理论力学-点的运动学
理论力学(5.6)--点的运动学-思考题
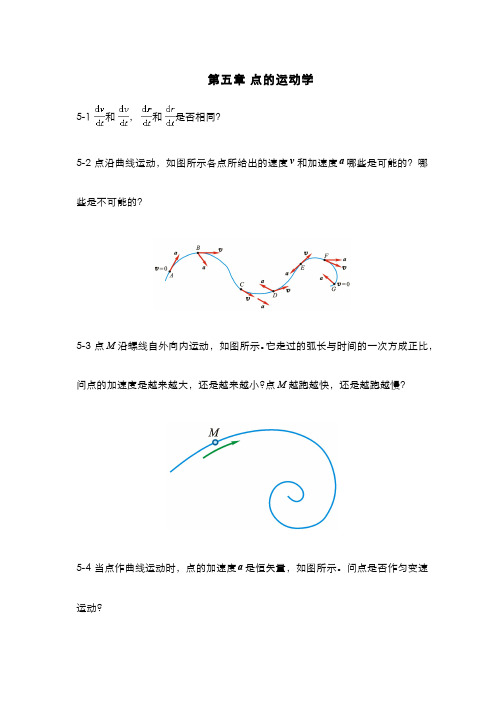
第五章 点的运动学5-1和 , 和 是否相同?5-2点沿曲线运动,如图所示各点所给出的速度v和加速度a哪些是可能的?哪些是不可能的?5-3点M 沿螺线自外向内运动,如图所示。
它走过的弧长与时间的一次方成正比,问点的加速度是越来越大,还是越来越小?点M越跑越快,还是越跑越慢?5-4当点作曲线运动时,点的加速度a是恒矢量,如图所示。
问点是否作匀变速运动?5-5 作曲线运动的两个动点,初速度相同、运动轨迹相同、运动中两点的法向加速度也相同。
判断下述说法是否正确:(1)任一瞬时两动点的切向加速度必相同;(2)任一瞬时两动点的速度必相同;(3)两动点的运动方程必相同。
5-6 动点在平面内运动,已知其运动轨迹)(x f y 及其速度在x 轴方向的分量。
判断下述说法是否正确:(1)动点的速度可完全确定;(2)动点的加速度在x 轴方向的分量可完全确定;(3)当速度在x 轴方向的分量不为零时,一定能确定动点的速度、切向加速度、法向加速度及全加速度。
5-7 下述各种情况,动点的全加速度,切向加速度和法向加速度三个矢量之间有何关系?(1)点沿曲线作匀速运动;(2)点沿曲线运动,在该瞬时其速度为零;(3)点沿直线作变速运动;(4)点沿曲线作变速运动。
5-8 点作曲线运动时,下述说法是否正确:(1)若切向加速度为正,则点作加速运动;(2)若切向加速度与速度的符号相同,则点作加速运动;(3)若切向加速度为零,则速度为常矢量。
5-9 在极坐标系中,ρρ =v ,ρϕϕ =v 分别代表在极径方向与极径垂直方向(极角ϕ的方向)的速度。
但为什么沿这两个方向的加速度为2ϕρρρ -=a ϕρϕρϕ 2+=a 试分析ρa 中2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因和它们的几何意义。
理论力学(第7版)第五章 点的运动学

运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
05 点的运动学 理论力学

南通大学建筑工程学院 力学教研室 金江
运动学
物体运动规律比平衡规律复杂很多,采用运动 学和动力学来进行研究。
运动学是从几何的观点来研究物体的机械运动,不 考虑运动原因
两种模型:点和刚体 学习运动学的目的: 为学习动力学提供必要的基础知识 工程实际中独立的应用价值
运动学 第五章 点的运动学
τ 2 τ sin 2
5-3 自然法
Δ
τ
M
s
Δφ
M'
Δτ
τ ''
τ'
d lim s 0 s ds 1
0
τ
s 0
τ 1
∆τ与 τ垂直
运动学
dτ τ 1 lim lim n n s 0 s 0 ds s s
dr dx dy dz v i j k dt dt dt dt
运动学
v vx i v y j vz k
dx vx x dt dy vy y dt dz vz z dt
5-2 直角坐标法 速度大小
dx dy dz 2 2 2 v vx vy vz dt dt dt
面 法平
b
密切 面
M1
M
n
线 主法
τ1
τ τ 1'
切线
主法线——法平面与密切面的交线,单位方向矢量n, 指向曲线内凹一侧
副法线——过点 M且垂直于切线及主法线的直线
b τ n
运动轨 迹
运动学
点运动时,在轨迹曲线 上位置变化,其自然轴 系的方位也改变 曲线运动,轨迹的曲率或 曲率半径是重要的参数, 表示曲线的弯曲程度
理论力学第5章 点的一般运动与刚体的基本运动

