汽车动力转向器转向力矩的分析与计算
汽车电动助力转向机构的设计讲解

汽车电动助⼒转向机构的设计讲解汽车电动助⼒转向机构的设计引⾔在汽车的发展历程中,转向系统经历了四个发展阶段:从最初的机械式转向系统(Manual Steering,简称MS)发展为液压助⼒转向系统(Hydraulic Power Steering,简称HPS),然后⼜出现了电控液压助⼒转向系统(Electro Hydraulic Power Steering,简称EHPS)和电动助⼒转向系统(Electric Power Steering,简称EPS)。
装配机械式转向系统的汽车,在泊车和低速⾏驶时驾驶员操纵负担过于沉重,为了解决这个问题,美国GM公司在20世纪50年代率先在轿车上采⽤了液压助⼒转向系统[1]。
但是,液压助⼒转向系统⽆法兼顾车辆低速时的转向轻便性和⾼速时的转向稳定性,因此在1983年⽇本koyo公司推出了具备车速感应功能的电控液压助⼒转向系统。
这种新型的转向系统可以随着车速的升⾼提供逐渐减⼩的转向助⼒,但是结构复杂、造价较⾼,⽽且⽆法克服液压系统⾃⾝所具有的许多缺点,是⼀种介于液压助⼒转向和电动助⼒转向之间的过渡产品。
到了1988年,⽇本Suzuki公司⾸先在⼩型轿车Cervo上配备了Koyo公司研发的转向柱助⼒式电动助⼒转向系统;1990年,⽇本Honda 公司也在运动型轿车NSX上采⽤了⾃主研发的齿条助⼒式电动助⼒转向系统,从此揭开了电动助⼒转向在汽车上应⽤的历史。
第1章概述1.1电动助⼒转向的优点与传统的转向系统相⽐,电动助⼒转向系统最⼤的特点就是极⾼的可控制性,即通过适当的控制逻辑,调整电机的助⼒特性,以达到改善操纵稳定性和驾驶舒适性的⽬的。
作为今后汽车转向系统的发展⽅向,必将取代现有的机械转向系统、液压助⼒转向系统和电控制液压助⼒转向系统[2]。
相⽐传统液压动⼒转向系统,电动助⼒转向系统具有以下优点:(1)只在转向时电机才提供助⼒,可以显著降低燃油消耗传统的液压助⼒转向系统有发动机带动转向油泵,不管转向或者不转向都要消耗发动机部分动⼒。
汽车动力转向系统设计说明书

1 绪论1.1汽车转向系统概述转向系统是汽车底盘的重要组成部分,转向系统性能的好坏直接影响到汽车行驶的安全性、操纵稳定性和驾驶舒适性,它对于确保车辆的行驶安全、减少交通事故以及保护驾驶员的人身安全、改善驾驶员的工作条件起着重要作用。
随着现代汽车技术的迅速发展,汽车转向系统已从纯机械式转向系统、液压助力转向系(HPS)、电控液压助力转向系统(EHPS),发展到利用现代电子和控制技术的电动助力转向系统(EPS)及线控转向系统(SBW)。
按转向力能源的不同,可将转向系分为机械转向系和动力转向系。
机械转向系的能量来源是人力,所有传力件都是机械的,由转向操纵机构(方向盘)、转向器、转向传动机构三大部分组成。
其中转向器是将操纵机构的旋转运动转变为传动机构的直线运动(严格讲是近似直线运动)的机构,是转向系的核心部件[2]。
动力转向系除具有以上三大部件外,其最主要的动力来源是转向助力装置。
由于转向助力装置最常用的是一套液压系统,因此也就离不开泵、油管、阀、活塞和储油罐,它们分别相当于电路系统中的电池、导线、开关、电机和地线的作用。
通常,对转向系的主要要求是:(1) 保证汽车有较高的机动性,在有限的场地面积内,具有迅速和小半径转弯的能力,同时操作轻便;(2) 汽车转向时,全部车轮应绕一个瞬时转向中心旋转,不应有侧滑;(3) 传给转向盘的反冲要尽可能的小;(4) 转向后,转向盘应自动回正,并应使汽车保持在稳定的直线行驶状态;(5) 发生车祸时,当转向盘和转向轴由于车架和车身变形一起后移时,转向系统最好有保护机构防止伤及乘员1.1.1机械式转向系统汽车的转向运动是由驾驶员操纵方向盘,通过转向器和一系列的杆件传递到转向轮来完成的。
机械式转向系统工作过程为:驾驶员对转向盘施加的转向力矩通过转向轴输入转向器,减速传动装置的转向器中有1、2 级减速传动副,经转向器放大后的力矩和减速后的运动传到转向横拉杆,再传给固定于转向节上的转向节臂,使转向节和它所支承的转向轮偏转,从而实现汽车的转向。
汽车动力转向系齿轮齿条式的设计设计说明书

