六轴运动机器人运动学求解分析_第九讲
机器人运动学和动力学分析及控制

机器人运动学和动力学分析及控制引言随着科技的不断进步,机器人在工业、医疗、军事等领域发挥着越来越重要的作用。
而机器人的运动学和动力学是支撑其运动和控制的重要理论基础。
本文将围绕机器人运动学和动力学的分析及控制展开讨论,探究其原理与应用。
一、机器人运动学分析1. 关节坐标和笛卡尔坐标系机器人运动学主要涉及的两种坐标系为关节坐标系和笛卡尔坐标系。
关节坐标系描述机器人每个关节的转动,而笛卡尔坐标系则描述机器人末端执行器在三维空间中的位置和姿态。
2. 正运动学和逆运动学正运动学问题是指已知机器人每个关节的位置和姿态,求解机器人末端执行器的位置和姿态。
逆运动学问题则是已知机器人末端执行器的位置和姿态,求解机器人每个关节的位置和姿态。
解决机器人正逆运动学问题对于实现精确控制非常重要。
3. DH参数建模DH参数建模是机器人运动学分析中的重要方法。
它基于丹尼尔贝维特-哈特伯格(Denavit-Hartenberg, DH)方法,将机器人的每个关节看作旋转和平移运动的连续组合。
通过矩阵变换,可以得到机器人各个关节之间的位置和姿态关系。
二、机器人动力学分析1. 动力学基本理论机器人动力学研究的是机器人在力、力矩作用下的运动学规律。
通过牛顿-欧拉方法或拉格朗日方程,可以建立机器人的动力学模型。
动力学模型包括质量、惯性、重力、摩擦等因素的综合考虑,能够描述机器人在力学环境中的行为。
2. 关节力和末端力机器人动力学分析中的重要问题之一是求解机器人各个关节的力。
关节力是指作用在机器人各个关节上的力和力矩,它对于机器人的稳定性和安全性具有重要意义。
另一个重要问题是求解末端执行器的力,这关系到机器人在任务执行过程中是否能够对外界环境施加合适的力。
3. 动力学参数辨识为了建立精确的机器人动力学模型,需要准确测量机器人的动力学参数。
动力学参数包括质量、惯性、摩擦等因素。
动力学参数辨识是通过实验方法,对机器人的动力学参数进行测量和估计的过程。
机器人运动学与动力学分析
机器人运动学与动力学分析引言:机器人技术是当今世界的热门话题之一。
从生产领域到服务领域,机器人的应用越来越广泛。
而要实现机器人的精确控制和高效运动,机器人运动学与动力学分析是必不可少的基础工作。
本文将介绍机器人运动学与动力学分析的概念、方法和应用,并探讨其在现代机器人技术中的重要性。
一、机器人运动学分析机器人运动学分析是研究机器人运动的位置、速度和加速度等基本特性的过程。
运动学分析主要考虑的是机器人的几何特征和相对运动关系,旨在通过建立数学模型来描述机器人的运动路径和姿态。
运动学分析通常可以分为正逆解两个方面。
1. 正解正解是指根据机器人关节位置和机构参数等已知信息,计算出机器人末端执行器的位置和姿态。
正解问题可以通过利用坐标变换和关节运动学链式法则来求解。
一般而言,机器人的正解问题是一个多解问题,因为机器人通常有多个位置和姿态可以实现。
2. 逆解逆解是指根据机器人末端执行器的位置和姿态,计算出机器人关节位置和机构参数等未知信息。
逆解问题通常比正解问题更为复杂,因为存在多个解或者无解的情况。
解决逆解问题可以采用迭代法、几何法或者数值优化方法。
二、机器人动力学分析机器人动力学分析是研究机器人运动的力学特性和运动控制的基本原理的过程。
动力学分析主要考虑机器人的力学平衡、力学约束和运动方程等问题,旨在实现机器人的动态建模和控制。
1. 动态建模动态建模是研究机器人在外力作用下的力学平衡和运动约束的数学描述。
通过建立机器人的运动方程,可以分析机器人的惯性特性、静力学特性和动力学特性。
机器人的动态建模是复杂的,需要考虑关节惯性、关节力矩、摩擦因素等多个因素。
2. 控制策略机器人动力学分析的另一个重要应用是运动控制。
根据机器人的动态模型,可以设计控制策略来实现机器人的精确运动。
常见的控制方法包括PID控制、模糊控制、自适应控制等。
通过合理选择控制策略和调节参数,可以实现机器人的平滑运动和高精度定位。
三、机器人运动学与动力学分析的应用机器人运动学与动力学分析在现代机器人技术中具有重要的应用价值。
求解机器人运动学方程的步骤
求解机器人运动学方程的步骤嘿,咱今儿个就来说说求解机器人运动学方程的那些事儿!你想想啊,机器人就像个超级厉害的小机灵鬼,要让它乖乖听话,就得搞清楚它咋运动的呀!
第一步呢,那可得先把机器人的结构给摸透咯!就好比你要了解一个新朋友,得知道他的胳膊腿儿都长啥样,怎么活动的。
这一步可不能马虎,得仔细研究机器人的各个关节啊、连杆啊啥的。
第二步呢,就像是给机器人搭积木一样,得把那些关节和连杆之间的关系给理清楚。
这就像是搭房子,得把砖头一块块稳稳地放好,才能盖出结实的房子来。
第三步呀,咱就得用一些数学魔法啦!什么三角函数啦、矩阵啦,都得派上用场。
这就好像是给机器人施了个魔法咒语,让它能按照咱的想法动起来。
第四步呢,可别小瞧了,得反复验证。
就跟你考试做完题得检查一样,看看算得对不对,机器人能不能真的按照咱想的那样动。
你说这求解机器人运动学方程难不难?当然难啦!但咱要是把每一步都走踏实了,就像走楼梯一样,一步一个脚印,那也能攻克这个难关呀!
你再想想,要是咱能轻松搞定机器人的运动学方程,那多牛啊!就好像咱掌握了机器人的小秘密,能指挥它干啥就干啥。
这感觉,是不是超棒?
