CP6报警
PCS-922N_X_说明书_国内中文_南网标准版_X_R1.10_(ZL_FZBH5123.1208)

警告!
为增强或修改现有功能,装置的软硬件均可能升级,请确认此版本使用手册和您购买的产品相 兼容。
警告!
电气设备在运行时,这些装置的某些部件可能带有高压。不正确的操作可能导致严重的人身伤 害或设备损坏。
电话:025-87178185、传真:025-8718208
我们保留在不事先通知的情况下进行技术改进的权利。
电子信箱:nr_techsupport@
南京南瑞继保电气有限公司 公司地址:中国南京江宁区苏源大道 69 号 邮编 211102 公司网址:
1.1 应用范围 ...........................................................................................................................1 1.2 保护配置 ...........................................................................................................................1 1.3 性能特征 ...........................................................................................................................1 1.4 订货须知 ...........................................................................................................................2 1.5 产品执行标准 ....................................................................................................................2 第 2 章 技术参数 ............................................................................................................................3 2.1 电气参数 ...........................................................................................................................3 2.2 机械结构 ...........................................................................................................................4 2.3 环境条件参数 ....................................................................................................................4 2.4 通信端口 ...........................................................................................................................4 2.5 保护专用通道光口.............................................................................................................5 2.6 型式试验 ...........................................................................................................................6 2.7 认证 ..................................................................................................................................7 2.8 故障录波和事件记录 .........................................................................................................7 2.9 保护功能 ...........................................................................................................................7 第 3 章 软件工作原理 .....................................................................................................................9 3.1 保护程序结构 ....................................................................................................................9 3.2 装置总启动元件 ................................................................................................................9 3.3 保护启动元件 ..................................................................................................................10 3.4 短引线差动保护 ..............................................................................................................10 3.5 线路充电保护 .................................................................................................................. 11 3.6 CT 断线判别 .................................................................................................................... 11 3.7 保护逻辑方框图 ..............................................................................................................12 3.8 跳闸逻辑 .........................................................................................................................12 3.9 正常运行程序 ..................................................................................................................12
SMT贴片机操作员培训教材

• 17、 PUSH RESET PB
PARTS END 注释:请按复位开关(元 件已用完)
处理:将打完料的飞达重 新装料后按复位键解除报 警即可开机。
松下MPA3
• 1、V-AXIS MINUS LIMIT
• 注释:V轴超出负极限 • 处理:通知技术员处理。
• 2、MARK(BINARY)
ESTIMATION-VALIUE
• 注释:气压感应器报警, 是否忽略?
• 处理:点OK键继续生产, 点CANCLE键待气压恢复 正常后开始生产。
• 4、ORIGIN RETRIEVAL HAS NOT YET BEEN COMPLETED。
• 注释:原点动作尚未完 成
• 处理:点确认键消除报 警,按原点键机器开始 归零。
• 5、INITIALIZING
• 1、机器运行中切勿将安 全盖打开,并将头手伸 入高速运行的机内,以 免发生危险。
• 2、不得将手或身体其他 部位靠在飞达上,以免 损坏飞达。
• 3、机器运行中不得拆 卸或安装飞达,以免 事故的发生。
• 4、机器运行中不得将料 带伸出飞达至机外,必须 卷入料盘并装在飞达内, 避免卡坏飞达盖甚至装坏 吸嘴。
• 注释:机器正在回原点中, 请等待。
• 6、PWB CONVEYING
ERROR
• 注释:PCB传送错误
• 处理:点OK键消除报警 信息后检查PCB后重新开 机。
• 7、DECTED FRONT FEEDER FLOAT。
• 注释:飞达翘高报警
• 处理:查出翘高飞达并 重新装好。
• 8、RETRY LIST(NO COMPONENT)
• 正确的安装(下图):
• 7、飞达尾部未安装到位 (FUJI)
PMC-651T配电变压器保护测控装置用户说明书_V5.2

我们已经检查了本手册关于描述硬件和软件保持一致的内容。由于不可能完全消除差错,所以我们不 能保证完全的一致。本手册中的数据将定期审核,并在新一版的文件中做必要的修改,欢迎提出修改建议。 以后版本中的变动不再另行通知。
PMC-651T专业人士进行安装,对于因不遵守本手册的说明所引起 的故障,厂家将不承担任何责任。
重要提示 感谢您使用深圳市中电电力技术股份有限公司的产品。为了安全、正 确、高效地使用本装置,请您务必注意以下重要提示: 1) 本说明书仅适用于 PMC-651T 配电变压器保护测控装置。 2) 请仔细阅读本说明书,并按照说明书的说明设置、测试和操作。如 有随机资料,请以随机资料为准。 3) 为防止装置损坏,严禁带电插拔装置各插件、触摸印制电路板上的 芯片和器件。 4) 请使用合格的测试仪器和设备对装置进行试验和检测。 5) 装置如出现异常,请及时与本公司售后技术服务(400-8860-418) 联系。 6) 本装置的设置缺省密码是:0000。
