六自由度机器人关节间隙误差分析及仿真
工业机器人机构误差分析

1.制造引起的位置误差
分析表中的各项数据, 发现������������−1 、 ������������ 、 ∝������−1 都为确定的数据。 但是, 制造和安装过程中必定会出现一定的制造误差和安装偏差。 所以需要 分析这些偏差带来的影响。显然,这些都属于制造误差。我们首先计 算出总的变换矩阵 A(程序中为 Tx) ,可从 A 中提取 px, py, pz。 然后根据误差的合成公式: (式 3-1)
式 2-2
总的变换矩阵可以表示为各变换矩阵的乘积:
式(2-3) 式(2-3)中蓝色框中的向量表示机器人手部的姿态,红色框 中的向量表示机器人手部的位置。 具体分析图 1 中的机器人,当������1 为 0 时,坐标系{0}与坐标系{1} 重合,同时,这台机器的关节轴 4、5、6 相互垂直。通过建立这样的 坐标模型可以得出������������ 、 ∝������ 、������������ 、 ������������ 的值。其值如表 2-1 所示。
三、 工业机器人的位置误差
在总的变换矩阵中,机器人手部位置由式(2-3)中的向量[px, py, pz] 表示。而 px, py, pz 均是包括������������ 、 ∝������ 、������������ 、 ������������ (1≤i≤6)等自变量的 函数。向量[px, py, pz]的全微分即为工业机器人的位置误差。而������������−1 、 ������������ 、 ∝������−1 三类参数为确定值, 其引起的误差为机器人的制造误差; ������������ 为 机器人的运动参数,其引起的误差为机器人的运动误差。
程序运行后,得到简化的结果如下: ∆PX=∆������ + ∆������ *(cos(θ5)*(sin(θ1)*sin(θ4) cos(θ4)*(cos(θ1)*sin(θ2)*sin(θ3) - cos(θ1)*cos(θ2)*cos(θ3))) sin(θ5)*(cos(θ1)*cos(θ2)*sin(θ3) + cos(θ1)*cos(θ3)*sin(θ2))) ∆d*(sin(θ5)*(sin(θ1)*sin(θ4) - cos(θ4)*(cos(θ1)*sin(θ2)*sin(θ3) cos(θ1)*cos(θ2)*cos(θ3))) + cos(θ5)*(cos(θ1)*cos(θ2)*sin(θ3) + cos(θ1)*cos(θ3)*sin(θ2))) - ∆a*(cos(θ1)*sin(θ2)*sin(θ3) cos(θ1)*cos(θ2)*cos(θ3)) - ∆d*(cos(θ1)*cos(θ2)*sin(θ3) + cos(θ1)*cos(θ3)*sin(θ2)) - ∆α*(a4*(cos(θ2)*sin(θ1)*sin(θ3) + cos(θ3)*sin(θ1)*sin(θ2)) - d4*(sin(θ1)*sin(θ2)*sin(θ3) cos(θ2)*cos(θ3)*sin(θ1)) + a3*sin(θ1)*sin(θ2)) + ∆a*cos(θ1) 2*∆d*sin(θ1) - ∆α*(d4*cos(θ3)*sin(theta1) - d3*cos(theta1)*sin(θ2) + a4*sin(theta1)*sin(θ3)) + ∆a*(sin(theta1)*sin(θ4) cos(θ4)*(cos(theta1)*sin(θ2)*sin(θ3) - cos(theta1)*cos(θ2)*cos(θ3))) ∆d*(cos(θ4)*sin(theta1) + sin(θ4)*(cos(θ1)*sin(θ2)*sin(θ3) cos(θ1)*cos(θ2)*cos(θ3))) - d4*∆α*sin(θ1) + ∆a*cos(θ1)*cos(θ2)
基于MATLAB的六自由度工业机器人运动分析和仿真
基于MATLAB的六⾃由度⼯业机器⼈运动分析和仿真基于MATLAB 的六⾃由度⼯业机器⼈运动分析及仿真摘要:以FANUC ARC mate100⼯业机器⼈为研究对象,对其机构和连杆参数进⾏分析,采⽤D-H 法对机器⼈进⾏正运动学和逆运动学分析,建⽴运动学⽅程。
在MATLAB 环境下,运⽤机器⼈⼯具箱进⾏建模仿真,仿真结果证明了所建⽴的运动学正、逆解模型的合理性和正确性。
关键词:FANUC ARC mate100⼯业机器⼈; 运动学; MATLAB 建模仿真 1引⾔⼯业机器⼈技术是在控制⼯程、⼈⼯智能、计算机科学和机构学等多种学科的基础上发展起来的⼀种综合性技术。
经过多年的发展,该项技术已经取得了实质性的进步[1]。
⼯业机器⼈的发展⽔平随着科技的进步和⼯业⾃动化的需求有了很⼤的提⾼,同时⼯业机器⼈技术也得到了进⼀步的完善。
⼯业机器⼈的运动学分析主要是通过⼯业机器⼈各个连杆和机构参数,以确定末端执⾏器的位姿。
⼯业机器⼈的运动学分析包括正运动学分析和逆运动学分析。
随着对焊接件要求的提⾼,弧焊等机器⼈的需求越来越多。
本⽂就以FANUC ARC mate100机器⼈为研究对象,通过分析机构和连杆参数,运⽤D-H 参数法建⽴坐标系,求出连杆之间的位姿矩阵,建⽴⼯业机器⼈运动学⽅程。
并在MATLAB 环境下,利⽤RoboticsToolbox 进⾏建模仿真。
2 FANUC ARC mate100 D-H 坐标系的建⽴mate100是FANUC 公司⽣产的6⾃由度⼯业机器⼈,包括底座、机⾝、臂、⼿腕和末端执⾏器,每个⾃由度对应⼀个旋转关节,如图1所⽰。
图1FANUC ARC mate 100机器⼈三维模型DENAVIT 和HARTENBERG 于1955年提出了⼀种为关节链中的每⼀个杆件建⽴坐标系的矩阵⽅法,即D-H 参数法,在机器⼈运动学分析得到了⼴泛运⽤。
采⽤这种⽅法建⽴坐标系:(1) Z i 轴沿关节i +1的轴线⽅向。
六自由度喷涂机器人结构方案设计与位姿误差分析
保密□,在 不保密□。 (请在以上方框内打“√” ) 年解密后适用本授权书。
本论文属于
学位论文作者签名: 日期: 年 月 日
指导教师签名: 日期: 年 月 日
摘
要