而且啊,这就跟解谜题一样,一点点地解开,最后找到答案,那成就感,简直爆棚!你说是不是?咱可不能被这小小的方程给难住咯,得鼓起劲儿来,跟它斗一斗!
所以啊,求解机器人运动学方程虽然有挑战,但咱别怕呀!只要咱用心去研究,去琢磨,肯定能搞定它!加油吧,小伙伴们!让我们一起征服机器人运动学方程这个小怪兽!。
机器人 运动学
机器人运动学机器人运动学机器人运动学是研究机器人运动规律和运动控制的学科。
它是机器人技术的重要组成部分,对于机器人的设计、控制和应用具有重要意义。
机器人运动学主要研究机器人在空间中的运动规律,包括位置、速度和加速度等。
通过研究机器人的运动学特性,可以实现对机器人的精确控制和规划。
机器人运动学主要包括正运动学和逆运动学两个方面。
正运动学是指根据机器人关节的位置和长度,求解机器人末端执行器的位置。
它通过解析几何、向量运算和矩阵变换等数学方法,将机器人关节的位置参数转化为末端执行器的位置参数,从而实现对机器人的位置控制。
逆运动学是指根据机器人末端执行器的位置,求解机器人关节的位置和长度。
逆运动学是机器人运动学的核心内容,也是机器人控制的关键问题之一。
通过逆运动学,可以实现对机器人末端执行器的精确控制,从而实现机器人在空间中的精确定位和定向。
机器人运动学的研究还包括机器人的姿态和轨迹规划。
姿态是指机器人在空间中的朝向和姿势,轨迹是指机器人在运动过程中的路径和速度。
通过研究机器人的姿态和轨迹规划,可以实现机器人在复杂环境中的灵活运动和避障控制。
机器人运动学的应用非常广泛。
在工业领域,机器人运动学被应用于自动化生产线的控制和优化,实现了生产效率的提高和生产成本的降低。
在医疗领域,机器人运动学被应用于手术机器人的控制和操作,实现了微创手术和精确手术的目标。
在军事领域,机器人运动学被应用于无人飞机和无人车辆的控制和导航,实现了作战效能的提高和战场风险的降低。
机器人运动学的发展离不开先进的传感器和控制技术的支持。
传感器可以实时感知机器人的位置和环境信息,控制技术可以根据机器人的位置和运动规律,实现对机器人的精确控制和运动规划。
总结起来,机器人运动学是研究机器人运动规律和运动控制的学科,主要包括正运动学、逆运动学、姿态和轨迹规划等内容。
机器人运动学的研究和应用对于机器人技术的发展和应用具有重要意义,将为我们创造更多的便利和机会。
机器人运动学

机器人运动学机器人运动学是研究机器人运动和姿态变化的一门学科。
它通过分析机器人的构造和动力学参数,研究机器人在特定环境下的运动规律和遵循的动力学约束,以实现机器人的准确控制和运动规划。
本文将从机器人运动学的基本概念、运动学模型、运动学正解和逆解等方面进行介绍。
1. 机器人运动学的基本概念机器人运动学是机器人学中的一个重要分支,主要研究机器人在空间中的运动状态、末端执行器的位置和姿态等基本概念。
其中,运动状态包括位置、方向和速度等;末端执行器的位置和姿态是描述机器人末端执行器在空间中的位置和朝向。
通过研究和分析这些基本概念,可以实现对机器人运动的控制和规划。
2. 运动学模型运动学模型是机器人运动学研究的重要工具,通过建立机器人的运动学模型,可以描述机器人在运动过程中的运动状态和姿态变化。
常见的运动学模型包括平面机器人模型、空间机器人模型、连续关节机器人模型等。
每种模型都有其独特的参数和运动学关系,可以根据实际情况选择合适的模型进行分析和研究。
3. 运动学正解运动学正解是指根据机器人的构造和动力学参数,求解机器人末端执行器的位置和姿态。
具体而言,根据机器人的关节角度、关节长度和连杆长度等参数,可以通过连乘法求解机器人末端执行器的位姿。
运动学正解是机器人运动学中的常见问题,解决这个问题可以帮助我们了解机器人在空间中的运动规律和运动范围。
4. 运动学逆解运动学逆解是指根据机器人末端执行器的位置和姿态,求解机器人的关节角度。
反过来,控制机器人的运动状态就需要求解逆运动学问题。
运动学逆解是机器人运动学研究的重要内容之一,它的解决可以帮助我们实现对机器人的准确定位和控制。
总结:机器人运动学是研究机器人运动和姿态变化的学科,通过运动学模型、运动学正解和运动学逆解等方法,可以描述机器人的运动状态、末端执行器的位置和姿态。
深入研究机器人运动学,可以实现对机器人的准确控制和运动规划。
随着机器人技术的不断发展,机器人运动学的研究也得到了越来越广泛的应用和重视。
举例说明机器人运动学正解的求解过程 -回复

举例说明机器人运动学正解的求解过程-回复机器人运动学正解是指根据机器人的关节坐标和末端执行器坐标来计算机器人的关节变量,以实现特定的末端执行器运动。
在此过程中,通过利用几何学和代数学的知识,可以推导出机器人的正解方程,并将其转化为求解关节变量的问题。
下面将详细介绍机器人运动学正解的具体求解过程。
1. 建立机器人的坐标系:首先,需要确定机器人坐标系的建立方式。
一般来说,机器人坐标系可以分为基座标系(也称为基座标系)和末端执行器坐标系。
基座标系用于描述机器人的位置和朝向,而末端执行器坐标系用于描述机器人末端执行器的位置和朝向。
2. 确定机器人的关节参数:机器人的关节参数包括关节长度、关节角度、关节型号等。
这些参数的确定是根据机器人的实际结构和设计需求来确定的。
3. 建立机器人的正解方程:机器人的正解方程描述了机器人的末端执行器坐标与关节坐标之间的关系。
一般来说,机器人的正解方程可以通过运动学链式法则得到。
链式法则是基于连续的变换矩阵构建的,每个关节均有一系列变换矩阵,最终得到机器人的正解方程。
