曲线拟合的最小二乘法
曲线拟合最小二乘法
曲线拟合最小二乘法
最小二乘法是统计学中最常用的数据拟合方法,也被称为**最小平方法**。
该方法在数学和统计学中已经有很长的历史,广泛应用于各种学科的科学研究和实际应用。
最小二乘法的主要思想是最小化所给数据点与目标曲线之间的误差平方和,以此来确定目标曲线的参数。
具体而言,最小二乘法是根据**基函数**与参数之间的函数关系,采用多元函数去拟合所给数据点,旨在最小化拟合数据点和多元函数之间误差平方和的拟合方法。
最小二乘法可以用来拟合任何形式的曲线,在各种应用中都大量应用。
比如在政治学、经济学和心理学中,研究者通过最小二乘法来拟合某种结果与输入变量之间的联系,以更好地理解呈现结果的背景机制;在数值计算中,最小二乘法可用来拟合数值计算数据,从而精确地求解各种方程;而在工程学中,最小二乘法常用来拟合统计数据,估计影响工作效率的各种自变量。
总之,最小二乘法是一种统计学中经久不衰的拟合方法,可以用来拟合任何形式的曲线,在广泛的应用领域有着重要地位。
计算方法课件第六章最小二乘法与曲线拟合
例1: y aebx
ln y ln a bx
u ln y, A ln a, B b
u A Bx
例2: y
a
1 bx
u 1 y
1 a bx y u a bx
3.写出矛盾方程组。 4.写出正则方程组。(可由多项式模型直接得到)
5.求解正则方程组,得到拟合曲线的待定系数。 6.将正则方程组的解带回到数学模型中,得到拟 合曲线。
Remark
1.同一问题可以有不同的拟合曲线,通常根据均方误
差 N [ (xi 和) 最yi大]2 偏差
max
1i N
( xi
t cos 0.669131 0.390731 0.121869 -0.309017 -0.587785
记 a 1 , b e ,得拟合模型:a bt y
p
p
则矛盾方程组为:
1 0.669131
0.370370
1
1 1
0.390731 0.121869 0.309017
a b
0.500000
一、曲线拟合模型
定义:依据某种标准选择一条“最好”的简单
曲线作为一组离散数据(
xi
,
yi
)
N i0
的连续模型。
确定曲线的类型:一般选取简单的低次多项式。
求一个次数不高于N-1次的多项式:
y (x) a0 a1x a2x2 amxm
(m N 1)
(其中a0,a1,…,am待定),使其“最好”的拟合
j 1
j 1
n a1 j x j b1
计算方法 第三章曲线拟合的最小二乘法20191103
§2 多项式拟合函数
例3.1 根据如下离散数据拟合曲线并估计误差
x 1 23 4 6 7 8 y 2 36 7 5 3 2
解: step1: 描点
7
*
step2: 从图形可以看出拟
6 5
*
合曲线为一条抛物线:
4
y c0 c1 x c2 x2
3 2 1
* *
* * *
step3: 根据基函数给出法
法
18
定理 法方程的解是存在且唯一的。
证: 法方程组的系数矩阵为
(0 ,0 ) (1 ,0 )
G
(0
,1
)
(1 ,1 )
(0 ,n ) (1 ,n )
(n ,0 )
(
n
,
1
)
(n ,n )
因为0( x),1( x), ...,n( x)在[a, b]上线性无关,
所以 G 0,故法方程 GC F 的解存在且唯一。
第三章 曲线拟合的最小二乘法
2
最小二乘拟合曲线
第三章 曲线拟合的最小二乘
2021/6/21
法
3
三次样条函数插值曲线
第三章 曲线拟合的最小二乘
2021/6/21
法
4
Lagrange插值曲线
第三章 曲线拟合的最小二乘
2021/6/21
法
5
一、数据拟合的最小二乘法的思想
已知离散数据: ( xi , yi ), i=0,1,2,…,m ,假设我们用函
便得到最小二乘拟合曲线
n
* ( x) a*j j ( x) j0
为了便于求解,我们再对法方程组的导出作进一步分析。
第三章 曲线拟合的最小二乘
曲线拟合的最小二乘法实验
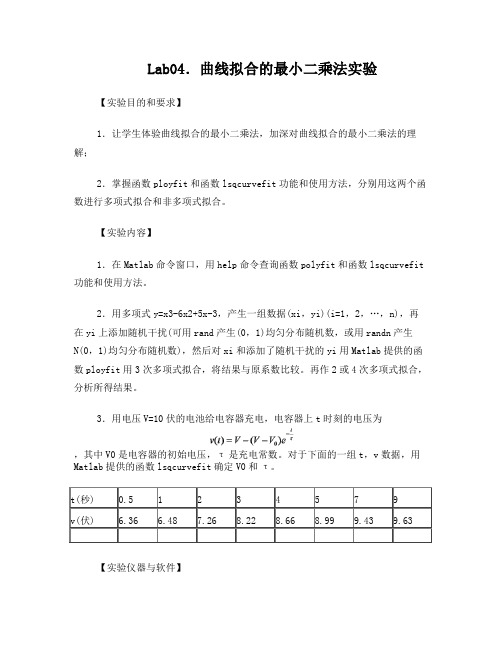
Lab04.曲线拟合的最小二乘法实验【实验目的和要求】1.让学生体验曲线拟合的最小二乘法,加深对曲线拟合的最小二乘法的理解;2.掌握函数ployfit和函数lsqcurvefit功能和使用方法,分别用这两个函数进行多项式拟合和非多项式拟合。
【实验内容】1.在Matlab命令窗口,用help命令查询函数polyfit和函数lsqcurvefit 功能和使用方法。
2.用多项式y=x3-6x2+5x-3,产生一组数据(xi,yi)(i=1,2,…,n),再在yi上添加随机干扰(可用rand产生(0,1)均匀分布随机数,或用randn产生N(0,1)均匀分布随机数),然后对xi和添加了随机干扰的yi用Matlab提供的函数ployfit用3次多项式拟合,将结果与原系数比较。
再作2或4次多项式拟合,分析所得结果。
3.用电压V=10伏的电池给电容器充电,电容器上t时刻的电压为,其中V0是电容器的初始电压,τ是充电常数。
对于下面的一组t,v数据,用Matlab提供的函数lsqcurvefit确定V0和τ。
t(秒) 0.5 1 2 3 4 5 7 9v(伏) 6.36 6.48 7.26 8.22 8.66 8.99 9.43 9.63 【实验仪器与软件】1.CPU主频在1GHz以上,内存在128Mb以上的PC;2.Matlab 6.0及以上版本。
实验讲评:实验成绩:评阅教师:200 年月日问题及算法分析:1、利用help命令,在MATLAB中查找polyfit和lsqcurvefit函数的用法。
2、在一组数据(xi,yi)(i=1,2,…,n)上,对yi上添加随机干扰,运用多项式拟合函数,对数据进行拟合(分别用2次,3次,4次拟合),分析拟合的效果。
3、根据t和V的关系画散点图,再根据给定的函数运用最小二乘拟合函数,确定其相应参数。
第一题:(1)>> help polyfitPOLYFIT Fit polynomial to data.P = POLYFIT(X,Y,N) finds the coefficients of a polynomial P(X) ofdegree N that fits the data Y best in a least-squares sense. P is arow vector of length N+1 containing the polynomial coefficients indescending powers, P(1)*X^N + P(2)*X^(N-1) +...+ P(N)*X + P(N+1).[P,S] = POLYFIT(X,Y,N) returns the polynomial coefficients P and astructure S for use with POLYVAL to obtain error estimates forpredictions. S contains fields for the triangular factor (R) from a QRdecomposition of the Vandermonde matrix of X, the degrees of freedom(df), and the norm of the residuals (normr). If the data Y are random,an estimate of the covariance matrix of P is(Rinv*Rinv')*normr^2/df,where Rinv is the inverse of R.