喷涂机器人在现代喷涂行业发挥着越来越重要的作用,应用越来越广泛,本文根据 项目实际要求,以六自由度喷涂机器人为研究对象,对其关键结构、运动学及末端位姿 误差进行了分析和研究。主要完成了以下几个方面的工作: (1)根据喷涂机器人的工作对象、工作任务及性能要求,在参考了国外已有成熟 机器人的基础上,对机器人的本体结构方案进行了比较和选择,确定了主要技术参数。 (2)对传动方案进行了设计,对机器人手腕的结构和工作原理进行了分析,对一 些关键结构进行了设计探讨,确定了大、小臂的长度,分析了 J1 关节偏置与工作空间 的关系。 (3)基于 D-H 法对喷涂机器人建立了运动学模型并确定了 D-H 参数,对机器人进 行了正运动学分析,对其逆运动学分析方法进行了论述。求出了机器人的雅可比矩阵。 基于简化模型进行了速度反解。 (4)基于改造后的运动学模型建立了末端位姿误差模型,设置了采样函数对机器 人的位姿进行采样,用 MATLAB 软件编程对位姿误差进行了仿真,得出了角度参数误 差是决定末端位姿误差的主要因素这一结论。
六自由度测量机器人误差分析与仿真(精)

西安理工大学硕士学位论文六自由度测量机器人误差分析与仿真姓名:温瑞申请学位级别:硕士专业:机械设计及理论指导教师:郗向儒20080301摘要论文题目:六自由度测量机器人误差分析与仿真学科名称:机械设计及理论作者姓名:温瑞导师姓名:郗向儒教授签名:必:签名:之趁I复盥r摘要如今,机器人的发展相当的迅速,应用范围也在逐渐扩大。
测量机器人用来完成精确度较高的测量工作,动作的准确性和动作重复的位置精确性都要求很高。
随着零部件加工精度的提高,控制部件改进,测量机器人的位置精度和运动精度也会相应提高。
但是如果只依靠这些来提高测量机器人的各方面的精度,提高的速度会受到许多因素的制约。
因此,在现有技术水平的基础上,尽可能提高机器人的各方面精度,以满足要求,是应重点考虑急需解决的问题。
本文的研究对象是将串联机构学为基础的机器人技术与测量技术相结合的六自由度测量机器人。
对其进行运动分析、误差分析及仿真。
首先,从六自由度测量机器人的结构出发,建立关节坐标系并采用D_H模型分析,从而得到机器人各关节坐标变换矩阵,以此来完成运动学正问题、逆问题的研究,这为以后的误差分析打下了基础。
其次,分析由静态误差引起的机器人末端位姿误差的来源,然后通过机器人位姿广义坐标的描述,建立机器人的静态位姿误差分析模型及其计算表达式,最后根据机器人各关节参数数据及关节运动规律进行了计算,得到机器人位姿广义坐标误差图。
再次,分析引起机器人位姿误差各种因素的来源、影响,将各种因素统一归结为机器人的结构参数误差和运动变量误差,然后利用微分法对各种因素引起的机器人位姿误差进行了公式推导,把机器人各杆件及关节数据代入推导出的公式中进行计算,通过计算表明,应用该方法可以综合分析各种因素对机器人末端位姿的影响。
最后,利用solidworks对该测量机器人进行了实体建模,把该模型导入adams软件中,最终在adams软件中实现了仿真。
关键词:六自由度测量机器人,运动分析,误差分析,仿真SUBJECT:ResearchonErrorSourcesAnalysisandDynamicSimulationof6-DOFMeasurementRobotSPECIALITY:MechanicalDesignandTheoryCANDIDATE:WenRuiINSTRUCTOR:prof.XiangRuXiABSTRACTSlGNATURE:SIGNATURE:ofit'sapplicationalsoisgraduallyT0day,robottechnologydevelopedrapidly,therangeexpanding.Measurementtheaccuracvrobotsarcgenerallyusedtocompletehighprecisionmeasurement,ofac舡onsandmovementstorepeatthepositionrequireshighofaccuracy.Withcomponents,improvementmachiningprecisioncomponentsandimprovedcontrolmeasurememaccuracyandthelocationofrobotmotionaccuracywillbeincreasedaccordingly.Butifonlyrelyonthesetoimprovethevariousaspectsofthemeasurementaccuracy,lncre勰eiIlspeedwillberestrictedbylevelofmanyfactorsSOastoquiteslow.Therefore,basedonexistingtechnology,asmuchaspossibleimprovingaccuracyinallaspectsofrobotsmordertoshouldfocusonmeettheTherequirements,weobjecturgentproblem-ofthispaperisthe6-DOFmeasurementrobotwhichcombines‘"theT觚d锄.bausediIlstitutionsofrobottechnology'’and‘'theMeasurementTechnique'’.Exerciseitsmotionanalysis,erroranalysisandsimulation.Firstly,throughthestructureof6一DOFmeasurementrobot,foundingjointscoordinateandanalyzedrobotbyD.Hmodeltogetthecoordinateresearchofinversetransformationmatrixoftherobotjoints,andcompletethea'rorproblemofkinematics.Thissteplaidthefoundationforanalysis.Seeondlv’analyzethestaticerrorcausedbytheendoftherobotposeerror,thenell'Orthroughanalysiscountofdescribedtherobotposegeneralizedcoordinate,establishtherobotstaticposethemodeIalongwithcalculateexpression.Intheend,calculationiscarriedthroughbycoordinaterobotjointsparameterandjointsmovementroles,gettheposegeneralizedofrobot.eli'orchatNext,analyzetheoriginandinfectionofvariousfactorswhichinducetherobotposeerror.Att—butedtovarioUSfactorsunifiedstructureforrobotmovementvariables.ThentheparameterelrorandelrordifferentialcoefficientisusedindeduceformulaaboutvariousfactorsisinducingtherobotposeenDr.Afterwardcalculationpolescarriedthroughwhenthedateofrobotandjointsweretakenintodeducedformula.Bycalculating,theresultsshowedthatI西安理工大学硕士学位论文applicationofthismethodcanbecomprehensiveanalysisofvariousfactorsontherobotposeoftheend.Finally,themeasurementrobotsolidmodelingwasCaITythroughbyuseSOLIDWORKS,then,themodelistakenintoADAMS,lastlysimulationwascarriedoutbyuseADAMS.Keywords:6-DOFMeasurementRobot,motionanalysis,erroranalysis,simulationII独创性声明秉承祖国优良道德传统和学校的严谨学风郑重申明:本人所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的成果。
《2024年六自由度机械臂控制系统设计与运动学仿真》范文

《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言随着科技的飞速发展,自动化与机器人技术已广泛应用于各种领域,六自由度机械臂是其中一种重要而常见的自动化工具。
它具备灵活的运动能力与复杂操作功能,能够在高精度的环境中完成一系列作业。
本篇论文旨在介绍六自由度机械臂控制系统的设计与运动学仿真,旨在提升机械臂的性能和可靠性。
二、六自由度机械臂控制系统设计1. 硬件设计六自由度机械臂控制系统主要由机械臂主体、驱动器、传感器和控制单元等部分组成。
其中,机械臂主体由多个关节组成,每个关节由一个驱动器驱动。
传感器用于检测机械臂的位置、速度和加速度等信息,控制单元则负责处理这些信息并发出控制指令。
2. 软件设计软件设计部分主要包括控制算法的设计和实现。
我们采用了基于PID(比例-积分-微分)的控制算法,以实现对机械臂的精确控制。
此外,我们还采用了路径规划算法,使机械臂能够按照预定的路径进行运动。
3. 控制系统架构控制系统采用分层架构,分为感知层、决策层和执行层。
感知层通过传感器获取机械臂的状态信息;决策层根据这些信息计算控制指令;执行层则根据控制指令驱动机械臂进行运动。
三、运动学仿真运动学仿真主要用于模拟机械臂的运动过程,验证控制系统的性能。
我们采用了MATLAB/Simulink软件进行仿真。
1. 模型建立首先,我们需要建立机械臂的数学模型。
根据机械臂的结构和运动规律,我们可以建立其运动学方程。
然后,将这些方程导入到MATLAB/Simulink中,建立仿真模型。
2. 仿真过程在仿真过程中,我们设定了不同的工况和任务,如抓取、搬运、装配等。
通过改变控制参数和路径规划算法,观察机械臂的运动过程和性能表现。
我们还对仿真结果进行了分析,以评估控制系统的性能和可靠性。
四、实验结果与分析我们通过实验验证了六自由度机械臂控制系统的性能。
实验结果表明,该系统能够实现对机械臂的精确控制和灵活操作。
在各种工况和任务下,机械臂都能以较高的速度和精度完成任务。
自由度机器人关节间隙误差分析及仿真
自由度机器人关节间隙误差分析及仿真
1 系统介绍
深圳市众为兴数控技术有限公司自主研发设计的MR601机器人,是一
款集工业教学应用于一体的MIN I型6自由度机器人,如该机器人采用基于PC机的开放式控制系统,控制系统如下控制系统软件采用VC6.0开发,具有
点位、空间直线、空间曲线运动功能,可以实现关节坐标编程和空间直角坐标编程,空间直角坐标与关节坐标相互转换。
2 轨迹试验
现让机器人绘制一正方形,以验证机器人整体性能。
机器人末端固定一黑色油性笔,工作平台上放置一白色带灰色条纹瓷砖,见下机器人末端姿态采用ZYZ欧拉角表示,单位为度;坐标单位为毫米,在直
角坐标空间对机器人末端执行器坐标设置如下:
第一点:坐标(350,0,5),姿态(0,180,0);
第二点:坐标(450,0,5),姿态(0,180,0);
第三点:坐标(450,100,5),姿态(0,180,0);
第四点:坐标(350,100,5),姿态(0,180,0);
第五点:坐标(350,0,5),姿态(0,180,0);
其中,第一点与第五点重合以保证绘制出一封闭正方形。
将直角空间坐标转换为关节空间坐标。
机器人根据生成的关节坐标进行正方形绘制。
各点位置以及绘制结果如下结果显示,机器人所绘制轨迹为一平形四边形,存在以下问题:
(1)第1点与实际点偏移2mm;
(2)边12和边34与期望轨迹夹角为2度;。
基于KUKA6自由度机器人的误差分析与仿真_魏厚忠
T=