基础部分——运动学第5 章点的一般运动与刚体的基本运动一、运动学的研究对象及任务点刚体zz几何性质z合成分解例1例2例3例4例5例6二、学习运动学的目的三、运动学的分析方法矢量工具数值求解工具四、具体内容第5章点的一般运动与刚体的基本运动点的运动的矢量法点的运动的直角坐标法点的运动的弧坐标法一、运动方程二、轨迹三、点的速度O)(t r )(t t Δ+r vMM ′位矢四、点的加速度点的运动的矢量法一、运动方程点的运动的直角坐标法O rMxy z)(zy,x,xyz二、轨迹方程三、点的速度四、点的加速度AB点的运动的弧坐标法运动轨迹原点O 一、运动方程sMO)(−)(+正方向弧坐标s二、自然轴系主法线n 切线τ,指副法线b思考:共同点不同点)(t r M O三、点的速度⋅lim ⋅st s d d d d r⋅τ⋅=v tsv d d =)(t t Δ+r vM ′sΔO)(−)(+r Δτ四、点的加速度速度大小随时间的变化率方向ττa 22t d d d d tst v ==22t d d d d tst v a ==z切向tas t ΔΔ⋅→Δτ0lim⋅速度方向随时间的变化率z法向n a sΔΔτs ΔΔϕsd d ϕ→方向?n2n2taa +全t 讨论:加速减速[例5-1]纯滚动解:(1)运动方程运动方程=x =y (2)速度22yxv v +t ωcos 22−(3)切向、法向加速度思考:如何求速度投影加速度投影全加速度22a a yx +法向加速度2t2aa −曲率半径(4)运动方程(弧坐标)如何取弧坐标的原点?讨论:Array纯滚动速度为零加速度不为零5-4-1 平行移动(平移)任一直线z形状相同z速度相同z加速度相同5-4-2 定轴转动=矢量表示:=右手规则滑动矢量αωαkz线速度v(弧坐标法)Rv ω=Rna ta αta 方向?z加速度aRa α=t Ra 2n ω=2n2t aa +42ωα+t a α思考:过轴的任一条直线上θαθrωv ×=ααt a rαa ×=t na vωa ×=nr ωr×=td d αααx ′y ′z ′1O i ′j ′k ′rωv ×=[例5-2]解:r ω=+d d r tω−=avtr R +=22ππ[思考题]j i i k ⎜+′⎟⎜′⋅+′⎟′⋅提示:5-5-1 注意区别几组公式5-5-2 描述点的运动的其它方法点的一般运动与刚体基本运动点的一般运动刚体基本运动矢量法直角坐标法弧坐标法其它方法平移定轴转动5-5-3 本章知识结构框图补充:轮系的传动比一、齿轮传动z速度z 切向加速度外啮合内啮合=两齿轮之传动比:21=1 2112R R i ==ωω2112ωω=i 22211±=±=±=正号內啮合负号外啮合11±=外啮合转向推广:二、带轮(链轮)传动二、带轮(链轮)传动z z 皮带与带轮间无相对滑动。
理论力学 第一章 点的运动学
已知速度的投影求速度
大小
v v v v
2 x 2 y
2 z
方向由方向余弦确定
cosv , i v x v cosv , j v y v cosv , k v z v
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§ 1.1点的运动矢量分析方法
加
速
度
t 瞬时: 速度 v(t) t+ t 瞬时:速度 v(t + t ) 或v
t 时间间隔内速度的改变量
v ( t ) = v ( t + t ) - v( t )
点在 t 瞬时的加速度
§ 1.2 点的运动的直角坐标法
加速度
a ax i a y j az k
dv x d 2 x ax 2 dt dt dv y d 2 y ay 2 dt dt dv z d 2 z az 2 dt dt
dv y dv x dv z d2 y d2x d2z a i j k 2 i 2 j 2 k dt dt dt dt dt dt
方 cosa, i a x a, 向 cosa, j a y a, 余 弦 cosa, k a z a
