一种六自由度机械臂避障算法研究
基于改进蚁群算法的六自由度机械臂路径规划
㊀第52卷第1期郑州大学学报(理学版)Vol.52No.1㊀2020年3月J.Zhengzhou Univ.(Nat.Sci.Ed.)Mar.2020收稿日期:2019-01-10基金项目:工信部智能制造综合标准化与新模式应用项目(2017ZNZX02)㊂作者简介:赵华东(1978 ),男,河南开封人,副教授,主要从事先进制造技术研究,E-mail:huadong @;通信作者:雷超帆(1994 ),男,河南许昌人,硕士研究生,主要从事工业机器人技术研究,E-mail:329641044@㊂基于改进蚁群算法的六自由度机械臂路径规划赵华东,㊀雷超帆,㊀江㊀南(郑州大学机械工程学院㊀河南郑州450001)摘要:针对空间六自由度机械臂路径规划问题,提出了一种基于改进蚁群算法的路径规划方法㊂以ABB1410型号的六自由度工业机械臂为研究对象,建立D-H 运动模型以求解正㊁逆运动学方程㊂设计了碰撞检测算法,使用改进后的蚁群算法进行路径规划,把机械臂末端的运动轨迹看作是依次经过规划路径的点的集合,求解机械臂运动的反解,得到相应的关节转角,实现了机械臂的路径规划㊂通过仿真实验验证了该方法实现六自由度机械臂路径规划的有效性及可行性㊂关键词:ABB1410型号机械臂;碰撞检测;蚁群算法;路径规划中图分类号:TP241㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀文章编号:1671-6841(2020)01-0120-07DOI :10.13705/j.issn.1671-6841.20190120㊀引言在工业4.0大背景下,工业机器人技术及产品已成为制造业中不可或缺的部分,同时也引发了国内外专家对相关技术的研究热潮㊂机械臂的路径规划问题是指在满足工作条件的基础上,寻找一条从初始点到目标点距离最短且能避开障碍的最优路径[1]㊂具有代表性的规划方法主要有自由空间法和人工势场法等[2]㊂文献[3]借助C 空间法的思想,构造障碍物映射至C 空间的转换关系,实现机械臂在线实时避障,但这种空间映射方法的计算量较大,尤其是对于关节数较多的机械臂而言,适用性较差㊂文献[4]通过构造引力场和斥力场,有效避免了碰撞的发生,很好地解决了机械臂在处理全局规划中的避障问题,但由于势场法的固有缺陷,该方法容易陷入局部最小处,规划效果欠佳㊂文献[5]提出了基于速度的C 空间法来实现动态环境中的路径规划,但该方法仅适用于移动机器人㊂文献[6]利用A ∗算法与动力学约束相结合,达到避免碰撞实现路径规划的目的,但是这种方式需要进行大量的动力学计算,且公式推导极其复杂,不适用于多关节型机械臂㊂本文以ABB1410型号机械臂为研究对象,使用D-H 法构建机械臂模型,进而推导出其正㊁逆运动学变换公式,实现末端执行器从空间坐标至关节角度的映射;通过合理的建模方式对机械臂和障碍物进行简化,设计碰撞检测方法;对蚁群算法进行了改进,以此实现机械臂在工作空间中的避障路径规划,并通过模拟机械臂的避障运动,对该方法的可行性进行了验证㊂1㊀机械臂运动学研究1.1㊀D-H 运动模型的建立D-H 法是由Denavit 和Hartenberg 于1955年设计的一种表示机械臂各连杆间运动关系的通用方法㊂其基本原理是在机械臂的关节处设定坐标系来表示相连刚体杆件的空间位姿,使相邻两连杆间的空间位置关系通过4∗4阶层的齐次坐标变换矩阵进行描述[7]㊂通过六连杆间依次变换,最终得到机械臂末端执行器相对于底座的位姿㊂以ABB1410型号机械臂为例,建立的D-H 运动模型如图1所示,连杆参数的数值如表1所示㊂㊀第1期赵华东,等:基于改进蚁群算法的六自由度机械臂路径规划图1㊀ABB1410型号机械臂的D-H 运动模型Figure 1㊀D-H motion model of ABB1410manipulator 表1㊀连杆参数的数值Table 1㊀Number of connecting rod parameters 连杆a i /mm αi /(ʎ)d i /mm θi 转角范围/(ʎ)147590150θ1-170~170260000θ2-70~653120900θ3-65~7040-90720θ4-150~15050900θ5-115~11560085θ6-300~3001.2㊀正运动学分析机械臂的正运动学是指在已知机械臂各个连杆的尺寸大小后,给定其关节处的转角㊁速度㊁加速度等参数,计算出末端执行器处的位姿和运动状态[8]㊂假设某时刻机械臂六个关节的转动角度分别为θ1㊁θ2㊁θ3㊁θ4㊁θ5㊁θ6,已知相邻两杆间表示位姿的齐次变换矩阵为T n =Rot (z ,θn )Trans (0,0,d n )Trans (αn ,0,0)Rot (x ,αn )=cos θn -sin θn cos αn ㊀sin θn sin αn αn cos θn sin θn ㊀cos θn cos αn -cos θn sin αn αn sin θn 0sin αn cos αn d n 0㊀0㊀00éëêêêêêêùûúúúúúú㊂㊀㊀根据表1中的连杆参数,可以得到ABB1410型号机械臂六个关节间的转换关系为0T 1=cθ1-sθ100sθ1㊀cθ1000㊀01d 10㊀001éëêêêêêêùûúúúúúú,1T 2=cθ2-sθ2㊀000㊀0-10sθ2㊀cθ2㊀000㊀0㊀01éëêêêêêêùûúúúúúú, ,5T 6=cθ6-sθ6000㊀0-1-d 6sθ6㊀cθ6000㊀001éëêêêêêêùûúúúúúú,式中:c ㊁s 分别表示余弦函数和正弦函数;n -1T n 表示相邻两关节间的坐标转换关系㊂在求出六个连杆间的转换关系后,不难求得末端执行器与基坐标系之间的转换公式为0T 6=0T 11T 22T 33T 44T 55T 6=r 11r 12r 13p x r 21r 22r 23p y r 31r 32r 33p z 0001éëêêêêêêùûúúúúúú,式中:[r 11r 12r 13]㊁[r 21r 22r 23]㊁[r 31r 32r 33]分别为执行器上坐标系方向在基坐标系方向上的投影;[p x p y p z ]T 表示执行器坐标系原点相对于机械臂的基坐标系的空间位置坐标㊂1.3㊀逆运动学分析逆运动学是指在已知机械臂末端执行器坐标系的位姿矩阵后,通过对正运动学变换矩阵的反向求解,得到机械臂各个关节处的旋转角度㊂采用矩阵逆乘的方法求解逆运动学解的过程为T =0T 11T 22T 33T 44T 55T ,T 1-1T =1T 22T 33T 44T 55T ,T 1-11T 2-1T =2T 33T 44T 55T ,︙T 1-11T 2-12T 3-13T 4-1T =4T 55T 6㊂ìîíïïïïïïïï121郑州大学学报(理学版)第52卷㊀㊀由于推导过程烦琐,其具体过程就不在本文中展开叙述㊂根据Picper 准则可知,机械臂逆运动学的解并不具有唯一性㊂因此,在实际应用中,应根据机械臂具体的避障要求以及路径规划的运动轨迹来判断机械臂所对应的逆解㊂2㊀机械臂碰撞检测图2㊀机械臂简化模型Figure 2㊀Simplified model of the manipulator 2.1㊀机械臂与障碍物模型简化采用长方体包络法将机械臂与障碍物抽象简化㊂具体做法是将机械臂连杆和工作空间中需要规避的不规则形体的障碍物用最小体积的六面体包裹起来㊂为了简化运算,将包络机械臂连杆的长方体看作一条直线,而将连杆长方体的边长叠加到障碍物长方体中㊂机械臂简化模型如图2所示㊂最终,只需判断连杆直线与包络障碍物长方体的六个平面间的位置关系,即可完成碰撞检测㊂2.2㊀碰撞检测假设关节i 和i +1处的坐标分别为p 1(x 