. 1. T qM q 2
( ) 1 0
— — 式中 : M— n* n 矩阵 。
M=
m1 m1 1 2 熿 m2 m2 1 2
… m1 n 燄 … m2 n … … mn n 燅
mn mn 1 2 燀
设向量 Y 表 示 广 义 力 中 的 除 驱 动 力 以 外 的 广义力 , 则有
第 3 期 魏厚忠 ,等 :基于 KUKA 6 自由度机器人的误差分析与仿真
3 2 9
1 机器人动力学模型的确定
机器人动力学问题 相对机器人 运 动 学 而 言 , 显得异常复杂 。 但同时机器人的动力学研究变得 越来越重要 , 尤其 在 以 高 速 重 载 自 动 设 备 需 求 日 益强烈的今 天 , 动 力 学 问 题 越 发 突 出。动 力 学 分 结构设计与驱动器选型的基础 。 析是机器人控制 、 目前 , 分析机器人 动 力 学 的 常 用 方 法 主 要 有 拉 格 朗日法 、 牛顿 -欧拉法 、 虚功原理法及凯恩方程 等 , 文中将以最为经典的前两种方法为基础建立动力 学模型 。 ) 设一构件 , 质心以加速度 v 1 c 运动 。 引起产 生加速度所需的力 F 由牛顿方程式给出 :
2 运动学模型的确定
一个6轴串联机 建立 6 自由 度 机 器 人 模 型 , 械臂 , 得到机 器 人 连 杆 坐 标 系 , 根 据 D-H 法 得 到 机械臂位姿的变换矩阵如下 :
0
s c o s o o -c 2 3( 1 x+ 1 2 3 z y) r c s i n θ 6 = π-a s i n θ 5 烆 设在连续轨迹的起始点和终点机器人的姿态 , 为( 和( 机器人运动连续平 Ψ0 , θ Ψ1 , θ 0, 0) 1, 1) φ φ
机器人关节控制的运动分析与仿真研究
机器人关节控制的运动分析与仿真研究一、引言机器人是一种多自由度的控制系统,它的运动实现靠机器人的关节控制。
关节控制是实现机器人高效运动的核心技术之一。
本文将针对机器人关节控制的运动分析与仿真研究,进行详细解析。
二、机器人关节控制的运动分析1.机器人关节控制功能机器人的关节控制是实现机器人各种运动的核心技术之一。
机器人的关节控制可以让机器人的各个关节部分进行各种转动,实现不同方向的运动。
在实际应用中,机器人的关节控制需要兼顾速度、力度和精度等多方面因素,以确保机器人的运动能够满足各种需求。
2.机器人关节运动分析机器人的关节运动分析主要包括机器人关节的正反向运动分析、关节坐标系的确定和关节运动规律等方面。
在机器人的关节运动分析过程中,需要考虑机器人整体的运动状态,进而对机器人的关节运动进行分析。
三、机器人关节控制的仿真研究1.机器人关节模型的建立机器人关节模型的建立是机器人关节控制仿真的前提,需要对机器人关节的物理模型进行建立。
机器人关节模型的建立需要考虑机器人关节的各种机构特性,如齿轮传动、电机驱动等等。
2.机器人关节控制仿真通过建立机器人关节模型,可以进行机器人关节控制的仿真研究。
机器人关节控制仿真可以不受时间和空间限制,更加直观地呈现机器人关节运动的过程。
四、机器人关节控制的应用实例1.搬运机器人的关节控制搬运机器人主要是用来处理各种物体的,因此搬运机器人需要具备较高的关节控制精度和速度。
在机器人关节控制方面,搬运机器人需要兼顾力度、速度和精度等多个因素。
通过机器人关节控制的仿真研究,可以优化搬运机器人的关节控制算法,提高机器人的效率和精度。
2.医疗机器人的关节控制医疗机器人主要是应用在手术操作等领域,因此医疗机器人需要高精度、高速度的关节控制。
在医疗机器人的关节控制方面,需要兼顾力度、速度和精度等方面因素。
医疗机器人的关节控制需要经过严格的仿真研究,以保证机器人的运动精度和安全性。
五、结论机器人关节控制的运动分析与仿真研究是实现机器人运动的关键技术之一。
六自由度机械臂位置误差分析

【 关键词 】 六自 由度;机械臂;位置误差分析
表1误差统计结果
。 前言
近 年 来 ,我 国机 器 人 技 术 飞 速 发 展 ,在 多个 领 域 中 ,各 式 各 样 的机 器 人得 到 了广 泛 的应用 。然而 ,跟 其他 工 业化 的 国家 比较 而 言 ,我 国的机 器 人 的研 究相对 比较落 后 。所 以,对机 器 人 的研 究并 对 其进 行 推广 的现 实 意义 是 很大 的 。机器 人 在焊 接 和搬 运 、装配 等 作 业 以及 电子 工业 中有 广 泛 的应 用 ,并在 其 中发 挥 了极 大的 作用 。 六 自由度机 器 人是 机器 人 中 的一个 典 型 ,因此 本 文对 六 自由度机 械 臂 的运 动位 置 误差 进 行 了分析 与 研 究, 以期 达到 节 省能源 、使其 运 动 更加 精确 化 ,并 提升 其工 作效 率 。
( J n船 1 姚 8 5 . ^蚺,
《 船 躺, l 被 j 孙
0 醛
n/ t 4
n 轱
“ 6 6 . ,4 1 . 辄- I 赫 , .
《I。 1 m
“ 电 甚 蠢氛。 I l S, ,
1 六 自由度机械臂的结构模型分析
在 本课 题 中 ,六 自由度 机 械 臂有底 盘 ( 腰 ),大 臂 , 中臂 ,小 臂 ,手 腕旋 转 ,手 腕俯 仰 六个 自由度 ,在 手腕 顶 部则 通过 自主设 计 的手 爪机 构 实现 对 于负载 的抓 取 ,属 于典 型 的6 R 机器 人 。
表2分别改变 ei 的大小 。增减0 . 0 5。引起指尖的偏移情 况
魏黉q 韵太小, 增 减积船 啦 魁 瞻袋瞬謦罄缸m}
△@i 的精度 为0 . 1 ,根 据精 度 的定义 , △ @ i 的误 差是 小于0 . 0 5 。 考虑 在一个 确定 的位姿 下, 只改变其 中一个旋 转轴 的角度 ,让它增 大 或 者减 小一个 不小 于0 . 0 5 的角度 ,观 察最 终 目标 的变化 情况 。 由于在 不 同位姿下 ,丑Hi 的变 化 引起 的指尖 位置 的变 化幅度 是不 同的 ,以例 题 中涉 及的 几个位 姿为 例 ,如表2 所示 。 由表 1 和表2 可 以看 出,算 法 的误 差与机械 臂的精度误 差基本处于 同一数量级 。
六自由度机械臂控制系统设计与运动学仿真