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§1.3 点的运动的自然坐标法
在点的运动轨迹已知的情况下,可建立弧
坐标和自然轴系来描述该点的运动,这种方
点的切线所组成的 平面,称为P点的密 切面。
P P
lim a1 a
理论力学第5章(点的运动)
(2) 运动学: 研究点与刚体运动的几何性质。
包括位移、轨迹、速度、加速度。 (与力无关、也是变形体运动基础)
A B
F
C
B
刚体运动
C
变形(包含刚体位移和相对位移)
(3) 动力学: 研究物体所受力与运动间的关系。
包括质点系、刚体,变形体的动力效应。
第五章 点的运动学
§5-1 运动学的基本概念
速度
已知: OC AC BC l , MC a , t。 求:运动方程、轨迹、速度和加速度。
x l a cost ax v x 2 a y vy y l a sin t
2
加速度
a a a
F ( x, y) 0
二、点的速度v
又
r = xi + yj + zk
式中 v x 所以得
dr dx dy dz v i j k dt dt dt dt v = vx i + vy j + vz k
、v y
、v z
vx
dx dt
v
表明:“动点的速度在坐标轴上的投影,等于动点对应的位置 坐标对时间 t 的一阶导数”。 则速度的大小和方向余弦为
弧坐标的运动方程sf切向加速度表示速度大小的变化三点的加速度法向加速度表示速度方向的变化匀速运动v常数常数常数匀变速直线运动匀速圆周运动匀速直线运动或静止直线运动匀速运动圆周运动匀速运动直线运动匀速曲线运动匀变速曲线运动点作曲线运动画出下列情况下点的加速度方向
(1) 静力学: 研究物体所受力系的简化、平衡规律及其应用。
△r称为在△t时间内动点M的位移。
间间隔△t内的平均速度。以 v*表示。则: Δr v Δt 平均速度表示动点在△t内平均运动的快慢和运动方向。
理论力学知识点总结

理论力学知识点总结理论力学是一门研究物体机械运动一般规律的学科,它是许多工程技术领域的基础。
以下是对理论力学一些重要知识点的总结。
一、静力学静力学主要研究物体在力系作用下的平衡问题。
1、力的基本概念力是物体之间的相互作用,具有大小、方向和作用点三个要素。
力的表示方法包括矢量表示和解析表示。
2、约束与约束力约束是限制物体运动的条件,约束力则是约束对物体的作用力。
常见的约束类型有柔索约束、光滑接触面约束、光滑圆柱铰链约束等,每种约束对应的约束力具有特定的方向和特点。
3、受力分析对物体进行受力分析是解决静力学问题的关键步骤。
要明确研究对象,画出其隔离体,逐个分析作用在物体上的力,包括主动力和约束力,并画出受力图。
4、力系的简化力系可以通过平移和合成等方法进行简化,得到一个合力或合力偶。
力的平移定理指出,力可以平移到另一点,但必须附加一个力偶。
5、平面力系的平衡方程平面任意力系的平衡方程有三个:∑Fx = 0,∑Fy = 0,∑Mo(F) =0。
对于平面汇交力系和平面力偶系,平衡方程分别有所简化。
6、空间力系的平衡方程空间力系的平衡方程数量增多,需要考虑三个方向的力平衡和三个方向的力矩平衡。
二、运动学运动学研究物体的运动而不考虑引起运动的力。
1、点的运动学描述点的运动可以使用矢量法、直角坐标法和自然法。
在自然法中,引入了弧坐标、切向加速度和法向加速度的概念。
2、刚体的基本运动刚体的基本运动包括平动和定轴转动。
平动时,刚体上各点的运动轨迹相同、速度和加速度相同;定轴转动时,刚体上各点的角速度和角加速度相同。
3、点的合成运动点的合成运动是指一个动点相对于两个不同参考系的运动。
通过选取合适的动点、动系和定系,运用速度合成定理和加速度合成定理来求解问题。
4、刚体的平面运动刚体平面运动可以分解为随基点的平动和绕基点的转动。
平面运动刚体上各点的速度可以用基点法、速度投影定理和瞬心法求解,加速度则可以用基点法求解。
