基于NoC的SoC中实时跟踪数据的传输
“自由探索自主创新”类项目汇总 - 西安交通大学科技处

序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 项目名称 肝细胞移植联合粒细胞集落刺激因子对犬急性肝衰竭的疗 效研究 纳米微泡定向爆破主动靶向给药治疗高白细胞性中枢神经 系统白血病的实验研究 傅立叶变换红外光谱用于恶性肿瘤诊断的细胞基础研究 急慢性心理应激对肠神经可塑性的影响及机制探讨 c11orf48在膀胱癌侵袭中的作用和机制研究 肺动脉高压中GPCR调节氧敏感性Kv通道机制的研究 脂肪细胞KATP通道在脂联素分泌调节中的作用 长链非编码RNA-MALAT-1对肝癌细胞凋亡调节机制及治疗 作用的研究 阿奇霉素通过调节MMP/TIMP预防和治疗肺气肿 卵巢癌干细胞与耐药性初步研究 LKB1基因调控肺癌侵袭转移的作用研究 肽库活体筛选胃癌特异性多肽及其对胃癌早期诊断研究 3P-STAT3-siRNA 对肝癌联合基因治疗研究 肠神经系统-Cajal间质细胞-平滑肌运动元件在移植小肠 动力异常中的作用 Vasculostatin抑制胶质瘤血管生成的体内外机制研究 非典型USH2临床表型、基因突变及其发病机理研究 Notch途径调节LEF-1的表达机制研究 雄激素调节角膜上皮细胞Mucins表达在干眼治疗中的作用 Rho激酶抑制剂对脂多糖诱导的急性肾功能衰竭的保护作 用及其机制 IL-17诱导类风湿关节炎滑膜成纤维细胞表达RANKL的研究 大肠癌中ZNF278调控下游基因的筛选与鉴定 新生儿呼吸窘迫综合征治疗新靶点:药物分子伴侣的作用 机制研究 预填充CPC/BMP的股骨头支撑器对股骨头坏死塌陷变形预 防作用的实验研究 转染透明质酸合成酶2基因对人骨关节炎和大骨节病软骨 细胞透明质酸合成及基质代谢影响的研究 合并毛细血管襻纤维素样坏死的原发性IgA肾病的生物标 志物及分子发病机制研究 CTGF与乙肝核心抗原融合疫苗抗肝纤维化研究 人prohibitin基因短发夹shRNA真核表达载体的构建及对 乳腺癌细胞系的生物学作用 第 1 页,共 5 页 申报人 韩 冰 所在单位 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 一附院 二附院 二附院 二附院 二附院 二附院
基于SOC的实时操作系统分析

基于SOC的实时操作系统分析摘要:随着芯片集成技术的不断发展,目前,在集成电路设计方面已经进入了一个新的时代,在设计时通常采用软件硬件协同的方法。
实时操作系统能够显著优化芯片的性能特征,同时还能优化设计的总体效益,降低其上市的时间,提高其可用性能。
因此,本文对基于SOC 的实时操作系统进行了分析。
关键词:SOC 实时操作系统分析实时操作系统(RTOS)是嵌入式应用软件的基础和开发平台。
RTOS根据各个任务的性质和要求,进行资源(包括存储器、外设等)管理、任务的p普通的计算机系统当中,一般是通过软件来实现操作系统的设计的,对实时性也没有较高的要求,没有严格限制其所占用的内存。
但是基于SOC的实时操作系统在设计时对实时性有很严格的要求。
同时也苛刻限制了代码的长度。
但是与此同时,进行这种实时系统的设计时,也有很强的灵活性,它主要体现在:为了保障系统功能的实现,能够在芯片上设计额外的硬件,将实时操作系统的尺寸缩小,使其运行时间变快。
通常是利用新的算法和数据结构来不断提高操作系统的实时性能,而在基于SOC的操作系统当中,进行软硬件的协同设计,提供了一种创新的机制。
在基于集成芯片RTOS设计当中,本文主要是通过采用I/O管理来实现软硬件的有效划分。
纵线调度对于HDTV解码芯片设计具有重要作用,它具有较强的非随机性,在选择算法时可以选用时间片这种调度方法。
为了将整个操作系统在调度上的总开销控制在一定范围内,并提高操作系统中芯片吞吐的总量,采用硬件来实现对所有总线的管理。
2 基于SOC的实时操作系统的任务管理第一,任务的调度。
在实施操作系统当中,对内核进行调度时需要确立基本调度单位,任务作为基本单位,其驱动通常都是事件或者消息的基础上形成的,也就是说,在设计任务时,需要根据对接收到的各项事件以及信息的处理来进行的,它具有循环性。
任务的状态在实时操作系统中表现出很多不同种类,任务的运行,任务的就绪以及挂起等等,但是一般来说,系统中在同一时间内只可供一种任务状态存在,不同的任务按照其级别的差异来通过各自的时间片,然后获得访问CPU的权利。
《基于SOPC的目标跟踪系统设计》范文
《基于SOPC的目标跟踪系统设计》篇一一、引言随着科技的不断进步,目标跟踪系统在众多领域如安防监控、自动驾驶、军事侦察等得到了广泛应用。
传统的目标跟踪系统通常由硬件和软件组成,然而在复杂环境中,系统的处理能力和实时性面临巨大的挑战。
本文将探讨基于SOPC(System-on-a-Programmable-Chip,可编程芯片上的系统)的目标跟踪系统设计,以提高系统的性能和实时性。
二、SOPC技术概述SOPC是一种将处理器、存储器、外设等集成在单一可编程芯片上的技术。
通过SOPC技术,可以实现高度的系统集成和定制化,从而提高系统的性能和可靠性。
在目标跟踪系统中,SOPC 技术可以用于实现高性能的图像处理、数据传输和控制等功能。
三、目标跟踪系统设计(一)系统架构设计基于SOPC的目标跟踪系统设计主要包括硬件设计和软件设计两部分。
硬件设计包括处理器、存储器、摄像头等模块的选型和集成。
软件设计包括操作系统、图像处理算法、目标跟踪算法等的设计和实现。
(二)图像处理模块设计图像处理模块是目标跟踪系统的核心部分,其性能直接影响到系统的跟踪效果。
在SOPC平台上,可以通过硬件加速技术实现高性能的图像处理。
具体包括图像预处理、特征提取、背景建模等步骤。
(三)目标跟踪算法设计目标跟踪算法是用于确定目标位置的关键技术。
常见的目标跟踪算法包括光流法、均值漂移法、深度学习法等。
在SOPC平台上,可以根据具体应用场景和性能需求选择合适的算法,并对其进行优化和加速。
(四)控制与通信模块设计控制与通信模块负责整个系统的控制和数据传输。
