航摄像片的方位元素_
ch2-单张航摄像片解析

18cmx18cm,23cmx23cm,30cmx30cm
通常承片框上四个边的中点各安置一个机械框标或
在四个角设定四个光学框标来建立像平面坐标。
光学框标
—
机械框标
康 念 坤
框标坐标系
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
—
康 念 坤
量测用摄影机的三个特征
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
康 念 坤
量测用摄影机的三个特征
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
① 量测用摄影机的像距是一个固定值,几乎等于
摄影机物镜的焦距。
② 摄影机像面框架有无框标标志,是作为区分量
—
测用摄影机和非量测用摄影机的重要标志。
康 念 坤
框 标
航摄像片的大小规格:
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
康 念 坤
等比线的构像比例尺等于水平像片上的摄影比例尺f/H ,不 受像片倾斜影响。
§2-2 摄影测量常用坐标系统
根据像片上像点的位置确定相应的地面点的空间位置。需
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
要选择适当的坐标系统来描述像点和地面点,并通过一系列 的坐标变换,建立二者之间的数学关系,从而由像点观测值 求出对应物点的测量坐标。
—
康 念 坤
像片倾斜引起的 像点位移
地形起伏引起的 像点位移
航摄像片与地形图的区别
(1)投影方式的不同:地形图为正射投影,航摄像片为 中心投影。
摄 影 测 量 学 第 二 章 单 张 航 摄 像 片 解 析
(2)航片存在两项误差:像片倾斜引起的像点位移,地形起伏 引起的像点位移。 (3)比例尺的不同:地图有统一比例尺;航片无统一比例尺, 比例尺因点而异。 (4)表示方法的不同:地图为线划图;航片为影像图。 (5)表示内容的不同:地图需要综合取舍;航片所见即所得。 (6)几何上的不同:航摄像片可组成像对立体观察。 摄影测量的主要任务就是把地面按中心投影规律获得 的摄影比例尺像片转换成按图比例尺要求的正射投影地 形图。
航空摄影测量基础知识单选题100道及答案解析

航空摄影测量基础知识单选题100道及答案解析1. 航空摄影测量中,像片倾斜角一般不大于()A. 2°B. 3°C. 4°D. 5°答案:B解析:航空摄影测量中,像片倾斜角一般不大于3°。
2. 航摄像片的内方位元素包括()A. 像主点的坐标和像片的焦距B. 像主点的坐标和摄影机的主距C. 摄影机的主距和像片的焦距D. 像主点的坐标和像片的主距答案:A解析:航摄像片的内方位元素包括像主点的坐标和像片的焦距。
3. 航空摄影测量中,相对定向的目的是()A. 建立模型点在物方空间坐标系中的坐标B. 建立像空间辅助坐标系C. 建立同名光线对对相交的几何模型D. 消除投影差答案:C解析:相对定向的目的是建立同名光线对对相交的几何模型。
4. 以下不是航空摄影测量外业工作任务的是()A. 像片控制点联测B. 像片解译C. 像片调绘D. 补测新增地物答案:B解析:像片解译通常不是航空摄影测量外业的工作任务。
5. 航空摄影测量中,航线弯曲度一般不得超过()A. 1%B. 2%C. 3%D. 4%答案:C解析:航空摄影测量中,航线弯曲度一般不得超过3%。
6. 航空摄影测量中,相邻像片的旁向重叠度一般应为()A. 15% - 30%B. 30% - 50%C. 50% - 65%D. 65% - 75%答案:B解析:相邻像片的旁向重叠度一般应为30% - 50%。
7. 绝对定向元素有()个。