六自由度机械臂控制系统设计与运动学仿真一、本文概述随着机器人技术的快速发展,六自由度机械臂作为一种重要的机器人执行机构,在工业自动化、航空航天、医疗手术等领域得到了广泛应用。
六自由度机械臂控制系统设计与运动学仿真研究对于提高机械臂的运动性能、优化控制策略以及实现高精度操作具有重要意义。
本文旨在深入探讨六自由度机械臂控制系统的设计原理与实现方法,并通过运动学仿真验证控制系统的有效性和可靠性。
本文将首先介绍六自由度机械臂的基本结构和运动学原理,包括机械臂的正运动学和逆运动学分析。
在此基础上,详细阐述六自由度机械臂控制系统的总体设计方案,包括硬件平台的选择、控制算法的设计以及传感器的配置等。
接着,本文将重点介绍控制系统的核心算法,如路径规划、轨迹跟踪、力控制等,并分析这些算法在六自由度机械臂运动控制中的应用。
为了验证控制系统的性能,本文将进行运动学仿真实验。
通过构建六自由度机械臂的运动学模型,模拟机械臂在不同工作环境下的运动过程,并分析控制系统的实时响应、运动精度以及稳定性等指标。
本文将总结六自由度机械臂控制系统设计与运动学仿真的研究成果,并展望未来的研究方向和应用前景。
通过本文的研究,旨在为六自由度机械臂控制系统的设计与优化提供理论支持和实践指导,推动机器人技术在各领域的广泛应用和发展。
二、六自由度机械臂基本理论六自由度机械臂,又称6DOF机械臂,是现代机器人技术中的重要组成部分。
其理论基础涉及机构学、运动学、动力学以及控制理论等多个领域。
六自由度机械臂之所以得名,是因为其末端执行器(如手爪、工具等)可以在三维空间中实现六个方向上的独立运动,包括三个平移运动(沿、Y、Z轴的移动)和三个旋转运动(绕、Y、Z轴的转动)。
机构学基础:六自由度机械臂的机构设计是其功能实现的前提。
通常,它由多个连杆和关节组成,每个关节都有一个或多个自由度。
通过合理设计连杆的长度和关节的配置,可以实现末端执行器在所需空间内的灵活运动。
六自由度机械手动力学仿真
机电工程学院机械动力学课程设计学号:专业:机械工程学生姓名:任课教师:2012年10月基于PRO/E和ADAMS的六自由度机械手运动仿真本文利用PRO/E软件对所设计六自由度机械手进行三维实体建模,然后通过PRO/E 和ADAMS良好的数据接口将模型数据直接导入ADAMS,根据实际设计要求添加相关约束,在此基础上进行运动仿真,研究机械手各机构关节的运动,测量各个关节的关节角位移、速度、加速度和驱动力矩的变化情况,通过观察各机构的运动轨迹以及相关曲线的变化趋势确定设计中存在的问题,对设计阶段的产品进行虚拟性能测试。
1 六自由度机械手的三维实体模型1.1利用Pro/E建立机械手的三维实体模型本文所研究的六自由度机械手由Part2-Part8七部分零件构成,Part_1为大地。
将绘制完成的零件采用从下向上的装配顺序进行装配,其装配效果图如图1所示。
图1 机械手装配模型1.2三维模型的导入首先在Pro/E环境下将机械手装配模型保存为“.x_t”格式,然后在ADAMS中执行[import]导入刚才生成的“.x_t”文件。
导入的模型没有质量,需要自己添加,在ADAMS 中分别定义各零件材料属性为“steel”。
2 ADAMS运动仿真机械手在运动过程中要尽量平滑、平稳,否则会产生机械部件的磨损加剧,并导致机械手的振动和冲击。
因此在仿真过程中测量各个关节的关节角位移、速度、角加速度和驱动力矩的变化情况。
将模型各零部件导入ADAMS软件中后,各个构件之间还没有任何的约束,模型只是提供了各构件的初始位置。
本机械手两两相邻的构件构成的六个关节都是转动关节,均定义为旋转副,底座与大地之间定义为固定副,然后再为每个旋转副分别定义驱动(Motion)。
从下往上,Part_2和Part_3之间为Motion_1,直到Part_7和Part_7之间为Motion_6。
添加完驱动后的模型如图2所示。
图2 ADAMS环境下机械手仿真模型本题为已知各关节转角运动关系,因此使用STEP函数定义各关节驱动为角位移的函数。
基于KUKA6自由度机器人的误差分析与仿真

.
s n ! l6一 兀一 ci !! ±: 0
二
sn s i 0
设在 连续 轨迹 的起 始 点和终 点 机器 人 的姿态
为 ( r,o ) ( , ) 机 器 人 运 动 连 续 平 go0 , 和 0 , ,
滑 , 态 角度 随时 问 做线 性 变 化 。在 时 刻 t( < 姿 t t ) <£ 手部姿 态 角为 :
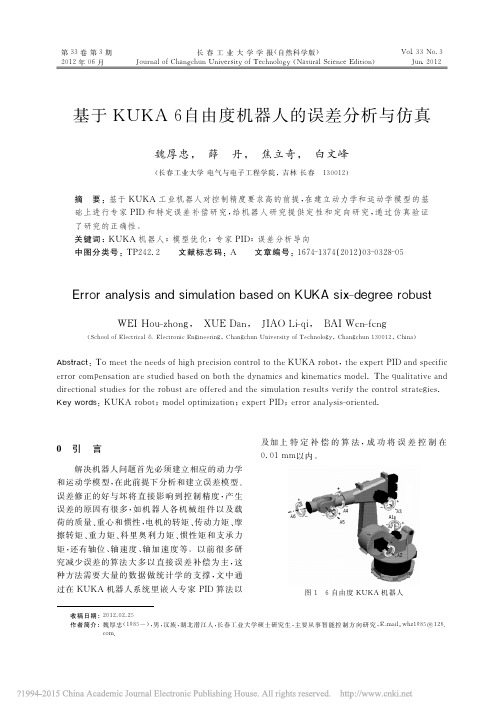
摘 要 :基 于 KUKA 工 业机器 人 对控 制精度 要求 高 的前提 , 在建 立 动力 学和 运 动学模 型 的基
础 上 进 行 专 家 P D 和 特 定 误 差 补 偿 研 究 , 机 器 人 研 究 提 供 定 性 和 定 向 研 究 , 过 仿 真 验 证 I 给 通 了研 究 的 正 确 性 。
[ - Oq,a q2
aq J
,
]
2 设 某一 构 件 角 速 度 7 , ) . 角加 速 度 7 旋 转 , U 2 ) 构件 产 生这种 运 动 所 需 的力 矩 M 可 由 欧 拉 方 程
式得 到 :
M ,一 J 叫 + : × ‘: , W () 2
将式() 5 写成 向量 方程 形 式为 :
V oI 3 .3 NO.3
Jn2 2 u . 01
基 于 KUKA 自由度 机 器 人 的误 差 分 析 与仿 真 6
魏 厚 忠 , 薛 丹 , 焦 立 奇 , 白文 峰
( 春 工 业 大 学 电气 与 电 子 工 程 学 院 ,吉林 长 春 10 1 ) 长 3 0 2
广 义力 , 有 则 Y 一 [ 。 . Y …Y y
Q= = + Y =P
( 1 1)
( 2 1)
六自由度搬运机器人的误差分析及仿真验证研究
六自由度搬运机器人的误差分析及仿真验证研究摘要:六自由度搬运机器人总体精度,属于其总体性能重要的一项衡量指标,因该机器人总体运动过程当中潜在着一定的定位误差,以至于它的实际运动和预期运动会有偏差存在,只有积极落实误差分析,才能够将这一误差缩小,为机器人总体精度的提升奠定基础。
鉴于此,本文主要围绕着六自由度搬运机器人开展误差分析与其仿真验证,旨在为业内相关人士提供参考。