4. 求解机器人的正解方程:根据机器人的正解方程,我们可以将末端执行器坐标作为已知量,求解关节变量。
这一步可以通过将正解方程转化为一个线性方程组来实现。
一般来说,线性方程组的求解可以通过矩阵运算或数值计算方法来实现。
5. 解的复现和验证:求解得到的关节变量需要进行复现和验证。
这一步可以通过将求解得到的关节变量带入机器人的正解方程中,计算得到新的末端执行器坐标,与原始的末端执行器坐标进行对比,以验证求解结果的准确性。
总结起来,机器人运动学正解的求解过程包括建立机器人的坐标系、确定机器人的关节参数、建立机器人的正解方程、求解机器人的正解方程以及解的复现和验证。
这一过程需要运用几何学、代数学和数值计算等知识,通过推导和计算来实现机器人的正解。
通过机器人运动学正解,我们可以根据给定的末端执行器坐标来计算机器人的关节变量,从而实现特定的末端执行器运动。
机器人运动学正解逆解课件

在机器人力控制中,需要知道每个关节的角度变化来调整 机器人的姿态和力矩。逆解可以用于求解每个关节的角度 变化,从而调整机器人的姿态和力矩。
机器人定位
在机器人定位中,需要知道每个关节的角度变化来调整机 器人的位置和姿态。逆解可以用于求解每个关节的角度变 化,从而调整机器人的位置和姿态。
04
实现复杂运动轨迹
利用运动学正解与逆解,可以规划出 复杂的运动轨迹,满足各种应用需求 。
02
机器人运动学正解
正解的基本概念
正解是指机器人末端执行器从某一初 始位置和姿态到达目标位置和姿态所 需经过的关节角度值。
正解是机器人运动学中的基本问题, 是实现机器人精确控制和自主导航的 基础。
正解的求解方法
逆解的求解方法
01
代数法
通过建立机器人关节角度与目标点坐标之间的方程组,利用数学软件求
解方程组得到关节角度。这种方法适用于简单的机器人结构,但对于复
杂机器人结构求解过程可能较为繁琐。
02
数值法
通过迭代或搜索的方法,不断逼近目标点坐标,最终得到满足要求的关
节角度。这种方法适用于复杂机器人结构,但求解时间较长且可能存在
机器人运动学正解逆解课件
目 录
• 机器人运动学概述 • 机器人运动学正解 • 机器人运动学逆解 • 机器人运动学正逆解的对比与联系 • 机器人运动学正逆解的实例分析
01
机器人运动学概述
定义与分类
定义
机器人运动学是研究机器人末端 执行器位姿与关节变量之间的关 系的学科。
分类
根据机器人的结构和运动特性, 可以分为串联机器人和并联机器 人。
局部最优解。
03
解析法
通过几何学和代数学的方法,直接求解关节角度与目标点坐标之间的关
六自由度机器人的运动学分析

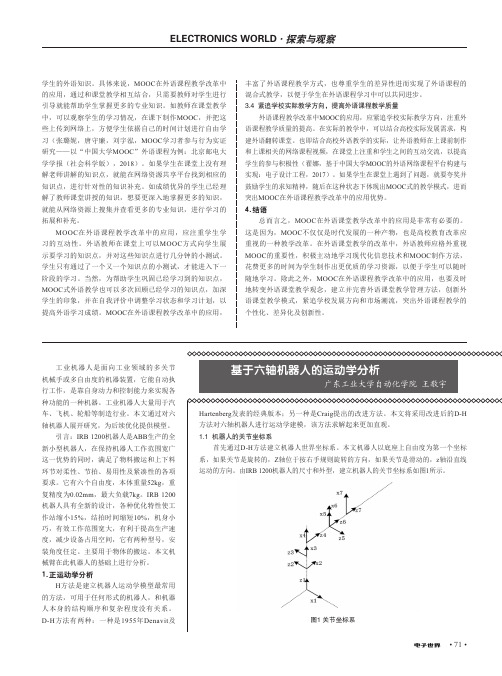
六自由度机器人的运动学分析王梦涛;张良安【摘要】For a developed 6 degree-of-freedom robot with 2,3 and 4-axis parallelled to each other, a forward kine-matics equation of the robot was acquired by establishing the link coordinate system and transformation matrix with D-H(Denavit-Hartenberg) method. Based on the idea of matrix inversion, the inverse kinematics calculation method of 6 degree-of-freedom robot was proposed, and all analytical solutions of the inverse kinematics were obtained. According to the singularity of the robot, the processing method of the inverse solution of the singular position was proposed, the forward kinematics model and inverse kinematics solution were verified by Robotics Toolbox in MATLAB software. The research results provide a basis for later trajectory planning and control of the robot, and it is a reference for the kinematics of the robot with similar structure.%针对一种自主研发的二三四轴相互平行的六自由度机器人,通过D-H(Denavit-Hartenberg)法建立机器人连杆坐标系和变换矩阵,求得正运动学方程,基于矩阵逆乘的思路进行逆运动学的求解,提出此类六自由度机器人逆运动学求解的方法,求出逆运动学的全部解析解.针对该机器人的奇异性,提出奇异位置逆解的处理方法,并用MATLAB机器人工具箱Robotics Tool-box验证了正解模型和逆解算法的正确性.研究结果为该机器人后续的轨迹规划和控制提供理论依据,对于具有相似结构的机器人运动学正逆解问题具有借鉴意义.【期刊名称】《安徽工业大学学报(自然科学版)》【年(卷),期】2016(033)004【总页数】7页(P365-371)【关键词】六自由度机器人;运动学;机器人工具箱;奇异性【作者】王梦涛;张良安【作者单位】安徽工业大学机械工程学院,安徽马鞍山243032;安徽工业大学机械工程学院,安徽马鞍山243032【正文语种】中文【中图分类】TP242.2在2015上海、苏州的工业机器人展览会上,众多机器人厂商纷纷推出其3~10kg轻载机器人产品,如日本那智不二越的MZ系列六自由度机器人、德国KUKA的LBR iiwa机器人、瑞士ABB的YuMi机器人等。