A. 3B. 5C. 7D. 9答案:C解析:绝对定向元素有7 个。
8. 航空摄影测量加密点选点时,相邻区域网间的公共点至少应有()个。
A. 1B. 2C. 3D. 4答案:C解析:相邻区域网间的公共点至少应有3 个。
9. 像片控制点的布设,要求控制点在像片上的位置应()A. 尽量靠近像片边缘B. 尽量均匀分布C. 集中在像片中心D. 任意分布答案:B解析:像片控制点的布设要求控制点在像片上尽量均匀分布。
航空飞行器航空摄影与测量考核试卷

3.像片纠正消除镜头畸变和地球曲率影响,提高像片精度。方法包括几何校正、投影变换和数字高程模型(DEM)校正等。几何校正通过数学模型调整像点位置;投影变换将像片投影到标准坐标系;DEM校正考虑地形起伏影响。
B.侧射摄影
C.竖直摄影
D.鱼眼摄影
5.在航空测量中,下列哪种定位方法精度最高?()
A.单像定位
B.双像定位
C.三像定位
D.光束法平差
6.航空摄影测量中,下列哪种方法用于消除地球曲率影响?()
A.高程校正
B.投影变换
C.像片纠正
D.立体测图
7.在航空摄影中,下列哪个参数与像片重叠度无关?()
A.飞行高度
二、多选题(本题共20小题,每小题1.5分,共30分,在每小题给出的四个选项中,至少有一项是符合题目要求的)
1.以下哪些因素会影响航空摄影像片的清晰度?()
A.飞行速度
B.摄影焦距
C.摄影机的稳定性
D.气象条件
2.航空摄影测量中,哪些方法可以用于确定像片的外方位元素?()
A.单像定位
B.双像定位
C.三像定位
航空飞行器航空摄影与测量考核试卷
考生姓名:__________答题日期:__________得分:__________判卷人:__________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.航空摄影中,下列哪个因素不会影响像片的质量?()
B.选择合适的摄影时间
C.增加控制点数量
摄影测量习题课
1.摄影测量按距离远近可分为(1),(2),(3)及(4)。
2.航摄像片的内方位元素有(5)个,它的作用是(6)。
3.相交直线的中心投影一般是(7),4.(9)叫主核面,在一般情况下,左、右主核面(10)重合的。
5.摄影测量的三个主要阶段?各有什么特点?6.简述航空摄影测量过程?7.航空摄影与航空摄影测量区别?8.什么是合点?怎样确定空间直线的合点?9.什么是中心投影的三点共线?什么是中心投影?10.什么叫立体像对的相对方位元素?它有哪几种确定两像片相对位置的方法?11.像空间坐标系和像空间辅助坐标系有什么关系?12.主核面有几个?垂核面有几个?13.双像解析摄影测量的三种解法?14.什么叫单像空间后方交会?对参加单像空间后方交会的点有什么要求?15.什么叫空间前方交会?请写出空间前方交会公式推导过程。
16.计算地面点坐标、模型点坐标的主要步骤有哪些?16、什么叫单像空间后方交会?计算时需要哪些起始数据?解算哪些未知数?17、什么叫双像空间前方交会?画出双像空间前方交会的计算流程图。
18、写出双像前方交会的计算公式,说明式中各符号的含义。
19、什么是解析相对定向?解算时需要地面控制点吗,为什么?20、写出绝对定向的数学模型,并说明绝对定向计算时需要哪些起始数据,解算哪些未知数?起始数据又如何得到?解算时至少需要几个地面控制点?21、双像解析摄影测量有哪三种方法?写出其中一种方法的步骤及所用到的数学公式。