关键词:机器人;搬运;六自由度;误差;仿真验证前言:六自由度搬运机器人若是存在着误差,则会致使它实际运动和预设指令运动之间会有偏差产生,需要加以分析及修正处理。
因而,对六自由度搬运机器人实施误差分析与其仿真验证,有着一定的现实意义和价值。
1、六自由度搬运机器人总体误差分析1.1 在运动学基础模型及其误差分析方面一是,针对机器人的D-H参数基础模型方面。
D-H经典的参数模型,即对于机器人的连杆及其关节部位实施简单建模分析的一种方法,该方法之下对于机器人总体结构顺序及其复杂程度方面无明确特殊要求,能够应用到任何类型机器人当中实施理论建模及其分析,具体模型详如图1所示。
该列式当中,αn+1代表两个临近Z轴相互间的一个夹角;a n+1代表每条共垂线实际长度参数;d n+1代表Z轴上面两条临近共垂线的间距;θn+1代表绕着Z轴实际旋转角参数[1];二是,针对MD-H修正参数基础模型方面。
机器人总体装配过程当中,较难确保临近两轴处于完全的平行状态,临近两个关节轴线实际平行度潜在微小偏差情况下,致使机器人的D-H参数基础模型有较大偏差产生。
对此,为能够将该问题有效解决,需要把临近位姿变换整个矩阵右乘围绕着y轴持续转动的一个变换矩阵,以此获取MD-H修正参数基础模型,详如图2所示,其中的βn+1代表绕着y轴位置实际转动角参数。
图1 机器人的D-H参数基础模型示意图图2 MD-H修正参数基础模型示意图针对误差分析方面,机器人的几何参数总体误差,现阶段以固定参数及关节变量这两方面的误差为主,△αi、△d i、△a i各自代表着扭转角、连杆偏置、连杆长度方面的误差,均为固定参数类型的误差,通常是由加工及装配误差、尺寸公差等起着决定作用。
基于MATLAB的六自由度工业机器人运动分析及仿真

基于MATLAB的六自由度工业机器人运动分析及仿真六自由度工业机器人是一种常见的工业自动化设备,通过对其运动进行分析和仿真,可以对其性能进行评估和优化。
MATLAB是一种强大的数学计算软件,在工程领域广泛应用,可以帮助我们进行机器人的运动分析和仿真。
首先,我们可以使用MATLAB对六自由度机器人进行建模。
六自由度机器人具有六个自由度,分别为三个旋转自由度和三个平移自由度。
我们可以使用MATLAB的机器人工具箱来建立机器人的模型,并定义其关节参数和连接方式。
通过模型可以获得机器人的几何结构、动力学参数和运动学方程。
接下来,我们可以使用MATLAB进行机器人的运动分析。
运动分析是指通过对机器人的运动学和动力学进行计算,从而获得机器人的运动和力学特性。
机器人的运动学分析主要是利用机器人的几何结构来推导出末端执行器的位置和姿态。
可以使用MATLAB的运动学工具函数来计算机器人的正运动学和逆运动学。
机器人的动力学分析主要是研究机器人的运动和力学特性之间的关系。
动力学分析可以帮助我们确定机器人的运动特性和关节力矩。
我们可以使用MATLAB的动力学工具箱来建立机器人的动力学模型,并使用动力学工具函数来计算机器人的动力学性能。
最后,我们可以使用MATLAB进行机器人的仿真。
机器人的仿真是通过对机器人的动力学进行数值计算,来模拟机器人的运动和力学特性。
通过仿真可以验证机器人的设计和控制方案,并进行参数优化。
在MATLAB 中,我们可以使用数值计算函数和绘图函数来进行机器人的仿真和可视化。
总结起来,基于MATLAB的六自由度工业机器人运动分析及仿真可以帮助我们对机器人的运动和力学特性进行研究和优化。
通过建立机器人的模型,进行运动分析和动力学分析,以及进行仿真和可视化,可以帮助我们理解和改进机器人的性能,在工业自动化领域发挥更大的作用。
基于MATLAB的六自由度工业机器人运动分析及仿真
基于MATLAB的六自由度工业机器人运动分析及仿真摘要:工业机器人是现代制造工业中广泛应用的先进装备之一,其主要功能是进行重复、高精度和高负荷的工作。
机器人的运动分析和仿真是机器人研究中一个重要的方面,可以通过模拟机器人的运动过程来优化机器人的工作效率和准确性。
本文基于MATLAB环境,对六自由度的工业机器人进行运动分析和仿真研究,提供一种快速、准确且可靠的方法。
引言:工业机器人具有广泛的应用领域,包括汽车制造、电子设备组装、医疗设备等。
机器人的运动分析和仿真是机器人研究中的一个重要步骤,可以帮助工程师优化机器人的设计和运动控制算法。
MATLAB是一种强大的科学计算和虚拟实验环境,可以用于机器人的运动分析和仿真。
方法:本文基于MATLAB环境,采用正运动学和逆运动学方法实现了六自由度工业机器人的运动分析和仿真。
正运动学通过已知关节角度计算机器人末端执行器的位置和姿态。
逆运动学则根据给定的末端执行器的位置和姿态确定关节角度。
同时,使用MATLAB中的3D绘图工具箱将机器人的运动过程进行仿真展示。
结果与讨论:通过正运动学和逆运动学计算,可以得到机器人在给定关节角度下的位置和姿态信息。
MATLAB的3D绘图工具箱可以将机器人的运动过程以三维动画的形式展示出来,方便工程师对机器人的运动轨迹和工作空间进行可视化分析。
结论:本文基于MATLAB环境实现了六自由度工业机器人的运动分析和仿真,提供了一种快速、准确且可靠的方法。
通过正运动学和逆运动学计算,可以得到机器人在给定关节角度下的位置和姿态信息。
MATLAB的3D绘图工具箱可以将机器人的运动过程进行可视化展示,帮助工程师对机器人的运动轨迹和工作空间进行分析和优化。
1.邱华根.《现代机器人控制技术》,清华大学出版社,2024年。
2.张骞.《机器人学导论及控制技术》,电子工业出版社,2024年。
六自由度工业机器人末端误差补偿方法

六自由度工业机器人末端误差补偿方法哎呀,说起六自由度工业机器人,这玩意儿可真是个技术活儿。
你想想,这机器人得在工厂里头忙活,得精确地把零件从一个地方搬到另一个地方,或者在生产线上做各种复杂的动作。
但是,机器嘛,总不可能做到完美无缺,总会有那么点误差。
这时候,就需要我们这些聪明绝顶的工程师来想想办法,怎么把这些误差给补偿掉。
首先,咱们得明白,这六自由度工业机器人,它有六个可以自由活动的关节,每个关节都有自己的误差。
这些误差可能来自于机械加工的不精确,或者长时间使用后的磨损,或者是温度变化引起的材料膨胀收缩。
