ABB涡轮增压器中文版
ABB涡轮增压器中文版

什么是喘振 & 为什么会有喘振
喘振是当压力同流量不能相互维持时发生的一种现象 当阶段不稳定发展成整个系统的不稳定时,喘振就会发生 当临界操作状态与设计标准不符时,会导致系统不稳定而
发生喘振 在环境/产品条件上发生显著变化时(同增压器和柴油机
相关的系统),就会导致喘振
ABB涡轮增压器中文版
(试验台或实际使用中以额定转速110%的速度运转不能超过10小时)
t (2)实际操作中最高转速:nBmax , Bmax
ABB涡轮增压器中文版
VTR..4型涡轮增压器名牌中额定转速示意
使用期限(单位1000小时) (3)轴承 (4)叶轮 (5)带透平叶片的转子轴
ABB涡轮增压器中文版
涡轮增压器详解:
500 - 1800KW
新增压器型号
至1999年产量:409 台 总产量:> 750 台 长:113 – 380 CM 重: 520 – 13200 KG 增压功率: 1250 – 25000 KW
至1999年产量:1397 台 总产量:> 2000 台 长: 35-65 CM 重: 80 – 400 KG 增压功率: 500 – 3000 KW
ABB涡轮增压器中文版
增压器型号对比
ABB涡轮增压器中文版
增压器型号对比
E – 高增压 P – 高效率 D – 高增压高效率
ABB涡轮增压器中文版
VTR..4型涡轮增压器名牌中额定转速示意
涡轮增压器的最大转速[rps]和最高废气排气温度[℃]:
(1)额定转速nMmax & 最高废气排气温度tMmax
ABB涡轮增压器中文版
概述
涡轮增压器的喘振原因可分为三类: 1. 空气/废气系统阻塞、流道不畅 2. 柴油机燃油系统故障 3. 发动机负荷快速变更
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
ABB机器人操作手册(中文版)[8]
![ABB机器人操作手册(中文版)[8]](https://img.taocdn.com/s3/m/02be8b70c950ad02de80d4d8d15abe23482f0308.png)
ABB机器人操作手册(中文版)ABB操作手册(中文版)一、概述ABB是一种高性能、高可靠性、高灵活性的工业,广泛应用于汽车、电子、机械、化工、食品等行业的生产和加工过程中。
ABB可以实现多种功能,如焊接、切割、装配、搬运、喷涂、打磨等。
ABB由控制柜、操作盘、机械臂和末端执行器等部件组成,通过编程和控制系统实现各种动作和任务。
二、安全在安装、调试、操作和维护ABB时,用户必须遵守ABB公司和当地法律法规的相关要求,并采取必要的安全措施,如穿戴防护服装和设备,设置安全区域和警示标志,关闭电源和气源等。
在安装、调试、操作和维护ABB时,用户必须注意观察的运行状态和周围环境,并随时准备停止或紧急停止的运行,以防止发生危险或故障。
在安装、调试、操作和维护ABB时,用户必须避免与发生碰撞或挤压,并保持一定的距离,以防止受伤或损坏设备。
在安装、调试、操作和维护ABB时,用户必须禁止未经授权或培训的人员接近或触摸或其相关部件,并对其进行监督或指导。
在安装、调试、操作和维护ABB时,用户必须按照规定的程序和步骤进行,并避免任意修改或更改设备的参数或设置。
在安装、调试、操作和维护ABB时,用户必须定期检查设备的清洁度和完好度,并及时更换或修理损坏或磨损的部件。
如果用户在使用ABB时发现任何异常或故障,请立即停止设备的运行,并连系ABB公司或其授权的服务商进行处理。
三、结构控制柜:控制柜是ABB的核心部件,负责接收和处理来自操作盘或其他外部设备的信号,控制的运动和功能,以及监测的状态和故障。
控制柜内部包含有电源模块、主控板、驱动板、通讯板、接口板等组件,以及风扇、过滤网等附件。
控制柜通常安装在的附近或远处的一个固定的位置,与通过电缆连接。
操作盘:操作盘是ABB的人机交互部件,负责向用户提供的操作界面和信息显示。
操作盘上有一个液晶显示屏,用于显示的状态、参数、程序和菜单等内容,以及一些按键和旋钮,用于输入命令、选择选项、调整数值等操作。
(完整版)关于汽车的零部件名称中英文大全
关于汽车的零部件名称中英文大全座杆束SeatPostClamp座杆SeatPost座垫套SaddleCover座垫Seat座垫Saddles自行车类Bicycle自排车用滤油器OilFilterforAutomaticTransmission自排变速箱修理包AutomaticTransmissionGasketKits自动变速箱油AutomaticTransmissionOil装饰贴纸、标志OrnamentMark转向总成SteeringAssembly转向主干SteeringStemComp转向连杆SteeringLinkage转向节臂Knuckle转向机柱SteeringColumn转向齿轮箱SteeringGearBox铸造件(加工)CastingParts(Processing)主轴、副轴Mainshaft/Countershaft主脚架MainStand主滑动模轮组件PrimarySheaveAssembly轴承Bearing中轴组件(天心)BottomBracketParts中央置物箱Console中央门控CentralDoorLock中心盖CenterCover置物袋CarriageBag趾夹带ToeStrap止推垫片ThrustWasher支柱总成StrutAssembly支架Bracket整流器Rectifier整车FinishedMotorcycle整车FinishedBicycle蒸发器Evaporator折叠式自行车FoldingBicycle遮阳板Sunvisor运钞车ArmorCashCarrier越野车TrekkingBicycle预热塞GlowPlug雨刷及雨刷连杆Wiper/Linkage油压感应器OilPressureSensor油箱浮筒TankFloat油箱浮筒GaugeFuelTank油箱FuelTank油土与基准模型ClayModelandMasterModel 油土及基准模型ClayModelandMasterModel 油品添加剂OilAdditive油量表FuelGauge油管FuelPipe油封OilSeal油底壳OilPan油杯FuelCupAssembly油帮浦OilPump引擎支撑EngineMounting引擎罩盖AirShroud/Cylinder引擎修理包EngineGasketKits引擎零件EngineParts引擎盖铰链HingeofEngineHood引擎盖EngineHood引擎盖EngineCover引擎波司EngineBush引擎Engine音响喇叭盖SpeakerCover仪表饰板InstrumentPanelGarnish仪表板支架InstrumentalPanelMounting 仪表板InstrumentPanel仪表Meter仪表CombinationMeter一般自行车RegularBicycle液压式刹车器HydraulicBrake液罐车RefuelingTruck曳引车TractorTruck曳力杆TrailingArm叶子板Fender叶片弹簧LeafSpring摇臂轴RockerArmShaft摇臂RockerArm烟灰缸Ashtray压条Moulding悬臂式刹车器CantileverBrake修理业Repairing&Maintenance休旅车 RecreationalVehicle(RV)行李箱铰链HingeofTrunkLid行李箱盖TrunkLid行李箱LuggageBox协力车TandemBicycle小型商用车(3.5吨以下) LightDutyCommercialCar(LessThan3.5Tons) 消音器ExhaustMuffler消防车FireFightingTruck橡胶件RubberParts下臂LowerArm洗涤壶WindshieldWasher五通管5-wayPipe无线电胎压侦测仪WirelessTireMonitor无链式自行车ChainlessBicycle无段自动变速系统C.V.T.握把Grip涡轮增压器Turbo-Supercharger温度记录器TemperatureRecorder温度感应器WaterTemperatureSensor外装品ExteriorParts瓦斯车LPGCar拖车Trailer拖板车PalletTruck涂料Paints凸轮轴链条CamChain凸轮轴链轮SprocketCamshaft凸轮轴Camshaft凸轮链条张力器CamChainTensioner凸轮Cam头盔Helmet铜套类Bushing停车支架Kickstand铁路扣夹ClipforRailroad铁路车辆制造及修理RailroadVehicleManufacture&Repair铁路车辆零件RailroadVehicleParts铁路车辆类RailroadVehicle贴纸Sticker天线Antenna天窗SunRoof提速器Actuator碳刷CarbonBrush胎压不足警示器TireLowPressureIndicator踏板Pedal锁Lock随车工具Tools塑料件PlasticParts速度表SpeedMeter水箱支架RadiatorMounting水箱水管RadiatorHose水箱饰罩RadiatorGrille水箱风扇RadiatorFan水箱Radiator水壶架BottleCage水管WaterHose水帮浦WaterPump双面胶带AcrylicFoamTape竖管Stem手刹车拉柄ParkingBrakeLever室内运动车(健身车)Exerciser室内镜RoomMirror饰板/饰条Garnish/Trim时规炼条/皮带外盖TimingChain/BeltCover时规炼条/皮带TimingChain/Belt省电器EnergySavingUnit生产、检测及涂装设备Production,Test&PaintingEquipment 生产、检测及涂装设备Production,Test&Painting Equipment 生产、检测及涂装设备 Production,Test&Painting Equipment 舌簧阀ReedValve上臂UpperArm闪光器Flasher闪光灯Flasher煞车踏板BrakePedal刹车总成BrakeAssembly刹车总泵BrakeMasterCylinder刹车真空管BrakeBoostVacuumTube刹车真空倍力器BrakeVacuumBooster刹车油管(硬)BrakeTube刹车油管(软)BrakeHose刹车踏板BrakePedal刹车盘BrakeDisk刹车来令片BrakeShoe刹车来令片BrakeLiningShoe刹车鼓BrakeDrum刹车分泵BrakeCylinder散装车BulkTruck三通管3-wayPipe三轮车Tricycle润滑系统LubricationSystem人造革ArtificialLeather热水阀HeaterValve热处理HeatTreatment扰流板Spoiler燃油滤清器FuelStrainerAssembly燃油滤清器FuelFilter燃油管FuelPipe燃油帮浦FuelPump燃料系统FuelingSystem曲轴轴承片CrankshaftBearing曲轴肖CrankShaftPin曲轴箱盖CrankcaseCover曲轴箱Crankcase曲轴皮带盘CrankshaftPulley曲轴Crankshaft曲柄组Chainwheel&Crank球形接头BallJoint倾卸车DumperTruck前护盖FrontFender前防撞杆GuardAssy(Front)前叉肩ForkCrown前叉顶梁ForkTopBridge前叉FrontFork千斤顶Jack汽门座ValveSeat汽门摇臂盖RockerCover汽门摇臂ValveArm汽门锁ValveCotter汽门导管ValveGuide汽门弹簧ValveSpring汽门Valve汽缸头侧盖CylinderHeadSideCover汽缸头CylinderHead汽缸头(盖)CylinderHead汽缸体CylinderBlock汽缸衬套CylinderLiner汽缸Cylinder汽车用液晶显示器CarLCD汽车用行动电话CarHand-freeMobilePhone汽车用计算机CarComputer汽车用光盘CarCD汽车用电子钟DigitalClock汽车音响CarAudio汽车清洁保养用品CosmeticsforAutomobile汽车内装用牛皮LeatherforCarInterior汽车导航系统CarNavigationSystem汽车保全系统CarSecuritySystem其它特种自行车OtherSpecial-purposeBicycles其它电动辅助车辆OtherElectricAuxiliary