代初诞生了全数字声纳处理系统。
核潜艇的出现及其发射远程弹道导弹的能力,使得短距离主动声纳已不能满足探测潜艇的要求,各国海军转而发展被动声纳以保证远距离探测与识别水下目标。
低频和大孔径成为这一时期研制远距离探测声纳的发展方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
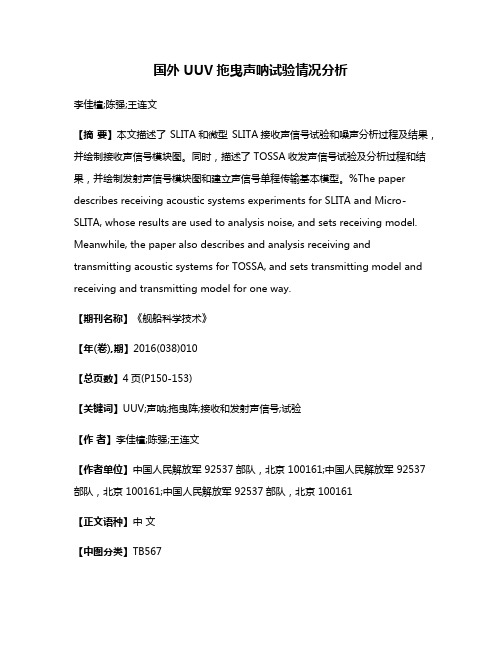
图 1 拖曳线列阵声纳工作场景示意图 [2 ]
被动式拖曳线列阵声纳通常由以下几个部分组成 :
3 中国科学院知识创新工程资助项目 2005 - 11 - 14收到初稿 , 2006 - 2 - 10修回
通讯联系人. Email: yhb@ocean. ioa. ac. cn
·420·
http: ΠΠwww. wuli. ac. cn 物理
将这 N 路信号相加便得到 N s ( t) , 再平方积分得到
N
2σ2 s
(这里
σ2 s
为信号功率
)
, 如果改变信号入射的
方向 ,那么第
i个水听器的信号经延时
τ i
(θ)
就变成
s[ t +τi (θ)
-
τ i
(θ0
)
],系统输出能量最大 ,即
N
∑ D (θ) = E [ (
s ( t +τi (θ)
Abstract Towed line array sonar ( TLAS) has been p laying an important role in anti - submarine warfare. The p rincip le, characteristics and configurations of TLAS are briefly introduced. The history of TLAS from the insp ira2 tion of H. C. duringWorld W ar I to the‘thin array’of J. R. Potter in 2000 is reviewed, and it is p redicted that future TLAS will be composed of passive and active modulated multip le arrays with fiber2op tic hydrophones and new acoustic sources, and will be capable of locating targets in 32dimensions. Keywords towed line array, sonar, submarine detection, anti2submarine warfare
同时在潜用拖线阵声纳方面 , Huges飞机公司 (Huges A ircraft Company, HAC)于 20世纪 60年代 中期获得了一份合同 ,在快速攻击潜艇上进行了拖 曳线列阵声纳的适装性试验. 在 20 世纪 60年代晚 期 ,由于前苏联安静型潜艇的出现 ,美国海军海上系 统司令部决定在所有的攻击型潜艇上装备拖曳线列 阵声纳.
1 前言
声波是人类迄今已知的唯一能在海水中远距离 传输的能量形式 ,其他能量辐射形式 ,如光波和电磁 波都不能在海水中远距离传输 [ 1 ]. 因此 ,人们一直 利用声波对水下或者水面的固定或运动目标进行导 航 、定位 、跟踪和识别 ,具有这种功能的设备称为声 纳或水声设备.
拖曳线列阵声纳拖曳距舰船尾部一定距离的声 接收系统 (通常称为线列阵 ) ,通过接收航行目标自 身辐射的噪声或者通过接收目标反射回来的主动信 号的回波 ,来检测目标的有无并估计目标有关参数.
(4)信号处理系统 :用于处理各种信息 ,实现对 目标的检测及有关参数的估计 ;
(5)显示控制系统 : 用于将信号处理系统处理 的结果进行显示 ,与其他系统进行信息交换 ,并将控 制命令下发给有关系统 ;
(6)数据记录系统 :将各种数据进行存储. 主被动联合式拖曳线列阵声纳则还有发射换能 器基阵 、相应的拖曳收放系统及发射机. 图 1是拖曳线列阵声纳工作场景的示意图 ,其 中在船尾拖曳的即是拖曳线列阵声纳的线列阵 ,而 在船底吊放的则是发射换能器阵 ,其余设备均在甲 板上或者舱室中. 拖曳式线列阵声纳区别于安装在舰艇外壳上的 舰壳声纳的优点在于 : ( 1)拖曳线列阵声纳将接收 声波的拖线阵远离工作母船 ,显著减小了拖曳平台 噪声的影响 ,能显著提高接收信噪比 ,达到提高声纳 检测能力的目的 ; ( 2 )拖曳线列阵声纳中的拖线阵 规模不受舰船尺寸的限制 ,可以安装较之舰壳声纳 更多的水听器 ,充分利用了海洋中信号和噪声不同 的统计特性 ,有效地提高声纳的检测性能 ; ( 3)可以 利用在海洋中传播损失较小而且是水面和水下目标 辐射噪声中重要成分的低频信号进行检测. 由于以上优点 ,拖曳线列阵声纳出现后受到广 泛关注 ,经过多年的发展 ,已经成为各国海军对日益 安静的潜艇进行有效检测的重要装备 [ 3 ] ,不妨称其 为探潜先锋.