反正,这些误差加在一起,就可能导致机器人的动作和我们预想的不一样。
那么,怎么补偿这些误差呢?这就需要我们用到一些高级的数学和算法了。
首先,我们得测量出这些误差。
这可不是随便拿个尺子量量那么简单,得用到一些高精度的传感器,比如编码器、激光测距仪之类的。
这些传感器可以实时地告诉我们机器人的关节现在是什么状态,和我们预想的状态有什么差别。
接下来,我们得分析这些误差。
这就需要用到一些复杂的数学模型了,比如卡尔曼滤波器、神经网络之类的。
这些模型可以帮助我们从一大堆数据中找出规律,预测出机器人的动作误差。
最后,我们就得根据这些分析结果,对机器人的动作进行调整。
这就需要用到一些控制算法了,比如PID控制、自适应控制之类的。
这些算法可以根据误差的大小,自动地调整机器人的动作,让机器人的动作尽可能地接近我们预想的状态。
举个例子吧,比如说,我们发现机器人的一个关节在转动时,总是比我们预想的多转了0.5度。
那我们就可以设计一个控制算法,每当这个关节转动时,就自动地减少0.5度的转动量,这样就可以补偿掉这个误差了。
当然,这个过程说起来简单,实际操作起来可是相当复杂的。
需要我们不断地测试、调整、优化,才能让机器人的动作越来越精确。
但是,只要我们坚持不懈,总能找到最好的解决方案。
总之,六自由度工业机器人的末端误差补偿,虽然听起来高大上,但其实也就是个不断试错、不断改进的过程。
基于ADAMS的六自由度关节型搬运机器人运动学仿真分析
基于ADAMS 的六自由度关节型搬运机器人运动学仿真分析高大华,胡晓兵(四川大学制造科学与工程学院,四川成都 610065)摘要:运用D-H 方法建立机器人运动学方程,分析正、逆运动学问题的解法。
详细介绍了在ADAMS 中建立机器人几何模型的过程,并对其在一个搬运周期内的运动过程进行了运动学的仿真,求出了各关节逆运动学解并分析了各运动关节的位移特性曲线。
仿真结果分析表明,各关节运动易于实时控制,精度满足要求。
关键词:AD AMS;关节型机器人;运动学仿真中图分类号:TP24 文献标识码:A 文章编号:1672-1616(2010)01-0037-04 机械系统的运动学仿真分析自20世纪80年代出现后,便作为一项新兴的技术得到广泛的应用。
ADAMS 是世界上最负盛名的机械系统仿真分析软件,使用它可以生成复杂机械系统的虚拟样机,真实地仿真其运动过程,并且可以迅速地分析和比较多种参数方案,直至获得优化的工作性能,缩短开发周期和降低研制费用,并提高设计质量。
本文结合实际工业环境中的搬运机器人的运动特点(点到点的运动),利用ADAMS 对实际搬运过程进行运动学仿真,求出运动学逆解,并对各运动关节的位姿进行研究(位移分析),为进一步的轨迹规划奠定基础。
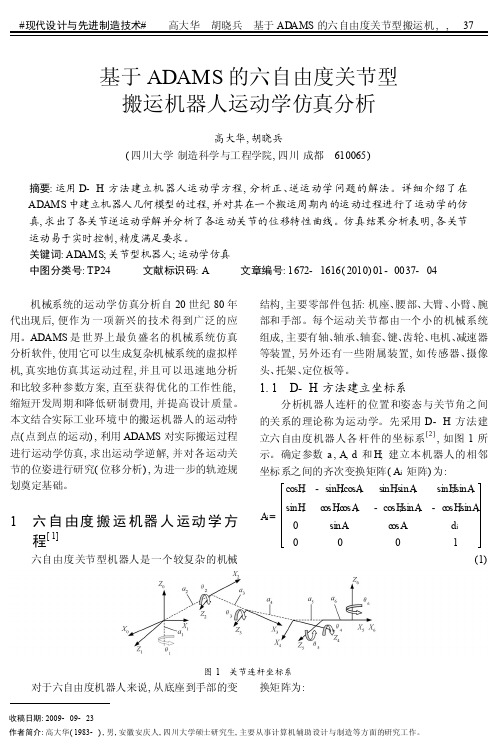
1 六自由度搬运机器人运动学方程[1]六自由度关节型机器人是一个较复杂的机械结构,主要零部件包括:机座、腰部、大臂、小臂、腕部和手部。
每个运动关节都由一个小的机械系统组成,主要有轴、轴承、轴套、键、齿轮、电机、减速器等装置,另外还有一些附属装置,如传感器、摄像头、托架、定位板等。
1.1 D -H 方法建立坐标系分析机器人连杆的位置和姿态与关节角之间的关系的理论称为运动学。
先采用D-H 方法建立六自由度机器人各杆件的坐标系[2],如图1所示。
确定参数a ,A ,d 和H ;建立本机器人的相邻坐标系之间的齐次变换矩阵(A i 矩阵)为:A i =cos H i -sin H i cos A isin H i sin A i sin H i sin A isin H i c os H i c os A i -cos H i sin A i -c os H i sin A i0sin A i c os A i d i 01(1)图1 关节连杆坐标系对于六自由度机器人来说,从底座到手部的变换矩阵为:收稿日期:2009-09-23作者简介:高大华(1983-),男,安徽安庆人,四川大学硕士研究生,主要从事计算机辅助设计与制造等方面的研究工作。
六自由度工业搬运机器人的运动特性分析及仿真研究
・32・机械2021年第2期第48卷六自由度工业搬运机器人的运动特性分析及仿真研究王哲,孟广耀*,孙英暖,王维信(青岛理工大学机械与汽车工程学院,山东青岛266520)摘要:针对目前国内外移动关节在多自由度机器人上研究和应用较少的现状,本文设计了一款具有移动关节的六自由度机器人并将其应用于工业搬运作业。
利用MD-H法建立该机器人的运动学模型,并推导出它的正逆运动学公式。
在MATLAB软件的Robotics Toolbox平台下建立该机器人的仿真模型对正逆运动学公式进行验证并运用蒙特卡洛法生成它的工作空间点云图。
仿真结果表明,该机器人的工作空间变化平缓且无明显空腔,从而说明机器人结构设计的合理性。
最后对其轨迹进行分析并生成各关节变量和笛卡尔坐标分量随时间的变化曲线。
关键词:移动关节;运动学;漿特卡洛;工作空间;轨迹分析中图分类号:TP242.2文献标志码:A doi:10.3969/j.issn.l006-0316.2021.02.005文章编号:1006-0316(2021)02-0032-10Analysis and Simulation of the Motion Characteristics of a6-DOF Industrial Handling Robot WANG Zhe,MENG Guangyao,SUN Yingnuan,WANG Weixin(School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao266520,China) Abstract:In view of the lack of the research and application of mobile joints at home and abroad on multi-degree-of-freedom robots,a six-degree-of-freedom robot with mobile joints is designed and applied to industrial