”蜘蛛侠“仿生机器人说明书
爬壁幕墙清洗机器人设计说明书

江西省第二届大学生机械创新设计大赛暨第三届全国大学生机械创新设计大赛江西赛区选拔赛设计说明书INSTRUCTION OF DESIGN作品名称“小蜘蛛”幕墙攀爬清洗机参赛队伍陈明登谢信韦冯江涛刘连杰郭晓欢指导老师李国臣吴文通参赛单位井冈山大学2008年4月18日目录摘要 (i)小蜘蛛幕墙攀爬清洗机设计说明书............................. 错误!未定义书签。
作品内容简介 (4)1 研制背景及意义........................................... 错误!未定义书签。
2 主要功能和性能指标 (2)3 设计方案 (3)3。
1 机械机构 (3)3.2 控制机构 (3)4 理论设计计算 (4)4.1 真空吸附力计算 (4)4.2 幕墙清洗机器人附着的力学分析 (5)5机构设计与工作原理 (7)5。
1攀爬机构........................................... 错误!未定义书签。
5.2清洗机构 (8)5.3铰接连杆支撑机构.................................... 错误!未定义书签。
5。
4换气机构........................................... 错误!未定义书签。
6创新点及应用 (10)7作品实物工作图........................................... 错误!未定义书签。
8应用前景................................................. 错误!未定义书签。
参考文献................................................... 错误!未定义书签。
摘要:“小蜘蛛”幕墙攀爬清洗机是基于昆虫攀爬动作的仿生原理制作而成.在国内外现有的壁面移动机器人研究成果的基础上,结合高空作业的特点,在对幕墙清洗机器人的共性问题—附着技术、爬行技术、清洗技术进行分析的基础上。
机器人操作流程的说明书
机器人操作流程的说明书一、引言机器人操作流程的说明书旨在提供详细的指导和步骤,以确保机器人能够正确且有效地执行各种任务。
本文将逐步介绍机器人操作的主要流程和注意事项。
二、装置准备1. 确保机器人电源已连接,并插入电源插座。
2. 检查机器人的各个部件是否安装正确并紧固。
3. 根据实际需要,调整机器人的工作环境,确保周围没有障碍物。
三、机器人操作步骤1. 开机a. 按下机器人的电源开关,等待机器人启动。
b. 在控制面板上输入机器人的登录信息,包括用户名和密码。
c. 确认登录信息无误后,点击登录按钮。
2. 执行任务a. 从任务列表中选择需要执行的任务,并点击任务名称。
b. 检查任务要求和指示,确保明确了解任务的要求和目标。
c. 按照任务指示,控制机器人的移动、抓取或其他操作,执行任务。
d. 在任务执行过程中,随时观察机器人的状态和工作情况,确保任务进展顺利。
e. 如遇意外情况或问题,立即停止机器人操作,并采取相应的修复措施。
3. 完成任务a. 当任务执行完毕时,确认操作结果是否符合预期要求。
b. 如操作结果正确,点击确认完成任务。
c. 如操作结果有误或不符合要求,重新进行必要的调整和操作,直至满足要求。
d. 确认任务执行完成后,关闭机器人电源。
四、安全提示1. 在操作机器人之前,确保已经阅读并理解相关安全手册和操作规程。
2. 在操作过程中,遵守安全操作规程,确保自身和他人的安全。
3. 注意保持机器人周围的工作环境整洁并无障碍物,防止发生意外。
4. 如遇到紧急情况或机器人失控,请立即采取应急措施,并通知相关负责人员。
五、维护保养1. 在机器人操作完成后,定期清洁机器人,包括机身、传感器和工具等。
2. 定期检查机器人的各个部件是否安装牢固,如有松动或损坏,应及时修复或更换。
3. 定期进行机器人的维护保养,包括润滑、校准和更换零部件等。
4. 如发现机器人存在异常情况或故障,应及时报修,并由专业维修人员进行维修。
机器人操作的说明书

机器人操作的说明书机器人操作手册1. 简介本机器人操作手册旨在向用户提供全面而易于理解的机器人操作指南。
通过本手册,用户可以了解机器人的基本操作方法,掌握使用机器人的技巧,以及遵守必要的安全规定,从而确保机器人的高效和安全运行。
2. 前提条件在开始操作机器人之前,请先确保以下条件已满足:2.1 供电:接通机器人的电源并确保稳定供电。
2.2 连接:将机器人与相关设备连接,并确保连接稳定可靠。
2.3 软件:安装并启动机器人操作所需的软件程序。
3. 启动机器人3.1 按下电源按钮,机器人将开始启动。
在启动期间,请确保机器人周围无障碍物,以防意外碰撞。
3.2 在机器人启动完成后,等待机器人完成自检程序。
一旦自检程序完成,机器人将进入待机模式,即待命状态。
4. 选择模式机器人提供多种模式供用户选择。
根据具体任务的要求,选择相应的模式:4.1 自动模式:机器人将自主执行任务,按照预设的程序和指令运行。
用户只需提供必要的输入参数,并监视机器人的运行状态。
4.2 手动模式:用户可以通过遥控器或者控制台手动控制机器人的运动和操作。
在手动模式下,用户可以更加灵活地控制机器人,并进行实时的调整和干预。
5. 基本操作以下是机器人的基本操作说明:5.1 运动控制:使用遥控器或者控制台上的控制按钮,控制机器人前进、后退、左转、右转等运动动作。
请注意操作时的环境安全,避免机器人与障碍物发生碰撞。
5.2 抓取物体:机器人配备抓取装置,可用于抓取和搬运物体。
在使用抓取装置时,请确保物体的重量在机器人负载范围之内,并注意物体的稳定和安全。
5.3 视觉操作:机器人配备摄像头和图像识别系统,可进行视觉操作。
通过摄像头观察环境,并使用图像识别系统对目标进行识别和跟踪。
6. 安全事项在操作机器人时,请遵守以下安全规定:6.1 注意观察:在机器人操作过程中,请始终保持警惕,注意观察机器人周围的环境,并避免与其他人员或物体发生碰撞。
6.2 安全距离:请与机器人保持安全距离,避免机器人运动时造成伤害。
”蜘蛛侠“仿生机器人说明书
”蜘蛛侠“仿生说明书蜘蛛侠仿生说明书一:产品概述蜘蛛侠仿生是一款基于蜘蛛侠角色设计的产品。
它采用了最先进的仿生技术和控制系统,具备高度的机动性和适应性,能够模拟蜘蛛侠的动作和能力。
此说明书将详细介绍蜘蛛侠仿生的组成部分、特点以及使用方法。
二:产品组成蜘蛛侠仿生由以下主要组成部分构成:1. 主体:包含了处理器、传感器、电池等核心部件,负责控制的行动和感知环境。
2. 仿生外骨骼:模拟蜘蛛侠的外骨骼结构,提供支撑和保护身体的功能。
3. 运动系统:包括多轴关节和电机,用于实现的运动和灵活性。
4. 感知系统:集成了摄像头、红外传感器等设备,使能够感知周围的环境。
5. 控制系统:通过无线网络与用户设备连接,接收指令并控制的动作。
三:产品特点1. 高度机动性:蜘蛛侠仿生可以进行各种复杂的动作,如攀爬、跳跃、悬挂等,具有出色的机动性能。
2. 自适应能力:具备自主学习和适应环境的能力,可以根据不同场景做出相应的反应和动作。
3. 多功能应用:蜘蛛侠仿生可应用于安全巡逻、救援行动、娱乐等多个领域,发挥多种功能。
4. 可编程性:用户可以通过编写指令和程序,实现对的控制和定制化操作。
四:使用方法1. 启动:按下主体上的启动按钮,待启动完成后即可进行操作。
2. 控制:通过连接的无线网络,使用相关的控制设备发送指令给,实现运动和动作控制。
3. 自主学习:具备学习功能,可以通过多次操作和使用,逐渐掌握更多的动作和技能。
附件:1. 蜘蛛侠仿生使用手册2. 蜘蛛侠仿生维修指南法律名词及注释:1. 仿生技术:指模仿生物体的结构和功能来设计和制造或其他工程产品的技术。
2. 外骨骼:一种能够提供支撑和保护的外部骨骼结构,常用于增强人体机能或进行康复训练。
3. 传感器:指用来感知和检测环境信号的设备,如温度传感器、光传感器等。
4. 控制系统:指用于控制动作和行为的电子设备和软件系统。
5. 编程:指通过编写指令和程序来实现对的控制和自动化操作的行为。
12 DOF 六足蜘蛛机器人基板说明书

12 S ervo H exapodR obot C hassisThe 12 DOF Hexapod robot chassis from DAGU is a simple, low cost robot chassis designed for students and novices. Simple sample code for Arduino compatible controllers allows the chassis to be driven in any direction using common TV remotes. The kit includes:Ø1x laser cut, 4mm thick, acrylic base plateØ12x ABS leg segmentsØ6x Foam rubber feetØ12x 9g miniature servosØScrews needed for assemblyRecommended controller:Although any controller can be used with this chassis we recommend the DAGU Spider controller. This controller eliminates the need for additional power supply or servo interface circuitry.ØArduino Mega compatible with 6 timers, 128K FLASH, 8K SRAM and 4K EEPROM.ØCapable of driving up to 48 servos with all 70 I/O pins terminated with a 3 pin servo header.Ø3A, high efficiency DC-DC converter with 7V-32V input, 5V output.RS024screws.Mount a servo horn to six unused leg segments as shown using 2mm x 6mm self-tapping screws. Centre the servo and then fit the leg segment to the servo using a 2.3mm x 10mm pan head screw as shown. Gently turn the servo by hand to check the range of movement and adjust if necessary.2mm x 6mm 2.3mm x 10mmorientation of the servo.Fit a round servo horn to each of the six servos usinga 2x6mm screw.Step 6:Once all your legs are mounted the chassis is finished. A rectangular hole in the base plate allows you to mount a DAGU pan / tilt kit for adding a small camera or range finding sensor.mounting holesfor DAGU Spider controller.Hole for optionalsensor pan servo.。
仿生机器人说明书
课程设计说明书学生姓名:王超学号:1015070229 学院:机械工程学院班级: 机械102班题目: 慧鱼组合机器人的组装设计指导教师:陈国君苏天一职称: 副教授 2013 年 12 月 23 日目录1.引言 11.1内容摘要 11.2 慧鱼机器人 21.3 走进实验室 31.4 按键式传感器 31.5 设计工作原理 41.6慧鱼模型操作规程 52. 仿生机器人62.1仿生机器人迈克仿真示意图 62.2仿生机器人迈克仿真程序图示 62.3仿生机器人结构简图73. 移动机器人83.1 移动机器人基础模型83.2 移动机器人仿真图83.3移动机器人结构简图93.4移动机器人仿真程序框图104.工业机器人104.1工业机器人仿真图114.2业机器人结构简图114.3工业机器人仿真程序125.寻光机器人145.1寻光机器人仿真模型145.2连线图和结构简图15慧鱼组合机器人的组装设计摘要:慧鱼创意组合模型是一种技术含量很高的工程技术类拼装模型,是展示科学原理和技术过程的理想教具。
本设计是以德国慧鱼创意积木所组成的仿生模拟机器人为其基本架构,透过圈形式人机介面LLWin,经由智慧型微电脑介面板去驱动机器人,使机器人细部动作很容易达到我们需求,进而取代以往由硬体描述语言所驱动架构,通过慧鱼模型的组装,程序的编制,任务的完成,阐述机械机构之间的配合关系,各种传感器的安装和使用,以及软件程序的编制思维,实现对伺服电机,电磁线圈的控制,不但操作简易,更可使我们了解机械运作的原理。
关键词:慧鱼组合模型;机器人;传感器;机械原理;引言由于机器人的发展和快速广泛的被使用,可知科学家对于机器人的功能也相提高,除了超强的逻辑运算、记忆能力及具备类似的自我思考能力,另外在机器人的外表及内部结构,科学家更希望能模仿人类。
对于外在资讯的选集,也透过各种感应器,企图达到类似人类各种触觉的功能,选集了外在环境的资讯,一旦外在环境起了改变,机器人一定要能随着变化,做出该有的反应动作,更新自己的资料库,达到类似人类学习的功能。
”蜘蛛侠“仿生机器人说明书

"蜘蛛侠"仿生机器人设计说明书参赛者:江晓通李江全张其指导老师:何毅斌洪汉玉所在学校:武汉工程大学目录第一章引言 (3)1.1研究背景 (3)1.2国内外研究成果 (3)第二章仿生蜘蛛机器人的结构设计 (3)2.1设计的功能要求及分析 (3)2.2总体设计 (3)2.2.1结构分布 (3)2.2.2仿生蜘蛛机器人尺寸 (3)2.3详细设计 (4)2.3.1普通步行足 (4)2.3.1.1结构 (4)2.3.1.2驱动 (5)2.3.1.3减震器 (8)2.3.2多功能复合足 (9)2.3.2.1结构 (9)2.3.2.2驱动 (10)2.3.2.3复合足和减震器 (10)2.3.3躯干及外壳 (10)第三章步态分析及控制方案 (11)3.1蜘蛛的步态研究 (11)3.2控制方案 (13)第四章仿生蜘蛛机器人尺寸与性能分析 (14)4.1动作能力分析 (14)4.2设计合理性 (14)4.2.1驱动部分 (14)4.2.2机构原理 (14)4.2.3结构与强度 (14)4.2.4重量 (16)4.3设计可行性 (16)4.4创新性 (16)参考文献 (18)第一章引言1.1研究背景在如今的科技飞速发展的时代,机器人早已成为家喻户晓的科技产品,它被广泛的应用于各种场合和领域,像生产业、建筑业,或是危险的工作环境。
而将仿生学的一些技术应到机器人上做成的仿生机器人则能够在某些方面的更好的服务于人。
1.2国内外研究成果在机器人领域发展最好的应该是美国、日本了。
美国的仿生军用机器狗做的已经很成熟了,能够行走在各种不同地形,草地、雪地、山地等都能够平稳的行走,其自平衡能力允许它受到一定的冲击却仍能马上调整好身体而继续平稳行走。
日本的仿生机器人也十分的先进。
国内的机器人也在迅速的发展,一些仿生机器人也能够在自己的领域发挥它独特的功能。
第二章仿生蜘蛛机器人的结构设计2.1设计的功能要求及分析通过对蜘蛛结构和行为的研究,设计的仿生蜘蛛机器人可以用于多种场合。
Motoman-HP系列机器人的说明书
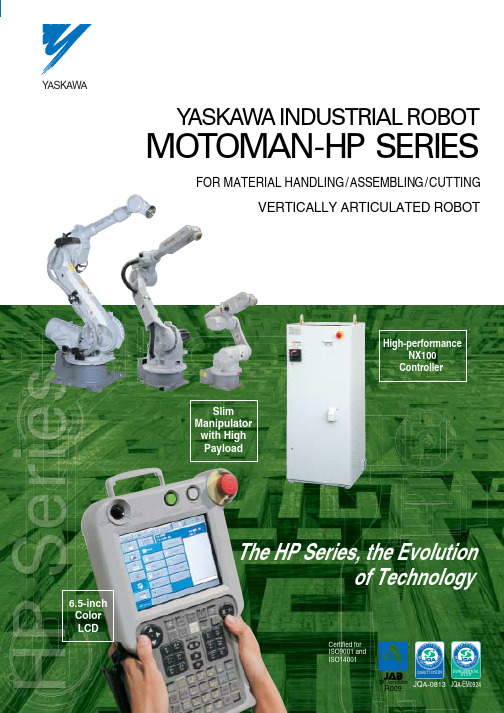
6.5-inch Color LCD
The HP Series, the Evolution of Technology
Certified for ISO9001 and ISO14001
ERTIFIED
ERTIFIED
C STEM
C STEM
MANA MANA
QMS Accreditation
panel function of 640×480 pixels. Using icons,
drawings, and operations similar to Windows, the operations are even easier than ever before. The onscreen Guidance Function allows you to confirm the program to operate the programming pendant.
*3: MOTOMAN Simulation Enhanced Graphics
Note: ROBCAD is a registered trademark of UGS Corp. IGRIP is a registered trademark of DELMIA Corp.
Байду номын сангаас
Operation switches
Coordinated control with 36 axes
The NX100 can control four manipulators (36 axes). This feature enables easy construction of a system for "Jigless Coordinated Motion (up to 4 manipulators)" and helps save space and reduce equipment cost.
Spider 机器人控制器说明书
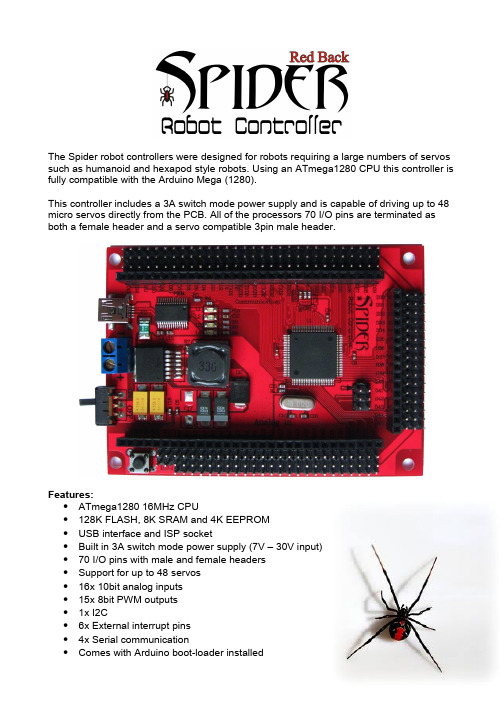
The Spider robot controllers were designed for robots requiring a large numbers of servos such as humanoid and hexapod style robots. Using an ATmega1280 CPU this controller is fully compatible with the Arduino Mega (1280).This controller includes a 3A switch mode power supply and is capable of driving up to 48 micro servos directly from the PCB. All of the processors 70 I/O pins are terminated as both a female header and a servo compatible 3pin male header.Features:•ATmega1280 16MHz CPU•128K FLASH, 8K SRAM and 4K EEPROM•USB interface and ISP socket•Built in 3A switch mode power supply (7V – 30V input)•70 I/O pins with male and female headers•Support for up to 48 servos•16x 10bit analog inputs•15x 8bit PWM outputs•1x I2C•6x External interrupt pins•4x Serial communication•Comes with Arduino boot-loader installedPin layout:Below is the board with all the pins labeled. Note that alternate functions are labeled in blue. The female header and the male pin closest to it are the signal pins. The center male pin is +5V and the pin closest to the outer edge of the PCB is ground.Programming the Spider controller:The Spider controller has been designed to be 100% compatible with the Arduino Mega and comes with the Arduino boot loader installed. The boot loader allows programs written in the Arduino IDE to be uploaded via the USB interface. More information about Arduino can be found here: /en/Guide/IntroductionThis manual assumes use of Arduino 0022 or later, which can be downloaded from here: /en/Main/Software.A full list of commands can be found here: /en/Reference/HomePage Communications:The Spider controller has 4x serial ports and 1x I²C interface. Serial interface 0 is used by the USB interface. Serial ports 1,2 and 3 are available for use with devices such as serial interface LCD’s,Xbee,Blue Tooth and WiFi modules or even other processors. Instructions on how to use these serial interfaces can be found here:/en/Reference/SerialThe I²C interface (SDA pin 20, SCL pin 21) allows the controller to communicate with devices such as external memory, real time clock (RTC), DC motor controllers and more. For the I²C interface to function properly 10K pullup resistors have been included. Some devices will include these resistors as well. Instructions on how to use the I²C interface can be found here:/en/Reference/WireDigital I/O pins:All 70 of the Spiders I/O pins can be used for simple digital inputs or outputs. By default, all pins except digital pin 13 have their mode set to input. When a pin is in input mode it is in a high impedance state (effectively open circuit). Digital pin 13 is set to output by the boot loader and has an LED attached. Although D13 can be used as an input the LED may interfere.Use the pinMode() command to change a pins mode between input and output. Use digitalRead() and digitalWrite() commands to read and write to these pins. Note: Analog pins A0 – A9 are digital pins D54 – D63.Writing a “1” to a digital pin while it is configured as an output will connect that pin to Vcc(+5V). Writing a “0” to a digital pin while it is configured as an output will connect that pin to ground (0V). Each pin is capable of sinking or sourcing up to 40mA maximum but care must be taken to limit the total current to 200mA. If you wish to drive large numbers of LEDs or other devices then the output pins should be buffered.Writing a “1” to a digital pin while it is set as an input will enable that pins internal pullup resistor. When enabled, an internal 20K resistor is connected between that pin and Vcc (+5V). Writing a “0” to that pin while configured as an input will disable the pullup resistor.Analog pins:Pins A0 to A15 are by default analog inputs. Each analog input has 10bit resolution and can measure the voltage on its pin. Input voltage should not exceed the analog reference voltage (default value is +5V).The input voltage is measured using the analogRead() command. The reference voltage is Vcc(+5V) by default. The reference voltage can be changed using the analogReference() command.PWM outputs:The Spider controller is capable of generating8bit resolution pulse width modulated outputs on digital pins D2 – D13 and D44 – D45. The output of a PWM pin is driven high and then low repeatedly with the duty cycle being adjusted to synthesize an analog output. By adding a simple RC filter to a PWM output a true analog output can be generated.PWM outputs are generated using the analogWrite() command. As the internal timers of the processor are used to generate these outputs they may be disabled by other commands using the same timer. Pin assignments should be planned to avoid conflicts.External interrupts:The Spider has 6 interrupt pins. Interrupts allow functions to be called only when an external event occurs. These pins are useful for monitoring devices such as encoders. The interrupts and their pins are:Interrupt 0 – D2Interrupt 1 – D1Interrupt 2 – D21Interrupt 3 – D20Interrupt 4 – D19Interrupt 5 – D18More information on the interrupt library can be found here:/en/Reference/InterruptsUsing the EEPROM memory:The Spider’s Atmega1280 includes 4K of EEPROM memory that can be used to store information while the power is off. More information on using the EEPROM library can be found here: /en/Reference/EEPROMUsing servos:All 70 I/O pins have a servo compatible 3 pin male header. The pin closest to the outer edge of the PCB is ground, the center pin is +5V and the inner most pin is the signal. This pin arrangement is also useful for powering sensors.Most miniature and standard servos require between 4.8V and 6V and will work happily directly from the PCB. High-powered servos requiring 6V or more should be powered via an external power source or directly from the battery.The Spider can drive up to 48 servos simultaneously using the Servo library:/en/Reference/ServoThe Servo command uses a timer for each 12 servos used starting with Timer 5. As these timers are also used for commands like PWM you need to plan your pin assignments to avoid conflicts.1 to 12 servos use timer 5 disabling PWM on pins 44,45 and 46.13 to 24 servos use timers 1&5 disabling PWM on pins 11,12,44,45 and 46.25 to 36 servos use timers 1,4&5 disabling PWM on pins 6,7,8,11,12,44,45 and 46.37 to 48 servos use timers 1,3,4&5 disabling PWM on pins 2,3,5,6,7,8,11,12,44,45 and 46. Servos can be assigned to any digital pin from D0 - D53.Analog pins A0 - A9 (D54 – D63) can also be used if required.A short tutorial including sample code for driving 48 servos can be found here:/node/25923Shields:The female headers on the Spider controller are spaced sothat a shield can be easily made from standard prototypePCB. Shields allow you add custom circuitry to your controller.A simple shield for powering servos directly from a battery orexternal power supply is now available.Alternative programming methods:Experienced users may choose to use WinAVR or AVR studioto program their controller directly via the ISP socket. Thebootloader can be removed which will fee up an additional 4Kof memory.WinAVR:/AVR Studio 5:/microsite/avr_studio_5/。
机器人说明提交版doc
一、六足蜘蛛救援机器人简介机器人是机构学、运动学、自动控制理论等学科发展水平的综合体现,利用机器人进行灾害、灾难性事件的救援、逃生,是当前国内外研究的热点问题之一。
汕头职业技术学院“机电创意吧”开发的“六足蜘蛛救援机器人”对蜘蛛的行走功能进行仿生,通过对伺服马达的精确控制模拟六足动物的行走步态,实现行走、转弯等各种步态行为,并能在各种地面环境下进行步态的智能调整,自动适应光滑地面、粗糙地面、瓦砾地面、台阶路面、建筑物倒塌现场等恶劣的路面环境,适用于建筑物火灾救援、地震中建筑物倒塌现场救援等。
本系统采用AVR单片机“ATMEGA16”作为核心控制,其优点为:(1)I/O口可设为推挽输出,输出电流大。
(2)大多数指令都是单时钟指令,运算速度快。
(3)片内集成A/D转换功能,便于光信号的多级度取样。
(4)定时器可以工作在CTC模式,可以立即更新数据,便于产生多路PWM 信号。
最后进行了系统联合调试,系统的软、硬件设计合理可行,为后续的研究工作奠定了基础。
1、结构优点六足蜘蛛救援机器人是智能化的多足步进式车辆,对各种恶劣路况适应性强;该系统具有多足结构,支撑稳定,负重能力强,具有可能的平衡效果;采用光敏传感器,根据光强自动调整运行方向,作为模型,已经模拟了根据环境情况自动做出动作反映的机器人功能;伺服电动机舵机作为动力,,效率和功率质量比高;单片机控制电路,满足复杂的控制功能,鲁棒性高;机械轮廓设计生动,爬行姿态优美。
拥有传统轮式机器人和履带式机器人无法企及的优势。
2、救援方面的应用(1)此六足机器人可以实现前进、后退、左右转弯等,利用光敏传感器根据环境光线强弱自动控制其行走方向,利用障碍物传感器,实现自动绕越障碍物的功能,并且在火灾中自动寻找火焰确定灭火目标。
(2)此机器人采用多足步进的方式前进,故可在各种复杂地形上爬行,到达轮式机器人和履带是机器人所无法到达斜度很高的斜坡、山地。
(3)在山地、戈壁上帮助驮运救援物资、药品。
蜘蛛机器人原理
蜘蛛机器人原理蜘蛛机器人是一种仿生机器人,它的设计灵感来源于蜘蛛的生物特性。
蜘蛛机器人可以在复杂的环境中自由移动,具有很强的适应能力和灵活性,被广泛应用于搜索救援、探索和监测等领域。
那么,蜘蛛机器人是如何实现这些功能的呢?接下来,我们将深入探讨蜘蛛机器人的原理。
首先,蜘蛛机器人的运动原理是仿生学的一个重要方面。
蜘蛛机器人通常采用多足结构,每条腿都配有独立的驱动装置,可以实现灵活的步态和多样的运动方式。
这种设计灵感来源于蜘蛛的八条腿,可以在不同的地形上行走,具有很强的适应能力。
同时,蜘蛛机器人的运动系统还可以模拟蜘蛛的爬墙能力,通过粘附或吸盘等装置实现在垂直表面上的移动,这为蜘蛛机器人在复杂环境中的探索提供了便利。
其次,蜘蛛机器人的感知原理也是其关键之一。
蜘蛛机器人通常配备了多种传感器,如红外线传感器、超声波传感器、摄像头等,可以实时感知周围环境的信息。
这些传感器可以帮助蜘蛛机器人避开障碍物、识别目标并进行定位,保证其在复杂环境中的安全行走和有效探索。
同时,蜘蛛机器人还可以利用这些传感器获取环境参数,为后续的数据分析和决策提供支持。
另外,蜘蛛机器人的智能控制系统也是其核心之一。
蜘蛛机器人通常配备了高性能的处理器和智能控制算法,可以实现对感知信息的快速处理和分析,根据环境变化实时调整运动轨迹和步态。
这种智能控制系统可以使蜘蛛机器人在复杂环境中做出快速反应,保证其在任务执行过程中的高效性和稳定性。
综上所述,蜘蛛机器人的原理主要包括运动原理、感知原理和智能控制系统。
通过仿生学的设计理念,蜘蛛机器人可以在复杂环境中实现自由灵活的移动,具有很强的适应能力和智能性。
未来,随着科技的不断发展,相信蜘蛛机器人将会在更多领域发挥重要作用,为人类社会带来更多的便利和帮助。
蜘蛛机器人
蜘蛛机器人作者:许梦来源:《课外生活(小学1-3年级)》2020年第02期蜘蛛机器人是一种仿生机器人,模仿的是我们生活中的大蜘蛛。
如今我们可以通过分解蜘蛛的肢体结构,模拟它们的动作习惯,来制作一个蜘蛛机器人,是不是很酷呢?今天的創客课堂就由小许老师带大家一起动手做一个蜘蛛机器人,领略一下蜘蛛机器人的风采。
课程开始啦!小许老师把制作蜘蛛机器人的材料发给大家后,大家都发出了疑问:就这些小小的零件可以组装成蜘蛛机器人吗?一点都看不出来哪里像蜘蛛啊。
一些家长带着孩子一起来体验,他们也发出了同样的疑问。
老师卖起了关子:创客教育的魅力就在于此,我们可以通过自己的双手,展开自己的想象力,完成既定的目标。
好吧,那就让我们从原理入手,开始我们的制作吧。
小许老师让大家将“蜘蛛”分成三个模块开始制作:核心、身体和腿。
需要什么零件就取什么零件,切不可多取零件,最后搞乱了程序,找不到需要的零件就不好办啦!反应快的同学们甚至自己对照着说明书,加快制作进程。
要知道制作的过程并没有想象中的那么简单,陪同而来的家长也在一旁指导自己的孩子,一起动手,既提高了孩子解决问题的能力,又增强了家长和孩子之间的情感交流。
活动进行了好一会儿,大家陆续完成了电路的连接和蜘蛛身体部分的组装,小许老师让大家启动电源看电机能不能动。
如果能驱动,就可以去做脚的部分;如果不能驱动,就要检查一下电路的连接或者齿轮的安装。
小许老师要求大家熟记每个流程,并且能够举一反三,就出现问题的原因进行解释并解决问题。
孩子们在老师和家长的引导下,顺利地完成了上述操作。
最后一步是安装蜘蛛的脚,小许老师告诉大家:“现实生活中不知道大家有没有细心观察,蜘蛛一般都是八条腿,那我们的蜘蛛机器人也要有八条腿哦。
大家组装好所有的腿,安装好固定支架后,蜘蛛机器人就算完成了,大家加油哦。
”同学们有的来不及回应老师,埋头制作着;有的举手询问老师,提出疑问,希望老师帮助解决。
不一会儿,大家的蜘蛛机器人都完成了,打开开关,蜘蛛机器人竟然真的能够爬行。
机器人的手动遥控说明书

机器人的手动遥控说明书首部分:引言感谢您选择我们的机器人产品。
本说明书将向您介绍如何正确操作机器人的手动遥控器。
在开始操作之前,请仔细阅读和理解本说明书内容,以确保您能够正确、安全地操作机器人。
第一部分:前置准备1. 解包首先,将机器人及其相关配件从包装盒中取出。
确保所有配件完整无损。
2. 电源将机器人连接至电源,确保电源稳定可靠。
注意检查电源适配器的电压要求,并匹配合适的电源。
3. 遥控器准备取出遥控器,并插入适当数量的电池。
请注意电池的极性。
第二部分:遥控器功能1. 电源开关遥控器上有一个电源开关,您可以通过切换电源开关来开启或关闭遥控器。
2. 动力和速度控制遥控器上配备有动力和速度控制杆。
您可以通过向前或向后推动控制杆来控制机器人的运动方向。
同时,您还可以通过调整控制杆的推动力度来调节机器人的运行速度。
3. 转向控制遥控器上配备有一个转向控制杆,您可以通过左右移动该控制杆来控制机器人的转向。
4. 功能按钮遥控器上还有一些功能按钮,其中包括启动/停止按钮、动作模式切换按钮、音量控制按钮等。
通过按下这些按钮,您可以控制机器人的不同功能。
第三部分:遥控操作步骤1. 开启机器人和遥控器首先,通过按下机器人电源按钮,将机器人开启。
接下来,切换遥控器电源开关,确保遥控器和机器人处于同一频道。
2. 调节速度通过动力和速度控制杆,向前或向后推动控制杆,调节机器人的运行速度。
3. 控制运动方向向前/向后推动动力和速度控制杆,可控制机器人前进或后退。
通过左/右移动转向控制杆,可控制机器人的转向。
4. 功能控制通过按下遥控器上的功能按钮,如启动/停止按钮、动作模式切换按钮等,控制机器人的不同功能。
请仔细阅读机器人产品说明书,了解各个按钮的具体功能和操作方式。
5. 停止操作当您使用完毕或需要暂停机器人时,请务必将遥控器上的动力和速度控制杆置于中立位置,并按下停止按钮,确保机器人停止运行。
附录一:常见问题解答Q: 遥控器无法开启机器人怎么办?A: 请检查遥控器电池是否安装正确,电池是否充电,以及遥控器电源开关是否打开。
机器人操作说明书

机器人操作说明书斯图加特航空自动化(青岛)有限公司中国-山东-青岛-高新技术开发区Tel:0532- Fax:0532-1.概要 (3)2.坐标系 (7)3.程序创建 (11)4.动作指令 (12)5.焊接指令 (16)6.摆动指令 (18)7.寻点指令 (20)斯图加特航空自动化(青岛)有限公司中国-山东-青岛-高新技术开发区Tel:0532- Fax:0532-概要•机器人•控制装置•示教器机器人机器人是由通过伺服电机驱动的轴和手腕构成的机构部件。
手腕叫做机臂,手腕的接合部叫做轴杆或者关节。
最初的3轴(J1.J2.J3)叫做基本轴。
机器人的基本构成,由该基本轴分别由几个直动轴和旋转轴构成而确定。
机械手腕轴对安装在法兰盘上的末端执行器(焊枪)进行操控。
如进行扭转、上下摆动、左右摆动之类的动作。
机械臂控制装置机器人控制装置,由电源装置、用户接口电路、动作控制电路、存储电路、I/O电路等构成。
用户在进行控制装置的操作时,使用示教操作盘和操作箱。
动作控制电路通过主cpu印刷电路板,对用来操作包含附加轴在内的机器人的所有轴之伺服放大器进行控制。
- 3 -示教操作盘- 5 -与菜单相关的键控开关与JOG 相关的键控开关与执行相关的键控开关与编辑相关的键控开关2.坐标系坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。
坐标系有关节坐标系、关节坐标系关节坐标系是设定在机器人的关节中的坐标系。
关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。
下图中的关节坐标系的关节值,处在所有轴都为0°的状态.关节坐标系刀具坐标系这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系.刀具坐标系必须事先进行设定.位定义时.将由机械接口坐标系代替刀具坐标系。
世界坐标系世界坐标系,是被固定在空间上的标准笛卡尔坐标系,其被固定在机器人事先确定的位置。
用户坐标系基于该坐标系而设定。
智能人形机器人的说明书

智能人形机器人的说明书1. 简介智能人形机器人是一种具备人类特征和动作的机器人,其兼具人工智能和机器人技术的创新结晶。
本说明书将详细介绍智能人形机器人的功能、使用方法和注意事项,旨在帮助用户充分了解并正确使用该机器人。
2. 功能介绍2.1 人形外观智能人形机器人造型逼真,外观酷似人类,身高约XXXcm,体重约XXXkg,体态灵活自如。
其具备活动的头部、四肢和手指,能够模仿人类各种表情和动作。
2.2 语音交互智能人形机器人内置新一代语音识别技术,能够听懂用户的指令并进行智能化回应。
用户可直接与机器人进行对话,实现简单问答、语音点播音乐等功能。
2.3 人脸识别通过先进的人脸识别算法,智能人形机器人可以轻松辨识出熟悉的用户,并根据用户的个性化设置提供定制化的服务。
2.4 运动控制智能人形机器人搭载精准的运动控制系统,可模拟人类的步态和姿势,实现灵活行走、跳跃等动作。
用户可通过遥控器或手机APP对机器人进行远程操控。
3. 使用方法3.1 开机与关机将智能人形机器人连接到电源后,按下电源按钮进行开机。
在使用完毕后,长按电源按钮3秒即可将机器人关机。
3.2 语音交互与机器人进行语音交互时,请确保语音环境安静,说话清晰。
用户可通过语音启动机器人,如“Hello, 机器人”,并进行对话。
3.3 手势控制智能人形机器人配备了手部触摸传感器,用户可通过手势控制机器人的动作和表情。
双击机器人手背可让其举起双手,向机器人手掌伸出手指可实现互动。
3.4 远程操控用户可通过手机APP或遥控器对智能人形机器人进行远程操控。
如需控制机器人行走,可通过手机APP或遥控器上的方向键进行控制。
4. 注意事项4.1 安全使用在使用智能人形机器人时,请确保使用环境宽敞平坦,远离易碎物品和危险区域,以免发生意外。
不要将机器人放置在潮湿或易燃物附近。
4.2 充电需求智能人形机器人内置锂电池,为了保证其正常运行,请按照说明书的要求进行充电。
禁止使用非原装充电器,以免引发电池过热或其他安全问题。
ARDUINO蜘蛛机器人搭建教程,仿生蜘蛛机器人的设计与实现

ARDUINO蜘蛛机器人搭建教程,仿生蜘蛛机器人的设计与实现成品展示(原文作者-MegaDAS)材料:1.- 订购的PCB电路板(资料可以下载)2.- 12个伺服电机,每条腿有3个伺服电机(伺服代码+机器人主程序代码可以下载)3.- 一个Arduino Nano4.- HC-06蓝牙模块5.- 一个OLED显示屏6.- 5mm RGB LED7.- 单排40Pin 2.54 mm公针式接头连接器8.- 机器人身体(3D打印机文件可下载)9.-Android应用程序(资料可以下载)简介由于每个人都注意到了机器人技术的高速发展,我们决定将你们带到机器人和机器人制造的更高层次,我们刚开始做一些基本的电子项目和像PICTO92这样的基本黑线机器人,以便让你对电子产品有点熟悉,并发现自己能够发明自己的项目,转到另一个层次,我们已经开始使用这个概念中的基本机器人,但如果你的程序更深入,它将变得有点复杂。
由于这些小工具在网上商店非常昂贵,我们提供一步一步的指导,指导你们制作自己的Spiderbot。
该项目定制自己的PCB,这样会非常方便,可以改善我们机器人的外观,本指南中还有PCB文件和程序还有代码,都已经打包好,私信88151自动获取地址,我们只用了7天就完成了这个项目,两天完成了硬件制作和组装,五天时间来准备代码和android应用程序。
特点仿生蜘蛛机器人是模仿多足的动物的运动的方式的特殊一种的机器人。
经过调查显示,在地球上有大约二分之一的陆地那些常规的载具,像汽车火车履带式的载具都无法到达。
自然界中却有很多生物却可以自由的活动在那里。
因此,仿生机器人的运动方式更有着其他不具有的能力优势,仿生机器人运动方式流动性良好,能适应各种崎岖路面。
仿生蜘蛛机器人在崎岖和路况极差的地面上的运动速度仍然很快,而且能耗较少。
主要执行器-伺服电机伺服电动机不是特定类别的电动机,尽管术语伺服电动机通常用于指代适用于闭环控制系统的电动机,一般而言,控制信号是方波脉冲序列,控制信号的公共频率为44Hz,50Hz和400Hz,正脉冲宽度决定伺服位置,大约0.5ms的正脉冲宽度将使伺服喇叭向左偏转尽可能多的偏差(通常约45至90度,取决于所讨论的伺服),正脉冲宽度约2.5ms至3.0ms将使伺服器尽可能向右偏转,大约1.5ms的脉冲宽度将使伺服将中性位置保持在0度,输出高电压通常介于2.5伏和10伏之间(典型值为3V),输出低电压范围为-40mV至0V。
蜘蛛仿形机械手设计说明书

蜘蛛仿形机械手设计说明书.鄂东职业技术学院设计说明蜘蛛仿形机械手设计说明书作品名称: 仿形机械手小组成员:指导老师:时间:二О一二年十月七日 , 十一月十日共五周 ..目录摘要 ..................................................................... .. (3)Abstract ............................................................... ............................. 4 一、研究背景 ..................................................................... . (5)1.1(现实情况 ..................................................................... .. (5)1.2机器人发展过程 ..................................................................... .. (6)1.3.机械手在生产线上的应用 ..................................................................... . (8)1.4今后我国机械手市场发展趋势 ..................................................................... .................... 9 二、机械手设计过程 ..................................................................... (11)3.1 设计理论 ..................................................................... (11)3.2 分工设计 ..................................................................... (11)3.2.1、连杆的设计 ..................................................................... (11)3.2.2、齿轮箱 ..................................................................... .. (12)3.2.3、执行件 ..................................................................... .. (13)3.2.4、支柱 ..................................................................... (13)3.2.5、液压缸 ..................................................................... .. (14)3.3 总装 ..................................................................... .. (15)3.3.1、齿轮箱装配 ..................................................................... (15)3.3.2连杆与传动件的装配 ..................................................................... .. (15)3.3.3执行件与主体的装配 ..................................................................... .. (16)3.3.4连杆的装配 ..................................................................... ....................................... 16 四、零件加工 ..................................................................... .. (17)4.1零件的分析 ..................................................................... .. (17)4.2数控编程...................................................................... .. (17)4.3工艺卡片...................................................................... .. (18)4.4功能参数...................................................................... .. (21)4(5刀具轨迹 ..................................................................... (30)4.6 NC数据 ..................................................................... . (32)总结 ..................................................................... .................. 34 参考文献 ..................................................................... . (36)..摘要近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
仿生蜘蛛机器人的设计与研究-新版.pdf

20
4.5 足的设计 ................................................
22
4.6 连接杆的设计 ............................................
22
4.7 固定片的设计 ............................................
7
2.1.1 仿生蜘蛛机器人的研究方法及思路 .....................
7
3 整体设计方案 ..................................................
9
3.1 工作原理分析 .............................................
9
3.1.1 三角步态原理分析 ...................................
9
3.1.2 机器人走动步态分析 .................................
9
3.2 机器人机构总体设计 .......................................
ii
目 录 .........................................................
iii
1 绪 论 ........................................................
1
1.1 课题背景及目的 ...............................................
16
3.4.2 舵机控制方法 ......................................
矿产
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
"蜘蛛侠"仿生机器人设计说明书参赛者:江晓通李江全张其指导老师:何毅斌洪汉玉所在学校:武汉工程大学目录第一章引言 (3)1.1研究背景 (3)1.2国内外研究成果 (3)第二章仿生蜘蛛机器人的结构设计 (3)2.1设计的功能要求及分析 (3)2.2总体设计 (3)2.2.1结构分布 (3)2.2.2仿生蜘蛛机器人尺寸 (3)2.3详细设计 (4)2.3.1普通步行足 (4)2.3.1.1结构 (4)2.3.1.2驱动 (5)2.3.1.3减震器 (8)2.3.2多功能复合足 (9)2.3.2.1结构 (9)2.3.2.2驱动 (10)2.3.2.3复合足和减震器 (10)2.3.3躯干及外壳 (10)第三章步态分析及控制方案 (11)3.1蜘蛛的步态研究 (11)3.2控制方案 (13)第四章仿生蜘蛛机器人尺寸与性能分析 (14)4.1动作能力分析 (14)4.2设计合理性 (14)4.2.1驱动部分 (14)4.2.2机构原理 (14)4.2.3结构与强度 (14)4.2.4重量 (16)4.3设计可行性 (16)4.4创新性 (16)参考文献 (18)第一章引言1.1研究背景在如今的科技飞速发展的时代,机器人早已成为家喻户晓的科技产品,它被广泛的应用于各种场合和领域,像生产业、建筑业,或是危险的工作环境。
而将仿生学的一些技术应到机器人上做成的仿生机器人则能够在某些方面的更好的服务于人。
1.2国内外研究成果在机器人领域发展最好的应该是美国、日本了。
美国的仿生军用机器狗做的已经很成熟了,能够行走在各种不同地形,草地、雪地、山地等都能够平稳的行走,其自平衡能力允许它受到一定的冲击却仍能马上调整好身体而继续平稳行走。
日本的仿生机器人也十分的先进。
国内的机器人也在迅速的发展,一些仿生机器人也能够在自己的领域发挥它独特的功能。
第二章仿生蜘蛛机器人的结构设计2.1设计的功能要求及分析通过对蜘蛛结构和行为的研究,设计的仿生蜘蛛机器人可以用于多种场合。
其主要技术问题在于让机器人能够灵活的完成行走、转向、越障、爬坡等基本动作,同时还必须具有抓取物体、打钻等功能,也有视频、照明、太阳能电池板等设备增强功能。
2.2总体设计2.2.1结构分布蜘蛛机器人主要由躯干和八条腿组成。
模仿蜘蛛的八条腿的布局方式,设计了如图1的装配布局。
每条腿都有足够的活动空间,互不干涉,为其运动灵活性提供了可能。
其中,后三对腿为普通步行足,一对前腿为多功能复合足,左前腿具有抓取的功能,右前腿具有钻的功能。
另外躯干上装有视频、照明、太阳能电池板,躯干尾端留有一个储物空间。
2.2.2仿生蜘蛛机器人尺寸躯干的宽度为250mm,长度为450mm。
m。
整个机器人的占地面积约为0.52单只腿的最大长度约为320mm,最小总长度约260mm,最大跨越高度约为80mm。
图12.3详细设计2.3.1普通步行足2.3.1.1结构蜘蛛机器人的普通步行足模仿蜘蛛的腿的结构,分为四个肢节、四个关节,如图2。
从上到下依次为根关节、基节、髋关节、股节、膝关节、胫节、胫关节、足。
图2根关节是连接躯干和腿的部位,是一个转动副,有水平转动自由度;髋关节是连接基节和股节的部位,是一个转动副,有竖直转动自由度;膝关节是连接股节和胫节的部位,是一个转动副,有竖直转动自由度;胫关节是连接胫节和足的部位,是一个转动副,有竖直转动自由度。
2.3.1.2驱动基节和躯干的相对水平转动自由度由如图3所示的机构控制,其中是1电动机,固定在机架4上,2是谐波减速器,将电动机的输出速度减小,3是端面推力球轴承。
图3基节和股节的相对竖直转动自由度由如图4所示的机构控制,其中是液压杆组合,液压杆杆套连接基节,液压杆杆轴连接股节。
图4股节和胫节的相对竖直转动自由度有如图5所示的机构控制,其中实液压杆组合,液压杆杆套连接股节,液压杆杆轴连接胫节。
图5足和胫节的相对竖直转动自由度由如图6所示的机构控制,其中是1电动机,固定在足上,2是谐波减速器,将电动机的速度减小,3是齿轮组合,将转矩输出。
图62.3.1.3减震器为了缓冲行走时足和地面的刚性碰撞,在足上添加了液压减震器,如图7。
减震器杆和分油挡板在减震器套内,套内装有液压油。
当受到较大的冲击时,液压减震器套内的一侧的液压油通过分油挡板进入到另一侧来改变自身长度,从而到达缓冲的作用。
图72.3.2多功能复合足2.3.2.1结构蜘蛛机器人的多功能复合足和普通步行足一样,分为四个肢节、四个关节,如图8。
从上到下依次为根关节、基节、髋关节、股节、膝关节、胫节、胫关节、复合足。
各个关节的作用均和普通步行足一样。
图82.3.2.2驱动基节和躯干的相对水平转动自由度的控制和普通步行足一样,如图3。
基节和股节的相对竖直转动自由度、股节和胫节的相对竖直转动自由度、复合足和胫节的相对竖直转动自由度,均由电动机驱动,并由谐波减速器进行降速,经过齿轮组合再输出,如图6。
2.3.2.3复合足和减震器复合足在有两个足,在行走是可以使用和普通步行足一样的足来行走,在执行任务时,可以转为为功能足,左足为抓手,右足为钻头,均采用液压驱动。
同时,步行或执行任务时,都有减震器来进行缓冲。
如图9。
图92.3.3躯干及外壳躯干底板上固定有控制腿水平转动自由度的电动机。
另外液压油泵也安装在上面,用来提供液压杆的动力。
躯干尾端的储物室又可以开启的门,用来存放相关的物品。
也装有可伸缩的摄像头。
如图10.图10躯干外壳上装有太阳能电池板,可以将太阳能转化为电能供机器人使用。
另外外壳上也装有照明装置,可以在黑夜中工作。
如图1。
第三章步态分析及控制方案3.1蜘蛛的步态研究蜘蛛行走方式比较自由,有时候用的双四足步态,有时候是等相位步态。
地形环境不同,蜘蛛步态并没有很确定的用一种固定的周期步态。
由于双四足步态(波形步态)与等相位步态、后退波形步态、自由步态相比,是效率最高和稳定性最好的步态(见表1的分析),所以在行走时蜘蛛机器人采用了双四足步态。
把蜘蛛机器人的腿分为两组,如图12,行走时同位一组的四条腿动作一样,并与另一组的腿相协调,当第一组腿抬起时,第二组腿是着地的,如图13,白色代表腿是悬空的,黑色代表腿是着地的。
具体行走方案为,第一组腿抬起,向前摆动,落下,第二组腿抬起,第一组腿向后蹬,第二组腿向前摆动,落下,第一组腿抬起,第二组腿向后蹬。
如此循环下去即所谓的双四足步态。
表1图12图13当蜘蛛机器人的两只多功能复合足处于工作状态时,机器人也可以用后三对普通步行足行走,此时采用三角步态。
三角步态也属于波形步态。
这里对三角步态的原理不再详细说明。
3.2控制方案由于蜘蛛机器人的每只腿都是可以单独动的,而每只腿之间应该有双四足步态的配合,因此采用芯片来控制每只腿上的每个驱动,是每只腿能够完成抬脚、落脚、向前摆动。
向后蹬的动作。
可以在芯片内设置一个向前行走的程序模块,让仿生蜘蛛机器人可以用双四足步态或三角步态向前行走;同时也可以设置向左转、向右转的程序模块,机器人可以进行左、右转弯;另外设置一个自动或手动控制的程序模块,当自动行走时,能够通过摄像头判断路况来自己选择直走还是转弯,当手动操作时,根据操作者的要求做出相应的判断;在手动模式下可以设置一个工作程序模块用于对多功能复合足的控制,从而完成相关的功能;也可设置一个越障模式,对一定高度的障碍物直接越过。
控制原理图如图14。
图14第四章仿生蜘蛛机器人尺寸与性能分析4.1动作能力分析由于仿生蜘蛛机器人的每只腿是可以单独的抬起、落下、向前摆、向后蹬的,每个关节都有其相应的自由度,每只腿的总自由度为四个。
所以其灵活性十分好,能够根据需要进直走、转弯、越障等动作,只要能设置好芯片的程序,蜘蛛机器人能完成各种不同的行为动作。
而恰当的选择了液压泵和电动机共同驱动,使得动作稳定准确而快速。
4.2设计合理性4.2.1驱动部分仿生蜘蛛机器人的每只脚的驱动有四个部分,两个液压驱动,两个电动机驱动。
液压驱动有很多特点:传动功率大,低速、平稳。
在速度满足机器人的动作要求的情况下,使用液压驱动能够承载更重的机器人,同时不需要减速就可以满足要求,而其工作十分平稳,不会对机器人的行走造成干扰;另外其传动布置灵活。
由于液压管的布置可以很自由,所以在布置液压管和油泵的时候很灵活,利于设计。
但液压驱动的成本高,在满足功能要求的情况下,采用了部分电动机驱动。
并采用的谐波减速器来进行传动。
谐波齿轮传动具有较大传动比且体积小、重量轻、结构简单、承载能力大、传动平稳等特点。
因此在胫关节和根关节出采用电动机加谐波减速器的方式驱动也是十分合理并且有效的。
4.2.2机构原理液压驱动中的采用了单杆活塞式液压缸结构(即图4、图5中的机构)。
该机构的应用相当于一个曲柄滑块机构,能够有效的将液压杆的滑动转变为肢节的的转动。
因此,单杆活塞式液压缸结构的应用是十分合理并且高效的。
4.2.3结构与强度通过用inventor的应力分析得到如下的报告。
采用的材料有球墨铸铁、合金钢、钢(高强度低合金)、低炭钢、炭钢。
图15单腿应力分析图16单腿位移分析图17单腿等效应变分析由以上分析可得,仿生蜘蛛机器人的单腿能承受的强度是复合要求的。
4.2.4重量整个机器人采用空腔式布局。
对腿上的肢节也是尽量在满足强度的情况下节省材料,改变外型,减小厚度,从而使重量更轻。
4.3设计可行性仿生蜘蛛设计所涉及的技术主要有液压传动与控制、谐波减速器设计、单片机控制等。
这些技术都十分的成熟,完全可以用于仿生蜘蛛机器人的设计。
另外太阳能电池板的应用也提供了一种能源获取方案,摄像头、照明设备也完全可以在仿生蜘蛛机器人上发挥它们各自的作用。
4.4创新性蜘蛛机器人大胆的采用了液压泵和电动机相相结合的驱动方式,并且合理的布置了液压杆的位置,既能够完成动作要求,又很美观。
为了节约成本,并没有全部用液压驱动,电动机加谐波减速器的组合也是很理想的驱动原件。
从而使动作灵活准确。
在足的部位采用了液压减震器,能够缓冲地面的刚性碰撞。
机器人本身有一定的重量,长期的刚性碰撞肯定会减少其使用寿命,加入减震器是很有必要的。
将足尖底部设计成一个小圆平面,然后用曲面过渡到足的上部。
这样的足不会陷进一些较软的地面环境,而抓地力也很强,能够完成一定坡度的爬坡和一定高度的越障。
另外,足上的护板对足也有一定保护作用。
为了能够满足一些功能要求,将两只前腿设计成了多功能复合足,除了正常行走之外,还有打钻和抓取的功能,为机器人的进一步开发提供了可能,可以让其应用于更广阔的领域。
采用芯片的控制方案也让机器人有很自由的动作行为,既可以采用双四足步态行走,又可以采用三角步态行走。
对转弯、越障、爬坡也容易控制。
参考文献【1】王刚.孟庆鑫.多足仿生机械蟹步态仿真及样机研制[D].哈尔滨:哈尔滨工程大学.2008:31-33.75-76.【2】胡厦.金波.六足步行机器人直行关键技术研究[D]浙江:浙江大学.2008:12-13.【3】王刚.张立勋.王立权.八足仿蟹机器人步态规划方法[J].2011-4:32(4).488-491.【4】孙恒.陈作模.葛文杰.机械原理[M].北京:高等教育出版社.2006:14-16.231-232.【5】王积伟.章宏甲.黄谊.液压与气压传动[M].北京:机械工业出版社.2005:68-84. 109-112.【6】吉爱红.戴振东.周来水.仿生机器人的研究进展[J]2005-5:27(3).285-287.【7】马燕.杨海.一种关节齿蜘蛛支腿[Z].实用新型专利.2010-6:1-2.。