(公式不用线性化)22、像对立体观察的条件是什么?最难解决的是哪一个?一般用什么方法解决?23、恢复立体像对的相对方位能建立起几何模型吗?这个模型有什么样的特点?24.什么叫绝对定向元素?有哪几个?哪个决定了模型的大小?25.什么是像片重叠?为什么要求相邻像片之间以及航线之间的像片对要有重叠?26.摄影测量中为什么常把像空间坐标系变为像空间辅助坐标系?27为什么外方位角元素有三种不同的选择?28.立体像对双像前方交会的目的是什么?29双像解析摄影测量有哪三种解析方法?各有什么特点?30.量测型摄影机和非量测型摄影机的主要区别?31.已知像片重叠度为60%,旁向重叠度为30%,求像幅18x18cm2和23x23cm2的航片,其航向重叠和旁向重叠长度个为多少?32.单张像片能确定点的空间位置吗?试着从共线条件方程角度来解释。
立体像对的相对方位元素和绝对方位元素

立体像对的方位元素和空间前方交会3.3立体像对的相对方位元素和绝对方位元素△ Z= EZ= Zs2 _ZS1 △K =? - K1其中,△ Xs △ Ys △ Zs为摄影基线B在地面摄影测量坐标系中的三个坐标轴上的投影,称为摄影基线的三个分量,通常记为B X、B Y、B Z,决定了基线的方向和长度。
B V B X B Y2B Z tanT EE Y/ B X sinV B Z/ B所以,B X、B Y、B Z可用B、T、V这三个元素代替。
B为基线长度, 只影响模型比例尺,不影响两像片之间的相对方位。
因此,确定两张像片间相对方位的元素只需5个:T、V、△ © ^3 △ K1. 定义由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点 在物方空间坐标系中坐标的方法,叫做空间前方交会。
2. 建立坐标系在地面建立地面摄测坐标系 D-Xtp Ytp Ztp ,且Xtp 轴与航向基本一致, 而且Xtp Ytp 为水平面;像空间辅助坐标系 S-X Y Z 和S'-X'Y'Z',其轴分别与D-Xt p Yt P Zt P 对应轴平行。
3•已知数据像点坐标a i (x i 、y i 、-f );像空间辅助坐标a i (X i 、Y i 、Z i );像空间辅 助坐标a 2(X 2、丫2、Z 2);像点坐标a 2(x 2、y 2、-f );模型点A 在地面摄测坐标系下的坐标(X A ,Y A ,Z A )。
4、建立公式X i x i X 2 X 2Y i R i y i丫2 R 2 y 2(a )Z ifZ 2fS 2在S i — X i Y i Z i 中的坐标(像空间辅助坐标)由摄影基线 B 的三个坐BXX S2 X Si标分量表示,用外方位元素(直线元素)计算,BY Y S2 Y Si(b )B ZZ S2Z Si因左、右像空间辅助坐标系及坐标系的对应轴相互平行,且摄站点、像 点、地面点三点共线,则由图可得出:上式中,N i 和N 2称为点投影系数。
摄影测量中常用的坐标系统与航摄像片的内外方位元素

新课导入 像点
框标坐标系 关系?
像空间坐标系
S
o
x
y
a
x
关系?
地面辅助坐标系
A
地面点
已知 大地坐标系
如何确定摄影时摄影中心、像片与地面三者之间相关 位置关系的参数?
三、航摄像片的内、外方位元素
方位元素:描述摄影机(含航摄像片)姿态的参数
像点 地面点
框标坐标系 关系?
像空间坐标系 关系?
地面辅助坐标系 已知
垂光线Sn之间的夹角
Y
τ:主垂面与地面
摄影测量坐标系的XY 平面的交线与其Y轴的
N
夹角。
像片旋
角v
X v:主
垂面与像片 面的交线 (主纵线) 与像平面坐 标系的y轴
X 之间的夹角。
主垂面 方向角τ
三、航摄像片的内、外方位元素
方位元素:描述摄影机(含航摄像片)姿态的参数
像点 地面点
框标坐标系 关系?
用途 ✓ 表示像点在像平面上的位置
表示:
✓ xoy
y y'
a
x0 o
x
y0
p
x'
一、像方坐标系
1、像平面坐标系
当像主点与框标连线交点不重合时,须将像框标坐
标系原点平移至像主点。
y
像主点坐标系与框标坐标系的转化: y'
a
x0 o
x
y0
p
x'
一、像方坐标系
2、像空间坐标系s-xyz
y y'
s
a
ox y
像空间坐标系 关系?