[P,S,MU] = POLYFIT(X,Y,N) finds the coefficients of a polynomial inXHAT = (X-MU(1))/MU(2) where MU(1) = MEAN(X) and MU(2) = STD(X). Thiscentering and scaling transformation improves the numerical propertiesof both the polynomial and the fitting algorithm.Warning messages result if N is >= length(X), if X has repeated, ornearly repeated, points, or if X might need centering and scaling.Class support for inputs X,Y:float: double, singleSee also poly, polyval, roots.Reference page in Help browserdoc polyfit>>(2)>> help lsqcurvefitLSQCURVEFIT solves non-linear least squares problems.LSQCURVEFIT attempts to solve problems of the form:min sum {(FUN(X,XDATA)-YDATA).^2} where X, XDATA, YDATA and the valuesX returned by FUN can be vectors ormatrices.X=LSQCURVEFIT(FUN,X0,XDATA,YDATA) starts at X0 and finds coefficients Xto best fit the nonlinear functions in FUN to the data YDATA (in theleast-squares sense). FUN accepts inputs X and XDATA and returns avector (or matrix) of function values F, where F is the same size asYDATA, evaluated at X and XDATA. NOTE: FUN should returnFUN(X,XDATA)and not the sum-of-squares sum((FUN(X,XDATA)-YDATA).^2).((FUN(X,XDATA)-YDATA) is squared and summed implicitly in thealgorithm.)X=LSQCURVEFIT(FUN,X0,XDATA,YDATA,LB,UB) defines a set of lower andupper bounds on the design variables, X, so that the solution is in therange LB <= X <= UB. Use empty matrices for LB and UB if no boundsexist. Set LB(i) = -Inf if X(i) is unbounded below; set UB(i) = Inf ifX(i) is unbounded above.X=LSQCURVEFIT(FUN,X0,XDATA,YDATA,LB,UB,OPTIONS) minimizes with thedefault parameters replaced by values in the structure OPTIONS, anargument created with the OPTIMSET function. See OPTIMSET for details.Used options are Display, TolX, TolFun, DerivativeCheck, Diagnostics,FunValCheck, Jacobian, JacobMult, JacobPattern, LineSearchType,LevenbergMarquardt, MaxFunEvals, MaxIter, DiffMinChange andDiffMaxChange, LargeScale, MaxPCGIter, PrecondBandWidth, TolPCG,OutputFcn, and TypicalX. Use the Jacobian option to specify that FUNalso returns a second output argument J that is the Jacobian matrix atthe point X. If FUN returns a vector F of m components when X has length n, then J is an m-by-n matrix where J(i,j) is the partialderivative of F(i) with respect to x(j). (Note that the Jacobian J isthe transpose of the gradient of F.)[X,RESNORM]=LSQCURVEFIT(FUN,X0,XDATA,YDATA,...) returns the valueof thesquared 2-norm of the residual at X: sum {(FUN(X,XDATA)-YDATA).^2}.[X,RESNORM,RESIDUAL]=LSQCURVEFIT(FUN,X0,...) returns the value of residual,FUN(X,XDATA)-YDATA, at the solution X.[X,RESNORM,RESIDUAL,EXITFLAG]=LSQCURVEFIT(FUN,X0,XDATA,YDATA,...) returnsan EXITFLAG that describes the exit condition of LSQCURVEFIT. Possiblevalues of EXITFLAG and the corresponding exit conditions are1 LSQCURVEFIT converged to a solution X.2 Change in X smaller than the specified tolerance.3 Change in the residual smaller than the specified tolerance.4 Magnitude of search direction smaller than the specified tolerance.0 Maximum number of function evaluations or of iterations reached.-1 Algorithm terminated by the output function.-2 Bounds are inconsistent.-4 Line search cannot sufficiently decrease the residual alongthecurrent search direction.[X,RESNORM,RESIDUAL,EXITFLAG,OUTPUT]=LSQCURVEFIT(FUN,X0,XDATA,YDATA ,...)returns a structure OUTPUT with the number of iterations taken inOUTPUT.iterations, the number of function evaluations inOUTPUT.funcCount,the algorithm used in OUTPUT.algorithm, the number of CG iterations (ifused) in OUTPUT.cgiterations, the first-order optimality (if used)inOUTPUT.firstorderopt, and the exit message in OUTPUT.message.[X,RESNORM,RESIDUAL,EXITFLAG,OUTPUT,LAMBDA]=LSQCURVEFIT(FUN,X0,XDAT A,YDATA,...)returns the set of Lagrangian multipliers, LAMBDA, at the solution:LAMBDA.lower for LB and LAMBDA.upper for UB.[X,RESNORM,RESIDUAL,EXITFLAG,OUTPUT,LAMBDA,JACOBIAN]=LSQCURVEFIT(FU N,X0,XDATA,YDATA,...)returns the Jacobian of FUN at X.ExamplesFUN can be specified using @:xdata = [5;4;6]; % example xdataydata = 3*sin([5;4;6])+6; % example ydatax = lsqcurvefit(@myfun, [2 7], xdata, ydata)where myfun is a MATLAB function such as:function F = myfun(x,xdata)F = x(1)*sin(xdata)+x(2);FUN can also be an anonymous function:x = lsqcurvefit(@(x,xdata) x(1)*sin(xdata)+x(2),[2 7],xdata,ydata)If FUN is parameterized, you can use anonymous functions to capture theproblem-dependent parameters. Suppose you want to solve the curve-fittingproblem given in the function myfun, which is parameterized by its secondargument c. Here myfun is an M-file function such asfunction F = myfun(x,xdata,c)F = x(1)*exp(c*xdata)+x(2);To solve the curve-fitting problem for a specific value of c, first assignthe value to c. Then create a two-argument anonymous function that capturesthat value of c and calls myfun with three arguments. Finally, pass thisanonymous function to LSQCURVEFIT:xdata = [3; 1; 4]; % example xdataydata = 6*exp(-1.5*xdata)+3; % example ydatac = -1.5; % define parameterx = lsqcurvefit(@(x,xdata) myfun(x,xdata,c),[5;1],xdata,ydata) See also optimset, lsqnonlin, fsolve, @, inline.Reference page in Help browserdoc lsqcurvefit>>第二题:1 三次线性拟合clear allx=0:0.5:5;y=x.^3-6*x.^2+5*x-3;y1=y;for i=1:length(y)y1(i)=y1(i)+rand;enda=polyfit(x,y1,3);b=polyval(a,x);plot(x,y,'*',x,b),aa =1.0121 -6.1033 5.1933 -2.4782② 二次线性拟合clear allx=0:0.5:20;y=x.^3-6*x.^2+5*x-3;y1=y;for i=1:length(y)y1(i)=y1(i)+rand;enda=polyfit(x,y1,2);b=polyval(a,x);plot(x,y,'*',x,b),aa =23.9982 -232.0179 367.9756③ 四次线性拟合clear allx=0:0.5:20;y=x.^3-6*x.^2+5*x-3;y1=y;for j=1:length(y)y1(j)=y1(j)+rand;enda=polyfit(x,y1,4);b=polyval(a,x);plot(x,y,'*',x,b),aa =-0.0001 1.0038 -6.0561 5.2890 -2.8249 >>第三题:1 拟合曲线为:f(x)=定义函数:function f=fun(a,x)f=a(1)-(a(1)-a(2))*exp(-a(3)*x);主程序:clear allclcx=[0.5 1 2 3 4 5 7 9];y=[6.36 6.48 7.26 8.22 8.66 8.99 9.43 9.63];a0=[1 1 1];a=lsqcurvefit('fun',a0,x,y);y1=a(1)-(a(1)-a(2))*exp(-a(3)*x);plot(x,y,'r*',x,y1,'b')V1=a(2)tei=1/a(3)Optimization terminated: relative function value changing by less than OPTIONS.TolFun.。
曲线拟合——最小二乘法算法

曲线拟合——最小二乘法算法一、目的和要求1)了解最小二乘法的基本原理,熟悉最小二乘算法;2)掌握最小二乘进行曲线拟合的编程,通过程序解决实际问题。
二、实习内容1)最小二乘进行多项式拟合的编程实现。
2)用完成的程序解决实际问题。
三、算法1)输入数据节点数n ,拟合的多项式次数m ,循环输入各节点的数据x j , y j (j=0,1,…,n-1)2)由x j 求S ;由x j ,y j 求T :S k =∑-=10n j k j x ( k=0,1,2, … 2*m ) T k = ∑-=10n j k j j x y ( k=0,1,2,… m )3)由S 形成系数矩阵数组c i,j :c[i][j]=S[i+j] (i=0,1,2,…m, j=0,1,2,…,m);由T 形成系数矩阵增广部分c i,m+1:c[i][m+1]=T[i] (i=0,1,2,…m)4)对线性方程组CA=T[或A C ],用列主元高斯消去法求解系数矩阵A=(a 0,a 1,…,a m )T四、实验步骤1)完成最小二乘法进行曲线拟合的程序设计及录入、编辑;2)完成程序的编译和链接,并进行修改;3)用书上P105例2的例子对程序进行验证,并进行修改;4)用完成的程序求解下面的实际问题。
5)完成实验报告。
五、实验结果1. 经编译、链接及例子验证结果正确的源程序:#include<stdio.h>#include<math.h>#define Q 100float CF(int,float);main(){int i,j,n1,n,p,k,q;float x[Q],y[Q],s[Q]={0},t[Q]={0},a[Q][Q]={0},l,sum=0;/*以下是最小二乘的程序*/printf("input 数据组数n");scanf("%d",&n);printf("input 拟合次数n1");scanf("%d",&n1);for(i=0;i<n;i++){printf("x[%d]=",i);scanf("%f",&x[i]);printf("y[%d]=",i);scanf("%f",&y[i]);}for(i=0;i<=2*n1;i++)for(j=0;j<n;j++){s[i]=s[i]+CF(i,x[j]);if(i<=n1)t[i]=t[i]+y[j]*CF(i,x[j]);}for(i=0;i<n1+1;i++)for(j=0;j<n1+2;j++){a[i][j]=s[i+j];if(j==n1+1)a[i][j]=t[i];}for(i=0;i<n1+1;i++)for(j=0;j<n1+2;j++)printf("a[%d][%d]=%f",i,j,a[i][j]); /*以下的是削去法的程序*/for(j=0;j<=n1-1;j++){p=j;for(i=j+1;i<=n1;i++){if(fabs(a[j][j])<fabs(a[i][j]))p=i;}if(p!=j)for(i=j;i<=n1+1;i++){l=a[p][i];a[p][i]=a[j][i];a[j][i]=l;}for(k=j+1;k<=n1;k++){l=a[k][j]/a[j][j];for(q=j;q<=n1+1;q++)a[k][q]=a[k][q]-l*a[j][q];}}for(i=0;i<n1+1;i++){for(j=0;j<n1+2;j++)printf("a[%d][%d]=%f\n",i,j,a[i][j]);printf("\n");}x[n1]=a[n1][n1+1]/a[n1][n1];for(i=n1-1;i>=0;i--){for(j=i+1;j<=n1;j++)sum=a[i][j]*x[j]+sum;x[i]=(a[i][n1+1]-sum)/a[i][i];sum=0;}for(i=0;i<=n1;i++)printf("x[%d]=%f\n",i,x[i]);}float CF(int i,float v){float a=1.0;while(i--)a*=v;return a;}2. 实例验证结果:1)输入初始参数:n=9,m=2X:1 3 4 5 6 7 8 9 10Y:10 5 4 2 1 1 2 3 42)结果输出:1.实际应用问题:作物体运动的观测实验,得出以下实验测量数据,用最小二乘拟合求物体的运动方程。
最小二乘法曲线拟合原理

最小二乘法曲线拟合原理最小二乘法曲线拟合是一个重要的数值分析方法,它是通过最小二乘法对样本点与直线或曲线之间的关系进行拟合和分析,从而估算出一个函数的一组参数。
最小二乘法曲线拟合是一种经典的数值分析方法,可以用来拟合函数和曲线,估算出参数,预测数据,分析函数,优化模型,甚至可以分析复杂多变量函数。
最小二乘法曲线拟合的核心方法是使用最小二乘法把拟合的曲线拟合到观察到的数据,通过求解方程的最小二乘法,把一系列的观察数据点拟合为最小二乘法曲线,计算出拟合曲线的最佳系数,满足拟合效果的最佳拟合曲线。
最小二乘法曲线拟合的核心目标是通过计算拟合曲线的最小均方误差(SSE)、平均均方误差(MSE)、最大均方误差(MAXE)等方法,使拟合曲线与观察数据点之间的差距最小,从而求解出最佳拟合曲线系数。
最小二乘法曲线拟合具有很强的解析性,可以用数学计算方法快速求解,可以满足各种不同应用场景的需求,因而被广泛应用于科学研究、工程设计、市场分析等领域。
最小二乘法曲线拟合最常见的应用场景有:根据观察数据拟合和估计函数的参数;分析函数的性质;优化模型的能力;预测数据等等。
当应用最小二乘法拟合函数时,首先需要把观察数据用直线或曲线拟合,然后使用极小化残差平方和的方法,来求解参数,这是一个典型的最优化问题,利用一般最优化算法来求解,如梯度下降算法、牛顿法等。
此外,在应用最小二乘法曲线拟合的过程中,还可以考虑几种情况,比如样本数据受到误差的影响,具有某种偏差性;偏差是否服从正态分布;样本数据的分布是否同分布;拟合曲线的拟合是否收敛,参数计算是否准确等等。
总之,最小二乘法曲线拟合是一种重要的数值分析方法,可以用来拟合函数和曲线、估算参数、预测数据、优化模型等。
在应用最小二乘法曲线拟合时,需要考虑一些影响因素,比如样本数据受到误差的影响、偏差是否服从正态分布等,因此,它是一种有效的数值分析方法。
最小二乘拟合原理

最小二乘拟合原理
最小二乘拟合(Least squares fitting)是一种常用的数据拟合方法,它通过将观测数据点与拟合函数的最小垂直距离的平方和最小化来确定最佳拟合曲线或平面。
最小二乘法的核心原理是寻找最小化误差的最优解,即使得拟合曲线与原始数据的离散程度最小。
最小二乘拟合是基于以下假设:
1. 假设数据之间的噪声是服从高斯分布的,也就是正态分布。
2. 假设数据点之间是独立的。
最小二乘法的目标是找到一个函数的参数,使得该函数与给定的一组数据点的误差最小。
这里的误差是指拟合函数与真实数据点之间的差异。
通过最小二乘法,我们可以找到最佳拟合函数的参数,使得拟合函数与观测数据的残差平方和最小化。
具体而言,最小二乘法可以应用于各种拟合问题,例如线性回归、多项式拟合和非线性拟合。
对于线性回归问题,最小二乘法可以通过解析解或数值优化方法(如梯度下降)来求解最佳拟合直线的参数。
需要注意的是,最小二乘法在某些情况下可能会受到极值点的影响,导致过拟合或欠拟合的问题。
因此,在使用最小二乘法进行数据拟合时,需要合理选择拟合函数的形式,并对拟合结果进行评估和验证。
第5章-1 曲线拟合(线性最小二乘法)讲解
求所需系数,得到方程: 29.139a+17.9b=29.7076 17.9a+11b=18.25
通过全选主元高斯消去求得:
a=0.912605
b=0.174034
所以线性拟合曲线函数为: y=0.912605x+0.174034
练习2
根据下列数据求拟合曲线函数: y=ax2+b
x 19 25 31 38 44 y 19.0 32.3 49.0 73.3 97.8
∑xi4 a + ∑xi2 b = ∑xi 2yi
∑xi2 a + n b = ∑yi
7277699a+5327b=369321.5 5327a+5b=271.4
曲线拟合的最小二乘法
1.曲线拟合的意思
Y
.
.
.
.