三、动力学动力学研究物体的运动与作用力之间的关系。
理论力学-点的运动学

7
三. 点的加速度
a dv dvx i dvy j dvz k dt dt dt dt
d2 x i
dt2
d2 y dt2
j
d2 z k
dt2
axi
ay
j
azk
a ax2 ay2 az2
cos(a, i
)
ax
,
a
[注] 这里的 x、y、z 都是时间单位连续函数。
x f1(t)
11
加速度的大小为
a
a
2 x
a
2 y
2
(l a)2 cos2 t (l a)2 sin2 t
2 l2 a2 2al cos 2t
加速度的方向余弦为
cos(a,i) ax a
cos(a,j) ay a
(l a)cost l2 a2 2al cos 2t
(l a)sint l2 a2 2al cos 2t
dt dt
dt
dt dt2
dt
① 切向加速度 a
——表示速度大小的变化
a
dv τ dt
d2 dt
s
2
τ
② 法向加速度 an ——表示速度方向的变化
an
vdτ dt
v lim Δ τ Δt0 Δ t
v lim (Δ τ Δt0 Δ s
Δ s) Δt
v2 lim Δ τ Δt0 Δ s
(lim Δ s d s v) Δt0 Δ t d t
1
即an
v2 n,
a a2 an2 ,
a
a arctg
2
an |a | an
dv dt
τ
v2
n
16
理论力学-点的运动学案例

l2 a2 2al cos 2t
cos(v, i ) vx
(l a) sin t
v
l 2 a2 2al cos 2t
cos(v, j ) vy
(l a) cost
2 l 2 a2 2al cos 2t
cos(a, i ) ax
(l a) cost
a
l 2 a2 2al cos 2t
cos(a, j ) ay
(l a) sin t
a
l 2 a2 2al cos 2t
例5-2
已知:正弦机构如图所示。曲柄OM长为r,绕O轴匀速转动,
B点的速度和加速度
vB xB r cost
aB xB r2 sin t 2xB
周期运动 x(t T ) xt
f 1 频率 T
例5-3 已知:如图所示,当液压减振器工作时,它的活塞在套
筒内作直线往复运动。设活塞的加速度 a kv
( v为活塞的速度, 为k 比例常数),初速度为 。v0
第五章 点的运动学
例 5-1
已知:椭圆规的曲柄OC 可绕定轴O 转动,其端点C 与规尺 AB 的中点以铰链相连接,而规尺A,B 两端分别在相互垂
直的滑槽中运动, OC AC BC l, MC a, ωt
求:① M 点的运动方程;
② 轨迹; ③ 速度; ④ 加速度。
解: 点M作曲线运动,取坐标系Oxy如图所示。 运动方程
求:活塞的运动规律。
解: 活塞作直线运动,取坐标轴Ox如图所示
由 a dv kv dt
得
v dv k
理论力学—点的运动学
k
a axi ay j azk
1.2 直角坐标法
ax
dvx dt
d2x dt 2
,
ay
dvy dt
d2y dt 2
, az
dvz dt
d2z dt 2
⒉ 大小和方向
大小
a
方向
a2x a2y a2z
d2x dt 2
2
d2y dt 2
2
d2z dt 2
2
cos(ai)
ax
, cos(aj)
⒈ 平均速度
v r t
⒉ t 时刻的速度
v
lim
r
dr
•
r
t0 t dt
M´ M
三.加速度
速度矢端 曲线---速度端图
1.1 矢量法
⒈ 平均加速度 a* v
a
t
⒉ t 时刻的加速度
v
v
a
lim
v
dv
d
2r
••
r
v’
a’
t0 t dt dt 2
1.2 直角坐标法
一.运动方程及轨迹方程
⒈ 运动方程 ⒉ 轨迹方程
⑷ 判断下列运动是否可 能出现,若能出现判断是什么运动?