中文摘要为了减轻驾驶员转动方向盘的操作力,利用动力产生辅助动力的装置称为转向动力机构。
现代汽车都采用动力转向辅助系统,使驾驶员的转向操作变得方便、省力。
本文主要介绍了齿轮齿条式动力转向器的设计计算以及结构设计。
对转向系的要求,转向系的主要参数,动力转向系的要求,动力转向的组成和工作原理,以及动力转向系布置方案的选择和确定等作了详细的介绍。
并且对所需要的辅助油泵作了计算和选择。
关键字:齿轮齿条式,动力转向,设计计算AbstractIn order to reduce the driver turned the steering wheel operating force, the use of power auxiliary power produced the device is called to the motor. It made the driver change direction conveniently and save his labouring. This text mostly introduced the design and the count of the integery type of circulating rack and pinion steering along with the design of structure. And it particularly introduced the need of steering system, the main parameters of steering system, the need of power steering system , the make-up and the principle of power steering system ,and how to select and ascertain the established scheme of power steering system,It is emphasized the design and the count, also reckon and select the pump.Keywords: Rack and pinion steering,power steering,design and count中文摘要 (I)Abstract .................................................................................................................... I I 前言 (1)第一章转向系统设计方案论证 (2)§1-1 转向系的概述 (2)§1-2 动力转向系统概述 (4)§1-3 齿轮齿条式转向器与其它型式转向器的比较 (6)§1-4 电控液压动力转向系统的工作特性 (7)第二章齿轮齿条转向器设计及校核 (10)§2—1 齿轮齿条转向器种类的选择 (10)§2—2 前轴负荷的确定 (12)§2—3 转向系的主要性能参数计算 (13)§2—4 齿轮齿条转向器的计算及校核 (16)第三章电控液压动力转向系统的设计及验证 (24)§3—1 EHPS系统设计方案选择 (24)§3—2 EHPS系统的设计计算 (27)§3—3 动力转向系统方案校核 (35)第四章毕业设计结论与小结 (38)致谢 (40)参考文献 (41)本次毕业设计在高晓宏老师的指导下进行。
汽车转向器毕业设计说明书

汽车转向器毕业设计说明书汽车转向器是汽车的重要组成部分,也是决定汽车主动安全性的关键总成,它的质量严峻阻碍汽车的操纵稳固性。
随着汽车工业的进展,汽车转向器也在不断的得到改进,尽管电子转向器已开始应用,但机械式转向器仍旧广泛地被世界各国汽车及汽车零部件生产厂商所采纳。
而在机械式转向器中,循环球齿条-齿扇式转向器由于其自身的特点被广泛应用于各级各类汽车内。
本文选择GX1608A型循环球齿条-齿扇式转向器作为研究课题,其要紧内容有:汽车转向器的组成分类;转向器总成方案分析及其数据确定和转向器的设计过程。
这种转向器的优点是,操纵轻便,磨损小,寿命长。
缺点是结构复杂,成本高,转向灵敏度不如齿轮齿条式。
因此逐步被齿轮齿条式取代。
但随着动力转向的应用,循环球式转向器近年来又得到广泛使用。
关键词;转向器操纵稳固性循环球齿条-齿扇式转向器AbstractGear cars an important component of the initiative is decided automobile safety of the key assembly, It seriously affected the quality of the vehicle handling and stability. Along with the development of the auto industry, automobile steering gear is continuously improved, although the electronic steering gear has begun to use But mechanical steering gear is still widely been world motor vehicles and parts manufacturers adopted. And the mechanical steering gear, Rack cycle ball-type steering gear tooth fans as its own characteristics has been widely used in various types vehicles. The graduation design options GX1608A cycle gear ball-type steering gear rack as a research topic, Its main contents are : automotive steering gear components classification; assembly was to program analysis and data to identify and steering gear design process.The advantage of such steering gear, and manipulating light, wear and tear, long life. The disadvantage is that the structure is complicated and costly, than steering rack and pinion sensitivity. Therefore gradually being replaced by rack and pinion. However, with the power steering applications, the ball-type steering gear cycle and are widely used in recent years.Keywords;Diverter Ball handling and stability Cycle rack-type steering gear diverter目录摘要................................................................... 错误!未定义书签。
汽车转向系统力矩波动分析与改进

车辆工程技术1车辆技术汽车转向系统力矩波动分析与改进曾正强(一汽解放汽车有限公司柳州分公司,广西 柳州 545000)摘 要:将转向系统中相关零件厚度作为设计变量,以转向系统一阶固有频率和质量为目标进行灵敏度分析,确定对转向系统一阶固有频率影响较大的零件,通过调整对应零件的厚度值,使转向系统振动特性满足要求。
本文基于汽车转向系统力矩波动分析与改进展开论述。
关键词:汽车转向系统;力矩波动;分析与改进1 力矩波动说明 通常情况下,转向管柱与转向中间轴大多采用不等速万向节结构,当驾驶员通过方向盘输入转向力矩时,必然会产生力矩波动。
为了避免力矩波动的生成,必需同时满足两个条件:①转向管柱、中间轴、转向器输入轴三者的中心线位于同一平面内;②转向管柱和中间轴的中心线夹角与中间轴和转向器输入轴中心线的夹角相等。
由于驾驶室内的空间布置局限,转向系统的各个零部件与周边件相互制约,只能在有限的空间里整体考虑布置方案,因此上述2个条件很难同时满足。
从转向传动机构进行优化设计,降低转向力矩波动就显得尤为重要。
转向传动机构由两个万向节组合构成,且各段的传动轴并不会布置在同一平面内,因此必需考虑两个万向节主动叉的相位角问题,对于由一个十字叉万向节连接的两段传动轴来说,两段轴的夹角(指所夹锐角)越小其传动效率越高,也就越平顺。
因此对于多段式的传动轴形式的转向机构,我们也需要按照“等效夹角越小,传动性能越好”的方式进行设计,而等效夹角与转向管柱的空间布置息息相关,要想获得最佳的传动性能,即便在转向传动机构的空间布置已确定的情况下,我们也可以通过相位角的调整来完成进一步的优化。
2 转向系统模态的测试方法 怠速工况下,转向系统激励主要来自发动机曲轴往复运动产生的惯性力,对于常见的四冲程发动机,怠速工况频率f0可通过式(1)计算:f0=N60i2 (1) 式中,N 为曲轴转速,i 为气缸数,怠速工况下曲轴转速在(800±50)r/min,对应的发动机怠速激励频率约为25.00~28.33Hz。
汽车转向系统性能检测与评价分析

• 机动车方向盘的最大自由转动量不允许 大于:
• (1)最高设计车速不小于100km/h的机 动车:20°;
• (2)三轮汽车:45°;
• (3)其他机动车:30°。
• 2)方向盘转向力
• 机动车在平坦、硬实、干燥和清洁的水 泥或沥青道路上行驶,以10km/h的速度在
• 5s之内沿螺旋线从直线行驶过渡到直径为 24m的圆周行驶,施加于方向盘外缘的最 大切向力不应大于245N。
ab之间距离称为主销后倾拖距 力矩YL称为稳定力矩
在YL力矩作用下,将使车轮 回复到原来中间的位置,从而 保证了汽车稳定的直线行驶。 此力矩称为稳定力矩。
但此力矩也不宜过大,否 则在转向时为了克服此力矩, 驾驶员必须在转向盘上施加较 大的力(即转向沉重)。
因稳定力矩的大小取决于 力臂L的数值,而力臂L又取决 于后倾角γ的大小。现在车辆一 般采用的γ角不超过2°~3°现 代高速汽车由于轮胎气压降低 弹性增加,而引起稳定力矩增 加,因此γ角可以减小到零甚至 为负。
第四章
汽车转向系统性能检测与评价
多媒体课件
4.1汽车转向系统性能评价指标
• 1操纵性与稳定性
•汽车操纵性----驾驶员以最少的修正而能维 持汽车按给定的路线行驶以及按驾驶员愿望 转动转向盘以改变汽车行驶方向的能力。
• 操纵性能的评价: • (1)在规定车速下,汽车质心曲线轨迹与
转向盘转角的关系;
②气候条件
③左右车轮运动状态
2.转向操纵轻便性
• 转向操纵轻便性——驾驶员操纵转向盘的 容易程度。
• 转向沉重容易使驾驶员产生驾驶疲劳或使 车辆操纵失控而导致交通事故。通常采用 转向助力装置。
• 转向助力装置:液压助力、气压助力、电 动机助力
转向器最大齿条力的计算与验证

Ca l c ul a t i o n a nd Va l i d a t i o n o f Ma x Ra c k Fo r c e f o r S t e e r i ng Ge a r
Wa n g We n j i a n , Z h a n g L e i
计助力过大 , 造成 了性能浪费和成本上升。
原地转 向阻力矩可根据经验公式f 2 _ 3 ] :
VG ' , / p
( 1 )
式中: 厂 为轮胎和路面 间的滑动摩 擦系数 , 一般 取 0 . 7 左
右; Mr 为转 向阻力矩 , N・ m; G为前轴 负荷 , N ; P为轮胎
客
3 4 第4 期
车Байду номын сангаас
技
术
与
研
究
BUS & COA CH TECH NOLO GY AND RESEARCH
转向器最大齿条力的计算与验证
王文建 ,张 雷
2 3 6 0 0 1 ) ( 江 淮汽 车技术 中心 乘用 车研 究院 , 合肥
摘 要 : 乘 用车 转 向 系统 的 匹 配设 计 中 , 齿条 力 的 确 定 至 关重 要 , 最 大 齿 条 力 的计 算 为 转 向 系统 匹 配 设 计 提供依据。 本 文 结合 实 际 工作 经 验 , 对 转 向 系统 最 大 齿 条 力 的计 算 进 行 研 究和 验 证 。 该 方 法在 CAE整 车 模
By t h i s me t h o d , t h e ma x r a c k f o r c e c a n b e c a l c u l a t e d o u t b e f o r e t h e c a r CAE mo d e l b u i l d i n g ,t h u s a l o t o f t i me i s
动力转向器控制阀数学建模

动力转向器控制阀的数学建模摘要:本论文基于转阀式液压动力转向器,建立了动力转向器控制阀的数学模型,以便能够更好对液压动力转向器的进行分析、优化,进而提高转向器的性能。
关键词:转阀式液压动力转向器数学模型转向力特性曲线中图分类号:th137 文献标识码:a 文章编号:1674-098x(2012)04(a)-0134-02rotating valve power steering gear improved mathematical modelingabstract:this paper based on rotating valve hydraulic power steering, set up a mathematical model of hydraulic power steering, indicators to better hydraulic power steering gear on the analysis and optimization, thus improving steering performance.key words:rotating valve,hydraulic power steering, mathematical model, the steering force curve1 引言在国内对于转阀式液压动力转向器的研究时间不长,同时由于其专业性太强,还没有系统的对设计、生产、试验、装车的操纵性等完整的研究。
为了能够对动力转向器的操纵性能有一个明确定义,本论文基于转阀式液压动力转向器,进行了详细的理论分析,建立了动力转向器控制阀的数学模型。
2 动力转向器控制阀的数学建模动力转向器系统是通过改变转向控制阀的阀口通流面积来实现对系统压力、流量和方向的控制,这种控制阀结构就是我们常说的液压放大元件。
液压放大元件是一种以机械运动来控制流体动力的元件;它既是一种能量转换元件,也是一种功率放大元件。
汽车电动助力转向系统跑偏分析与解决措施

汽车电动助力转向系统跑偏分析与解决措施摘要:汽车电动助力转向(Electric-Power-Steering,简称EPS)系统,作为一种新型的汽车动力转向系统,是辅助驾驶员进行转向操作的转向系统,能够提高汽车安全性能,节约能源,有利于环保,是一项紧扣现代汽车发展主题“安全、节能、环保”的高新技术。
电动助力转向系统一经出现就受到国内外汽车公司和设计人员的重视。
本文对汽车电动助力转向系统跑偏分析与解决措施进行分析,以供参考。
关键词:电动助力转向系统;行驶跑偏;转向回正引言车辆行驶跑偏是指汽车在干燥平坦道路上直线行驶,在对方向盘不加任何力的情况下,车辆自动向一侧方向偏离原行驶轨迹的现象。
GB7258—2017《机动车运行安全技术条件》中规定:机动车在平坦、硬实、干燥和清洁的道路上行驶不应跑偏,方向盘(或方向把)不应有摆振等异常现象。
1功能安全的商用车电动助力转向系统近年来,随着汽车集成化、智能化程度的不断提高,汽车电子系统的复杂程度也在同步增加。
为进一步提升汽车电子、电气系统的功能安全,相关国际标准《道路车辆功能安全》(ISO26262:2018)和国家标准《道路车辆功能安全》(GB/T34590—2017)相继出台。
汽车转向系统作为车辆基础性功能器件,其性能直接影响到车辆的操纵稳定性和安全性。
随着电子技术在汽车中的广泛运用,转向系统也较多地采用了电子器件,其中汽车电动助力转向(EPS)系统也越来越多地被应用在汽车上,EPS系统功能安全设计因此也成为了影响车辆安全行驶的重要因素。
我国从2022年起开始实施国家标准《汽车转向系基本要求》(GB17675—2021),该标准明确指出,所有符合标准适用范围内的车辆均应满足功能安全开发要求;此外,该标准附录B中还规定了转向电子控制系统在功能安全方面的文档、安全策略及验证确认的具体要求。
对于汽车转向系统的功能安全设计及验证方法,国内外学者也开展了大量研究。
“汽车在中高速行驶时应防止线控转向系统发生非意向性转向力矩大于转向力矩边界值”和“汽车在中高速行驶时应防止线控转向系统发生无法转向”这2个功能安全目标和功能安全概念,并分别开展了相关设计及测试验证;针对汽车转向系统概念阶段的开发,提出了具体的测试场景及测试结果评价的安全度量参数;基于汽车EPS系统功能安全设计,提出了一套硬件在环测试方法,并验证了该EPS系统安全机制的设计效果;尚世亮等对汽车电子电气系统故障注入方法、整车可控性指标进行了详细表述和系统性总结。
基于汽车转向系统力矩波动优化分析

" 坫
坫 越骨啦定啦 ¨
" ”
—500
-300
-100
i00
300
50C
方向盘转角(d《)
图9
方向盘转角.转向传动比曲线
VS
图7转向传动比波动灵敏度分析
Fig.7 Sensitivity analysis
on
Fig.9
Curves of steering wheel angle
steering
drive ratio
2
墨
丢一o 斜 _|抖.o
2 6
.i O —10U
一,U U
50
10C
图8相位角
Fig.8
车轮itil'61fr移(t rim)
Phase angle
图6
Fig.6
车轮垂向位移-夕h倾角曲线 表1
VS
Curves of wheel vertical displacement camber angle
的一致性,基于该模型可以开展进一步的分析工作; 而转向系角传动比波动明显,需要进一步优化改进.
由于驾驶室空间和布置等原因,只能在有限空 间内和固定位置对转向系进行布置,上述2个条件 难以满足,需要对转向系中影响力矩波动的关键参 数进行优化分析. 1.2转向力矩与角传动比之间的关系 转向角传动比指方向盘转角增量与车轮转角增 量之间的比值
5
结束语
应用Adams/Car对转向系统进行DOE分析,找
到对转向传动比波动影响最大的因素,为转向系统 的设计开发提供重要支持.针对影响最大的因素相
位角进行优化,找到使转向传动比波动最小时的相 位角最优值,并在实车上得到验证.
图11
Fig.1
汽车转向系统力矩波动分析与改进

Internal Combustion Engine&Parts规律,研究表明当柴油机压缩比达到17.6时,易引起燃烧恶化,结构优化中宜控制整机压缩比不大于17.6。
③计算分析柴油机额定转速下90%、100%负荷,供油提前角对柴油机性能影响规律,当供油提前角Δφps=16.5°CA~17°CA为时刻,柴油机常用工况90%负荷下最低燃油消耗率204.1g/kWh,柴油机长期运转综合性能较合适。
参考文献:[1]周龙保,刘忠长,高宗英.内燃机学[M].三版.北京:机械工业出版社,2011,4.[2]沈颖刚.EGR对可变压缩比SI发动机燃烧及排放特性的影响[J].2014,9.[3]刘永长.内燃机热力过程模拟[M].北京:机械工业出版社,2001,12.0引言转向传动装置通常由转向管柱和中间轴组成,中间轴由两个万向十字节及滑动花键部分组成,主要用来传递驾驶员施加于方向盘上的转向力及路面通过车轮振动反馈回来的逆向力。
因乘用车驾驶室内空间布置的需要,中间轴轴线与转向管柱轴线、转向器输入轴轴线间往往存在夹角,也就不可避免的存在转向力矩波动问题,影响车辆驾驶的品质。
转向系统设计中要求转向力矩波动控制在10%以内,本文通过获取的某车型转向系统硬点坐标,对转向力矩波动进行理论分析,并根据分析结果,提出了改进方案。
1转向力矩波动1.1力矩波动说明通常情况下,转向管柱与转向中间轴大多采用不等速万向节结构,当驾驶员通过方向盘输入转向力矩时,必然会产生力矩波动。
为了避免力矩波动的生成,必需同时满足两个条件:①转向管柱、中间轴、转向器输入轴三者的中心线位于同一平面内;②转向管柱和中间轴的中心线夹角与中间轴和转向器输入轴中心线的夹角相等。
由于驾驶室内的空间布置局限,转向系统的各个零部件与周边件相互制约,只能在有限的空间里整体考虑布置方案,因此上述2个条件很难同时满足。
从转向传动机构进行优化设计,降低转向力矩波动就显得尤为重要。
转向系统设计规范

中重型卡车设计规范(转向系统)编制:校对:审核:批准:技术中心年月日前言中、重型汽车转向阻力矩较大,因此往往在原有的机械转向系统上加装一套转向助力系统,从而减少驾驶员的转向力矩,达到转向灵活轻便的目的,重型汽车的转向助力系统往往借助汽车本身的装置提供动力,因此统称为动力转向系统。
重型汽车在加装转向助力系统之后,必须只起助力作用而不改变原转向机构的特性,同时对动力转向系统还有如下要求:1.确保转向安全可靠2.转向灵敏操纵轻便3.保持正常直线行驶和转向自动回正4.保持路感5.随动作用一、转向系主要参数及其选择转向系统涉及的参数有:1、原地转向阻力矩Mr ;2、转向器适用前轴负荷G1;3、系统最大压力P ;4、系统最大流量Q;5、管路外径D外;6、转向梯形设计1.1原地转向阻力矩Mr汽车在沥青或混凝土路面上的原地转向阻力矩Mr,推荐用半经验公式:Mr=μ3×G3/P (N·mm)[1]式中μ-轮胎和路面间的滑动摩擦系数,一般取0.7;G–实载前轴负荷,单位为N,该值由实载质量确定。
P-轮胎气压,单位为MPa。
1.2 转向器适用前轴负荷G1,单位为Kg,由整车匹配决定。
可在现有转向器资源上选用。
该参数可初步决定转向器品种,因而可知道转向器动力缸缸径D。
1.3 系统最大压力P:P=4MrπD2rwipη,式中 rw—齿扇啮合半径;Ip—转向机构力传动比,该值一般取1;η—转向器正效率1.4 系统最大流量Q:Q=π2D2dsnP14(1-Δ)ηv[2]式中 ds——初选转向器转向螺杆直径。
n——由人机工程学得知,方向盘的转动的频率为n=(0.5~1.2)S-1,对货车来说,可取较小值0.6;P1——转向器螺杆螺距;Δ——内泄漏系数,范围为0.05~0.10,可取0.1。
ηv——转向油泵容积效率,范围为0.75~0.85,可取0.8。
上式中,ds 、P1由转向器生产厂提供。
1.5 转向操纵力的校核:动力转向操纵力与转向器扭杆和分配阀都有关,目前尚无计算公式,一般由生产厂控制,对于操纵轻便的要求,转向操纵力不应超过(100~150)N。
汽车系统动力学转向系统动力学及控制
高速行驶时,为防止回正超调。当转向盘转到中间位置时,电控单 元将使电动机电流逐渐减少,电动机将产生一个与转速成正比的阻力矩, 使其对转向轮产生回正阻尼,使汽车获得稳定的转向特性。
(3) 阻尼控制 高速行驶时,如果路面有高频的干扰,转向盘便会在中间位置附近
16.4电动助力转向系统
➢关键技术
• EPS助力特性的曲线特征
EPS的助力特性具有多种曲线形式,下图为三种典 型助力特性曲线。图中助力特性曲线可以分成三个区, 分别为无助力区,助力变化区和助力不变区。
I/A I/A
I/A
Imax
V=0
Imax
V=0
V=Vmax
Td0 Tdmax Td/N·m
a)直线型
1
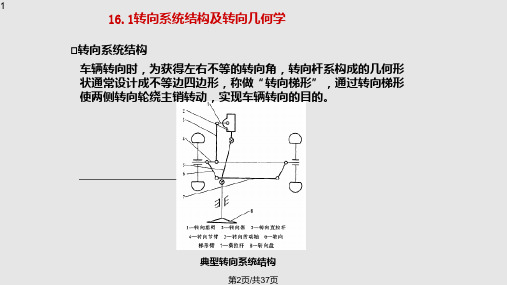
16.1转向系统结构及转向几何学
□转向系统结构 车辆转向时,为获得左右不等的转向角,转向杆系构成的几何形 状通常设计成不等边四边形,称做“转向梯形”,通过转向梯形 使两侧转向轮绕主销转动,实现车辆转向的目的。
典型转向系统结构
第2页/共37页
2
16.1转向系统结构及转向几何学
□转向几何学
阿克曼转向几何原理 cot o cot i tkp / L o 为外侧转向轮转角, i 为内侧转向轮转 角,L 为车辆轴距, tkp 为两主销轴线与
第26页/共37页
20
25
16.4电动助力转向系统
➢关键技术
• 曲线型助力特性曲线的函数表示
0 I K (V ) f (Td )
I max
0 Td Td 0 Td 0 Td Td max
Td Td max
I/A
汽车动力转向器转向力矩的分析与计算

"
积简化为
2 (3 #
具有以下突出的优点: (#) 电动机和减速机构安装在转向柱或装在转向器内, 从而使整个动力转向器重 量减轻、 结构紧凑且安装方便; (!) 以电动机为动力, 不需要传统的液压元件— — —转向油泵、 油管及控制 通过传感器和控制系统, 能使直流电动机提供与汽车转向工况 阀等, 也不会发生液压油泄漏和损耗; (%) 相适应的驱动扭矩, 也就是说转向驱动扭矩可随转向阻力矩的变化 (增大或减小) 而变化, 而无控制系统 的动力转向器不可能实现; (-) 电动机只在需要时启动, 故耗用电能较少; (*) 可安装应用于各类车型 & 汽车转向力矩的分析与计算是进行汽车电动动力转向器测控系统的设计与软件开发的重要依据, 本文拟在这方面做些研究 &
!
汽车转向力矩影响因素的分析
[*] 由于影响汽车转向力矩的因素很多, 首先根据汽车转向机构的受力分析 , 可以推导出汽车方向盘
上的转向力矩为 ! 2, 3 " ! 6 % ! 7 $ ! 5, # 0 ! $ ! 5, $ ! 5, 4 " 4 #4 2 #. #4 (#)
式中, 转向机传动比; ! 2 为作用在转向臂上的转向力矩;# .、 # 4 分别为转向杆系、 ! 5, ! 5, 0、 4 分别为相对 转向节销轴线、 转向机的摩擦力矩 & 作用在两个转向节销上的力矩之和 ( ! 6 8 ! 7) 为 ( ! 6 % ! 7) ( ’ ;, [ )* " ( ) " % # & "( ! 6 % ! 7) !# % 96:!! % 96:!" " { !]% 6 ( ’ ;, 7) + ) 96:" $, ( , 6 ( , 7) [ )* " ( ) " % # !]%( !+ , "( + 596:" 6 % !+ , 7) $, %" 96:" ( !+ , ( !+ , !96:" "}%( !+ , !96:" ")% 6 ( !+ , 7) 6 % !+ , 7)% 6 ( !+ , 7) $96:" $96:" # # ( ’ ;, [ )* " 96:" )&" (( , 6 % , 7) 96:" ! (( ’ ;, ! % - " 96:" "] "( 6 % ’ ;, 7) 6 ( ’ ;, 7) $) 96:" $ # # ( , 6 ( , 7) [ ) "* ( - " ( . 6 % . 7) [ - < % )" + ]% + ]( $, $, # #
汽车转向力矩波动率的设计计算

图1转向操纵机构
由于受整车布置空间的限制,上述两个条件是难以满足的。这就需要对转向操纵机构进行优化设计。对于由1个十字叉万向 节连接两段传动轴的传动结构来说,两段轴的夹角(指锐角)越小传动效率越高,也越平顺。对于由2个万向节联结而成的转向操 纵机构,由于各段传动轴的布置不在同一平面内,因此需要考虑万向节的相位角问题,在上万向节交点确定后可以通过调整相位角 来进一步的优化。 2.2相位角 转向轴中心线(1ineI)和中间轴中心线(1ineⅡ)形成的平面(PlaneI)与转向器输入轴中心线(1ine m)和中间轴中心线(1ine Ⅱ)形成的平面(PlaneⅡ)之间交角为(见图2)。定义为假设Plane I固定不动,PlaneⅡ绕lineⅡ顺时针旋转与Plane I重合的角度。 设计中间轴的相位角为中间段下端的十字叉相对中间段上端的十字叉顺时针转过角度(见图3)。观察方向从驾驶室端至转向器
作。E—mail:yun车转向力矩波动率的设计计算
李付军 郑州日产汽车有限公司
河南郑州450016
【摘要】转向力是汽车操纵稳定性评价中的重要指标,转向操纵机构的力矩波动率是影响转向传动平顺性的重要指标,它直 接影响着驾驶员的驾驶感觉,正确地匹配相位角能够有效地减少转向力矩的波动率。本文详细地阐明了汽车转向系统力矩波动原 理,并对某车型转向系统力矩波动情况进行了设计计算说明。 【关键词】汽车,转向力矩,波动率,设计计算 1前言 转向操纵机构包括转向盘、转向管柱、中间轴及万向节。为了满 足整车布置、整车装配等方面的需求,通常在转向柱与中间轴之间、 中间轴与转向器输入轴之间安装两个万向节,如图1所示。由于万向 节的不等速传动,不可避免地带来转向力矩的波动,此波动给驾驶员 带来操纵力的时轻时重,从而影响驾驶员的舒服性,并造成疲劳,给 行驶带来潜在的危险。因此,在转向系统布置过程时,要考虑减少转 向力矩的波动。 2转向力矩波动原理 2.1转向力矩波动 通常情况下,转向操纵机构均采用不等速万向节,当向转向盘施 以转向力时必然引起力矩的波动。为了避免力矩波动,需要满足2个 条件:a.转向管柱、中间轴和转向器输入轴中心线在一个平面内;b.转 向柱和中间轴的夹角与中间轴和转向器输入轴的夹角相等。
汽车电动助力转向系统PPT课件
助力转向系统的要求
• 对转向系统的要求,主要概括为转向的灵敏度和操纵的轻 便性。高的转向灵敏度,要求转向器具有小的传动比,以 小的转向盘转角迅速转向,好的操纵轻便性,则要求转向 器具有大的传动比,这样才能以较小的转向盘操纵力获得 大的转向力矩。 • 实际应用中,一般要求:当转向轮达到最大设计转角时, 转向盘总转数不宜超过5圈,而转向盘操纵力最大不超过 250N
由于汽车高速化后,地面对行路机构和转 向系统的冲击力明显增大。从而,对行驶的安 全性、操纵性、稳定性提出更高的要求。为此, 电控动力转向系统,在各类汽车上普遍装用, 已成为必备的装置。 优点和具体功能: 1、减小转向时的操纵力—减轻司机的疲劳程 度,特别是装用超低压扁平胎的乘用车更为必 要。
2、根据车速的高低和行驶条件的变化(静态或动态; 好路或坏路),提供合适的转向助力,提高汽车行 驶的安全性、操纵性、稳定性。 3、具体功能如下: (1)原地转向或低车速行驶转向时—操纵轻便,路 感良好。 (2)中、高速行驶转向时—根据车速的高低,适 当助力;车速愈高,助力愈小,使司机有一定的轻、 重手感,无转向发飘的感觉。
(二)电动助力转向国家政策支持
• 原机械工业部汽车司在1999年《未来十年中国汽车工业产 品与技术发展》报告中,就将电动助力转向列为我国汽车 工业积极开展研究的产品与技术项目; • “十五”国家863电动汽车重大科技专项、 “十一五”国 家863节能与新能源汽车重大专项都把电动助力转向列为子 项目作为电动汽车优先发展的零部件产品;
转向系统的分类
传统液压式助力转向系统 电子控制式液压助力转向系统
电动助力转向系统
传统液压式助力转向系统
• 机械式的液压助力转向系统一般由液压泵、油管、压力流 量控制阀体、V型传动皮带、储油罐等部件构成。 • 无论车是否转向,这套系统都要工作,而且在大转向车速 较低时,需要液压泵输出更大的功率以获得比较大的助力。 所以,也在一定程度上浪费了资源。还有,机械式液压助 力转向系统由液压泵及管路和油缸组成,为保持压力,不 论是否需要转向助力,系统总要处于工作状态,能耗较高, 这也是耗资源的一个原因所在。
实验项目二--汽车转向参数检测

实验项目二汽车转向参数检测一、实验教学组织(1)集中讲授仪器、设备的结构和工作原理。
(2)讲解实验内容、注意事项及操作步骤。
(3)根据实验目的、要求进行分组。
(4)在教师指导下,各组学生自己独立操作,并对实验、检测数据进行记录。
(5)教师总结实验情况。
二、实验学时2学时。
三、实验目的(1)掌握汽车转向系统转向盘自由转动量、转向力、最大转向角等参数的检测方法。
(2)熟悉实验仪器、设备的工作原理及使用方法。
(3)熟悉GB7258—2012《机动车运行安全技术条件》及GB18565—2001《营运车辆综合性能要求和检验方法》中有关规定及要求。
四、实验要求(1)遵守实验仪器、设备操作规程。
(2)记录实验数据,并根据数据分析实验车辆转向系统的可靠性与稳定性。
(3)结合实验数据完成实验报告。
五、实验内容测定实验车转向盘的自由转动量;测量转向轮的最大转向角;测量转向盘的最大转向力。
六、实验仪器、设备转向参数检测仪1台转盘(车轮定位仪附件)2个实验车1辆七、转向参数检测仪结构和工作原理图2.1所示为国产ZC-2型转向参数检测仪,该仪器由操纵盘、主机箱、连接叉和定位杆四部分组成,具有测试转向盘自由行程、转向角和转向力的功能。
操纵盘实际上是一个附加转向盘,用螺栓固定于三爪底板上;底盘与连接叉间装有力矩传感器,以测出转向时的操纵力矩;连接叉通过装在其上的长度可伸缩的活动卡爪与被测转向盘连接;主机箱固定在底盘中央,内装力矩传感器、接口板、微机板转角编码器、打印机和电池等;从底板下伸出的定位杆,通过磁座吸附在驾驶室内仪表盘上,其内端与装在主机箱下部的光电装置连接。
使用时,把转向测量仪对准被测转向盘中心,调整好三只伸缩爪的长度,使之与转向盘牢固连接后,转动操纵盘的转向力,通过底板、力矩传感器、连接叉传递到被测转向盘上,使转向轮偏转从而实现汽车转向。
此时,力矩传感器把转向力矩转变成电信号,定位杆内端所连接的光电装置将转向角的变化转换为电信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮转向角! " 的大小来决定是否给以助力及给予多大的助力系数 ) (/) 快速曲线行驶时 (汽车速度" 较高) , 汽车转向力矩可由式 (*) 和式 (&) 简化为 ( ’ ! % ’ ") [ # #$ $!%! * 2 ( 3 # ( ,, $!%! & ’ %( (- , $ "( & ’ " + ( # ) #]%( ! ! % ! ") 4 $ ! % (- , ")(6) " ! 考虑到快速曲线行驶时车轮转向角并不 大, 式中第一行的重力回正项和第二行比较起 来无关重要 ) 同时考虑到此时内外车轮侧向 力之差 ( !! 7 !") 及内外车轮回正力矩之差 34;) 即汽车转向力矩可 + !" + !、 (- , ! + (- , " + (, 进一步简化为 * 2 ( 3 # ( ,, & !& ’ % (- ) 4 $( (.) 即在汽车快速曲线行驶时, 进行转向器有 效控制的关键是计算转向力矩 & ( !&2 - (- ) 这 一主要部分 ) 实验和理论分析表明, 在一定的 条件下, 轮胎的侧向力 ! 、 回正力矩 (- 、 相对
$76
三峡大学学报 (自 然 科 学 版)
$&&" 年 6 月
程应用提供了直接的参考 !
!
与向心加速度有关的部分转向力矩 ( 的最小二乘拟合 ! !" " # # $ )
在图 " 所示的实验曲线拟合过程中, 首先将实验曲线离散化, 即利用实验曲线读取拟合数据点, 考
虑到既要保证拟合精度, 又不使工作量过大, 可将横、 纵坐标每格各划分成 # 份, 即横坐标的读数误差为 纵坐标的读数误差 " ! $ % " ! # % $! ( )* ・ ( )* ・ (其中 " ! $ 表示是最 " ! $ % " ! # % & " $ ’ & " &"$(, +) ’ & , "$(! +) 小读数单位的一半) ! 然后将读取的实验数据点坐标组成矩阵, 输入到利用目前工程应用中最流行的 -./0.1 软件编成的 程序中进行处理 ! 在处理过程中, 首先逐个处理每一具体情况下的数据点, 对低于 "& 次的各次多项式 逐个同时画出实验曲线和拟合曲线进行比较, 保证两曲线在同一相对向心加速度 # 下的部分转向力矩 ( 之差不大于纵坐标读数误差 & " "$(! ( )* ・ , 同时要使在大于实验相对向心加速度 # 的一 $ $% ) 2 &’ ) +) 定范围内 ( 3 ", 的拟合曲线走势和实验曲线走势一致, 并对大于实验相对向心加速 # 的拟合曲 "" " &4() 为了适应工程应用的要求, 在满足上述 线数据点进行比较, 取数据走势更为满意的拟合多项式 ! 最后, 条件下的拟合多项式中, 选取较低次的多项式作为最终这种情况下的拟合多项式解析式 ! 经上述最小二乘拟合后, 根据实验曲线拟合出的部分转向力矩 ( 与相对向心加速度 # 的 $ $% ) 2 &’ ) 解析式关系如下: 当车胎内压 ( ’ "!4( 大气压、 结构引迹 % ) ’ $! 5+ 时 ( $ $% ) ) &’ )* "6 " &&67 # 7 + 7& " 7&8" # 8 ) $" " (&87 # $ ) "4 " "($( # ) & " &47$ 结构引迹 % ) ’ "! 5+ 时 当车胎内压 ( ’ " " 4( 大气压、 ( $ $% ) ) &’ )* "8 " $"8( # 7 + 87 " 6944 # 8 ) "4 " #"66 # $ ) "$ " $99# # ) & " "7$9 结构引迹 % ) ’ &! 5+ 时 当车胎内压 ( ’ " " 4( 大气压、 ( $ $% ) ) &’ )* "$ " 777( # 7 + 8" " &8&4 # 8 ) "7!("98 # $ ) 4 " 6(#( # ) & " &989 结构引迹 % ) ’ : "! 5+ 时 当车胎内压 ( ’ " " 4( 大气压、 ( $ $% ) ) &’ )* "7!64"4 # 7 + 84!$6($ # 8 ) "9 " 89"6 # $ ) " " &"(( # ) & " "$6( 结构引迹 % ) ’ &! 5+ 时 当车胎内压 ( ’ " " ( 大气压、 ( $ $% ) ) &’ )* "( " "88" # 7 + 8" " (""4 # 8 ) 4 " (&4( # $ ) "$ " 7977 # ) & " &"68 当车胎内压 ( ’ $ 大气压、 结构引迹 % ) ’ &! 5+ 时 ( $ $% ) ) &’ )* "" " #6"( # 7 + 8& " (&$9 # 8 ) "7 " 9(($ # $ ) 6 " 6696 # ) & " # ("$) 图 " 为在不同的结构引迹时, 与向心加速度有关的部分转向力矩和相对向心加速度的关系曲线, 其 中, 实线为实验曲线, 虚线为拟合多项式曲线 ! 这表明, 在实验相对向心加速度 # 的范围内实验曲线和 拟合多项式曲线符合很好, 精度较高 (由于两条曲线非常逼近, 这时在图中已分不清虚实线) , 可以说拟 合很有效 ! ("") ("&) (9) (#) (4)
汽车动力转向器转向力矩的分析与计算
丁礼灯 杨家军 刘 照 廖道训
-%""+-) (华中科技大学 机械科学与工程学院,武汉
具有节省能源、 结构简单紧凑等 摘要:随着 !# 世纪日益突出的能源问题和汽车产品的电子化发展, 显著优点的电子控制式电动动力转向器将是未来汽车动力转向器设计的发展方向 & 针对这一应用要 求, 根据汽车转向机构的受力分析得到的转向力矩, 对影响汽车转向力矩的主要因素进行了分析, 并 具体对与向心加速度有关的部分转向力矩的实验曲线用最小二乘法进行了解析式拟合 & 关键词:汽车; 动力转向器; 转向力矩; 最小二乘拟合 中图分类号:./!-%&* 文献标识码:0 文章编号:#""+$+"1# (!""#) "%$"!-%$"-
但是, 由于该力矩表达式极为复杂, 且式中各作用力相互影响, 受影响因素较多, 所以在实际设计工 作中, 很难应用这个公式进行控制算法设计, 因而有必要进行简化, 找出其中的关键要素, 从而得到便于 工程应用的表达式 ) (*) 在汽车开始启动即静止状态时 (汽车速度" + #) , 汽车的转向力矩主要为原地转向阻力矩 ( ,, 它和前轴负荷 ( ’ ! - ’ ") 、 轮胎气压 ’ 及车胎和地面间的滑动摩擦系数( 有关, 可采用下面的半经验公
随着 !# 世纪日益突出的能源问题和汽车产品的电子化发展, 目前在中型以上货车和中级以上轿车 上广泛采用的液压助力式动力转向器将会被逐渐淘汰, 而由效率更高、 适应性更强的电子控制式电动动
[#-] 力转向器替代 & 为此, 世界各工业发达国家都在积极开发应用电动动力转向器 , 国内目前尚处于起 步阶段 & 该类转向器由各种传感器、 控制器、 直流电动机和传动机构等组成, 属于一种高科技产品 & 它
具有以下突出的优点: (#) 电动机和减速机构安装在转向柱或装在转向器内, 从而使整个动力转向器重 量减轻、 结构紧凑且安装方便; (!) 以电动机为动力, 不需要传统的液压元件— — —转向油泵、 油管及控制 通过传感器和控制系统, 能使直流电动机提供与汽车转向工况 阀等, 也不会发生液压油泄漏和损耗; (%) 相适应的驱动扭矩, 也就是说转向驱动扭矩可随转向阻力矩的变化 (增大或减小) 而变化, 而无控制系统 的动力转向器不可能实现; (-) 电动机只在需要时启动, 故耗用电能较少; (*) 可安装应用于各类车型 & 汽车转向力矩的分析与计算是进行汽车电动动力转向器测控系统的设计与软件开发的重要依据, 本文拟在这方面做些研究 &
[ ( ’ ! % ’ ") ( # #$ $!%! ( ,, $!%! & ,& ’ " , 1) $!%! &) # $!%! $ "( & ’ " + ( # ) #)% ( #" ( $] 4 )! - " , " ", ! *#) (5) 可见此时汽车转向力矩与车轮转向角成正比, 即在这种情况下, 可根据具体载荷和路面情况, 由车
[.] 式计算 / ( ’ ! % ’ ") (0・11) (/) ( ) ( / ’ 这种情况下可根据经验及具体车胎、 车型和载荷情况, 给电动机以固定的助力系数 ) (&) 在汽车作低速曲线行驶时 (汽车速度" 较低) , 汽车转向力矩可由式 (*) 和 (&) 忽略 / 个小量的乘