开题报告线结构光扫描测量系统设计-丁连迪
基于交比不变的线结构光标定方法研究

基于交比不变的线结构光标定方法研究1. 引言1.1 研究背景线结构光标定方法是计算机视觉领域中的重要研究内容,它在工业测量、医疗影像、三维重建等领域有着广泛的应用。
传统的线结构光定标方法往往需要复杂的标定板或者复杂的计算过程,使得其应用受到了一定的限制。
基于交比不变的线结构光标定方法应运而生。
随着计算机技术的不断发展和进步,基于交比不变的线结构光标定方法成为了近年来的研究热点。
该方法利用交比不变性质,从而简化了光标定的过程,提高了精度和稳定性。
这种方法不仅可以提高光标定的效率,还可以减少设备成本和提高测量精度,具有广阔的应用前景。
在实际应用中,仍然存在一些问题需要解决,比如光照条件不稳定、噪声干扰等,这也是我们研究工作的动力所在。
本研究旨在通过对基于交比不变的线结构光标定方法进行深入研究,探索其在不同场景下的适用性和稳定性,为相关领域的研究和应用提供有力的支持。
1.2 研究意义线结构光是一种常用于三维测量和视觉定位的技术,其精确的标定方法对于提高测量的准确性和稳定性具有重要意义。
基于交比不变的线结构光标定方法是一种新颖且有效的标定方法,能够克服传统方法中存在的一些缺陷,提高标定的精度和稳定性。
研究意义在于探讨基于交比不变的线结构光标定方法的可行性和有效性,为进一步推动线结构光在三维测量中的应用提供理论支持和实验验证。
通过研究这一方法,可以不仅提高线结构光的标定精度,还能够简化标定过程,降低标定成本。
此外,基于交比不变的线结构光标定方法还具有更强的抗噪声能力和更高的鲁棒性,能够适用于更加复杂的环境和场景。
因此,深入研究基于交比不变的线结构光标定方法具有重要的理论和实际意义,将为线结构光技术的发展和应用提供新的思路和途径。
本文旨在探讨这一方法的原理和应用,为相关研究和实践提供参考和借鉴。
1.3 研究目的研究目的是为了解决传统线结构光标定方法在复杂环境下易受外界干扰影响,导致精度不稳定的问题。
通过基于交比不变原理的线结构光标定方法,旨在提高光标定的精准度和稳定性,实现在复杂环境下的准确定位和姿态估计。
1、成果名称便携式无导轨结构光三维扫描测量系统

1便携式无导轨结构光三维扫描测量系统该成果实现了基于BCCSL方法和SFMS方法的三维测量系统硬件设计,数控光学机械装置的标定方法和三维检测结合的设计。
可以应用到工业企业的三维检测系统的硬件、软件设计,并且已经销售到多家摩托车和汽车行业。
应用在三维检测领域,还可以应用于工业CT图像重建、织物疵点检测、在线工业品质量检测、模拟手术系统、航空、航天领域中等多种视觉检测领域,实现在线三维重建、在线三维检测。
便携式无导轨结构光三维扫描测量系统涉及软件及硬件的开发、设计与实现,资金需求约为50万人民币;场地规模使用面积约100平方米,保证光线良好,最好没有振动源;操作人员一位。
2细胞培养用糖化温敏凝胶本成果采用自由基聚合法,将生物相容性良好的多糖引入传统聚异丙基丙烯酰胺(PNIPAAm)温敏凝胶,所得糖化凝胶温度响应范围为20℃~40℃。
利用其温度响应性,可实现细胞脱附智能化,避免了传统酶解法对细胞功能造成的损伤。
本项目制备的糖化温敏凝胶将在组织工程支架材料领域存在广阔的应用前景。
组织工程技术克服了“以创伤修复创伤”,从根本上解决组织、器官缺损的修复和功能重建等问题,它从移植器官到制造组织器官,标志着复制再生组织与器官时代的来临,为再生医学的崛起开辟了崭新的道路。
投资一条生产线大约需25万元人民币,约需80m2的场地,一个班大约需3名工人。
该糖化温敏凝胶的附加值将比传统的PNIPAAm温敏凝胶高50%左右,用于细胞培养可节约各种成本50%。
3点石成晶:划时代新材料火成岩占地壳岩石的95%,其熔制的水晶比重为钢铁的1/3, 理论强度是普通钢铁150MPa的100倍、重防腐、耐高温低温、绝热、绝缘、耐磨、红外隐形、雷达隐形、声纳隐形、无污染,国标允许在水泥中添加量为50%。
火成岩水晶系列材料包括铸件、鳞片、短纤、长丝、粉体、复合材料6大类。
鳞片:玻璃鳞片涂料是最佳重防腐涂料,但鳞片生产技术中国无一授权专利。
国外对军用涂料实施禁运和技术封锁。