2 技术指标...................................................................................................................................................................3 2.1 工作环境条件.............................................................................................................................................. 3 2.2 额定参数.......................................................................................................................................................3 2.3 准确度...........................................................................................................................................................3 2.4 遥信分辨率.................................................................................................................................................. 5 2.5 过载能力.......................................................................................................................................................5 2.6 继电器输出.................................................................................................................................................. 5 2.7 开关量输入.................................................................................................................................................. 5 2.8 外壳防护等级(IP).................................................................................................................................. 5 2.9 端子螺丝紧固力矩...................................................................................................................................... 5 2.10 电气绝缘性能............................................................................................................................................ 5 2.11 机械性能.....................................................................................................................................................6 2.12 电磁兼容性能............................................................................................................................................ 6
CP6 系列维修事例

CP 19st Alarm1. 如何更换ST18的皮带(调SERVO为0)a. backup proper datab. remove dogc. lower gain value to 150 (Cn04=350) by digital operatord. remove belte. zero-set (用钢尺或拆下来的 dog 挡 Zero-set Sensor 一下)f. 保持 Servo-on 装皮带,让 motor 处于水平.测皮带张力(142 ± 5 Hz).g. Attach zero-set flag (dog) in center of sensor.h. Gain → 350i. Zero-set (- + F6)j. 测 NC origin position (± 300 之内) 并 set. @ 128° motor/clutch 啮合完好具体操作如下:(保持 servo on)a). set → proper → FQ/FRQ/NC (可看到NC原始值,如12) → return 主界面b). 进入I/O,在output中找到Y02A,使其为ON, return 主界面c). 进入servo,可看到NC=12,按数字键4,切换到NC,按旋转键,这时ST18电机转动,带动clutch转动,同时NC的值也随之变化(要小范围变化,为下一步做准备,即使clutch正确啮合)d). 按数字键 1 ,切换到CAM,按 (F+旋转)键,确认clutch是否正确啮合,若不是,请重复c)和d),直至clutch正确啮合.记住此时的NC值,如为35.进入FQ/FRQ/NC →NC →origin ,确认此时的NC是否仍为35,是则按set.e).k. 收proper datal. idle 运行故障描述:贴装无规则偏,甚至有的板子全部贴乱解决过程及方法:1检查机器的硬件(吸嘴和支撑),校准一遍吸料高度,2传了一遍status data.proper data和程序,重启机。
浪潮英信服务器NF5280M4用户手册V1.0
4 BMC 设置 ........................................................................................................................ 50 4.1 简介................................................................................................................... 50 4.2 功能模块............................................................................................................ 51 4.3 Web 界面介绍 ................................................................................................... 52 4.4 远程控制............................................................................................................ 56 4.5 电源和散热 ........................................................................................................ 57 4.6 BMC 设置.......................................................................................................... 59 4.7 日志................................................................................................................... 62 4.8 故障诊断............................................................................................................ 64 4.9 系统维护............................................................................................................ 65 4.10 命令行功能介绍............................................................................................... 66 4.11 时区表 ............................................................................................................. 71
CP6系列设备维修指导
FUJI之CP6系列设备维修指导序言因我刚学SMT不久,在SMT之家学到了很多,发现各位大侠的见解和分析都非常的精辟,不过,有时设备出现故障时,要找到相关的见解,大部分都能找到,却要一阵好找,故从SMT之家FUJI论坛里收集各位大侠一些相同设备出现的维修指导,以供像我一样的初学者学习,里面也有一些不够完美,完全没有答案,希望前辈们多多指教,补正上去,多谢了,(注:收集内容有所改动,且未能把前辈们的侠名注上,深感不安,在此向前辈们致敬!)-----luzp整编目录一、CP6控制及辅助系统 3二、关于CP643E问题 3三、CP6没法回原点 3四、CP642 机器故障 4五、CP643E开机出现SERVO AMP ALARM 10六、FUJI Mount 故障 10七、CP642 的抛料 11八、CP643E机器死机后数据的收集方法 11九,FUJICP6麻烦事情 12 十、cp642开机后屏幕显示的vision2.94是什么意思呀 12 十一、CP6 轨道宽度校正方法 12 十二、FCP6、CP642保养作业手顺书 12 十三、CP642、CP643 X轴BALL SCREW改造工程 22 十四、CP643 X_Y TABLE UP/DOWN 新型CHECK SENSOR 注意事项 25 十五、CP643系列NEW YTPECONV.CULT.CHK.LEFT SENSOR AMP.调整方法 25十六、CP643 X轴电机更换步骤 26 十七、CP-643 Parameter List参数设定 26 十八、凸轮箱皮带更换方法34内容一、CP6控制及辅助系统CP6贴片机控制系统包括:1、CPU板执行贴片机控制所需计算,内存中存储有程序及设备固有数据2、操纵板用于控制、调整设备运行监视屏3、视觉处理板执行视觉处理功能,并进行坐标修正计算,与将处理分析结果与CPU通讯,将元器件图像输出给监视器4、伺服板控制各工作轴的伺服放大器5、I/O板实现贴片机与CPU板之间的信号输入/输出中继6、SCSI板该板插槽内插有一块存储卡,用于存储视觉处理程序7、MP板该板插槽内插有一块存储卡,用于存储贴片机控制程序8、程序器与I/O板联合工作,以特定的顺序处理输入/输出信号9、伺服放大器控制该轴伺服马达10、伺服马达驱动各伺服轴(X. Y. Z. D1. D2. FQ. FRQ. NC. C)请教上位楼主(校友)及各位大虾,对于工作轴X. Y. Z. D1. D2. FQ. FRQ. NC. C,本人除了了解X. Y. Z.外其它不清楚,请问其余分别指的是什么?D1.D2 代表2个table axis二、关于CP643E问题问题:CP643E开机之后VISION BOOTING正常,就是在VISION启动之后不显示回…ZERO SETING‟的命令并且显示:SERVO ALARM,查所SERVO PACK均正常显示bb,更换CPU卡等无效,请各位帮忙!建议:你检查一下SERVO PACK 的接线是不是有问题,主要是OUTPUT终于找到了!昨天又找了一遍连线换了很多卡和扳子,最后一弟兄想起前几天做过PM有吸尘器给BOX除过尘,终于找到了一个SERVO PACK下面的开关被碰掉了三、CP6没法回原点问题:CP6机有这样一个问题,每次关电源后开机很麻烦,没法回原点.现象是这样的,开机按启动回原点,各轴都跑向原点移动,惟有C轴,晃了一晃就停下来了,屏幕显示一直就这样等待着,什么警都不报,10几分种还是这样.本人怀疑是12站的SENSOR有问题,光纤插拔一下,关电再开机,重复几次又可以了.但每次关电又是这样.这到底是怎么回事.解答:我前些时候也碰到这问题,请打开前面的盖子(FRONT DOOR),在右上方有一个缺口,里面有一个ㄇ字型SENSOR,感应着一个轮盘,若是轮盘转一圈SENSOR都不会亮,把它换新(也许是接触不良)那个是CAM-axis回零点sensorI/O MapX03E 0 CAM ZERO POS.当铁板遮住sensor时红灯要熄灭才是正常用BYPASS KEY将安全门打开,回零仔细观察机器内部哪个轴到零点SENSOR 后还不能停下来,检查此处SENSOR和AMP,必要时调整AMP可能是10ST OR 12ST 回不到原点所致,这时打开前安全门,可以看到PQ或PRQ马达在一直转,调整一下这两个轴的原点Sensor AMP即可疑问:第12站φ Sensor AMP怎么调?是不是数字显示的那种??四、CP642 机器故障问题:C P642 机器故障报警:servo amp alarm检查:1.X axis 伺服的保险丝已经烧了. 更换保险丝,故障依旧.2.发现伺服已坏,有明显的烧焦味道;3.换伺服.疑问:请问,这一解决问题的过程中,还有那些要注意的事项和细节???建议:Servo AMP 的参数有必要检查一下, 我指的参数是CPU BOX 中的那张纸上对SERVO AMP 的参数, 用DIGITAL OPERATOR 来检查.更换电容,在伺服放大器的电源附近。
横河资料 功能块

CS 1000/CS 3000ReferenceFunction Block Details 功能块详细说明CONTENTS 目录PART-C Function Block Common C部分功能块C1. Structure of a Function Block ..................................................C1-1 功能块的构成C2. I/O Connection ..........................................................................C2-1 输入输出连接C2.1 Data Connection ........................................................................................... C2-3 数据连接C2.2 Terminal Connection................................................................................... C2-13 未端连接C2.2.1 Connection between Function Blocks ........................................... C2-14 功能块之间的连接C2.2.2 Connection by a Switch Block (SW-33, SW-91) ............................ C2-16 开关模块的连接C2.3 Sequence Connection ................................................................................ C2-19 序列连接C2.4 Connection between Control Stations....................................................... C2-22 控制点的连接C2.5 I/O Connection Information ........................................................................ C2-25 输入输出连接信息C3. Input Processing ......................................................................C3-1 输入处理C3.1 Input Signal Conversion ............................................................................... C3-5 输入信号的变换(转换)C3.1.1 Input Signal Conversions Common to Regulatory Control Blocksand Calculation Blocks ................................................................... C3-7 一般的输入信号到普通控制块和计算快C3.1.2 Input Signal Conversion for Logic Operation Blocks ...................... C3-19 输入信号连接逻辑运算快C3.2 Digital Filter ................................................................................................. C3-20 数字滤波C3.3 Integration ................................................................................................... C3-23 整合C3.4 PV/FV/CPV Overshoot ................................................................................ C3-26 Pv/fv/cpv 溢出C3.5 Calibration ................................................................................................... C3-28校准C3.6 Input Proce ssing in the Unsteady State .................................................... C3-30 动态的输入处理(操作)C3.6.1 Input Processing of the Regulatory Control Block inUnsteady State ........................................ C3-32普通控制块的动态的输入处理C3.6.2 Input Processing of the Calculation Block in Unsteady State ......... C3-34 动态的计算块输入处理C3.7 Input Proce ssing for Sequence Connection ............................................. C3-38 顺序快的输入处理C4. Output Processing....................................................................C4-1 输出处理(操作)C4.1 Output Limiter ............................................................................................... C4-8 输出限制C4.2 Output Velocity Limiter ............................................................................... C4-11 输出变化限制C4.3 Output Clamp .............................................................................................. C4-12 输出固定C4.4 Pre set Manipulated Output......................................................................... C4-19 预设操作输出C4.5 Output Tracking .......................................................................................... C4-21 输出跟踪C4.6 Output Range Tracking ............................................................................... C4-25 输出范围跟踪C4.7 Manipulated Output Index .......................................................................... C4-28 操作输出指示C4.8 Output Signal Conversion .......................................................................... C4-29 输出信号转换C4.8.1 No-Conversion ............................................................................. C4-32C4.8.2 Pulse Width Output Conversion .................................................... C4-36 脉冲输出转换C4.8.3 Communication Output Conversion .............................................. C4-42 通讯输出的转换C4.8.4 Output Signal Conversion of Logic Operation Blocks .................... C4-43 输出信号转换到逻辑运算块C4.9 Auxiliary Output .......................................................................................... C4-44 辅助输出C4.10 Output Proce ssing in Unsteady State ....................................................... C4-48 动态的辅助输出C4.11 CPV Pushback ............................................................................................ C4-49 运算输出协议C4.12 Output Proce ssing in Sequence Connection ............................................ C4-52 顺序连接的输出处理C5. Alarm Processing – FCS .........................................................C5-1报警处理C5.1 Input Open Alarm Check .............................................................................. C5-6 输入开路报警检查C5.2 Input Error Alarm Check ............................................................................... C5-8 输入误差报警检查C5.3 Input High-High and Low-Low Limit Alarm Check .................................... C5-10 输入高高限或者低低限报警检查C5.4 Input High and Low Limit Alarm Check ..................................................... C5-13 输入高限或者低限报警检查C5.5 Input Velocity Alarm Check ........................................................................ C5-16 输入点报警检查C5.6 Deviation Alarm Check ............................................................................... C5-19 偏差报警检查C5.7 Output Open Alarm Check ......................................................................... C5-24 输出开路报警检查C5.8 Output Fail Alarm Check ............................................................................ C5-26 输出故障报警检查C5.9 Output High and Low Limit Alarm Check .................................................. C5-27 输出高限或者低限报警检查C5.10 Bad Connection Status Alarm Check ........................................................ C5-29 C5.11 Proce ss Alarm Message ............................................................................. C5-30 过程报警报告C5.12 System Alarm Message 系统报警报告................................................. C5-31C5.13 Deactivate Alarm Detection 取消的报警监测............................................C5-32C5.14 Alarm Inhibition (Alarm OFF) 禁止的报警.................................... C5-33C5.15 Classification of Alarm Actions Based on Alarm Priority ......................... C5-35 分类的报警优先权限C5.15.1 Alarm Display Flashing Actions 报警显示闪光动作.................. C5-36C5.15.2 Repeated Warning Alarm 重复报警................................................ C5-38 C5.16 Alarm Processing Levels 报警处理的色彩级别 ................................... C5-39 C6. Block Mode and Status 模块的模式和状态....................C6-1 C6.1 Block Mode 块模式.................................................................. C6-2 C6.1.1 Basic Block Mode 基本块模式............................................... C6-3C6.1.2 Compound Block Mode 复合块模式....................................... C6-5C6.1.3 Block Mode Transition模块变换...................................... C6-13C6.1.4 Block Mode Change Command模块更改命令. ............................ C6-20C6.1.5 Block Mode Transition Condition模块转型的条件 ........... C6-21C6.2 Block Status................................................................................ C6-27C6.3 Alarm Status ................................................................................................ C6-28C6.4 Data Status .................................................................................................. C6-32C7. Process Timing ........................................................................ C7-1C7.1 Process Timing for Regulatory Control Block ............................................ C7-3 C7.1.1 Scan Period .................................................................................... C7-4C7.1.2 Order of Process Execution ............................................................ C7-7C7.1.3 Timing of Process I/O ................................................................... C7-11C7.1.4 Control Period for Controller Block ................................................ C7-26C7.2 Process Timing of Calculation Block......................................................... C7-30C7.3 Process Timing for Sequence Control Block ............................................ C7-35 C7.3.1 Execution Timing for Sequence Control Blocks ............................. C7-36C7.3.2 Output Timing of Sequence Table Blocks (ST16, ST16E).............. C7-40C7.3.3 Output Timing of a LC64 Logic Chart Block ................................... C7-41C7.3.4 Combination of Execution Timing and Output Timing .................... C7-42C7.3.5 Control Period and Control Phase for Sequence Table Blocks(ST16, ST16E).............................................................................. C7-43C7.3.6 Control Period and Control Phase for Logic Chart Block (LC64) .... C7-45C1. Structure of a Function Block 功能块结构A function block consists of the following components:一个功能块包括以下部分• Input and output terminals that exchange data with devices outside of the external function block输入和输出终端,与外部设备交换数据的外部功能块• Four processing functions of input processing, calculation processing, output processing, and alarm processing四个处理功能的输入处理,计算处理,输出处理,并报警处理• Constants and variable data used to execute processing functions. Especially,an abbreviated name called “data item” is assigned to data that is referenced orset during the operation.常量和变量用来执行数据处理功能。
FUJI CP643&CP6 st17 st19报警分析
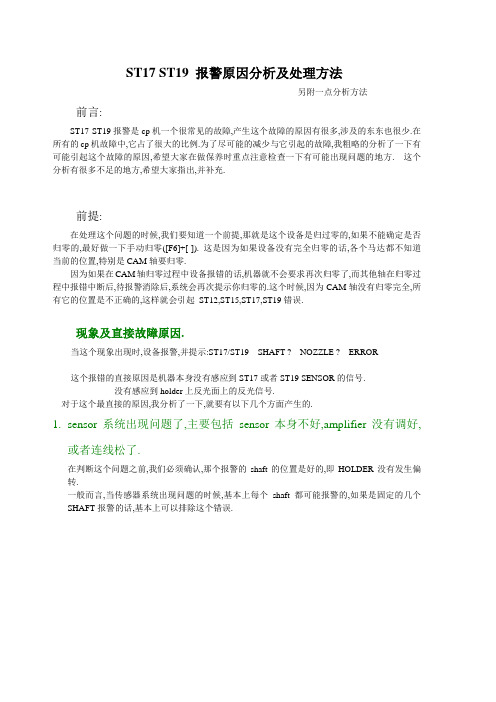
ST17 ST19 报警原因分析及处理方法另附一点分析方法前言:ST17 ST19报警是cp机一个很常见的故障,产生这个故障的原因有很多,涉及的东东也很少.在所有的cp机故障中,它占了很大的比例.为了尽可能的减少与它引起的故障,我粗略的分析了一下有可能引起这个故障的原因,希望大家在做保养时重点注意检查一下有可能出现问题的地方. 这个分析有很多不足的地方,希望大家指出,并补充.前提:在处理这个问题的时候,我们要知道一个前提,那就是这个设备是归过零的,如果不能确定是否归零的,最好做一下手动归零([F6]+[-]). 这是因为如果设备没有完全归零的话,各个马达都不知道当前的位置,特别是CAM轴要归零.因为如果在CAM轴归零过程中设备报错的话,机器就不会要求再次归零了,而其他轴在归零过程中报错中断后,待报警消除后,系统会再次提示你归零的.这个时候,因为CAM轴没有归零完全,所有它的位置是不正确的,这样就会引起ST12,ST15,ST17,ST19错误.现象及直接故障原因.当这个现象出现时,设备报警,并提示:ST17/ST19 SHAFT ? NOZZLE ? ERROR这个报错的直接原因是机器本身没有感应到ST17或者ST19 SENSOR的信号.没有感应到holder上反光面上的反光信号.对于这个最直接的原因,我分析了一下,就要有以下几个方面产生的.1.sensor系统出现问题了,主要包括sensor本身不好,amplifier没有调好,或者连线松了.在判断这个问题之前,我们必须确认,那个报警的shaft的位置是好的,即HOLDER没有发生偏转.一般而言,当传感器系统出现问题的时候,基本上每个shaft都可能报警的,如果是固定的几个SHAFT报警的话,基本上可以排除这个错误.ST17,ST19传感器结构图ST17,ST19 传感器系统结构原理ST17,ST19 传感器系统是一样的,都有三个光电传感器组成的,三个传感器的组合可以组成8中不同的序列, 而CP643上每个HOLDER上面都有6个吸嘴,通过这三个传感器设备就可以区分每个吸嘴的型号了.每个吸嘴对应的序列号如下:ST17 为当前吸嘴转换前的检测机构. 比如系统下一部要使用2号吸嘴,那么它需要检测确认一下当前的吸嘴再确定ST18 nozzle change 转多少角度,ST17没有唯一性,只要它检测到的序列号符合上面表中6中吸嘴的一种就可以了. 而ST19是检测吸嘴转换后的吸嘴型号是否和系统要求的一致,它是唯一的,这里只有当检测到2号吸嘴的序列码时它才可以,. 故很多时候ST17没有报警而ST19肯定要报的原因就在这里.1.1: 处理方法:先归零,选一个好shaft ,将NOZZLE转到2号吸嘴,并将给shaft转动相应位置(如果st17报警,就转动ST17位置,如果ST19报警就转到ST19位置).将cam转动200度,看放大器读数,是不是为090.如果这个值正确,然后进入I/O里面查看状态是否和放大器上的相同. 看完2号吸嘴后,再将吸嘴转到6号吸嘴,看放大器的状态数值是不是909,如是再查看I/O 对比.I/O中的状态只有两种,一种是ON,另一种是OFF,而放大器上面的数值为0,1…9.放大器上面的读数是表示灵敏度的强弱,一般而言0---4是对表OFF状态,5—9代表ON正常的话,OFF状态下放大器的读数应该是0,1也可以接受,当超过3时就要调放大器灵敏度了.同理,ON 状态下放大器数值应该为9,8也可以接受,低于0.7的就要调节放大器灵敏度了.放大器的灵敏度的调节可以参考相关资料.另外一种情况是传感器的位置松动了.2.传感器感应系统太脏了,包括holder反光面太脏,或者SENSOR太脏,另外也有可能holder本身有问题了.如果系统报警集中在固定的几个SHAFT上面的时候,很可能是holder的反光面太脏了,特别是保养之后.这个我们只要檫洗holder的反光面就可以了.如果檫干净之后,该shaft还报错的话,我们可以和其他shaft对换一个holder看看,到底故障有没有转移,如果转移了,就更换holder.另外的情况就是,很多SHAFT 都报警的话,也有可能是SENSOR太脏了,同样只要檫一下就可了.注意: 以上两条是建立在报错时, 报错SHAFT的holder 的位置处于正常位置,没有发生角度偏转,如果ST17报警的时候不好判断的话,可以将该SHAFT转动ST19的位置在判断该shaft的位置是否正确.3.HOLDER本身没有转到正确位置,它与正确位置错了一个角度,从而造成SENSOR感应不到.这种情况的原因是多方面的了,大致有一下几种:3.1ST12 meshing check sensor 没有调好.主体表现的现象是,在CAM轴归零的时候,所有位置不对的shaft 不会在ST12站转到正确的位置,从而当该SHAFT转动ST17的时候就报警.判断ST12 meshing check sensor好坏的方法: 将ST11站的shaft 故意转偏,然后手摇cam 轴摇到200度,这个时候,一定要保证,st12上面的clutch和shaft上的clutch 不能啮合.然后看ST12 meshing check sensor 放大器上的读数是不是为9,如果这个数值低于7,就要调整sensor 了.ST12 meshing check sensor的调整方法可以参考相关资料.3.2ST12 clutch origin sensor 太脏,或者这个sensor 出了问题了.判断方法:先将该传感器檫干净,然后将CAM轴转动200度,然后在手工转ST12位置上的shaft,当sensor发出的光线对正shaft上面的clutch上面的小点的时候看放大器上的读数,看是否正确.3.3shaft本身比较脏,引起转不到位一般有两个位置脏会引起ST17,ST19报错. 一个是shaft 上面的clutch 外表面,另外一个地方是clutch与大齿轮连接的地方,要把shaft向下拉的时候才能保养.3.4shaft 本身发生磨损,或者shaft上面的holder和clutch不同步.判断这个问题的时候,我们可以手工转动shaft,看有没有很阻塞的感觉,如果有那种坑坑洼洼的很厉害的感觉的话,基本上是shaft有点磨损了,需要保养了, 对于后一种情况,我们可以用校准工具可以检查,到底holder和shaft的clutch是不是同步的.3.5ST13 的皮带磨损了.ST13的皮带磨损的话,就会造成生产过程中shaft角度回转不准,从而是shaft 回不到原位,造成ST17,ST19报警. 判断这个皮带是否磨损的话,可以看看皮带的张力是否够,然后将cam轴转几个角度,再测测皮带的张力. 如果皮带磨损严重,就要及时更换, 皮带的更换方法和ST13校准可以参考相关的资料.3.6ST13 电磁阀,气缸不好也会造成ST17,ST19报警的.这里的电磁阀和气缸包括上下的气缸和转角度的长气缸.。
西门子 NXGPro+ 控制系统手册_操作手册说明书
3.4
单元通讯的协议 ............................................................................................................ 36
3.5
NXGpro+ 高级安全 .......................................................................................................37
3.2
功率拓扑 ......................................................................................................................34
3.3
控制系统概述 ...............................................................................................................35
NXGPro+ 控制系统手册
NXGPro+ 控制系统手册
操作手册
AC
A5E50491925J
安全性信息
1
安全注意事项
2
控制系统简介
3
NXGPro+ 控制系统简介
4
硬件用户界面说明
5
参数配置/地址
6
运行控制系统
7
高级的操作功能
8
软件用户界面
9
运行软件
10
故障和报警检修
11
FUJI之 CP6系列设备维修指导
FUJI之CP6系列设备维修指导序言因我刚学SMT不久,在SMT之家学到了很多,发现各位大侠的见解和分析都非常的精辟,不过,有时设备出现故障时,要找到相关的见解,大部分都能找到,却要一阵好找,故从SMT之家FUJI论坛里收集各位大侠一些相同设备出现的维修指导,以供像我一样的初学者学习,里面也有一些不够完美,完全没有答案,希望前辈们多多指教,补正上去,多谢了,(注:收集内容有所改动,且未能把前辈们的侠名注上,深感不安,在此向前辈们致敬!)-----luzp整编目录一、CP6控制及辅助系统 3二、关于CP643E问题 3三、CP6没法回原点 3四、CP642 机器故障 4五、CP643E开机出现SERVO AMP ALARM 10六、FUJI Mount 故障 10七、CP642 的抛料 11八、CP643E机器死机后数据的收集方法 11九,FUJICP6麻烦事情 12十、cp642开机后屏幕显示的vision2.94是什么意思呀12十一、CP6 轨道宽度校正方法 12十二、FCP6、CP642保养作业手顺书 12十三、CP642、CP643 X轴BALL SCREW改造工程 22十四、CP643 X_Y TABLE UP/DOWN 新型CHECK SENSOR注意事项 25十五、CP643系列NEW YTPECONV.CULT.CHK.LEFT SENSOR AMP.调整方法 25十六、CP643 X轴电机更换步骤 26十七、CP-643 Parameter List参数设定 26十八、凸轮箱皮带更换方法34内容一、CP6控制及辅助系统CP6贴片机控制系统包括:1、CPU板执行贴片机控制所需计算,内存中存储有程序及设备固有数据2、操纵板用于控制、调整设备运行监视屏3、视觉处理板执行视觉处理功能,并进行坐标修正计算,与将处理分析结果与CPU通讯,将元器件图像输出给监视器4、伺服板控制各工作轴的伺服放大器5、I/O板实现贴片机与CPU板之间的信号输入/输出中继6、SCSI板该板插槽内插有一块存储卡,用于存储视觉处理程序7、MP板该板插槽内插有一块存储卡,用于存储贴片机控制程序8、程序器与I/O板联合工作,以特定的顺序处理输入/输出信号9、伺服放大器控制该轴伺服马达10、伺服马达驱动各伺服轴(X. Y. Z. D1. D2. FQ. FRQ. NC. C)请教上位楼主(校友)及各位大虾,对于工作轴X. Y. Z. D1. D2. FQ. FRQ. NC. C,本人除了了解X. Y. Z.外其它不清楚,请问其余分别指的是什么?D1.D2 代表2个table axis二、关于CP643E问题问题:CP643E开机之后VISION BOOTING正常,就是在VISION启动之后不显示回‘ZERO SETING’的命令并且显示:SERVO ALARM,查所SERVO PACK均正常显示bb,更换CPU卡等无效,请各位帮忙!建议:你检查一下SERVO PACK 的接线是不是有问题,主要是OUTPUT终于找到了!昨天又找了一遍连线换了很多卡和扳子,最后一弟兄想起前几天做过PM有吸尘器给BOX除过尘,终于找到了一个SERVO PACK下面的开关被碰掉了三、CP6没法回原点问题:CP6机有这样一个问题,每次关电源后开机很麻烦,没法回原点.现象是这样的,开机按启动回原点,各轴都跑向原点移动,惟有C轴,晃了一晃就停下来了,屏幕显示一直就这样等待着,什么警都不报,10几分种还是这样.本人怀疑是12站的SENSOR有问题,光纤插拔一下,关电再开机,重复几次又可以了.但每次关电又是这样.这到底是怎么回事.解答:我前些时候也碰到这问题,请打开前面的盖子(FRONT DOOR),在右上方有一个缺口,里面有一个ㄇ字型SENSOR,感应着一个轮盘,若是轮盘转一圈SENSOR都不会亮,把它换新(也许是接触不良)那个是CAM-axis回零点sensorI/O MapX03E 0 CAM ZERO POS.当铁板遮住sensor时红灯要熄灭才是正常用BYPASS KEY将安全门打开,回零仔细观察机器内部哪个轴到零点SENSOR 后还不能停下来,检查此处SENSOR和AMP,必要时调整AMP可能是10ST OR 12ST 回不到原点所致,这时打开前安全门,可以看到PQ或PRQ马达在一直转,调整一下这两个轴的原点Sensor AMP即可疑问:第12站φ Sensor AMP怎么调?是不是数字显示的那种??四、CP642 机器故障问题:C P642 机器故障报警:servo amp alarm检查:1.X axis 伺服的保险丝已经烧了. 更换保险丝,故障依旧.2.发现伺服已坏,有明显的烧焦味道;3.换伺服.疑问:请问,这一解决问题的过程中,还有那些要注意的事项和细节???建议:Servo AMP 的参数有必要检查一下, 我指的参数是CPU BOX 中的那张纸上对SERVO AMP 的参数, 用DIGITAL OPERATOR 来检查.更换电容,在伺服放大器的电源附近。
欧姆龙E5AZ、E5EZ温控表手册、说明书及应用

III
安全使用要求
请确保遵守以下注意事项以保证安全使用。 (1) (2) (3) 为了正确接线,请确认端子极性。不使用的端子,请勿连接。 为避免感应噪音, 温控器接线应远离高压线或大电流的电源电缆并避免与电力线平行或作同一配线。 推荐使用独立 的管道、导管或带护套的屏蔽。 请勿在下列环境中使用 有粉尘或腐蚀性气体(尤其是硫化气体、氨气等)存在的地方。 会产生结冰、凝露的地方。 阳光直射的地方 受到振动或冲击剧烈的地方 水、油等飞溅的地方 受加热器直接辐射的地方 温度变化剧烈的地方 (4) (5) 为便于散热,温控器周边请勿封闭。 (确保留有足够的空间散热。 ) 请勿堵塞温控器外壳上的通风孔。 在各型号规定的温度和温度范围内使用和储藏温控器, 当二个或多个温控器水平紧靠安装或垂直紧安装时, 由于温 控器的热辐射会导致内部温度上升而降低使用寿命。 这种情况下, 需要采取风扇强制冷却或其它通风措施来降低温 控器的温度,但是,小心不要单冷却接线端部分以避免造成测量误差。 (6) (7) (8) (9) (10) (11) (12) (13) (14) 当从盒体内取出或向盒体放置内部装置或连线装置时,请勿触碰到内部电气元件,或撞击内部装置。 清洗时,请勿使用油漆稀释剂或类似产品。请使用标准等级的酒精。 使用规定尺寸 (M3.5, 宽不大于 7.2mm) 的波纹端子接线。 连接线采用 AWG24~AWG14 规格线材, 剥线长度 5~6mm。 尽量将 E5AZ/E5EZ 温度控制器和产生强高频 (如高频焊接、高频缝纫机)噪声或电涌的装置分开配置。 执行自调节时,在导通主体单元的同时或之前导通负载(如加热器) 。如果在导通负载前将主体单元导通,将可能 无法获得正确的自调节结果和实现最佳控制。 使用符合 E5AZ/E5EZ 电源规格的电源,即 100-240VAC(50/60Hz)。同时确保电源接通后 2 秒内电压达到额定值。 在会产生噪音的外围设备(特别是马达、变压器、螺线管、磁线圈或其它带有电感元件的设备)上安装电涌抑制器 或噪声滤波器。 给电源安装滤波器时,确保滤波器有足够的电压和电流容量,尽量将滤波器安装在离 E5AZ/E5EZ 温度控制器最近 的地方。 请在以下温度和湿度范围内使用温控器: 温度:-10℃~55℃(无结冰或凝露现象) ,相对湿度:25%~85%(RH) 。 如把 E5AZ/E5EZ 安装在控制面板内,确保温控器周围(不是控制面板周围)的温度不超过 55℃。 如果 E5AZ/E5EZ 温度控制器受到热辐射,应使用风扇将 E5AZ/E5EZ 温度控制器的表面温度降至 55℃以下。 (15) (16) (17) (18) (19) (20) (21) 请在以下温度和湿度范围内存放温控器: 温度:-25℃~65℃(无结冰或凝露现象) ,相对湿度:25%~85%(RH) 。 请勿将重物放在 E5AZ/E5EZ 温度控制器上,或对其施加压力,以防止产品使用或保存中变形或毁坏。 请勿在靠近收音机、电视机或无线装置的位置使用 E5AZ/E5EZ 温度控制器,这些装置可能会对本产品造成干扰, 影响其性能。 对 E5AZ/E5EZ 预热 30 分钟以上。 电源启动后经约 4 秒钟输出才开启,在配置控制回路时请给予充分的考虑。 在向初始菜单切换后,控制输出关闭。请在组态时给予考虑。 安装一个开关或断路器,并明显标记出其位置,以便操作者能迅速关闭 E5AZ/E5EZ 温度控制器。
报警贴士

CP6报警注释与处理方法
机台报警 Tape feeder Return CAM to zero Stop by noodle skip PCB Transport in(main/out) Servo Alarm X(Y/D1/D2) AXIS overtravel Servo amp alarm Coolant oil circulat Safety door(1/2) rear Front safety door rear 注释 飞达翘高报警 CAM轴报警 自动跳吸嘴报警 PCB传送报警 各轴超界限报警 伺服箱报警 联系相关人员 热能报警 安全门报警 检查安全门插梢是否到位 前安全门报警 Front safetydoor & X/Y Tabble PCB IN 机台 PCB MAIN PCB OUT 处理方法 检查飞达是否装好、料带是否断裂 将CAM轴摇到0° 检查飞达是否装好、吸嘴是否堵塞 检查轨道是否卡板 按下紧急开关,将该轴归到正常位置 Tabble D2 Safetydoor 2 Tape feeder Safetydoor Tabble D1 Saf机台报警 Tape feeder Return CAM to zero Stop by noodle skip PCB Transport in(main/out) Servo Alarm X(Y/D1/D2) AXIS overtravel Servo amp alarm 注释 飞达翘高报警 CAM轴报警 自动跳吸嘴报警 PCB传送报警 各轴超界限报警 伺服箱报警 联系相关人员 处理方法 检查飞达是否装好、料带是否断裂 将CAM轴摇到0° 检查飞达是否装好、吸嘴是否堵塞 检查轨道是否卡板 按下紧急开关,将该轴归到正常位置 Tabble D2 Safetydoor 2 Tape feeder Safetydoor Tabble D1 Safetydoor1 报警小贴示
高频电源故障处理手册
NANJING GUODIAN ENVIROMENTAL PROTECTION EQUIPMENT CO.,LTD
HF-01 系列电除尘器高频电源
故障处理手册
安全指南
调试、运行及维护高频电源前,请仔细阅读本说明书。不遵守说明书涉及规则可能导致损坏元 器件、触电、人身伤害甚至死亡。
HF-01 系列高频高压整流电源故障处理手册
目录
技术准备 .................................................................................................................................... 1 一 变压器油温超限 .................................................................................................................. 2
i
HF-01 系列高频高压整流电源故障处理手册
8.3 处理步骤 .................................................................................................................... 14 九 二次短路 ............................................................................................................................ 15
9.1 报警类型 .................................................................................................................... 15 9.2 故障描述 .................................................................................................................... 15 9.3 处理步骤 .................................................................................................................... 15 十 二次开路 ............................................................................................................................ 16 10.1 报警类型 .................................................................................................................. 16 10.2 故障说明 .................................................................................................................. 16 10.3 处理步骤 .................................................................................................................. 16 十一 U2 均值超限 ................................................................................................................... 17 11.1 报警类型 .................................................................................................................. 17 11.2 故障说明 .................................................................................................................. 17 11.3 处理步骤 .................................................................................................................. 17 十二 I2 均值超限..................................................................................................................... 18 12.1 报警类型 .................................................................................................................. 18 12.2 故障说明 .................................................................................................................. 18 12.3 处理步骤 .................................................................................................................. 18 十三 风机故障 ........................................................................................................................ 19 13.1 故障说明 .................................................................................................................. 19 13.2 处理步骤 .................................................................................................................. 19 十四 高压联锁故障 ................................................................................................................ 21 14.1 故障描述 .................................................................................................................. 21 14.2 故障说明 .................................................................................................................. 21 14.3 处理步骤 .................................................................................................................. 21 十五 通讯故障 ........................................................................................................................ 22 15.1 单台高频电源故障 .................................................................................................. 22 15.2 某侧电场高频电源通讯故障 .................................................................................. 22
ESA200L系列微机保护说明书(V2.01)

ESA211L 数字式线路保护测控装置..................................................................................................................... 10 一 、功能配置.......................................................................................................................................................10 二 保护原理说明...................................................................................................................................................10 2.1 三段式相间过流保护.................................................................................................................................10 2.2 三段式零序过电流保护.............................................................................................................................10 2.3 反时限元件.................................................................................................................................................10 2.4 过负荷元件.................................................................................................................................................11 2.5 三相一次重合闸.........................................................................................................................................11 2.6 相间合闸加速保护.....................................................................................................................................11 2.7 低压解列.....................................................................................................................................................11 2.8 PT 断线检测................................................................................................................................................12 2.9 数据记录.....................................................................................................................................................12 2.10 遥信、遥测、遥控功能...........................................................................................................................12 三、整定及压板.....................................................................................................................................................12 3.1 整定值清单及说明.....................................................................................................................................12 3.2 软压板清单及说明.....................................................................................................................................13 四、保护原理接线图.............................................................................................................................................15 ESA221L 数字式变压器保护测控装置................................................................................................................. 15 一、功能配置.........................................................................................................................................................15 二、保护原理说明.................................................................................................................................................15 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 三段式相间过流保护.................................................................................................................................15 三段式零序过电流保护.............................................................................................................................15 反时限元件.................................................................................................................................................15 过负荷元件.................................................................................................................................................16 低压解列.....................................................................................................................................................16 PT 断线检测................................................................................................................................................16 非电量保护.................................................................................................................................................16 数据记录.....................................................................................................................................................16
第四章 FANUC工业机器人装调与维护

4.2机械手使用及维护
图中出了机器人安装布局 (推荐)。在安装中主要采取了以下两种措施来保证使用过
程中的安全。
(1) 使用警示灯或是其它的设施,让人员可以得知ROBOT 在运转中
(2) 在系统的周围设置安全栅栏,人员进入ROBOT工作区,必须由安全栅门进入,且安
全 栅门被打开时系统为停止状态,并将控制箱设置于栅门外侧;
4.3电控系统操作及维护
4.3.1电控系统
FANUC机器人控制器的外观和构成 部件,因受控的机器人、各类选件的 指定、应用而存在一定的差异,但其 主要由控制器、操作箱和示教器等部 件组成。不失一般性,本章以如图4-8
所示的R-J3iB控制器为核心的电控系
统为主进行介绍。
操作箱 示教器
控制器
图4-8 以R-J3iB控制器为核心的电控系统示意图
伺服放大伺器服放大器 (6 轴放大(6器轴)放大器)
210VAC 210VAC 变压器过热变信压号器过热信号
210VAC 210VAC EMG 信号EMG 信号
脉冲编码器脉信冲号编/码机器器信人号ト/D机I/器 DO人信 ト号DI/DO 信号 モ电机功率モ/电制机动功器率功/率制动器功率
AC 输入AC 输入 200-23200V0A-2C30 VAC 380-40308V0A-4C00 VAC 3 3
1.搬运 如图4-6所示,每次运输前可
采用吊装运输方式。运输时应注 意:搬运ROBOT 过程前,请先确 认绑紧所有的设备不会晃动;小 心的确认搬运的货车,及搬运设 备是否堪用。
4.2机械手使用及维护
2.安装 ROBOT和其它的机器,最大的不同在于它拥有手臂和关节,
可以做出高自由度的动作,伸展到任一的角度和空间之中。但 是相对的也让ROBTO变的较其他的自动化设备更加的危险。因此 安全性的措施,必须要考虑在整个自动化系统设备上。
变频器故障报警
安川变频器故障代码异常表示故障内容说明处理对策等级UV1;主回路低电压(PUV)运转中主回路电压低于“低电压检出标准”15ms,(瞬停保护1)检查电源电压及配线ADc;Bus undervolt护2S)低电压检出标准200V级;约190V以下400V级:约380V以下UV2;控制回路低电压(CUV)控制回路电压低于低电压检出标准2)检查电源容量UV3;内部电磁接触器故障运转时预充电接触器开路AUV;瞬时停电检出中1)主回路直流电低于低电压检出标准2)预充电接触器Under Volatage3)控制回路电压低于低电压检出标准BOC;过电流(OC)变频器输出电流超过OC标准1)检查电机的阻抗绝缘是否正常2)延长加减速时间AGF;接地故障(GF)变频器输出侧接地电流超过变频器额定电流的50%以上1)检查电机是否绝缘劣化2)变频器及电机间配线是否有破损AOV;过电压(OV)主回路直流电压高于过电压检出标准200V级:约400V 400V级:约延长减速时间,加装制动控制器及制动电阻ASC;负载短路(SC)变频器输出侧短路检查电机的绝缘及阻抗是否正常A PUF;保险丝断(FI)1)主回路晶体模块故障2)直流回路保险丝熔断1)检查晶体模块是否正常ADC;Bus Fuse open2)检查负载侧是否有短路,接地等情形OH;散热座过热(OH1)晶体模块冷却风扇的温度超过允许值检查风扇功能是否正常,及周围是否在额定温度内AOL1;电机过负载(OL1)输出电流超过电机过载容量减小负载AOL2;变频器过负载(OL2)输出电流超过变频器的额定电流值150%1分钟减少负载及延长加速时间APF输入欠项1)变频器输入电源欠相2)输入电压三相不平衡1)检查电源电压是否正常A2)检查输入端点螺丝是否销紧LF;输出欠项变频器输出侧电源欠相1)检查输出端点螺丝及配线是否正常A 2)电机三相阻抗检查RR;制动晶体管异常制动晶体管动作不良变频器送修ARH制动控制器过热制动控制器的温度高于允许值检查制动时间与制动电阻使用率AOS;过速度(OS)电机速度超过速度标准(F1-08)APGO;PG断线(PGO)PG断线(PGO)1)检查PG连线2)检查电机轴心是否堵住ADEV速度偏差过大(DEV)速度指令与速度回馈之值相差超过速度偏差(F1-10)检查是否过载BEF;运转指令不良正向运转及反向运转指令同时存在0.5秒以上控制时序检B查,正反转指令不能同时存在.EF3-EF8端子3外部异常信号输入外部端子3-8异常信号输入1)由U1-10确认异常信号输入端子External Fault3-8EF4-EF8-端子4-82)依端子设定之异常情况进行检修AOPE;01变频器容量设置异常变频器容量参数902-04)设定不良调整设定值COPE02;Limit参数设置不当参数设定有超出限定值调整设定值COPE03;Terminal多功能输入设定不当H1-(01-06)的设定值未依小而大顺序设定或重复设定相同值调整设定值COPE;10v/f参数设置不当E1-(04-10)必须符合下列条件:Fmax大等于(E1-04)FA大于(E1-06)调整设定值v/f Ptrn Setting FB大等于(E1-07)Fmin(E1-09)COPE11;参数设定不当参数设定值1)C6-01大于5KHz但C6-02小等于5KHz调整设定值Carr frq/on-Delay2)C6-03大于6但C6-02小等于C6-01CERR EEPROM输入不良参数初始化时正确信息无法写入EEPROM控制板更换BCALL SI-B传输错误电源投入时控制信号不正常传输机器控制信号从新检查CED;传输故障控制信号送出后2秒内未收到正常响应信号传输机器控制信号从新检查ACPF00控制回路传输异常1电源投入后,5秒内操作器与控制板连接异常发生从新安装数字操作器检查控制回路的配线ACOM-ERR(OP&INV)CPF01控制回路传输异常2MPU周边零件故障更换控制板COM-ERR(OP&INV)CPF02基极阻断(BB)回路不良变频器控制板故障更换控制板ABB circuit ErrCPF03EEPROM输入不良EEPROM ErrorCPF04CUP内部A/D转换器不良Internal A/D ErrGPF05CUP内部A/D转换器不良External A/D ErrCPF06周边界面卡连接不良周边界面卡安装不正确周边界面卡从新更换A Option ErrorCPF20模块指令卡的A/D变换器不良AI-14B卡的A/D变换器动作不良更换AI-14B卡AOption A/D Error故障等级的内容定义A:重故障,电机自然停车,故障的异常表示显示于数字操作器上,异常接点输出(18)(20)接通B:轻故障,电机继续运转,故障的异常表示显示于数字操作器上。
CP6中文IO知识
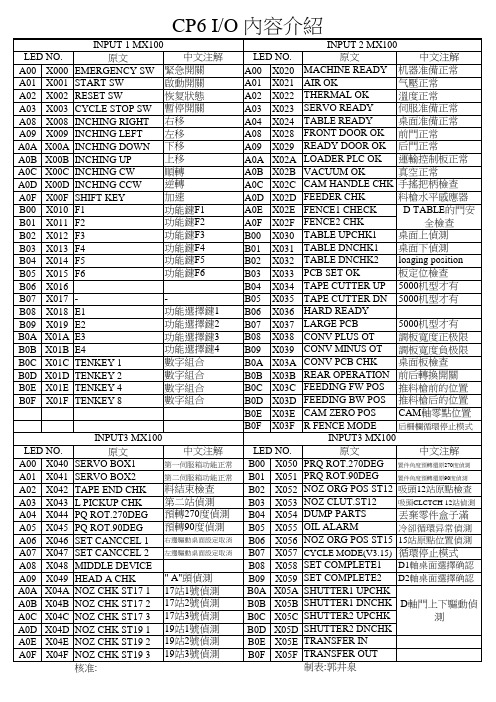
LED NO. A00 X040 A01 X041 A02 X042 A03 X043 A04 X044 A05 X045 A06 X046 A07 X047 A08 X048 A09 X049 A0A X04A A0B X04B A0C X04C A0D X04D A0E X04E A0F X04F
cp6io內容介紹lednoa00x000a01x001a02x002a03x003a08x008a09x009a0ax00aa0bx00ba0cx00ca0dx00da0fx00fb00x010b01x011b02x012b03x013b04x014b05x015b06x016b07x017b08x018b09x019b0ax01ab0bx01bb0cx01cb0dx01db0ex01eb0fx01finput1mx100原文中文注解emergencysw緊急開關startsw啟動開關resetsw恢复?態cyclestopsw暫停開關inchingright右移inchingleft左移inchingdown下移inchingup上移inchingcw順轉inchingccw逆轉shiftkey加速功能鍵f1f1功能鍵f2f2功能鍵f3f3功能鍵f4f4功能鍵f5f5功能鍵f6f6e1e2e3e4tenkey1tenkey2tenkey4tenkey8功能選擇鍵1功能選擇鍵2功能選擇鍵3功能選擇鍵4數字組合數字組合數字組合數字組合lednoa00x020a01x021a02x022a03x023a04x024a08x028a09x029a0ax02aa0bx02ba0cx02ca0dx02da0ex02ea0fx02fb00x030b01x031b02x032b03x033b04x034b05x035b06x036b07x037b08x038b09x039b0ax03ab0bx03bb0cx03cb0dx03db0ex03eb0fx03flednob00x050b01x051b02x052b03x053b04x054b05x055b06x056b07x057b08x058b09x059b0ax05ab0bx05bb0cx05cb0dx05db0ex05eb0fx05finput2mx100原文中文注解machineready机器准備正常airok气壓正常thermalok溫度正常servoready伺服准備正常tableready桌面准備正常frontdoorok前門正常readydoorok后門正常loaderplcok運輸控制板正常vacuumok真空正常camhandlechk手搖把柄檢查feederchk?槍水平感應器fence1checkdtable的門安fence2chk全檢查tableupchk
FANUC系统报警信息诠释

(措施1):替换与报警信息对应得伺服放大器。
14)ﻩSRVO–023 SVAL1 Stop error excess (Group : iAxis : j)解释:停止时得伺服装置位置偏差值异常大。
HSSB断开连接)警报也同时发生,或就是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)与面板(JRS15)通讯异常。主板与面板电路板之 间得电缆连接可能松动。或者,电缆,面板电路板或就是主板可能有故障。
注意:
如果LED指示灯就是关闭不发光得,下面得警报也会产生。SRVO–001 Operator panel E–stop、
4)ﻩSRVO–004 SVAL1 Fence open解释:在自动运转方式下,打开了连接于面板电路板上得安全栅接点。
双链规格:端子台TBOP4 EAS1与EAS11之间、EAS2与EAS21之间。 单链规格:端子台TBOP1 FENCE1与FENCE2之间。
(措施1):连接有安全栅栏时,关上安全栅栏。(措施2):对面板电路板上得端子台间(双链规格:TBOP4得EAS1与EAS11之间、
2、连接器就是否安全得连接。
核实伺服放大器得连接器CRF8与CRM68就是否切实连接,同时核实RP1电 缆处于良好状态,没有断路或就是显眼得扭曲。
进一步检查机器人连接电缆(RP1)、机械内部电缆,并确认就是否有断线与接地故障。
如果没有行程开关使用,一个短接器一定就是连接在机械单元上,检查短接
器。
注释:出厂时,为了便于包装,在超程状态下出厂。不使用超行程信号时,有时也在机械端将其短路。
Alarm

AlarmCNC报警报警号报警信息1.PS报警2.SW报警sw0100参数写入处于打开3.sv报警sv0006双电机驱动轴不正确sv0301APC报警:通讯错误sv0302APC报警:超时错误sv0304APC报警:奇偶性错误sv0305APC报警:脉冲错误sv0306APC报警:溢出报警sv0307APC报警:轴移动超差sv0401伺服v-就绪信号关闭sv0404伺服v-就绪信号关闭sv0409检测的转矩异常sv0410停止时误差太大sv0411运动时误差太大sv0413轴LSI溢出sv0415移动量过大sv0417伺服非法DGTL参数sv0420同步转矩差太大sv0422转矩控制超速sv0423转矩控制误差太大sv0430伺服电机过热sv0434逆变器控制电压低sv0435逆变器DC LINK 低电压sv0436软过热继电器sv0438逆变器电流异常sv0444逆变器冷却风扇故障sv0445软断线报警sv446硬断线报警sv447硬断线(外置)sv448反馈不一致报警sv449逆变器IPM报警sv453串行脉冲编码器软断线报警sv460fssb断线sv462cnc数据传送错误sv600逆变器DC LINK 过流sv601逆变器散热风扇故障sv602逆变器过热sv603逆变器IPM报警(过热)sv604放大器通讯错误4.OT报警OT0500正向超程,软限位1 OT0501负向超程,软限位1 OT0504正向超程,软限位3 OT0505负向超程,软限位3 OT0506正向超程,硬限位OT0507负向超程,硬限位OT0510正向超程(预检查)OT0511负向超程(预检查)5.IO报警IO1001文件存储错误IO1002文件系统错误IO1032存储器存取超限6.PW报警PW000必须关断电源PW001未定义X地址PW006需关闭电源(防止误动作)7.sp报警8.OH报警OH0700控制器过热OH0701风扇电机停止转动9.DS报警DS0300A PC报警:需会参考点DS0405未回到参考点上DS1450回零未结束PMC报警ER17PROGRAM PARITYER32NO IO DEVICEER33IO LINK ERRORER37TOO MUCH SLOT IN BASEER43PROGRAM DATA ERRORER97IO LINK FAILUREWN11INCOMPATIBLE FUNCTIONPC004CPU ERRORPC006 CPU ERRORPC009CPU ERRORPC0010CPU ERRORPC0012CPU ERRORPC030RAM PARIPC050IO LINK ER1 CHz:Gryy:xx PC051IO LINK ER2 CHz xx:yy:ww:vv PC60 FBUSPC61FL-RPC097LADDER PARITY ERRPC098CODE PARITY ERRPC501NC/PMC INTERFACE ERR PATH-内容在串联控制从属轴中进行绝对位置检测的设定1815#5=1绝对位置检测器通讯错误,机械位置未能正确找到。
发变组保护系统PT断线报警及CT断线报警条件及处理

电压电流相位; 4、查看机组故障录波装置中性点1、2分支采样; 判断是否满足TA断线条件
CT断线报警处理流程
CT断线报警条件及处理
差流报警只要控制字投入即可,TA断线报警或 闭锁需要控制字及压板均投入才能投入; 在实际处理时,应根据判据条件进行判断,在 主变充电时,往往会导致主变TA断线报警,TA 报警灯会一直点亮,应按复归按钮才能复归信 号,与差流报警不一样,差流如果消失,则延 时10s自动复归。
CT断线报警处理流程
查看中控室报警报文,确认报警的信息
CT断线报警处理流程
查看#2发电机保护A套报文,面板报警信息
CT断线报警处理流程
查看#2发电机保护A套装置差流采样异常
#2
A
CT断线报警处理流程
发 电 机 保 护 套 装 置 中 性 点 分 支 电 流 相 位 异 常
2
CT断线报警处理流程
查看机组故障录波中性点1 2分支采样
CT断线报警条件及处理
差动保护差流报警: 只有在相关差动保护控制字投入时(与压板投 入无关),差流报警功能投入,满足判据,延 时10s报相应差动保护差动报警,不闭锁差动保 护,差流消失,延时10s返回。
TA断线报警瞬时判据和长期判据的区别,瞬时 判据为差动保护启动后40ms后,进行判断,长 期判据只要满足差流定值则延时10s报警,恢复 后10s返回
CT断线报警处理流程
CT回路直阻及绝缘进行检查 测量保护装置侧直阻 对保护装置进行采样检查 模拟事故现场工况,排除保护装置误动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四五位(01-FF):图像处理的法则
第六七八位(000-FFF):每种法则的代码
3、 一些软件错误的报警
以下代码为VISION软件出错的报警代码,如有出现其中之一,必须关机处理,且关机后重新启动一般都能解除报警:
A00FFF A00F01 A00F02 A00F03 A00F05 A00101 A00201 A00202 A00301 A00302 A00401
CP6报警默认分类 2009-09-10 11:03:58 阅读141 评论0 字号:大中小 订阅 .
FUJI VISION错误代码
一、FUJI VISION错误代码(SMD3 V2。92)
1、 错误种类
a>、 1CA****:组件检测错误
b>、 1CB01***:校正错误(CALIBRATION)
c>、 1CB02***:NOZZLE中心测试报警
d>、 1CB03***:检查基准MARK时的报警
e>、 1CC*****:执行第一PIN检查时的报警(IP3E)
2、 每个字符表示的含义
一般为八个字符,其各自代表的含义如下(1CA*****):
1C :表示图像处理错误
第三位(A,B,C):处理的类别
4、 举例说明
a> 1CB01001表示没有荧光纸,1CB01002表示荧光纸太脏,1CB01005表示JIG的角度变形超过5度
b> 1CB02202表示NOZZLE的尺寸设定错误,1CB02201表示NOZZLE类型设定错误
c> 1CB03001表示MARK的尺寸太小(不能小于0。5㎜)
1CB03002表示MARK的尺寸太大(最大为3。5㎜) 1CB03பைடு நூலகம்13表示MARK的形状太扭曲
d> 1CC01001表示CUT CHECK超出扫描区域,CUT的坐标输入有误 1CC03022表示来料方向不对
e> 1CA00001表示组件没有吸起 1CA00002当前的组件与PART DATA里描述的尺寸差异太大 1CA00003LEAD PITCH太宽或太窄 1CA00F04PART DATA里指定了一个不存在的VISION TYPE 1CA00004组件脚弯曲,弯曲量超出PITCH LIMIT的允许误差
A00402 A00403 A00404 A00405 A00501 A00502 A00601 A00602 A00603 A00604 A00605
A00701 A00702 A00703 A00704 A00705 A00801 A00802 A00803 A00804 A00805