地面辅助坐标系 已知
地面测量坐标系
内方位元素
外方位元素
注册测绘师摄影测量题目

摄影测量单项选择1、目前,主流航空摄影机像幅为〔〕。
A.18cm×18cmB.23cm×23cmC.36cm×36cmD.46cm×46cm答案:B2、同一条航线内相邻像片之间影像重叠称为〔〕重叠。
A. 航向B. 旁向C.水平D. 垂直答案:A3、相邻航线相邻像片之间影像重叠称为〔〕重叠。
A. 航向B. 旁向C.水平D. 垂直答案:B4、航摄像片上一线段与地面上相应线段水平距离之比称为〔〕比例尺。
答案:C5、航空摄影属于〔〕投影成像。
答案:D6、一张航摄像片有〔〕个内方位元素。
A.2B.3 C答案:B7、一张航摄像片有〔〕个外方位元素。
A.2B.3 C答案:D8、一张航摄像片有〔〕个方位元素。
A.3B.6 C答案:C9、摄影测量中一个立体像对由〔〕张航片构成。
A. 1B.2 C答案:B10、航片上投影差是由〔〕引起像点位移。
答案:A11、将一个重叠向内立体像对左右像片对调后,观测到是〔〕。
答案:B12、一个立体像对同名像点x坐标之差称为〔〕。
答案:A13、一个立体像对同名像点y坐标之差称为〔〕。
答案:B14、一个像对立体模型绝对定向至少需要〔〕控制点。
答案:D15、解析法相对定向目是解求〔〕元素。
答案:B16、摄影测量中立体像对绝对定向元素有〔〕个。
A. 5B. 12 C答案:C17、摄影测量中立体像对相对定向元素有( )个。
A.5B.12 C答案:A18、数字正射影像英文缩写是( )。
答案:C19、立体像对中同名像点必定位于〔〕上。
答案:C20、数字影像〔〕是全数字化摄影测量核心技术。
答案:A21、数字摄影测量系统采用数字影像相关方法在左、右影像中寻找〔〕。
答案:D22、数字航空影像是一个二维数字矩阵,将像点扫描坐标转换为像平面坐标过程,称为〔〕。
答案:D23、规那么格网数字高程模型是一个二维数字矩阵,矩阵元素表示地面点〔〕。
答案:B24、答案:A25、利用数字高程模型表示复杂地形外表时,最理想数据构造是〔〕。
航摄像片的方位元素
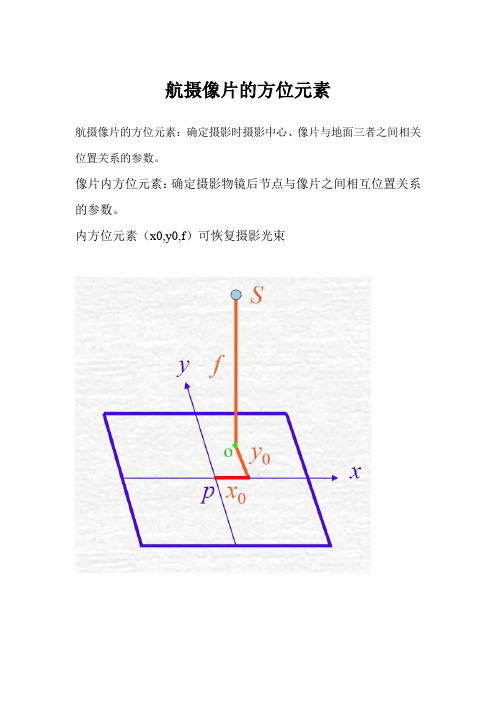
航摄像片的方位元素
航摄像片的方位元素:确定摄影时摄影中心、像片与地面三者之间相关位置关系的参数。
像片内方位元素:确定摄影物镜后节点与像片之间相互位置关系的参数。
内方位元素(x0,y0,f)可恢复摄影光束
像片外方位元素:确定摄影瞬间像片在地面直角坐标系中空间位置和姿态的参数
外方位线元素:描述摄影中心在地面空间直角坐标系中的位置(Xs、Ys、Zs)
外方位角元素:描述像片在摄影瞬间的空间姿态
其中外方位线元素容易理解,就是摄影中心在地面摄影测量坐标系的位置(XYZ)
而外方位角元素有3个角度,其中两个是用于确定摄影光线SO 的位置,即向飞行方向(航向倾角)、向里面(旁向倾角)的角
度,还有一个角度的是用于确定像片的旋角,就是保证像平面直角坐标和像空间直角坐标的XY轴平行。
根据旋转顺序不同,可有3种外方位角元素:
上述提到的角度中,都是以逆时针方向为正角,除去像片旋角Kv、方位角A的值处于0-360度之间,其他的角度都是小角度,一般都小于3度!
以Y为主轴:常用于解析测图仪
以X为主轴:国外用得比较多
以Z为主轴:常用于单向测图、像片修正。
摄影测量学第二章_单张航片解析

一、航空摄影机
较好的光学性能、高度自动化、像移补偿、压平装置
框标:机械框标、光学框标-建立像平面坐标系 机械框标、光学框标- 机械框标 主距:物镜中心至像底片面垂直距离 物镜中心至像底片面垂直距离 像幅:23X23 cm 18X18cm 23X23 cm、18X18cm
f
二、摄影比例尺
航摄像片上的一线段l与地面上相应线段 之比 航摄像片上的一线段 与地面上相应线段L之比。 与地面上相应线段 之比。 航片倾斜、地形起伏时m不为常数 不为常数。 航片倾斜、地形起伏时 不为常数。
摄影测量中,摄影中心、像点及对应的地面点应满足 直线条件。由此得到的方程-共线条件方程。
第六节 共线条件方程
第六节 共线条件方程
第六节 共线条件方程
第六节 共线条件方程
应用: 求像底点坐标 单像空间后方交会和多像空间前方交会 摄影测量中的数字投影基础 航空影像模拟 光束法平差的基本数学模型 利用DEM制作数字正射影像图 利用DEM进行单张像片测图 思考题:已知像片内、外方位元素、像点坐标。 思考题:已知像片内、外方位元素、像点坐标。能否计算得到 地面点坐标? 地面点坐标?
第六节 共线条件方程
像片仿真
Z
z y
S(Xs, Ys, Zs)
x a (x,y)
已知 1、内、外方位元素 、 2、地面点空间坐标 、 3、DEM 、 4、DOM 、
a1 ( X − X s ) + b1 (Y − Ys ) + c1 (Z − Z s ) x =−f a3 ( X − X s ) + b3 (Y − Ys ) + c3 (Z − Z s ) y =−f a2 ( X − X s ) + b2 (Y − Ys ) + c2 (Z − Z s ) a3 ( X − X s ) + b3 (Y − Ys ) + c3 (Z − Z s )
测绘航空摄影试题

测绘航空摄影试题一、单选题1、目前,主流的航空摄影机的像幅为(B )。
A.18cm×18cmB.23cm×23cmC.36cm×36cmD.46cm×46cm2、同一条航线内相邻像片之间的影像重叠称为(A )重叠。
A. 航向B. 旁向C.水平D. 垂直3、相邻航线相邻像片之间的影像重叠称为(B )重叠。
A. 航向B. 旁向C.水平D. 垂直4、航摄像片上一线段与地面上相应线段的水平距离之比称为(C )比例尺。
A.地形图B.测图C.摄影D.制图5、航空摄影属于(D )投影成像。
A.正射B.垂直C.斜距D.中心6、一张航摄像片有(B )个内方位元素。
A.2B.3C. 4D.67、一张航摄像片有(D )个外方位元素。
A.2B.3C. 4D.68、一张航摄像片有(C )个方位元素。
A.3B.6C. 9D.129、摄影测量中一个立体像对由(B )张航片构成。
A. 1B.2C.3D.410、航片上的投影差是由(A )引起的像点位移。
A.地形起伏B.像片倾斜C.摄影姿态D.地球曲率11、将一个重叠向内的立体像对的左右像片对调后,观测到的是(B )。
A.正立体B.负立体C.无立体D.不确定的模型12、下列各项中,关于航摄分区划分的原则叙述错误的是:(A)应为1/4A、分区内的地形高差不得大于三分之一航高B、当地面高差突变,地形特征差别显著时,可以破图幅划分航摄分区C、在地形高差许可且能够确保航线的直线性的情况下,航摄分区的跨度应尽量划大D、分区界线应与图廓线相一致13、当成图比例尺为1:10 000时,应选择的航摄比例尺为:(A)A、1:20 000~1:40 000B 、1:10 000~1:20 000C 、1:25 000~1:60 000D 、1:7000~1:14 00014、对于像控点的布设,下图所示的应是那种情况下的布点方法(黑点表示高程点,圆圈内一点表示平高点)?