结构光三维测量系统建模与标定技术的研究的开题报告
结构光三维测量系统建模与标定技术的研究的开题报告一、选题背景随着3D打印、工业制造、计算机视觉等技术的快速发展,3D测量技术也变得越来越重要。
而结构光三维测量技术是一种非接触式、高精度的3D测量方法,已广泛应用于工业制造、精密加工、医疗、文化遗产保护等领域。
在结构光三维测量系统中,建模和标定是关键技术之一。
建模技术用于提取物体表面的三维几何形状信息,标定技术则用于校正系统误差,提高测量精度。
因此,研究结构光三维测量系统建模和标定技术,对于提高结构光三维测量技术的精度和可靠性具有重要意义。
二、研究目的与意义本研究旨在探索结构光三维测量系统建模与标定技术,具体包括以下几个方面:1.研究结构光三维测量系统的工作原理和测量误差来源,建立系统误差模型,定量分析误差来源。
2.针对系统误差,研究建模技术,提出细分光栅、拟合曲面等方法,对物体进行三维重建和表面拟合。
3.研究标定技术,提出基于多个平面标定板的标定方法,实现系统的精确校准,并对系统进行误差分析和校正。
通过上述工作,可实现结构光三维测量系统的精确测量,提高测量精度和可靠性,为工业制造、精密加工、医疗、文化遗产保护等领域提供有效的技术支持。
三、拟解决的问题1.当前结构光三维测量技术存在精度不高、测量误差较大等问题,不能满足高精度测量的需求。
2.目前结构光三维测量系统建模和标定技术不够完善,需要进一步深化研究。
3.缺乏有效的标定方法,导致系统误差无法得到有效减小。
四、研究内容与方法1.系统分析结构光三维测量系统的工作原理和测量误差来源,建立系统误差模型。
2.针对系统误差,研究建模技术,提出细分光栅、拟合曲面等方法,对物体进行三维重建和表面拟合。
3.研究标定技术,提出基于多个平面标定板的标定方法,实现系统的精确校准。
4.实验验证研究方法的有效性与可行性。
五、预期成果1.研究结构光三维测量系统建模与标定技术,提出细分光栅、拟合曲面等方法,实现对物体表面的三维几何形状信息的提取和表面拟合。
结构光三维测量系统的建模与标定的开题报告
结构光三维测量系统的建模与标定的开题报告一、研究背景在现实生活中,许多工程、制造和设计任务需要对物体的形状、位置、大小等几何特征进行精确的测量和分析,如汽车零件的生产、建筑物的设计和制造等,这就需要使用高精度的三维测量系统来完成。
而结构光三维测量系统是一种常用的三维测量方法,具有测量速度快、精度高和非接触式等优点,在生产和研发领域得到广泛的应用。
然而,结构光三维测量系统的精度和稳定性受到许多因素的影响,例如环境光的变化、相机和投影仪的参数差异等,因此需要进行系统建模和标定,以提高测量精度和可靠性。
二、研究内容本研究主要涉及结构光三维测量系统的建模和标定。
在系统建模方面,将从物体的表面反射光线的物理过程出发,建立起三维物体与相机、投影仪等设备之间的数学模型,以实现三维物体的抓取和重建。
在标定方面,将利用标定板和相机测量获得结构光系统的内部和外部参数,并通过自校正算法计算出各相机和投影仪的误差,进一步提高系统的测量精度和可靠性。
三、研究方法本研究将采用以下方法实现系统建模和标定:1.理论研究:深入了解结构光三维测量系统的物理机制和相关数学理论,如相机模型、三维重建算法等。
2.实验测试:通过实际测量和数据采集获取结构光系统的输入数据,并进行相应的数据处理和分析。
3.模型拟合:基于输入数据,建立模型并进行优化拟合,以提高模型的准确性和可靠性。
4.算法实现:基于建立的模型和优化的参数,设计和实现相应的算法,并进行算法测试和验证。
四、研究意义和目标本研究的主要目标是实现结构光三维测量系统的建模和标定,以提高系统的测量精度和可靠性,为工程和研发领域提供高效、精准的三维测量方法。
其意义在于:1.提高生产和研发效率,减少测量误差、提高产品质量和安全性。
2.促进结构光三维测量技术的发展和应用,推动工业制造和设计的数字化和智能化。
3.为三维视觉和图像处理领域提供新的理论和实践研究的思路和方法。