Towed line array sonar spearheads submar ine detection
YU Hua2B ing SUN Chang2Yu L I Q i2Hu
( Institute of acoustics, Ch inese A cadem y of S ciences, B eijing 100080, China)
一时刻收到的不同信号 ,经过与方位相关的时间补 偿处理 ,再通过能量积累 ,得到输出能量最大的方向 就是目标到达的方向.
图 2 等间隔线列阵水听器之间时延差计算 ( H1 , H2 , …H i , … HN - 1 , HN 为间距固定的 N 个水听器 )
如图 2所示 ,拖曳线列阵声纳的线列阵中的声
至此拖曳线列阵声纳已经完成从概念到声纳的 试验过程 ,从 1968年开始 ,拖曳线列阵声纳开始为 大家接受 ,并逐渐扩大了应用的范围 ,成为水面舰艇 和潜艇的重要装备.
1968年 ,美国海军水声实验室 (U. S. Naval Un2 derwater Sound Laboratory, USNUSL )提出过渡型拖 曳线列阵警戒系统 AN / SQR - 14 的战技指标. C IC 经过大约 14个月的努力 ,于 1970年交付使用. 在地 中海投入使用后 , 该声纳工作非常出色. 1972 年 , C IC获得了五台 AN / SQR - 14的改进型 AN / SQR 15的订货.
·421·
声纳技术及其应用专题
正是按照这个间距来布放的 ;水听器的数目如果越 多 ,那么获得的增益就越大 ,对目标的探测能力就越 强 ,这也正是拖曳线列阵声纳孔径 (拖线阵长度 )越 来越大的原因.
3 拖曳线列阵声纳发展历史
拖曳线列阵声纳的历史可以追溯到第一次世界 大战 ,它的发展先后经历了三个阶段 ,即试验阶段 、 接受阶段和发展阶段 [ 5 ].
该声纳可以分为两类 ,即被动式和主被动联合 式. 被动式拖曳线列阵声纳仅通过接收到的目标辐 射噪声来进行探测 ,具有较好的隐蔽性 ,它可以由水 面舰艇 ,也可以由潜艇拖曳 ;而主被动联合式拖曳线 列阵声纳既可以利用被动接收到的目标辐射噪声进
行探测 ,又可以通过主动发射信号经目标反射后的 回波信号来进行检测 ,是探测辐射噪声日益降低的 潜艇的重要手段 ,通常由水面舰艇拖曳.
-
τ i
(θ0 )
)2
].
i =1
如果考虑信号中混有噪声 ni ( t) ( i = 1, 2 …,
N ) , ni ( t) 之间相互独立 ,且它们的均值为 0,这时系
统输出能量 D (θ)最大 ,
N
N
∑ ∑ D (θ) =E[
s(t
+τi (θ)-来自τ i(θ0)
+
ni
(t
-
τ i
(θ0
)
)2
战后拖曳线列阵声纳的 研究 一度 停滞 , 直到 1940年 ,丹麦的 Holm C 为美国海军研制了同时在 商船后面拖曳的双线阵声纳 ,该声纳具有鱼雷报警 功能. 在 20世纪 50年代后期 ,美国海军研究办公室 的 Lasky M 又继续了 Hayes博士的工作 ,先后进行 了一系列相关的试验 ,其中包括小外径且与电缆类 似的拖线阵声纳及安装在柔性橡胶套管中的三基元 线列阵声纳.
声纳技术及其应用专题
(1)线列阵 : 用于接收目标的辐射噪声和目标 回波 ,它由若干个拾取水下声学信号的水听器按照 一定的间距布放 ,并采取隔振措施 ,配备用于水下姿 态监视的传感器模块 ;
(2)拖曳收放系统 :用于拖曳 、布放和回收线列 阵 ,包括拖缆和绞车 ;
(3)深度 、航向监视系统 :用于监视拖线阵在水 下的深度 、温度 、航向等信息 ;
2 拖曳线列阵声纳工作原理
众所周知 ,人的两只耳朵具有定向功能 ,当要判 断一个声源的方向时 ,总是把头转向声源的方向 ,使 得声源正好处于两只耳朵连线的垂直平分线方向 上 ,声音能够同时到达两只耳朵 ,这实际上是一种简 单的定向原理 ———最大声压定向法 [ 4 ]. 拖曳线列阵 声纳就是利用类似的原理来进行工作的 ,它充分利 用噪声和信号的不同统计特性 ,将多个水听器在同
学模块由 N 个水听器组成 , 以平面上的某一点为参
考点 ,设入射信号为 s ( t) , 经过海洋传播 , 到达第 i
个水听器的信号为
s
(
t
+τi
(θ0
)
)
, 这里
θ 0
为信号的
入射角.
如果将这一路信号延时
τ i
(θ0
)
(此延时和
信号入射方向有对应关系 , 通过此延时能给出信号
的入射方向 ) ,那么对所有 N 路信号都会变成 s ( t) ,
在 20世纪 60年代早期 ,美国海军的潜艇的艇 长们遇到一个问题 :由于其他设备的阻挡 ,在舰尾部 有声盲区. 为了消除这个声盲区 ,贝尔电话实验室 (B ell Telephone Laboratory, B TL ) 和 Chesapeake 仪 器公司 ( Chesapeake Instrument Corporation, C IC )分 别提出了不同的方案. BTL 提出在导弹发射管中存 储并在潜艇下方拖曳的拖曳线列阵声纳 ,而 C IC则 采用在舰桥上进行拖曳的方式. 试验证明 ,前者对目 标的探测距离超过了 36km ,而后者对同一目标的探 测距离也达到了 9km. 随后 C IC利用自研的线列阵 , 并从海军借到 AN /AQA - 2 声纳及有关处理设备 , 检测到了 100多公里外的潜艇目标 ,取得了巨大成 功.