(D )原则上中心必须布点A 、航线网布点B 、区域网布点,用于加密平面控制点C 、区域网布点,用于加密平高控制点D 、区域网布点,用于地形条件受限时15、下列各项中,不包括于航摄设计书的内容的是:(C )A 、航摄因子计算表B 、航摄材料消耗计算表C 、航摄鉴定表D 、GPS 领航数据表16、下面的公式是高层建筑物密集的大城市进行航摄时间选择的公式(T ?为摄区的地方时),其中h θ表示?(C )12cos 90h T h t ?θθθδ?=--=-A 、摄区当地正午时间B 、太阳时角,单位为度(°)C 、摄影要求的太阳高度角,单位为度(°)D 、摄影日期的太阳赤纬,单位为度(°)17、下列对于航线敷设原则的叙述,错误的是?( D )A 、航线飞行方向一般设计为东西向,特定条件下亦可设计南北向或任意方向飞行B 、位于摄区边缘的首末航线应设计在摄区边界线上或边界线外C 、当相邻航线重叠度不能保证满足要求的情况时,应调整航摄比例尺D 、沿图幅中心线敷设航线时,平行于航摄飞行方向的测区边缘可不用外延一条航线18、下列对于航摄仪的有效使用面积内镜头分辨率的要求,正确的是?(B)A、每毫米内不少于20线对B、每毫米内不少于25线对C、每毫米内不少于30线对D、每毫米内不少于40线对19、下列关于航空摄影时飞行质量的要求,叙述错误的有?(B)A、航向重叠度一般应为60%-65%;个别最大不应大于75%,最小不应小于56%B、像片倾斜角一般不大于3°,个别最大不大于5°C、航摄比例尺越大,像片旋角的允许值就越大,但一般以不超过8°为宜D、航线弯曲度一般不大于3%20、进行1:5000地形图航空摄影时,下列关于飞行质量的叙述错误的是?(A)A、同一条航线上相邻像片的航高差不应大于20 m(30m)B、最大航高与最小航高之差不应大于50 mC、航摄分区内实际航高与设计航高之差不应大设计航高的5%D、1:5000和1:25000地形图航空摄影时,对航高的要求一样。
航空摄影测量题库200题
航空摄影测量题库200题航向重叠度应该在()左右 [单选题] *30%60%(正确答案)10%旁向重叠度应该在()左右 [单选题] *30%(正确答案)60%10%像片倾角一般不大于 [单选题] *5度3度(正确答案)10度航线弯曲度一般在()度以内 [单选题] *3(正确答案)1015航摄像片是地面的() [单选题] *几何投影平行投影中心投影(正确答案)为求定GPS点在某一参考坐标系中的坐标,应与该参考坐标系中的原有控制点联测,联测的点数不得少于()个点。
[单选题] *12(正确答案)3地面上任意一点的正常高为该点沿()的距离。
[单选题] *垂线至似大地水准面(正确答案)法线至似大地水准面垂线至大地水准面法线至大地水准面基于胶片的航测内业数字化生产过程中,内定向的主要目的是实现()的转换。
[单选题] *A.像片坐标到地面坐标B.扫描仪坐标到地面坐标C.像平面坐标到像空间坐标D.扫描仪坐标到像片坐标(正确答案)解析法相对定向中,一个像对所求的相对定向元素共有()个。
[单选题] *45(正确答案)67城区航空摄影时,为减小航摄像片上地物的投影差,应尽量选择()焦距摄影机。
[单选题] *短中等长(正确答案)可变航测法成图的外业主要工作是()和像片测绘。
[单选题] *地形测量像片坐标测量地物高度测量地面控制点坐标(正确答案)GPS辅助航空摄影测量中,机载GPS的主要作用之一是用来测定()的初值。
[单选题] *外方位线元素(正确答案)内定向参数外方位角元素地面控制点坐标就目前的技术水平而言,下列航测数字化生产环节中,自动化水平相对较低的是()。
[单选题] *摄影内定向DOM的生产DLG的生产(正确答案)空中三角测量多源遥感影像数据融合的主要优点是()。
[单选题] *可以自动确定多种传感器影像的外方位元素.可以充分发挥各种传感器影像自身的特点(正确答案)可以提高影像匹配的速度可以自动发现地物的变化规律对航空摄影机进行检校的主要目的之一是为了精确获得摄影机()的值。
摄影测量学 地质大学考试题库及答案

摄影测量学(专升本)单选题1.航向重叠度一般规定为。
(4分)(A) 30%(B) 53%(C) 75% .(D) 60%参考答案:D2.航带的弯曲度要求小于。
(4分)(A) 15%(B) 30%(C) 3% .(D) 6%参考答案:C3.是过航摄机镜头后节点垂直于底片面的一条直线。
(4分)(A)入射光线(B)摄影方向线(C)主光轴(D)铅垂线参考答案:C4.同一航线内各摄影站的航高差不得超过米。
(4分)(A) 50(B) 20(C) 100(D) 30参考答案:A5.确定影像获取瞬间在地面直角坐标系中空间位置和姿态的参数。
(4分)(A)像片的外方位元素(B)像片的内方位元素(C)绝对方位元素(D)相对方位元素参考答案:A6.摄影中心到像片平面的垂直距离称为。
(4分)(A)像距(B)主距(C)物距(D)焦距参考答案:B多选题7.摄影测量按照用途可分为。
(4分)(A)地形摄影测量(B)航空摄影测量(C)地面摄影测量(D)非地形摄影测量参考答案:A,D8.投影方式包括。
(4分)(A)平行投影(B)斜平行投影(C)正射投影(D)中心投影.参考答案:A,D9.航摄像片的内方位元素包括。
(4分)(A)直:(B) 丁。
(C) --(D) /参考答案:A,B,C,D10.表示航摄像片的外方位角元素可以采用系统。
(4分)(A) :(B)、一: (C)"上•(D) :、一参考答案:A,B,C11.航摄像片的像幅有几种规格。
(4分)(A) 18cm*18cm(B) 20cm*20cm(C) 23cm*23cm(D) 30cm*30cm参考答案:A,C,D12.摄影测量常用的坐标系有。
(4分)(A)像平面坐标系(B)像空间坐标系(C)像空间辅助坐标系(D)摄影测量坐标系(E)大地坐标系参考答案:A,B,C,D,E判断题13.请问,摄影测量的主要特点是否是在像片上进行量测和解译而无需接触被摄物体本身?(4分)参考答案:正确14.请问,地形摄影测量的研究对象是否涵盖了工业、建筑、考古、军事、生物、医学等服务领域?(4分)答案:错误15.请问,数字航摄相机中,CCD传感器的作用是否相当于框幅式光学航摄相机中的胶片?(4分)参考答案:正确16.请问,相片倾斜角是否最大不超过6°?(4分)参考答案:错误17.请问,主遁点是否是主纵线和基本方向线的交点?(4分)参考答案:正确18.请问,同一航线上航摄像片的摄影比例尺是否一致?(4分)参考答案:错误填空题19.用光学摄影机获取像片,通过像片来研究被摄物体的形状、大小、位置和相互关系的一门科学技术称为__(1)__。
太原理工大学摄影测量学-第四章影像解析基础3-4
§3. 航摄像片的内、外方位元素
(2)以X轴为主轴的φ’-ω’-κ’转角系统 旁向倾角ω’:主光轴So在YZ平面上的投影SoY与Z轴的夹角。 航向倾角φ’:摄影方向So与其在YZ坐标面上的投影SoY的夹角。 像片旋角κ’:X坐标轴与SoY o组成的平面与像平面的交线和像 平面直角坐标系的x轴之间的夹角。
x0
y0
x'
y
'
A1
x
y
x0
y0
x0 ,y0:原点O在坐标系P-xy中的坐标值, 即坐标原点的平移量。
§4. 像点在不同坐标系中的变换
二、像点的空间坐标变换
取得像点的像平面坐标后,加上z=-f 即可得到像点的像空 间直角坐标。 像点的空间坐标变换,通常是将像点的像空间直角坐标(x, y, -f)变换为像空间辅助坐标(X, Y, Z)。 是同一个像点在原点相同的两个空间直角坐标系中的坐标 变换。
cos κ
0
sin 0 cos 0 sin ω cos ω 0
0
1
a1 a2 a3
b1
b2
b3
c1 c2 c3
cos Xˆx
cosYˆx
cos
Zˆx
cos Xˆy cos Yˆy cos Zˆy
cos Xˆz
cosYˆz
cos
Zˆz
§4. 像点在不同坐标系中的变换
二、像点的空间坐标变换
Y
0
1
0
Y
R
Y
Z sin 0 cos Z
Z
§4. 像点在不同坐标系中的变换
二、像点的空间坐标变换 2:当坐标系S-Xφ Y(φ) Zφ绕副轴Xφ轴旋转ω角,得到坐标系SXφ(ω) Y(φ)ω Zφω ,此时Xφ轴坐标不变,两种坐标系的变换关系 为:
摄影测量知识点
摄影测量知识点摄影测量知识点⼀、航空摄影测量的定义以分析、判读和量测航摄像⽚为基础,确定所摄地⾯⽬标的性质和空间位置的学科称之。
⼆、成图过程1.航空摄影:2.航测外业:(1)控制测量:测定少量控制点,⽤于满⾜内业电算加密。
(2)像⽚调绘3.航测内业(1)航测内业加密。
(2)航测内业测图三、航摄资料航摄资料是指航摄像⽚以及在航摄过程中所取得的其他数据像⽚、主距、摄影航⾼,像⽚重叠度,像⽚倾⾓,航线弯曲度,像⽚⽐例尺、航摄鉴定表、像⽚索引图等1.影象清晰、⾊调⼀致、反差适中、灰雾⼩2.不应有云影、阴影和雪影的影响。
3.不应有斑点、擦痕、折伤、发黄及药膜损伤等现象。
4.摄影标志清晰可辨四、摄影标志像⽚⼤⼩和摄影标志1.像幅⼤⼩:18*18cm,23*23cm,30*30cm等。
2.摄影标志:⽔准器:记录像⽚的倾斜度压平线:感光胶⽚弯曲度产⽣的像⽚变形时表:记录像⽚的拍摄时刻框标:对称的两个框标的连线的交点为像⽚的中⼼点像⽚编号:记录航摄区的位置、摄影时间、图幅、航线顺序等(三)航测成图对航摄像⽚现势性的要求现势性:航摄像⽚的现势性是指进⼊测区作业时,实地情况与摄影时⽐较发⽣变化的程度。
成图截⽌时间现势性与摄影时间到作业时间间隔的关系现势性与测图地区的关系(四)航测成图对飞⾏质量的要求1.对像⽚倾⾓的要求航空摄影时尽量使倾斜⾓α⼩,⼀般不超过2°。
2.对航摄⽐例尺的要求(1)按成图的精度要求选择航摄⽐例尺(2)根据图⾯综合取舍的需要选择航摄⽐例尺(3)按像⽚判读的要求选择航摄⽐例尺(4)像⽚⽐例尺的测定a.视距法:在距像主点1cm范围内的明显地物点上设站,选4个尽量同⾼且与测站连线近似正交的明显地物点,在像⽚上量取各长度,在实地⽤视距法测出相应长度,则可求出像⽚平均⽐例尺。
也可在像⽚上任意点设站,选择与测站⼤致同⾼,且与测站连线近似正交的两个明显地物点,在像⽚上量取其长度,在实地⽤视距法测出对应长度,则该测站范围内的像⽚平均⽐例尺可通过计算求出。
立体像对的相对方位元素和绝对方位元素-四川建筑职业技术学院
绝对定向元素:,X0,Y0,Z0,,,
绝对定向元素的个数:一个立体像对有12个外方位元素,像对相对定向已求得的5个定向元素,是两张像片间的相对位置关系,若确定像对在地面空间坐标系中的绝对位置和方位,还要解求7个绝对定向元素,包括旋转、平移和缩放。即将立体模型进行空间相似变换。
在以左摄影中心为原点、左主核面为XZ平面、摄影基线为X轴的右手空间直角坐标系中,左右像片的相对方位元素。
在恢复了立体像对的两张像片的相对方位之后,相应光线必在其核面内成对相交,这些交点的总和形成了一个与实地相似的模型。模型的比例尺任意,方位任意。
在恢复立体像对的两张像片的相对方位的基础上,用来确定立体像对在地面摄影测量坐标系中的正确方位和比例尺所需要的参数,叫做立体像对的绝对方位元素。
1.定义
由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点在物方空间坐标系中坐标的方法,叫做空间前方交会。
2.建立坐标系
在地面建立地面摄测坐标系D-Xtp Ytp Ztp,且Xtp轴与航向基本一致,而且Xtp Ytp为水平面;像空间辅助坐标系S-X Y Z和S'-X'Y'Z',其轴分别与D-XtPYtPZtP对应轴平行。
3.已知数据
像点坐标a1(x1、y1、-f);像空间辅助坐标a1(X1、Y1、Z1);像空间辅助坐标a2(X2、Y2、Z2);像点坐标a2(x2、y2、-f);模型点A在地面摄测坐标系下的坐标(XA,YA,ZA)。
4、建立公式
S2在S1-X1Y1Z1中的坐标(像空间辅助坐标),由摄影基线B的三个坐标分量表示,用外方位元素(直线元素)计算,
因左、右像空间辅助坐标ห้องสมุดไป่ตู้及坐标系的对应轴相互平行,且摄站点、像点、地面点三点共线,则由图可得出: