ECT和PWM模块
单片机PWM输出接口设计与应用
单片机PWM输出接口设计与应用导言单片机(Microcontroller,简称MCU)作为现代电子科技领域的一个重要组成部分,广泛应用于各个领域,如家电、汽车电子、工业自动化等。
其中,PWM (Pulse Width Modulation,脉冲宽度调制)技术是单片机中重要的功能之一,通过对固定频率的方波的占空比调节,实现对输出信号的精确控制。
本文将介绍单片机PWM输出接口的设计与应用,包括PWM原理、接口设计步骤以及常见应用案例。
一、PWM原理PWM技术是一种将模拟信号转换为数字信号的调制技术,通过调整数字信号的脉冲宽度来控制输出信号的电平。
实现PWM的关键在于控制器对方波的占空比进行调节。
PWM信号的频率是固定的,周期为T,通常单位为微秒。
占空比(Duty Cycle)是指方波中高电平部分所占的时间比例,通常用百分比来表示。
占空比的改变决定了输出信号的高低电平持续时间的变化,从而控制被驱动设备的工作状态。
二、单片机PWM输出接口设计步骤1. 确定单片机型号:选择适合的单片机芯片,具有PWM功能的引脚或专用PWM模块。
2. 确定输出电平及频率:根据实际需求确定输出信号的高低电平以及频率。
不同的应用场景对电平和频率的要求可能不同。
3. 确定占空比调节方式:PWM信号的占空比调节方式有多种,包括软件调节和硬件调节。
软件调节可以通过对PWM寄存器进行编程来实现,而硬件调节一般是通过外部模块或电位器进行调节。
4. 连接外部电路:根据选定的单片机型号和引脚,将单片机的PWM引脚与外部电路(如LED、电机等)进行连接。
5. 编写程序:根据选定的单片机型号和开发环境编写相应的PWM输出程序。
在程序中设置PWM的频率、占空比以及相关参数。
6. 调试与测试:将单片机连接至供电电源,并通过示波器或其他测试工具观察PWM信号的波形,确保输出正常。
三、单片机PWM输出接口的应用1. LED亮度控制:通过PWM技术可以实现对LED灯的亮度控制。
PWM模块介绍

PWM模块介绍⼿把⼿教你写S12XS128程序--PWM模块介绍该教程以MC9S12XS128单⽚机为核⼼进⾏讲解,全⾯阐释该16位单⽚机资源。
本⽂为第⼀讲,开始介绍该MCU的PWM模块。
PWM 调制波有8个输出通道,每⼀个输出通道都可以独⽴的进⾏输出。
每⼀个输出通道都有⼀个精确的计数器(计算脉冲的个数),⼀个周期控制寄存器和两个可供选择的时钟源。
每⼀个P WM 输出通道都能调制出占空⽐从0—100% 变化的波形。
PWM 的主要特点有:1、它有8个独⽴的输出通道,并且通过编程可控制其输出波形的周期。
2、每⼀个输出通道都有⼀个精确的计数器。
3、每⼀个通道的P WM 输出使能都可以由编程来控制。
4、PWM 输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM 计数器为0时,改变周期和脉宽才起作⽤。
6、8 字节或16 字节的通道协议。
7、有4个时钟源可供选择(A、SA、B、SB),他们提供了⼀个宽范围的时钟频率。
8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每⼀个通道都可以通过编程实现左对齐输出还是居中对齐输出。
1、PWM启动寄存器PWMEPWME 寄存器每⼀位如图1所⽰:复位默认值:0000 0000B图1 PWME 寄存器每⼀个PWM 的输出通道都有⼀个使能位P WMEx 。
它相当于⼀个开关,⽤来启动和关闭相应通道的PWM 波形输出。
当任意的P WMEx 位置1,则相关的P WM 输出通道就⽴刻可⽤。
⽤法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第⼀个波形可能是不规则的。
当输出通道⼯作在串联模式时(PWMCTL 寄存器中的CONxx置1),那么)使能相应的16位PWM 输出通道是由PWMEx 的⾼位控制的,例如:设置PWMCTL_CON01 = 1,通道0、1级联,形成⼀个16位PWM 通道,由通道 1 的使能位控制PWM 的输出。
STC单片机PWM的实现方法
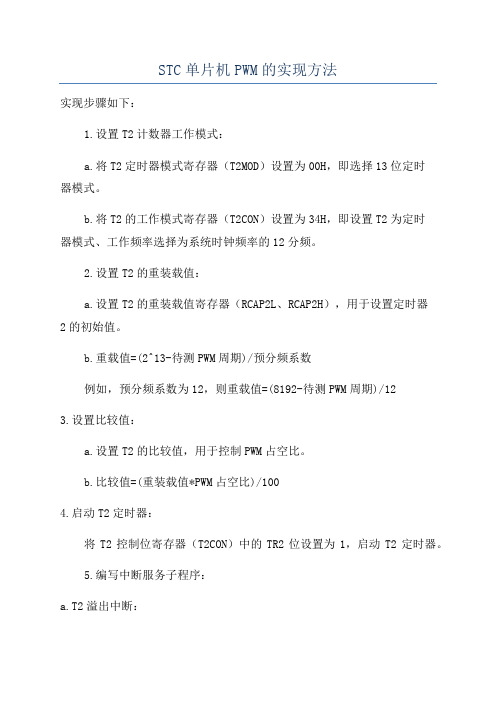
STC单片机PWM的实现方法实现步骤如下:1.设置T2计数器工作模式:a.将T2定时器模式寄存器(T2MOD)设置为00H,即选择13位定时器模式。
b.将T2的工作模式寄存器(T2CON)设置为34H,即设置T2为定时器模式、工作频率选择为系统时钟频率的12分频。
2.设置T2的重装载值:a.设置T2的重装载值寄存器(RCAP2L、RCAP2H),用于设置定时器2的初始值。
b.重载值=(2^13-待测PWM周期)/预分频系数例如,预分频系数为12,则重载值=(8192-待测PWM周期)/123.设置比较值:a.设置T2的比较值,用于控制PWM占空比。
b.比较值=(重装载值*PWM占空比)/1004.启动T2定时器:将T2控制位寄存器(T2CON)中的TR2位设置为1,启动T2定时器。
5.编写中断服务子程序:a.T2溢出中断:当T2定时器溢出时(即T2TF位被置为1),执行中断服务子程序,重装载T2的初始值。
b.T2比较中断:当T2的计数值与比较值相等时(即T2CF位被置为1),执行中断服务子程序,控制输出PWM的电平。
6.设置IO口通道:配置需要输出PWM的IO口为输出模式。
7.设置主程序:a.在主程序中设置待测PWM周期和占空比的值。
b.在一个无限循环中,不断更新T2的重装载值和比较值。
以上就是STC单片机PWM的基本实现方法。
下面提供一个简单的代码示例:```c#include <reg52.h>sbit PWM_OUT = P1^0; // 设置PWM输出口void PWM_IniTMOD&=0xF0;//设置T0、T1、T3为工作模式0TMOD,=0x01;TH0=0xFF;//设置T0重装载值TL0=0xFF;ET0=1;//打开T0中断EA=1;//打开总中断TR0=1;//启动T0定时器void T0_ISR( interrupt 1static unsigned int count = 0;count++;if (count < duty_cycle) { // 判断当前计数值是否小于占空比,是则输出高电平PWM_OUT=1;} else { // 否则输出低电平PWM_OUT=0;}if (count == period) { // 当计数值等于PWM周期时,将计数值复位为0count = 0;}void maiPWM_Init(;while (1)period = 100; // 设置PWM周期为100duty_cycle = 50; // 设置占空比为50%//...}```这是一个基于定时器0(T0)的简单PWM实现。
长安轿车新诊断仪显示数据定义说明

故障诊断仪显示数据定义说明:发动机故障诊断仪数据定义包含在故障诊断仪上可用的所有发动机相关参数的简要说明。
发动机转速(RPM):故障诊断仪显示0~2400 转/秒——发动机转速由发动机控制模块通过曲轴位置传感器输入计算而得。
在怠速时,应与相应的目标怠速值一致。
发动机设定怠速(RPM):故障诊断仪显示0~3000 转/分——表示发动机控制模块指令的怠速转速。
ECU基于发动机冷却液温度补偿各种发动机负载,以便将发动机保持在理想的怠速转速。
怠速马达位置:故障诊断仪显示0~255 计数值——它显示计数中怠速空气控制(IAC)枢轴的指令位置。
计数大表示指令通过怠速空气通道的空气量增加。
怠速空气控制位置应能非常快速地随发动机负载改变以保持理想的怠速转速。
发动机冷却液温度传感器(℃):故障诊断仪显示-40~151℃――发动机冷却液温度(ECT)传感器安装在冷却液流内,发动机控制模块向发动机冷却液温度(ECT)传感器电路提供 5 伏电压。
该传感器是一个热敏电阻,其内部电阻可随温度变化。
当传感器处于冷态时(内部电阻大),发动机控制模块检测到高电压信号并将其译码为发动机冷态。
当传感器加热后(内部电阻减小),电压信号降低发动机控制模块将较低电压解释为发动机已为热态。
进气温度传感器(℃):故障诊断仪显示-40~151℃——发动机控制模块将进气温度(IAT)传感器的电阻转变为度数。
发动机控制模块运用进气温度传感器根据进气密度调整燃油传输和点火正时。
进气温度也与起动时的ECT 进行比较以识别加热氧传感器加热器和蒸发排放诊断的冷起动。
环境温度(℃):故障诊断仪显示-40~151℃——它表示汽车起动时的进气温度(IAT)。
通过用加热氧传感器诊断来确定上次起动是否为冷起动。
发动机负载(%):故障诊断仪0~100% ——发动机负载是由发动机控制模块通过发动机转速和(MAP)传感器读数计算的。
发动机负载必须随转速和气流的增加而增加。
浙江工业大学(电磁)-飞狐二队技术报告

1.3 技术报告框架安排
3.1 前轮参数调整 ................................................................................................5 3.2 后轮差速机构调整 ........................................................................................7 3.3 编码器的安装 ................................................................................................7 3.4 舵机的安装 ....................................................................................................8 3.5 传感器的安装 ................................................................................................8 3.6 主控板的安装 ................................................................................................9 第四章 硬件系统设计 11
参赛队员签名: 参赛队员签名: 参赛队员签名: 带队教师签名: 日 期:
目 录
第一章 引 言 1
1.1 智能车比赛概述 ............................................................................................1 1.2 从相关文献学习到参加比赛的历程 ............................................................1 1.3 技术报告框架安排 ........................................................................................1 第二章 系统整体方案设计 3
mc9s12系列单片机学习总结
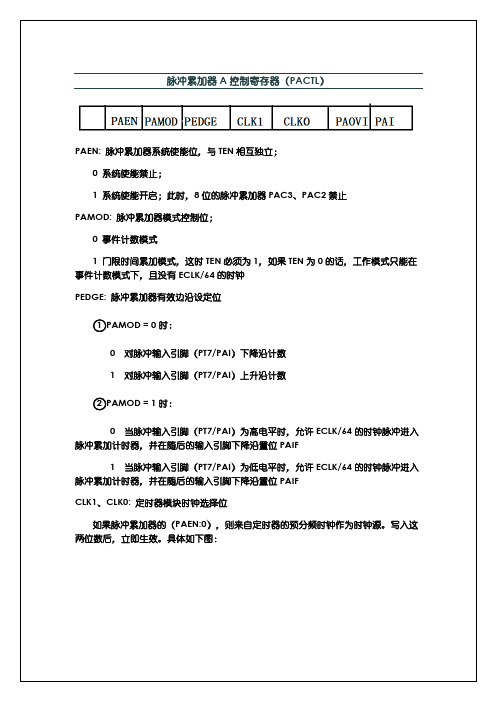
控制寄存器( 脉冲累加器 A 控制寄存器(PACTL) )PAEN: 脉冲累加器系统使能位,与 TEN 相互独立; 脉冲累加器系统使能位, 相互独立; 0 系统使能禁止; 系统使能禁止; 1 系统使能开启;此时,8 位的脉冲累加器 PAC3、PAC2 禁止 系统使能开启;此时, 、 PAMOD: 脉冲累加器模式控制位; 脉冲累加器模式控制位; 0 事件计数模式 1 门限时间累加模式,这时 TEN 必须为 1,如果 TEN 为 0 的话,工作模式只能在 门限时间累加模式, 的话, , 事件计数模式下, 事件计数模式下,且没有 ECLK/64 的时钟 PEDGE: 脉冲累加器有效边沿设定位 1 ○PAMOD = 0 时: 0 对脉冲输入引脚(PT7/PAI)下降沿计数 对脉冲输入引脚( ) 1 对脉冲输入引脚(PT7/PAI)上升沿计数 对脉冲输入引脚( ) 2 ○PAMOD = 1 时: 0 当脉冲输入引脚(PT7/PAI)为高电平时,允许 ECLK/64 的时钟脉冲进入 当脉冲输入引脚( )为高电平时, 脉冲累加计时器, 脉冲累加计时器,并在随后的输入引脚下降沿置位 PAIF 1 当脉冲输入引脚(PT7/PAI)为低电平时,允许 ECLK/64 的时钟脉冲进入 当脉冲输入引脚( )为低电平时, 脉冲累加计时器, 脉冲累加计时器,并在随后的输入引脚下降沿置位 PAIF CLK1、CLK0: 定时器模块时钟选择位 、 如果脉冲累加器的( ),则来自定时器的预分频时钟作为时钟源。
如果脉冲累加器的(PAEN:0),则来自定时器的预分频时钟作为时钟源。
写入这 ),则来自定时器的预分频时钟作为时钟源 两位数后,立即生效。
具体如下图: 两位数后,立即生效。
具体如下图:PAVOI: 脉冲累加器溢出中断允许位 0 禁止 1 PAVOF 置位时申请中断 PAI : 脉冲累加器输入中断允许位 0 禁止 1 PAIF 置位时申请中断计时器系统控制寄存器( 计时器系统控制寄存器(TSCR2) )TOI: 计时器溢出中断使能 0 中断被禁止 1 当 TOF 标志被置位时发出硬件中断请求 TCRE: 始终计数器复位使能0 计数器复位禁止,计数器自由计数 计数器复位禁止, 1 通道 7 成功输出比较后 计数器将被复位 PR0、PR1、PR2: 计数器预分频选择 、 、 新设定的分频因子不会立即起作用, 新设定的分频因子不会立即起作用, 直到下一个触发沿来到那里所有分配计数器均 为零。
PWM模块介绍范文

PWM模块介绍范文PWM(Pulse Width Modulation)是一种通过调整信号脉冲的宽度来控制输出电平的技术。
PWM模块是一种集成电路或微控制器上的模块,用于生成PWM信号。
PWM信号常用于控制电机速度、调节LED亮度、音频处理和通信协议等应用中。
本文将详细介绍PWM模块的工作原理、应用以及一些实际案例。
一、PWM模块的工作原理PWM模块的工作原理基于脉冲宽度调制技术。
其基本思想是通过控制信号脉冲的持续时间和频率来产生一种模拟信号,即PWM信号。
PWM信号的特点是脉冲的占空比可以改变,占空比是指脉冲高电平时间与总周期时间的比值。
1.计数器:用于生成一个可编程的计数周期,控制PWM信号的频率。
2.比较器:用于比较计数器的计数值和设定值,产生PWM信号的高电平和低电平。
3.控制寄存器:用于设置PWM模块的工作模式、计数周期和占空比等参数。
4.输出引脚:用于输出经过比较器处理后的PWM信号。
1.配置控制寄存器:设置PWM模块的工作模式、计数周期和占空比等参数。
2.启动计数器:开始计数,产生计数值。
3.比较器比较:将计数值与设定值进行比较。
4.输出PWM信号:根据比较结果,输出PWM信号的高电平和低电平。
二、PWM模块的应用1.电机控制:PWM信号可以通过调节占空比来控制电机的转速。
通过改变PWM信号的占空比,可以控制电机的功率输出和运动速度。
2.LED亮度调节:PWM信号可以调节LED的亮度。
通过改变PWM信号的占空比,可以控制LED的发光强度,实现亮度调节。
3.音频处理:PWM信号可以用于音频数字模拟转换。
通过PWM信号的高低电平和占空比,可以在数字和模拟信号之间进行转换,实现音频信号的处理和传输。
4.通信协议:PWM信号可以用于数字通信中的编码和调制。
通过改变PWM信号的占空比和频率,可以实现数字信息的编码和调制,用于通信数据传输。
三、PWM模块的实际案例以下是一些实际应用中使用PWM模块的案例。
基于CCD的智能车制作与调试系统设计
基于CCD的智能车制作与调试系统设计摘要:以“飞思卡尔杯”全国大学生智能汽车比赛为背景,基于S12微处理器设计了一个能自主识别规定路径的智能车。
通过软硬件的改进使智能车速度及稳定性有了较大的提高,并遵守大赛的各项规则。
1)采用新型16位“飞思卡尔”单片机MC9S12XS12,处理速度更快,性能更稳定;增强型捕捉定时器(ECT)模块提高了摄像头采集效果及系统的可靠性。
2)采用速度介入算法对舵机进行控制,克服了去年“弦切法”的不足,使得智能车行驶更稳定、快速。
3)采用BB_control控制算法提高了电机的响应速度,能满足小车在较高速度下的快速响应要求。
4)基于SD卡设计了智能车调试系统,能够对智能车行驶过程中的路径图像进行存储,并能通过上位机进行路径信息分析,方便了智能车调试。
通过对智能车设计方法的改进,在稳定性及快速性上有了很大提高,设计的SD卡调试系统有较好的应用价值。
关键词:CCD摄像头;智能车;SPI;MC9S12XS128;LM1881Abstract:This design with "freescale cup" national University Smart Car Competition as the background, S12 smart car microprocessor design provides a path to self-identify the smart car last year. Smart cars to be able to finish the course in the shortest time, and to comply with the rules of competition.1) Using the new 16, "freescale" SCM MC9S12XS12, processing speed faster, more stable performance. Enhanced capture timer (ECT) module improves the effect of camera acquisition and reliability of system.2) Intervention by the speed servo control algorithm to overcome last year's "tangential law" insufficient to make intelligent vehicles driving more stable and fast.3) Use BB_control control algorithm to improve the response of motor speed to meet the car at high speeds, rapid response requirements.4) SD card based on the design of intelligent vehicle system debugging, intelligent vehicles can travel the path of the process of image storage, and the path through the host computer information analysis, to facilitate debugging of smart cars.Based on the improvements of smart car design, the system have great increases both in stability and rapid. And the design of the SD card debug system has good application value.Keywords:CCD camera; Smart Car; SPI; MC9S12XS128; LM18811引言1.1设计背景本设计本文以“飞思卡尔”杯全国大学生智能汽车比赛为背景,制作一个在专门设计的跑道上能自主识别道路行驶的智能车,能在最短的时间里跑完跑道,且不脱离轨道。
新能源汽车电机与驱动系统教案系列项目三 任务3 驱动电机与控制器冷却系统检修

项目三驱动电机任务三驱动电机与控制器冷却系统检修上课时间:年月日课程名称新能源汽车动力电池与驱动电机课时2课型班级教学目标知识目标能够描述驱动电机与控制器冷却系统的作用能够描述驱动电机的散热类型能够描述常见新能源车型驱动电机与控制器冷却系统的结构原理能力目标能进行驱动电机与控制器冷却系统电动水泵的更换情感目标教材分析重点驱动电机与控制器冷却系统的类型驱动电机与控制器冷却系统的结构原理驱动电机与控制器冷却系统电动水泵的更换难点驱动电机与控制器冷却系统的结构原理驱动电机与控制器冷却系统电动水泵的更换方法理论与实操教学法教具荣威E50整车教学过程设计基本要素1.导课设计 2.教学活动策划 3.时间分配4.教学内容5.课后作业6.教学反思— 1—导课:纯电动汽车采用电机来驱动车辆,电机高速运转时一定会产生热量,需要进行冷却吗?作为新能源汽车的售后服务人员,你能否回答这些问题?如果电机的冷却系统出现故障,你能进行检修吗?理论教学内容:1.驱动电机与控制器冷却系统的作用电机(也称电动机)作为电动汽车驱动可实现极低排放或零排放。
电动汽车在驱动与回收能量的工作过程中,电机定子铁芯、定子绕组在运动过程中都会产生损耗,这些损耗以热量的形式向外发散,需要有效的冷却介质及冷却方式来带走热量,保证电机在一个稳定的冷热循环平衡的通风系统中安全可靠运行。
电机冷却系统设计的好坏将直接影响电机的安全运行和使用寿命。
图3-3-1所示是新能源汽车的驱动电机。
电动汽车驱动电机与控制器的冷却系统主要依靠冷却水泵带动冷却液在冷却管道中循环流动,通过在散热器的热交换等物理过程,冷却液带走电机与控制器产生的热量。
为使散热器热量散发更充分,通常还在散热器后方设置风扇,如图3-3-2、图3-3-3所示。
图3-3-1 新能源汽车驱动电机— 2—图3-3-2 驱动电机与控制器冷却系统主要构成图3-3-3电机与控制器冷却系统主要构成2.驱动电机的散热类型电机在进行能量转换时,总是有一小部分损耗转变成热量,它必须通过电机外壳利周围介质不断将热量散发出去,这个散发热量的过程,我们就称为冷却。
史上最全的西门子脉冲方式汇总

史上最全的西门子脉冲方式汇总
基本指令部分:
脉冲输出指令(PLS)用于在高速输出(Q0.0和Q0.1)上控制脉冲串输出(PTO)和脉宽调制(PWM)功能。
1、 PWM波
PWM产生一个占空比变化周期固定的脉冲输出。
可以以微秒或者毫秒为单位指定其周期和脉冲宽度:
周期:10 µs到65,535 µs 或2ms到65,535 ms
脉宽时间: 0 µs到65,535µs 或0ms到65,535 ms
注:脉宽≥周期值占空比是100%:连续接通输出。
脉宽=0 占空比是0%:连续关闭输出。
周期振动。
由于这个原因,建议采用PWM同步更新。
选择一个适合于所有周期时间的时间基准。
1.2特点:周期和脉宽都是以时间为单位特别是脉宽不是固定的 0-255 或者0-512
2、脉冲串操作(PTO)
TO按照给定的脉冲个数和周期输出一串方波(占空比50%)。
PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲波形)。
可以指定脉冲数和周期(以微秒或毫秒为增加量):
脉冲数目: 1到4,294,967,295
周期:10 µs到65,535 µs或2ms到65,535 ms。
周期寄存器。
一旦启动了起始PTO段,就必须按照第二个信号波形的要求改变特殊寄存器,并再次执行PLS指令。
第二个脉冲串的属性在管道中一直保持到第一个脉冲串发送完成。
在管道中一次只能存储一段脉冲串的属性。
当第一个脉冲串发送完成时,接着输出第。
光电组方案设计
第九届飞思卡尔智能车东秦光电组设计方案:组内成员:5111010 翟成(软件)5110904 郭波(硬件)5111503 李伟鹏(硬件)前言:看过本届竞赛规则之后,我们感觉,对于光电组,这次竞赛和之前八次有了一些变化。
在此之前的八届,可以说是完全靠比拼速度,然而到目前而言,速度似乎已经达到了一个瓶颈,想要再在速度上有很大的提高并非易事。
所以,相对而言,我们觉得与其再单纯的花大力气去提高校车速度,倒不如尝试多花一些精力在技巧上的提高。
速度虽然依然是重中之重,但可以考虑在提高小车稳定性的基础上适当的降低速度。
比如今年新增的人字掉头:要么直接当成弯道将CCD摇头,但是要转一个60度的弯对于B车模难度很大,B车模的转角不如A车,处理不好就要出赛道。
第二:反着跑,但是去年的摄像头证明了反着跑存在转向延迟,处理不好的话,速度也会上不去。
所以在这点上,应该花些时间反复测试,单单从理论上是无法知道谁优谁劣的。
整体结构:智能汽车系统采用飞思卡尔的32位微控制器K60单片机作为核心控制单元用于智能汽车系统的控制。
在选定智能汽车系统采用光电传感器方案后,赛车的位置信号由车体前方的光电传感器采集,经K60的I/O口接收后,用于赛车的运动控制决策,同时内部ECT模块发出PWM波,驱动直流电机对智能汽车进行加速和减速控制,以及伺服舵机对赛车进行转向控制,使赛车在赛道上能够自主巡线行驶,并以最短的时间最快的速度跑完全程。
为了对赛车的速度进行精确的控制,在智能汽车电机输出轴上安装光电编码器,采集编码器转动时的脉冲信号,经MCU捕获后定时进行PID自动控制,完成智能汽车速度的闭环控制。
此外,还增加了键盘作为输入输出设备,用于智能汽车的速度和控制策略选择。
根据以上系统方案设计,赛车共包括六大模块:K60主控模块、传感器模块、电源模块、电机驱动模块、速度检测模块和辅助调试模块。
各模块的作用如下:(1) K60主控模块:核心控制模块,将采集光电传感器、光电编码器等传感器的信号,根据控制算法做出控制决策,驱动直流电机和伺服电机完成对智能汽车的控制。
LCR技术报告
牛记朋
徐天昊
带队教师签名:田雨
日期:8月11日
1.1 大赛介绍
全国大学生智能汽车竞赛原则上该竞赛由竞赛秘书处为各参赛队提供/购置规定范围内的标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,保证竞赛向健康、普及,持续的方向发展。
图3.1.1主板电路
3.2 传感器模块
线性CCD是光电组小车最重要的模块之一,能够分辨白色的赛道及黑色的边线,对道路状况的检测起着至关重要的作用。
TSL1401线性CCD传感器包含128个线性排列的光电二极管。每个光电二极管都有各自的积分电路,以下我们将此电路统称为像素。每个像素所采集的图像灰度值与它所感知的光强和积分时间成正比。
void PWM_Init(void)
{
PWME = 0x00; //输出通道使能位。1可对外输出波形;0不能对外输出波形。设置之前先禁止PWM[ 2 5 6 7]
PWMPOL = 0xff; //通道对外输出波形先是高电平然后再变为低电平
PWMCLK = 0xff; //用clock_A,clock_B
图2.4.2推力轴承
本智能车硬件系统以稳定为设计的原则,在有限的条件下做到最好。单片机采用MC9S12XS128。使用LM2940-5为各个模块供电,电机驱动使用芯片BTS7970。调试过程中,采用OLED、蓝牙等模块辅助,方便小车的调试。本章均有详细介绍。
pwm移相方案

pwm移相方案
PWM(Pulse Width Modulation)移相方案是一种用于控制电子设备的技术。
它通过调节信号的脉冲宽度来控制设备的输出功率。
PWM移相方案的设计可以用于许多应用,包括电机控制、LED灯的亮度调节以及电源管理等。
在PWM移相方案中,每个周期都被分割成若干个等长度的时间片段。
通过控制每个时间片段的脉冲宽度,可以实现对输出信号相位的调节。
通常,这些时间片段被称为“占空比”,表示脉冲信号的高电平时间与周期的比值。
实现PWM移相的一种常见方法是通过使用计数器和比较器。
计数器根据固定的时钟信号进行计数,当计数值达到比较器的值时,脉冲宽度被重置。
通过调整比较器的值,可以实现脉冲信号的移相。
PWM移相方案具有许多优势。
首先,它可以提供高精度的输出信号,允许在不同负载条件下稳定控制设备的功率输出。
其次,移相方案具有良好的实时性能,可以快速响应控制信号的变化。
此外,PWM还能有效地减少功率损耗,并通过改变占空比来调整输出的平均功率。
PWM移相方案在电机控制领域得到了广泛的应用。
通过调节PWM波的移相角度,可以改变电机的转速和输出扭矩,实现精确的速度和位置控制。
此外,在电源管理中,PWM移相方案也用于实现高效率的能量转换和电压调整。
总之,PWM移相方案是一种灵活且可靠的控制技术,广泛应用于各个领域。
它通过调节信号的脉冲宽度和相位来实现精确的控制,提高设备的性能和效率。
在未来的发展中,PWM移相方案有望在更多应用中发挥重要作用,推动科技进步和创新。
ect输入捕捉测占空比

ect输入捕捉测占空比引言电子控制技术(Electronic Control Technology,ECT)已经广泛应用于各个领域,对于测量和控制电力系统中的电流、电压、频率等参数起到了至关重要的作用。
而在实际的电子控制系统中,测量占空比也是一项关键任务,它能够帮助我们了解信号的真实情况,从而进行相应的控制和调整。
本文将对ect输入捕捉测占空比进行全面、详细、完整的探讨。
一、ect输入捕捉技术简介ect输入捕捉技术是一种使用电路或芯片在特定的时间点捕捉输入信号的技术。
通过捕捉输入信号的高电平和低电平时间长度,可以计算得到占空比。
在电子控制系统中,尤其是电力系统中,占空比是指周期信号中高电平时间占总周期时间的比例。
占空比通常用百分比表示,它描述了信号高电平的持续时间与周期的比例关系。
ect输入捕捉技术能够精确地测量占空比,为电子控制系统的精确控制和调整提供了有效的手段。
下面我们将详细介绍ect输入捕捉测占空比的原理、方法和应用。
二、ect输入捕捉测占空比原理ect输入捕捉测占空比的原理是基于计算输入信号的高电平时间和总周期时间的比例。
具体流程如下:1.输入信号的边沿检测:首先,ect系统需要检测输入信号的边沿,包括上升沿和下降沿。
这一步可以通过电路或芯片内部的触发器或计数器实现。
2.边沿时间的捕捉:一旦检测到输入信号的边沿,ect系统会立即捕捉当前的系统时间,记录下此刻的时钟计数值。
3.计算占空比:在一周期内,ect系统会通过相同的方式捕捉输入信号的下一个边沿,并记录下此刻的时钟计数值。
通过计算这两个时钟计数值之间的差值,可以得到高电平持续的时间。
再与总周期时间相除,即可计算得到占空比。
ect输入捕捉测占空比的原理是基于时钟计数值的差值计算,因此在设计这一系统时,需要考虑到时钟的精度与分辨率,以确保测量结果的准确性。
三、ect输入捕捉测占空比方法ect输入捕捉测占空比的方法有多种,下面介绍其中两种常用的方法:1. 硬件实现方式硬件实现方式是通过电路来实现ect输入捕捉测占空比。
ntc热电偶信号转pwm,温度信号控制模块

ntc热电偶信号转pwm,温度信号控制模块NTC热电偶信号转PWM,温度信号控制模块热电偶是一种能够测量温度的传感器,常用于工业自动化和温度控制系统中。
然而,热电偶输出的信号是一个变化的电压,需要转换成可用于控制的数字信号。
而NTC(Negative Temperature Coefficient)热敏电阻是一种温度敏感的电阻器,可以用来转换温度变化为电阻变化,进而转换成数字信号。
为了实现NTC热电偶信号转换为PWM(Pulse Width Modulation)信号的目的,我们可以使用一个温度信号控制模块。
这个模块需要实现以下功能:1. 信号接收:首先,模块需要接收从NTC热敏电阻和热电偶传感器发送的温度信号。
这些信号可以是模拟信号,需要经过模数转换器(ADC)进行数字化处理。
2. 温度转换:接下来,模块需要将温度信号从数字形式转换为PWM信号。
这个转换过程可以通过使用微控制器或数字信号处理器来实现。
通过对温度信号的数值进行计算和处理,可以将其转换为相应的PWM信号。
3. PWM输出:转换完成后,模块将生成PWM信号。
PWM信号是一种通过控制脉冲的宽度来控制输出的信号。
它可以被用于控制电机、灯光、风扇等各种设备。
通过调整PWM信号的占空比(脉冲高电平时间与周期的比值),可以实现对设备的不同控制。
通过将NTC热电偶信号转换为PWM信号,我们可以实现对温度的精确控制。
例如,当温度超过一定阈值时,PWM信号可以触发风扇转速的增加,以降低温度。
当温度下降到另一个阈值时,PWM信号可以减少风扇转速,确保系统保持在适宜的温度范围内。
总之,NTC热电偶信号转PWM的温度信号控制模块具有重要的应用意义。
它可以将温度传感器输出的信号转换为数字信号,并通过PWM 信号实现对温度的控制。
这些控制功能可以被广泛应用于各种自动化系统和设备中,提升温度控制的准确性和稳定性。
互补pwm语音输出ic工作原理

互补pwm语音输出ic工作原理小伙伴们!今天咱们来唠唠这个超有趣的互补PWM语音输出IC的工作原理呀。
咱先来说说啥是PWM,PWM呢,就是脉冲宽度调制。
你可以把它想象成一个超级灵活的小厨师,这个小厨师不是在做菜的时候一股脑儿地把调料都倒进去,而是很有技巧地控制调料放进去的时间长短。
PWM就是这样,它通过控制脉冲的宽度来表示不同的信息。
就像是小厨师通过控制放调料的时长来调出不同口味的菜一样俏皮呢。
那互补PWM又是什么特别的存在呢?互补PWM就像是一对配合超级默契的小伙伴。
在电路里呀,它有两个信号,这两个信号就像两个小伙伴手拉手。
一个信号在高电平的时候,另一个信号就会在低电平,它们相互补充,就像你和你的好朋友,你擅长的地方他可能不擅长,他擅长的地方你可能不擅长,但是你们俩凑在一起就特别完美。
现在咱们再深入一点,聊聊这个互补PWM语音输出IC。
这个IC呀,就像是一个小小的魔法盒。
当有语音信号要从这里输出的时候,它就开始施展魔法啦。
它首先会把这个语音信号进行处理,这个处理过程就像是把一堆乱七八糟的音符整理成美妙的旋律一样。
它会把语音信号按照一定的规则转化成PWM信号。
这个规则就像是乐谱一样,告诉这个魔法盒怎么把语音变成合适的脉冲宽度调制信号。
这个IC里面有好多小电路元件在忙碌地工作着。
就像一群小蚂蚁在齐心协力地搬运东西一样。
里面的晶体管呀,就像是一个个小士兵,它们按照指令,在合适的时候打开或者关闭电流的通道。
当要输出高电平的时候,对应的晶体管就会像小士兵打开城门一样,让电流顺利通过;当要输出低电平的时候,晶体管就像小士兵关上城门,阻止电流通过。
在语音输出的过程中,互补PWM信号的高低电平不断地变化。
这种变化就像是在跳舞一样。
高电平跳一下,低电平接着跳一下,它们交替着,就像两个人在跳一种很有节奏感的舞蹈。
而这种不断变化的信号就能够驱动后面的扬声器之类的设备,让它们把语音播放出来。
你看,这个互补PWM语音输出IC是不是超级神奇呀?它就像是一个小小的音乐指挥家,指挥着各种电子元件,把语音信号变成我们能听到的声音。
技能培训资料:汽车常用的英文缩写含义
A/C空调ECT发动机冷却液温度ACL空气滤清器ECM发动机控制模块ACT进气温度EEROM电可擦可编程序只读存储器AFS空气流量计EGR废气再循环AIS二次空气喷射EVP废气再循环阀位置AMl空气温度控制一EPC电子压力控制AM2空气温度控制二EPROM可删除可编程序只读存贮器A/T自动变速器EVAP燃油蒸气排放ATDC在上止点后EVR废气再循环真空调节器BTDC在上止点前FPM燃油泵组件CANP净化炭罐FPRC燃油压力调节器控制CAT催化转换器FR油管节流阀CCA中央控制组件H02S加热型氧传感器CCO变矩器离合器超速传动电磁阀CKP曲轴位置IAC怠速空气控制CMFI中央多孔燃油喷射ICM点火控制模块CP凸轮轴位置IDM点火诊断监控器CPP离合器踏板位置ISC怠速控制DLC数据传输插接器KS爆燃传感器DCL数据通信插座锁止电磁阀DTM诊断测试模块1./C锁止离合器1.SD防滑差速器TCC变矩器离合器MAF空气流量传感器TDC上止点MAP进气歧管绝对压力TP节气门位置MCU微机处理控制单元TPS节气门位置传感器MFI多点燃油喷射TSS变速器速度传感器MIL故障指示灯TTS变速器温度开关M/T手动变速器VSS车速传感器PCM动力系控制模块VTEC可变气门正时与升程电子控制PIP点火拾波器WOT空调节气门全开PROM可编程序只读存贮器TAB空气旁通道真空电磁阀PSP动力转向压力TAD空气旁通真空电磁阀PSPS动力转向压力开关TBI节气门燃油喷射PWM脉冲宽度调节SCS检测器接头STO自测试输出SIL档位指示灯STI自测试输入SS换档电磁阀SPI单点喷射。
simulink里pwm generator模块中内部电路

simulink里pwm generator模块中内部电路
Simulink中的PWM Generator模块是一个用于生成PWM(脉宽调制)信号的模块,其内部电路主要包括以下几个部分:
1.电压比较器:用于比较输入信号与锯齿波信号,产生PWM信号。
2.定时器:用于产生锯齿波信号,控制PWM信号的频率和占空比。
3.触发器:用于产生PWM信号的触发信号,控制PWM信号的输出。
4.缓冲器:用于隔离模块的输入和输出,保护模块不受外部信号的影响。
这些部分相互协作,共同实现PWM信号的生成。
具体来说,输入信号与锯齿波信号进行比较,比较结果作为PWM信号的占空比;定时器产生锯齿波信号,控制PWM信号的频率;触发器产生PWM信号的触发信号,控制PWM信号的输出时刻;缓冲器隔离模块的输入和输出,保护模块不受外部信号的影响。
需要注意的是,具体的内部电路结构可能因不同的PWM Generator模块而有所差异,上述结构仅供参考。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
TEN
TCNT
Address Offset $0004, 05
B0.......……...B7 B8……..........B15
PIN DATA BUS
脉冲累加器 TSCR1 -定时器控制寄存器
TEN
TSWAI TSFRZ TFFCA
R
0
R
0
R
0
R
0
$0006
RST:
0
0
0
0
R = Reserved
输出比较寄存器
1. TC7 – TC0
16 位捕捉/比较寄存器 (TC7) Address Offset $0010 - $0011 $001E - $001F
16 位捕捉/比较寄存器 (TC0) B7 B6 C6F
0
B5 C5F
0
B4 C4F
0
B3 C3F
0
B2 C2F
0
B1 C1F
0
B0 C0F
RST:
TOI
0
0
0
0
0
0 TCRE PR2 PR1 PR0
0 0 0 0 0
$000D
预分频系数选择
PR2 PR1
0 0 1 1 0 0 1 1
PR0
0 1 0 1 0 1 0 1
除以
1 2 4 8 16 32 64 128
1 – 定时器由OC7比较符合时复位 0 – 定时器自由运行
1 – 定时器溢出中断使能 0 – 定时器中断禁止
ECT 模块结构
• 一个16位向上带可编程
预分频的主计数器.
• 一个16位的带可编程预
分频的模数向下计数器 每个通道具备输入捕捉 和输出比较功能 可设置成2个16位脉冲 累加器. 实现不同的功能
• 8个独立的定时器通道,
• 4个8位脉冲累加器,也 • 通过对寄存器编程可以
Slide 3
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
输出比较功能
• 在特定的时刻输出一个信号
TCNT
16位自由运行计数器 当比较寄存器的值和计数 器的值相等时,采取行动 比如:当TCNT=0x5678 相等 置位
清零
OR Pin
OCx
翻转
OR
比较
比较器
引脚控制逻辑
TOCx
16位输出比较寄存器 比如:0x5678 软件可以修改
OCxF 状态标志位置位,
定时器编程步骤
用途: 产生周期中断 • 初始化
1. 设定预分频系数 2. 定时器溢出中断使能 3. 定时器使能 1. 清标志位 2. 用户自己的代码
• 中断函数
void ECT_Init(void) { TSCR2_PR = 7; //prescale factor is 8, bus clock/128=8Mhz/8 TSCR2_TOI = 1; //timer overflow interrupt enable TSCR1_TEN = 1; //timer enable } #pragma CODE_SEG NON_BANKED #pragma TRAP_PROC void Int_TimerOverFlow(void) { TFLG2_TOF = 1; //clear timer overflow flag //用户自己的代码 ……………. } #pragma CODE_SEG DEFAULT
OMX 0 0 1 1 OLX 0 1 0 1 Action on OCx No Action OCx Toggle OCx Drive OCx LO Drive OCx HI
B7 4. TCTL1
RST:
B6 OL7
0
B5 OM6
0
B4 OL6
0
B3 OM5
0
B2 OL5
0
B1 OM4
0
B0 OL4
0
OM7
0
$0008
5. TCTL2
RST: 0
B7 OM3
0
B6 OL3
0
B5 OM2
0
B4 OL2
0
B3 OM1
0
B2 OL1
0
B1 OM0
0
B0 OL0
$0009
B7 6. CFORC
RST:
B6
B5
B4 FOC4
0
B3 FOC3
0
B2 FOC2
0
B1 FOC1
0
B0
0
FOC7 FOC6 FOC5 FOC0 0 0 0
定时器,预分频,计数器
寄存器:
1. TCNT
RST: 0........................................................................................................................0 B7......................................................................B0 $000F
16 位自由运行/模计数器
B15.......................................................................................................................... ..…B0 Address Offset $0004, $0005
目录
• Enhanced Capture Timer Module (ECT)
增强型捕捉定时器模块
• PULSE WIDTH MODULATION (PWM)
脉宽调制模块
Slide 1
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
Freescale
HCS12 微控制器 MC9S12DP256
2005年8月
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
Enhanced Capture Timer Module 增强型捕捉定时器模块
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
0
2. TFLG1
C7F
0
$000E
ห้องสมุดไป่ตู้
RST:
比较/捕捉标志位 写 ‘1’清除中断状态标志位
B7 3. TIE C7F
RST: 0
B6 C6F
0
B5 C5F
0
B4 C4F
0
B3 C3F
0
B2 C2F
0
B1 C1F
0
B0 C0F
0
$000C
比较/捕捉屏蔽位 0 = 屏蔽中断请求 1 = 中断请求允许
输出模式和输出电平 (O7–OC0)
2. TFLG2
RST:
TOF
0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
标志寄存器
定时器溢出标志位,写 ‘1’ 清零
B7....................................................................................B0
3. TSCR2
当比较发生时(值相等时)
中断屏蔽 (通过软件使能)
OCxI
中断请求
• 共有8个输出比较通道 • 每个通道有自己的向量表和控制寄存器
Slide 7