五、研究进度安排1.文献综述和理论研究(1个月)2.系统模型和参数优化拟合(2个月)3.标定实验和数据处理(2个月)4.算法设计和实现(2个月)5.算法测试和评估(1个月)6.论文撰写和提交(1个月)六、论文结构安排1.引言2.理论基础和研究背景3.结构光三维测量系统的建模4.结构光三维测量系统的标定5.算法设计和实现6.系统测试和评估7.结论和展望参考文献。
基于线结构光扫描的脚型重构测量研究的开题报告
基于线结构光扫描的脚型重构测量研究的开题报告一、选题背景与意义脚型的测量是传统的医学研究领域中的一个重要研究方向。
如今,随着人们对舒适的鞋子和节约医疗成本的需求增加,对脚型测量的要求也越来越高。
传统的方法包括通过手工测量或使用专业设备进行测量。
然而,手工测量容易导致误差,因此需要更可靠和精确的测量方法。
同时,现代三维成像技术已经应用于相关领域,从而为脚型测量提供了新的机会。
线结构光扫描作为三维成像技术的一种,可以通过使用标准摄像机和激光投影器来创建三维物体的精确模型。
在脚型测量方面,该技术可以提供比传统方法更高的准确性和可重复性。
因此,基于线结构光扫描的脚型重构测量研究是一项有意义和有创意的项目。
二、研究目的本研究旨在通过开发一种基于线结构光扫描技术的脚型测量系统,通过获取和分析三维数据来测量人的脚型,从而提供更精确和可靠的脚型测量服务。
具体目的包括:1.开发一种基于线结构光扫描技术的脚型测量系统。
2.利用该系统测量人类脚型的三维数据,并对数据进行分析和处理。
3.评估该系统的准确性和精度,并对成果进行验证和调整。
三、研究内容1.文献综述与背景分析,包括脚型的测量方法、线结构光扫描技术原理、脚型测量系统等。
2.研究线结构光扫描技术在脚型测量中的应用,包括采集三维数据和分析处理数据。
3.设计和开发基于线结构光扫描技术的脚型测量系统,包括激光发射机和摄像机。
4.利用测量系统采集人类脚型的三维数据,并对数据进行分析和处理。
5.评估该系统的准确性和精度,并进行验证和调整。
四、预期成果通过基于线结构光扫描技术的脚型测量系统,可以获得人类脚型三维数据,该数据可以在医疗、运动、休闲等领域中应用。
预期的成果包括:1.脚型测量系统的设计和开发。
2.人类脚型三维数据的采集、处理和分析。
3.对该系统的准确性和精度进行评估并进行实验验证。
4.发表相关论文或报告,以及提交系统的技术文档和代码。
五、研究进度安排第一年:1.完成文献综述和规划研究内容2.设计和开发基于线结构光扫描技术的脚型测量系统3.收集脚型测量数据的格式及保存方式,建立数据集第二年:1.采集人类脚型的三维数据2.对数据进行分析和处理3.评估该系统的准确性和精度第三年:1.进行实验验证2.发表论文或报告3.制作系统的技术文档和代码六、预期贡献本研究的结果将有助于提高脚型测量的准确性和精度,尤其是对于运动员、老年人以及脚部有特殊问题的人群而言。
结构光三维测量系统关键技术的研究的开题报告
结构光三维测量系统关键技术的研究的开题报告一、选题背景和意义目前,三维测量技术已广泛应用于工业制造、工程建设、精密制造、艺术保护等领域。
而结构光三维测量系统作为非接触式三维测量技术的一种,具有快速、精度高、无需触碰被测物等优势,已成为当前最为普遍和有效的三维测量技术之一。
结构光三维测量系统由投影系统、成像系统、配准系统、数据处理系统等几大部分组成。
其中,投影系统的关键技术包括光源、光斑形态、光斑移动方向等方面;成像系统的关键技术包括相机像素、通道数、校正等方面;配准系统的关键技术则包括基准面、模板匹配等方面。
这些关键技术的研究和优化,将直接影响到结构光三维测量系统的测量精度和稳定性,从而提高现代制造业和科学技术实践的精度和效率。
因此,本文将对结构光三维测量系统相关的关键技术进行深入研究和探讨,力求为现代制造业和科学技术实践的发展提供一定的理论支持和实践指导。
二、研究内容1.结构光三维测量系统基本原理和结构组成的研究2.结构光三维测量系统的关键技术进行详细研究和探讨(1)投影系统的关键技术研究:包括光源、光线方向、光斑形态等方面的探讨。
(2)成像系统的关键技术研究:包括相机像素、通道数、校正等方面的分析。
(3)配准系统的关键技术研究:包括基准面、模板匹配等方面的研究。
3.基于结构光三维测量系统的测量算法研究(1)基于迭代最近点算法(ICP)的三维点云匹配方法研究;(2)基于变分法的三维网格重建算法研究;(3)基于曲率分析的三维表面拟合方法研究。
三、研究方法和技术路线本课题的研究方法主要采用文献资料调研及实验验证相结合的方式。
调研已有的相关文献资料并理解其中的理论和技术,对结构光三维测量系统的基本原理和关键技术进行分析和综合;同时开展实验验证,比较和分析不同方案的实际测量精度及稳定性。
具体技术路线包括:1.结构光三维测量系统基本原理和结构组成的研究2.结构光投影系统的光源、光斑形态、光斑移动方向等关键技术的研究3.基于CCD相机的成像系统关键技术的研究4.基于机器视觉算法的三维匹配和重建技术研究5.基于提高测量精度和稳定性的方法优化结构光三维测量系统的测量方案6.编写结构光三维测量系统的软件程序并进行实验测试四、预期成果和意义1.深入研究和探讨结构光三维测量系统的关键技术和测量算法,为其实际应用提供一定的理论支持和实践指导。
基于结构光的人体三维扫描关键技术研究的开题报告
基于结构光的人体三维扫描关键技术研究的开题报告1.研究背景人体三维扫描技术是工业设计、医学、运动科学、数字娱乐等领域的重要应用,其中基于结构光的扫描技术因其高速、精度高、成本低等优点,已经成为目前人体三维扫描领域的主流技术之一。
本项目旨在通过对基于结构光的人体三维扫描技术的关键技术进行研究,提高其精度和效率,推动其在现有应用领域的广泛应用。
2.研究目标(1)分析基于结构光的人体三维扫描的影响因素,建立人体模型的数学模型;(2)研究光源光照和相机参数对扫描精度的影响;(3)开发基于结构光的人体三维扫描系统;(4)对数据进行后处理,提高扫描精度。
3.研究内容(1)分析基于结构光的人体三维扫描的影响因素,建立人体模型的数学模型;该部分研究主要通过理论建模分析和仿真模拟分析,对于影响扫描精度的因素,建立数学模型,为后续的实验研究提供理论依据。
(2)研究光源光照和相机参数对扫描精度的影响;该部分研究重点在于研究光源光照和相机参数对扫描精度的影响,并从光源光照的强度、方向、相位等方面入手,优化其对人体三维扫描的影响,提高扫描质量。
该部分研究重点在发开于结构光的人体三维扫描系统,包括硬件设计和软件开发,确保系统具有高速和精度等特点。
(4)对数据进行后处理,提高扫描精度。
该部分研究主要研究人体三维扫描数据的后处理方法,包括数据配准、去噪、拼接等技术,提高扫描精度和数据质量。
4.研究方法(1)理论分析和数学建模:通过理论分析和数学建模,得出对于基于结构光的人体三维扫描关键技术的影响因素;(2)实验分析:通过实验分析,验证理论分析和数学建模的正确性,并获得实际的扫描数据;(3)算法设计:通过对实验数据的分析,优化光源光照和相机参数,提高扫描精度;(4)系统集成:将优化后的算法应用到基于结构光的人体三维扫描系统中,开发完整的系统。
5.研究意义(1)提高基于结构光的人体三维扫描系统的扫描精度和效率,为工业设计、医学、运动科学、数字娱乐等领域的应用提供更好的数据支持;(2)丰富基于结构光的人体三维扫描技术的研究成果,推进三维扫描领域的发展;(3)为基于结构光的人体三维扫描技术在应用领域的进一步推广和应用奠定基础。
一种线结构光自扫描测量系统的研究

Reerh o srp oetrsl sa nn au e n ytm sa c f i e rjco e - n igme srme t s aa fc s e
S AN aw t XI exa ,WA oya ,C N nj g H G D — e, E Z —i o NG Ha —u n HA G We -n i
C a r .agla o tr n srpoe tr h a r sc l rtdb sn pa a re a dtemi o srttdb av — CD c mea avn mee dal e rjco.T ec meawa ai ae yu ig ln rt gt n h l r oae yagla a a b a T wa
第2 7卷 第 1 0期
21 0 0年 1 月 0
机
电
ቤተ መጻሕፍቲ ባይዱ
工
程
Vo. 7 No 1 12 . O 0c . 2 0 t 01