1,y 1,z 1)和p 2(x 2,y 2,z 2),那么连杆l i 所处直线的方向为H =(x 2-x 1,y 2-y 1,z 2-z 1)㊂长方体某一平面的四个顶点分别为s 1(x 1,y 1,z 1)㊁s 2(x 2,y 2,z 2)㊁s 3(x 3,y 3,z 3)㊁s 4(x 4,y 4,z 4),该平面S 的法向量为M (m 1,m 2,m 3)㊂运用空间几何学知识可知,当M ㊃H =0时,直线与平面平行;当M ㊃H ʂ0时,说明直线与平面相交,必定存在着某个交点p 0(x 0,y 0,z 0)㊂交点为碰撞点需要同时满足两个条件:其一,交点必须处于连杆线段上;其二,交点要在空间平面的内部㊂连杆线段i 若要与平面S 相交,需要满足以下条件:min(z 1,z 2)<z 0<max(z 1,z 2),min(x 3,x 4)<x 0<max(x 3,x 4),min(y 3,y 4)<y 0<max(y 3,y 4)㊂ìîíïïïï㊀㊀在完成连杆线段i 与平面S 的碰撞判断后,接下来用同样的方法判断连杆l i 与障碍物长方体的其他五个平面是否碰撞,对于机械臂另外五个连杆的判断也同样采用这种方法进行求解㊂图3㊀三维空间规划Figure 3㊀Three-dimensional space planning 3㊀三维空间建模三维空间建模的具体方法如下:沿坐标轴方向构造包含初始点㊁目标点及障碍物的三维空间立方体区域ABCD-EFGH ,该立方体区域即为作业空间的规划区域㊂在完成作业空间的规划后,采用等分法对空间进行划分,得到三维路径规划所需要的路径节点㊂首先沿AE 边线将空间ABCD-EFGH 进行等距划分,得到n 个平面Πi (i =1,2, ,n ),然后再沿AB 边线对这n 个平面进行m 等分,最后沿AD 边线进行m 等分,这样就将平面Πi (i =1,2, ,n )离散成m ˑm 个栅格,三维空间规划如图3所示㊂通过上述步骤,将三维规划空间离散为一系列三维空间点的集合㊂4㊀基于改进蚁群算法的路径规划4.1㊀基本蚁群算法蚁群算法是模拟蚁群觅食行为的启发式智能算法[9-10],该算法的实现步骤如下㊂221㊀第1期赵华东,等:基于改进蚁群算法的六自由度机械臂路径规划(1)初始化算法参数㊂在搜索之前,需要给蚁群算法的几个重要参数赋予初始值,初始值合理与否直接影响着算法搜索的性能[11],蚁群算法的重要参数包括蚂蚁数量㊁信息素启发值㊁适应度启发值及信息素衰减系数㊂(2)算法搜索过程㊂蚂蚁从当前点移动至下一路径点时,根据可视域内各个点的选择概率来决定移动目标,蚂蚁k在t时刻从i点移动至j点的概率可以表示为P k ij =[τij(t)]α㊃[δij(t)]βðjɪallowed[τij(t)]α㊃[δij(t)]β,jɪ{allowed},式中:集合{allowed}表示蚂蚁k下一步所能选择的路径节点的集合;τij(t)表示在t时刻从i点至j点路径上的残余信息素大小;δij(t)表示在t时刻从i点至j点路径上的能见度;α表示信息素启发值;β表示适应度启发值㊂(3)局部信息素更新㊂每当蚂蚁完成一次路径的搜索,就要按照局部信息素更新策略对经过路径上的信息素进行更新,更新公式为τij=(1-ξ)τij,其中:τij表示以点(i,j)为信息素载体的信息素浓度;ξ表示信息素衰减系数㊂(4)全局信息素更新㊂当一次迭代中的蚂蚁都完成从出发点到终点的搜索后,要进行全局信息素的更新,更新公式为τij(t+1)=(1-ρ)τij(t)+Δτij(t),其中:ρ表示信息素挥发系数㊂4.2㊀蚁群算法的改进4.2.1㊀建立可视域搜索空间㊀为降低搜索空间的复杂程度,将机械臂末端执行器的运动简化为沿x㊁y㊁z三个轴方向上的直线运动,其中沿x轴方向的最大移动距离为L x,max,沿y轴方向的最大移动距离为L y,max,沿z轴方向的最大移动距离为L z,max㊂这样,当蚂蚁对下一路径点进行搜索时,就会相对于当前位置形成一个可视域搜索空间㊂按照此种方法,将蚂蚁的搜索限制在一定区域内,简化了搜索空间,提高了蚁群算法的搜索效率㊂4.2.2㊀设置信息素浓度τij的上㊁下限㊀在蚁群算法的寻优过程中,路径上残余信息素浓度τij的大小严重影响着蚂蚁的判断,决定着收敛结果的质量㊂当信息素浓度过高时,蚂蚁搜索将会失去随机性,算法陷入局部最优;反之,当信息素浓度过低时,算法容易陷入早熟收敛㊂因此,通过对信息素浓度设置上㊁下限,避免算法的早熟和局部最优,增减算法的正反馈作用,公式如下:τij(t+1)=τmax,τij(t)ȡτmax,τx,τmin<τij(t)<τmax,τmin,τij(t)ɤτmin,ìîíïïïï式中:τx表示局部或全局更新计算所得到的信息素浓度大小㊂4.2.3㊀挥发系数ρ的自适应调节㊀挥发系数ρ反映了蚁群的全局搜索能力和算法收敛的速度㊂当ρ值较大时,信息素的浓度衰减较快,由正反馈机制占据主导地位,算法随机性较差;而当ρ值较小时,算法将陷入随机搜索,正反馈作用降低,进而导致收敛速度减慢㊂对ρ值采用自适应调节策略,公式如下:ρ(N+1)=ξρ(N),ξρ>ρmin,ρmin,其他, {式中:ξɪ(0,1);N表示算法的迭代次数㊂5㊀仿真结果与分析5.1㊀算法实现流程为了验证本文方法实现六自由度机械臂路径规划的可行性,对其进行了仿真验证㊂将机械臂工作空间抽象化,使用长方体包络法简化障碍物模型,通过蚁群算法在已知工作环境中寻找一条合适的规划路径,得到组成路径的节点坐标,再将该节点依次作为机械臂执行器的移动目标点,根据逆运动学计算公式求解每一目标点所对应的关节角度,可得到多组关节角度解的集合㊂任选一组解进行碰撞检测,若不发生碰撞,则该解满足路径规划需求,否则进行下一组解的碰撞检测㊂若所有的解均不满足规划需求,则将该路径节点视为障碍点,重新进行路径规划,直至所有路径节点均不发生碰撞㊂321郑州大学学报(理学版)第52卷图4㊀算法实现流程Figure 4㊀Algorithm implementation flow chart 算法实现流程如图4所示㊂5.2㊀仿真结果分析利用仿真环境为Matlab 2014b,CPU 型号为Inter i5-6500,内存为8GB 的计算机分别对优化后的蚁群算法和普通蚁群算法进行仿真对比㊂机械臂工作空间为2m∗2m∗1m,离散点划分数量为20∗20∗10㊂初始点坐标为(6,5,2),目标点坐标为(13,6,10)㊂根据文献[11]中的实验结果设置算法参数,蚁群数量m 为50,迭代次数N 为100,信息素启发值α为1,适应度启发值β为5,挥发系数ρ为0.7,仿真结果对比如图5所示㊂观察仿真结果可知,在相同的参数条件下,改进蚁群算法搜索到的路径长度更短,且迭代速度更快㊂改进蚁群算法和普通蚁群算法的路径长度分别为1.941m 和2.119m,迭代次数分别为38次和65次,寻优时间分别为1.636s 和2.823s㊂图5㊀仿真结果对比Figure 5㊀Comparison of simulation results㊀㊀选择改进蚁群算法路径规划的结果作为机械臂的运动路径,机械臂在路径节点的位姿坐标和关节转角如表2所示㊂机械臂在沿规划路径运动的过程中,六个关节转角随时间的变化曲线如图6所示㊂表2和图6中关节转角的数据均为实际转角与π的比值㊂结果表明,每个关节角的变化都是平滑且连续的曲线,并未有突变情况发生,符合机械臂运动学规律,路径规划有效㊂根据上述路径规划结果,利用RobotStudio 软件模拟机械臂的避障运动过程,观察可知,机械臂机身及末端执行器均未与障碍物发生碰撞,证明碰撞检测算法有效㊂机械臂运动仿真过程如图7所示㊂结果表明,在采用本文的改进蚁群算法对空间六自由度机械臂进行避障路径规划时,能够快速㊁准确地搜寻到一条符合机421㊀第1期赵华东,等:基于改进蚁群算法的六自由度机械臂路径规划㊀㊀表2㊀路径节点的位姿坐标和关节转角Table 2㊀Pose coordinates and joint angles of the path nodes 节点(x ,y ,z )(R x ,R y ,R z )是否碰撞转角1转角2转角3转角4转角5转角61(6,5,2)(1,-1,-1)否0.6947-0.8960-0.1760 3.14160.85130.69472(8,5,4)(1,-1,-1)否0.5586-0.4870-0.4700 3.14160.61270.55863(9,4,6)(1,-1,-1)否0.4182-0.3360-0.3390 3.14160.89550.41824(9,2,7)(1,-1,-1)否0.2187-0.1650-0.3960 3.1416 1.00920.21875(9,0,7)(1,-1,-1)否0.0014-0.1300-0.4360 3.1416 1.00470.00156(9,-2,8)(1,-1,-1)否-0.2180-0.1110-0.3130 3.1416 1.1475-0.21807(9,-4,8)(1,-1,-1)否-0.4180-0.2130-0.1970 3.1416 1.1614-0.41808(11,-6,8)(1,-1,-1)否-0.4990-0.67600.4311 3.1416 1.3260-0.4990图6㊀关节转角随时间的变化曲线Figure 6㊀Joint angle curve changing withtime 图7㊀机械臂运动仿真过程Figure 7㊀Simulation process of manipulater motion械臂运动要求且避开碰撞的最优路径㊂6㊀结论本文以ABB1410型号的六自由度空间机械臂为研究对象,首先对其进行运动学分析,建立D-H 运动模型,推导正㊁逆运动学变换公式,得到从空间坐标到关节转角的转换关系㊂然后设计机械臂与障碍物碰撞检测算法,抽象化三维空间模型㊂对蚁群算法进行改进,使用改进后的蚁群算法完成了机械臂在工作空间的路径规划㊂仿真结果验证了该方法的可行性,为空间六自由度机械臂提供了快速㊁精确的路径规划方法㊂参考文献:[1]㊀马超.6R 串联机械臂复杂空间环境路径规划研究[D].济南:济南大学,2017.MA C.Research on path planning in complex space environment based on 6R serial manipulator[D].Jinan:University of Jinan,2017.[2]㊀王兆光.六自由度机械臂避障路径规划研究[D].成都:西南交通大学,2018.WANG Z G.Research on obstacle avoidance path planning for 6-DOF manipultor [D].Chengdu:Southwest Jiaotong Universi-521621郑州大学学报(理学版)第52卷ty,2018.[3]㊀刘领化.三维空间机械臂路径规划及减振运动控制[D].株洲:湖南工业大学,2013.LIU L H.Path planning and motion control of vibration reduction of three-dimensional space manipulator[D].Zhuzhou:Hunan University of Technology,2013.[4]㊀唐彪,何波.改进人工势场法的机械臂避障路径规划研究[J].无线互联科技,2017(3):115-117.TANG B,HE B.Research on obstacle avoidance path planning of manipulator with improved artificial potential field method [J].Wireless internet technology,2017(3):115-117.[5]㊀FIORINI P,SHILLER Z.Motion planning in dynamic environments using the relative velocity paradigm[C]ʊIEEE Internation-al Conference on Robotics and Automation.Atlanta,1993:560-567.[6]㊀宗成星,陆亮,雷新宇,等.一种基于A∗算法的空间多自由度机械臂路径规划方法[J].合肥工业大学学报(自然科学版),2017,40(2):164-168.ZONG C X,LU L,LEI X Y,et al.A path planning approach for multi-DOF spatial manipulator via A∗algorithm[J].Journal of Hefei university of technology(natural science),2017,40(2):164-168.[7]㊀HARTENBERG R S.A kinematic notation for lower-pair mechanism based on matrices[J].J Appl Mech,1955,22:215-221.[8]㊀肖俊明,韩伟,王瑷珲,等.六自由度机械臂运动学分析与仿真研究[J].中原工学院学报,2018,29(4):77-83.XIAO J M,HAN W,WANG A H,et al.Simulation study and analysis of six degrees of freedom manipulator kinematics[J].Journal of Zhongyuan university of technology,2018,29(4):77-83.[9]㊀侯欣蕾,于莲芝.基于改进蚁群算法的移动机器人路径规划[J].软件导刊,2017,16(12):162-164.HOU X L,YU L Z.Mobile robot path planning based on improved ant colony algorithm[J].Software guide,2017,16(12): 162-164.[10]王书勤,黄茜.蚁群算法参数优化设置研究[J].信阳师范学院学报(自然科学版),2012,25(2):262-265.WANG S Q,HUANG Q.Studies on the parameters configuration for ant colony algorithm[J].Journal of Xinyang normal uni-versity(natural science edition),2012,25(2):262-265.[11]魏星,李燕.蚁群算法中参数优化及其仿真研究[J].