(加速运动)
(不可能)
(匀速曲线运动) (不可能或改作 直线加速运动)
(不可能)
(减速曲线运动)
(不可能或改作 直线减速运动)
⑸ 证明
d
dt
是沿着主法线方向,即
d
dt
。
证明:
1
d( )
dt
0
d
dt
d
dt
0
2 ddt 0
理论力学 第七章 点的运动学
2
2 当t 0时,S 0,sin 2 2
2sin
| | 1于是 2
2sin sin d 1 2 2 lபைடு நூலகம்m | | lim lim ( ) S S dS t 0 S t 0 t 0
§7–5 自然坐标轴系
§7–6 速度与加速的自然坐标表示法
§7.1 运动学的基本概念
一. 运动学:运动学是从几何的角度研究物体运动的科学。 (即只研究物体运动的几何性质,不涉及改变运动的原因) 二.参考系:参考系就是固定在参考体上的坐标系。
如:静参考系(定系)就是固定在地球上或相对地球静止的物
体上的坐标系。
r 得 cos 1 ( ) 2 sin 2 l
r 2 2 于是B的运动方程为 x r cos l 1 ( ) sin l
r 2 于是B的运动方程为 x r cos l 1 ( ) sin 2 l
为使计算方便,令
r 2 2 1 r 2 2 cos 1 ( ) sin 1 ( ) sin l 2 l 1 r 2 1 r 2 1 ( ) ( ) cos 2 4 l 4 l
x = x(t) 点的运动方程为: y = y(t) z = z(t)
轨迹为F(x,y)=0
P
k j iO
r
a
y
x
三 矢径法 选取空间选一点O为原点,动 点的位置由矢径r表示 z
矢端曲线
P
P´ P
y
r r (t )
r r´ r
O
为点的矢径运动方程,且有
r xi y j z k
弧O1M R 2t
运动学公式汇总

第1 页/共 3 页理论力学——点的运动学重点公式汇总张工培训:湖南陆工(1)矢量法运动方程: 速度:加速度: (2)直角坐标法运动方程:重点:按照上式消去时光t ,即可得动点M 的轨迹方程。
速度:加速度:)(t r r=dt r d v =22dt r d dt v d a ==)()(1t f t x x ==)()(2t f t y y ==)()(3t f t z z ==dtdxv x =dtdy v y =dtdz v z =222z y x v v v v ++=22dt x d dt dv a x x ==22dt y d dt dv a y y ==22dt z d dt dv a z z ==(3)天然法运动方程: 速度:切向加速度: 法向加速度: 全加速度: 2 刚体的容易运动(1)刚体的平移(特征就记住电梯(直梯)的运动逻辑)结论:当刚体平行移动时,其上各点的轨迹形状相同;在每一瞬时,各点的速度相同,加速度也相同。
因此,研究刚体的平移,可以归结为研究刚体内任一点的运动,即点的运动知识题。
(2)刚体的定轴转动(特征就记住门转动时的运动逻辑)运动方程: 角速度:角加速度: 速度: 切向加速度:222zy x a a a a ++=)(t f s =•==s dt ds v 22dt s d dt dv a ==τ22)(1dtds v a nρρ==22na a a +=τ)(t f =ϕdt d ϕω=22dt d dt d ϕωε==ωϕR dtd R dt ds v ===2ετR dtdv a ==第 3 页/共 3 页法向加速度: 全加速度: 注:定轴转动的刚体,任一瞬时各点的角速度和角加速度均相同。
欲知注册工程师考试(公共基础)更多更专业的学习内容,请担心“张工注册工程师基础类——zhanggongjichu 。
22ωρR v a n==4222ωετ+=+=R a a a n。
理论力学-点的运动学

速度和加速度的矢量表示
04
CHAPTER
点的运动轨迹和运动参数
通过已知的初始位置和速度矢量,利用矢量合成法则确定点的运动轨迹。
直角坐标系
极坐标系
参数方程
利用极坐标表示点的位置,通过已知的初始位置和速度矢量,确定点的运动轨迹。
通过设定参数表示点的位置,根据初始条件和运动规律,确定参数方程,从而确定点的运动轨迹。
加速度与轨迹的关系
根据点的加速度矢量,可以判断点加速或减速的情况,进一步推断出其运动轨迹的变化趋势。
位移与轨迹的关系
根据点的位移矢量,可以确定点在平面或空间中的运动轨迹。
运动参数与轨迹的关系
05
CHAPTER
点的运动学应用
刚体的平动是指刚体在空间中的移动,其上任意两点之间的距离保持不变。
总结词
刚体的平动是刚体运动的一种基本形式,它描述了刚体在空间中的移动。在这种运动中,刚体的所有点都以相同的速度和方向移动,因此刚体上任意两点之间的距离保持不变。平动不会改变刚体的形状和大小。
点的速度和加速度
总结词
速度是描述物体运动快慢的物理量,其大小等于物体在单位时间内通过的位移。
详细描述
速度的大小可以用矢量表示,其大小等于物体在单位时间内通过的位移量,方向与物体运动方向相同。在直角坐标系中,速度矢量可以表示为位置矢量对时间的一阶导数。
速度的定义与计算
总结词
加速度是描述物体速度变化快慢的物理量,其大小等于物体在单位时间内速度的变化量。
详细描述
加速度的大小可以用矢量表示,其大小等于物体在单位时间内速度的变化量,方向与物体速度变化方向相同。在直角坐标系中,加速度矢量可以表示为速度矢量对时间的一阶导数。
清华大学理论力学课件-李俊峰-1-点的运动学

A l
sin )i (b cos ) j v (a
abl
( sin i cos j ) v l r l (cos i sin j )
r
O
M
l
B
x
vr 0
M点的速度垂直于其矢径!