6轴机械臂逆解算法
6轴机械臂逆解算法逆解算法是指通过已知机械臂的末端工具位置,计算对应的关节角度的过程。
在六轴机械臂中,通常使用解析解法或数值解法来求解逆解。
1. 解析解法:解析解法是基于数学模型的方法,通常采用几何方法或代数方法来求解逆解。
对于六轴机械臂,在已知末端工具位置的情况下,可以利用正运动学的几何关系和三角函数关系来求解关节角度。
(1) 设置机械臂的运动学模型,可以得到输入的位置向量[x,y,z]和姿态矩阵[R11,R12,...,R33];(2) 根据机械臂的运动学模型,可以得到关节角度与位置和姿态之间的关系,即正运动学问题;(3) 根据已知的位置和姿态,可以通过三角函数等几何方法来求解出关节角度。
这种解析解法在理论上较为直观和简单,但是实际应用中可能会存在奇异点(奇异性)或者多解问题。
奇异点是指机械臂在某些位置或者姿态时,导致运动学模型无解或者解不唯一。
解决奇异点问题通常需要通过优化算法或者增加机械臂的自由度来处理。
2. 数值解法:数值解法是基于数值计算和迭代算法的方法,通过逼近和迭代的过程来求解逆解。
在数值解法中,通常使用优化算法或者迭代算法来计算逆解。
(1) 设置机械臂的运动学模型,并结合关节角度的约束条件;(2) 根据机械臂的运动学模型,可以得到关节角度与位置和姿态之间的关系,即正运动学问题;(3) 使用数值计算和迭代算法,通过逼近和调整关节角度的方法来求解逆运动学问题;(4) 优化算法和迭代算法的选择:可以使用梯度下降法、牛顿法、雅可比逆法等来求解逆解。
数值解法相对于解析解法更加通用和灵活,可以应用到各种机械臂的逆解求解中,但是计算效率可能较低,需要较多的迭代次数和计算量。
在实际应用中,逆解算法是机械臂控制和路径规划的关键步骤,可以实现机械臂在工作空间内的多样化运动和灵活性。
逆解算法的性能和精度对机械臂的控制、动作准确性和稳定性有很大的影响,因此需要根据具体应用场景和机械臂的特点选择合适的算法,提高机械臂的运动控制和规划能力。
六自由度机械臂的运动学分析
0 0 1 0 0 0 1 0 0 0 1 0
0 0 1 0
0 0 0 1 r1 0 0 1
符号定义如下: Rot(x, θ 6 ):旋转变换,表示绕 x 轴旋转了 θ 6 Trans(m,n,p):平移变换,表示坐标轴分别沿 x、 y、z 轴平移了 m、n、p
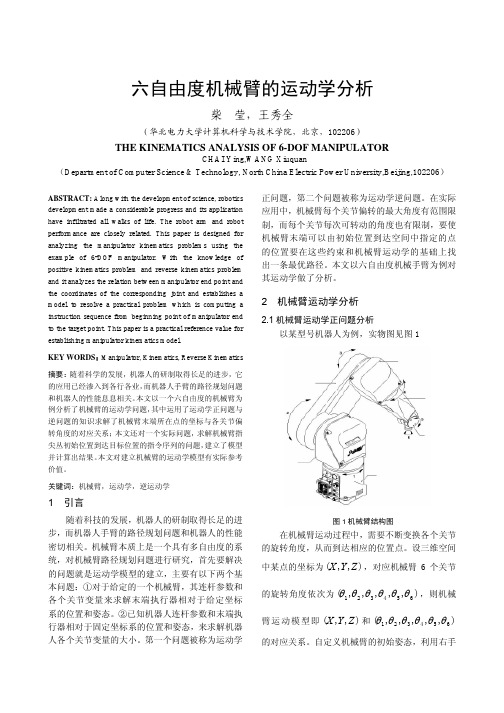
图 1 机械臂实物图
图 1 机械臂结构图
在机械臂运动过程中,需要不断变换各个关节 的旋转角度,从而到达相应的位置点。设三维空间 中某点的坐标为 ( X , Y , Z ) ,对应机械臂 6 个关节 的旋转角度依次为 (θ 1 , θ 2 , θ 3 , θ 4 , θ 5 , θ 6 ) ,则机械 臂 运 动 模 型 即 ( X , Y , Z ) 和 (θ 1 , θ 2 , θ 3 , θ 4 , θ 5 , θ 6 ) 的对应关系。自定义机械臂的初始姿态,利用右手
6
上式中, R 为旋转变换矩阵, p 平移变换矩阵 。 由上可知,当已知 6 个关节的偏转角度后即可 以通过矩阵求得对应机械臂的位置和姿态。 2.2 机械臂运动学逆问题 机械臂运动学的逆问题即:已知机械臂的指尖 末端坐标,求此时机械臂各个关节的偏转角度。可 以通过求逆矩阵的方法求解,即有如下方程 :
cosθ2 0 A2 = − sinθ2 0
0 sinθ2 0 1 0 0 0 cosθ2 0 0 0 1
0 0 1 0 0 0 1 0 0 0 1 0
0 0 r2 cosθ3 1 0 r2 sinθ3 0 1 0 0 0 1
0 1 0 0 cos θ4 − sinθ4 A4 = 0 sinθ4 cos θ4 0 0 0
0 1 0 0 0 0 1 0
机器人结构及其运动学分析

机器人结构及其运动学分析近年来,随着科技的飞速发展,机器人的出现为人类的生产和生活带来了巨大的变革。
在各种机器人中,工业机器人是其中最为常见的一种,其具有高效、快速、精准等特点,被广泛应用于各种生产领域。
而机器人的运动控制是机器人技术中极为重要的一环,而要想进行运动控制,就需要对机器人的结构和运动规律进行详细的分析和研究。
一、机器人结构机器人的结构是机器人控制的基础,机器人的结构通常是由基础结构、执行机构、感知机构、运动控制系统四部分组成。
1. 基础结构机器人的基础结构是机器人整体的支撑框架。
它具有一定的稳定性和刚性,可以确保机器人在各种工作状态下均能稳定运作。
基础结构的形状可以是圆柱形、球形、盒状等,根据机器人的各种功能和要求来设计。
2. 执行机构执行机构是机器人的臂架和手臂结构,也是直接进行任务的主要部分。
机器人臂架的长度、张角、工作空间等都是根据不同的任务设计的。
而手臂结构通常是根据不同的工具或手端进行设计,它可以通过旋转或弯曲等动作完成各种复杂的工作。
3. 感知机构感知机构是机器人的一种传感器,可以通过各种传感器实现机器人对环境和任务对象的感知和识别。
例如,光学传感器、声音传感器、温度传感器、力传感器等都是机器人中常见的感知机构。
4. 运动控制系统运动控制系统是机器人的核心部分,它可以实现机器人各种动作的控制和协调。
这个系统通常包括硬件和软件两个部分,硬件是指各种传感器、执行机构等设备,而软件则是指运动控制的程序和算法等。
二、机器人运动学分析机器人的运动学是机器人技术中不可或缺部分,它主要研究机器人的运动方程、姿态控制、轨迹规划等,具体分为正运动学和逆运动学两个方面。
1. 正运动学机器人的正运动学是根据机器人的运动规律和各个运动参数来确定机器人末端执行机构在笛卡尔坐标系下的位置。
根据数学公式可以得出正运动学方程,只需要知道机器人臂架和手臂的长度、深度、角度等参数就可以通过正运动学解算得到末端执行机构的位置。
六轴机器人工作原理
六轴机器人工作原理机械结构是六轴机器人的基础,它由六个旋转关节组成。
这些关节通过电机驱动,可以实现多种姿态的变换。
机器人的机械结构通常由铝合金和钢材制成,具有较高的刚度和稳定性。
机械结构中的关节通过大量的传动装置,如齿轮、皮带传动等,实现关节的旋转运动。
关节的旋转可以使机器人的末端执行器在空间中实现各种姿态变换。
传感器系统是六轴机器人的重要组成部分,它可以提供机器人的位置、速度以及力矩等关键信息,使其能够进行精确的控制和操作。
常见的传感器系统包括位置传感器、力矩传感器和视觉传感器等。
位置传感器通常用于测量机器人各个关节的角度,可以提供机器人当前的姿态信息。
位置传感器的常见类型有编码器、光电开关等。
力矩传感器用于测量机器人关节的力矩,可以提供机器人对外力的感知和响应能力。
视觉传感器可以实时获取机器人周围环境的图像信息,用于机器人的感知和路径规划。
控制系统是六轴机器人的核心,它负责接收传感器系统提供的信息,计算出适当的控制指令,并通过电机对机械结构进行控制。
控制系统通常由硬件和软件两个部分组成。
硬件方面,控制系统通常包括控制器、电机驱动器和信号处理器等。
其中,控制器是机器人系统的大脑,它通过与传感器系统和执行器的接口,实现信息的输入和输出。
电机驱动器用于控制电机的旋转运动,将控制指令转化为电机的转动力矩。
信号处理器负责处理传感器系统提供的信号,实现对机器人状态的实时监控和控制。
软件方面,控制系统通常包括运动控制算法、路径规划算法和碰撞检测算法等。
运动控制算法是控制系统的核心,它根据输入的控制指令和传感器反馈信息,计算出电机的控制信号,实现机器人的精确控制和运动。
路径规划算法用于确定机器人的运动路径,将任务要求转化为机器人关节的运动规划。
碰撞检测算法用于检测机器人与周围环境之间的碰撞关系,避免机器人在操作过程中发生碰撞。
总之,六轴机器人通过机械结构、传感器系统和控制系统的协同工作,实现对机器人姿态和力矩的控制,从而实现多种复杂任务的执行。
六轴机器人逆运动学求解 8个解
六轴机器人逆运动学求解是机器人领域中的重要问题,六轴机器人具有复杂的结构与运动学特性,其逆运动学求解是指在给定末端执行器姿态时,求解机器人各关节的角度,以实现特定的末端执行器姿态。
在机器人的运动控制与路径规划中,逆运动学求解是一个至关重要的环节。
六轴机器人通常具有6个自由度,这意味着机器人的末端执行器可以沿着6个不同的轴线进行运动。
在实际应用中,需要对机器人的运动轨迹、姿态等进行精确控制,这就要求对六轴机器人的逆运动学问题进行求解,以实现机器人的精准操作。
逆运动学问题的求解涉及矩阵运算、三角函数关系等数学知识,需要对机器人各关节的几何结构和运动学参数有深入的了解。
在六轴机器人中,每个关节的位置、方向等特征都会对逆运动学求解造成影响,因此需要综合考虑机器人的整体结构和特性。
六轴机器人逆运动学求解可以衍生出多个解,这意味着在给定末端执行器姿态时,存在多组关节角度可以实现相同的末端姿态。
这些解称为「多解」,这种情况在实际应用中会给机器人的精确定位和操作带来挑战。
对于六轴机器人逆运动学求解的多解问题,可以通过以下方法进行处理:1. 增加约束条件:在逆运动学求解中,可以增加额外的约束条件,如关节运动范围、碰撞检测等,以限制多解的产生,使得机器人能够选择出最优的关节角度组合。
2. 引入优化算法:可以利用优化算法对多解进行评估与筛选,选取出最优的解,以满足运动控制和操作精度的要求。
3. 结合遗传算法等智能算法:利用智能算法对多解进行搜索与优化,找到最适合的关节角度组合,提高机器人的运动控制精度和操作效率。
在实际应用中,六轴机器人逆运动学求解的多解问题是一个具有挑战性的课题,需要综合应用数学、控制理论与算法等多个学科的知识,以满足对机器人运动控制精度和操作效率的要求。
六轴机器人逆运动学求解是一个复杂而重要的问题,对于解决这一问题有益于机器人的应用。
我们相信,通过不断的研究和探索,一定能够找到更加高效和精确的逆运动学求解方法,为机器人技术的发展做出更大的贡献。
基于六轴机器人的运动学分析
• 71•学生的外语知识。
具体来说,MOOC在外语课程教学改革中的应用,通过和课堂教学相互结合,只需要教师对学生进行引导就能帮助学生掌握更多的专业知识。
如教师在课堂教学中,可以观察学生的学习情况,在课下制作MOOC,并把这些上传到网络上,方便学生依据自己的时间计划进行自由学习(张璐妮,唐守廉,刘宇泓,MOOC学习者参与行为实证研究——以“中国大学MOOC”外语课程为例:北京邮电大学学报(社会科学版),2018)。
如果学生在课堂上没有理解老师讲解的知识点,就能在网络资源共享平台找到相应的知识点,进行针对性的知识补充。
如成绩优异的学生已经理解了教师课堂讲授的知识,想要更深入地掌握更多的知识,就能从网络资源上搜集并查看更多的专业知识,进行学习的拓展和补充。