Vehicles 其它Others平衡杆StabilizerBar皮带张力器Tensioner喷油嘴InjectionNozzle配线WireHarness配件Accessories跑车(自由车)RacingBicycle排气消音器ExhaustMuffler排气歧管ExhaustManifold排气管ExhaustPipe排档头Knob排档杆ShiftLever暖气总成HeaterAssembly扭力杆TorsionBar尼龙绳、特多龙绳NylonRope内装品InteriorParts内胎(含内衬)InnerTire(Flap)模、夹、治、检具Die,Fixture,Jig,Checking,Gauge 模、夹、治、检具Die,Fixture,Jig,Checking Gauge 模、夹、治、检具Die,Fixture,Jig&CheckingGauge 铭板Nameplate门饰板DoorTrim门框Sash门铰链DoorHinge马达轴MotorAxle马达零件MotorComponents马达类Motor螺旋弹簧CoilSpring螺帽/螺栓/螺丝Nut/Bolt/Screw轮胎汽门嘴TireValve轮胎Tire轮圈盖WheelCover轮圈WheelDisk轮圈Rim轮弧FenderTrim轮毂WheelHub滤清器类Filter滤清器Filter零组件用材料ComponentsMaterials铃Bell链条盖ChainCase链条Chain链盖ChainCover炼条调整器Tensioner连杆轴承片ConnectingRodBearing连杆ConnectingRod离合器座ClutchPlate离合器总成ClutchAssembly离合器总泵ClutchMasterCylinder离合器外壳ClutchCase离合器释放轴承ClutchReleaseBearing离合器片ClutchDisc离合器来令片ClutchLining离合器杆ClutchLever离合器分泵ClutchCylinder离合器Clutch冷却系统CoolingSystem冷却风扇CoolingFan冷气总成A/CAssembly冷气压缩机A/CCompressor冷气配管A/CHose冷气客车Air-ConditionedCar冷气导风管A/CDuct冷凝器A/CCondenser冷煤电磁阀RefrigerateSolenoidvalve冷媒管A/CPipe冷冻车FreezerCar篮Basket喇叭Horn拉杆HandleLever快拆QuickRelease扣具CargoLash控制拉线ControlCable孔塞GrommetPlug空气清净机AirPurifier空气滤蕊AirCleanerElement空气滤清器盖AirCleanerCover空气滤清器导管AirIntakeTube空气滤清器AirCleaner空调相关零件A/CRelatedComponents空调系统Air-conditioningSystem空调滤网A/CFilter开关类Switch镜类Mirror进气歧管IntakeManifold金属表面处理(材料)MetalSurfaceTreatment(Material) 节温器Thermostat节流阀ThrottleValve节流把手ThrottleGrip接头Lug&Shell轿车 PassengerCar搅拌车MixerTruck脚踏起动机杆KickStarter脚踏杆KickCrankAssembly脚踏板Pedal脚踏板Board/Footrest脚刹车器CoasterBrake交流发电机(零件)A.C.Generator(Components) 夹式刹车器CaliperBrake夹器固定座Pivot夹片、管束Clamp,Clip继电器Relay机油滤网OilStrainer机油滤清器OilFilter机油冷却器OilCooler机油浮筒OilFloat机油尺导管OilLevelGaugeTube机油尺OilLevelGauge机油帮浦OilPump机油EngineOil机车座垫用牛皮LeatherforMotorcycleSeat机车链轮Chain机车类Motorcycle货架LuggageCarrier火星塞盖PlugCover火星塞SparkPlug活性碳罐Canister活塞肖PistonPin活塞环PistonRing活塞衬套PistonLiner活塞Piston环境卫生车GarbageTruck化油器Carburetor花鼓Hub&FreeHub后轴总成RearAxleAssembly后置物板RearParcelShelf后悬吊系统RearSuspension后视镜RearMirror后视镜DoorMirror后视镜BackMirror后轮驱动座RearWheelDriveSeat后架Carrier后防撞杆GrardAssy(Rear)后叉端RearForkEnd后舱室饰板RearTrunkTrim横梁CrossMember横拉杆接头Tie-RodEnd黑烟过滤器DieselParticleFilter合成木材SyntheticWood海滩车BeachBicycle孩童车JunvenilesBicycle管类TubeorPipe管类Pipe,Hose,Tube故障标志Reflector鼓式刹车盘BrakeDrum鼓风机BlowerAssembly鼓、碟式刹车器Drum/DiscBrakeAssembly 共鸣箱Resonator工具Tool各类孔盖Cap、Cover各类隔音垫AllKindsofSilencer隔热材HeatInsulator高压线组IgnitionCable副水箱AuxiliaryRadiator辅助气囊AirBag辅助轮TrainingWheel辅助把手BarEnd辐条/辐帽Spoke/Nipple蜂鸣器Buzzer风扇盖AirShroud风扇Fan粉末冶金PowderMetallurgy分电盘Distributor废气回收管EGRTube飞轮环齿轮RingGearofFlywheel飞轮Flywheel防撞护垫BumperPad防水衬条Weatherstrip防盗器CarBurglarAlarm防盗器BurglarAlarm方向盘SteeringWheel方向把手SteeringHandle反光片Reflector发电机Alternator发电机(零件)Alternator(Components)多功能休闲车ATV堆高机Forklift锻造件(加工)ForgingParts(Processing)端子Terminal动力转向油管PowerSteeringHose动力转向帮浦PowerSteeringPump动力方向系统PowerSteeringSystem定趾器ToeClip定速器CruiseController顶蓬Headlining碟式刹车器DiskBrake碟式刹车盘BrakeDisc调整器Regulator调节器Regulator吊架Hanger垫片类Seal、Gasket、Washer、Packing垫片Gasket电子件ElectricalParts电子点火器IgnitionModule电装品ElectricalParts电圈Starter电瓶Battery电动座椅装置PowerSeatUnit电动自行车马达ElectricBicycleMotor电动自行车控制器ElectricBicycleDriver电动自行车电路设计ElectricBicycleCircuit Design 电动自行车电池组ElectricBicycleBatterySet电动自行车ElectricalBicycle电动机车控制器ElectricMotorcycleDriver电动机车ElectricMotorcycle电灯Dynamo/LightingSet电磁阀SolenoidValve电池容量计BatteryCapacityIndicator电池充电器BatteryCharger点烟器CigarLighter点火线圈模块IgnitionCoilModule点火线圈IgnitionCoil地毯FloorMat地毯Carpet底盘系统ChassisSystem底盘及其另件ChassisandRelatedParts底盘车架Frame底盘车ChasisTruck等速接头C.V.Joint登山车MountainBicycle灯泡Bulb灯类Lamp倒车显示器RearViewDisplay倒车雷达ReverseSensor导线Cable档位调整器GearPositionIndicator挡泥板MudGuard/Fender挡泥板MudGuard挡泥板Fender弹簧Spring单轮车Unicycle大型商用车(3.5吨以上) HeavyDutyCommercialCar(MoreThan3.5Tons) 打气筒FloorPump打蜡机Buffer(CarPolisher)传动轴总成SecondarySheaveAssembly传动轴TransmissionAxle传动轴PropellerShaft传动件Transmission触媒转换器缓冲绵CatalyticConverterMate触媒转化器CatalyticConverter储液瓶A/CReceiver充电器Charger齿条GearRack齿轮轴GearAxle齿轮箱GearBox齿轮衬套GearBushing齿轮变速零件GearShiftParts齿轮Gear城市车ATB车柱Pillar车用灭火器Extinguisher车头组件Headset车体及电装BodyandElectricalParts车体盖BodyCover车体打造(改装)CarBodyBuilding(Refitting)车体Body车手带HandleStrap车身护条SideProtector车身钣金件Body&StampingParts车身CarBody车门锁DoorLock车门扶手DoorArmrest车门把手DoorHandle车门DoorPanel车轮系统WheelingSystem车轮及刹车WheelandBrake车架材料FrameMaterials车架Frame车顶内衬RoofLining车顶板Roof车灯控制器LightingController车窗升降摇柄WindowLifterHandle车窗升降机WindowLifter柴油车黑烟净化器DieselParticulateFilter插接件ConnectorClip侧脚架SideStand侧盖SideCover残障专用车MotorcycleforHandicap补强板ReinforcementPlate玻璃类Glass玻璃滑槽GlassRun波司垫片Washer变速箱外壳TransmissionCase变速箱TransmissionBox变速器Derailleur变速杆ShiftLever避震前叉SuspensionFork避震器前后活塞杆PistonRodofFrontandRearShockAbsorber 避震器前后活塞杆PistonRodofFrontandRear