2017/10/29 9
第2节 直角坐标描述法
d r lτ vA v lτ lv n dt
q v v
A
lτ
y
vA
( qτ ln)v
v
rv
O
27
q
M
x
r n
vA
2017/10/29
第4节 极坐标描述法
点P沿着平面曲线运动,其在任意时刻的位 Nhomakorabea可以用极坐标表示为:
(t ), (t )
P
矢量端图
r (t )
O
运动方程 位 移 速 度
r r (t )
r r (t t ) r (t ) v lim r dr r t 0 t dt 2 v d v d r a lim 2 r t 0 t dt dt
4
加速度
2017/10/29
当M点与地面接触时,即 2kπ
v0
— M点在该瞬时速度为零! 为什么?
当M点位于最高点时,即 (2k 1)π
i v 2 R
2017/10/29 15
第2节 直角坐标描述法
任意边缘点速度讨论
2
(1 cos ) i ( R sin ) j v R
M
理论力学课件 12.4 自然法

4、自然法描述门板上一点的运动运动轨迹已知自然法()s f t =弧坐标 副法线单位矢量b nτ=⨯τ切向单位矢量n主法线单位矢量 自然轴系自然法:利用点的运动轨迹建立弧坐标和自然轴系,利用它们 描述和分析点的运动的方法。
运动方程提问:自然轴系的原点是什么?自然坐标轴的几何性质速度t s ts s r s t s r t r t r v t t t d d d d lim lim lim 000=∆∆∆∆=∆⋅∆∆⋅∆=∆∆==→∆→∆→∆ τts v d d =方向沿切线方向0d d >t s 沿轨迹正向 0d d <ts 沿轨迹负向自然法?d d d d d d v v a vt t tττ==+加速度τts v d d =表示速度大小的变化,沿轨迹切线方向--切向加速度tsss s t t t t t t ∆∆∆∆=∆∆∆∆=∆∆=→∆→∆→∆ττττlim lim lim 000d d ρϕϕτ1212lim lim lim 000=∆∆=∆∆⋅=∆∆→∆→∆→∆ss s s s s 方向沿主法线方向n v t vρτ2d d =表示速度方向的变化,沿主法线方向--法向加速度曲线匀变速运动n2t 2aa a +=曲线匀速运动 常数 tv s s v v a 000t ,,0+====常数 2t 00t 0t 21,,ta t v s s t a v v a ++=+==nt a a a +=nttan a a =θ已知:半径为r 的轮子沿直线轨道无滑动地滚动(称为纯滚动),设轮子转角为常值),如图所示。
求用直角坐标和弧坐标表示的轮缘上任一点M 的运动方程,并求该点的速度、切向加速度及法向加速度。
(t ϕωω=例1自然法M 点作曲线运动,取直角坐标系如图所示。
OC MC r r tϕω===由纯滚动条件)sin (sin 1t t r M O OC x ωωϕ-=-=()t r M O C O y ωϕcos 1cos 11-=-=从而解: 自然法()1cos ,sin x y v x r t v y r tωωωω==-==)202sin2)cos 1(222πωωωωω≤≤=-=+=t tr t r v v v yx(22sin ,cos x y a x r t a y r tωωωω====222ωr a a a yx =+=0d 2sind 4(1cos)(02π)22t ttts v t r t r t ωωωω===-≤≤⎰⎰又点M 的切向加速度为2cos2t tr v a ωω== 2sin22t 2n tr a a a ωω=-=自然法。
理论力学第6章-点的运动
t0 t S j
当t→0时,t 与t′的夹角趋近于直角,即t 趋近
于轨迹在点M的法线,指向曲率中心。若记法线法线的
单位矢量为n,规定它指向曲率中心,则有
密切面:
dt v n dt
副法线
b
M
t
T
切线
n
过点M作 MT 的平行线 MT1 ,
MT和MT1可以确定一个平面。当点 无限趋近点M时,则此平面趋近某
4
49sin2 wt cos2 wt
O
加速度在x轴,y轴上的投影
j
yC
xC
C x
B
ax
=
dvx dt
7Lw2
4
cos wt
w 2 xC
C点的加速度的大小
ay
=
dvy dt
Lw2
4
sin wt
w2 yC
a ax2 ay2 w2
加速度的方向余弦
cos(a, i) ax xC ar
xC2 yC2 w2r
例6-6 曲柄OA绕O轴逆时针方向转动。其转过j角与时间t
的关系为
j
t
4
,若OA=10cm,OO1 =10cm,O1B=24cm,试求
B点运动方程、速度和加速度。
解:建立弧坐标
运动方程 速度 加速度
S O1B 12j 3πt
v dS 3π 9.42 cm/s dt d2S
at dt2 0
v vxi vy j vzk
速度v在三个轴上的投影
vx
=
dx dt
x(t)
vy
=
dy dt
y(t)
vz
=
dz dt
z(t)
理论力学重难点及相应题解

理论力学重难点及相应题解(总11页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除运动学部分:一、点的运动学重点难点分析1.重点:点的运动的基本概念(速度与加速度,切向加速度和法向加速度的物理意义等);选择坐标系,建立运动方程,求速度、加速度。
求点的运动轨迹。
2.难点:运动方程的建立。
解题指导:1.第一类问题(求导):建立运动方程然后求导。
若已知点的运动轨迹,且方程易于写出时,一般用自然法,否则用直角坐标法。
根据点的运动性质选取相应的坐标系,对于自然法要确定坐标原点和正向。
不管用哪种方法,注意将点置于一般位置,而不能置于特殊位置。
根据运动条件和几何关系把点的坐标表示为与时间有关的几何参数的函数,即可得点的运动方程。
2.第二类问题(积分):由加速度和初始条件求运动方程,即积分并确定积分常数。
二、刚体的简单运动重点难点分析:1.重点:刚体平移、定轴转动基本概念;刚体运动方程,刚体上任一点的速度和加速度。
2.难点:曲线平移。
解题指导:首先正确判断刚体运动的性质。
其后的分析与点的运动分析一样分两类问题进行。
建立刚体运动方程时,应将刚体置于一般位置。
三、点的合成运动(重要)重点难点分析:1.重点:动点和动系的选择;三种运动的分析。
速度合成与加速度合成定理的运用。
2.难点:动点和动系的选择。
解题指导:1.动点的选择、动系的确定和三种运动的分析常常是同时进行的,不可能按顺序完全分开。
2.常见的运动学问题中动点和动系的选择大致可分以下五类:(1)两个(或多个)不坟大小的物体独立运动,(如飞机、海上的船舶等)对该类问题,可根据情况任选一个物体为动点,而将动系建立在另一个物体上。
由于不考虑物体的大小,因此动系(刚体)与物体(点)只在一个点上连接,可视为铰接,建立的是平移动坐标系。
(2)一个小物体(点)相对一个大物体(刚体)运动,此时选小物体为动点,动系建立在大物体上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
an
v
dt
dt
v lim t
t0 t
v lim ( t S )
t0 S t
v2 lim t
t0 S
( lim
t0
S t
dS dt
v)
由图可知:
| t ||t 't | 2 |t | sin 2sin
2
2
当t 0时,S 0, sin ,
22
|t | 1于是 t
lim | t | lim d 1 t0 S t0 S dS
何直线都⊥ t ,都是
曲线的法线。
⑴ 主法线:密切面与法面的交线称为曲线在 M 点的主法 线。(主法线只有一条)
⑵ 副法线:法面内与主法线垂直的法线称为副法线。
n
⒋ 自然轴系
t — 主法线的单位矢量, b — 副法线的单位矢量, — t 切线的单位矢量。则 n 、b 、 三个矢量的轴线构成了自
然轴系。
⑸ 瞬时、时间间隔 ()t ( )t t2 t1
⑹ 运动分类 1)点的运动 2)刚体的运动
本章重点、难点
重点
点的曲线运动的直角坐标法,点的运动方程, 点的速度和加速度在直角坐标轴上的投影。
点的曲线运动的自然坐标法,( 平面曲线运 动为主),点沿已知轨迹的运动方程,点的切向 加速度与法向加速度。
⑵ 方向
cos(v i
)
vx
v
cos( v j
)
v
y
v
cos( v k
)
vz
v
三. 加速度
⒈ 投影形式
a
dv dt
dvx i dvy dt dt
j dvz k dt
d2x dt 2
i
d2y dt 2
j
d2z dt 2
k
a axi ay j azk
ax
dvx dt
d2x dt 2
,
ay
dvy dt
dt
a 为速度大小变化率,在曲线中
at
ddvt 应为
切向加速度的代数值。
⑵ 指出在下列情况下,点M点作何种运动?
① a n 0 , at 常数 (匀变速直线运动)
二.点的速度
⒈ 投影形式
r xi yj zk
v dr dx i dy j dz k dt dt dt dt
v vxi vy j vzk
vx
dx dt
,
vy
dy dtቤተ መጻሕፍቲ ባይዱ
,
vz
dz dt
.
⒉ 大小和方向
⑴ 大小
v
vx2 vy2 vz2
dx 2 dy 2 dz 2 dt dt dt
a* v t
⒉ 加速度(瞬时)
a
lim v t0 t
dv dt
d 2r dt 2
r
四.速度端图
可确定 M 点瞬时加速度方向。
§6-2 点的运动的直角坐标法
一.运动方程及轨迹方程
x f1(t )
⒈ 运动方程 y f2 (t )
z f3 (t )
⒉ 轨迹方程
消去参数 t, 得 轨迹方程:
F(x,y,z)=0
作过M 点的平面,使其包含在该
点的两个切线单位矢量 t 和 tM。当 M M 接近M时,该平面绕 t 转动。当 M M
M 时 ,S → 0 ,该平面 →某一极限位
置。该极限位置的平面称为曲线在 M 点的 密切面。
⒉ 法面 过M 点且⊥切线单位
矢量 t 的平面。称为曲线
在 M 点的 法面。
⒊ 法线 在法面内过 M 点的任
引言
运动学的基本概念
⑴ 运动学的 是研究物体在空间位置随时间变化的几何 研究对象 性质的科学。包括研究物体运动的轨迹、
速度、加速度等而不考虑物体运动的原因。
⑵ 运动学的 研究内容
①建立机械运动的描述方法 ②建立运动量之间的关系
⑶ 运动学学习目的 为后续课打基础及直接运用于工程实际。
⑷ 运动的相对性 参考体(物);参考系;静系;动系。
v ⑵ 指向: 沿轨迹切线方向
ds 0 时,指向与t 相同
dt
反之,指向与 t 相反
三. 点的加速度
a
dv dt
d (vt )
dt
dv t
dt
v dt
dt
d 2S dt 2
t
v dt
dt
⒈ 切向加速度 at — 表示速度大小随时间的变化率
at
ddvt t
d 2S dt 2
t
⒉ 法向加速度 an — 表示速度方向随时间的变化率
t 0, t 的方向沿主法线 n 的方向.
S
即:
an
v2
n
⒊ 加速度矢量 a 由 at 、 an组成
a
at
an
dv dt
t
v2
n
⒋ 加速度矢量在自然轴上的投影
at
dv , dt
an
v2
,
ab 0
⒌ 加速度矢量的 大小和方向
⑴ 大小: a
at 2 an2
dv dt
2
v2
2
⑵ 方向: arctg | at |
⒈ 应用条件 ⑴ 点的运动轨迹曲线 已知。 ⑵ 已知任一瞬时点在 轨迹曲线上的位置。
⒉ 弧坐标
S OM
⒊ 以弧坐标表示的运动方程
S f (t)
补充:用极坐标法表 示的点的运动方程 (适用 于点作平面曲线运动)
r f1(t)
f2 (t)
同理可导出柱坐标下的点的运动方程
二.自然轴系
⒈ 密切面
an
四.点作匀变速曲线运动公式
at 常数
v v0 at t
s
s0
v0t
1 2
at t 2
v2 v02 2at (ss0 )
(t0时 vv0,ss0 )
课堂练习
⑴
dv dt
与
dv dt
有何不同?就点作直线和曲线运动分别说明。
dv a (直线.曲线都一样,是点的全加速度矢),直线
运动时dt,dv
而 b t n (注意 n 、b 、t 指向)
二. 点的速度
⒈ 瞬时速度表达式 v lim r lim ( r S )
t0 t t0 S t lim S lim r dS dr
t0 t t0 S dt dS
dS t v t
dt
⒉ 速度的代数值及指向
⑴ 代数值: v ds , dt
d2y dt 2
, az
dvz dt
d2z dt 2
⒉ 大小和方向
⑴ 大小
a a2x a2y a2z
⑵ 方向
d2x dt 2
2
d2y dt 2
2
d2z dt 2
2
cos(ai )
ax
, cos(aj)
ay
, cos(ak )
az
a
a
a
§6-3 点的运动的自然坐标法
一. 自然坐标法( 自然法 ) 以点的轨迹作为一条曲线形式的坐标轴来确定 动点的位 置的方法叫自然坐标法。
第六章 点的运动学
§6–1 点的运动矢量分析方法 §6–2 点的运动的直角坐标法 §6–3 点的运动的自然坐标法
§6-1 点的运动矢量分析方法
一.运动方程及轨迹方程
r OM r (t)
二.点的速度
⒈ 平均速度
v r , t
⒉ 速度(瞬时)
v lim r dr r t0 t dt
三.加速度 ⒈ 平均加速度