MOOC在外语课程教学改革中的应用,应注重学生学习的互动性。
外语教师在课堂上可以MOOC方式向学生展示要学习的知识点,并对这些知识点进行几分钟的小测试。
学生只有通过了一个又一个知识点的小测试,才能进入下一阶段的学习。
当然,为帮助学生巩固已经学习到的知识点,MOOC式外语教学也可以多次回顾已经学习的知识点,加深学生的印象,并在自我评价中调整学习状态和学习计划,以提高外语学习成绩。
MOOC在外语课程教学改革中的应用,丰富了外语课程教学方式,也尊重学生的差异性进而实现了外语课程的混合式教学,以便于学生在外语课程学习中可以共同进步。
3.4 紧追学校实际教学方向,提高外语课程教学质量外语课程教学改革中MOOC的应用,应紧追学校实际教学方向,注重外语课程教学质量的提高。
在实际的教学中,可以结合高校实际发展需求,构建外语翻转课堂。
也即结合高校外语教学的实际,让外语教师在上课前制作和上课相关的网络课程视频,在课堂上注重和学生之间的互动交流,以提高学生的参与积极性(翟娜,基于中国大学MOOC的外语网络课程平台构建与实现:电子设计工程,2017)。
如果学生在课堂上遇到了问题,就要夸奖并鼓励学生的求知精神,随后在这种状态下体现出MOOC式的教学模式,进而突出MOOC在外语课程教学改革中的应用优势。
串联六轴机械臂逆运动学几何解法
串联六轴机械臂逆运动学几何解法六轴机械臂是一种常见的工业自动化设备,它具有六个关节轴,可以实现对工件的精确定位和操作。
在机械臂控制中,逆运动学是一个非常重要的问题,它用于确定关节角度,以便实现指定末端执行器(机械臂末端)位置和姿态。
在本文中,我们将介绍一种常见的六轴机械臂逆运动学解法——几何法。
几何法是一种直观且简单的逆运动学解法,它基于机械臂的几何特性和运动约束。
对于六轴机械臂而言,它由六个关节轴组成,每个关节轴可以旋转而且相互独立。
机械臂的末端执行器可以通过关节轴的旋转来实现位置和姿态的变化。
因此,我们可以通过确定关节角度来解决逆运动学问题。
对于六轴机械臂逆运动学,我们首先需要了解机械臂的坐标系和关节坐标。
机械臂的坐标系是一个自定义的坐标系,用于描述机械臂的姿态和位置。
关节坐标是每个关节轴的角度值。
通过将机械臂的姿态和位置转化到关节坐标系中,我们可以得到逆运动学问题的解。
假设我们已知机械臂的末端执行器的位置和姿态,我们可以通过以下步骤来求解关节角度:1.建立基坐标系和机械臂末端坐标系。
基坐标系是一个固定的坐标系,而机械臂末端坐标系是一个相对于基坐标系移动和变形的坐标系。
通过坐标变换,我们可以将机械臂末端坐标系的位置和姿态转化到基坐标系中。
2.确定机械臂的DH参数。
DH参数是一组参数,用于描述机械臂各个关节轴之间的几何特性。
它包括关节轴的长度、关节轴之间的夹角、关节轴的旋转方向等。
通过给定机械臂的DH参数,我们可以建立机械臂的运动学模型。
3.建立机械臂的正运动学模型。
正运动学模型是一种数学模型,用于描述机械臂末端执行器的位置和姿态与关节角度之间的关系。
通过正运动学模型,我们可以将关节角度转化为末端执行器的位置和姿态。
4.求解逆运动学问题。
通过已知的末端执行器的位置和姿态,我们可以反解出对应的关节角度。
在求解过程中,我们可以利用数值计算的方法,例如数值迭代和优化算法。
以上是六轴机械臂逆运动学几何解法的基本步骤。
六自由度工业机器人正逆运动学
六自由度工业机器人正逆运动学
六自由度工业机器人具有6个关节,可以实现6个不同的运动自由度,分别是平移、转动、旋转、可在水平和垂直方向移动。
正运动学是指从机器人关节角度和长度参数计算出机器人末端执行器在空间中的位置和姿态的过程。
通过运动学方程,可以将关节角度和长度参数转换为空间中的位置和姿态。
逆运动学是指已知机器人末端执行器在空间中的位置和姿态,计算出机器人关节角度和长度参数的过程。
通过逆运动学方程,可以将空间中的位置和姿态转换为关节角度和长度参数。
正逆解的计算过程复杂且涉及到大量的三角函数和求解方程,需要使用数值计算方法进行求解。
此外,也需要考虑机器人的约束和限制条件,以确保计算得到的解是可行解。
六轴运动机器人运动学求解分析_第九讲
六轴运动机器人运动学求解分析_第九讲六轴联动机械臂运动学及动力学求解分析V0.9版随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。
作者朱森光************************完成时间 2016-02-281引言笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。
笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。
利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。
本文内容的正确性经过笔者编程仿真验证可以信赖。
2机器建模既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。
首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。
图2-1图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。
六轴关节机器人机械结构剖析
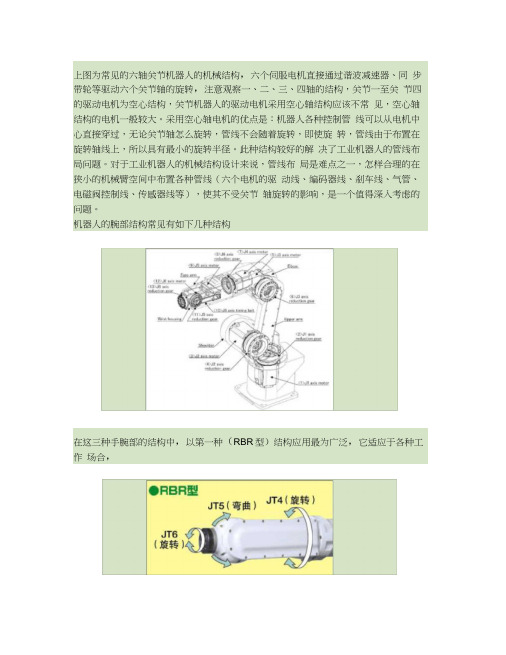
后两
种结构应用范围相对较窄,比如说3R 型的手腕结构主要应用在喷涂行业等.
关节设计:
对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经 有好几十年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对 来说比较成熟,他们在相互竞争中可以相互模仿、改善、不断推陈出新 ,他们的技 术对于国内来说,近乎完美•而国内目前这个行业还处在黎明前的黑暗阶段,虽然有 不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在 研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试 验成功,真正产业化、商品化还有一段相当漫长的路要走 •而更多的公司还停留在 项目立项、技术评估、投入风险分析的阶段•由于国内做这个行业的很少,相关的 结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别人 的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会
U ,还 好了 ,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们 做机械设计的(我应该也算是个机械工程师啊A _A 毕竟我也是做机械的)少走点弯路, 做出更好的机器.
六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动•小型 的六轴关节机器人的腕部关节主要采用谐波减速器.下面的图片较为详细的描述了 常见的六轴关节机器人的腕部结构.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六轴联动机械臂运动学及动力学求解分析V0.9版随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。
作者朱森光Email*******************完成时间 2016-02-281引言笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。
笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。
利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。
本文内容的正确性经过笔者编程仿真验证可以信赖。
2机器建模既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。
首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。
图2-1图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。
这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。
3运动学分析3.1齐次变换矩阵齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。
首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。
以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。
符号定义好了,接下来描述齐次变换矩阵。
定义R0为关节1绕Y轴的旋转矩阵=cosθ0 s0 = sinθ0//c0R0=[c0 0 s0 00 1 0 00 c0 0-s00 0 0 1]定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵T0=[1 0 0 x00 1 0 y000 1 00 0 0 1]定义R1为关节2绕Z1轴的旋转矩阵R1=[c1 –s1 0 0s1 c1 0 00 0 1 00 0 0 1]定义T1为坐标系O2X2Y2Z2相对坐标系O1X1Y1Z1的平移矩阵T1=[1 0 0 x10 1 0 00 0 1 00 0 0 1]定义R2为关节3绕Z2轴的旋转矩阵R2=[c2 –s2 0 0s2 c2 0 00 0 1 00 0 0 1]定义T2为坐标系O3X3Y3Z3相对坐标系O2X2Y2Z2的平移矩阵T2=[1 0 0 x20 1 0 00 0 1 00 0 0 1]定义R3为关节4绕X3轴的旋转矩阵R3=[1 0 0 00 c3 –s3 00 s3 c3 00 0 0 1]定义T3为坐标系O4X4Y4Z4相对坐标系O3X3Y3Z3的平移矩阵T3=[1 0 0 x30 1 0 00 0 1 00 0 0 1]定义R4为关节5绕Z4轴的旋转矩阵R4=[c4 –s4 0 0s4 c4 0 00 0 1 00 0 0 1]定义T4为坐标系O5X5Y5Z5相对坐标系O4X4Y4Z4的平移矩阵T4=[1 0 0 x40 1 0 00 0 1 00 0 0 1]定义R5为关节6绕X5轴的旋转矩阵R5=[1 0 0 00 c5 –s5 00 s5 c5 00 0 0 1]以上矩阵定义中c0、c1、c2、c3、c4、c5分别为cosθ0、cosθ1、cosθ2、cosθ3、cosθ4、cosθ5的简写,s0、s1、s2、s3、s4、s5分别为sinθ0、sinθ1、 sinθ2、sinθ3、sinθ4、sinθ5的简写。
至此最终的齐次变换矩阵就可以写出来了,那就是:C=R0*T0*R1*T1*R2*T2*R3*T3*R4*T4*R53.2正运动学求解正运动学求解就是求出3.1节中齐次变换矩阵C的解析表达式,下面求解。
C=R0*T0*R1*T1*R2*T2*R3*T3*R4*T4*R5=[Nx Ox Ax PxNy Oy Ay PyNz Oz Az Pz0001]这里要注意矩阵乘法满足结合律但不满足交换律,可以先单独求出R4*T4,R3*T3,R2*T2,R1*T1,R0*T0然后再将它们相乘,即C= (R0*T0)*(R1*T1)*(R2*T2)*(R3*T3)*(R4*T4)*R5最终得出结果如下:Nx=c0c1(c2c4-c3s2s4)-c0s1(s2c4+c2c3s4)+s0s3s4=s1(c2c4-c3s2s4)+c1(s2c4+c2c3s4)NyNz=-s0c1(c2c4-c3s2s4)+s0s1(s2c4+c2c3s4)+c0s3s4Ox= c0c1(-s4c2c5-s2c3c4c5+s2s3s5) –c0s1(-s2s4c5+c2c3c4c5-c2s3s5)+s0(s3c4c5+c3s5)Oy= s1(-s4c2c5-s2c3c4c5+s2s3s5) +c1(-s2s4c5+c2c3c4c5-c2s3s5)Oz= -s0c1(-s4c2c5-s2c3c4c5+s2s3s5)+s0s1(-s2s4c5+c2c3c4c5-c2s3s5)+c0(s3c4c5+c3s5)=c0c1(c2s4s5+c3c4s2s5+c5s2s3)-c0s1(s2s4s5-c2c3c4s5-c2c5s3)+s0(-c4s3s5+c3c5)AxAy= s1(c2s4s5+c3c4s2s5+c5s2s3) +c1(s2s4s5-c2c3c4s5-c2c5s3)Az=-s0c1(c2s4s5+c3c4s2s5+c5s2s3)+s0s1(s2s4s5-c2c3c4s5-c2c5s3)+c0(-c4s3s5+c3c5)=c0c1(x4c2c4-x4c3s2s4+x3c2+x2c2)-c0s1(x4c4s2+x4c2c3s4+x3s2+x2s2)+x1c0c1+x4s0s3s4+x0c0Px=s1(x4c2c4-x4c3s2s4+x3c2+x2c2)+x1s1+c1(x4c4s2+x4c2c3s4+x3s2+x2s2)+y0PyPz=-s0c1(x4c2c4-x4c3s2s4+x3c2+x2c2)+s0s1(x4c4s2+x4c2c3s4+x3s2+x2s2)- x1s0c1+ x4c0s3s4-x0s0矩阵C就是最终的六轴联动机械臂的齐次变换矩阵,如果机械手末端相对于坐标系O5X5Y5Z5的相对坐标为U(a,b,c),那么末端U在大地坐标系OXYZ中的坐标为:图3-1以上就是机器人正运动学的求解,Nx、Ny、Nz、Ox、Oy、Oz、Ax、Ay、Az、Px、Py、Pz表达式中的x0、y0、x1、x2、x3、x4为机械固有尺寸,θ0、θ1、θ2、θ3、θ4、θ5为六个关节的旋转角。
实际上C的子矩阵M=[Nx Ox AxNy Oy AyNz Oz Az]反应的就是末端坐标系O5X5Y5Z5的姿态,子矩阵M实际上就是轴O5X5、O5Y5、O5Z5在大地坐标系OXYZ下的方向余弦矩阵,而(Px,Py,Pz)就是点O5在大地坐标系OXYZ下的绝对坐标。
3.3逆运动学求解机器人逆运动学求解是根据末端位姿矩阵C反求六个关节的旋转角θ0、θ1、θ2、θ3、θ4、θ5的问题。
为了便于求解,这儿对C=R0*T0*R1*T1*R2*T2*R3*T3*R4*T4*R5等式进行变换,令S0=R0*T0,然后将等式两边同时左乘S0的逆S0-1得到:S0-1*C=R1*T1*R2*T2*R3*T3*R4*T4*R50 -s0-x0=[c0其中S0-10 1 0 -y0s0 0 c0 00 0 0 1]等式左边S0-1*C=[c0Nx-s0Nz c0Ox-s0Oz c0Ax-s0Az c0Px-s0Pz-x0Ny Oy Ay Py-y0S0Nx+c0Nz s0Ox+c0Oz s0Ax+c0Az s0Px+c0Pz0 0 0 1]等式右边R1*T1*R2*T2*R3*T3*R4*T4*R5=[c1(c2c4-c3s2s4)-s1(s2c4+c2c3s4) c1(-s4c2c5-s2c3c4c5+s2s3s5) c1(c2s4s5+c3c4s2s5+c5s2s3) c1(x4c2c4-x4c3s2s4+x3c2+x2c2)-s1(-s2s4c5+c2c3c4c5-c2s3s5) -s1(s2s4s5-c2c3c4s5-c2c5s3) -s1(x4c4s2+x4c2c3s4+x3s2+x2s2)+x1c1S1(c2c4-c3s2s4)+c1(s2c4+c2c3s4) s1(-s4c2c5-s2c3c4c5+s2s3s5) s1(c2s4s5+c3c4s2s5+c5s2s3) s1(x4c2c4-x4c3s2s4+x3c2+x2c2)+x1s1+c1(-s2s4c5+c2c3c4c5-c2s3s5) +c1(s2s4s5-c2c3c4s5-c2c5s3) +c1(x4c4s2+x4c2c3s4+x3s2+x2s2)S3s4 s3c4c5+c3s5 -c4s3s5+c3c5 x4s3s40 0 0 1]等式左右两个矩阵内对应元素相等于是就得到如下方程组:1c1(c2c4-c3s2s4)-s1(s2c4+c2c3s4)= c0Nx-s0Nz2s1(c2c4-c3s2s4)+c1(s2c4+c2c3s4)= Ny3s3s4= S0Nx+c0Nz4c1(-s4c2c5-s2c3c4c5+s2s3s5) -s1(-s2s4c5+c2c3c4c5-c2s3s5)= c0Ox-s0Oz5s1(-s4c2c5-s2c3c4c5+s2s3s5) +c1(-s2s4c5+c2c3c4c5-c2s3s5)= Oy6s3c4c5+c3s5= s0Ox+c0Oz7c1(c2s4s5+c3c4s2s5+c5s2s3) -s1(s2s4s5-c2c3c4s5-c2c5s3)=c0Ax-s0Az8s1(c2s4s5+c3c4s2s5+c5s2s3) +c1(s2s4s5-c2c3c4s5-c2c5s3)=Ay9-c4s3s5+c3c5= s0Ax+c0Az10c1(x4c2c4-x4c3s2s4+x3c2+x2c2) -s1(x4c4s2+x4c2c3s4+x3s2+x2s2)+x1c1= c0Px-s0Pz-x011s1(x4c2c4-x4c3s2s4+x3c2+x2c2)+x1s1+c1(x4c4s2+x4c2c3s4+x3s2+x2s2)= Py-y012x4s3s4= s0Px+c0Pz注意:以上12个方程式中c0、c1、c2、c3、c4、c5分别为cosθ0、cosθ1、cosθ2、cosθ3、cosθ4、cosθ5的简写,s0、s1、s2、s3、s4、s5分别为sinθ0、sin θ1、s inθ2、sinθ3、sinθ4、sinθ5的简写。