ShockAbsorber 避震器ShockAbsorber避震脚踏车SuspensionBicycle比例阀ProportionalValve备胎板TrimforSpareTire保险丝座FuseSeat保险丝Fuse保险杆支撑MountofBumper保险杆Bumper帮浦类Pump钣金件StampingParts把手座GripHolder把手套Grip把手盖HandleCover把手HandleBar安全带SeatBeltYOKEASSY磁场总成WIRELEAD分电器引线WEIGHT离心块VAlVEP.C.V单向阀UOUSINGSUBASSY分电器外壳总成TANKWASHER清洗器电动机SWITCKCOlUMN灯光组合开关SWITCHASSY电磁开关总成SUPPORTASSYARM断电器总成STATORASSY发电机转子总成STARTERASSY起动机总成SPRINGGOVERNOR离心块弹簧SPEEDOMETER车速里程表SPEAKER扬声器SOCKETBULB仪表灯座SHAFT分电器轴SCREWSETTING大灯调整螺钉ROTORASSY分火头总成ROOMLAMP室内灯RINGRETAlNING大灯框RESISTORASSY附加电阻总成RELTIFIERASSY发电机整流器总成RELAYPOWE雨刮器继电器RELAYINTERMITTENTWIPER电源继电器RADIO收音机PULLEYASSY发电机皮带盘总成PLUGSPARK火花塞PANELINSTRUMENT仪表盘架PANELINDICATOR仪表指示灯面板MOTORWIPER雨刮器电动机MOTORWASHER清洗器电动机LINKWIPER雨刮器连杆LENSTURNSIGNlLAMP转向灯玻璃灯罩LED灯LEDLampLAMPKITREARCOMB尾灯总成LAMPKITLICENSE车牌灯总成LAMPKITFRONTTURNSIGNAL转向灯总成LAMPKITFRONTCOMBINATION前小灯总成ICREGUlATORASSY集成电路调节器总成IAMPASSYHEAD大灯总成HID车灯安定器组合HIDBallastCompleteSetforHeadlights HEADLAMPUNIT大灯芯GIASSMETER仪表玻璃GEARKIT分电器传动齿轮GAUGETEMP室内灯FUSE保险丝FLASHERUNITHAZARD转向灯闪光器DISTRIBUTORASSY分电器总成CONTROLLERSUBASSY真空点火提前装置CONDENSER电容器COIlASSYIGNITION点火线圈总成CLUTCHOVERRUNNING啮合器总成CLOCKDIGITAl数字钟CASEMETER仪表壳体CAPASSY分电器盖总成CAM分电器凸轮CAD/CAM车身设计CAD/CAMCarBodyDesign CABlESETSPARKPLUG高压线总成CABLEASSYHIGH中心高压线总成C.D.I.总成C.D.I.UnitAssembly BULBLAMP仪表灯BRUSH电刷BRACKETREAR起动机后端盖BRACKETASSYTRONT起动机前端盖BRACKETASSYREAR发电机后端盖总成BRACEALTERNATOR发电机调节杆件BOXASSYFUSE保险丝盒总成BOARDPRINTED仪表印刷电路BLADEASSY雨刮片总成BEARING轴承BEARINGREAR起动机启轴承BATTERY蓄电池ARMATURESET电枢总成ALTERNATORASSY交流发电机总成A/C风扇A/CFan50CC以下机车LessThan50CCMotorcycle50~150CC机车50~150CCMotorcycle150CC以上机车MoreThan150CCMotorcycle (电动)座椅(Electric)Seat(电动)滑板车(Electric)KickBoardScooter。
ABB RAPID语言参考手册(中文)
RAPID参考手册指令1.指令1.1.AccSet—降低加速度用途:当处理较大负载时使用AccSet指令。
它允许减慢加速度和减速度,使机器人有一个更平滑的运动。
该指令只能在主任务T_ROB1中使用,或者如果处于多运动系统,在Motion任务中。
基本范例:AccSet的基本范例说明如下。
例1AccSet 50,100;加速度备限制到正常值的50%。
例2AccSet 100,50;加速度斜线限制到正常值的50%。
项目:AccSet Acc RampAcc:数据类型:num(数值)加速度和减速度作为正常值的百分比。
100%对应最大加速度。
最大值:100%。
输入值<20%则给出最大加速度的20%。
Ramp数据类型:num(数值)加速度和减速度的增加作为正常值的百分比的比例(如图)。
通过减小这个数值可以限制震动。
100%对应最大比例。
最大值:100%,输入值<10%则给出最大比例的10%。
下图说明减小加速度可以平滑运动。
加速度加速度加速度时间时间时间AccSet 100,100 正常加速度AccSet 30,100 AccSet 100,30程序执行:该加速度值应用到机器人和外部轴,直到一个新的AccSet指令执行。
缺省值(100%)在以下情况是自动设置:●冷启动●加载了新的程序●从头开始执行程序时语法:AccSet [AccSet “:=”]<数值表达式(IN)>“,”[Ramp “:=”]<数值表达式(IN)>“;”相关信息:1.2.ActUnit—激活一个机械单元用途:ActUnit用来激活一个机械单元。
例如当使用普通驱动单元的时候,它可以用来决定哪一个单元被激活。
该指令只能在主任务T_ROB1中使用,或者如果处于多运动系统,在Motion任务中。
基本范例:ActUnit的基本范例说明如下:例1 ActUnit orbit_a;orbit_a机械单元的激活。
项目:AccUnit MechUnitMechUnit:机械单元数据类型:mecunit(机械单元)要激活的机械单元的名称。
一例abb vtr 160增压器喘振非常规故障的排除及原因分析
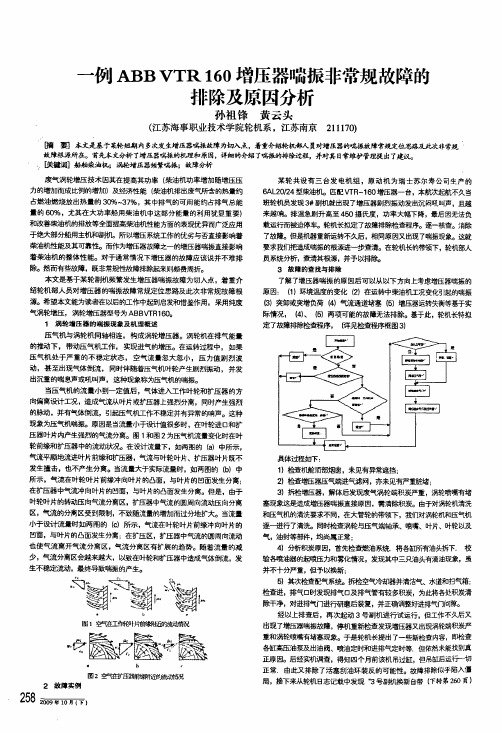
一例A B B V T R160增压器喘振非常规故障的排除及原因分析孙祖锋黄云头(江苏海事职业技术学院轮机系,江苏南京211170)【}i≮要】本文是基于采轮短期内多次发生增压器喘振故障为切八点,着重介绍轮机郝人员对增压器的喘振故障常规定位思路及此次非常规故障根源所在。
首先本文分析了增压器喘撅的机理和原因,详细的介绍了喘振的排除过程,并对其日常维护管理提出了建i‰瞎;睫潮船舶柴油机;涡轮增压器频繁喘振;故障分析废气涡轮增压技术因其在提高其功率(柴油机功率增加随增压压力的增加而成比例的增加)及经济性能(柴油机排出废气所含的热量约占燃油燃烧放出热量的300/o一37%,其中排气的可用能约占排气总能量的60%,尤其在大功率船用柴油机中这部分能量的利用犹显重要)和改善柴油机的排放等全面提高躬由机性能方面的表现优异而广泛应用于绝大部分船用主机和副机,所以增压系统工作的优劣与否直接影口向着柴油机性能及其可靠性。
而作为增压器故障之一的增压器喘振直接影响着柴油机的整体性能。
对于通常情况下增压器的故障应该说并不难排除。
然而有些故障,既非常规性故障排除起来则颇费周折。
本文是基于某轮副机频繁发生增压器喘振故障为切入点,着重介绍轮机部人员对增压器的喘振故障常规定位思路及此次非常规故障根源。
希望本文能为读者在以后的工作中起到启发和借鉴作用,采用纯废气涡轮增压,涡轮增压器型号为A B B V TR l6001涡轮增压器的喘振现象及机理概述压气机与涡轮机同轴相连,构成涡轮增压器。
涡轮机在排气能量的推动下,带动压气机工作,实现进气的增压。
在运转过程中,如果压气机处于严重的不稳定状态,空气流量忽大忽小,压力值剧烈波动,甚至出现气体倒流,同时伴随着压气机叶轮产生剧烈振动,并发出沉重的喘息声或吼叫声,这种现象称为压气机的喘振。
当压气机的流量小到一定值后,气体进入工作叶轮和扩压器的方向偏离设计工况,造成气流从叶片或扩压器上强烈分离,同时产生强烈的脉动,并有气体倒流,引起压气机工作不稳定并有异常的响声。
ABB机器人说明书中文版RAPID语言内核
1 简介
11
1.1 设计目标 .......................................................................................................... 11 1.2 语言摘要 .......................................................................................................... 12 1.3 语法表示法 ....................................................................................................... 16 1.4 错误分类 .......................................................................................................... 17
技术参考手册 RAPID语言内核
Trace back information: Workspace R15-2 version a20 Checked in 2015-10-22 Skribenta version 4.6.176
技术参考手册 RAPID语言内核
文档编号: 3HAC050946-010 修订: A
2 词汇元素
19
2.1 字符集 ............................................................................................................. 19 2.2 词法单元 .......................................................................................................... 20 2.3 标识符 ............................................................................................................. 21 2.4 保留字 ............................................................................................................. 22 2.5 数字文字 .......................................................................................................... 23 2.6 布尔文字 .......................................................................................................... 24 2.7 字符串文字 ....................................................................................................... 25 2.8 分隔符 ............................................................................................................. 26 2.9 占位符 ............................................................................................................. 27 2.10 备注 ................................................................................................................ 28 2.11 数据类型 .......................................................................................................... 29 2.12 数据类型的范围规则 ........................................................................................... 30 2.13 atomic数据类型 ................................................................................................. 31 2.14 record数据类型 ................................................................................................. 33 2.15 alias数据类型 .................................................................................................... 35 2.16 数据类型的值类型 .............................................................................................. 36 2.17 Equal型 ........................................................................................................... 38 2.18 数据声明 .......................................................................................................... 39 2.19 预定义数据对象 ................................................................................................. 41 2.20 数据对象的范围规则 ........................................................................................... 42 2.21 存储类别 .......................................................................................................... 43 2.22 变量声明 .......................................................................................................... 44 2.23 永久数据对象声明 .............................................................................................. 45 2.24 常量声明 .......................................................................................................... 47
ABB+TPS+48+增压器的保养和拆装
ABB TPS 48 增压器的保养和拆装杨忠良[内容提要]本文介绍了几例ABB TPS48增压器的损坏情况,并根据原因分析给出了科学的拆装和保养方法,供各位同行参考。
一、设备概况ABB TPS 48E 增压器是近年ABB公司开发的并成功匹配在WÄRTSILÄ 4L20副机上的增压器新系列产品,正常工作区域增压比为4.3-4.7(πc),涡轮效率(ηtc)可达65%以上,空气流量0.9-1.6立方米/秒,在副机110%负荷时的最高转速可达nMmax=1046转/秒(62760rpm),最高工作温度(透平前)tMmax=650℃,在副机全负荷时转速可达nBmax=993转/秒(59580rpm),最高允许工作温度(透平前)tBmax=620℃,该增压器轴承润滑和冷却使用副机系统油,要求使用的滑油滤器<34um,工作时要求滑油压力在2-4.5bar之间,启动时至少有0.3bar的滑油压力(即预润滑压力),废气涡轮和压气叶轮均可水洗。
二、故障介绍虽然该设备体积小,重量轻,部件数量少,拆检时不脱开排烟管就可拆出转子、轴承、喷嘴环等,但其维护保养要求较高,稍有不慎,就很容易造成转子和压气叶轮损坏,以下是我部船舶在短短二年内发生的几例损坏事故。
损坏事例一:某轮副机总运转时间18269小时。
损坏部件:转子和压气叶轮报废。
记录检查:从船上现有记录查知,该副机1998年12月16日,运转429小时,解体。
1999年6月22日,运转2267小时,解体,更新21002PISTON RING。
2000年12月16日,运转10216小时,解体,更新21002PISTON RING。
2001年9月27日,运转13183小时,解体,更新21002PISTON RING。
2003年1月15日,运转18269小时,解体。
(02年无记录,仅为滤网清洗)原因分析:因超长时间未解体转子总成和未更换PISTON RING(备件号21002),在该部件过度磨损情况下,油气封作用失效,轴承滑油脏污,轴承磨损,间隙增大,轴向窜动,致转子环槽磨损,压气叶轮碰壳磨坏,转子报废。
ABB IRB 140 工业机器人的中文名称说明书

Desde que hace más de 25 años desarrolló el primer robot industrial, ABB ha sido uno de los principalesactores en el campo de la automatización industrial por medio de robots. Los robots de ABB se utilizan en los sectores de automoción, fundición, bienes de consu-mo, metalurgia y plásticos. Un elemento común a todas estas aplicaciones en es que el trabajo es pesado, peligroso y/o repetitivo. Y en todos estos sectores se demanda más capacidad de producción y una calidad mejor y más uniforme de los productos.Sin embargo, a medida que la robótica industrial ha ido consiguiendo mayor aceptación se ha ido prestando más atención a tareas más ligeras como posi-ble objeto de aplicación de los robots. El nuevo IRB 140 de ABB da un nuevo paso dentro de esta tendencia. Con una altura de solo 80 cm y ocupando 40 x 45 cm de superficie de suelo, tiene capacidad para manipular 5 kg, dispone de 6 ejes de trabajo y tiene un gran alcance. De hecho,su alcance máximo es de 120 cm en altura y de 81 cm en su derredor. Puede oscilar360º y doblarse totalmente hacia atrás.Dichas características le convierten en uno de los robots más versátiles y con más capacidad de los existentes en el mercadoCon su velocidad de movimiento de 2,5 m/s, aceleración de 20 m/s 2y repetibi-lidad de posicionamiento de 0,03 mm, el nuevo robot es también, hasta dondellega nuestro conocimiento, más rápido y más preciso que cualquier otro de las mismas dimensiones.Las características anteriores, conjunta-mente con su flexibilidad de montaje (puede ser instalado sobre el suelo o en una pared, o incluso ser suspendido cabeza abajo), confieren al nuevo robot industrial IRB 140 unas ventajas queNew small robot broadens applications spectrumfor industrial automationKarl-Gunnar JohnssonIndustrial ITUn robot industrial lo suficientemente peque ño como para poder instalarlo en lugares con poco espacio, pero con una potencia que le permita manipular grandes cargas y una agilidad con la que supere a la mayor parte de las soluciones alternativas. Durante la primavera de 2000, ABB comenzar á a comercializar este robot.extiende el campo de aplicaci ón de la Un nuevo y peque ño robotautomatizaci ón industrialabren nuevas e interesantísimas oportuni-dades a la automatización industrial mediante robots.Facilidad de instalaciónEl IRB 140 es compacto y puede ser insta-lado sobre el suelo o en una pared, formando cualquier ángulo, o incluso ser suspendido cabeza abajo. Su gran alcance y sus seis ejes de trabajo lo hacen extre-madamente ágil. Todo esto ofrece flexibili-dad máxima de implantación e instalación.Facilidad de integración del sistema A través de su controlador, el robot puede comunicarse con los equipos de procesocircundantes por medio de señalesanalógicas y digitales discretas o mediante buses de campo para aplicaciones industriales. Sus dos puertos Ethernet le permiten también comunicarse con los ordenadores de las oficinas, por ejemplo para fines de supervisión y de tratamiento del software. Todo esto significa que el IRB 140 está preparado para representar su importante papel en los sistemas integrados de producción.Facilidad de puesta en funcionamientoAl igual que los miembros mayores de esta familia de robots, el IRB 140 puede ser programado de diferentes formas, como por ejemplo:I Con un PC, utilizando la herramientade desarrollo de software Program-Maker, basada en Windows.Este método es especialmenteeficiente en el caso de grandessistemas con numerosos robots.I Con un panel de programaciónespecial, robusto, tomando al robot‘de la mano’ y llevándolo por todoslos movimientos mientras se registran todos los puntos.El método a utilizar depende de las prefe-rencias personales. Ambos son rápidos y fáciles de usar en cualquier situación, tanto en las primeras sesiones de progra-mación como en las fases posteriores de ajuste y eliminación de errores. Tambiénes posible combinar ventajosamenteambos métodos, por ejemplo haciendo laprogramación inicial en un PC y haciendolos ajustes y la eliminación de errores conun panel de programación.Como sucede con robots de ABB, elIRB 140 se programa con el lenguajeRAPID, que es una combinación bienequilibrada de sencillez, flexibilidad ycapacidad de resolución de problemas. Laestructura jerárquica y modular de losprogramas hace muy fácil crear y depurarcualquier tipo de programa de control derobots. La librería de instrucciones y fun-ciones, ya rica de por si, puede ampliarsefácilmente con instrucciones, funciones yprocedimientos definidos por el usuario.Con este lenguaje se pueden realizar múl-tiples tareas y resolver fácilmente las inte-rrupciones y errores, pues a su velocidadañade una gran capacidad para el segui-miento de trayectorias muy precisa.La utilización del mismo lenguaje deprogramación en toda la gama de robotsde ABB significa también que el usuario,una vez que ha aprendido a controlar unrobot, es capaz de controlar también losdemás.Cuatro aplicaciones típicasEl IRB 140 ha sido diseñado pensando enlas siguientes aplicaciones típicas:I Soldadura al arcoI Pulverización de moldes de aluminioy desbarbadoI Montaje, manutención y embalaje depequeños artículosI Carga, descarga y asistencia demáquinasSoldadura al arcoPor sus propias características, el IRB 140es perfectamente apropiado para las apli-caciones de soldadura al arco pero, bus-cando una utilidad aún mayor para losclientes, ABB ha desarrollado en el nuevorobot una célula completa y autónoma desoldadura al arcoFlexAct Compact, la célula incorpora tam-bién una mesa de trabajo, elementos desoldadura y un sistema de gestión. Conuna ocupación de suelo de 2,1 x 1,3 m,la célula, montada sobre patín, ha sidodiseñada para instalarla rápida y fácilmen-te en pequeños espacios, en líneas deproducción existentes. Se trata de unaunidad de conexión rápida que puedetransportarse de un lugar a otro con unacarretilla elevadora normal. Dispone deconexiones simples para la energía eléc-trica, gas y aire, de forma que la unidadpuede estar instalada y en marcha enunos pocos minutos. La célula FlexArcCompact no provoca ningún coste extrade cimentaciones, soportes para tendidode cables, equipos de seguridad opruebas.Industrial ITLa célula FlexArc Compact proporciona una flexibilidad inmediata eliminando los cuellos de botella y facilitando un cambio rápido entre tareas. Por eso es tan atractiva para los fabricantes que necesi-tan cambiar continuamente la producción y los útiles utilizados en la misma. Pulverizaci ón de moldesComo sucede con muchos otros miem-bros de su familia, el nuevo robot IRB 140se encuentra disponible con clase de pro-tección IP67 para aplicaciones de fundi-ción, y no solo en su articulación y en subrazo superior sino también en toda su estructura, hasta la misma base, inclusive todos los cables y conexiones. Esto signi-fica que el robot resiste las salpicaduras de metal fundido, así como el lavado a alta presión y el rociado con detergentes.Una de las principales aplicaciones del IRB 140F es la pulverización de moldes,que ha llevado a diseñar el modelo RoboSpray 140. Se trata de un paquete robótico completo para la pulverización de moldes de inyección, que incluye un cabezal pulverizador con boquillas múlti-ples, un sistema de control de la lubrica-ción y el programa SprayWare para el proceso de pulverización.Las pequeñas dimensiones del robot permiten instalarlo en posición óptima en la máquina de moldeo por inyección.Además dispone de la capacidad necesa-ria para soportar las cargas exigidas por el manejo de la compleja pistola pulveriza-dora y tiene la destreza necesaria para mover la pistola alrededor de moldes de formas muy complejasOtro campo de aplicación del IRB 140F es el desbarbado de piezas moldeadas por inyección. ABB está trabajandoIndustrial ITEl IRB 140 con protección IP67 es apropiado para la pulverización de mol-des en las máquinas de moldeo de aluminio de tamaño pequeño y medio. El robot se monta enla máquina y puede doblarse hacia atrás, permitiendo acceder a la máquina para proceder al mantenimiento.3actualmente con varios asociados para desarrollar la célula FlexDeflasher, para piezas pequeñas. Se trata de una unidad totalmente integrada que incluye un robot, herramientas de desbarbar, protección de seguridad y software específico para la aplicación. También es de pequeño tamaño, lo que unido a su alta capacidad de carga y a su capacidad de manipulación en tres dimensiones lo hace ideal para esta aplicación.Ensamblaje y embalado depequeños artículosEl IRB 140 se mueve a gran velocidad ycon gran precisión. Estas cualidades,añadidas a su compacto diseño compacto,a su gran alcance y a la flexibilidad de sumontaje, lo hacen ideal para las líneas demontaje y prueba de pequeños artículoselectrónicos, tales como teléfonos móvileso aparatos de radio, y para aplicacionesde embalaje. Pensando en estas aplica-ciones se ha desarrollado una versiónClase 10 del robot para talleres que exi-gen un alto grado de limpiezaGracias a su gran capacidad portante,el robot puede manejar todas lasherramientas necesarias, incluso de formamúltiple si fuera necesario, con el fin dereducir la duración del ciclo y acelerar laproducción. Un software para seguimien-to de transportadores permite al robotsincronizar de forma precisa sus movi-mientos con los del producto.Industrial ITLos robots IRB 140 invertidos son ideales para el montajey prueba de pequeños artículos electrónicos en talleres que exigen un gran grado de limpieza, según Clase 10. El robotes compacto y por lo tanto apropiado para líneas de producción en las que se dispone de poco espacio.Asistencia para las m áquinas El nuevo robot es perfecto para las máquinas de moldeo de plásticos por inyección de tamaño pequeño o medio.Su extraordinaria flexibilidad de montaje permite instalarlo en posición óptima encima o en un lado de la máquina, o incluso suspenderlo de un pórtico elevado. Gracias a su capacidad de carga,de 5 kg, no tiene limitación alguna en cuanto al tamaño de los útiles que porta;a la máxima velocidad no solo puede manejar pinzas para piezas de múltiple impresión sino también 'dobles' pinzas para cargar piezas a insertar y para descargar piezas moldeadas, terminadas en un solo ciclo, contribuyendo así a aumentar la productividadLos 6 ejes y el gran alcance del robot se traducen en una gran accesibilidad alrededor del molde; la velocidad y precisión del robot garantizan una gran rapidez de carga y descarga. Soporte de softwareEl IRB 140 está soportado por una amplia variedad de programas de software que permiten al usuario conseguir la máxima rentabilidad de sus inversiones, tanto durante el desarrollo de la aplicación como durante el funcionamiento normal. Veamos algunos ejemplos:ITrueMove ofrece un control preciso e independiente de la trayectoria y de la velocidad basándose en unamodelización dinámica. También ofrece una forma flexible e intuitiva de especificar las zonas en esquina (por ejemplo, la posibilidad de tener tamaños de zona individuales para la trayectoria del centro de la herramien-ta y para la reorientación de la misma).IQuickmove aplica un modelo dinámi-co avanzado con el fin de garantizar que las duraciones del ciclo del robot sean siempre lo más cortas posible.No hay necesidad de ajuste manual.Esto se consigue sin que la precisión de la trayectoria se vea afectada.I Soft Safety Clutch . Software para reducir la fuerza de las colisiones,protegiendo las piezas, los útiles y el brazo del robot sin tener que instalar equipos adicionales.ILoad identification . El robot puede identificar de forma precisa la carga que soporta actualmente. No es nece-sario realizar mediciones manuales ni cálculos. La forma del movimiento durante la identificación puede ser regulada por el usuario con el fin de impedir que se produzcan colisiones.ISoluciones típicas de control para aplicaciones típicas. Software para conseguir el máximo rendimiento del robot en aplicaciones típicas durante un tiempo de desarrollo lo más corto posible, como por ejemplo ArcWare™,GlueWare™, SprayWare™, etc.ISimulación . Programas de simulación para el PC, en cuya pantalla pueden examinarse y comprobarse las solu-ciones en fase de desarrollo con el fin de establecer la viabilidad y duración de los ciclos.Los programas también facilitan la programación de los robots y el ajuste de los programas.ConclusionesEl campo de la robótica industrial ha avanzado mucho durante las tres o cuatros décadas que constituyen su histo-ria. Durante este tiempo se ha conseguido que los robots industriales sean cada vez más 'inteligentes', más ágiles y diestros,más compactos, más rápidos y más eco-nómicos. Esta evolución ha multiplicado las posibilidades de aplicación industrial de la robótica, como demuestra el nuevo robot IRB 140 de ABB.IIndustrial ITAutorKarl-Gunnar Johnsson ABB Robotics ABSE-721 68 V äster ås, Suecia Telefax: +46 21 132 592E-mail:***************************.comEl robot IRB 140 cargando y descargando piezas de plástico en unamáquina de moldeo por inyección. El robot puede ser equipado con una doble pinza para manipular los insertos y las piezas en un mismo ciclo de trabajo.5。
ABB 可变喷嘴环增压器
/turbocharging
A100-L
Volume flow ranges
© ABB Turbo Systems Ltd
Large compressor and turbine portfolio to meet the specific efficiency and pressure ratio requirements of every engine
A100
ABB Turbochargers for 2-stroke engines
7.0 6.5
IMO I
IMO II
IMO III
compressor pressure ratio [-]
6.0 5.5 5.0 4.5 4.0 3.5 3.0 2000
2-stage Turbocharging
SCR
operation limits
max 2-stroke exhaust temperature after turbocharger
400 300 200 100 1
Limit of Ammonia- hydrosulfate formation
Limit of urea injection Limit of NH3 – NOx reaction
Emission regulations till 2016 – Marine
Operating Conditions SCR
Exhaust gas temperature [° C] 600 500
Gradual increase of NH3 oxidation SECA IMO 2015 2020 SECA 2010 SECA 2000 IMO 2012 Limit of TiO catalyst stability IMO Tier 1
ABB机器人中文手册
阐述RAPID程序的基本结构,包括程序、任务、模块、例程等组成 部分。
编程环境搭建与配置
1 2 3
编程环境介绍 介绍ABB机器人编程环境的组成和功能,包括PC SDK、RobotStudio等。
编程环境搭建 详细讲解如何在PC上安装和配置ABB机器人的编 程环境,包括软件下载、安装步骤、环境变量设 置等。
常运行。
熟悉设备操作 在调试前,应熟悉ABB机器人的基本 操作,包括启动、停止、急停等。
记录调试数据 在调试过程中,应记录相关数据,如 运行速度、位置精度等,以便后续分 析和优化。
日常维护与保养建议
定期清洁设备
检查电缆和连接件
定期清洁机器人本体和控制器,保持设备干 净整洁,避免灰尘和杂物堆积影响设备运行。
低生产成本,并保障产品质量。
电子制造
在电子制造领域,工业机器人主要 用于电路板组装、芯片封装等精细 操作。它们能够精确控制生产过程 中的每一个细节,确保产品质量和
稳定性。
塑料加工
工业机器人也广泛应用于塑料加工 领域,如注塑机上下料、塑料件装 配等。它们能够减轻工人的劳动强 度,提高生产效率和质量。
其他领域
机器人末端执行器无法抓 取或释放物体
机器人运动轨迹异Βιβλιοθήκη 或不 稳定机器人传感器故障或误报
故障原因分析定位
机械故障
检查机器人本体和末端执行器 是否有损坏、松动或磨损等情 况。
控制系统故障
检查机器人控制系统硬件和软 件是否正常,包括控制器、驱 动器、电机和编码器等。
电源故障
检查机器人供电电源是否正常, 包括电压、电流和接线等。
02
检查机器人本体、控制器、电缆等是否完好无损,如有损坏应
ABB变频器中英说明对照
ABB变频器中英说明对照ABB变频器中英说明对照:Parameters参数Changedpar已修改的参数Setnotfound(未发现设置)Parlock(参数锁定)Incompatdrive/model(不兼容的传动/模式)Toomanydifferences(差异太多)I/OSETTINGS(I/O设置)DIGITALINPUTS(数字输入)SEL(选中)键•reF-给定•PAr-参数•CoPY-拷贝EXIT/RESET(退出/复位)•uL-上装•rEA-恢复所有参数•dLP-下装部分参数Group99:启动数据9901LANGUAGE语言9902APPLICMACRO应用宏-3…7,1511 9905MOTORNOMVOLT电机额定电压-200 (600V1V400V)9906MOTORNOMCURR电机额定电流0.2*I2n…2.0*I2n0.1A1.0*I2n 9907MOTORNOMFREQ电机额定频率10.0…500.0Hz0.1Hz50.0Hz 9908MOTORNOMSPEED电机额定转速50…30,000rpm1rpm取决于容量 9909MOTORNOMPOWER电机额定功率0.2…3.0*Pn0.1kW1.0*Pn Group01:运行数据0102SPEED转速0…30000rpm1rpm-0103OUTPUTFREQ输出频率0.0…500.0Hz0.1Hz-0104CURRENT电流0…2.0*In0.1A-0105TORQUE转矩-200…200%0.1%-0106POWER功率-2.0…2.0*P2N0.1kW-0107DCBUSVOLTAGE直流电压0…2.5*VdN1V-0109OUTPUTVOLTAGE输出电压0…2.0*VdN1V-0110DRIVETEMP传动温度0.0…150.0°C0.1°C-0111EXTERNALREF1外部给定10.0…500.0Hz0.1Hz-0112EXTERNALREF2外部给定20.0…100.0%0.1%-0113CTRLLOCATION控制方式0=本地,1=外部1,2=外部21-0114RUNTIME(R)运行时间0…9999h1h0h0115KWHCOUNTER(R)千瓦时计数器0…9999kWh1kWh-0116APPLBLKOUTPUT调节器输出0.0…100.0%(0.0…600.0%转矩控制)0.1%-0118DI1-3STATUSDI1-3状态000…111(0…7十进制)1-0119DI4-6STATUSDI4-6状态000…111(0…7十进制)1-0120AI1AI10.0…100.0%0.1%-0121AI2AI20.0…100.0%0.1%-0122RO1-3STATUSRO1-3状态000…111(0…7十进制)1-0123RO4-6STATUSRO4-6状态000…111(0…7十进制)1-0124AO1AO10.0…20.0mA0.1mA-0125AO2AO20.0…20.0mA0.1mA-0126PID1OUTPUTPID1输出-1000.0…1000.0%0.1%-0127PID2OUTPUTPID2输出-100.0…100.0%0.1%-0128PID1SETPNTPID1设定值单位和换算比例是由参数4006/ 0129PID2SETPNTPID2设定值单位和换算比例是由参数4206和4207来定义0130PID1FBKPID1反馈值单位和换算比例是由参数4006/4106和4007/4107来定义--0131PID2FBKPID2反馈值单位和换算比例是由参数4206和4207来定义--0132PID1DEVIATIONPID1偏差值单位和换算比例是由参数4006/ 4106和4007/4107来定义--0133PID2DEVIATIONPID2偏差值单位和换算比例是由参数4206 和4207来定义--0134COMMROWORD通讯字0 (6553510)0135COMMV ALUE1通讯数据1-32768…+32767100136COMMV ALUE2通讯数据2-32768…+32767100137PROCESSVAR1过程变量1-10138PROCESSVAR2过程变量2-10139PROCESSVAR3过程变量3-10140RUNTIME运行时间0.00…499.99kh0.01kh0.00kh0141MWHCOUNTER兆瓦时计数器0…9999MWh1MWh-0142REVOLUTIONCNTR旋转计数器0 (6553510)0143DRIVEONTIME(HI)通电时间(日)天1天00144DRIVEONTIME(LO)通电时间(滴答)hh.mm.ss1=2s00145MOTORTEMP电机温度-10...200°C/0...5000Ohm/0 (1)100146…0148未使用。
TPR61_A10增压器在R16V280ZJ型柴油机上的配套研究
试 验 ·研 究TPR612A10 增压器在 R16V280Z J 型柴油机上的配套研究潘 翼 龙(戚墅堰机车车辆厂 , 江苏 常州 213011)摘要 : 通过 TPR612A10 增压器与 R16V280Z J 型柴油机的配套试验 ,测试了不同供油提前角 、不 同喷嘴环面积及环境温度变化对柴油机性能的影响 ,优化了柴油机的装车运用性能和系统结构 。
关键词 : R16V280Z J 型柴油机 ; TPR612A10 增压器 ; 性能 ; 试验 中图分类号 : U26211文献标识码 : B文章编号 : 100321820( 2007) 0920001204TPL 系列增压器中最小的一档 。
它具有以下特点 。
(1) 压气机特性宽广 , 应用适应性广 , 效率比 VTC304P 213 更高 。
( 2 ) 结 构 简 单 , 固 有 频 率 高 。
零 件 数 比 VTC304P 213 少 50 %多 , 维修更方便 ; 无需水冷 , 可适应柴油机的多种用途 ;涡轮采用了不带拉筋丝的 整体结构 ;支承采用整体支架下穿螺栓结构 ,对来 自柴油机的振动感应度低 ,增压器底座所受的应力 小 ;径向测速 ,安全可靠 。
(3) 转子轴与轴承的工作寿命更长 ,工作更可靠 。
滑动轴承设计的机油滤清精度为 30μm , 远低 于 VTC 系列增压器 20μm 的要求 ; 轴承采用内置式 滑动轴承 ,转速可更高 ; 新型的推力轴承可承受比 VTC304P 213 更高负荷 、更高转速的运行工况 ; 径向 固定的轴承滑套通过挤压油膜式来实现对中 ,检修 间隔可明显延长 。
1 前言R16V280Z J 型 柴 油 机 是 戚 墅 堰 机 车 车 辆 厂 与 奥地利 AV L 公司合作开发的新一代柴油机 ,UIC 标 定功率 4705 kW ,装车功率 4410 kW 。
样机开发时 , 增压器的选型主要考虑了国产化 。
浅谈DF8B机车VTC254-13型涡轮增压器存在问题及解决途径
浅谈DF8B机车VTC254-13型涡轮增压器存在问题及解决途径蒲白铁路运输公司种付勇摘要对铁路运输公司宝麟项目部运量增长后出现的增压器故障原因进行了深入分析,从保养、运用中提出合理的解决增压器故障的措施,降低了生产成本,提高了机车运用效率,保证了安全行车。
关键词增压器故障原因措施1前言目前铁路运输公司宝麟项目部DF8B 型内燃机车全部使用的是VTC254-13型涡轮增压器,但由于使用维护不当,极易造成机件破损。
对近年来发生的增压器故障分析发现多数因使用维护方法欠缺从而造成故障。
就此问题我通过多年实际技术维护经验、查阅相关资料、拆装增压器、研究分析得出一些个人看法,提出解决措施,防止增压器设备故障造成行车安全事故。
涡轮增压器实际上是一种空气压缩机,通过压缩空气来增加进气量。
它是利用发动机排出的废气惯性冲力来推动涡轮室内的涡轮,涡轮又带动同轴的叶轮,叶轮压送由空气滤清器管道送来的空气,使之增压进入气缸。
当发动机转速增大,废气排出速度与涡轮转速也同步增加,叶轮就压缩更多的空气进入气缸,空气的压力和密度增大可以燃烧更多的燃料,相应增加燃料量和调整发动机的转速,就可以增加发动机的输出功率了。
涡轮增压器的最大优点是能在不加大发动机排量就能较大幅度地提高发动机的功率及扭力,一般而言,加装增压器后的发动机的功率及扭矩要增大20~30%。
DF8B型内燃机车使用的VTC254-13涡轮增压器是江津增压器厂引进吸收瑞士ABB公司专利生产的适用于铁路内燃机车柴油机的废气涡轮增压器,具有转速和增压压力高、结构简单紧凑、方便检修的特点。
具体结构图如下图:图-1VTC-254-13涡轮增压器示意图2增压器结构原理VTC-254-13增压器结构如上图所示。
压气机为单级离心式,由吸气弯头、导风轮、压气叶轮(工作轮)、扩压器和涡壳等组成。
吸气弯头呈环形渐缩弯道。
压气叶轮为半开式,叶型为后弯型。
涡轮为单级轴流式,由废(燃)气进气壳、喷嘴环、涡轮叶轮、废(燃)气排气壳组成。
ABB机器人产品手册中文9.4

目录3投资机器人的10大理由4提升效率、品质与安全性6客户服务8机器人28控制器29机器人导轨30变位机34工艺设备42喷涂机器人46喷涂设备48模块化解决方案50标准弧焊工作站52软件产品2 机器人 | 产品系列产品系列 | 机器人 3投资机器人的10大理由投资机器人的10大理由1. 降低运营成本2. 提升产品质量与一致性3. 改善员工工作质量4. 扩大产量5. 增强生产柔性6. 减少原料浪费,提高成品率7. 满足安全法规,改善健康安全条件8. 减少人员流动,缓解招工压力9. 降低投资成本(存货、在制品成本)10. 节省宝贵的生产空间低成本竞争的加剧,环境法规的日趋严格,以及从业人员生产技能的降低,致使制造商承受着越来越大的压力。
此外,制造商还面临提高生产效率、产品质量及安全水平的挑战。
在这种形势下,采取可持续的制造解决方案是一条成本效益显著的途径,可实现经济效益、环境效益乃至工厂总体绩效的全面改善。
提升效率、品质与安全性在当今高度竞争的全球市场,工业经济实体必须快速增长才能满足其市场需求。
这意味着,制造企业所承受的压力日益增大,既要应付低成本国家的对手,还要面对发达国家的劲敌,而后者为增强竞争力,往往不惜重金改良制造技术、扩大生产能力。
强盛的制造业有助于拉动一个国家的GDP增长,不仅使本行业从业人员受益,更可惠及全体国民。
为成功立足于全球市场,制造商必须凭借技术实力强化产品和工艺的竞争能力。
斥资投建先进制造系统是一条必由之路,不但弥补人力成本高昂的劣势(发达国家的人力成本通常是低成本国家的四至五倍),还可产生其他多重效益。
实践证明,集多种优势于一体的机器人自动化,足以使制造企业在全球市场上稳立于不败之地。
自动化的优势机器人自动化一系列广受好评的优势,可参见“投资机器人的10大理由”。
许多行业,特别是工程和食品等更为传统的行业,普遍面临劳动力老龄化、难以吸引年轻的新员工的问题。
随着机器人解决方案的引入,可减轻对传统技术人员的依赖,充分发挥 IT和计算机等新兴技术的优势,相关人才也更容易在年轻一代中物色。
2024年度-ABB机器人中文手册pdf

一种中型控制器,适用于需要较高性能的 应用。它提供了丰富的I/O接口和扩展选 项,支持多种机器人型号。
一种紧凑型控制器,适用于小型机器人和 简单应用。它具有成本效益高、易于使用 的特点。
9
传感器类型及作用
位置传感器
01
用于检测机器人的位置和姿态,确保机器人能够准确地执行预
定任务。
速度传感器
02
用于检测机器人的运动速度,为控制器提供实时反馈,确保机
21
协作机器人应用案例
人机协作ห้องสมุดไป่ตู้
ABB协作机器人可以与人类员工一起工作,共同完成某些复杂任务。例如,在机 床上下料、质量检测等环节中,协作机器人可以辅助人类员工完成繁重、危险或 重复性的工作,提高工作效率和员工满意度。
柔性生产
协作机器人的灵活性和易编程性使其能够适应多种生产场景和工艺要求。通过简 单的编程和调试,协作机器人可以快速地适应不同的生产任务和工作环境,实现 柔性生产。
22
特殊行业应用案例
航空航天
ABB机器人在航空航天领域的应用主要体现在飞机零部件的加工和装配过程中。由于飞机零部件具有高精度、高 质量的要求,ABB机器人凭借其高精度、高稳定性的特点,能够满足这些特殊需求。
食品加工
在食品加工行业,ABB机器人可以完成食品的分拣、包装等任务。机器人的使用不仅可以提高生产效率,还能保 证食品的卫生和质量安全。同时,机器人的柔性生产能力也使得食品加工企业能够快速地适应市场变化和产品更 新。
。
01
02
03
04
19
05
05
集成应用案例展示与分析
20
自动化生产线集成案例
汽车制造行业
ABB机器人广泛应用于汽车制造行业的自动化生产线,包括 车身焊接、涂装、总装等环节。通过高精度、高效率的机器 人操作,提高了生产线的自动化程度和生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB涡轮增压器
ABB涡轮增压器中文版
现有增压器型号
长 90 - 350CM 重 280 - 12500KG 增压功率
700 - 18500KW
长 90 - 120CM 重 340 - 720KG 增压功率 600 - 3500KW
ABB涡轮增压器中文版
长 50 - 100CM 重 60 - 300KG 增压功率
M[mm]
184P
0.85..1.60 0.50..1.26
214P
0.87..1.58 0.04..1.05
254P
0.96..1.70 0.06..1.10
304P
1.20..1.95 0.05..1.10
354P
1.35..2.29 0.05..1.17
VTR
B1
B2
184
0.00..0.04 0.00..0.03
ABB涡轮增压器中文版
增压器型号对比
ABB涡轮增压器中文版
增压器型号对比
E – 高增压 P – 高效率 D – 高增压高效率
ABB涡轮增压器中文版
VTR..4型涡轮增压器名牌中额定转速示意
涡轮增压器的最大转速[rps]和最高废气排气温度[℃]:
(1)额定转速nMmax & 最高废气排气温度tMmax
时后变黑,而其润滑性依然良好,但此时已不能根据滑油颜色来判 断问题或必要的更换。当船舶行驶到热带地区或轴承换新(如将 LA34的轴承换为LA70)都会使压气端油温升高; 3. LA70的轴承会使压气端滑油温度升高5-10度,当意外不平衡或部件 损坏时透平操作情况会恶化,如有一台相似的增压器也在使用中, 与之相比,这些问题将显而易见,正常状况下的增压器滑油色变过 程则更缓慢; 4. 请按照以下方法检查是否出现问题: 更换滑油,仔细观察排出的滑油中的金属颗粒。如果滑油色变异常迅 速(如5-20小时)则说明增压器内部出现问题
500 - 1800KW
新增压器型号
至1999年产量:409 台 总产量:> 750 台 长:113 – 380 CM 重: 520 – 13200 KG 增压功率: 1250 – 25000 KW
至1999年产量:1397 台 总产量:> 2000 台 长: 35-65 CM 重: 80 – 400 KG 增压功率: 500 – 3000 KW
214
0.00..0.04 0.00..0.03
254 304
0.00..0.04 0.00..0.05 0.00..0.03 0.00..0.03
354
0.00..0.06 内接头 0.00..0.04 甩油盘
ABB涡轮增压器中文版
增压器检修后废气排气温度升高
增压器检修后,在其使用初期偶尔会发生增压前废气温度升高,有时 甚至会引发高温警报。很明显,增压器在检修后运行之初其性能下降 了。
ABB涡轮增压器中文版
润滑系统
ABB涡轮增压器中文版
润滑系统
新
离心力
旧
新
离心力
旧
ABB涡轮增压器中文版
拆卸及安装
说明书明确要求转子轴的定位螺丝必须有特定的角度
ABB涡轮增压器中文版
拆卸及安装
检修中必须使用特定 的专用工具
轴承是被转子轴的 定位螺丝而非其本 身的定位螺母压到 位
ABB涡轮增压器中文版
紧固角度
刻角度的套筒扳手
将套筒扳手(90050)压入并在 VTR
角度
甩油盘(34180)上做径向角度
标记
ɑ[°]
无角度的套筒扳手
184
35
先用千分尺测出玄的长度(如 214
40
右表),在套筒扳手(90050) 上标记,将套筒扳手(90050)
254
30
压入并在甩油盘(34180)上做 304
30
间隙L & M值的测量
请参考说明书的拆装指南
ABB涡轮增压器中文版
甩油盘的操作
请参考说明书 的拆装指南
ABB涡轮增压器中文版
油泵的操作
请参考说明书 的拆装指南
ABB涡轮增压器中文版
L & M值的计算方法及其公差参数表
L & M值的公差必须在以下给出的参数表范围内:L = K – K1
M = K2 - K
VTR 184
214 254 304 354
L[mm] 0.54..1.28 0.55..1.27 0.56..1.35 0.68..1.50 0.79..1.70
M[mm] 0.20..1.02 0.19..1.21 0.19..1.26 0.20..1.30 0.20..1.37
VTR L[mm]
ABB涡轮增压器中文版
VTR涡轮增压器,拆解部件图
ABB涡轮增压器中文版
润滑系统
为了更好地润滑及冷却轴承,VTR..564的油泵已被优化: VTR..564及VTR0/1系列的增压器中任然使用直径12mm的油泵 VTR..564 E/P/D系列的增压器必须使用新型直径为18mm的油泵
新型直径为18mm的油泵不能被直径12mm的油泵替代 注意:因为吸油管的直径由12mm增至18mm,所以在更换油泵时不要忘记更换泵座
原因解释
现代的增压器,尤其是大功率增压器,对燃烧过程中微小的偏差已经 非常敏感。在理想状态下,透平叶片与扩压器之间没有 间隙,此时其 增压效果最强。但是实际运行中透平叶片和扩压器之间一定有间隙, 这样转子轴才能自如地运转。
压气叶轮 导气叶轮
扩压器 转子轴 喷嘴环罩 喷嘴环 压气端轴承 透平端轴承
规格简称
ABB涡轮增压器中文版
滚珠和滚柱轴承及独立滑油的增压器VTR184…VTR714
滑油急速色变可能是以下原因造成:
1. 滑油品牌更换,特别是矿物油更换为人工合成油; 2. 部分人工合成油的色变过程比矿物油快,人工合成油会在使用几千小
径向角度标记(从初始标记向 354
30
右)
454
30
紧VTR454/564/714型喷嘴环螺母 564
42
时只需用紧固角ɑ的2/3
714
45
ABB涡轮增压器中文版
套筒扳手 直径 [mm] 28 35 44 45 52 60 60 86
[mm] 8,5 12 11,5 11,5 13,5 15,5 21,5 33
(试验台或实际使用中以额定转速110%的速度运转不能超过10小时)
t (2)实际操作中最高转速:nBmax , Bmax
ABB涡轮增压器中文版
VTR..4型涡轮增压器名牌中额定转速示意
使用期限(单位1000小时) (3)轴承 (4)叶轮 (5)带透平叶片的转子轴
ABB涡轮增压器中文版
涡轮增压器详解: