CoDeSys SoftMotion 运动控制中文编程手册
CODESYS运动控制之连接实轴

CODESYS运动控制之连接实轴
CODESYS运动控制之连接实轴
本文是在《CODESYS运动控制之如何添加实轴》的基础上,来讲述实轴的连接。
CODESYS是一个跨平台的软件,前面一系列轴的测试都是基于softmotion来测试的,更换设备后,之前编写的轴控制程序依然可以使用。
1:更换设备,把softmotion win 更换为Softmotion RTE
2:更新后的设备如下
3:添加实轴
3.1添加设备描述文件
3.2:工程中添加设备
添加主站
3.3添加从站:L6E为步骤添加的驱动器
3.4:添加轴。
CIA402轴为完整参数的轴,而Light版的只能进行一些简单的逻辑控制。
4:双击主站,EtherCAT_Master,选择网卡
5:缩放/映射设置
6:我们在功能块的使用中对三个轴的控制的程序基础上,把Z轴更换为新添加的实轴
7:把控制程序更改到EtherCAT_Task任务配置下
8:可视化界面中关联实轴
9:扫描,下载程序,并启动
输入X轴运行速度100
10:点击启动,三个轴就会运行起来,更改速度,轴的运行速度相应变化
11:在实轴的属性中可以看到设置值跟反馈值存在一定的偏差,与实际工况相符。
之前基于虚轴测试,都是理论上的值,而在实际中给定与反馈之间存在一定偏差。
Codesys中文编程手册-CN

Codesys中文编程手册_CNCodesys PLC目录第 1 页目录1 Codesys PLC Control 简介...................................................................... .. (1)1.1 引言...................................................................... .................................................................. 1 1.2 项目组件...................................................................... ........................................................... 3 1.3 语言...................................................................... . (10)1.3.1 编程语言...................................................................... (10)1.3.2 指令表(IL) ................................................................... .. (10)1.3.3 结构化文本(ST).................................................................. . (12)1.3.4 顺序功能图(SFC) ................................................................ (17)1.3.5 功能块图(FBD)................................................................. (21)1.3.6 连续功能图编辑器(CFC) ................................................................ . (21)1.3.6 梯形图(LD).................................................................. .. (22)1.4 调试,联机功能...................................................................... .. (24)1.5 IEC 61131-3 ...................................................................... .................................................... 26 2 样例程序...................................................................... ................................................................ 27 2.1 样例程序...................................................................... ......................................................... 27 3 子项组件...................................................................... ................................................................ 36 3.1 主窗口 ..................................................................... ............................................................. 36 3.2 选项...................................................................... ................................................................ 38 3.3 项目管理...................................................................... ......................................................... 53 3.4 对象...................................................................... ................................................................ 74 3.5 编辑功能...................................................................... ......................................................... 87 3.6 联机功能...................................................................... ......................................................... 92 3.7 窗口...................................................................... .............................................................. 101 3.8 帮助系统...................................................................... ........................................................ 102 3.9 日志...................................................................... .............................................................. 103 4 编辑器 ..................................................................... (105)4.1 概述...................................................................... .............................................................. 105 4.2 声明编辑器 ..................................................................... .. (107)4.3 文本编辑器 ..................................................................... .. (118)4.4 指令表编辑器...................................................................... . (122)4.5 结构化文本编辑器...................................................................... (124)4.6 图形编辑器 ..................................................................... .. (125)4.7 功能块图编辑器 ..................................................................... . (127)2目录第 2 页4.8 梯形图编辑器...................................................................... . (132)4.9 连续功能图编辑器...................................................................... (137)4.10 顺序功能图编辑器...................................................................... (150)5 资源...................................................................... ..................................................................... 159 5.1 概述...................................................................... .............................................................. 159 5.2 全局变量...................................................................... ........................................................ 160 5.3 PLC 配置............................................................................................................................ 163 5.4 任务配置...................................................................... ........................................................ 164 5.5 抽样跟踪...................................................................... ........................................................ 167 5.6 监视和接收管理器...................................................................... (172)6 库管理 ..................................................................... (175)6.1 库管理器...................................................................... ........................................................ 175 7 工程接口(ENI) ................................................................ .. (177)7.1 概述...................................................................... .............................................................. 177 8 附录...................................................................... ..................................................................... 180 8.1 数据类型...................................................................... ........................................................ 180 8.1.1 概述...................................................................... ........................................................ 180 8.1.2 标准数据类型...................................................................... (181)8.1.2.1 BOOL.................................................................... ................................................. 181 8.1.2.2 BYTE.................................................................... .................................................. 181 8.1.2.3 WORD.................................................................... ................................................ 182 8.1.2.4 DWORD................................................................... ............................................... 182 8.1.2.5SINT ................................................................... .................................................... 182 8.1.2.6USINT .................................................................. ................................................... 182 8.1.2.7 INT..................................................................... ..................................................... 182 8.1.2.8UINT ................................................................... .................................................... 182 8.1.2.9DINT ................................................................... .................................................... 183 8.1.2.10UDINT .................................................................. .................................................. 183 8.1.2.11 REAL.................................................................... .................................................. 183 8.1.2.12 LREAL................................................................... ................................................. 183 8.1.2.13 STRING.................................................................. ................................................ 183 8.1.2.14 TIME.................................................................... ................................................... 184 8.1.2.15TIME_OF_DAY ............................................................ ........................................... 184 8.1.2.16 DATE.................................................................... .................................................. 184 8.1.2.17DATE_AND_TIME........................................................... (184)8.1.3. 用户数据类型...................................................................... (185)8.1.3.1 数组...................................................................... .. (185)8.1.3.2 指针...................................................................... .. (186)8.1.3.3 枚举(ENUM) ............................................................... (186)3目录第 3 页8.1.3.4 结构(STRUCT) ............................................................. . (187)8.1.3.5 参考类型(别名).................................................................... . (188)8.1.3.6 子范围类型 ..................................................................... . (189)8.2 操作符 ..................................................................... ........................................................... 190 8.2.1 概述...................................................................... ........................................................ 190 8.2.2 IEC 操作符概述...................................................................... .. (190)8.2.3 数值操作符 ..................................................................... . (193)8.2.3.1 ABS..................................................................... ................................................... 193 8.2.3.2 ACOS.................................................................... ................................................. 193 8.2.3.3ASIN ................................................................... ................................................... 193 8.2.3.4 ATAN.................................................................... .................................................. 193 8.2.3.5 COS..................................................................... .................................................. 194 8.2.3.6 EXP..................................................................... ................................................... 194 8.2.3.7EXPT ................................................................... .................................................. 194 8.2.3.8 LN...................................................................... .................................................... 194 8.2.3.9 LOG..................................................................... .................................................. 195 8.2.3.10SIN .................................................................... ..................................................... 195 8.2.3.11 SQRT.................................................................... .................................................. 195 8.2.3.12 TAN..................................................................... ................................................... 195 8.2.4 算术操作符 ..................................................................... . (196)8.2.4.1ADD .................................................................... ................................................... 196 8.2.4.2MUL .................................................................... ................................................... 196 8.2.4.3SUB .................................................................... ................................................... 196 8.2.4.4DIV .................................................................... ..................................................... 197 8.2.4.5MOD .................................................................... .................................................. 197 8.2.5 位串操作符 ..................................................................... . (198)8.2.5.1AND .................................................................... ................................................... 198 8.2.5.2OR ..................................................................... .................................................... 198 8.2.5.3XOR .................................................................... ................................................... 198 8.2.5.4NOT .................................................................... ................................................... 199 8.2.6 位移操作符 ..................................................................... . (199)8.2.6.1SHL .................................................................... .................................................... 199 8.2.6.2SHR .................................................................... ................................................... 200 8.2.6.3ROL .................................................................... ................................................... 201 8.2.6.4 ROR..................................................................... .................................................. 201 8.2.7 选择操作符 ..................................................................... . (203)8.2.7.1SEL .................................................................... .................................................... 203 8.2.7.2 MAX..................................................................... .................................................. 203 8.2.7.3MIN..................................................................... ................................................... 204 8.2.7.4 LIMIT................................................................... ................................................... 204 8.2.7.5 MUX..................................................................... .................................................. 204 8.2.8 比较操作符 ..................................................................... . (206)8.2.8.1 GT...................................................................... . (206)48.2.8.2 LT...................................................................... ..................................................... 206 目录第 4 页8.2.8.3LE ..................................................................... ..................................................... 206 8.2.8.4 GE...................................................................... .................................................... 207 8.2.8.5 EQ...................................................................... .................................................... 207 8.2.8.6 NE...................................................................... .................................................... 208 8.2.9 选择不同的操作符...................................................................... .. (209)8.2.9.1 INDEXOF................................................................. .............................................. 209 8.2.9.2 SIZEOF.................................................................. ................................................ 209 8.2.9.3 ADR(地址操作符)) ................................................................. . (209)8.2.9.4 ^(内容操作符) ................................................................... (209)8.2.9.5 CAL(调用操作符) ................................................................... . (209)8.2.9.6BITADR ................................................................. ................................................. 210 8.2.10 类型转换操作符 ..................................................................... (211)8.2.10.1 BOOL_TO 转换...................................................................... . (211)8.2.10.2 TO_BOOL 转换...................................................................... .. (211)8.2.10.3 STRING_TO 转换...................................................................... . (211)8.2.10.4 TO_STRING 转换...................................................................... . (211)8.2.10.5 TIME_TO 转换...................................................................... (212)8.2.10.6 DATE_TO 转换...................................................................... .. (212)8.2.10.7 TOD_TO 转换...................................................................... . (212)8.2.10.8 ―DT_TO 转换...................................................................... .. (212)8.2.10.9 REAL_TO-/LREAL_TO 转换...................................................................... (213)8.2.10.10 整型数类型之间的转换...................................................................... . (213)8.2.10.11TRUNC .................................................................. ................................................ 213 8.3 操作数 ..................................................................... ........................................................... 214 8.3.1 常数...................................................................... ........................................................ 214 8.3.1.1 BOOL 常数...................................................................... .. (214)8.3.1.2 TIME 常数...................................................................... . (214)8.3.1.3 DATE 常数...................................................................... (214)8.3.1.4 TIME_OF_DAY 常数...................................................................... (214)8.3.1.5 DATE_AND_TIME 常数...................................................................... . (215)8.3.1.6 数值常数...................................................................... .. (215)8.3.1.7 REAL/LREAL 常数...................................................................... (215)8.3.1.8 STRING 常数...................................................................... .. (215)8.3.1.9 类型符...................................................................... .. (216)8.3.2 变量...................................................................... ........................................................ 217 8.3.2.1 变量...................................................................... .. (217)8.3.2.2 地址...................................................................... .. (217)8.3.2.3 存取数组、结构和 POU 变量...................................................................... .. (218)8.3.2.4 变量的位寻址...................................................................... (218)8.3.2.5 功能...................................................................... .. (218)8.3.2.6 系统标志...................................................................... . (218)8.3.2.6.1 概述...................................................................... .. (218)58.3.2.6.2SYSTEMINFO ............................................................. . (219)8.3.2.6.3 SYSTEMTASKINFOARR....................................................... (219)目录第 5 页8.4 系统功能...................................................................... ........................................................ 220 8.4.1 CheckBounds 功能...................................................................... .. (220)8.4.2 CheckDivByte 功能...................................................................... .. (221)8.4.3 CheckDivReal 功能 ..................................................................... .. (221)8.4.4 CheckDivWord 功能...................................................................... .. (222)8.4.5 CheckDivDWord 功能 ..................................................................... .. (222)8.4.6 CheckRangeSigned 功能...................................................................... . (223)8.4.7 CheckRangeUnsigned 功能...................................................................... . (224)8.5 使用键盘...................................................................... ........................................................ 226 8.6 创建错误表...................................................................... . (230)8.7 命令行命令 ..................................................................... .. (245)6Codesys PLC Control:简介第 1 页共 249 页1 Codesys PLC Control 简介1.1 引言Codesys PLC ControlCodesys PLC Control 是为PLC 设计的一种完整的开发环境。
codesys编程手册
1.1 CoDeSys 是什么 ................................................................................................................... 4 1.2 CoDeSys 功能一览................................................................................................................ 4 2. CoDeSys 组成 ............................................................................................................................... 7 2.1 工程组件............................................................................................................................. 7
Codesys中文编程手册-CN
Codesys中文编程手册_CNCodesys PLC目录第 1 页目录1 Codesys PLC Control 简介...................................................................... .. (1)1.1 引言...................................................................... .................................................................. 1 1.2 项目组件...................................................................... ........................................................... 3 1.3 语言...................................................................... . (10)1.3.1 编程语言...................................................................... (10)1.3.2 指令表(IL) ................................................................... .. (10)1.3.3 结构化文本(ST).................................................................. . (12)1.3.4 顺序功能图(SFC) ................................................................ (17)1.3.5 功能块图(FBD)................................................................. (21)1.3.6 连续功能图编辑器(CFC) ................................................................ . (21)1.3.6 梯形图(LD).................................................................. .. (22)1.4 调试,联机功能...................................................................... .. (24)1.5 IEC 61131-3 ...................................................................... .................................................... 26 2 样例程序...................................................................... ................................................................ 27 2.1 样例程序...................................................................... ......................................................... 27 3 子项组件...................................................................... ................................................................ 36 3.1 主窗口 ..................................................................... ............................................................. 36 3.2 选项...................................................................... ................................................................ 38 3.3 项目管理...................................................................... ......................................................... 53 3.4 对象...................................................................... ................................................................ 74 3.5 编辑功能...................................................................... ......................................................... 87 3.6 联机功能...................................................................... ......................................................... 92 3.7 窗口...................................................................... .............................................................. 101 3.8 帮助系统...................................................................... ........................................................ 102 3.9 日志...................................................................... .............................................................. 103 4 编辑器 ..................................................................... (105)4.1 概述...................................................................... .............................................................. 105 4.2 声明编辑器 ..................................................................... .. (107)4.3 文本编辑器 ..................................................................... .. (118)4.4 指令表编辑器...................................................................... . (122)4.5 结构化文本编辑器...................................................................... (124)4.6 图形编辑器 ..................................................................... .. (125)4.7 功能块图编辑器 ..................................................................... . (127)2目录第 2 页4.8 梯形图编辑器...................................................................... . (132)4.9 连续功能图编辑器...................................................................... (137)4.10 顺序功能图编辑器...................................................................... (150)5 资源...................................................................... ..................................................................... 159 5.1 概述...................................................................... .............................................................. 159 5.2 全局变量...................................................................... ........................................................ 160 5.3 PLC 配置............................................................................................................................ 163 5.4 任务配置...................................................................... ........................................................ 164 5.5 抽样跟踪...................................................................... ........................................................ 167 5.6 监视和接收管理器...................................................................... (172)6 库管理 ..................................................................... (175)6.1 库管理器...................................................................... ........................................................ 175 7 工程接口(ENI) ................................................................ .. (177)7.1 概述...................................................................... .............................................................. 177 8 附录...................................................................... ..................................................................... 180 8.1 数据类型...................................................................... ........................................................ 180 8.1.1 概述...................................................................... ........................................................ 