y=ax+b y=ax2+bx+c
X
y=ax+b y=ax2+bx+c 就是未知函数的拟合曲线。
2最小二乘法原理
观测值与拟合曲线值误差的平方和为最小。
yi y0 y1 y2 y3 y4…… 观测值 y^i y^0 y^1 y^2 y^3 y^4…… 拟合曲线值
拟合曲线为: y=(-11x2-117x+56)/84
x
yHale Waihona Puke 1.61 1.641.63 1.66
1.6 1.63
1.67 1.7
1.64 1.67
1.63 1.66
1.61 1.64
1.66 1.69
1.59 1.62
origin最小二乘法曲线拟合

origin最小二乘法曲线拟合最小二乘法曲线拟合是数学中的一种重要的拟合技术,它的主要作用是用最小二乘法曲线拟合数据,用于预测数据、分析数据变化趋势等。
1. 什么是最小二乘法曲线拟合?最小二乘法曲线拟合是一种数学方法,它假设数据点可以使用某个函数来拟合,以最小二乘法方法最小化由该函数参数估计值的“残差平方和”的值的过程。
所拟合的函数称为最小二乘法曲线或拟合曲线,其参数估计值称为参数估计值(又称拟合系数或参数估计)。
2. 最小二乘法曲线拟合的应用:(1)预测数据:通过分析拟合出来的曲线,可以预测未来的数据走势;(2)分析数据变化趋势:通过拟合出来的曲线可以看出过去数据的变化趋势;(3)估算参数值:可以用此方法对数据中某个参数值进行准确估算;(4)确定有关性系数:最小二乘法曲线拟合可以确定两个变量之间的相关性系数。
3. 最小二乘法曲线拟合的步骤:(1)首先记录被测量的原始数据,找出变量的坐标原点;(2)用最小二乘法曲线拟合,求出拟合函数的参数估计值;(3)求出拟合出的曲线,并用该曲线代入原始函数,观察拟合效果;(4)采用常用的统计评价指标(比如均方根误差、决定系数等)来进行拟合程度的评价;(5)如果拟合值不理想,可以考虑更改拟合曲线的变量个数或估计参数值,重新求解,重复以上步骤,直至拟合效果较好,完成拟合过程。
4. 最小二乘法曲线拟合的改进:(1)可以采用多元线性回归来完善最小二乘法曲线拟合,以更加精确的拟合数据;(2)此外,通过对数据进行重复性拟合,加大拟合幂数等,也可以更加准确地拟合数据;(3)另外,可以采用正则化方法结合最小二乘法来拟合非线性数据,提高准确性。
5.最小二乘法曲线拟合的优点:(1)算法简单,计算速度快,效率高;(2)不需要精确的初始估计值;(3)可以拟合各种类型的函数形式;(4)泛化性良好,结果精度较高;(5)对某些变量的影响程度可以根据变量的权重来解释。
excel拟合曲线用的最小二乘法
Excel拟合曲线用的最小二乘法1. 介绍Excel作为一款常用的办公软件,被广泛应用于数据分析和处理,而拟合曲线是数据分析中常用的方法之一。
拟合曲线用的最小二乘法是一种常见的拟合方法,通过最小化数据点与拟合曲线之间的距离来找到最佳拟合曲线,从而对数据进行预测和分析。
在本文中,我将从深度和广度的角度来探讨Excel拟合曲线用的最小二乘法,带你深入探索这一主题。
2. 最小二乘法的原理在Excel中进行曲线拟合时,最小二乘法是一种常用的拟合方法。
其原理是通过最小化残差平方和来找到最佳拟合曲线。
残差是指每个数据点到拟合曲线的垂直距离,最小二乘法通过调整拟合曲线的参数,使得残差平方和最小化,从而得到最佳拟合曲线。
在Excel中,可以利用内置函数或插件来实现最小二乘法的曲线拟合,对于不同类型的曲线拟合,可以选择不同的拟合函数进行拟合。
3. Excel中的拟合曲线在Excel中进行拟合曲线时,首先需要将数据导入Excel,然后利用内置的数据分析工具或者插件来进行曲线拟合。
通过选择拟合函数、调整参数等操作,可以得到拟合曲线的相关信息,如拟合优度、参数估计值等。
可以根据拟合曲线的结果来对数据进行预测和分析,从而得到对应的结论和见解。
4. 个人观点与理解对于Excel拟合曲线用的最小二乘法,我认为这是一种简单而有效的数据分析方法。
它能够快速对数据进行拟合,并得到拟合曲线的相关信息,对于数据的预测和分析具有一定的帮助。
然而,也需要注意到拟合曲线并不一定能够准确描述数据的真实情况,需要结合实际背景和专业知识进行分析和判断。
在使用最小二乘法进行曲线拟合时,需要注意数据的可靠性和拟合结果的可信度,以避免出现不准确的结论和偏差的情况。
5. 总结通过本文的探讨,我们对Excel拟合曲线用的最小二乘法有了更深入的了解。
最小二乘法的原理、Excel中的实际操作以及个人观点与理解都得到了充分的展示和探讨。
在实际应用中,需要结合具体情况和专业知识来灵活运用最小二乘法进行曲线拟合,从而得到准确的分析和预测结果。
拟合曲线的方法
拟合曲线的方法
拟合曲线是一种数据分析方法,用于找到最适合描述数据的数学函数或曲线。
这种方法主要用于通过已知数据点来估计未知数据点的数值。
在拟合曲线的过程中,有几种常见的方法可以使用。
下面是其中一些常见的方法:
1. 最小二乘法:最小二乘法是一种常见的拟合曲线方法,其目标是通过最小化观测数据点与拟合曲线之间的误差来找到最佳拟合曲线。
这种方法可以应用于线性和非线性函数。
2. 多项式拟合:多项式拟合是一种通过多项式函数来拟合数据的方法。
它通常用于拟合曲线比较平滑的数据集。
多项式拟合方法可以根据数据的复杂度选择合适的多项式阶数,例如线性、二次、三次等。
3. 样条插值:样条插值是一种通过多个分段多项式函数来拟合数据的方法。
这种方法通过将数据集划分为多个小段,并在每个小段上拟合一个多项式函数,从而得到整体的曲线拟合。
4. 非参数拟合:非参数拟合是一种不依赖于特定函数形式的拟合曲线方法。
这种方法主要通过使用核函数或直方图等技术来估计数据的概率密度函数,并从中得到拟合曲线。
总体而言,选择合适的拟合曲线方法取决于数据的特征和对拟合结果的要求。
需要根据数据的分布、噪声水平和所需精度等因素来选择合适的方法。
此外,还可以使用交叉验证等技术来评估拟合曲线的质量,并选择最佳的拟合曲线模型。
最小二乘法拟合指数曲线

最小二乘法拟合指数曲线在数学建模和数据分析中,最小二乘法是一种常用的数学方法,它常被用来求解拟合问题。
拟合问题的目标是找到一条曲线,使其与给定的数据点最为接近。
对于指数曲线的拟合,最小二乘法同样可以发挥作用。
首先,我们需要明确指数曲线的函数形式。
指数曲线一般可以用以下公式表示:y=ae^(bx),其中a和b都是常数,e是自然对数的底。
其次,最小二乘法的关键思想是找到使得拟合曲线与实际数据点之间的误差最小的参数值。
对于指数曲线的拟合,我们可以将误差定义为实际数据点与拟合曲线之间的垂直距离,即残差。
最小二乘法的目标是最小化所有数据点的残差的平方和。
为了求解最小二乘曲线拟合问题,我们首先需要构建残差函数。
对于给定的数据点(xi,yi),我们可以计算出对应的拟合值fi=ae^(bxi),然后计算残差ei=yi-fi。
然后我们需要最小化所有残差的平方和。
可以通过对残差函数进行求导,令导数为0,得到使得残差函数最小的参数值。
解得的参数值即为最小二乘法拟合指数曲线所需要的参数。
利用这些参数,我们可以得到拟合的指数曲线方程,并利用该方程进行预测和分析。
最后,我们需要评估拟合结果的好坏程度。
常用的评估指标包括平均绝对误差(MAE)、均方根误差(RMSE)等。
这些指标可以帮助我们了解拟合结果与实际数据之间的偏差程度,以及拟合模型的预测准确性。
综上所述,最小二乘法是一种有效的拟合方法,可以用于拟合指数曲线。
通过构建残差函数并最小化残差的平方和,我们可以求解出使得拟合曲线与实际数据点最为接近的参数值。
然后利用这些参数,我们可以得到拟合的指数曲线方程,并进行进一步的分析和预测。
当然,我们也需要在评估拟合结果时使用合适的指标来判断拟合的好坏程度。
通过合理地运用最小二乘法,我们可以更好地理解和应用指数曲线拟合问题。
数值分析论文--曲线拟合的最小二乘法
曲线拟合的最小二乘法姓名:学号:专业:材料工程学院:材料科学与工程学院科目:数值分析曲线拟合的最小二乘法一、目的和意义在物理实验中经常要观测两个有函数关系的物理量。
根据两个量的许多组观测数据来确定它们的函数曲线,这就是实验数据处理中的曲线拟合问题。
这类问题通常有两种情况:一种是两个观测量x 与y 之间的函数形式已知,但一些参数未知,需要确定未知参数的最佳估计值;另一种是x 与y 之间的函数形式还不知道,需要找出它们之间的经验公式。
后一种情况常假设x 与y 之间的关系是一个待定的多项式,多项式系数就是待定的未知参数,从而可采用类似于前一种情况的处理方法。
在两个观测量中,往往总有一个量精度比另一个高得多,为简单起见把精度较高的观测量看作没有误差,并把这个观测量选作 x,而把所有的误差只认为是y的误差。
设 x 和 y 的函数关系由理论公式y=f(x;c1,c2,……cm)(0-0-1)给出,其中 c1,c2,……cm 是 m 个要通过实验确定的参数。
对于每组观测数据(xi,yi)i=1,2,……,N。
都对应于xy 平面上一个点。
若不存在测量误差,则这些数据点都准确落在理论曲线上。
只要选取 m 组测量值代入式(0-0-1),便得到方程组yi = f (x ;c1 ,c2 ,……cm)(0-0-2)式中 i=1,2,……,m.求 m 个方程的联立解即得 m 个参数的数值。
显然N<m 时,参数不能确定。
y 2 y 在 N>m 的情况下,式(0-0-2)成为矛盾方程组,不能直接用解方程的方法求得 m 个参数值,只能用曲线拟合的方法来处理。
设测量中不存在着系统误差,或者说已经修正,则 y 的观测值 yi 围绕着期望值 <f (x ;c1,c2,……cm)> 摆 动,其分布为正态分布,则 yi 的概率密度为p y i1 exp,式中i是分布的标准误差。
为简便起见,下面用 C 代表(c1,c2,……cm )。
第3章_曲线拟合的最小二乘法 计算方法

用高斯-若当无回代消去法解此方程组,得a0=13.454, a1=-3.657,a2=0.272。 最小二乘拟合多项式为:
计 算 方 法 课 件
y p2 ( x) 13.454 3.657x 0.272x 2
3 非线性曲线转化为线性拟合:
y a e ln y ln a bx
14
xi i 1 n 2 xi i 1
n
即法方程。
计 算 方 法 课 件
n n xi i 1
n xi yi a0 i 1 i 1 n n a 2 1 xi xi yi i 1 i 1
x ax b
11
§3.3 解矛盾方程组
1. 矛盾方程组 已知数据点为
计 算 方 法 课 件
( xi , yi ), i 1,2,...,n
通过点(xi,yi),则
作拟合直线 若直线
p( x) a0 a1 x
p( x) a0 a1 x
p( xi ) a0 a1 xi yi
简化为
x1 x2 xn
a0 a1 m xn am x x
m 1 m 2
y1 y2 y n
Ax b
16
其法方程为:
计 算 方 法 课 件
n xi xm i
n
3
由此可出求系数 拟合直线为
ˆ ˆ, b a
ˆx ˆ b p( x) a
( xi , yi ), i 1,2,...,n
计 算 方 法 课 件
最小二乘法多项式曲线拟合原理与实现

最小二乘法多项式曲线拟合原理与实现一、引言最小二乘法多项式曲线拟合是一种常用的数据拟合方法,它可以通过一组离散的数据点来拟合出一个多项式函数,从而达到对数据进行预测和分析的目的。
本文将详细介绍最小二乘法多项式曲线拟合的原理与实现。
二、最小二乘法最小二乘法是一种数学优化方法,它可以通过最小化误差平方和来求解未知参数。
在多项式曲线拟合中,我们需要求解多项式函数中各个系数的值,使得该函数与给定数据点之间的误差平方和最小。
三、多项式曲线拟合多项式曲线拟合是指通过一组离散的数据点来拟合出一个多项式函数,该函数能够较好地描述这些数据点之间的关系。
在实际应用中,我们通常使用低阶的多项式函数来进行拟合,例如一次、二次或三次多项式函数。
四、最小二乘法多项式曲线拟合原理假设我们有n个离散的数据点(x1,y1),(x2,y2),...,(xn,yn),其中xi表示自变量,yi表示因变量。
我们希望通过这些数据点来拟合出一个m次多项式函数y=f(x),其中m为多项式的阶数。
我们可以将多项式函数表示为如下形式:f(x)=a0+a1x+a2x^2+...+amxm其中a0,a1,...,am为待求解的系数。
我们需要通过最小二乘法来求解这些系数的值。
首先,我们需要定义误差平方和E(a0,a1,...,am):E(a0,a1,...,am)=∑i=1n(yi−f(xi))^2然后,我们需要求解使得误差平方和最小的系数值。
为了方便计算,我们可以将误差平方和展开:E(a0,a1,...,am)=∑i=1n(yi−a0−a1xi−a2xi^2−...−amxm)^2接下来,我们需要对误差平方和进行求导,并令导数等于零,从而得到使得误差平方和最小的系数值。
具体来说,我们需要分别对每个系数进行求导:∂E/∂a0=−2∑i=1n(yi−a0−a1xi−a2xi^2−...−amxm)∂E/∂a1=−2∑i=1n(xi(yi−a0−a1xi−a2xi^2−...−amxm))...∂E/∂am=−2∑i=1n(xmi(yi−a0−a1xi−a2xi^2−...−amxm))然后,我们将每个导数等于零,得到一个线性方程组:∑j=0maijaj=∑i=1nyi×xi^j其中aij表示第j个系数的第i次幂。
python曲线拟合的最小二乘法

Python曲线拟合的最小二乘法引言在实际应用中,我们经常需要通过已知数据去拟合一条曲线,以便更好地理解数据的趋势和规律。
曲线拟合是一种常用的数据分析方法,而最小二乘法则是其中最常见和重要的一种技术手段。
本文将介绍如何使用Python进行曲线拟合,并着重讨论最小二乘法的应用和原理。
1. 什么是最小二乘法?最小二乘法是一种数学优化方法,用于确定一组数据和一个数学关系式之间的最优拟合曲线。
具体来说,对于给定的一组数据点,最小二乘法的目标是找到一个数学模型,使得该模型计算出的值与实际观测值之间的残差平方和最小。
2. 最小二乘法的原理考虑一个简单的情况,假设我们有一组数据点(x1, y1), (x2, y2), … , (xn, yn),我们想要用一条直线y = ax + b来拟合这些数据。
最小二乘法的目标是找到最优的参数a和b,使得拟合后的直线与数据点之间的残差平方和最小。
为了求解最优参数,可以通过最小化残差平方和的方式来进行。
具体来说,可以定义一个损失函数,即残差平方和的平均值,如下所示:J(a, b) = (1/n) * Σ(yi - (axi + b))^2其中,n表示数据点的个数,xi和yi分别表示第i个数据点的横坐标和纵坐标。
通过最小化这个损失函数,可以得到最优的参数a和b。
对于更复杂的情况,比如需要拟合高阶曲线,最小二乘法的原理类似,只是拟合模型不同。
还可以通过增加更多的参数来适应更复杂的曲线形状。
3. 使用Python进行最小二乘法曲线拟合在Python中,使用最小二乘法进行曲线拟合非常方便,可以使用scipy库的optimize模块中的curve_fit函数来实现。
我们需要导入必要的库:import numpy as npfrom scipy.optimize import curve_fitimport matplotlib.pyplot as plt我们可以定义拟合的数学模型。
以拟合一条指数函数为例,定义一个指数函数的模型:def func(x, a, b, c):return a * np.exp(-b * x) + c接下来,我们可以生成一组测试数据:x = np.linspace(0, 4, 50)y = func(x, 2.5, 1.3, 0.5)使用curve_fit函数进行曲线拟合:params, params_covariance = curve_fit(func, x, y)我们可以绘制原始数据和拟合曲线的图像:plt.plot(x, y, 'bo', label='Original Data')plt.plot(x, func(x, params[0], params[1], params[2]), 'r-', label='Fitted Curv e')plt.legend()plt.show()4. 个人观点和总结最小二乘法在数据分析和曲线拟合中被广泛应用,其原理简单而有效。
最小二乘法曲线拟合_原理及matlab实现
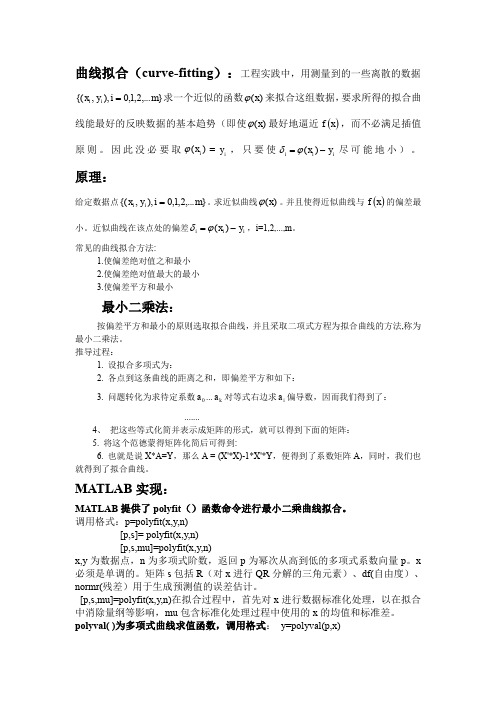
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了: .......4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个范德蒙得矩阵化简后可得到:6. 也就是说X*A=Y ,那么A = (X'*X)-1*X'*Y ,便得到了系数矩阵A ,同时,我们也就得到了拟合曲线。
MATLAB 实现:MATLAB 提供了polyfit ()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y 为数据点,n 为多项式阶数,返回p 为幂次从高到低的多项式系数向量p 。
x 必须是单调的。
矩阵s 包括R (对x 进行QR 分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 1 页/共 19 页
目录
第一章 Gauss 消去法„„„„„„„„„„„„3 第一节 第二节 第三节 第四节 线性代数方程组数值解法„„„„„3 选主元„„„„„„„„„„„„„5 Gauss 消去法„„„„„„„„„„6 C 语言实现 Gauss 消去法„„„„„8
第二章 直线拟合„„„„„„„„„„„„„10 第三章 M 次代数曲线拟合„„„„„„„„„12 第四章 曲线拟合„„„„„„„„„„„„„13 第五章 C 语言实现 M 次代数曲线拟合„„„„13 第六章 论文总结„„„„„„„„„„„„„18
x1 2 x2 2 x3 1, x1 x2 x3 1, 2 x 2 x x 1, 2 3 1
取初值为零向量迭代二次
三、逐次超松弛迭代(SOR 迭代)松弛法实质是高斯—塞德尔迭代的
一种加速方法,它将前一步的结果与高斯—塞德尔迭代值适当加权平均,以期望 得到更好的近似值:
k k 1
考察解(1.1)的 Jacobi 迭代(1.2) ,一般地说,
k 1 k k 1 k , x2 ,而用 x1 , x2
迭代后的新值比前一次的旧值更精确些。Gauss 和 Seidel 充分利用这个信息,在
,而用 x1 ;在求 x3 时,不再用 x1
第 4 页/共 19 页
xi k 1
1 aii
i 1 n k 1 b a x aij xjk i ij j j 1 j i 1
xi
k 1
xi
k 1
1 xi
k
xi( k 1) (1 ) xi( k )
若 ai k m, 则 m a .i i; k l
若l k , 则交换 k a和 a j , k k 1 , j i,j 交换 , n ; 和 k b
l
b
步4 返回主模块 程序 1.1 {max=a[k][k]; for(i=k+1;i<n;i++) if(fabs(max)<fabs(a[i][k])) {max=a[i][k]; l=i; } if(max==0) q=1; else
输入 输出 步1 步2 步3
ai j, i, j ai j, i, j
k , k 1, k , k 1,
, ni ; b, i , ni ; b, i
k , k 1, k , k 1,
,n . ,n .
m akk ; l k.
对i k 1, k 2 ,
执行 ,n
一、Jacobi 迭代:对一般形式的三元线性代数方程组
a11 x1 a12 x2 a13 x3 b1 a21 x1 a22 x2 a23 x3 b2 a x a x a x b 31 1 32 2 33 3 3
1.1
设aii 0, i 1, 2,3, 从上面三个方程分别解出x1 , x2 , x3 : 1 a12 x2 a13 x3 b1 x1 a 11 1 a21 x1 a23 x3 b2 x2 a22 1 a31 x1 a32 x2 b3 x3 a33 按下列方式写出迭代公式 k 1 a12 x2 k 1 a13 x3 k 1 b1 x1 a11 k 1 k 1 k 1 a21 x1 a23 x3 b2 x2 a 22 k 1 a31 x1k 1 a32 x2 k 1 b3 x3 a33
1.2
称(1.2)为(1.1)的Jacobi迭代公式。
(1.1)和(1.2)可分别简写为 ai1 x1 ai 2 x2 ai 3 x3 bi i 1, 2,3 和
3 k 1 bi aij x j j 1, j i 对n元线性代数方程组
数akk 在Gauss消去法中有着突出的作用,称为约化的主元。第k步消元时
k 1
k 1 k 1 k 1 要用akk 作除数,如果akk =0消元会失败,即使主元akk 0,但很小时,舍入误差也会
使计算结果面目全非,这是Gauss消去法的一个严重缺陷,避免这类情况发生的基本方法是 “选主元” 算法 1.1:选列主元子模块 功能 选列主元
按下列方式写出迭代公式
xi k
n 1 k 1 aij x j bi aii j 1, j i
i 1, 2,3
, n
1.4
(1.4)即为(1.5)的 Jacobi 迭代公式。
二、Gauss-Seidel 迭代
求 x2 时,不再用 x1
第 2 页/共 19 页
第一章
Gauss 消去法
解线性代数方程组是计算数学的基本问题。 其困难在于解大规模线性代数方 程组时,不仅计算量大,而且舍入误差的影响使问题变得十分复杂。
第一节 线性代数方程组数值解法
解线性代数方程组的方法很多, 重点是个人的喜好不同, 会选择不同的解法。 这里介绍的是迭代法和消去法。
xi
k
1 aii
i 1, 2,3
第 3 页/共 19 页
a x
j 1 ij
n
j
bi (i 1, 2,3,„n),
1.3
从第i个方程中解出
xi
n 1 aij x j bi aii j 1, j i
i 1, 2,
, n ,
1.5
称(1.5)为解(1.1)的 Gauss-Seidel 迭代公式。 同理,我们也可以导出解(1.3)的 Gauss-Seidel 迭代公式
xi k
n 1 i 1 k a x aij x (jk 1) bi ij j aii j 1 j i 1
i 1, 2,3,
, n
1.6
Gauss-Seidel 迭代是充分利用新值建立起来的迭代公式, 所以, 一般情况下, 它比 Jacobi 迭代收敛快。但这也不是绝对的,在某些情况下,Gauss-Seidel 迭代 比 Jacobi 迭代收敛慢,甚至可举出 Jacobi 迭代收敛而 Gauss-Seidel 迭代发散的例 子:
k k
计算;从而建立了计算公式 k 1 k 1 k 1 a12 x2 a13 x3 b1 , x1 a 11 k 1 k 1 a21 x1 k a23 x3 b2 x2 a 22 k 1 k a31 x1 k a32 x2 b3 x3 a33
副标题:求解线性方程组和曲线拟合
摘要:本论文主要涵盖 Gauss 消去法、列主元模块、求解 线性方程组、Jacobi 迭代、逐次超松弛(SOR)迭代、直 线拟合、M 次多项式拟合、曲线拟合等方面的知识点
电科 081 班 鲁冬梅 学号 080712110088
2011/11/29
曲线拟合的最小二乘法
i 1 n ( k 1) b a x aij x (jk ) i ij j aii j 1 j i 1
式中系数 W 称为松弛因子,为保证迭代收敛,要求0 2
第二节 选主元
由于下一节将要讲述的 Gauss 消去法中应用到选主元的知识, 所以这一节我 们将讲述选主元的相关知识。
记 aij aij i, j 1, 2,3, 4 , b1 b1
0 0
第 6 页/共 19 页
步1.把 1.7 1 写成 1.81 , 从(1.7) i中消去x1 :
0 0 0 0 a11 x1 a12 x2 a13 x3 a14 x4 b1 0 1 1 1 1 a22 x2 a23 x3 a24 x4 b2 1 1 1 1 a32 x2 a33 x3 a34 x4 b3 1 1 1 1 a42 x2 a43 x3 a44 x4 b4
ai1
0 0
a11
1.7 1 1.7 i 得 1.8i i 2,3, 4
1.8
步 1 的计算公式:
0 0 0 0 aij ai1 a11 a1 j aij i, j 2,3, 4 ; 1 0 0 0 0 i 2,3, 4 . bi ai1 a11 b1 bi 1
函数有三种表示法:解析式,函数表和图像法。当 f x 的解析式 很复杂,或者只知道的 f x 一个函数表时,直接研究 f x 很困难,一 个自然的想法是用一个易于计算的简单函数作为 f x 的近似函数 (去 逼近 f x ) ,然后通过研究这个简单函数得到关于 f x 的有关信息。 本论文详细介绍曲线拟合的最小二乘法,并编程实现之(采用 C 语 言) 。 19 世纪初,Gauss 研究天文时独立于 Legender 发明了最小二乘 法,他在 1812 年给 Laplace 的信中写到:自 1802 年起几乎每天用最 小二乘法计算新行星轨道。从 Gauss 开始,200 多年来,最小二乘法 一直是科技工作者整理实验数据、建立数学模型的有力工具。 本论文分为五章:第一章主要介绍 Gauss 消去法。因为本论文中 的 M 次代数曲线拟合需要解线性代数方程组。综合各个算法的特点, 为了求解的方便,故选择 Gauss 消去法。第二章到第四章,分章介绍 不同的拟合知识。第五章则具体的介绍 M 次代数曲k) {temp=b[l][0];b[l][0]=b[k][0];b[k][0]=temp; for(j=k;j<n;j++) {temp=a[l][j];a[l][j]=a[k][j];a[k][j]=temp; } }