在SOPC 平台上,可以通过可编程逻辑实现灵活的控制策略,并通过高速接口实现与其他设备的数据传输。
四、系统实现与优化(一)硬件实现在硬件实现方面,需要根据系统需求选择合适的处理器、存储器、摄像头等模块,并进行集成和调试。
同时,需要考虑功耗、散热等因素,以保证系统的稳定性和可靠性。
(二)软件实现与优化在软件实现方面,需要编写操作系统、图像处理算法、目标跟踪算法等程序,并进行优化和调试。
《基于SOPC的目标跟踪系统设计》范文
《基于SOPC的目标跟踪系统设计》篇一一、引言随着科技的不断进步,目标跟踪系统在众多领域中发挥着越来越重要的作用,如安防监控、自动驾驶、智能机器人等。
SOPC (System on a Programmable Chip,可编程芯片上的系统)作为一种集成了处理器、存储器、外设接口等功能的可编程系统,为设计高效、灵活的目标跟踪系统提供了良好的平台。
本文将详细介绍基于SOPC的目标跟踪系统设计,包括其设计思路、关键技术及实现方法。
二、系统设计思路基于SOPC的目标跟踪系统设计主要分为以下几个步骤:需求分析、硬件设计、软件设计及系统集成。
首先,需求分析是系统设计的第一步。
我们需要明确目标跟踪系统的应用场景、性能指标及功能需求。
例如,在安防监控领域,我们需要设计一个能够实时监测、追踪并识别异常目标的系统。
其次,硬件设计是系统设计的核心部分。
我们需要在SOPC 平台上选择合适的处理器、存储器、外设接口等硬件资源,并根据需求进行配置和优化。
此外,还需要考虑硬件的功耗、稳定性及可扩展性等因素。
然后,软件设计是系统设计的另一重要部分。
我们需要编写相应的算法程序,实现目标检测、特征提取、目标跟踪等功能。
同时,还需要考虑软件的实时性、鲁棒性及可维护性等因素。
最后,系统集成是将硬件和软件进行整合,形成一个完整的系统。
在系统集成过程中,我们需要对硬件和软件进行调试和优化,确保系统的性能和稳定性达到预期要求。
三、关键技术基于SOPC的目标跟踪系统设计涉及的关键技术主要包括目标检测、特征提取和目标跟踪。
目标检测是目标跟踪系统的第一步,其主要任务是在图像或视频中检测出目标的位置。
常用的目标检测方法包括基于模板匹配的方法、基于背景减除的方法等。
特征提取是目标跟踪的关键技术之一,其主要任务是提取出目标的特征信息,如颜色、形状、纹理等。
这些特征信息将被用于后续的目标跟踪和识别。
常用的特征提取方法包括基于灰度的方法、基于边缘的方法等。
《基于SOPC的目标跟踪系统设计》范文

《基于SOPC的目标跟踪系统设计》篇一一、引言随着科技的不断进步,目标跟踪系统在众多领域如安防监控、自动驾驶、军事侦察等得到了广泛应用。
SOPC(System on a Programmable Chip,可编程芯片上的系统)作为一种集成度高、可定制性强的硬件平台,为目标跟踪系统的设计提供了新的可能性。
本文将探讨基于SOPC的目标跟踪系统设计,包括其设计原理、实现方法以及应用前景。
二、SOPC在目标跟踪系统中的应用SOPC作为一种高度集成的硬件平台,具有高性能、低功耗、可定制等优点,因此在目标跟踪系统中得到了广泛应用。
SOPC 可以实现对图像数据的实时处理和快速响应,从而实现对目标的准确跟踪。
在目标跟踪系统中,SOPC可以承担数据采集、处理、传输等任务,同时还可以与其它系统进行无缝集成,提高整个系统的性能。
三、目标跟踪系统设计原理目标跟踪系统的设计主要包括硬件设计和软件算法设计两部分。
硬件设计主要是选择合适的SOPC平台,并进行电路设计、芯片选型等工作。
软件算法设计则是实现目标跟踪的核心,包括图像预处理、特征提取、目标检测和跟踪等步骤。
1. 图像预处理:对采集到的图像进行去噪、增强等处理,以提高后续处理的准确性。
2. 特征提取:通过算法提取出目标在图像中的特征,如颜色、形状、纹理等。
3. 目标检测:根据提取的特征,在图像中检测出目标的位置。
4. 目标跟踪:根据检测到的目标位置,通过算法实现目标的实时跟踪。
四、基于SOPC的目标跟踪系统实现方法基于SOPC的目标跟踪系统实现方法主要包括硬件设计和软件算法设计两部分。
在硬件设计方面,需要选择合适的SOPC平台,并进行电路设计、芯片选型等工作。
在软件算法设计方面,需要采用合适的图像处理算法和目标跟踪算法,以实现对目标的准确跟踪。
具体实现步骤如下:1. 确定系统需求和性能指标,选择合适的SOPC平台。
2. 设计电路原理图和PCB板图,完成硬件电路的搭建。
基于SOPC技术的实时视频跟踪系统
13.77 13.31 13.04
2005.02
2∞5.03
2005.04
15.07 13.76 13.27
2006.02 2006.03 2006.04
15.79 2007.02
14.86 20昕.03
14.57
2007.04
18.0l 17.鹏 16.24
2004.05 13.90 2005.05
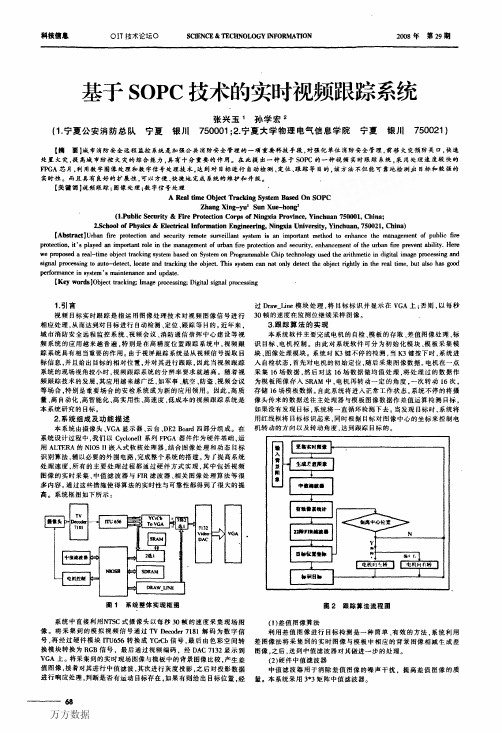
如果没有发现目标,系统将一直循环检测下去。当发现目标时,系统将
用红线框将目标标识起来.同时根据目标对图像中心的坐标来控制电
机转动的方向以及转动角度,达到跟踪目标的。
图1 系统整体实现框图
图2跟踪算法流程图
系统中直接利用N,rsC式摄像头以每秒30帧的速度采集现场图 像。将采集到的模拟视频信号通过Tv Decoder 7181解码为数字信 号,再经过硬件模块ITU656转换成YCrCb信号,最后由色彩空间转 换模块转换为RGB信号,最后通过视频编码,经DAC 7132显示到 VGA上。将采集到的实时现场图像与模板中的背景图像比较,产生差 值图像,接着对其进行中值滤波,其次进行灰度投影,之后对投影数据 进行响应处理,判断是否有运动目标存在。如果有则给出目标位置.经
17.48 16.60 16.58 16.64 16.59 17.80 16.76 19.49
作者简介:郜娜。女.1985年11月生,湖南湘潭人。2007年毕业于湖北黄冈 师范学院数学与应用敷学专业,获理学学士学位,现为浙江杭州电子科技大学 财经学院统计学2007级硕士研究生。研究方向为数据挖掘方法厦应用。
5.8071、5.4178、4.8155、4.0638、3.2389、2.4203、1.6799、1.0737、
0.6352、0.3731、0.2717。
网络摄像机SOC芯片简介演示

的应用。
03
3. 图像质量
图像质量是评估SOC芯片性能的关键指标之一。它涉及到芯片的图像
处理算法、色彩还原、噪点控制等方面。优秀的SOC芯片能够提供更清
晰、逼真和色彩鲜艳的图像输出。
与其他芯片的比较分析
与通用处理器比较
通用处理器在功能上更加灵活,但相比专用SOC芯片,它们在处理特定任务时 可能效率较低。SOC芯片针对网络摄像机的特定需求进行优化,能够提供更高 的处理性能和更低的功耗。
高效编码算法
SOC芯片集成了先进的视频编码算法,如H.264 、H.265等,使得高清视频传输更加流畅,同时 降低了带宽消耗。
多路视频输入与输出
高清网络摄像机中的SOC芯片通常支持多路视频 输入和输出,满足同时监控多个场景的需求。
智能家居摄像机
智能化功能集成
SOC芯片集成了智能家居相关的 功能模块,如人脸识别、语音识 别等,提升摄像机的智能化水平
强大的数据处理能力
工业级网络摄像机通常需要处理大量的视频数据,SOC芯片具备强 大的数据处理能力,确保实时、准确的数据传输和分析。
定制化功能支持
针对不同工业应用场景,SOC芯片提供定制化的功能支持,满足特定 行业的需求,如机器视觉、智能交通等。
04
CATALOGUE
SOC芯片性能评估与比较
性能评估指标
高动态范围(HDR)
通过合并不同曝光时间的图像,提升图像的动态范围,呈现更多 细节。
噪声抑制
采用先进的去噪算法,有效抑制图像中的噪声,提升图像质量。
图像增强
通过对比度增强、锐化等算法,提升图像的清晰度和观感。
视频编码技术
H.265编码
采用高效的H.265编码算 法,降低视频传输带宽和 存储空间需求。
一种NoC路由器间互连线的自适应驱动方法

一种NoC路由器间互连线的自适应驱动方法刘毅;杨银堂;梅伟锋;张旭【摘要】针对片上网络路由器间相邻长互连线串扰导致信号抖动大的问题,基于互连线有效负载解析模型,提出了一种通过相邻信号的比较得到有效负载大小,调整信号驱动强度,从而保持传播延迟时间稳定,抑制信号抖动的方法.与缓冲器驱动模式相比较,在驱动级具有相同宽长比的情况下,当互连线的长度为2mm、宽度和间距均为0.4μm时,信号的相对抖动减小了29.6%,有效提高了长互连线的最高工作频率.【期刊名称】《西安电子科技大学学报(自然科学版)》【年(卷),期】2010(037)001【总页数】5页(P28-32)【关键词】耦合;串扰;抖动;自适应驱动【作者】刘毅;杨银堂;梅伟锋;张旭【作者单位】西安电子科技大学微电子学院,陕西,西安,710071;西安电子科技大学宽禁带半导体材料与器件教育部重点实验室,陕西,西安,710071;西安电子科技大学微电子学院,陕西,西安,710071;西安电子科技大学宽禁带半导体材料与器件教育部重点实验室,陕西,西安,710071;西安电子科技大学微电子学院,陕西,西安,710071;西安电子科技大学微电子学院,陕西,西安,710071【正文语种】中文【中图分类】TN42基于片上网络(NoC)新型架构的SoC设计成为近年来集成电路设计领域的研究热点.这种结构不仅提高了IP间信息传输的数据带宽,同时使数据线的功耗得到有效控制.NoC中,数据线位宽压缩导致更高的工作频率要求,而NoC路由器之间长互连线的有效驱动仍然是制约系统性能的关键问题[1].长互连线不仅导致信号传播延迟时间增加,同时,由于线间耦合进一步加剧,串扰引起的信号抖动成为更加难于克服的设计困难.针对信号抖动问题,工业界普遍采用的方式是插入缓冲器并屏蔽总线[2],这种方法带来系统功耗和面积的增加.采用低摆幅电路不仅可以提高系统工作频率,同时可以降低动态功耗,被认为是较为理想的驱动方式[3],但这种方法的设计较为复杂,同时布线通道所需面积也会成倍增长.总线编码方法也被用于解决串扰问题,由于增加的冗余线较多,这种方法同样会带来面积的增加[4].由于信号串扰导致的信号抖动与相邻信号的相对变化密切相关,故笔者基于互连线的三线模型分析了各种串扰情况,归结为五级串扰程度,通过输入信号编码控制单元确定驱动强度,控制三态逻辑方式的五组PMOS和NMOS驱动管,有效减小了抖动与最大传播延迟比,从而缩短了信号锁存所需的时钟周期,提高了系统的工作频率.1 NoC体系分析NoC结构由路由器、网络接口(NI)、处理单元(PE)及链接组成.对于PE数量超过36的NoC芯片,网状(MESH)结构被证明具有互连功耗低、可扩展性强、易于获得更高数据带宽的特点[5].基于MESH结构的NoC中,PE通过NI与NoC相连,NI与临近路由器相连.PE间的数据传送路径包括PE到NI和NI到路由器、路由器之间、路由器到NI以及NI 到PE.整个传输路径被不同的时钟域所分隔,不同时钟域对应的路由器之间通过GALS结构完成数据传输.一般情况下,路由器之间的长互连线的数量被控制在4~8个范围内.为了保证足够的数据带宽,需要将GALS的时钟频率提高到500MHz~2GHz[6].对于长度达到2~10mm(路由器之间的互连线长度)的长互连,时钟频率的提高带来难于折中的设计困难.以传统的分级驱动方式为例,通过增加缓冲器的驱动强度可以增大工作频率的允许范围,但会增加互连驱动结构的功耗,对于采用级间比例相同的三级驱动互连结构,缓冲器的动态功耗占长互连驱动结构总功耗的30%.通过增强驱动的方法难于获得理想的长互连线驱动效果,故笔者提出改变驱动强度以改善信号传输性能的方法.2 容性串扰及信号抖动分析随着特征尺寸的减小,互连线宽度及间距相应减小,单位长度的线间耦合电容则相应增大.耦合电容会在数字信号间产生动态串扰,导致额外的延迟[7].互连线越长,耦合电容越大,串扰也就越强.为分析串扰对信号延迟的影响,首先通过图1说明互连线的寄生电容情况.图1中,Ct,Cb分别是互连线与上、下导电层间的寄生电容,Cte,Cbe分别为互连线与上、下导电层间的边缘电容,CC为相邻互连线间的耦合电容(包括平板电容和边缘电容,简称线间耦合电容).得到总的互连线对地电容为串扰引起的信号延迟由以下几个因素决定:耦合电容、驱动强度、干扰线的信号跳变方向、干扰线及受扰线的信号跳变时间.假定互连线n-1,n,n+1上的信号具有相同的驱动强度和跳变时间,并且信号同步跳变,此时互连线n的有效容性负载CB,eff 分为以下5种情况[8]:图1 互连线寄生电容情况1 互连线n-1,n+1上信号的跳变方向和n都相同时,有效负载电容为CB,eff=CB;情况2 互连线n-1和n+1上的信号一个保持不变,另一个跳变方向和n相同,有效负载电容为CB,eff=CB+CC.情况3 互连线 n-1和n+1上的信号同时保持不变,或者跳变方向相反,有效负载电容为CB,eff=CB+2CC.情况4 互连线n-1和n+1上的信号一个保持不变,另一个跳变方向和n相反,有效负载电容为CB,eff=CB+3CC.情况5 互连线n-1,n+1线上的信号跳变方向和n都相反,有效负载电容为CB,eff=CB+4CC.值得注意的是,互连线n-1和n+1上的电平变化不同,受耦合电容影响n上的信号延迟也不同.定义抖动与最大传播延迟比(JR,即相对抖动)为最大信号延迟与最小信号延迟之差和最大信号延迟的比值,即下面分析缓冲器驱动模式下互连线上信号的JR.长互连线的驱动级通常由级联的CMOS反相器构成,等效为一个信号源和输出电阻Ro;负载级等效为一个对地电容CL.为简化分析,长互连线用集总的RC表示,等效电路如图2所示.根据Elmore延时模型,有定义ρ为互连线n上CC与CB之比,结合公式(3)得到ρ越大,JR也就越大.根据文献[9]中ρ值计算方法和SMIC 0.13 μ m互连SPICE模型参数,取互连线宽度和间距为0.2μ m,得到ρ值近似为1.3,在不考虑MOS管寄生电容的情况下,计算得到JR高达82%.图2 缓冲器驱动模式等效电路3 自适应驱动方法及实现3.1 自适应驱动方法上节的分析表明,互连线的有效容性负载CB,eff值与相邻互连线信号变化密切相关.对于驱动强度不变的缓冲器驱动模式,CB,eff的相对变化越大,JR也就越大,即互连线宽度和间距的减小会导致JR值的增大.通过增加互连线间距或加入屏蔽线的方法可以有效减小JR值,但会导致布线面积增加;通过增强缓冲器驱动强度可以减小信号的绝对抖动范围并减小tpmax值,但却增加了缓冲器寄生电容,从而增加了系统功耗.为此,笔者提出一种自适应驱动方式,通过欲传送信号比较分析,确定CB,eff的变化情况,以产生驱动强度控制信号,保证信号驱动强度与CB,eff相对应,有效减小了tpmax与tpmin的差值,使不同情况下的信号传播延迟时间趋于一致,从而减小了JR值.而JR的减小可以有效提高长互连结构的工作频率[1].因此,对于相同的工作频率要求,与缓冲器驱动方式相比,这种方法可以通过减小布线间距获得更小的布线面积,并可通过减小最大驱动强度以降低功耗.图3 自适应驱动器图3(a)为自适应驱动方法结构图.in[n]为路由器间第n条互连线上传送的数据,in[n-1],in[n+1]为其相邻线上的数据.编码控制单元首先记录上一时钟周期传送的该条及相邻线上的数据int-1[n-1],int-1[n],int-1[n+1],同当前时钟周期欲传送数据int[n-1],int[n],int[n+1]进行逻辑比较,得到该时刻信号传送所需的驱动等级,并产生5位控制信号,分别控制驱动模块中的5对NMOS及PMOS管,使相应类型驱动管全部导通或部分导通.这种可变驱动强度的驱动方式与变化的有效负载相配合,保持传播延迟时间的稳定,从而有效抑制了信号抖动.为了保证信号传输与时钟传输具有相同的传播延迟时间,可将时钟线进行屏蔽处理.3.2 自适应控制单元设计图3(b)为自适应控制单元结构图.3条相邻线上的当前时钟周期数据int[n-1],int[n],int[n+1]与D触发器锁存得到的前一时钟周期数据int-1[n-1],int-1[n],int-1[n+1]传送至驱动等级编码产生电路,经过逻辑比较,判断得出驱动等级,再将此驱动等级进行编码,输出位宽为5的控制信号(用于调整驱动强度)至驱动单元. 具体的编码产生逻辑为:3.3 驱动单元设计驱动单元的5对NMOS,PMOS驱动管采用三态逻辑进行控制,如图3(c)所示.当驱动信号为高时,驱动管对相当于缓冲器,否则驱动管对截止.根据信号线有效负载可以计算出驱动管对的宽长比,并根据Hspice仿真结果进一步修正.4 仿真结果根据SIMC 0.13μ m工艺参数,互连线长取2mm,间距S和宽度W取0.4μ m.令缓冲器驱动模式的驱动强度和自适应驱动的最大驱动强度相同,采用Hspice软件,得到两种驱动模式不同输入情况下的信号传播延迟时间,如表1所示.缓冲器驱动模式的JR为34.1%,而自适应模式的 JR仅为4.5%,减小了29.6%.由于驱动单元逻辑门(与非门、或非门)的逻辑努力值大于反相器,自适应驱动模式的传播延迟时间增加了30ps,使自适应驱动模式的最大传播延迟时间增加了6%(可通过增加逻辑门中晶体管宽度的方式减小这一差值).由于差值所占比例较小,笔者忽略了这一差值对相对抖动与绝对抖动对应性的影响.表1 互连线的宽度和间距为0.4μ m时信号的传播延迟时间和相对抖动缓冲器驱动298 340 377 415 452 34.1自适应驱动 463 472 485 481 482 4.5将以上仿真结果的信号波形叠加得到图4所示的眼图.缓冲器驱动模式下,信号绝对抖动值达到154ps,而自适应驱动模式的绝对抖动值仅为22ps,明显减小了信号抖动.图4 不同驱动模式下的信号眼图对比图5 不同宽度和间距下的信号抖动改变互连线宽度(间距),仿真得到JR值,整理得到图5.可见,随着间距和宽度的减小,缓冲器驱动模式下的JR急剧增大,而自适应驱动模式下,JR最大仅为6.7%,抑制抖动的效果很好.以上结果表明,自适应驱动可以有效地降低容性串扰引起的信号抖动,显著减小时钟周期要求,从而提高路由器间信号传输的工作频率.5 总结根据互连线三线模型,笔者给出有效容性负载的解析表达,提出了一种根据有效负载确定驱动强度的自适应驱动长互连的驱动方法.与缓冲器驱动模式相比较,令缓冲器驱动方法的驱动强度和自适应驱动的最大驱动强度相同,当互连线的宽度和间距为0.4μ m时,信号的相对抖动减小了29.6%,有效地提高了长互连线的最高工作频率.随着特征尺寸的减小,线间串扰将进一步加剧,这种方法也将更为有效.参考文献:[1] Lee S J,Lee K,Yoo H J.Analysis and Implementation of Practical,Cost-effective Networks on Chips[J].Design&Test of Computers,2005(22):422-433.[2] Pamunuwa D,Tenhunen H.Repeater Insertion to Minimise Delay in Coupled Interconnects[C]//Conf VLSI waukee:IEEE CS Press,2001:513-517.[3] Chen Mingdeng,Silva-M artinez J,Nix M,et al.Low-voltage Low-power LVDS Drivers[J].Solid-State Circuits,2005(40):472-479.[4] Victor B,Keutzer K.Bus Encoding to Prevent CrosstalkDelay[C]//IEEE/ACM Int'l puter-Aided Design(ICCAD01).Milwaukee:IEEE CS Press,2001:57-63.[5] 张恒龙,顾华玺.片上网络拓朴结构研究[J].中国集成电路,2007(11):42-46.Zhang Henglong,Gu Huaxi.Research of Network on Chip Topology[J].China Integrated Circuit,2007(11):42-46.[6] Lee K M,Lee S J,Kim S E.A 51mW 1.6GHz Network for Low-power Heterogeneous SoC Platform[C]//ISSCC Dig of Tech.New York:IEEE Press,2004:152-153.[7] 张富彬,何庆延,彭思龙.调整门和连线尺寸以减小串扰的拉格朗日松弛法[J].计算机工程与科学,2007(29):73-76.Zhang Fubing,He Qingyan,Peng Silong.Gate and Wire Sizing for Crosstalk Reduction by LagrangianRelaxation[J].Computer Engineering&Science,2007(29):73-76.[8] Rossi D,Metra C.Exploiting ECC Redundancy to Minimize Crosstalk Impact[J].Design&Test of Computer,2005(22):59-70.[9] 刘毅,杨银堂,王乃迪.采用相邻耦合动态功耗优化的低功耗布线方法[J].西安电子科技大学学报,2007,34(5):712-715.Liu Yi,Yang Yintang,Wang Naidi.Low Power Routing Method Based on Reducing Adjacent Signal Coupling Dissipation[J].Journal of Xidian University,2007,34(5):712-715.。
基于SoC的实时信号处理系统中存储系统
基于SoC的实时信号处理系统中存储系统在现代信息社会中,系统因为其灵便性及便利性得到了越来越广泛的用法。
采纳技术可以将囫囵系统集成到单个芯片之中,其具有体积小、分量轻、功耗小、IP复用等优点。
SoC技术目前正成为嵌入式实时系统进展的一个趋势,得到越来越广泛的应用。
系统的纠错和容错能力具有非常重要的意义。
这里的容错是指当部分存储器件损坏无法工作时,系统可以有效地利用冗余器件,通过硬件检测或软件命令配置,使存储系统能够继续正常工作。
纠错是指当读写数据中浮现一位或多位数据出错时,系统自动计算出正确数据的机制,通常状况下,是通过被动硬件冗余防止故障造成差错。
常用的办法有三模冗余(TMR)、N模冗余、表决技术等。
但此类办法所需附加硬件多,花费代价十分昂贵,同时造胜利耗、分量及体积增大无数。
当系统发生故障时,通过对囫囵系统举行替换来保证囫囵存储系统的牢靠性;另一方面,此类办法因为欠缺灵便性,假如多个冗余部分同一位置上的芯片都发生故障,则囫囵系统仍然无法用法,备份效率也不是很高。
本文针对潜入式实时数字信号处理系统的特点,重新组织DDR存储颗粒的结构,添加冗余颗粒和相关寄存器,改写控制IP,设计了一种新的具有容错纠错自适应功能的二级冗余存储体系结构。
它仅需增强少量的冗余器件就可以容忍系统中较多数目的器件故障。
在系统没有故障的状况下,存储颗粒可以采纳海明码等E码举行纠错;当系统中部分器件浮现故障时,系统可以通过软件配置或硬件自动检测,自动利用冗余模块举行容错;当故障进一步增多时,可以适当降低系统的纠错能力,若错误过多,还可以将原先用于纠错的颗粒改为用于容错,使系统能够继续正常地工作。
通过数学模型的量化分析,新的存储系统容错计划可以有效地提高存储系统的牢靠性。
存储系统容错计划系统结构容错存储系统工作流程冗余存储颗粒排放方式采纳二级冗余的组织形式,囫囵存储系统容错第1页共6页。
基于SOC的实时操作系统的研究
基于SOC的实时操作系统的研究随着科技的迅速发展,实时操作系统在众多领域中发挥着越来越重要的作用。
尤其在复杂系统领域,如航空、航天、工业控制等,实时操作系统已成为关键技术的核心。
针对复杂系统的特点,本文将基于SOC(System on a Chip)探讨实时操作系统的重要性和研究现状,并提出未来研究的方向和建议。
SOC是指将整个系统或子系统中的多个功能模块集成在一颗芯片上的系统架构。
实时操作系统是指能够在规定时间内对外部事件做出响应,并控制任务执行和资源分配的操作系统。
实时操作系统具有高可靠性、低延迟性和高度灵活性等特点,广泛应用于关键任务处理和实时响应要求高的场景。
近年来,针对SOC实时操作系统已进行了大量研究。
在优点方面,这些系统能够提供高效的资源利用率、降低功耗和成本,并提高系统的可靠性和安全性。
然而,在缺点方面,SOC实时操作系统也面临着一些挑战,如复杂的硬件设计、软件集成和调试等问题。
同时,目前的研究还存在着实时任务调度、内存管理和通信机制等方面的空白,需要进一步加以解决。
SOC实时操作系统的设计方法需要考虑以下关键要素。
时间约束是实时操作系统的核心,必须确保任务在规定时间内完成。
实时处理要能够快速响应外部事件,并及时处理任务。
通信机制是实现任务之间和系统与外部设备之间有效沟通的关键,需要加以优化以确保系统的实时性。
实现SOC实时操作系统需要考虑以下技术。
硬件设计需要考虑芯片的选型、处理器架构、内存和I/O接口等关键要素。
软件设计需要选择合适的编程语言和开发工具,并考虑操作系统的内核设计、任务调度、内存管理和设备驱动程序等。
算法优化也是实现实时操作系统的关键,例如针对实时任务调度的优化算法、内存管理的哈希表算法等。
SOC实时操作系统在众多领域都有广泛的应用,以下列举其中几个领域。
在航空领域,SOC实时操作系统可用于飞机的导航、控制和通信系统,提高飞行的安全性和可靠性。
在航天领域,SOC实时操作系统可用于卫星、火箭和空间站的控制和指挥系统,确保空间任务的顺利进行。
soc与mcu的时间戳同步机制
soc与mcu的时间戳同步机制一、背景介绍在许多嵌入式系统和物联网应用中,系统级芯片(SOC)和微控制器(MCU)常常需要协同工作。
它们之间的数据传输和事件同步对于整个系统的稳定运行至关重要。
其中,时间戳的同步机制是实现这一目标的关键技术之一。
时间戳能够记录事件发生的时间,为数据传输和事件处理提供准确的时间参考。
因此,建立一个高效、可靠的时间戳同步机制对于SOC和MCU之间的协同工作至关重要。
二、总体架构SOC与MCU的时间戳同步机制主要包括以下几个部分:1. 时间戳生成器:用于生成唯一的时间戳,以标识事件发生的时间。
2. 通信接口:用于在SOC和MCU之间传输时间戳和其他控制信号。
3. 时间戳同步算法:用于根据传输的时间戳和其他信息,实现SOC和MCU之间的时间戳同步。
4. 时间戳处理模块:用于对接收到的时间戳进行解析和处理,以实现相应的事件触发和处理。
三、详细设计1. 时间戳生成器时间戳生成器应具有高精度、唯一性、不可篡改等特点。
常用的时间戳生成器有基于硬件时钟的生成器和基于全球定位系统(GPS)的生成器。
对于基于硬件时钟的生成器,需要考虑时钟频率的准确性和稳定性;对于基于GPS的生成器,需要考虑GPS信号的可用性和可靠性。
2. 通信接口通信接口应具有高可靠性、低延迟等特点。
常用的通信接口有UART、SPI、I2C 等。
在选择通信接口时,需要考虑其数据传输速率、传输距离、抗干扰能力等因素。
同时,为了确保时间戳的实时传输,还需要考虑通信协议的设计,如数据包格式、校验方式等。
3. 时间戳同步算法时间戳同步算法应具有高精度、实时性等特点。
常用的时间戳同步算法有基于时间差值的同步算法和基于时间偏移量的同步算法。
基于时间差值的同步算法通过比较发送端和接收端的时间戳差值来调整接收端的时间戳;基于时间偏移量的同步算法通过测量发送端和接收端的时钟偏移量来调整接收端的时间戳。
在实际应用中,需要根据具体场景选择合适的同步算法。
《基于SoCFPGA的实时行人检测系统研究与实现》范文

《基于SoC FPGA的实时行人检测系统研究与实现》篇一一、引言随着科技的快速发展,实时行人检测技术在许多领域如智能安防、自动驾驶等具有广泛应用。
本文提出了一种基于SoC (System on a Chip)FPGA(Field Programmable Gate Array)的实时行人检测系统,该系统不仅具备高效的检测性能,还拥有实时的响应速度。
本文将详细介绍该系统的研究与实现过程。
二、相关技术背景SoC FPGA是一种集成了处理器、存储器和其他可编程逻辑的芯片,具有高度的可定制性和灵活性。
而行人检测技术则是通过图像处理和计算机视觉等方法,从图像或视频中检测出人体目标的过程。
近年来,基于深度学习的行人检测技术得到了广泛的应用。
三、系统设计本系统设计主要分为硬件设计和软件设计两部分。
硬件设计采用SoC FPGA作为核心处理器,通过优化硬件资源分配,实现高效的图像处理和计算能力。
软件设计则采用深度学习算法进行行人检测,包括卷积神经网络(CNN)等。
四、硬件设计实现在硬件设计方面,我们首先对SoC FPGA进行了详细的分析和选择,根据系统的需求,选择了合适的FPGA芯片。
接着,我们设计了硬件架构,包括图像采集模块、数据处理模块、存储模块等。
其中,图像采集模块负责获取图像数据,数据处理模块负责对图像数据进行处理和计算,存储模块则负责存储处理结果和数据。
此外,我们还对硬件资源进行了优化分配,以提高系统的性能和响应速度。
五、软件设计实现在软件设计方面,我们采用了深度学习算法进行行人检测。
首先,我们选择了合适的深度学习模型,如卷积神经网络(CNN)等。
接着,我们通过训练模型来提高检测精度和性能。
在训练过程中,我们采用了大量的行人图像数据,通过不断调整模型参数和优化算法,使模型能够更好地适应不同的环境和场景。
最后,我们将训练好的模型嵌入到FPGA中,实现实时行人检测。
六、系统测试与性能分析我们通过实验对系统的性能进行了测试和分析。
基于SOPC技术的实时视频跟踪系统
基于SOPC技术的实时视频跟踪系统
张兴玉;孙学宏
【期刊名称】《科技信息》
【年(卷),期】2008(000)029
【摘要】城市消防安全远程监控系统是加强公共消防安全管理的一项重要科技手段,对强化单位消防安全管理,前移火灾预防关口,快速处置火灾,提高城市防控火灾的综合能力,具有十分重要的作用.在此提出一种基于SOPC的一种视频实时跟踪系统,采用处理速度较快的FPGA芯片,利用数字图像处理和数字信号处理技术,达到对目标进行自动检测、定位、跟踪等目的,该方法不但能可靠地检测业目标和较强的实时性.而且具有良好的扩展性,可以方便、快捷地完成系统的维护和升级.
【总页数】2页(P68-69)
【作者】张兴玉;孙学宏
【作者单位】宁夏公安消防总队,宁夏,银川750001;宁夏大学物理电气信息学院,宁夏银川750021
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于SOPC技术的多路并行ECG实时检测分析系统的设计 [J], 王彬;戴厚德;周山宏;江国泰
2.一种基于FPGA的实时视频跟踪系统硬件平台设计 [J], 刘紫燕;冯亮;祁佳
3.一种基于DSP的实时视频跟踪系统设计 [J], 刘望军;张可为;陈军根
4.基于Linux的嵌入式实时视频跟踪系统 [J], 史涛;裴海龙
5.基于SOPC技术的实时图像采集系统设计 [J], 葛继;唐宏
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SOPC的实时目标跟踪系统设计及实现

基于SOPC的实时目标跟踪系统设计及实现张贺云;吴黎明;肖湘;陈泰伟【期刊名称】《自动化与信息工程》【年(卷),期】2011(032)006【摘要】实时目标跟踪系统的实现是基于System Generator系统来搭建实时的目标跟踪算法,编译生成VHDL/Verilog代码,在ISE集成软件环境中进行综合、实现,设计出一种基于SOPC的实时目标跟踪系统。
系统采用处理速度较快的FPGA芯片,利用数字图像处理和数字信号处理技术,实现对目标进行智能检测、提取、识别和跟踪等目的。
%Real-time target tracking System realization is based on System Generator to create real-time target tracking algorithm, compile generation VHDL/Verilog code, in ISE integrated software environment, realize comprehensive. Authors design a SOPC based on the real-time target tracking System, adopting processing speed faster FPGA chip, using digital image processing and digital signal processing technology to realize the intelligent detection, extraction, identify, and tracking. The system has good expansibility, can be convenient, fast complete system maintenance and upgrades.【总页数】4页(P25-28)【作者】张贺云;吴黎明;肖湘;陈泰伟【作者单位】广东工业大学信息工程学院;广东工业大学信息工程学院;广东工业大学信息工程学院;广东工业大学信息工程学院【正文语种】中文【中图分类】TP317【相关文献】1.基于FPGA的实时空中目标跟踪系统设计与实现 [J], 宁成军;史忠科2.基于SoPC的温度和时钟实时显示系统设计 [J], 范志荣;史凌艳;黄乡生3.基于SOPC的现场总线多通道实时温度采集系统设计 [J], 王延年;邢雷;张帅4.基于SOPC的以太网实时数据采集系统设计与实现 [J], 梅大成;柴志勇5.基于SOPC的以太网实时数据采集系统设计与实现 [J], 梅大成;柴志勇因版权原因,仅展示原文概要,查看原文内容请购买。
NMC监控工具使用指南及应用案例
NMC监控工具使用指南及应用案例概述 ..................................................................... ........................................................................ .................................... 2 系统要求 ..................................................................... ........................................................................ ............................ 3 架构 ..................................................................... ........................................................................ .................................... 4 部署 ..................................................................... ........................................................................ (5)部署环境(以NC,WAS垂直集群为例) .................................................................... (6)部署步骤 ..................................................................... ........................................................................ .................... 6 进程监控 ............................................................................................................................................. .. (13)功能概述 ..................................................................... ........................................................................ (13)MW-XX的监控 ..................................................................... ........................................................................ . (13)DB-XX的监控 ..................................................................... ........................................................................ ........ 16 线程监控 ..................................................................... ........................................................................ .. (19)功能概述 ..................................................................... ........................................................................ (19)线程信息说明 ............................................................................................................................................. . (21)监控设置 ..................................................................... ........................................................................ (22)汇总显示 ..................................................................... ........................................................................ (24)显示过虑 ..................................................................... ........................................................................ (25)联查操作员 ..................................................................... ........................................................................ .. (26)联查数据库 ..................................................................... ........................................................................ .............. 27 数据库 ............................................................................................................................................. (27)功能概述 ..................................................................... ........................................................................ (27)监控客户端功能 ..................................................................... ........................................................................ ...... 27 CPU监控 ..................................................................... ........................................................................ . (31)功能概述 ..................................................................... ........................................................................ (31)监控客户端功能 ..................................................................... ........................................................................ ...... 31 内存监控 ..................................................................... ........................................................................ .. (31)功能概述 ..................................................................... ........................................................................ (31)监控客户端功能 ..................................................................... ........................................................................ ...... 32 日志抽取 ..................................................................... ........................................................................ .. (32)功能概述 ..................................................................... ........................................................................ (32)NC客户端日志级别设置 ..................................................................... (32)日志数据库 ..................................................................... ........................................................................ .. (33)NCLOG日志抽取 ............................................................................................................................................. (35)抽取JVM日志 ..................................................................... ........................................................................ .. (40)抽取CPU .................................................................... ........................................................................ (42)抽取内存日志 ..................................................................... ........................................................................ . (44)监控消息和快照信息日志 ..................................................................... .. (46)操作员信息 ..................................................................... ........................................................................ .............. 47 消息中心 ..................................................................... ........................................................................ .. (48)功能概述 ..................................................................... ........................................................................ (48)监控客户端功能 ..................................................................... ........................................................................ ...... 50 安全设置 ..................................................................... ........................................................................ .. (52)功能概述 ..................................................................... ........................................................................ (52)监控客户端功能 ..................................................................... ........................................................................ ...... 52 参数设置 ..................................................................... ........................................................................ .. (53)功能概述 ............................................................................................................................................. (53)监控客户端功能 ..................................................................... ........................................................................ ...... 53 应用案例一 ..................................................................... ........................................................................ . (54)OVERVIEW ........................................................... ........................................................................ .. (54)进程监控 ..................................................................... ........................................................................ (54)线程监控 ..................................................................... ........................................................................ (56)日志抽取 ..................................................................... ........................................................................ (58)DB-监控 ..................................................................... ........................................................................ . (62)消息中心 ..................................................................... ........................................................................ .................. 62 应用案例二某项目时常出现有几分钟登录不了NC ..................................................................... .. (67)问题描述: .................................................................... ........................................................................ (67)问题分析: .................................................................... ........................................................................ (67)问题解决方案: .................................................................... ........................................................................ . (75)概述对于NC这样一个复杂庞大的系统而言,监控体系非常重要而且富于挑战性。
基于SOPC的深空目标实时跟踪系统

基于SOPC的深空目标实时跟踪系统
叶有时;唐林波;赵保军;蔡晓芳
【期刊名称】《系统工程与电子技术》
【年(卷),期】2009(031)012
【摘要】提出一种用可编程片上系统技术实现深空目标检测跟踪系统的方法,该系统采用单片FPGA构建双核系统,其中一个CPU进行检测跟踪,另一个CPU进行通信控制,将软硬件设计有机融为一体.根据不同算法对数据精度要求的不同,将浮点运算和定点运算结合在一起,并使用定制指令、自定义逻辑和C2H等硬件加速技术,减少了处理时间.实测结果表明,该系统可对深空红外目标进行实时检测跟踪.
【总页数】5页(P3002-3006)
【作者】叶有时;唐林波;赵保军;蔡晓芳
【作者单位】北京理工大学信息科学技术学院电子工程系,北京100081;北京理工大学信息科学技术学院电子工程系,北京100081;北京理工大学信息科学技术学院电子工程系,北京100081;北京理工大学信息科学技术学院电子工程系,北京100081
【正文语种】中文
【中图分类】TN941.1
【相关文献】
1.基于多传感器多目标实时跟踪视觉系统在全自主机器人上的应用 [J], 王培屹
2.基于ARM和DSP空中运动目标实时跟踪系统研究 [J], 王永;熊显名;李小勇
3.基于Nios Ⅱ软核的人脸目标实时跟踪系统 [J], 金纯
4.基于运动分析的运动目标实时跟踪系统 [J], 鞠升辉;李杨民
5.基于Blackfin BF549的嵌入式动态目标实时跟踪系统设计 [J], 姚晨;杨园园因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 3 卷 第 1 期 4 5
V L3 o 4
・
计
算
机
工
程
20 0 8年 8月
Aug t 20 8 us 0
No. 5 1
Co mput rEng ne r ng e i ei
博士论文 ・
文 编 l o 3 8 0 )—0 6 o 章 号: o - 4 ( 0 l _0 _ 3 文 标 码; 0 _ 2 2 8 5_l _ 献 识 A
C ri t o s h 构架 的实 时跟踪机制 为参考 ,分析 了在 N C 环境 中实现 实时跟踪数据传输 的难点 ,提 出相应 的解 决方案 。通过对实验系统 的仿 eg o 真 ,验证 了其 中的关键技术 。
关健诃 :实 时跟踪 ; 跟踪 数据 流复用 ;跟踪 数据流量控制
Re l m e T a i g Da a T a s iso C. a e o a Ti r cn t r n m s i n i N0 b s d S C n
现一个稳定、高效 的系统需要有效 的软硬件调试方法 。处理
器 内核在 S C设 计中处于 核心地位 ,而 内核 的软硬件调试也 o 是 S C调试 的重点。 o
采集 后的数据 必须通过一 定的通 信机 制传输到芯片外 的
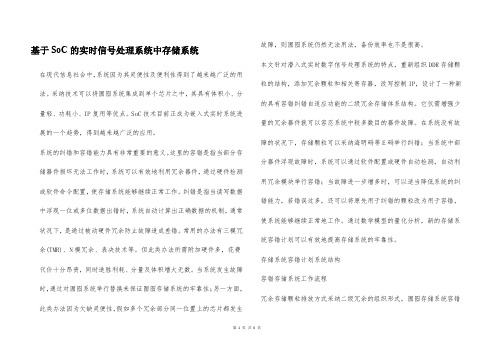
数据分析终端 。因此 ,在 A M oei t R C rs h 构架 中定义 了跟踪 g 总 线 ( R T ae u, T 跟 踪 聚 合 器 (rc un l 、 A M rc sA BI) B o、 Tae n e F ) A B 复 用器 (T e l aoI 、 跟踪 端 1 元(rc ot T A B R pi tr『 c ) 3单 Tae P r Itr c nt 及跟踪缓存( mbd e rc ufr nef eU i a ) E e ddTaeB f H) e 。这些 模 块结合起来 , E M 产生的跟踪数据提供传输的通道 , 为 T 如
a d p o o e h o u i n r p s st e s l t on whih i e fe y e p rme t l i c sv r i d b x e i i n a multo s s ai n .
[ e o d lra t e ai ; ai n l l i ; ai t f w cn o K y r s el m c g t c g i mu pe n t c g a o t l w t n r n lk t x g r n d a i r i l or
T NG S a X a g, N We A h n, U Qin DI G i
(. ra n mmu ia o t r a oaoy B in nvri f ot adT lcmmu iain, e ig10 7 ; 1 B odBadCo nc t nNewokL b rtr, e igU ies yo P s eeo i j t sn nct sB in 0 8 6 o j
a p i a l O No b s d s s e e e t e ta s isono a e a ar qu r sn w o c r sd e t t ly d fe e t o p lc b e t C— a e y t ms wh r n m s i ft c d d t e i e c n e n u t a l if r n mmu i a i n m e h im . h r r e oo c n c t c a s An o n i — p h a a y i fAR n de t n sso M l o e i h a ea c i c u es o e c a l n e . ta a y e ed f c ly o a me d t a s s i n ta k n n No c r sg tt c h t t r h wsn w h l g s I n l z st i u t fr l t a atn mi so c i g i C, r r e e h i e i r r
2 De at n o o ue ce c . pr me t f mp tr in e& E gn e n , hn s ies yo n o g Ho gKo g C S n ie r g C ie eUnv ri f i t Ho g K n , n n )
[ b t c ]T e o cnq e ca gs n h mm n a o S C da a cl . s sl c r n t c gt h i e a o r d y A s a t h C t h i s h n e o — i c r N e u c p o u i t ni a o rm t a y A r u , ur tr i c n u s r n t e i ci n i l ae t e a n e q e a l
中 i  ̄ —0 i — T4 ; 'N2 z
基 于 N C 的 S C 中实 时跟踪 数据 的传输 o o
唐 杉 ,徐 强 ,丁 炜
(. 1 北京邮 电大学宽带通信 网络研究室 ,北京 10 7 ;2 香港 中文大学计算机科学与工程 学系 ,香港) 086 .
摘
要:片上网络( o ) N C技术使片上系统(o ) SC 的通信机制发 生了根 本改变 ,直接影响 了 S C中处理器内核的实 时跟踪技术 。该文 以 A M o R
^
1 概述
片 上系统(o ) S C 在为各种 电子设备提供更高性能 的同时 ,
极大提升 了软硬件设计 的复杂度 。在上市时 间的压力下 ,实
实现对内核的数据采集。通过可配置的触发(i e 和过滤 tg r rg )
(ie) ftΒιβλιοθήκη 条件 ,E M 能够灵活地控制在何种情况 下对 哪些数据 l T 进行采集 和压 缩。