制造业自动化,2015,37(5):33-35.WEI X,LI Y.Research on parameters optimization and simulation of the ant colony algorithm[J].Manufacturing automation, 2015,37(5):33-35.Six-degree-of-freedom Manipulator Path Planning Based onImproved Ant Colony AlgorithmZHAO Huadong,LEI Chaofan,JIANG Nan(School of Mechanical Engineering,Zhengzhou University,Zhengzhou450001,China) Abstract:Aiming to solve the path planning problem of space six-degree-of-freedom manipulator,a path planning method based on improved ant colony algorithm was proposed.The ABB1410industrial manipu-lator was taken as the research target,the D-H motion model of manipulator was built up in order to solve the forward and inverse kinematics equations.The collision detection algorithm was designed,and the improved ant colony algorithm was utilized to plan the path.The motion trajectory at the end of the ma-nipulator was regarded as the set of points that were sequentially routed through the planned path,and the inverse solution of the motion of the manipulator was obtained.Then the corresponding joint rotation angel was got,and the path plan of the space manipulator was realized.The method was effective and feasible to achieve the six-degree-of-freedom manipulator path planning through simulation experiments.Key words:ABB1410manipulator;collision detection;ant colony algorithm;path planning(责任编辑:孔㊀薇)。
一种六自由度机械手奇异回避算法
一种六自由度机械手奇异回避算法崔洪新;李焕良;韩金华;李沛【摘要】针对传统机械手奇异回避算法存在的计算量大、实时性差的问题,提出了基于"奇异分离+指数级阻尼倒数"的奇异回避算法.首先,在对机械手运动学建模分析的基础上,通过Jacobian矩阵计算将导致奇异的参数分离出来;然后,介绍了指数级阻尼倒数算法的原理,并对采用指数级阻尼倒数进行奇异回避导致的误差进行了研究.仿真与实验结果表明,该算法可实现关节角速度在奇异域的平稳光滑过渡,且仅牺牲了机械臂末端在部分方向上的精度,由此算法的有效性和实用性得到验证.%Aiming at the problems of the heavier calculation burden and worse real-time of tradi-tional singularity avoidance algorithms,a novel approach (named "singularity separation plus expo-nential order damped reciprocal"algorithm)was proposed for 6-DOF manipulators.Firstly,the sin-gularity configurations were analyzed and the singularity parameters were separated based on the kine-matics calculation.Then,the principle of exponential order damped reciprocal algorithm was intro-duced and error coefficient caused by the exponential order damped reciprocal algorithm was analyzed. The simulation and experimental results show that the proposed algorithm may achieve smooth transi-tion of joint angular velocities and only part velocities accuracy of the end-effector are sacrificed,the effectiveness and practicability of the proposed algorithm are proved.【期刊名称】《中国机械工程》【年(卷),期】2017(028)011【总页数】8页(P1312-1318,1325)【关键词】六自由度机械手;奇异回避;奇异分离;指数级阻尼倒数【作者】崔洪新;李焕良;韩金华;李沛【作者单位】解放军理工大学野战工程学院,南京,210007;解放军理工大学野战工程学院,南京,210007;解放军理工大学野战工程学院,南京,210007;解放军理工大学野战工程学院,南京,210007【正文语种】中文【中图分类】TP242.2奇异性是关节型机器人的固有特性,当机械臂运动到奇异位形附近时,雅可比矩阵的逆是病态的且趋于无穷大,从而需要无穷大的关节角速度和角加速度,这会导致机械臂在运动过程中出现振动,严重影响机器人的轨迹跟踪精度。
机器人与计算机集成制造--一个六自由度可重构的混合并联机器臂

学院专业姓名学号任课教师机器人与计算机集成制造一个六自由度可重构的混合并联机器臂摘要本文提出了一种被称为ReSI-BOT的可重构的混合并联机器人的案例研究。
为了可持续制造,它解决了可重构6自由度并行机制的领域。
它还具有一个自重构的架构。
一个系统分析包括运动学、常数取向工作区,奇点和刚度,详细开发此系统分析。
为了揭示了所研究架构的一些独特的特点,讨论了有趣的功能。
加权刚度、灵活性和工作空间体积是衡量多目标优化过程的性能指标。
关键词:可重构的并联机器臂;混合机器人;并联运动;设计优化;六自由度1.简介在过去六十多年,机器人已经吸引了许多研究者。
针对不同的应用程序的串行机器人,做出了许多努力。
最近,并联机器人的领域开始显现出它的优势。
并联机构(PMs)优于串行机构许多,有些典型的特点高载荷/重量比、速度、精度、刚度、低惯性。
在研究文献中,有人提出很多参数[1,2]。
在大的平行配置目录中,这些参数可以找到[3,4]。
抛开这一事实,并联机器人的发展一般比一个串联机器人更复杂[3,5],普遍接受的缺点,并联机器人具有较小工作空间和较复杂的运动奇异点 [6]。
为了解决制造业的灵活性的需要,研究了可重构并联机器人系统。
绝大多数的这些提议系统具有较低的流动机制。
这里有几个例外[7,8],没有一个是混合设计。
因此,具有柔性和可重构制造机器人相关的艺术研究状况主要限于三至五自由度的并联机器人。
尽管这是事实,发展到目前为止最成功的、成熟的、通用的并联机器人是斯图尔特平台(SP),此平台本身具有的六自由度[ 9 ]。
我们相信,研究的可重构机器人系统有超过五自由度,混合动力的优势。
本文提出了一种被称为ReSI-BOT的混合并联机器人,它有6个自由度的可重构的机械臂。
在文献[10,11]中,提出了相关的先进机械臂的设计。
一个主要差异是设计的机械臂具有固有的重构性质,过去的研究设计不具有可重构性。
重构的机械臂设计的优点是大的,它允许在混合链的第一个关节是半活动重构。
六自由度机械臂系统设计及其关键技术研究

二、关键技术研究
1、控制系统设计与实现
控制系统是六自由度机械臂的核心,直接决定了机械臂的运动性能。常见的控 制系统有基于PC的控制系统、嵌入式控制系统和实时操作系统等。控制系统需 要设计数学模型,并根据数学模型选择合适的控制算法,如PID控制、模糊控 制和神经网络控制等。
2、数据采集与处理技术
近年来,机器学习技术在六自由度机械臂的应用逐渐增多,通过训练机械臂执 行各种任务,可以实现对机械臂的智能控制。例如,采用深度学习算法训练机 械臂抓取物品的位置和姿态,从而实现自动化抓取和搬运。此外,机器学习还 可以用于机械臂的路径规划和运动优化等方面,提高机械臂的工作效率和运动 性能。
三、实验与结果分析
实验与结果分析验证了所设计的六自由度机械臂系统在某些方面具有优越的性 能表现,同时也揭示了未来研究方向和需其关键技术的有效性,需要进行实验设计 与实施。实验应包括自由度数目的选择、运动区域的设定等内容,并要呈现实 验结果和数据分析。例如,可以通过对比实验,分别测试不同自由度数目的机 械臂在速度、精度和稳定性等方面的性能表现。实验结果应包括运动轨迹的展 示和误差分析等,并对实验结果进行总结。
数据采集与处理技术是提高机械臂运动性能的重要手段。通过采集机械臂各关 节的位置、速度和加速度等信息,经过数据处理和反馈控制,可以实现对机械 臂运动的精确控制。数据采集通常采用编码器、陀螺仪和加速度计等传感器, 数据处理则包括数据滤波、补偿和优化等步骤,以提高数据的准确性和可靠性。
3、基于机器学习的运动规划与 智能控制
根据实验结果,可以分析出本研究的优点和不足之处。例如,实验结果显示采 用六个自由度的机械臂具有较高的运动精度和稳定性,但在某些动作的执行上 可能需要更多的时间。此外,实验结果还可能揭示控制系统设计和数据处理技 术对机械臂性能的影响,为未来研究提供参考和改进方向。
六轴机械臂避碰运动学算法研究的开题报告
六轴机械臂避碰运动学算法研究的开题报告一、研究背景和意义:六轴机械臂广泛应用于工业自动化、医疗卫生、军事等领域,然而在实际应用过程中,机械臂在运动中可能会与其他物体碰撞,导致机械臂的损坏或运动不稳定,甚至对人员或环境造成危害。
因此,如何使机械臂在运动过程中实现自适应避碰,提高机械臂的智能化水平,是当前研究的热点和难点。
本文将针对六轴机械臂进行避碰运动学算法研究,探索一种能够在运动过程中自适应避碰的算法,并实现对机械臂的保护和优化运动控制,提高机械臂的安全性和稳定性,具有重要的实际应用价值和研究意义。
二、研究内容和方法:1. 避碰运动学算法理论研究。
本文将首先从机械臂的运动学角度出发,分析机械臂在运动中可能出现的碰撞情况和避碰原理,建构避碰运动学算法模型;同时,结合机械臂实际应用场景,考虑机械臂在不同情况下的运动轨迹,建立机械臂的避碰模型。
2. 六轴机械臂避碰控制系统设计。
在理论研究的基础上,本文将设计一套基于避碰运动学算法的六轴机械臂避碰控制系统,包括机械臂控制器、传感器等硬件设备,以及实现避碰算法的软件程序。
通过系统的实施和实验验证,检验算法模型的优越性和实际应用价值。
3. 实验验证与数据分析。
本文将通过对设计系统的试验研究,验证算法的准确性和可行性,并从程序运行效率、稳定性、避碰效果等多个角度对算法模型的性能进行评估和比较分析。
三、研究难点和挑战:1. 机械臂的运动特点和复杂性使得算法研究和实现难度较大。
2. 如何实现机械臂在高速运动中的实时避碰,需要针对机械臂的速度、角度和力度等多方面的因素进行精确计算和控制。
3. 实验验证需要考虑多种场景和情景,确保算法模型的可靠性和适应性。
四、研究成果展望:本文将着重研究六轴机械臂避碰算法,在实现机械臂自适应避碰的同时,为机械臂的优化运动控制提供了新思路。
本文预计能够通过研究,构建一套基于避碰运动学算法的六轴机械臂避碰控制系统,并通过实验验证和数据分析,检验算法模型的优越性和实际应用价值。
基于ROS的六自由度机械臂避障研究
基于ROS的六自由度机械臂避障研究袁杰;刘祚时【摘要】针对障碍环境下的机器人运动规划问题,提出了一种基于开源操作系统ROS平台的机械臂避障规划方法.以ABB六自由度工业机器人作为对象,进行运动学分析,利用SolidWorks软件导出URDF文件,在ROS平台下,通过MoveIt!配置包完成机械臂运动规划配置.选择随机采样算法(RRT)在MotionPlanning插件中进行机械臂的避障仿真,导出各个关节数据,并使用MATLAB进行二次分析.利用ROS 在复杂环境下进行机器人的仿真分析,相比其他系统更加的方便直观,对机器人的应用研究意义重大.【期刊名称】《制造业自动化》【年(卷),期】2017(039)012【总页数】4页(P41-43,80)【关键词】机械臂;运动规划;避障规划;RRT;机器人仿真【作者】袁杰;刘祚时【作者单位】江西理工大学机电工程学院,赣州 341000;江西理工大学机电工程学院,赣州 341000【正文语种】中文【中图分类】TH1660 引言机器人的运动规划一直是机器人研究的重点,目前工业上使用的机器人大多数为工人点对点示教实现的,人为来示教即费时又费力。
要想机器人能够生成一条无碰撞的最优轨迹,必须解决机器人避障的难题。
计算机虚拟控制及仿真平台为机器人运动规划的研究提供了方便,SolidWorks、Ansys、MATLAB、Adams等是目前使用较为普遍的软件平台,这些平台各有千秋,但对完成复杂环境下的机器人运动不够方便直接。
MATLAB作为一款数学计算软件,能够利用其强大的算法来完成仿真实验,但对3D模型的表现力较差,且很难与外部系统和其他功能需求相结合[1]。
SolidWorks等三维建模软件虽然可以出色的完成机械的建模,但却不能实现算法的验证[2]。
现阶段,大多都使用C、C++、Java等编程语言与Open Inventor或OpenGL想结合编写图形仿真系统,但是操作起来比较复杂,其仿真系统也主要是观察系统的运动过程,数据参数不具有参考性[1]。
搬运机器人六自由度液压机械臂研究

搬运机器人六自由度液压机械臂研究目录一、内容概要 (2)1.1 研究背景 (3)1.2 研究意义 (4)1.3 国内外研究现状及发展动态 (5)二、六自由度液压机械臂的理论基础 (6)2.1 液压传动原理 (8)2.2 机器人运动学与动力学基础 (9)2.3 六自由度机械臂的配置与设计要求 (10)三、六自由度液压机械臂的建模与分析 (11)3.1 结构设计与选型 (13)3.2 运动学模型建立 (14)3.3 动力学模型建立 (15)3.4 系统性能分析与优化 (16)四、液压驱动系统设计 (17)4.1 液压泵的选择与设计 (18)4.2 液压缸的设计与选型 (19)4.3 控制阀的选择与设计 (20)4.4 液压系统的控制策略与实现 (22)五、六自由度液压机械臂的仿真研究 (23)5.1 仿真模型的建立 (24)5.2 关键参数的仿真分析 (26)5.3 控制策略的仿真验证 (27)5.4 仿真结果与分析 (28)六、实验研究 (29)6.1 实验设备与方案设计 (30)6.2 实验过程与数据采集 (31)6.3 实验结果与分析 (32)6.4 实验总结与讨论 (34)七、结论与展望 (35)7.1 研究成果总结 (36)7.2 存在问题与不足 (37)7.3 后续研究方向与展望 (38)一、内容概要本研究旨在深入探讨搬运机器人六自由度液压机械臂的运动学、动力学特性及其性能优化。
通过建立精确的数学模型,结合先进的控制算法和仿真技术,我们实现了对机械臂运动过程的精确控制和高效作业。
研究重点涵盖了机械臂的结构设计、驱动机制、感知系统以及控制策略等多个方面。
在结构设计上,我们采用了模块化的设计思路,使得机械臂的维修和部件更换变得更加便捷。
通过采用高性能的液压元件,确保了机械臂在承受较大负载时仍能保持稳定的运动性能。
在驱动机制方面,我们创新性地提出了基于液压驱动的六自由度机械臂方案。
该方案不仅具有较高的能量转换效率,而且能够实现各关节的独立控制,从而提高了机械臂的灵活性和工作效率。
一种新的六自由度机械臂运动学反解方法研究_王俊龙张国良敬斌徐君
过程,计算量较大,难度较高。常见的反解 问题进行求解。
方法有解析法、几何法、迭代法[3,4]等。在
为了解决上述问题,本文采用能量优化
求解机械臂运动学逆解问题中,迭代法受到 的遗传算法对问题进行分析、解决。在对机
初始值选取的约束,只能求得一组解;解析 械臂进行运动学分析的基础上,采用遗传算
法计算较为复杂,但可以得到全部根;几何 法将各个关节的角度进行编码,以能量最优
3 个连续关节轴交与一点的 6R 机械臂逆运 动学可解[5];Duffy 证明了 3 个连续关节轴
学问题的标准方法,主要包括运动学正解和 平行的 6R 机械臂逆运动学可解[6],称这两
反解两个部分。其中反解部分是通过已知机 种结构的机械臂为构型机械臂,本文研究的
械臂末端位姿,求解机械臂各个关节角度的 机械臂不具有这种结构,无法通过解析法对
摘要:针对运用解析法对机械臂进行运动学反解仅适用于具有特定结构机械臂的不足,提出能量优化的遗
传算法进行机械臂运动学反解的方法。为便于能量的量化计算,在进行机械臂运动学分析的基础上,建立
四连杆简化模型。采用实数编码方式,以机械臂各关节角上下限为依据,建立与之相对应的染色体。以机
械臂各连杆势能变化及机械臂末端与期望值之差作为适应度函数,评估个体的适应度。通过概率的方法实
索算法。使用遗传算法,首先应当找到合理的 适应度函数。由于机械臂多采用电池供电,
从实际出发,采用能量消耗作为适应度函
数。在实际的应用中,由于各个关节之间的
连接方式不同,各关节转动相同的角度所消
耗的能量不同。
运用遗传算法进行机械臂的反解,首先
必须保证所求得的关节角度值能够使机械
臂末端达到期望的位置,在此前提下,使机
六自由度机械臂轨迹规划及优化研究
六自由度机械臂轨迹规划及优化研究一、本文概述理论基础与问题阐述:本文将系统梳理六自由度机械臂的数学模型,包括其笛卡尔坐标系下的运动学逆解与正解、动力学建模,以及关节空间与操作空间之间的转换关系。
在此基础上,明确阐述轨迹规划与优化所面临的关键问题,如奇异位形规避、关节速度与加速度限制、路径平滑性要求、动态负载变化等因素对规划算法设计的影响。
轨迹规划方法:针对上述问题,我们将探讨和比较多种有效的轨迹规划策略。
这包括基于插值的连续路径生成方法(如样条曲线、Bzier曲线),基于优化的全局路径规划算法(如RRT、PRM等),以及考虑机械臂动力学特性的模型预测控制(MPC)方法。
对于每种方法,将详细分析其原理、优势、适用场景及可能存在的局限性,并通过实例演示其在典型任务中的应用效果。
轨迹优化技术:在基本轨迹规划的基础上,本文将进一步探究如何运用先进的优化算法对初始规划结果进行精细化调整,以达到性能最优。
这包括使用二次规划、非线性优化、遗传算法等手段对轨迹的关节角序列、时间参数化、能量消耗等指标进行优化。
还将讨论如何引入避障约束、柔顺控制策略以及自适应调整机制,以增强机械臂在复杂环境和不确定条件下的适应性和鲁棒性。
实验验证与性能评估:本文将通过仿真研究与实际硬件平台上的试验,对所提出的轨迹规划与优化方案进行详细的验证与性能评估。
实验设计将涵盖多种典型应用场景,考察规划算法的计算效率、轨迹跟踪精度、能耗表现以及对意外扰动的响应能力。
实验结果将以定量数据与可视化方式呈现,以便于对比分析和理论验证。
本文致力于构建一套全面且实用的六自由度机械臂轨迹规划与优化框架,为相关领域的研究者和工程技术人员提供理论指导与实践参考,推动六自由度机械臂技术在实际应用中的效能提升与技术创新。
二、六自由度机械臂系统建模在六自由度机械臂的研究与应用中,系统建模是一个关键环节。
本节将重点讨论六自由度机械臂的数学建模,包括其运动学模型和动力学模型。
基于RRT搜索算法的六自由度机械臂避障路径规划
基于RRT搜索算法的六自由度机械臂避障路径规划代彦辉;梁艳阳;谢钢【期刊名称】《自动化技术与应用》【年(卷),期】2012(031)010【摘要】针对三维空间下的机器人路径规划问题,提出了一种改进的快速随机树算法.该算法以机器人的出发点作为随机树的根节点,以基准向量为基准选择节点的扩展方向,逐渐增加叶子节点,降低了节点的随机性,提高了扩展速度.通过运动学反解快速规划出一条全局优化路径,对于反解失败的点,做了规划替代,保证了路径规划的平滑性,降低了机器人工作过程中的抖动,从而得到能够抵达目标位姿的安全路径.%A new improved rapid-exploring random tree algorithm for path planning of robot is proposed to plan an optimal path in complex environment .The starting point as root node of the random tree, and the standard vector as benchmark to choose direction,by extending, gradually increase the leaf nodes. The algorithm Improve the speed of expansion.Through the inverse kinematics rapid planning out a global optimization path, to solve the point of failure , instead of a reasonable method, makes the path smoothness, ensures mechanical arm steady at work, and finds a security path to reach target pose.【总页数】7页(P31-37)【作者】代彦辉;梁艳阳;谢钢【作者单位】西南科技大学,信息工程学院,四川绵阳621010;西南科技大学,信息工程学院,四川绵阳621010;西南科技大学,信息工程学院,四川绵阳621010【正文语种】中文【中图分类】TP241.2【相关文献】1.基于改进RRT算法的串联机械臂避障空间路径规划 [J], Yi CAO;Meng-shi GUO;Hai-zhou LIU2.基于脊线模态法和RRT算法的蛇形机械臂避障控制研究 [J], 王轸;常健;李斌;王聪;刘春;张良全3.基于改进RRT-Connect算法的焊接机器人避障路径规划 [J], 孙灵硕4.基于RRT*算法的六自由度机械臂避障路径规划 [J], 尹斌;卢文涛;魏文卿5.基于导航势函数法的六自由度机械臂避障路径规划 [J], 汪首坤;朱磊;王军政因版权原因,仅展示原文概要,查看原文内容请购买。
一种六自由度机械臂避障算法研究
男(汉族),湖南张家界人,空军工程大学导弹学院副教授,主要
从事计算机仿真与人工智能研究。郭桂治(1982- ),男(汉族),
河北沧州人,空军工程大学导弹学院硕士生,主要研究方向为
体系对抗与军事运筹。
Biography: ZHANG Zhi -bin (1984 - ), male (Han nationality),
(18):111~113. [3]齐欢,王小平.系统建模与仿真.北京:清华大学出版社,2004.
术
[4]姜启源,谢金星.数模模型.北京:高等教育出版社,2003. [5]胡永孚.数学模型.西安:西北工业大学,1997.
创
新 作者简介:张志斌(1984- ),男(汉方向为计算机仿真。石志寒(1965- ),
机器人技术 文 章 编 号 :1008-0570(2008)10-2-0230-02
中 文 核 心 期 刊 《 微 计 算 机 信 息》 ( 嵌 入 式 与 S OC )2008 年 第 24 卷 第 10-2 期
一种六自由度机械臂避障算法研究
Obstacle Avoiding Research on the Machine Arm of Robot Having Six Freedom
本文作者创新点: 本文分别从机器人的连杆避障和关节点
避障出发建立模型,运用外接球包含障碍物的方法很好地解决
了机械臂避碰问题,并给出了具体的实现算法。
参考文献
[1]刘喜昂,周志宇.移动机器人的超声模糊避障算法.微计算机信
息.2004,20(1):31~32.
技
[2]刘彦忠.机械手自适应模糊控制器设计.微计算机信息.2005
轨迹点。
结束语
图3
范围示意图
六轴机械臂避碰运动学算法研究汇编
路侧检修活动的机械臂,有6个关节(轴),6轴联动,形成三维运动轨迹。
1.2六轴机械臂位置逆解问题的研究现状
位置逆解问题是机械臂机构学乃至机械臂学中的最基础也是最重要的 研究问题之一“~,它直接关系到机械臂运动分析、离线编程、轨迹规划和实 时控制等工作”。因为速度和加速度分析都要在进行位置分析的基础之上才能 进行,所以位置逆解问题是机械臂运动规划和轨迹规划的基础,只有通过运 动学逆解把空间位姿转换为关节变量,才能实现对机械臂末端执行器的控制。 而从工程应用的角度出发,位置逆解阀题的研究成果可以很容易地应用到机 械臂上面去,往往更引起我的兴趣,因此就更加促进了对位置逆解问题的研 究。
soRware platform for manipulator control,and have been applied in the real control
ofthe manipulatior.Through the experiment ofreal control,the method mentioned
蒸汽发生器是一种热交换器,其蒸发段主要由数千根倒置的U形传热管 组成。一回路水在传热管内流动,二回路给水的加热和蒸发在传热管外侧进 行。u形管在管板孔内全胀,并与一回路侧管板表面相焊接。一回路水侧封 头是一个半球形封头(下封头),与管板相焊接,并由一块隔板分隔为两个水 室,每个水室有一个与反应堆冷却剂系统相连接的接管和一个用于进入检修 的人孔。
manipulator in the installation period is analyzed,which gives a method based on algebraic method is brought forward according to the special structure of the manipulator,with which we Call solve the problem accurately and rapidly.The nonmonotonic trust region aigorithm is used for the optimal question solution,this approach has not only the rapid convergence for Newton's method,but also the desirable overall convergence.make the course of solution nlo鹏convenient and
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文作者创新点: 本文分别从机器人的连杆避障和关节点
避障出发建立模型,运用外接球包含障碍物的方法很好地解决
了机械臂避碰问题,并给出了具体的实现算法。
参考文献
[1]刘喜昂,周志宇.移动机器人的超声模糊避障算法.微计算机信
息.2004,20(1):31~32.
技
[2]刘彦忠.机械手自适应模糊控制器设计.微计算机信息.2005
机器人技术 文 章 编 号 :1008-0570(2008)10-2-0230-02
中 文 核 心 期 刊 《 微 计 算 机 信 息》 ( 嵌 入 式 与 S OC )2008 年 第 24 卷 第 10-2 期
一种六自由度机械臂避障算法研究
Obstacle Avoiding Research on the Machine Arm of Robot Having Six Freedom
Key words: Freedom; Obstacle Avoiding; Dynamic Programming
技
术
引言
自 1959 年美国的英格伯格和德沃尔制造出世界上第一台
创 工业机器人“尤尼梅特”开始,近半个世纪以来,机器人的研制
和应用以惊人的速度发展并取得长足的进步。当今世界,机器
新 人的应用领域已十分广泛,包括工业生产、海空探索、医疗康复
(收稿日期:2008.08.23)(修稿日期:2008.10.05)
《 P LC 技术应用 200 例》
邮局订阅号:82-946 360 元 / 年 - 231 -
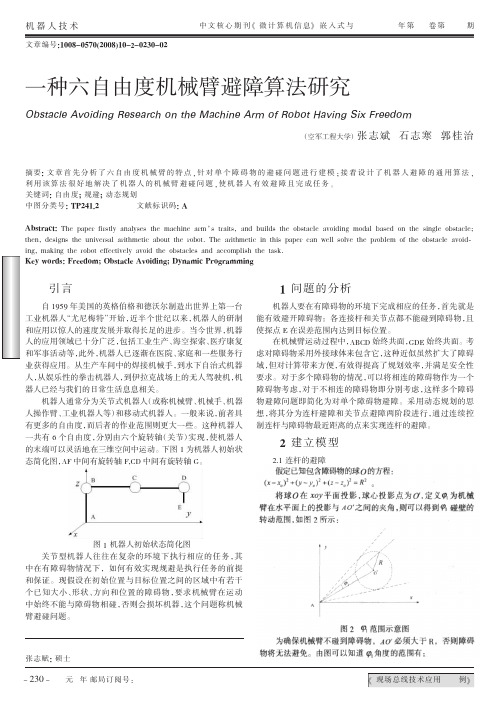
2 建立模型
2.1 连杆的避障 假定已知包含障碍物的球 的方程:
。 将球 在 平面投影,球心投影点为 ,定义 臂在水平面上的投影与 之间的夹角,则可以得到 转动范围,如图 2 所示:
为机械 碰壁的
图 1 机器人初始状态简化图 关 节 型 机 器 人 往 往 在 复 杂 的 环 境 下 执 行 相 应 的 任 务 ,其 中在有障碍物情况下,如何有效实现规避是执行任务的前提 和保证。现假设在初始位置与目标位置之间的区域中有若干 个已知大小、形状、方向和位置的障碍物,要求机械臂在运动 中始终不能与障碍物相碰,否则会损坏机器,这个问题称机械 臂避碰问题。
(18):111~113. [3]齐欢,王小平.系统建模与仿真.北京:清华大学出版社,2004.
术
[4]姜启源,谢金星.数模模型.北京:高等教育出版社,2003. [5]胡永孚.数学模型.西安:西北工业大学,1997.
创
新 作者简介:张志斌(1984- ),男(汉族),山西朔州人,空军工程大
学导弹学院硕士生,研究方向为计算机仿真。石志寒(1965- ),
then, designs the universal arithmetic about the robot. The arithmetic in this paper can well solve the problem of the obstacle avoid-
ing, making the robot effectively avoid the obstacles and accomplish the task.
轨迹点。
结束语
图3
范围示意图
为由 到 的距离, 为由 到 的距离, 为由
到 的距离。这样得到 和 的距离公式为:
和
的距离公式为:
(2)
同理,可求得
(3)
当
时, 取到最小值:
同样,当
且
时, 取到最小值:
当
,且
时,可得到 的最小值:
当
或
时, 取到最小值
(4) (5) (6) (7)
(8)
2.2 关节点避障
step10: 如果
,则关节点 不会碰障碍物,转 step12;
step11: 杆碰到障碍物,则判断,如果此时
,则
本文在建立模型过程中,提出了用外接球包含障碍物的研究
方法,很好的解决了机器人的机械臂避碰问题。虽然在一定程度上
扩大了障碍物的区域,但通过算法的实现发现该方法确实为一种
行之有效的方法,为机械臂避碰的研究提供了一种新思路。
利用该算法很好地解决了机器人的机械臂避碰问题,使机器人有效避障且完成任务。
关键词: 自由度; 规避; 动态规划
中图分类号: TP241.2
文献标识码: A
Abstract: The paper firstly analyses the machine arm ’s traits, and builds the obstacle avoiding modal based on the single obstacle;
(713800 陕西三原 空军工程大学导弹学院)张志斌 石志寒 郭桂治
(The Missile Institute,Air Force Engineering University,
Sanyuan 713800,China) ZHANG Zhi -bin SHI Zhi -han
GUO Gui-zhi
,若
满足则转 step4,否则继续循环;
step4:循环 ,计算 , ;
step5: 如果
,则 杆不会碰到障碍物,转 step8;
step6: 如果
,则关节点 C 不会碰障碍物,转 step8;
step7: 杆碰到障碍物,则设定
或者
;
step8: 循环 和 ,计算 ;
step9: 如果
,则 杆不会碰到障碍物,转 step12;
通 讯 地 址:(713800 陕 西 三 原 空 军 工 程 大 学 导 弹 学 院 研 究 生 一
队)张志斌
(收稿日期:2008.08.23)(修稿日期:2008.10.05)
(上接第 234 页) (School of Mechanical Electronic & Information Engineer, China University of Mining &Technology (Beijing), Beijing, 100083,China)WANG Fu-zhong (School of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo, 454003, China) WANG Fu-zhong ZHANG Li ZHANG Tao 通讯 地 址:(454003 河 南 理 工大 学 新 校 区 电 气 工 程 与 自 动 化 学 院副院长办公室)王福忠
在机械臂运动过程中,ABCD 始终共面,GDE 始终共面。考 虑对障碍物采用外接球体来包含它,这种近似虽然扩大了障碍 域,但对计算带来方便,有效得提高了规划效率,并满足安全性 要求。对于多个障碍物的情况,可以将相连的障碍物作为一个 障碍物考虑,对于不相连的障碍物即分别考虑,这样多个障碍 物避障问题即简化为对单个障碍物避障。采用动态规划的思 想,将其分为连杆避障和关节点避障两阶段进行,通过连续控 制连杆与障碍物最近距离的点来实现连杆的避障。
当 和 不能满足上述关系,即
或
或
时,
就发生了关节点需要规避的情况,如果发生了这种情况。令 、
和 分别表示
与球表面的距离,则应有下述不等式
成立:
(9)
3 算法设计
基于以上分析,我们得到如下避碰算法:
step1: 输入目标点与初始点位置;
step2: 设定 , , , 的初始值;
step3: 循环 ,判断是否满足
设环 ,计算 ;
step13: 如果
,则 杆不会碰到障碍物,转 step16;
step14: 如果
,则关节点 不会碰障碍物,转 step16;
step15: 杆碰到障碍物,则判断,如果此时
,则设
定
,如果此时
,则设定
;
step16: Stop. 输出机械臂避开障碍物到达目标点的一系列
有更多的自由度,而后者的作业范围则更大一些。这种机器人
一共有 6 个自由度,分别由六个旋转轴(关节)实现,使机器人
的末端可以灵活地在三维空间中运动。下图 1 为机器人初始状
态简化图,AF 中间有旋转轴 F,CD 中间有旋转轴 G。
1 问题的分析
机器人要在有障碍物的环境下完成相应的任务,首先就是 能有效避开障碍物:各连接杆和关节点都不能碰到障碍物,且 使探点 E 在误差范围内达到目标位置。
和军事活动等,此外,机器人已逐渐在医院、家庭和一些服务行
业获得应用。从生产车间中的焊接机械手,到水下自治式机器
人,从娱乐性的拳击机器人,到伊拉克战场上的无人驾驶机,机
器人已经与我们的日常生活息息相关。
机器人通常分为关节式机器人(或称机械臂、机械手、机器
人操作臂、工业机器人等)和移动式机器人。一般来说,前者具
张志赋: 硕士
图 2 范围示意图 为确保机械臂不碰到障碍物, 必须大于 R,否则障碍 物将无法避免。由图可以知道 角度的范围有:
- 230 - 360元 / 年 邮局订阅号:82-946
《 现场总线技术应用 200 例》
您的论文得到两院院士关注
机器人技术
再将球 向
(1) 平面投影,球心投影为 ,得到图 3 所示:
(空军工程大学)张 志 斌 石 志 寒 郭 桂 治
ZHANG Zhi-bin S HI Zhi-han GUO Gui-zhi
摘要: 文章 首 先 分 析 了 六 自 由 度 机 械 臂 的 特 点 ,针 对 单 个 障 碍 物 的 避 碰 问 题 进 行 建 模 ;接 着 设 计 了 机 器 人 避 障 的 通 用 算 法 ,
born in Shouzhou, Sanxi. Master candidate of the Missile Insti-