handling operations.The kinematics model of the robot is established by MD-H method,and its forward and inverse kinematics formulas are derived.The simulation model of the robot is built on the Robotics Toolbox platform of MATLAB software to verify the forward and inverse kinematics formulas and its workspace point cloud image is generated through the Monte Carlo method.The simulation result shows that the working space of the robot changes smoothly and there is no obvious cavity,which demonstrates the rationality of the structural design of the robot.Finally,the trajectory is analyzed and the time-varying curve of each joint variable and Cartesian coordinate component is generated.Key words:mobile joint;kinematics;Monte Carlo;workspace;trajectory analysis自1961年第一台工业机器人Unimate问世以来[1],机器人开始登上现代化生产的舞台。
六自由度搬运机器人动力学分析及仿真
d y n a m i c s i mu l t a i o n W s a c a r r i e d O U t , a n d t h e t o r q u e c u r v e s fr o o t a t i n g j o i n t s w e r e o b t a i n e d . B a s e d o n t h e M A T L A B s o t f w re a , t h e n u me r i c a l a n a l y s s i ft o h e@ ̄ a mi c m o d e l W s a c a r r i e d o u t nd a t h e t o r q u e c u r p e s w e r e p l o t t e d ,t h e t h e o r e t c i a l a n a l y s i s
第 1 期
2 0 1 7年 1月 Βιβλιοθήκη 机 械 设 计 与 制 造
Ma c h i n e r y De s i g n & Ma n u f a c t ur e
六 自由 度搬 运机 器人 动 力学分析及仿 真
王殿 君 , 关似 玉 , 陈 亚, 刘 占 民
( 北京石油化工学院 机械工程学院 , 北京 1 0 2 6 1 7 )
关键词 : 搬运机器人 ; 动力学模型 ; 拉格 朗日法 ; 动力学仿真
中图分类号 : T H1 6 ; T P 2 4 2 . 2 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 7 ) 0 1 — 0 0 2 5 — 0 5
Dy n a mi c An a l y s i s a n d Si mu l a t i o n o f t h e Ca r r y i n g Si x - - DOF Ro b o t WA N G D i a n - j u n , G U A N S i - y u , C HE N Y a , L I U Z h a n — m i n
六自由度工业机器人的建模与仿真研究共3篇
六自由度工业机器人的建模与仿真研究共3篇六自由度工业机器人的建模与仿真研究1六自由度工业机器人的建模与仿真研究随着工业自动化的不断发展,工业机器人已经成为工厂中不可或缺的重要设备之一。
其中,六自由度工业机器人因其具有灵活性强、运动范围广等优点而得到广泛应用。
因此,对于六自由度工业机器人的建模和仿真研究具有非常重要的意义。
一、六自由度工业机器人的概述六自由度工业机器人是指具有6个自由度的工业机器人,通常由机身、驱动器和控制器组成。
其中,机身由臂、手和手腕组成,可根据任务需求进行操作或载物。
驱动器是机身各部分的驱动器件,常用的驱动器有电机、气缸等。
控制器是控制机器人的核心部分,可完成运动的规划、控制和反馈等。
二、六自由度工业机器人的建模六自由度工业机器人的建模是建立机器人的数学模型,目的是为了分析机器人的运动规律和控制过程,同时也是设计自动控制器的重要基础。
1. 正向运动学模型正向运动学模型是指将机器人的变量作为输入,根据手臂各段的长度和角度、各关节的偏转角度等信息,计算机器人的末端位置、姿态等信息的模型。
这个模型对机器人的分析非常重要,因为它可以方便地解决机器人的直观显示、位置控制等问题。
在建模时,需要对机器人进行分段处理,每一段均要计算其末端的位置和姿态信息,并将其传递到下一段中。
2. 逆向运动学模型逆向运动学模型是指将机器人所需的输出信息作为输入,根据末端位置、姿态等信息,反推出机器人各关节需要转动的角度等信息的模型。
这个模型对机器人的姿态调节、轨迹规划等问题非常重要。
3. 动力学模型动力学模型是指对机器人的力学特性进行建模,为机器人的运动规划和控制提供必要的参考和依据。
在建模时,需要考虑力、转矩、惯性等因素,并通过控制器控制机器人的动作。
三、六自由度工业机器人的仿真研究仿真是对机器人进行数字化模拟的过程。
通过仿真,可以在事先构建好的环境中,对机器人进行各种测试和优化,进而提高其运动精度、速度和稳定性等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。