J u n lo c a ia o ra f Me h nc l& E e t c lE g n e n lcr a n i e r g i i
部参数的标定 , 借助振镜转动驱动激光平 面完成 了对摄像机视场内被测物体的扫描 , 最终 根据激光平 面方程 和计算机二维平 面图 像信息获得 了被测物体的 维数据。试验结果证明 , 该系统能 以较快速度 实现 自由曲面的精确测量。
关 键 词 : 向 工程 ; 学 三 角 法 ; 逆 光 自扫 描 ; 维测 量 中 图分 类号 :H 4 T 3 1T 8 6 T 7 ;P 9 ;G 0 文 献 标识 码 : A 文章 编 号 :0 1 4 5 (0 0 1 03 0 10 — 5 1 2 1 )0— 0 0— 4
一种基于线结构光的汽车侧位停车的环境感知方法
Class Number TP391.41
SHEN Jie REN Mingwu (School of Computer Science and Engineering,Nanjing University of Science and Technology,Nanjing 210094)
Abstract This paper designs the field of vehicle control,especially the parking detection method involving automatic parking system. The parking light detection device includes a camera and a line structured light projector. The line structured light projector projects a light plane which intersects with the object surface of the surrounding object on the side of the traveling vehicle. If the sur⁃ face of the object is a standard plane,the line structured light forms a bright line in space,otherwise the light plane will be modulat⁃ ed by the surface shape of the object. The imaging model of the line structured light measurement system is established based on the machine vision technology which the image of the light bar is photographed by using the camera from the other direction different from the projection direction and the position change of the pixel is detected in the light bar as well as combining with the camera cal⁃ ibration technology,image feature extraction technology and other methods to achieve parking environment perception. Compared with the existing parking detection based on Lidar and ultrasonic radar,it can effectively improve the detection accuracy of automat⁃ ic parking space. In addition,the cost is lower,and the application range is wide.
基于结构光视觉引导的工业机器人定位系统设计分析
基于结构光视觉引导的工业机器人定位系统设计分析研究提出了基于线结构光视觉引导下的工业机器人定位系统,其视觉传感器选择的是线结构光自扫描测量装置,在振镜转动作用下完成激光平面对目标对象的扫描,进而得到目标对象处于相机坐标系下的三维位姿。
然后采用机器人手眼关系联合工具坐标系标定法,对随机位姿目标对象进行工业机器人三维定位,结果证实该系统定位精度高、灵活性强,稳定性高,能够满足工业现场需求。
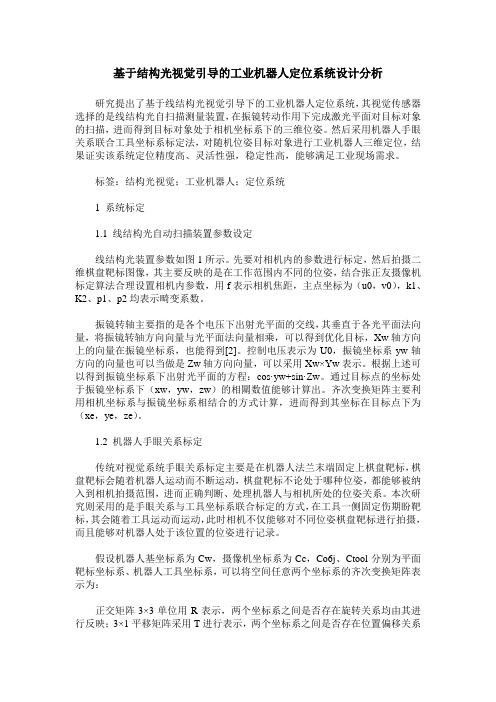
标签:结构光视觉;工业机器人;定位系统1 系统标定1.1 线结构光自动扫描装置参数设定线结构光装置参数如图1所示。
先要对相机内的参数进行标定,然后拍摄二维棋盘靶标图像,其主要反映的是在工作范围内不同的位姿,结合张正友摄像机标定算法合理设置相机内参数,用f表示相机焦距,主点坐标为(u0,v0),k1、K2、p1、p2均表示畸变系数。
振镜转轴主要指的是各个电压下出射光平面的交线,其垂直于各光平面法向量,将振镜转轴方向向量与光平面法向量相乘,可以得到优化目标,Xw轴方向上的向量在振镜坐标系,也能得到[2]。
控制电压表示为U0,振镜坐标系yw轴方向的向量也可以当做是Zw轴方向向量,可以采用Xw×Yw表示。
根据上述可以得到振镜坐标系下出射光平面的方程:cos·yw+sin·Zw。
通过目标点的坐标处于振镜坐标系下(xw,yw,zw)的相關数值能够计算出。
齐次变换矩阵主要利用相机坐标系与振镜坐标系相结合的方式计算,进而得到其坐标在目标点下为(xe,ye,ze)。
1.2 机器人手眼关系标定传统对视觉系统手眼关系标定主要是在机器人法兰末端固定上棋盘靶标,棋盘靶标会随着机器人运动而不断运动,棋盘靶标不论处于哪种位姿,都能够被纳入到相机拍摄范围,进而正确判断、处理机器人与相机所处的位姿关系。
本次研究则采用的是手眼关系与工具坐标系联合标定的方式,在工具一侧固定伤期盼靶标,其会随着工具运动而运动,此时相机不仅能够对不同位姿棋盘靶标进行拍摄,而且能够对机器人处于该位置的位姿进行记录。
基于交比不变的线结构光标定方法研究
基于交比不变的线结构光标定方法研究1. 引言1.1 背景介绍在计算机视觉领域,线结构光技术被广泛应用于三维重建、物体识别和姿态估计等领域。
通过投射结构光,可以在被测物体表面形成特殊的光斑,从而利用相机进行观测和分析。
由于相机和投影仪之间的几何关系不确定性以及环境光干扰等因素的影响,线结构光的标定一直是一个挑战性问题。
传统的线结构光标定方法通常基于投影模型和相机模型进行标定,需要复杂的操作过程和大量的标定数据,同时对标定板的表面特征要求较高。
为了解决这些问题,基于交比不变的线结构光标定方法应运而生。
这种方法基于线结构光中线条的交比关系,在保证系统几何约束不变的情况下,通过简化标定过程和提高标定精度,极大地提高了线结构光的标定效率和准确性。
本文将深入研究基于交比不变的线结构光标定方法原理及实现步骤,并设计实验进行验证和结果分析。
将讨论该方法的优缺点以及与相关工作的比较,希望能为线结构光在计算机视觉领域的进一步应用提供参考和借鉴。
1.2 研究意义研究意义:线结构光是一种常用的三维形貌测量方法,在工业领域具有广泛的应用。
而线结构光的精准度直接取决于其标定方法的准确性,因此研究基于交比不变的线结构光标定方法具有重要的实用价值和理论意义。
基于交比不变的线结构光标定方法能够提高测量系统的精准度和稳定性,从而提高产品质量和生产效率。
通过准确标定,可以减小系统误差,确保所获取的三维形貌数据准确可靠,进一步提高产品加工的精度和一致性。
研究基于交比不变的线结构光标定方法还可以为多视角、多传感器等复杂环境下的线结构光测量提供更可靠的标定技术支持。
这对于在实际工程应用中需要进行多角度观测和复杂结构测量的情况下具有重要意义,有利于提高测量系统的适应性和稳定性。
2. 正文2.1 基于交比不变的线结构光标定方法原理基于交比不变的线结构光标定方法是一种利用交比不变性质进行相机标定的方法。
在相机标定中,我们需要确定相机的内参数和外参数,以便进行准确的三维重构和姿态估计。
一种基于线结构光的五轴扫描测量系统的开题报告
一种基于线结构光的五轴扫描测量系统的开题报告一、研究背景随着制造业向高精度、高效率、高自动化的方向发展,需要采用更为精确、稳定且高效的测量技术来满足质量和生产效率的要求。
传统的测量方法如划线、划圆等手动方式不仅精度有限,而且效率低,也存在着测量误差难以控制、数据处理复杂等问题。
因此,研发一种基于线结构光的五轴扫描测量系统,成为当前制造业测量领域的热点问题之一。
二、研究意义1.提高测量精度和效率。
线结构光技术可以实现高精度的三维测量,而五轴扫描可以大大缩短测量时间,提高测量效率。
2.应用范围广。
基于线结构光的五轴扫描测量系统可以广泛应用于汽车、航空、火箭航天、船舶等制造业领域,以及各种机械、电子、光学等行业领域。
3.推动先进制造技术的发展。
基于线结构光的五轴扫描测量系统是先进制造技术的重要组成部分,将推动我国先进制造技术的发展。
三、研究内容和方法1.研究现有线结构光测量技术。
掌握基本测量原理、算法和特点。
2.设计五轴扫描测量系统。
根据测量需求,确定系统的参数和结构,并进行实验验证。
3.测量数据处理和分析。
将测量数据输入计算机,进行数据处理和分析,得到目标物体的三维形状。
四、预期成果和进展计划1.预期成果:开发一种基于线结构光的五轴扫描测量系统,并进行实验验证,实现高精度的三维测量。
2.进展计划:第一年:研究线结构光测量技术,分析测量系统的参数和结构。
第二年:设计五轴扫描测量系统,并进行实验验证。
第三年:进行测量数据处理和分析,得到目标物体的三维形状。
五、论文框架第一章:绪论1.1 研究背景和意义1.2 国内外研究现状1.3 研究内容和方法1.4 预期成果和进展计划第二章:线结构光测量技术2.1 线结构光的基本原理和特点2.2 基于线结构光的三维重构技术2.3 常用的线结构光测量系统第三章:五轴扫描测量系统设计与实现3.1 五轴扫描测量系统的原理和参数设计3.2 五轴扫描测量系统的机械结构设计3.3 五轴扫描测量系统的控制软件设计第四章:实验与分析4.1 实验设计4.2 实验结果分析4.3 实验结论第五章:总结与展望5.1 成果总结5.2 存在的不足和改进措施5.3 展望未来参考文献。
基于线结构光的电路板锡膏三维测量系统研究的开题报告

基于线结构光的电路板锡膏三维测量系统研究的开题报告一、研究背景和意义随着电子信息技术的不断发展,电路板作为电子设备的重要组成部分,其质量对整个电子产品的性能和稳定性起着至关重要的作用。
而电路板的制造过程中,涂抹焊接用的锡膏是一个关键环节,其涂抹均匀度和厚度对电路板的运行效果和寿命有着至关重要的影响。
因此,开发一种在线实时的电路板锡膏三维测量系统可以提高电路板制造的精确度和质量,保障电路板产品的合格率和稳定性。
当前电路板锡膏涂抹的测量方法多数采用机械手或人工测量方法,但这样的方法存在缺陷:机械手需要从不同方向拍摄多张照片进行数据拼接,且测量精度受设备和环境的影响较大;人工测量时间长、耗时费力,且准确度难以保证。
因此,开发基于线结构光的电路板锡膏三维测量系统已成为当前研究的热点和难点。
二、研究内容和方法本研究将采用基于线结构光的三维测量技术,设计并开发一种电路板锡膏涂抹的在线实时测量系统。
系统将由线结构光扫描装置、相机、光源、电脑及相关软件等组成。
具体实现方法如下:1. 利用线结构光扫描装置,将光源发出的光线分割成多条以扫描电路板表面,获取电路板的三维点云数据;2. 利用相机拍摄点云数据,将点云数据转换成图像数据,通过计算和分析图像数据的位移、旋转等信息,建立电路板的三维模型;3. 利用软件对三维模型进行分析处理,获得锡膏的厚度信息和涂抹均匀度。
三、预期成果和意义本研究的主要预期成果是一套基于线结构光的电路板锡膏三维测量系统,该系统具有以下优点:1. 在线实时测量,自动化程度高,大大提高测量效率和准确度;2. 采用线结构光扫描技术,数据获取快速,精度高,且受环境干扰小;3. 分析对比电路板的三维模型,可以精确地测量锡膏涂抹的均匀程度和厚度,提高电路板生产质量。
本系统将为电路板制造过程提供一种高效、科技和精确的测量手段,同时也可推动基于线结构光的三维扫描技术的发展和应用。
一种线结构光视觉测量现场标定方法
一种线结构光视觉测量现场标定方法
WANG Chunmei;CHEN Li
【期刊名称】《机床与液压》
【年(卷),期】2018(046)022
【摘要】针对线结构光视觉测量的现场标定问题,提出一种基于直角方框共线圆点靶标的测量系统参数现场标定方法,建立标定模型,给出了所使用的直角方框共线圆点靶标的设计方案和标定步骤.标定时,只需将线结构光传感器的光平面与靶标圆点中心平面调整至同一平面,采集靶标上的特征圆点图像并提取特征圆点圆心的图像坐标,进而将其代入线结构光视觉测量标定模型,即可一次性标定出测量系统的参数.实验结果表明:标定精度可达0.001 mm,该方法较现有线结构光标定方法操作简单,可满足实际测量需求,提高了线结构光视觉现场测量效率.
【总页数】4页(P80-83)
【作者】WANG Chunmei;CHEN Li
【作者单位】
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种基于图像融合的多线结构光立体视觉测量方法 [J], 肖华军;侯力;游云霞
2.一种基于运动的线结构光视觉测量系统标定方法 [J], 刘涛;贾刚;王宗义
3.一种简化的线结构光视觉传感器现场标定方法 [J], 陈丽;梁晓琳;杨亚磊;王国斌
4.线结构光视觉传感器的现场标定方法 [J], 周富强;张广军;江洁
5.一种用于计算三维视觉测量中线结构光平面的新型算法 [J], 刘宁;卢荣胜;夏瑞雪;李琪
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
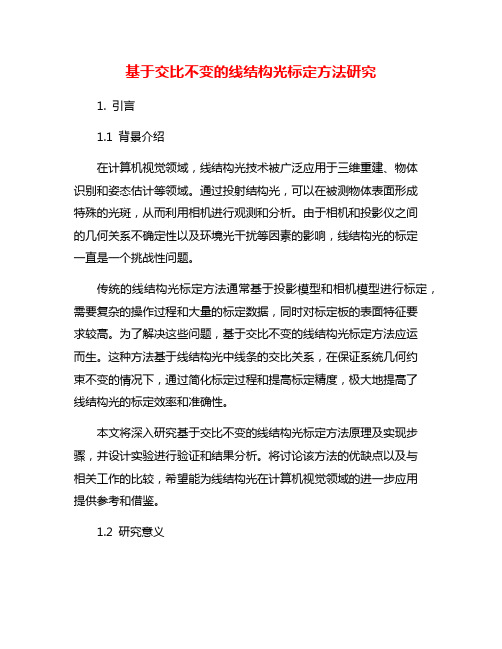
平移台 被测物 精密电控平移台 硬件系统
平 移 台 控 制 器
计 算 机
运动参数
三、主要研究内容
•1、根据测量要求,参照相关参数选择合适的机型, 包括CCD摄像机的选型、镜头的选型、扫描系统的 选型、线结构激光器选型以及总体的设计。 •2、根据总体的设计以及选择机型的参数设计与之 相配的机械结构,用于支撑激光器与摄像机。
线结构光扫描测量系统设计
答 辩 人:丁连迪 指导教师:张子淼
一、课题意义及国内外发展现状
岩石表面测量技术
压电式
激光干涉式
触针式粗糙度测量系统示意图
二、系统结ห้องสมุดไป่ตู้和数学模型
系统结构:
光条图像 线结构光激光器 USB接口 CCD摄像机 图像处理 光条中心提取 确定模型参数 数学模型 参数标定 表面点 三维坐标 软件系统