180 8.1.2 标准数据类型...................................................................... (181)8.1.2.1 BOOL.................................................................... ................................................. 181 8.1.2.2 BYTE.................................................................... .................................................. 181 8.1.2.3 WORD.................................................................... ................................................ 182 8.1.2.4 DWORD................................................................... ............................................... 182 8.1.2.5SINT ................................................................... .................................................... 182 8.1.2.6USINT .................................................................. ................................................... 182 8.1.2.7 INT..................................................................... ..................................................... 182 8.1.2.8UINT ................................................................... .................................................... 182 8.1.2.9DINT ................................................................... .................................................... 183 8.1.2.10UDINT .................................................................. .................................................. 183 8.1.2.11 REAL.................................................................... .................................................. 183 8.1.2.12 LREAL................................................................... ................................................. 183 8.1.2.13 STRING.................................................................. ................................................ 183 8.1.2.14 TIME.................................................................... ................................................... 184 8.1.2.15TIME_OF_DAY ............................................................ ........................................... 184 8.1.2.16 DATE.................................................................... .................................................. 184 8.1.2.17DATE_AND_TIME........................................................... (184)8.1.3. 用户数据类型...................................................................... (185)8.1.3.1 数组...................................................................... .. (185)8.1.3.2 指针...................................................................... .. (186)8.1.3.3 枚举(ENUM) ............................................................... (186)3目录第 3 页8.1.3.4 结构(STRUCT) ............................................................. . (187)8.1.3.5 参考类型(别名).................................................................... . (188)8.1.3.6 子范围类型 ..................................................................... . (189)8.2 操作符 ..................................................................... ........................................................... 190 8.2.1 概述...................................................................... ........................................................ 190 8.2.2 IEC 操作符概述...................................................................... .. (190)8.2.3 数值操作符 ..................................................................... . (193)8.2.3.1 ABS..................................................................... ................................................... 193 8.2.3.2 ACOS.................................................................... ................................................. 193 8.2.3.3ASIN ................................................................... ................................................... 193 8.2.3.4 ATAN.................................................................... .................................................. 193 8.2.3.5 COS..................................................................... .................................................. 194 8.2.3.6 EXP..................................................................... ................................................... 194 8.2.3.7EXPT ................................................................... .................................................. 194 8.2.3.8 LN...................................................................... .................................................... 194 8.2.3.9 LOG..................................................................... .................................................. 195 8.2.3.10SIN .................................................................... ..................................................... 195 8.2.3.11 SQRT.................................................................... .................................................. 195 8.2.3.12 TAN..................................................................... ................................................... 195 8.2.4 算术操作符 ..................................................................... . (196)8.2.4.1ADD .................................................................... ................................................... 196 8.2.4.2MUL .................................................................... ................................................... 196 8.2.4.3SUB .................................................................... ................................................... 196 8.2.4.4DIV .................................................................... ..................................................... 197 8.2.4.5MOD .................................................................... .................................................. 197 8.2.5 位串操作符 ..................................................................... . (198)8.2.5.1AND .................................................................... ................................................... 198 8.2.5.2OR ..................................................................... .................................................... 198 8.2.5.3XOR .................................................................... ................................................... 198 8.2.5.4NOT .................................................................... ................................................... 199 8.2.6 位移操作符 ..................................................................... . (199)8.2.6.1SHL .................................................................... .................................................... 199 8.2.6.2SHR .................................................................... ................................................... 200 8.2.6.3ROL .................................................................... ................................................... 201 8.2.6.4 ROR..................................................................... .................................................. 201 8.2.7 选择操作符 ..................................................................... . (203)8.2.7.1SEL .................................................................... .................................................... 203 8.2.7.2 MAX..................................................................... .................................................. 203 8.2.7.3MIN..................................................................... ................................................... 204 8.2.7.4 LIMIT................................................................... ................................................... 204 8.2.7.5 MUX..................................................................... .................................................. 204 8.2.8 比较操作符 ..................................................................... . (206)8.2.8.1 GT...................................................................... . (206)48.2.8.2 LT...................................................................... ..................................................... 206 目录第 4 页8.2.8.3LE ..................................................................... ..................................................... 206 8.2.8.4 GE...................................................................... .................................................... 207 8.2.8.5 EQ...................................................................... .................................................... 207 8.2.8.6 NE...................................................................... .................................................... 208 8.2.9 选择不同的操作符...................................................................... .. (209)8.2.9.1 INDEXOF................................................................. .............................................. 209 8.2.9.2 SIZEOF.................................................................. ................................................ 209 8.2.9.3 ADR(地址操作符)) ................................................................. . (209)8.2.9.4 ^(内容操作符) ................................................................... (209)8.2.9.5 CAL(调用操作符) ................................................................... . (209)8.2.9.6BITADR ................................................................. ................................................. 210 8.2.10 类型转换操作符 ..................................................................... (211)8.2.10.1 BOOL_TO 转换...................................................................... . (211)8.2.10.2 TO_BOOL 转换...................................................................... .. (211)8.2.10.3 STRING_TO 转换...................................................................... . (211)8.2.10.4 TO_STRING 转换...................................................................... . (211)8.2.10.5 TIME_TO 转换...................................................................... (212)8.2.10.6 DATE_TO 转换...................................................................... .. (212)8.2.10.7 TOD_TO 转换...................................................................... . (212)8.2.10.8 ―DT_TO 转换...................................................................... .. (212)8.2.10.9 REAL_TO-/LREAL_TO 转换...................................................................... (213)8.2.10.10 整型数类型之间的转换...................................................................... . (213)8.2.10.11TRUNC .................................................................. ................................................ 213 8.3 操作数 ..................................................................... ........................................................... 214 8.3.1 常数...................................................................... ........................................................ 214 8.3.1.1 BOOL 常数...................................................................... .. (214)8.3.1.2 TIME 常数...................................................................... . (214)8.3.1.3 DATE 常数...................................................................... (214)8.3.1.4 TIME_OF_DAY 常数...................................................................... (214)8.3.1.5 DATE_AND_TIME 常数...................................................................... . (215)8.3.1.6 数值常数...................................................................... .. (215)8.3.1.7 REAL/LREAL 常数...................................................................... (215)8.3.1.8 STRING 常数...................................................................... .. (215)8.3.1.9 类型符...................................................................... .. (216)8.3.2 变量...................................................................... ........................................................ 217 8.3.2.1 变量...................................................................... .. (217)8.3.2.2 地址...................................................................... .. (217)8.3.2.3 存取数组、结构和 POU 变量...................................................................... .. (218)8.3.2.4 变量的位寻址...................................................................... (218)8.3.2.5 功能...................................................................... .. (218)8.3.2.6 系统标志...................................................................... . (218)8.3.2.6.1 概述...................................................................... .. (218)58.3.2.6.2SYSTEMINFO ............................................................. . (219)8.3.2.6.3 SYSTEMTASKINFOARR....................................................... (219)目录第 5 页8.4 系统功能...................................................................... ........................................................ 220 8.4.1 CheckBounds 功能...................................................................... .. (220)8.4.2 CheckDivByte 功能...................................................................... .. (221)8.4.3 CheckDivReal 功能 ..................................................................... .. (221)8.4.4 CheckDivWord 功能...................................................................... .. (222)8.4.5 CheckDivDWord 功能 ..................................................................... .. (222)8.4.6 CheckRangeSigned 功能...................................................................... . (223)8.4.7 CheckRangeUnsigned 功能...................................................................... . (224)8.5 使用键盘...................................................................... ........................................................ 226 8.6 创建错误表...................................................................... . (230)8.7 命令行命令 ..................................................................... .. (245)6Codesys PLC Control:简介第 1 页共 249 页1 Codesys PLC Control 简介1.1 引言Codesys PLC ControlCodesys PLC Control 是为PLC 设计的一种完整的开发环境。
CoDeSys使用手册 V1.1

图 1. 3
图 1. 4
2 地址:佛山市顺德区大良德胜东路 3 号研发大楼六层 电话:0757 - 28697009 / 28697010 邮编:528300 传真: +86 - 757 - 28697016 邮箱:webmaster@ 网站:
运行 Setup_CoDeSysV35.exe 安装文件, 按照以下提示进行安装。 安装程序会自动下载并安装 相应的组件,如 Microsoft .NET Framework 4.0 Full,因此安装前电脑必须联网。
图 1. 1
图 1. 2
1 地址:佛山市顺德区大良德胜东路 3 号研发大楼六层 电话:0757 - 28697009 / 28697010 邮编:528300 传真: +86 - 757 - 28697016 邮箱:webmaster@ 网站:
2 CoDeSys 介绍
2.1 什么是 CoDeSys
CoDeSys(Controlled Developement System) 是一种功能强大的 PLC 软件编程工具,它支持 IEC61131-3 标准 IL、ST、FBD、LD、CFC、SFC 六种 PLC 编程语言,系统的编辑器和调试器的 功能是建立在高级编程语言的基础上。 CoDeSys 的 架 构 基 本 上 可 以 分 为 三 层 : 应 用 开 发 层 ( Development Layer ) 、通信层 ( Communication Layer ) 、设备层( Device Layer ) 。 CoDeSys 不仅支持目前主流的 CANopen 、 Profibus、EtherCAT、SERCOS、DeviceNET、ProfiNET、Modbus、Ethernet 等多种现场总线,还 可以根据用户需求将不同自动化厂商的产品和系统进行组合配置后统一编程,从而真正实现控制 系统的开放性和可重构性。 CoDeSys Controller 软件包(the SoftPLC Runtime System)能将嵌入式系统或者 PC 设备变成 基于 IEC61131-3 国际标准的,功能强大的可编程控制器。其中 CoDeSys SoftMotion 软件包将逻 辑控制(SoftPLC)和运动控制(SoftMotion) 、SoftMotion CNC、可视化界面(HMI)融为一体, 实现了逻辑控制到单轴运动再到复杂的 CNC 多轴轨迹插补的编程和控制。
CoDeSys编程手册范本

声明部分:
FUNCTIONFct:INT
VAR_INPUT
PAR1:INT;
PAR2:INT;
PAR3:INT;
END_VAR
程序部分:
LDPAR1
MULPAR2
DIVPAR3
STFct
在结构文本中功能的调用可以作为表达式中的一个操作数。
功能不会有任何内部条件,这就是说,调用带有相同的输入变量功能将会返回相同的输出结果。
为了通讯的目的,CoDeSys有一个符号接口和一个动态数据交换(DDE)接口。网关服务器和OPC服务器和动态数据交换服务器是CoDeSys的标准安装软件包的组件。
使用恰当的目标设置能够把相同的CoDeSys工程加载到不同的目标系统中,可以通过目标文件来加载这些目标设置。
通过当前的目标设置来激活网络全局变量和参数管理器。可以在控制器网络中交换数据。
例如:
FBINST是一个功能块类型的局部变量,它包含了输入变量xx和输出变量yy。当FBINST是通过输入帮助插入到了ST程序中,将显示如下的调用:FBINST1(xx:=,yy=>)。
在调用输入输出变量时:
请注意:功能块的输入输出变量作为指针来处理。因此在调用一个功能块时,常量是不能赋予VAR_IN_OUT并且从外部没有读和写的权限。
FUNCTION_BLOCKFUB
VAR_INPUT
PAR1:INT;
PAR2:INT;
END_VAR
VAR_OUTPUT
MELERG:INT;
VERGL:BOOL;
END_VAR
在IL的执行部分:
LDPAR1
MULPAR2
CODESYS运动控制之MC_Power
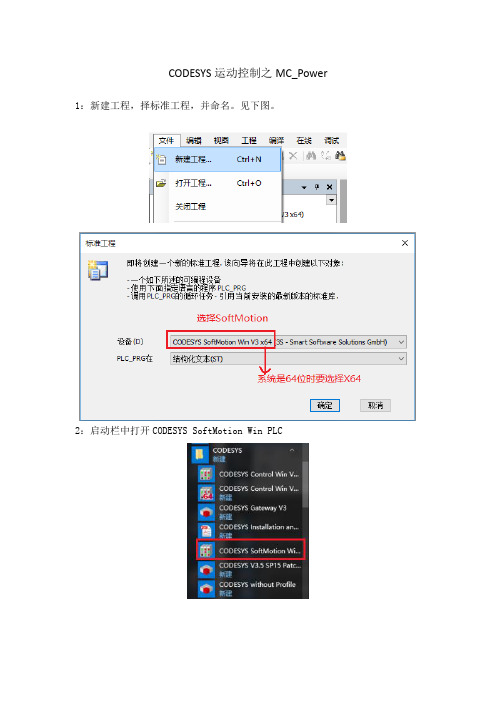
CODESYS运动控制之MC_Power 1:新建工程,择标准工程,并命名。
见下图。
2:启动栏中打开CODESYS SoftMotion Win PLC
启动完成
3:添加设备,选择虚拟驱动器
4:双击项目树的设备
注意:设备中不要勾选“通过设备ID过滤网络扫描”
5:启动PLC, 电脑任务栏中找到PLC图标,并启动
6:扫描出设备后,选中然后点击确定
此时网关和PLC有右下角均变成绿色
7:编译并下载
8:点击启动,就可以看到启动后轴的状态
9:点击退出
10:添加POU
11:编写程序
11.1:从右侧工具箱拖一个运算块至程序中
11.2在拖过来的运算块的???处输入MC_POWER,按确认,就可以对变量自动声明。
11.3 下图是自动声明后的变量及程序
12:调用POU
13:程序编译,下载
14:下载后,点击启动出现如下界面
15:此时轴的状态为断电
16:对轴进行上电,在变量 bRegulatorON 的“准备值”后点击一下就会出现TRUE,然后点击菜单栏中“调试”下的“写入值”
18:轴上电之后的状态如下
注意:MC_POWER功能块接口简介如下
当Enable 为True 时,MC功能块才使能
当bRegulatorOn 为FALSE 时,轴的状态poweroff
没有错误时,当bRegulatorOn 为TRUE ,轴的状态变为standstil 如果检测到错误, 轴的状态将被置为errorstop.
I如果突然失电,轴的状态将被置为errorstop.。
台达CODESYS运动控制方案说明书

目录台达 CODESYS 运动控制方案产品介绍运动控制器现场装置人机界面软件硬件规格选型说明产品信息台达 CODESYS 运动控制方案自动化和数字化在智能制造时代中扮演重要的角色。
机械制造商为了增加竞争力,积极寻找可以快速扩展设备开发和应用的方法,以减少机台建造所需投入的时间和人力。
台达和 CODESYS 集团合作,开发以CODESYS 平台为基础的全新运动控制解决方案。
CODESYS 平台为一符合IEC 61131-3标准且容易上手的整合平台。
此平台丰富的运动控制功能可以支持全球使用者多样化的应用,并方便落实到现有设备。
台达 CODESYS 运动控制方案整合PLC 、HMI 、和运动控制器的控制功能,并将其运用在不同的新产品中,包括PC-Based 运动控制器AX-864E 系列和PLC-Based 运动控制器AX-308E 系列。
此方案通过EtherCAT 运动总线,可同步控制台达交流伺服驱动器ASDA-A3-E 、ASDA-B3-E 、ASDA-A2-E 等系列、精巧标准型矢量控制变频器MS300 / MH300系列、泛用型矢量控制变频器C2000 Plus 系列、远端模块R1-EC 系列和DVP EtherCAT 远端I/O 模块。
完善、整合性高的台达 CODESYS 运动控制方案,可满足多样的应用需求。
PC-Based 运动控制器AX-864E 系列PLC-Based 运动控制器AX-308E 系列伺服驱动器PC-Based PLC-Based人机界面远端I/O 模块變頻器ASDA-A2-EASDA-A3-EASDA-B3-EAX-864EAX-308EDOP-100R1-ECDVP(EtherCAT 远端I/O 模块)C2000 PlusMH300MS300软件运动控制器现场装置●使用符合国际 IEC 61131-3 规范的CODESYS SoftPLC 开发软件和SoftMotion ●最多可支持 64 轴●无排线、无风扇的标准工业计算机等级架构 ●Intel x86 CPU●内置安全IC 系统,提升软硬件安全性 ●低电压检测机制和资料覆写功能 ●内置8组高速输入/输出接口●适合运用于工业机器人、木工、印刷、包装、印刷等行业●AX-308E CPU 最多可支持 8 轴 EtherCAT 伺服 (最短同步时间: 8轴 / 2 ms )●支持台达PLC AS 系列电源、数字IO 、模拟IO 和温度扩展模块 ●高效能: 基本指令的最短执行时间为5 ns●提供常用指令如位置、速度、扭矩、多轴补间、E-gear 、ECAM 等指令●内置16组DI 、8组DO 、2组增量编码器、SSI 绝对型编码器、RS232/485、Ethernet 和EtherCAT 通讯接口PC-Based 运动控制器AX-864E支持EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供全面和整合的运动控制解决方案PLC-Based 运动控制器AX-308E支持 EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供不同行业实时弹性的运动控制解决方案运动控制器现场装置交流伺服系统符合IEC 61158和IEC 61800-7现场总线标准;支持CiA402规格中所有CoE 模式和各项EtherCAT 命令模式ASDA-A2-EASDA-B3-EASDA-A3-E●CODESYS 原厂认证●通过ETG (EtherCAT Technology Group)兼容性测试认证 ●支持绝对型和增量型编码器伺服电机 ●支持高速位置抓取功能●ASDA-A3-E 和ASDA-A2-E 内置符合SIL2 (IEC EN 61508 & IEC 62016) / Cat. 3 PL=d (ISO 13894-1)标准的安全扭矩停止功能 (STO, Safe Torque Off)●高阶交流伺服驱动器●同步周期短,适用于多轴高速同步控制 ●支持绝对型和增量型ECMA 系列电机●电机功率范围: 200 V 100 W ~ 3 kW 、400 V 400 W ~ 7.5 kW●标准型交流伺服驱动器●3.1 kHz 速度响应频宽,缩短40%整定时间 ●高速轴间资料交换,提供简易龙门控制功能 ●兼容 A2 / B2 / A 3 系列电机,替换方便●电机功率范围: 200 V 100 W ~ 3 kW●高效能运动控制型交流伺服系统 ●3.1 kHz 速度响应频宽,提升设备产能●全新的挠性结构补偿和低频抑制功能,确保机台稳定度和缩短整定时间●薄型化设计,节省电器柜安装空间●电机功率范围: 200 V50 W ~ 15 kW台达 CODESYS 运动控制方案产品介绍精巧高效型 / 标准型矢量控制变频器MH300 / MS300体积精巧,内置安全扭矩停止功能STO 和EMC 滤波器,整合PLC ,支持多样的通讯协定和I/O 扩展模块高效能泛用型矢量控制变频器C2000 Plus精准的速度/扭矩/位置控制模式,内置PLC ,适用于有感测器/无传感器的同步与异步电机●功率范围: 115 V 0.2 kW ~ 0.75 kW 、230 V 0.2 kW ~ 15 kW 、460 V 0.4 kW ~ 22 kW●支持感应电机与永磁电机,开环/闭环控制 ●最高输出频率: 最高 2000 Hz / 1500 Hz●内置符合SIL2 (IEC EN 61508 & IEC 62016) /Cat.3 PL d (ISO 13894-1)标准的安全扭矩停止功能 STO (Safe Torque Off) ●內建PLC (5K / 2K steps)● 支持多样的通讯协定: Modbus 、CANopen 、EtherCAT 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP●电源模块: 连接EtherCAT 从站模块与100 BASE-TX EtherCAT 网络 ●数字输入模块: 16点Sink/Source 数字输入模块; 1 ms 和2 ms 的反应时间●数字输出模块: 6点数字输出模块; 输出电流:sink 型模块每点0.5 A ,source 型模块每点0.25 A ●ADC 模块: 4通道16-bit A / D 输入; DAC 模块: 4通道16-bit D / A 输出 ●运动模块: 单轴脉冲输出●手轮模块: 单通道手轮输入,4 / 6轴控制●EtherCAT 耦合器RTU-ECAT :内置2个EtherCAT 通讯端口,最多可支持8个DVP 薄型I/O 模块●数字输入模块: 支持8 / 16 / 32点NPN / PNP 输入 ●数字输出模块: 支持8 / 16/ 32点NPN / PNP/继电器输出●数字I/O 模块: 8点数字输入和8点数字输出,支持不同型态的输入/输出格式 ●模拟输入模块: 4 / 6通道,支持mA / V 输入 ●模拟输出模块: 2 / 4通道,支持mA / V 输出●数字I/O 模块: 4通道数字输入和2通道数字输出模块,支持mA / V 输入/输出型式●温度模块: 2 / 4 / 6 / 8通道,支持RTD 、热电偶和NTC 输入(注:详细信息请参照DVP 系列PLC 型录)●功率范围: 230 V 0.75 kW ~ 90 kW 、460 V 0.75 kW ~ 560 kW ●高过载承受度: 150 % / 60 秒和180 % / 3 秒,适用于恒定转矩应用 ●内置PLC (10k steps) ●支持点对点位置控制●采用3C3标准PCB 涂层,可确保变频器在恶劣环境下安全可靠运行●内置Modbus ,支持通讯扩展卡: CANopen 、EtherCAT 、ROFINET 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP远端I/O 模块R1-EC ( AX-864E 适用)耐用精巧的E-bus 从站模块,适用于高精度和高需求的产业应用远端I/O 模块RTU-ECAT (PLC DVP 薄型RTU 方案)适合多种应用的精巧EtherCAT 远端I/O模块方案现场装置台达 CODESYS运动控制方案产品介绍1 ms(sink/source)反应时间(sink/source) 反应时间制造设备程序控制第三方控制器AX-864EAX-308EEthernet运动控制编程软件 - Softmotion●支持单轴和多轴运动(主/从轴运动和凸轮控制) ●使用PLCopen 认证的POU库,编辑运动控制功能●图形化CAM 编辑软件整合配置、编程、编译、和调适功能; 无缝整合传统和系统性的编程方式●在SoftPLC 和控制器的runtime 模拟模式下显示应用资料 ●在监视列表中监看指定的数值●直接在对应的编辑器中读、写、和强制设定变量●单步或单周期执行程序码支持标准 IEC 61131-3 编程●结构化文本 (ST)●梯形图 (LD)工作与除错●功能块 (FBD)●顺序功能图 (SFC)产品信息电源输入接口DC 24 V (±15 %)SSI编码器输入接口SD 卡槽HDMI输出接口Gigabit LAN 接口(Modbus TCP / OPC UA)USB EtherCAT接口连接现场装置电源输入接口DC 24 V (±15 %)8组数字输入 / 8组数字输出OA / OB / OZ signalINC 编码器输入接口ABS SSI编码器输入接口外观说明外观说明137.4166.8141164153.2R2.5X2R1.4X2554.2PC-Based 运动控制器AX-864EPLC-Based 运动控制器AX-308E产品尺寸单位: mm产品尺寸单位: mm16组数字输入8组数字输出MicroSD 卡槽RS232 / 485接口EtherCAT接口增量型编码器输入接口 (×2)Ethernet接口连接现场装置硬件规格2021型号说明AX-864E P0MB1T产品类型AX - 3 系列AX - 8 系列I/O: (晶体管) T: NPN可控制轴数。
CoDeSys运动过程控制详解

SMC_TRAFO_Gantry3pi: SMC_PosInfo目标位置向量。
插补器的输出。
dOffsetX, dOffsetY: LREALx和y轴的偏移量。
dx, dy: LREALx和y轴的目标值SMC_TRAFOF_Gantry3dOffsetX, dOffsetY: LREALx和y轴的偏移量。
与SMC_TRAFO_Gantry3模块的相同。
minX, maxX, minY, maxY: LREAL移动范围(用于可视化部分)DriveX, DriveY: AXIS_REFx,y轴dx, dy: LREAL在GEO坐标系中x,y的位置。
dnx, dny, dnOffsetX, dnOffsetY: LREALx,y的标准化位置[0...1]和偏移量(用于可视化部分)ratio: LREALx间隔和y间隔的比率。
(用于可视化部分)SMC_InterpolatorSMC_Interpolator功能块用于将一段SMC_GEOINFO对象描述的连续轨迹转换成离散轨迹位置点(discrete path position points),因此需要考虑到定义的速度轮廓和时间式样。
这些位置点会由IEC程序(例如。
drive-ais-position)转换并送入驱动器。
模块的输入:bExecute: BOOL函数模块会重置,并在此输入出现上升沿时开始处理poqDataIn: POINTER TO SMC_OUTQUEUE此变量指向SMC_OUTQUEUE 结构体对象,包含了轨迹的SMC_GEOINFO对象;典型地,它指向前一个模块的输出DataOut(例如,SMC_NCDecoder/SMC_SmoothPath)。
bSlow_Stop: BOOL如果此变量被设置成FALSE(缺省值),在不停止的情况下通过轨迹。
若为TRUE,则SMC_Interpolator根据已定义的速度轮廓(byVelMode,见下方)和当前GEOINFO对象(dDecel,见下方)的最大延迟时间将速度减为0,并等到bSlow_Stop被重置为FALSE。
CODESYS运动控制之编写凸轮控制程序

CODESYS运动控制之编写凸轮控制程序
1:新建工程,添加主从轴,添加配置凸轮表等,可参照前面轴控制系列文章
2:添加LD凸轮控制程序,并调用,为了排除其他程序干扰,主程序调用里只保留本程序。
2.1添加凸轮使能,对于实轴而言,不建议直接触发,而是初始完成之后再进行触发。
2.2给X轴一个固定速速运行
2.3选择凸轮表,模式选择相对模式
2.4凸轮啮合
2.5与主轴脱离啮合
2.6从轴停止,脱离啮合完成后触发从轴停止
2.7主轴停止
3:添加凸轮控制视图,并关联变量
注意:因为视图中用了中文,所以要勾选使用Unicode字符串
4:启动softmotion
5: 扫描、登录并启动
6:在凸轮控制视图中可以看到,6.1当点击“启动主轴”,主轴运行
6.2点击“启动从轴”,从轴运行
6.3点击“从轴停止”,从轴停止运行
6.4点击“主轴停止”,主轴停止运行。
CodesysV2.3使用手册

1.4 拷贝library中的所有文件到安装目录中的library中,覆盖所有文件。 1.5 双击安装目录下的InstallTarget.exe,出现一下窗口,进行配置。
- Open Linux.tnf
- 忽略3个错误信息。 - 选择安装目录中的Targets\3S\Linux ,如果没有3S和Linux目录可以自己新建。 - 在右边单击3S-Smart Software Solutions 然后单击install按钮。 - CoDeSys for PPC full 应该会出现在 “Installed Targets”中 - 单击Close按钮 - 拷贝安装源目录config\下的taskconfig3s23.xml到安装目录下Targets\3S\Linux
Symbol: 单击它可以在当前页面中插入一个多边形。 'Insert' 'Curve'
Symbol: 单击它可以在当前页面中插入一个Bezier curve (贝塞尔曲线)。 'Insert' 'Pie'
Symbol: 单击它可以在当前页面中插入一个扇形区域。 'Insert' 'Bitmap'
Symbol:
Symbol: 单击它可以在当前页面中插入一个rectangle。 'Insert' 'Rounded Rectangle'
Symbol: 单击它可以在当前页面中插入一个导圆角的rectangle。 'Insert' &bol: 单击它可以在当前页面中插入一个圆或者是一个椭圆。 'Insert' 'Polygon'
1.6 对 CoDeSys的初次配置
codesys基本指令手册(C)

日立工业用控制器系列应用手册(服务手册)指令参考篇○质保期限及质保范围交货物品的质保期限自订单交到指定地点后一年。
在该质保期中,按照本使用说明书要求在产品规格范围内的正常使用状态下发生故障时,将对该机器的故障部分免费予以更换或修理。
但是,下列情况并不在本保证范围之列:(1) 需方的不当操作及使用所致;(2) 故障系交货物品以外的原因所致;(3) 非交货人实施的改造或修理所致;(4) 其他因天灾、灾害等非交货方责任所致;此处所涉及的保证是对交货物品部分的保证,由交货物品的故障所引发的损害并不在列。
并且,保证仅在日本国内有效。
○有偿修理质保期限(一年)后的检查及修理均为有偿。
并且,即使在质保期限内,上述质保范围之外的原因所导致的故障修理及故障原因调查将有偿进行,请联系购货经销商或售后维修站。
(但是有些故障点可能无法进行故障原因调查,敬请谅解)○部件订购或咨询当您需要与我们联系关于产品故障、部件订购或咨询其他事项时,请准备好以下几项信息,然后与购货经销商或售后维修站联系:(1) 型号(2) 制造编号(MFG.NO.)(3) 故障内容○需要阅读此手册的人员此手册适用于以下人员阅读:・PLC导入研究人员・PLC系统设计人员・PLC机器安装、连接人员・PLC导入后的管理人员安全注意事项安装、运行、维修及检查前,请务必熟读本使用说明书和其他相关资料,并正确使用。
请在充分掌握机器知识、了解安全信息和注意事项后再使用。
并且,请务必将此手册交由最终维护人员管理。
此手册中,安全注意事项被分为“危险”和“注意”两个等级。
而且,有些情况下标记的内容也可能引起严重事故。
无论哪种注意事项,它们都包含了重要的信息,请务必遵守。
禁止和强制的标志说明如下::表明禁止的事项(不可操作)。
例如:当禁止明火的时候,则显示:表明强制的事项(必须做)。
。
1. 安装3. 使用注意事项版本修订记录目录1.1 变量 ............................................................................................................................................................. 1-1 1.2 常量 ............................................................................................................................................................. 1-2 1.3 局部变量与全局变量 ................................................................................................................................. 1-2 1.4 数据类型 ..................................................................................................................................................... 1-4 1.5 指令一览表 ................................................................................................................................................. 1-5代入指令 ..................................................................................................................................................... 2-1 算数运算指令 ............................................................................................................................................. 2-2 逻辑运算指令 ............................................................................................................................................. 2-7 比较运算指令 ............................................................................................................................................. 2-11 移位指令 ..................................................................................................................................................... 2-17 选择指令 ..................................................................................................................................................... 2-21 数值运算指令 ............................................................................................................................................. 2-27 类型转换指令 ............................................................................................................................................. 2-39定时器与计数器 ......................................................................................................................................... 3-2 触发器(边沿检测) ................................................................................................................................. 3-14 flip-flop(双稳电路) ................................................................................................................................ 3-16 字符串 ......................................................................................................................................................... 3-20 系统时间指令 ............................................................................................................................................. 3-29 EtherCAT通信指令..................................................................................................................................... 3-38 Modbus-RTU/TCP通信指令 ...................................................................................................................... 3-74 HX-CPU专用指令 ...................................................................................................................................... 3-87 通用串行通信指令....................................................................................................................................... 3-1044.1 LD(梯形图逻辑图) ................................................................................................................................ 4-1 4.2 FBD(功能块图)...................................................................................................................................... 4-3 4.3 IL(指令表) ............................................................................................................................................. 4-4 4.4 ST(结构文本)......................................................................................................................................... 4-5 4.5 SFC(顺序控制功能图) .......................................................................................................................... 4-7 4.6 CFC(连续功能图).................................................................................................................................. 4-105.1 概要 ............................................................................................................................................................. 5-1 5.2 POU编辑例 ................................................................................................................................................. 5-2 5.3 库编辑例 ..................................................................................................................................................... 5-7第1章变量与常量用户程序中可以使用半角英文字母数字及日文。
codesys编程手册(上).pdf

IEC 61131-3 编程工具WAGO-I/O-PRO 32用户手册(上)技术描述第1-14章759-122/000-002版本 2.0.0i目录目录1 重要说明 (1)1.1 合法性 (1)1.1.1版权声明 (1)1.1.2 人员资质 (1)1.1.3 使用准备 (1)1.2 警示图标 (1)1.3 特殊字体 (2)1.4 数字表示法 (2)1.5 适用范围 (2)1.6 缩写 (2)1.7 交货内容 (2)1.8 系统配置 (3)1.9 安装 (3)1.10 卸载 (3)1.11 运行 (4)1.12 重要提示 (4)2 WAGO-I/O-PRO 32 V2.2 概述 (5)2.1 WAGO-I/O-PRO 32 软件简介.......................................... .. (5)2.2 WAGO-I/O-PRO 32功能概述............... .. (5)2.2.1 项目结构 (5)2.2.2 创建项目 (5)2.2.3 测试项目 (5)2.2.4 调试 (6)2.2.5 其它在线工具 (6)2.2.6 辅助功能 (6)2.2.7 总结 (6)2.3 项目单元 (6)2.3.1 项目 (6)2.3.2 POU(程序组织单元) (6)2.3.3 功能 (7)2.3.4 功能块 (8)2.3.5 功能块实例 (9)2.3.6 功能块调用 (10)2.3.7 程序 (11)2.3.8 PLC_PRG (13)2.3.9 动作(Action) (13)2.3.10 程序资源 (14)2.3.11 库文件 (14)2.3.12 数据类型 (14)2.3.13 可视化工具 (15)2.4 编程语言 (15)2.4.1 语句表 (IL) (15)目录ii2.4.2 结构化文本语言 (ST) (17)2.4.3 顺序功能图 (SFC) (23)2.4.4 功能块图 (FBD) (29)2.4.5 连续功能块图 (CFC) (29)2.4.6 梯形图 (LD) (29)2.5 调试及在线功能 (31)2.5.1 采样轨迹 (31)2.5.2 调试 (31)2.5.3 断点 (31)2.5.4 单步执行 (32)2.5.5 单循环 (32)2.5.6 在线修改数值 (32)2.5.7 监控 (32)2.5.8 仿真 (33)2.5.9 日志 (33)2.6 标准 (34)3 编程实例 (35)3.1 交通信号灯控制实例 (35)3.1.1 创建 POU (35)3.1.2 TRAFFICSIGNAL 的作用是什么? (35)3.1.3 WAIT 的作用是什么? (35)3.1.4 SEQUENCE 的作用是什么? (35)3.1.5 PLC_PRG 的作用是什么? (35)3.1.6 "TRAFFICSIGNAL" 声明 (36)3.1.7 "TRAFFICSIGNAL" 主体 (36)3.1.8 连接标准库(standard.lib) (38)3.1.9 "WAIT" 声明 (38)3.1.10 "WAIT" 主体 (38)3.1.11 "SEQUENCE" 第一扩展级 (39)3.1.12 创建SFC图表 (40)3.1.13 动作及转换条件 (41)3.1.14 "SEQUENCE" 第二扩展级 (43)3.1.15 结果 (45)3.1.16 PLC_PRG (45)3.1.17 TRAFFICSIGNAL 仿真 (47)3.2 图形化交通信号灯 (47)3.2.1 创建新图形 (47)3.2.2 插入图形元件 (48)3.2.3 其它交通灯 (49)3.2.4 TRAFFICSIGNAL 灯箱 (49)3.2.5 第二个交通信号灯 (49)3.2.6 开关ON (50)3.2.7 图形中的字体 (51)iii目录4 WAGO-I/O-PRO 32 的组成 (53)4.1 主画面 (53)4.1.1 主菜单 (53)4.1.2 工具条 (54)4.1.3 对象管理器 (54)4.1.4 屏幕分隔线 (54)4.1.5 工作区 (55)4.1.6 信息窗口 (55)4.1.7 状态栏 (55)4.1.8 上下文菜单 (56)4.2 选项功能 (56)4.2.1 'Project' 'Options' (56)4.2.2 装载及存储选项 (56)4.2.3 用户信息选项 (58)4.2.4 编辑器选项 (58)4.2.5 桌面选项 (61)4.2.6 颜色选项 (62)4.2.7 目录选项 (63)4.2.8 日志选项 (64)4.2.9 编译选项 (65)4.2.10 密码 (67)4.2.11 源代码下载 (68)4.2.12 符号配置选项 (69)4.2.13 ‘宏’选项 (70)4.3 项目管理 (71)4.3.1 'File' 'New' (71)4.3.2 'File' 'Open' (71)4.3.3 'File' 'Close' (72)4.3.4 'File' 'Save' (72)4.3.5 'File' 'Save as' (72)4.3.6 'File' 'Save/Mail Archive' (73)4.3.7 'File' 'Print' (76)4.3.8 'File' 'Printer setup' (77)4.3.9 'File' 'Exit' (78)4.3.10 'Project' 'Build' (79)4.3.11 'Project' 'Rebuild all' (79)4.3.12 'Project' 'Clean all' (79)4.3.13 'Project' 'Load Download-Information' (80)4.3.14 'Project' 'Translate into another language' (80)4.3.15 'Project' 'Document' (84)4.3.16 'Project' 'Export' (85)4.3.17 'Project' 'Import' (86)4.3.18 'Project' 'Merge' (86)4.3.19 'Project' 'Compare' (87)目录iv4.3.20 'Project' 'Project info' (91)4.3.21 'Project' 'Global Search' (92)4.3.22 'Project' 'Global replace' (93)4.3.23 'Project' 'Check' (93)4.3.24 'Project' 'Passwords for user groups' (95)4.4 项目中的对象管理 (95)4.4.1 对象 (95)4.4.2 文件夹 (96)4.4.3 新文件夹 (97)4.4.4 'Expand nodes' 'Collapse nodes' (97)4.4.5 'Project' 'Object Delete' (97)4.4.6 'Project' 'Object Add' (97)4.4.7 'Project' 'Object Rename' (98)4.4.8 'Project' 'Object Convert' (99)4.4.9 'Project' 'Object Copy' (99)4.4.10 'Project' 'Object Open' (99)4.4.11 'Project' 'Object Access rights' (100)4.4.12 'Project' 'Object properties' (101)4.4.13 'Project' 'Add Action' (101)4.4.14 'Project' 'Open Instance' (101)4.4.15 'Project' 'Show Call Tree' (102)4.4.16 'Projekt' 'Show cross reference' (102)4.5 常规编辑功能 (103)4.5.1 'Edit' 'Undo' (103)4.5.2 'Edit' 'Redo' (104)4.5.3 'Edit' 'Cut' (104)4.5.4 'Edit' 'Copy' (104)4.5.5 'Edit' 'Paste' (105)4.5.6 'Edit' 'Delete" (105)4.5.7 'Edit' 'Find' (106)4.5.8 'Edit' 'Find next' (106)4.5.9 'Edit' 'Replace' (106)4.5.10 'Edit' 'Input Assistant' (107)4.5.11 'Edit''Declare Variable' (110)4.5.12 'Edit' 'Next error'" (110)4.5.13 'Edit' 'Previous error'" (110)4.5.14 'Edit' 'Macros' (110)4.6 通用在线功能 (110)4.6.1 'Online-Change' 功能.... . (110)4.6.2 'Online' 'Login' (111)4.6.3 系统报告 (111)4.6.4 'Online' 'Logout' (112)4.6.5 'Online' 'Download' (112)4.6.6 'Online' 'Run' (113)v目录4.6.7 'Online' 'Stop' (113)4.6.8 'Online' 'Reset' (113)4.6.9 'Online' 'Reset (cold)' (113)4.6.10 'Online' 'Reset (original)' (113)4.6.11 'Online' 'Toggle Breakpoint' (113)4.6.12 'Online' 'Breakpoint Dialog Box' (114)4.6.13 'Online' 'Step over' (115)4.6.14 'Online' 'Step in' (115)4.6.15 'Online' 'Single Cycle' (115)4.6.16 'Online' 'Write values' (115)4.6.17 'Online' 'Force values' (116)4.6.18 'Online' 'Release force' (117)4.6.19 'Online' 'Write/Force' Dialog' (118)4.6.20 'Online' 'Show Call Stack' (119)4.6.21 'Online' 'Flow Control'" (120)4.6.22 'Online' 'Simulation' (120)4.6.23 'Online' 'Communication Parameters' (120)4.6.24 网关系统规则 (121)4.6.25 本地PC机上的通讯参数对话框 (121)4.6.26 设定网关服务器和通道 (122)4.6.27 为本地网关服务器设定一个新通道 (123)4.6.28 在通讯参数对话框编辑参数时的技巧 (125)4.6.29 快速检测网关的错误连接 (125)4.6.30 'Online' 'Sourcecode download' (125)4.6.31 'Online' 'Create bootproject' (125)4.6.32 'Online' 'Write file to controller' (125)4.6.33 'Online' 'Load file from controller' (126)4.7 日志 (126)4.7.1 'Window' 'Log' (126)4.7.2 菜单日志 (127)4.7.3 存储项目日志 (128)4.8 窗口设定 ................................................................................. ................................ . (128)4.8.1 'Window' 'Tile Horizontal' ............................... ........... ................................ (128)4.8.2 'Window' 'Tile Vertical' ................................. ........... ................................ .. (128)4.8.3 'Window' 'Cascade' ...................................... ........... ................................ . (128)4.8.4 'Window' 'Arrange Symbols'................... ........... ................................ (129)4.8.5 'Window' 'Close All' ............................... ........... ................................ (129)4.8.6 'Window' 'Messages' ............................ ........... ................................ (129)4.9 帮助 ..................................................... ........... ................................ . (129)4.9.1 'Help' 'Contents and Index'................... ........... ................................ . (129)4.9.2 主帮助窗口................................ ........... ................................ . (130)4.9.3 索引窗口 ............................... ........... ................................ (131)4.9.4 快速帮助 ..................... ........... ................................ (132)目录vi5 编辑器 (133)5.2 声明编辑器............. ........... ................................ . (134)5.2.1 声明部分............. ........... ................................ (134)5.2.2 输入变量............ ........... ................................ .. (135)5.2.3 输出变量 ......... ........... ................................ (135)5.2.4 输入/输出变量.... ........... ................................ . (135)5.2.5 局部变量....................... ........... ................................ (135)5.2.6 其它变量.................... ........... ................................ . (136)5.2.7 常量,直接数值........ ........... ................................ .. (136)5.2.8 外部变量 ................. ........... ................................ (136)5.2.9 关键字........... ........... ................................ .. (137)5.2.10 变量声明..... ........... ................................ .. (137)5.2.11 AT 声明 ........ ........... ................................ . (138)5.2.12 'Insert' 'Declarations keywords'....... ........... ................................ . (138)5.2.13 'Insert' 'Type' .............................. ........... ................................ (138)5.2.14 语法颜色.................................. ........... ................................ . (138)5.2.15 快捷模式 ............................. ........... ................................ .. (139)5.2.16 自动声明............................... ........... ................................ . (139)5.2.17 声明编辑器中的行号.......... ........... ................................ . (141)5.2.18 表格声明 ............................ ........... ................................ . (141)5.2.19 'Insert' 'New Declaration' ........... ........... ................................ (142)5.2.20 附注指令..................................... ........... ................................ (142)5.2.21 在线模式下的声明编辑器......... ........... ................................ . (145)5.3 文本编辑器.............................. ........... ................................ . (145)5.3.2 IL 编辑器............................. ........... ................................ . (150)5.3.3 ST 编辑器 ...................... ........... ...................... ........... ................................ .. (151)5.4 图形编辑器.............................. ........... ................................ (151)5.4.2 FBD 编辑器 ....................... ........... ................................ .. (153)5.4.3 梯形图编辑器..................... ........... ................................ .. (159)5.4.4 SFC 编辑器 ....................... ........... ................................ .. (164)5.4.5 CFC 编辑器 ...................... ........... ...................... ............... ................................ ................... . (173)6 资源概述 (187)6.1 全局变量 .......................................... ..................... ................................ .. (187)6.1.1 编辑全局变量 ............ ........... ................................................... .. (187)6.1.2 变量表 ......................... ........... . (187)6.1.3 全局变量 .................... ........... ................................................. . (188)6.1.4 全局常量..................... ........... ................................................. (190)6.2 变量................................. ........... ................................................ (190)6.2.1 .Insert' 'All Instance Paths'.............. ............ ....................................... . (191)6.2.2 结构文档 ................................................ .......................... ................................ .. (191)6.3 PLC 浏览器.................................................. .............. ................................ .. (193)6.4 PLC 配置....................................................... ........................ ................................ . (193)6.4.1 PLC 选择.................................................... ........... ............................................. (193)vii目录6.5 任务配置 ....................................................... ........... ................................ (193)6.5.1 哪个任务被处理? .............................. ........... ................................ .. (194)6.5.2 任务配置中的工作..................... ........... ................................ (194)6.5.3 'Insert' 'Insert Task' 或'Insert' 'Append Task'..... ........... ................................ . (195)6.5.4 'Insert' 'Insert Program Call' 或'Insert' 'Append Program Call' .. ........... ....................................... .. (195)6.5.5 'Extras' 'Edit Entry'.................................................... ........... ................................ .. (196)6.5.6 'Extras' 'Set Debug Task'......................................... ........... ................................ . (196)6.6 采样轨迹 ................................................................. ........... ................................ (196)6.6.1 'Extras' 'Trace Configuration'................................ ........... ................................ . (197)6.6.2 'Extra' 'Start Trace' ................................................ ........... ................................ . (198)6.6.3 'Extra' 'Read Trace' ............................................... ........... ................................ .. (198)6.6.4 'Extra' 'Auto Read'............................................... ........... ................................ . (198)6.6.5 'Extra' 'Stop Trace' ............................................. ........... ................................ .. (198)6.6.6 显示变量的选择................. ........... ................................ . (199)6.6.7 采样轨迹的显示 ............... ........... ................................ (199)6.6.8 'Extras' 'Cursor Mode' ............. ........... ................................ . (200)6.6.9 'Extras' 'Multi Channel' ............ ........... ................................ (200)6.6.10 'Extras' 'Show grid'................... ........... ................................ . (200)6.6.11 'Extras' 'Y Scaling' ................... ........... ................................ .. (200)6.6.12 'Extras' 'Stretch'......................... ........... ................................ . (201)6.6.13 'Extras' 'Compress' ..................... ........... ................................ .. (201)6.6.14 'Extras' 'Save Trace' ........................ ........... ................................ .......................................................... ..201 6.6.15 'Extras' 'Load Trace'......................... ........... ................................ .. (201)6.6.16 'Extras' 'Trace in ASCII-file'............ ........... ................................ .......................................................... .201 6.7 监视及配方管理器.............................. ........... ................................ ....................................................... ..202 6.7.1监视及配方管理器.............................. ........... ................................ .................................................... ..202 6.7.2 离线模式下的监视及配方管理器.... ........... ................................ ................................................. (202)6.7.3 'Insert' 'New Watch List' ..................... ........... ................................ ........................................................ ..203 6.7.4 'Extras' 'Rename Watch List' ............... ........... ................................ ................................................. . (203)6.7.5 'Extras' 'Save Watch List'..................... ........... ................................ (203)6.7.6 'Extras' 'Load Watch List' ..................... ........... ................................ ................................................. (203)6.7.7 在线模式下的监视及配方管理器......... ........... ................................ ........................................... . (203)6.7.8 'Extra' 'Monitoring Active'........................ ........... ................................ ............................................... .. (204)6.7.9 'Extras' 'Write Receipt'.............................. ........... ................................ ................................................ . (204)6.7.10 'Extras' 'Read Receipt'............................. ........... ................................ ............................................. . (205)6.7.11 强制数值................................................. ........... ................................ .......................................... ... . (205)7 库管理器 .................................................................................................................................. .. (207)7.1 使用库管理器............................................. ........... ................................ ............................................ . (207)7.2 标准库 ....................................................... ........... ................................ ........................................... (208)7.3 用户自定义库 ............................................. ........... ................................ ......................................... . (208)7.4 'Insert' 'Additional Library'.............................. ........... ................................ ................... ......................... .. (208)7.5 删除库 .......................................................... ........... ................................ ..................................... . (208)目录viii8 可视化组件 (209)8.1 可视化组件.................................................. ........... ................................ . (209)8.2 创建可视化组件.................................... ........... ................................ .. (210)8.2.1可视化组件单元,插入....................... ........... ................................ .. (210)8.2.2 作用于可视化单元......................... ........... ................................ . (211)8.2.3 可视化组件单元,配置................ ........... ................................ .. (212)8.2.4 其它可视化组件单元功能........... ........... ................................ . (222)9 DDE接口 (229)9.1通过DDE与WAGO-I/O-PRO 32进行通讯........................................................................... .229 9.2 WAGO-I/O-PRO 32编程系统的DDE接口........................................................................... .229 9.2.1 启动DDE接口 (229)9.2.2 访问数据的途径 (229)9.2.3 哪些变量可被读取? (230)9.2.4 使用WORD软件链接变量……………………………………………………………………………… .230 9.2.5 使用EXCEL软件链接变量……………………………………………………………………………… .230 9.2.6 通过Intouch软件访问变量……………………………………………………………………………… ..23010 键盘命令 (231)10.1 键盘的使用 ............ ........... ................................ .. (231)10.2 组合键 ................................ .. ........... ................................ ....... (231)11 数据类型 (235)11.1 标准数据类型......... .. ........... ................................ .. (235)11.2 定义数据类型........ .. ........... ................................ . (236)12 IEC 运算符 (245)12.1 IEC 操作符 ....... .. ........... ................................ (245)12.2 算术操作符.......... .. ........... ................................ .. (245)12.2.1 ADD....................... .. ........... ................................ .. (245)12.2.2 MUL ...................... .. ........... ................................ .. (245)12.2.3 SUB........................ .. ........... ................................ .. (246)12.2.4 DIV.......................... .. ........... ................................ . (246)12.2.5 MOD......................... .. ........... ................................ .. (247)12.2.6 INDEXOF.................. .. ........... ................................ . (248)12.2.7 SIZEOF......................... .. ........... ................................ . (248)12.3 位字符串操作符............... .. ........... ................................ .. (248)12.3.1 AND...................................................................... ........... ................................ .. (248)12.3.2 OR...................................................... .. ........... ................................ .. (249)12.3.3 XOR................................................... .. ........... ................................ .. (250)12.3.4 NOT...................................................... .. ........... ................................ .. (250)12.4 位移操作符............................................. .. ........... ................................ .. (251)12.4.1 SHL.......................................................... .. ........... ................................ . (251)12.4.2 SHR............................................................ .. ........... ................................ .. (252)ix目录12.4.3 ROL .............................................................. .. ........... ................................ .. (253)12.4.4 ROR (253)12.5 选择操作符........................................................... .. (254)12.5.1 SEL .................................................................... (255)12.5.2 MAX................................................................... (255)12.5.3 MIN................................................................... . (256)12.5.4 LIMIT ............................................................... . (256)12.5.5 MUX.................................................................. (257)12.6 比较操作符 ......................................................... . (257)12.6.1 GT........................................................................ . (257)12.6.2 LT ......................................................................... (258)12.6.3 LE ........................................................................ . (258)12.6.4 GE.......................................................................... .. (259)12.6.5 EQ.......................................................................... .. (259)12.6.6 NE.......................................................................... .. (260)12.7 地址操作符............................................................. (260)12.7.1 ADR........................................................................ . (260)12.7.2 容量操作符 .......................................................... .. (261)12.8 调用操作符................................................................ .. (261)12.8.1 CAL .......................................................................... .. (261)12.9 类型转换功能 (261)12.9.1 BOOL_TO转换 (262)12.9.2 TO_BOOL转换 (263)12.9.3 整数类形之间的转换 (264)12.9.4 REAL_TO转换 (264)12.9.5 TIME_TO/TIME_OF_DAY转换 (265)12.9.6 DATE_TO/DT_TO转换 (266)12.9.7 STRING_TO转换..................... (266)12.9.8 TRUNC........................................... . (266)12.10 数字功能.......................................... (267)12.10.1 ABS................................................. (267)12.10.2 SQRT.................................................... (267)12.10.3 LN........................................................... . (268)12.10.4 LOG......................................................... (268)12.10.5 EXP............................................................ . (269)12.10.6 SIN.................................................................... (269)12.10.7 COS................................................................ (270)12.10.8 TAN............................................................... (270)12.10.9 ASIN.............................................................. (270)12.10.10 ACOS.......................................................... (271)12.10.11 ATAN ........................................................ . (271)12.10.12 EXPT .. (272)目录x13.标准库中的元素 (273)13.1字符串功能 (273)13.1.1L E N (273)13.1.2L E F T (273)13.1.3R I G H T (274)13.1.4M I D (274)13.1.5C O N C A T (275)13.1.6I N S E R T (276)13.1.7D E L E T E (276)13.1.8R E P L A C E (277)13.1.9F I N D (278)13.2双稳态功能块 (278)13.2.1S R (278)13.2.2R S (279)13.2.3S E M A (280)13.3触发器 (281)13.3.1R_T R I G (281)13.3.2F_T R I G (281)13.4计数器 (282)13.4.1C T U (283)13.4.2C T D (283)13.4.3C T U D (284)13.5定时器 (285)13.5.1T P (285)13.5.2T O N (286)13.5.3T O F (287)14U T I L.L I B库 (289)14.1U T I L.L I B库 (289)14.2B C D转换 (289)14.2.1B C D_T O_I N T (289)14.2.2I N T_T O_B C D_ (289)14.3位/字节功能 (290)14.3.1E X T R A C T (290)14.3.2P A C K (290)14.3.3P U T B I T (290)14.3.4U N P A C K (290)14.4数学运算 (291)14.4.1D E R I V A T I V E (291)14.4.2I N T E G R A L (291)14.4.3S T A T I S T I C S_I N T (292)14.4.4S T A T I S T I C S_R E A L (292)14.4.5V A R I A N C E (292)14.5调节器 (292)xi目录14.5.1P (292)14.5.2P D (293)14.5.3P I D (293)14.6信号发生器 (294)14.6.1B L I N K (294)14.6.2G E N (294)14.7功能处理器 (296)14.7.1C H A R C U R V E (296)14.7.2R A M P_I N T (297)14.7.3R A M P_R E A L (297)14.8模拟数值处理 (297)14.8.1H Y S T E R E S I S (298)14.8.2L I M I T A L A R M (298)索引 (299)15章节及附录的内容请参看第二部分。
codesys编程手册(上)

IEC 61131-3 编程工具WAGO-I/O-PRO 32用户手册(上)技术描述第1-14章759-122/000-002版本 2.0.0i目录目录1 重要说明 (1)1.1 合法性 (1)1.1.1版权声明 (1)1.1.2 人员资质 (1)1.1.3 使用准备 (1)1.2 警示图标 (1)1.3 特殊字体 (2)1.4 数字表示法 (2)1.5 适用范围 (2)1.6 缩写 (2)1.7 交货内容 (2)1.8 系统配置 (3)1.9 安装 (3)1.10 卸载 (3)1.11 运行 (4)1.12 重要提示 (4)2 WAGO-I/O-PRO 32 V2.2 概述 (5)2.1 WAGO-I/O-PRO 32 软件简介.......................................... .. (5)2.2 WAGO-I/O-PRO 32功能概述............... .. (5)2.2.1 项目结构 (5)2.2.2 创建项目 (5)2.2.3 测试项目 (5)2.2.4 调试 (6)2.2.5 其它在线工具 (6)2.2.6 辅助功能 (6)2.2.7 总结 (6)2.3 项目单元 (6)2.3.1 项目 (6)2.3.2 POU(程序组织单元) (6)2.3.3 功能 (7)2.3.4 功能块 (8)2.3.5 功能块实例 (9)2.3.6 功能块调用 (10)2.3.7 程序 (11)2.3.8 PLC_PRG (13)2.3.9 动作(Action) (13)2.3.10 程序资源 (14)2.3.11 库文件 (14)2.3.12 数据类型 (14)2.3.13 可视化工具 (15)2.4 编程语言 (15)2.4.1 语句表 (IL) (15)目录ii2.4.2 结构化文本语言 (ST) (17)2.4.3 顺序功能图 (SFC) (23)2.4.4 功能块图 (FBD) (29)2.4.5 连续功能块图 (CFC) (29)2.4.6 梯形图 (LD) (29)2.5 调试及在线功能 (31)2.5.1 采样轨迹 (31)2.5.2 调试 (31)2.5.3 断点 (31)2.5.4 单步执行 (32)2.5.5 单循环 (32)2.5.6 在线修改数值 (32)2.5.7 监控 (32)2.5.8 仿真 (33)2.5.9 日志 (33)2.6 标准 (34)3 编程实例 (35)3.1 交通信号灯控制实例 (35)3.1.1 创建 POU (35)3.1.2 TRAFFICSIGNAL 的作用是什么? (35)3.1.3 WAIT 的作用是什么? (35)3.1.4 SEQUENCE 的作用是什么? (35)3.1.5 PLC_PRG 的作用是什么? (35)3.1.6 "TRAFFICSIGNAL" 声明 (36)3.1.7 "TRAFFICSIGNAL" 主体 (36)3.1.8 连接标准库(standard.lib) (38)3.1.9 "WAIT" 声明 (38)3.1.10 "WAIT" 主体 (38)3.1.11 "SEQUENCE" 第一扩展级 (39)3.1.12 创建SFC图表 (40)3.1.13 动作及转换条件 (41)3.1.14 "SEQUENCE" 第二扩展级 (43)3.1.15 结果 (45)3.1.16 PLC_PRG (45)3.1.17 TRAFFICSIGNAL 仿真 (47)3.2 图形化交通信号灯 (47)3.2.1 创建新图形 (47)3.2.2 插入图形元件 (48)3.2.3 其它交通灯 (49)3.2.4 TRAFFICSIGNAL 灯箱 (49)3.2.5 第二个交通信号灯 (49)3.2.6 开关ON (50)3.2.7 图形中的字体 (51)iii目录4 WAGO-I/O-PRO 32 的组成 (53)4.1 主画面 (53)4.1.1 主菜单 (53)4.1.2 工具条 (54)4.1.3 对象管理器 (54)4.1.4 屏幕分隔线 (54)4.1.5 工作区 (55)4.1.6 信息窗口 (55)4.1.7 状态栏 (55)4.1.8 上下文菜单 (56)4.2 选项功能 (56)4.2.1 'Project' 'Options' (56)4.2.2 装载及存储选项 (56)4.2.3 用户信息选项 (58)4.2.4 编辑器选项 (58)4.2.5 桌面选项 (61)4.2.6 颜色选项 (62)4.2.7 目录选项 (63)4.2.8 日志选项 (64)4.2.9 编译选项 (65)4.2.10 密码 (67)4.2.11 源代码下载 (68)4.2.12 符号配置选项 (69)4.2.13 ‘宏’选项 (70)4.3 项目管理 (71)4.3.1 'File' 'New' (71)4.3.2 'File' 'Open' (71)4.3.3 'File' 'Close' (72)4.3.4 'File' 'Save' (72)4.3.5 'File' 'Save as' (72)4.3.6 'File' 'Save/Mail Archive' (73)4.3.7 'File' 'Print' (76)4.3.8 'File' 'Printer setup' (77)4.3.9 'File' 'Exit' (78)4.3.10 'Project' 'Build' (79)4.3.11 'Project' 'Rebuild all' (79)4.3.12 'Project' 'Clean all' (79)4.3.13 'Project' 'Load Download-Information' (80)4.3.14 'Project' 'Translate into another language' (80)4.3.15 'Project' 'Document' (84)4.3.16 'Project' 'Export' (85)4.3.17 'Project' 'Import' (86)4.3.18 'Project' 'Merge' (86)4.3.19 'Project' 'Compare' (87)目录iv4.3.20 'Project' 'Project info' (91)4.3.21 'Project' 'Global Search' (92)4.3.22 'Project' 'Global replace' (93)4.3.23 'Project' 'Check' (93)4.3.24 'Project' 'Passwords for user groups' (95)4.4 项目中的对象管理 (95)4.4.1 对象 (95)4.4.2 文件夹 (96)4.4.3 新文件夹 (97)4.4.4 'Expand nodes' 'Collapse nodes' (97)4.4.5 'Project' 'Object Delete' (97)4.4.6 'Project' 'Object Add' (97)4.4.7 'Project' 'Object Rename' (98)4.4.8 'Project' 'Object Convert' (99)4.4.9 'Project' 'Object Copy' (99)4.4.10 'Project' 'Object Open' (99)4.4.11 'Project' 'Object Access rights' (100)4.4.12 'Project' 'Object properties' (101)4.4.13 'Project' 'Add Action' (101)4.4.14 'Project' 'Open Instance' (101)4.4.15 'Project' 'Show Call Tree' (102)4.4.16 'Projekt' 'Show cross reference' (102)4.5 常规编辑功能 (103)4.5.1 'Edit' 'Undo' (103)4.5.2 'Edit' 'Redo' (104)4.5.3 'Edit' 'Cut' (104)4.5.4 'Edit' 'Copy' (104)4.5.5 'Edit' 'Paste' (105)4.5.6 'Edit' 'Delete" (105)4.5.7 'Edit' 'Find' (106)4.5.8 'Edit' 'Find next' (106)4.5.9 'Edit' 'Replace' (106)4.5.10 'Edit' 'Input Assistant' (107)4.5.11 'Edit''Declare Variable' (110)4.5.12 'Edit' 'Next error'" (110)4.5.13 'Edit' 'Previous error'" (110)4.5.14 'Edit' 'Macros' (110)4.6 通用在线功能 (110)4.6.1 'Online-Change' 功能.... . (110)4.6.2 'Online' 'Login' (111)4.6.3 系统报告 (111)4.6.4 'Online' 'Logout' (112)4.6.5 'Online' 'Download' (112)4.6.6 'Online' 'Run' (113)v目录4.6.7 'Online' 'Stop' (113)4.6.8 'Online' 'Reset' (113)4.6.9 'Online' 'Reset (cold)' (113)4.6.10 'Online' 'Reset (original)' (113)4.6.11 'Online' 'Toggle Breakpoint' (113)4.6.12 'Online' 'Breakpoint Dialog Box' (114)4.6.13 'Online' 'Step over' (115)4.6.14 'Online' 'Step in' (115)4.6.15 'Online' 'Single Cycle' (115)4.6.16 'Online' 'Write values' (115)4.6.17 'Online' 'Force values' (116)4.6.18 'Online' 'Release force' (117)4.6.19 'Online' 'Write/Force' Dialog' (118)4.6.20 'Online' 'Show Call Stack' (119)4.6.21 'Online' 'Flow Control'" (120)4.6.22 'Online' 'Simulation' (120)4.6.23 'Online' 'Communication Parameters' (120)4.6.24 网关系统规则 (121)4.6.25 本地PC机上的通讯参数对话框 (121)4.6.26 设定网关服务器和通道 (122)4.6.27 为本地网关服务器设定一个新通道 (123)4.6.28 在通讯参数对话框编辑参数时的技巧 (125)4.6.29 快速检测网关的错误连接 (125)4.6.30 'Online' 'Sourcecode download' (125)4.6.31 'Online' 'Create bootproject' (125)4.6.32 'Online' 'Write file to controller' (125)4.6.33 'Online' 'Load file from controller' (126)4.7 日志 (126)4.7.1 'Window' 'Log' (126)4.7.2 菜单日志 (127)4.7.3 存储项目日志 (128)4.8 窗口设定 ................................................................................. ................................ . (128)4.8.1 'Window' 'Tile Horizontal' ............................... ........... ................................ (128)4.8.2 'Window' 'Tile Vertical' ................................. ........... ................................ .. (128)4.8.3 'Window' 'Cascade' ...................................... ........... ................................ . (128)4.8.4 'Window' 'Arrange Symbols'................... ........... ................................ (129)4.8.5 'Window' 'Close All' ............................... ........... ................................ (129)4.8.6 'Window' 'Messages' ............................ ........... ................................ (129)4.9 帮助 ..................................................... ........... ................................ . (129)4.9.1 'Help' 'Contents and Index'................... ........... ................................ . (129)4.9.2 主帮助窗口................................ ........... ................................ . (130)4.9.3 索引窗口 ............................... ........... ................................ (131)4.9.4 快速帮助 ..................... ........... ................................ (132)目录vi5 编辑器 (133)5.2 声明编辑器............. ........... ................................ . (134)5.2.1 声明部分............. ........... ................................ (134)5.2.2 输入变量............ ........... ................................ .. (135)5.2.3 输出变量 ......... ........... ................................ (135)5.2.4 输入/输出变量.... ........... ................................ . (135)5.2.5 局部变量....................... ........... ................................ (135)5.2.6 其它变量.................... ........... ................................ . (136)5.2.7 常量,直接数值........ ........... ................................ .. (136)5.2.8 外部变量 ................. ........... ................................ (136)5.2.9 关键字........... ........... ................................ .. (137)5.2.10 变量声明..... ........... ................................ .. (137)5.2.11 AT 声明 ........ ........... ................................ . (138)5.2.12 'Insert' 'Declarations keywords'....... ........... ................................ . (138)5.2.13 'Insert' 'Type' .............................. ........... ................................ (138)5.2.14 语法颜色.................................. ........... ................................ . (138)5.2.15 快捷模式 ............................. ........... ................................ .. (139)5.2.16 自动声明............................... ........... ................................ . (139)5.2.17 声明编辑器中的行号.......... ........... ................................ . (141)5.2.18 表格声明 ............................ ........... ................................ . (141)5.2.19 'Insert' 'New Declaration' ........... ........... ................................ (142)5.2.20 附注指令..................................... ........... ................................ (142)5.2.21 在线模式下的声明编辑器......... ........... ................................ . (145)5.3 文本编辑器.............................. ........... ................................ . (145)5.3.2 IL 编辑器............................. ........... ................................ . (150)5.3.3 ST 编辑器 ...................... ........... ...................... ........... ................................ .. (151)5.4 图形编辑器.............................. ........... ................................ (151)5.4.2 FBD 编辑器 ....................... ........... ................................ .. (153)5.4.3 梯形图编辑器..................... ........... ................................ .. (159)5.4.4 SFC 编辑器 ....................... ........... ................................ .. (164)5.4.5 CFC 编辑器 ...................... ........... ...................... ............... ................................ ................... . (173)6 资源概述 (187)6.1 全局变量 .......................................... ..................... ................................ .. (187)6.1.1 编辑全局变量 ............ ........... ................................................... .. (187)6.1.2 变量表 ......................... ........... . (187)6.1.3 全局变量 .................... ........... ................................................. . (188)6.1.4 全局常量..................... ........... ................................................. (190)6.2 变量................................. ........... ................................................ (190)6.2.1 .Insert' 'All Instance Paths'.............. ............ ....................................... . (191)6.2.2 结构文档 ................................................ .......................... ................................ .. (191)6.3 PLC 浏览器.................................................. .............. ................................ .. (193)6.4 PLC 配置....................................................... ........................ ................................ . (193)6.4.1 PLC 选择.................................................... ........... ............................................. (193)vii目录6.5 任务配置 ....................................................... ........... ................................ (193)6.5.1 哪个任务被处理? .............................. ........... ................................ .. (194)6.5.2 任务配置中的工作..................... ........... ................................ (194)6.5.3 'Insert' 'Insert Task' 或'Insert' 'Append Task'..... ........... ................................ . (195)6.5.4 'Insert' 'Insert Program Call' 或'Insert' 'Append Program Call' .. ........... ....................................... .. (195)6.5.5 'Extras' 'Edit Entry'.................................................... ........... ................................ .. (196)6.5.6 'Extras' 'Set Debug Task'......................................... ........... ................................ . (196)6.6 采样轨迹 ................................................................. ........... ................................ (196)6.6.1 'Extras' 'Trace Configuration'................................ ........... ................................ . (197)6.6.2 'Extra' 'Start Trace' ................................................ ........... ................................ . (198)6.6.3 'Extra' 'Read Trace' ............................................... ........... ................................ .. (198)6.6.4 'Extra' 'Auto Read'............................................... ........... ................................ . (198)6.6.5 'Extra' 'Stop Trace' ............................................. ........... ................................ .. (198)6.6.6 显示变量的选择................. ........... ................................ . (199)6.6.7 采样轨迹的显示 ............... ........... ................................ (199)6.6.8 'Extras' 'Cursor Mode' ............. ........... ................................ . (200)6.6.9 'Extras' 'Multi Channel' ............ ........... ................................ (200)6.6.10 'Extras' 'Show grid'................... ........... ................................ . (200)6.6.11 'Extras' 'Y Scaling' ................... ........... ................................ .. (200)6.6.12 'Extras' 'Stretch'......................... ........... ................................ . (201)6.6.13 'Extras' 'Compress' ..................... ........... ................................ .. (201)6.6.14 'Extras' 'Save Trace' ........................ ........... ................................ .......................................................... ..201 6.6.15 'Extras' 'Load Trace'......................... ........... ................................ .. (201)6.6.16 'Extras' 'Trace in ASCII-file'............ ........... ................................ .......................................................... .201 6.7 监视及配方管理器.............................. ........... ................................ ....................................................... ..202 6.7.1监视及配方管理器.............................. ........... ................................ .................................................... ..202 6.7.2 离线模式下的监视及配方管理器.... ........... ................................ ................................................. (202)6.7.3 'Insert' 'New Watch List' ..................... ........... ................................ ........................................................ ..203 6.7.4 'Extras' 'Rename Watch List' ............... ........... ................................ ................................................. . (203)6.7.5 'Extras' 'Save Watch List'..................... ........... ................................ (203)6.7.6 'Extras' 'Load Watch List' ..................... ........... ................................ ................................................. (203)6.7.7 在线模式下的监视及配方管理器......... ........... ................................ ........................................... . (203)6.7.8 'Extra' 'Monitoring Active'........................ ........... ................................ ............................................... .. (204)6.7.9 'Extras' 'Write Receipt'.............................. ........... ................................ ................................................ . (204)6.7.10 'Extras' 'Read Receipt'............................. ........... ................................ ............................................. . (205)6.7.11 强制数值................................................. ........... ................................ .......................................... ... . (205)7 库管理器 .................................................................................................................................. .. (207)7.1 使用库管理器............................................. ........... ................................ ............................................ . (207)7.2 标准库 ....................................................... ........... ................................ ........................................... (208)7.3 用户自定义库 ............................................. ........... ................................ ......................................... . (208)7.4 'Insert' 'Additional Library'.............................. ........... ................................ ................... ......................... .. (208)7.5 删除库 .......................................................... ........... ................................ ..................................... . (208)目录viii8 可视化组件 (209)8.1 可视化组件.................................................. ........... ................................ . (209)8.2 创建可视化组件.................................... ........... ................................ .. (210)8.2.1可视化组件单元,插入....................... ........... ................................ .. (210)8.2.2 作用于可视化单元......................... ........... ................................ . (211)8.2.3 可视化组件单元,配置................ ........... ................................ .. (212)8.2.4 其它可视化组件单元功能........... ........... ................................ . (222)9 DDE接口 (229)9.1通过DDE与WAGO-I/O-PRO 32进行通讯........................................................................... .229 9.2 WAGO-I/O-PRO 32编程系统的DDE接口........................................................................... .229 9.2.1 启动DDE接口 (229)9.2.2 访问数据的途径 (229)9.2.3 哪些变量可被读取? (230)9.2.4 使用WORD软件链接变量……………………………………………………………………………… .230 9.2.5 使用EXCEL软件链接变量……………………………………………………………………………… .230 9.2.6 通过Intouch软件访问变量……………………………………………………………………………… ..23010 键盘命令 (231)10.1 键盘的使用 ............ ........... ................................ .. (231)10.2 组合键 ................................ .. ........... ................................ ....... (231)11 数据类型 (235)11.1 标准数据类型......... .. ........... ................................ .. (235)11.2 定义数据类型........ .. ........... ................................ . (236)12 IEC 运算符 (245)12.1 IEC 操作符 ....... .. ........... ................................ (245)12.2 算术操作符.......... .. ........... ................................ .. (245)12.2.1 ADD....................... .. ........... ................................ .. (245)12.2.2 MUL ...................... .. ........... ................................ .. (245)12.2.3 SUB........................ .. ........... ................................ .. (246)12.2.4 DIV.......................... .. ........... ................................ . (246)12.2.5 MOD......................... .. ........... ................................ .. (247)12.2.6 INDEXOF.................. .. ........... ................................ . (248)12.2.7 SIZEOF......................... .. ........... ................................ . (248)12.3 位字符串操作符............... .. ........... ................................ .. (248)12.3.1 AND...................................................................... ........... ................................ .. (248)12.3.2 OR...................................................... .. ........... ................................ .. (249)12.3.3 XOR................................................... .. ........... ................................ .. (250)12.3.4 NOT...................................................... .. ........... ................................ .. (250)12.4 位移操作符............................................. .. ........... ................................ .. (251)12.4.1 SHL.......................................................... .. ........... ................................ . (251)12.4.2 SHR............................................................ .. ........... ................................ .. (252)ix目录12.4.3 ROL .............................................................. .. ........... ................................ .. (253)12.4.4 ROR (253)12.5 选择操作符........................................................... .. (254)12.5.1 SEL .................................................................... (255)12.5.2 MAX................................................................... (255)12.5.3 MIN................................................................... . (256)12.5.4 LIMIT ............................................................... . (256)12.5.5 MUX.................................................................. (257)12.6 比较操作符 ......................................................... . (257)12.6.1 GT........................................................................ . (257)12.6.2 LT ......................................................................... (258)12.6.3 LE ........................................................................ . (258)12.6.4 GE.......................................................................... .. (259)12.6.5 EQ.......................................................................... .. (259)12.6.6 NE.......................................................................... .. (260)12.7 地址操作符............................................................. (260)12.7.1 ADR........................................................................ . (260)12.7.2 容量操作符 .......................................................... .. (261)12.8 调用操作符................................................................ .. (261)12.8.1 CAL .......................................................................... .. (261)12.9 类型转换功能 (261)12.9.1 BOOL_TO转换 (262)12.9.2 TO_BOOL转换 (263)12.9.3 整数类形之间的转换 (264)12.9.4 REAL_TO转换 (264)12.9.5 TIME_TO/TIME_OF_DAY转换 (265)12.9.6 DATE_TO/DT_TO转换 (266)12.9.7 STRING_TO转换..................... (266)12.9.8 TRUNC........................................... . (266)12.10 数字功能.......................................... (267)12.10.1 ABS................................................. (267)12.10.2 SQRT.................................................... (267)12.10.3 LN........................................................... . (268)12.10.4 LOG......................................................... (268)12.10.5 EXP............................................................ . (269)12.10.6 SIN.................................................................... (269)12.10.7 COS................................................................ (270)12.10.8 TAN............................................................... (270)12.10.9 ASIN.............................................................. (270)12.10.10 ACOS.......................................................... (271)12.10.11 ATAN ........................................................ . (271)12.10.12 EXPT .. (272)目录x13.标准库中的元素 (273)13.1字符串功能 (273)13.1.1L E N (273)13.1.2L E F T (273)13.1.3R I G H T (274)13.1.4M I D (274)13.1.5C O N C A T (275)13.1.6I N S E R T (276)13.1.7D E L E T E (276)13.1.8R E P L A C E (277)13.1.9F I N D (278)13.2双稳态功能块 (278)13.2.1S R (278)13.2.2R S (279)13.2.3S E M A (280)13.3触发器 (281)13.3.1R_T R I G (281)13.3.2F_T R I G (281)13.4计数器 (282)13.4.1C T U (283)13.4.2C T D (283)13.4.3C T U D (284)13.5定时器 (285)13.5.1T P (285)13.5.2T O N (286)13.5.3T O F (287)14U T I L.L I B库 (289)14.1U T I L.L I B库 (289)14.2B C D转换 (289)14.2.1B C D_T O_I N T (289)14.2.2I N T_T O_B C D_ (289)14.3位/字节功能 (290)14.3.1E X T R A C T (290)14.3.2P A C K (290)14.3.3P U T B I T (290)14.3.4U N P A C K (290)14.4数学运算 (291)14.4.1D E R I V A T I V E (291)14.4.2I N T E G R A L (291)14.4.3S T A T I S T I C S_I N T (292)14.4.4S T A T I S T I C S_R E A L (292)14.4.5V A R I A N C E (292)14.5调节器 (292)xi目录14.5.1P (292)14.5.2P D (293)14.5.3P I D (293)14.6信号发生器 (294)14.6.1B L I N K (294)14.6.2G E N (294)14.7功能处理器 (296)14.7.1C H A R C U R V E (296)14.7.2R A M P_I N T (297)14.7.3R A M P_R E A L (297)14.8模拟数值处理 (297)14.8.1H Y S T E R E S I S (298)14.8.2L I M I T A L A R M (298)索引 (299)15章节及附录的内容请参看第二部分。
CoDeSys SoftMotion 运动控制中文编程手册

CoDeSys SoftMotion ...................................................................................................................1 CoDeSys SoftMotion – 逻辑控制与运动控制的完美集成.........................................................2 CoDeSys SoftMotion 包括:................................................................................................2 支持的驱动器产品:...............................................................................................................3 CoDeSys SoftMotion 组件化的概念.............................................................................................4 CoDeSys SoftMotion 驱动界面 .............................................................................................5 作为自由驱动设备的配置 .......................................................................................6 已连接的驱动设备的配置 .......................................................................................6 电子凸轮(CAM)编辑器......................................................................................................7 SoftMotion 电子凸轮(盘)的定义 ..............................................................................7 创建电子凸轮(盘).......................................................................................................9 编辑电子凸轮...................................................................................................................9 编译电子凸轮.................................................................................................................15 使用电子凸轮-常用提示 .......................................................................................................15 模块参数的作用.............................................................................................................15 电子凸轮间的切换.........................................................................................................18 CAM :成员属性..................................................................................................................21 CAM 数据结构 ......................................................................................................................22 数据结构简要介绍.........................................................................................................22
全球领先的 PLC 编程工具 CoDeSys 中文编程手册

3.CoDeSys V3 – 快速入门 ...............................................................................................17
使用 CoDeSys V3 来编写一个控制车库门的程序 ...........................................................17 CoDeSys V3 – 快速学习 1/6 .............................................................................................17 CoDeSys V3 – 快速学习 2/6.............................................................................................18 CoDeSys V3 – 快速学习 3/6 .............................................................................................21 CoDeSys V3 – 快速学习 4/6 .............................................................................................22 CoDeSys V3 – 快速学习 5/6 .............................................................................................26 CoDeSys V3 – 快速学习 6/6 .............................................................................................28 下载基于 CoDeSys V3 的整个工程的应用程序 ...............................................................32
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由以下元素组成:
o
PLCopen 功能块依照 PLCopen 标准,可以简单地实现一个单轴运动的控 制,也可以使得两个轴的同步运动。除了库元素状态检测、参数化及一般操 作外,还有些功能块用来设定轴相关的速度定义及加速度参数等。如果两个 轴需要同步,一个轴做为主轴并按照一定的规则控制第二个轴(从轴)。这 个规则既可以是一个使用相关 POU 的电子凸轮, 使从轴连接到主轴。 此外, 有些功能块支持电子齿轮功能和相位移动功能。 几个特有的运动控制功能块。 驱动界面基本驱动器功能块 (AXIS_REF, AXIS_REF_VIRTUAL, AXIS_REF_MAPPING) 通用功能:例如文件复位或错误报告 实现特殊功能驱动器的功能块:基本功能块可以被更多的特殊驱动器扩展, 其可以与一个特定的驱动类型进行通讯。
CoDeSys SoftMotion
CoDeSys SoftMotion ...................................................................................................................1 CoDeSys SoftMotion – 逻辑控制与运动控制的完美集成.........................................................2 CoDeSys SoftMotion 包括:................................................................................................2 支持的驱动器产品:...............................................................................................................3 CoDeSys SoftMotion 组件化的概念.............................................................................................4 CoDeSys SoftMotion 驱动界面 .............................................................................................5 作为自由驱动设备的配置 .......................................................................................6 已连接的驱动设备的配置 .......................................................................................6 电子凸轮(CAM)编辑器......................................................................................................7 SoftMotion 电子凸轮(盘)的定义 ..............................................................................7 创建电子凸轮(盘).......................................................................................................9 编辑电子凸轮...................................................................................................................9 编译电子凸轮.................................................................................................................15 使用电子凸轮-常用提示 .......................................................................................................15 模块参数的作用.............................................................................................................15 电子凸轮间的切换.........................................................................................................18 CAM :成员属性..................................................................................................................21 CAM 数据结构 ......................................................................................................................22 数据结构简要介绍.........................................................................................................22
驱动配置
该配置提供了一个编辑器用来导入的结构和驱动-硬件配置到 CoDeSys 用户界面 中。因此,驱动界面库中的函数将会创建 IEC 数据结构作为该驱动的抽象表示。例 如,IEC 程序员不需要做任何的额外工作,驱动界面都会自动地与驱动器设备进行 通讯,并且能处理该驱动器数据结构及完成传输更新数据。为了控制驱动器,IEC 程序可以有两种方式访问其抽象的数据结构,通过使用 SoftMotion 库的标准模块 (SM3_Basic.library, SM3_CNC.library),或者通过使用由 IEC 程序员为此目的 而创建的模块。由此,目标值会被周期性地输出;这就意味着,在每个 IEC 任务中 会在每次循环中都计算一次目标值(如位置,速度,加速度等),并将目标值从驱 动界面传输给驱动器。去“教会”驱动(例如只给定一个最终位置,驱动将会主动 地运动并报告它的到达)是不可能的。原因是当一个指令被执行时,中央控制器对 于驱动是没有任何影响的。因此,它不太可能实现例如对多轴的协调动作控制。
PLC 中的闭环位置
集成在 CAM 编辑器中的运动规划
CoDeSys SoftMotion 组件化的概念
CoDeSys SoftMotion 能够使用户高效地实现运动控制而无需了解其烦琐的底层细节:从 简单的单轴运动或电子凸轮到多维的复杂运动控制。主要的应用不仅可集中在运动功能特 性,而且还集中在序列和过程控制以及相关的功能,使得运动控制应用与 CoDeSys 开发环 境融为一体。程序逻辑完全由 PLC 程序处理完成,其中纯粹的运动控制则由调用库函数执 行。 CoDeSys SoftMotion 是一个软件工具包,它是运动控制器开发及实时的运行环境。除了 包含 CoDeSys 和 CoDeSys Control 的标准特性外,其还包含了运动控制器所特有的部分:
CoDeSys SoftMotion – 逻辑控制与运动 控制的完美集成
将运动控制功能集成在 CoDeSys 编程系统和 CoDeSys 实时运行系统中,便形成了 CoDeSys SoftMotion 工具包。 从简单的运动控制到复杂 CNC 控制的多种复杂应用, 都可 以使用德国 3S 软件公司的运动控制解决方案 CoDeSys SoftMotion 来进行编程和控制。 通常,传统的运动控制解决方案是使用单片机及 其相关的硬件来实现的。 CoDeSys SoftMotion 则提供了一种完全与众不同的优质高效方案: 集成在 PLC 编程系统中的工具包 CoDeSys SoftMotion 提供了运动控制所必需的全部功能。这个工具包集成了符合 IEC 61131-3 国际标准的编程语言。用户可以用一个抽象的数据结构(现场总线和独立的硬件制 造商)来实现对轴的各种操作。而现场总线的通信则是通过驱动接口来实现的。这些驱动接 口可以通过 CoDeSys 工程树中的设备配置器来进行配置。 3S 软件公司为以下运动控制模式制单元(POUs)的单轴与多轴运动控制 电子凸轮传动控制 电子齿轮传动控制 多轴的 CNC 控制
CoDeSys SoftMotion 包括:
包含基于 IEC61131-3 标准的所有运动控制功能块的 POU 库函数,此标准是由 PLCopen 国际组织定义的。 附带所有必要组件的 CNC POU 库函数,可开发出多种不同的运动控制系统:从一 个插补器到轨迹生成的 POU。此设计使得所有的程序组合单元(POUs)可以实现 无缝集成,而且可以将整个应用开发清晰地划分到不同的任务中去。 通用接口的驱动如 CAN、EtherCAT、SERCOS、模拟量等等。 适用于目前众多的硬件驱动系统,如博世力士乐、伦茨、丹纳赫、KEB、施奈德、 倍福等等。 用来规划和编辑运动控制的图形化编辑器: —图形化的 DIN 66025 编辑器(支持 G-Code) —CAM 编辑器
支持的驱动器:
标准的 3S 公司软件接口目前支持下列驱动: