汽车底盘及四周盲区的异物识别装置的研制
汽车驾驶盲区障碍预警装置的研制

汽车驾驶盲区障碍预警装置的研制摘要:随着社会主义市场经济的发展,科技技术的不断进步,使得我国的汽车保有量逐渐的上升。
但由此带来的交通安全问题也逐渐的增多,汽车安全装置应该得到重视。
本文针对汽车驾驶盲区障碍预警装置的研制进行分析,并根据其研究方案,进行具体的研究。
前言汽车的逐渐普及,使得汽车驾驶安全问题成为交通安全的重要因素。
盲区障碍预警装置的研究对于交通安全有着重要的意义。
其是一种通过车内指示灯以及报警系统检验车速状态,并且通过车内的警报提醒驾驶员车速问题的装置。
同时能够依据光线确定车辆在某一个时间段的通行状况,通过这样的情况减少交通事故由于驾驶问题产生安全隐患。
1.盲区障碍预警系统设计方案1.1.硬件设计方案在硬件系统当中,包含主控单元、报警模块、电源模块、地感传感器模块、液晶屏显示模块、车速状况指示模块以及光照检测模块。
主控单元选择89C52单片机作为核心系统,并且自身带串口设置方便下载,并且应用过程中拥有灵活的特点。
报警模块:采用三极管蜂鸣器进行报警模块设定。
电源模块:使用具备USB标准的5伏电源进行整个系统的供电工作。
地感传感器:在传感器的设定过程中,在第一传感器像第二传感器的检测过程中,去车辆通过的时间为X,单位是秒。
传感器的固定距离是Y,单位是米。
计算的车速为w,单位是米每秒。
通过上述值可得公式W Y/x。
液晶屏显示模块:采用LCDl2864液晶屏幕,采用点阵型的分辨率。
车速状况指示模块:设定三种指示状态,分别代表不同的预警形式。
光照检测模块:通过检测分压值,使用光敏电阻以及电阻500K进行分压设计。
1.2.软件设计方案软件系统同样是设计过程中的重要的组成部分。
在盲区障碍预警当中采用模块化的形式进行软件设计工作,其主要的构成模块有主程序、ADC转换程序、地感传感器系统以及液晶显示程序进行整个模块的构成。
主控单元在进行控制的过程中应该处于循环的工作状态,便于对接受到的信号进行及时的处理,初始化调整循环程序。
车辆盲区探测系统设计方案

车辆盲区探测系统设计方案概述车辆盲区是指驾驶员无法直接监测到的区域,这些区域包括左右后视镜或车辆周围的死角。
在行驶过程中,驾驶员很容易忽略这些盲区而发生交通事故。
为了解决这个问题,车辆盲区探测系统应运而生。
本文将介绍一种车辆盲区探测系统的设计方案。
系统设计车辆盲区探测系统由两部分组成:传感器和控制器。
传感器用于探测车辆周围的物体,一旦探测到物体,则向控制器发送信号。
控制器接收到传感器的信号,并进行处理,最终向驾驶员发出警告。
下面我们分别介绍传感器和控制器的设计。
传感器设计我们选择超声波传感器作为探测车辆周围物体的传感器,主要原因是它具有以下优点:•能够测量距离,确定物体与车辆的距离•具有高精度,能够检测到较小的物体•具有低功耗,不会消耗大量电力超声波传感器可以安装在车辆的前后和左右两侧,分别用于探测车辆的盲区。
当车辆行驶过程中,传感器会不断扫描车辆周围的物体,一旦探测到物体,则向控制器发送信号。
控制器设计控制器是整个系统的核心部件,它主要负责接收传感器的信号,处理数据并最终向驾驶员发出警告。
我们采用Arduino控制板作为系统的控制器,这是因为Arduino控制板具有以下优点:•开源硬件,易于扩展和定制•使用简单,容易上手•具有丰富的外设接口,可以与各种传感器和执行器相连控制器的流程设计如下:1.初始化传感器和控制板2.循环扫描传感器3.当传感器探测到物体时,将数据传输到控制板4.控制板对数据进行处理,确定物体与车辆的距离5.如果物体距离车辆过近,则控制板向驾驶员发出警告控制器的输出一般有两种形式,一种是声音警报,可以通过蜂鸣器实现;另一种是光警报,可以通过LED灯实现。
最好同时使用两种形式的警报,以便驾驶员更加明显地感知警报信息。
总结车辆盲区探测系统是现代汽车安全保障的重要组成部分之一。
本文介绍了一种基于超声波传感器和Arduino控制板的车辆盲区探测系统的设计方案。
这个系统具有精度高、功耗低、易扩展等优点。
汽车底盘活物扫描报警装置的设计
(下转第114页)1汽车底盘活物检测的研究背景汽车车底一般是司机所注意不到的地方,如果有活物存在,那么发生意外的可能性会非常大。
近年来,由于儿童在汽车附近玩耍,车主在不知情的情况下启动汽车造成儿童伤亡的事故时有发生,另外一些小动物被突然启动的汽车压死的事件更是屡见不鲜。
目前国内外对于红外图像检测车底藏人的研究比较成熟。
国内某公司公开的一种热成像车底藏人检查装置,利用了红外热成像装置对车底进行扫描检测以及识别,可以高效、准确且简单的检测出车底藏人情况。
但是这样一个系统仅仅是设置在路面上对来往车辆进行检测,却并不是车辆本身具备这样一种检测车底活物的系统。
因此,为确保行车安全,减少事故发生,就需要一套能够实现在线监测车底状况的装置。
随着人工智能技术的成熟,这项技术可以服务于汽车行业,能准确的扫描出车辆底部及附近的状况,为安全出行提供保障。
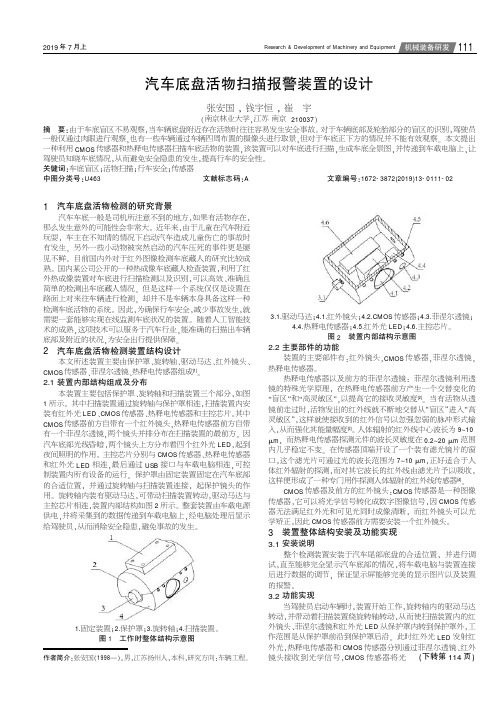
2汽车底盘活物检测装置结构设计本文所述装置主要由保护罩、旋转轴、驱动马达、红外镜头、CMOS 传感器、菲涅尔透镜、热释电传感器组成[1]。
2.1装置内部结构组成及分布本装置主要包括保护罩、旋转轴和扫描装置三个部分,如图1所示。
其中扫描装置通过旋转轴与保护罩相连,扫描装置内安装有红外光LED 、CMOS 传感器、热释电传感器和主控芯片。
其中CMOS 传感器前方自带有一个红外镜头,热释电传感器前方自带有一个菲涅尔透镜,两个镜头并排分布在扫描装置的最前方。
因汽车底部光线昏暗,两个镜头上方分布着四个红外光LED ,起到夜间照明的作用。
主控芯片分别与CMOS 传感器、热释电传感器和红外光LED 相连,最后通过USB 接口与车载电脑相连,可控制装置内所有设备的运行。
保护罩由固定装置固定在汽车底部的合适位置,并通过旋转轴与扫描装置连接,起保护镜头的作用。
旋转轴内装有驱动马达,可带动扫描装置转动,驱动马达与主控芯片相连,装置内部结构如图2所示。
整套装置由车载电源供电,并将采集到的数据传递到车载电脑上,经电脑处理后显示给驾驶员,从而消除安全隐患,避免事故的发生。
汽车底部障碍体探测器

汽车底部障碍体探测器作者:李思诺来源:《发明与创新(中学生)》 2021年第9期本期点评专家谭迪熬中国发明协会院士专家咨询工作委员会首任专家,中国发明协会中小学创造教育分会会长,科技创新教育特级教师,教育部国培计划专家库专家。
大连市第三十四中学李思诺汽车停在户外或停车场时经常有小猫、小狗前来“蹭车”,它们总喜欢待在车底,或者趴在车胎上,不易被发现。
当司机发动汽车后,发动机随即启动,小动物们被皮带卷入的案例偶有发生。
虽然一些小动物们能及时得到救治,但也难免落下残疾,还有一些小动物因此不幸丧命。
这种情况不仅会伤害小动物,还会造成车辆发动机受损。
车辆前进或倒退时,遇到的障碍物高于底盘高度,汽车就无法翻越。
若司机未及时发现障碍物而强行翻越,就会造成无法挽回的损失。
我想设计一个汽车底部障碍体探测器,它不仅能探测车辆底部的路面情况,当车前、车后有行人或障碍物时,还会发出语音警报。
当行车道路狭窄时,该设备还可自主判断汽车能否通过前方道路,警示司机谨慎行驶。
一、设计要点1.车底动物示警当发现车底有动物时,红外传感器会第一时间检测到,并通过语音模块播报警示信息。
2.车前/后障碍物示警当车前或车后的障碍物高于汽车底盘时,超声波传感器将检测障碍物的高度,并通过语音模块进行警示。
3.狭窄道路示警若前方道路过于狭窄,汽车无法安全通过时,通过语音模块进行警示。
二、硬件组成系统硬件部分以STM32 F103 ZET为控制核心,结合超声波传感器模块、红外探测模块、语音播报模块、电源等部分组成硬件电路。
综合利用传感器技术,实现汽车辅助警示系统。
三、创新点1.当系统检测到车体底部有活物时,发出语音警报提示,避免碾压事故。
2.当系统检测到车前、车后的障碍物过高时,通过语音提示车辆无法翻越。
3.通过狭窄的道路时,对路面宽度进行判断,如过于狭窄,则提示该道路无法通行,请谨慎行驶。
(指导老师:田智慧)作者心声通过本次项目的研究与开发,我的科研思维、创新能力、动手实践能力、文献阅读能力以及专业知识运用能力等方面都有不同程度的提高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 车 载 安 全 监 控 系统 的 背 景现 状 与发 展
目前对汽 车地盘 的察看 主要依 靠驾驶员上 车前 的观 察, 这样存 在很 多缺点 : 一方面 费时费力 。 人 工检查 比较 浪费时 间且相 对不方便 ; 另一 方面 , 现在 汽车的底盘形状 复杂 , 存在很 多视觉盲 区 , 肉眼观察不能准确 判断出地盘 四周的情况【 ” 。因此就需要一套 智能化 的系统来实现在线 实时监测汽车底盘 的状况闭 。未来 汽车地盘 的异物识别装 置应更加趋 向人工智 能化 .同时应 能够 自动识别 汽车底
超声 波探头通过超声 波探测周 围可能存 在的异 物 , 设置 蜂
.
汽 车 电源连 接 并可 将 底 盘 的情 况显 示 在 驾 驶 员 手机 。超 声 波 探 头 装 于 车轮 上 方 , 能 显 示 所监 测位 置 周 围 的异 物距 离 . 并 通 过 蜂 鸣 器报 警 。 本装 置 为 简化 了对 盲 区异 物 的识 别 异 物 , 可 减 少不 必要 的伤 亡事 故 , 提 高 了行 车的 安 全 性 。 关键 词 : 底 盘及 四周 盲 区 ; 异物识别 ; 超声波测距 ; 行 车 安 全
的画 面 。 2 . 2 四周 异 物 识 别
轮胎 的异物识 别 由安装在 车身 的超声波探 头 、驾驶 室 内的距离显示器和蜂 鸣器组成 , 搭建 闭环控制系统 。四
个 超 声 波 探 头 分 别 位 于 车轮 上 方 合 适 位 置 ,设 定 正 常 状
图 1 产 品 零件 布 线 图
.
要: 市场 上 流 行各 种 形 式 的 车 载 安全 监 控 系统 , 是 基 于汽 车 前 后 方 的 识 别及 报 警 。 但 是 对 于汽 车 底 盘 及 轮 胎 部 分 的 盲 区 的识 别 没 有 设 备 来 为 司机 传 递 信 息 。本 文研 究 的 盲 区异 物 识 别 装 置 主要 包括 尾 部 异 物 识 别 摄 像 头 和超 声 波探 测 装 置 。 摄 像 头装 在 车辆 底 盘 与
中: C 0为 零 度 时 的 声 波 速 度 3 3 2  ̄s ; T 为 实 际 温 度 ) 问 。
在此暂不考虑这一影 响。
3 整 体 结 构 安 装 及 功 能 实现
3 . 1 安装 说 明
摄 像 头 置 于 汽 车 尾 部 底 盘 的 适 当位 置 。 一 边 观 察 手 机
态下 的探 头与车轮顶部 的距 离值 。若有异 物位 于车轮上 方时。 探 测器所测距离便会 小于正常值 , 此 时显示屏上会 显示 异物离车轮间距 .同时报警 器发 出报警 以提醒驾驶 员车轮 四周有异物存在 , 驾驶员则可 以及时处理 。 其 中 .超声波 测距是利用其在 空气 中的传播 速度 为 已知 . 测量声波在发射后 遇到障碍物反射 回来的时 间 , 根
3 . 2 功 能 实现 打开摄像头保 护罩 , 然后将尾部异物识别摄像头 与手 机通 过无线局域 网连接 , 打开摄像头后其将车底 盘部 图像 传 至手机上 , 此时即可清 晰地 看见车底 盘部 的图像 , 以帮
助 驾 驶 员 进 行 异 物 的 识 别 判 断 。 同时 安 装 在 车 轮 上 方 的
置
驾驶员 的手机连接 。摄像头在底 盘部 的影像 同步至驾驶
员手 机中 .驾驶员即可方便地 在手机上获取 汽车底盘 的 图像信息。同时摄像头 的角度可调节 , 灵活性较强。又因 汽车底盘环境 昏暗 ,则摄像头 四周 的四个 L E D夜视灯便 起到 了照明的作用 。 即使 没有任何光线 , 也 可 以显示底 盘
车便 能处理好底盘处 的异物。
屏幕显示的图像一边调整摄像头 。 直至能够完全显示汽车
底 盘 的 情 况 。 然后 将摄 像 头保 护 罩 固定 在 摄像 头 上 方 , 关
2 汽 车 底 盘 异 物 识 别 装 置 结构 综 述
本套产 品主要 由尾部异 物识别 摄像头 、 超 声波探 头 、 摄像头保护罩 、 蜂鸣器 、 距 离显示器等组成 。 2 . 1 底 盘异物 识别 底盘 的异物识别装置 由安装在 汽车底盘 的异物识别 摄像 头 、 Wi F i 主机盒和外部保 护罩组成 ,由 A C C车载 电 源直接供电 。 与主机盒连接 , 并 由主机盒发 出 Wi F i 信 号与
l车辆与动力工程 《 V e h i c 1 e s a n d P 0 w e r E n e e r i n g I 1 2 9
汽车底盘及 四周盲 区的异物识别装置 的研制
李琪 瑶 ,李 颖 ,赵 育 泽 , 程 郅 皓 ,张任 飞
( 南京 农 业 大 学 工 学 院 , 江苏 南京 摘 2 1  ̄3 1 )
闭保护罩 。超 声波探头 以及 其控制 电路 固定 于车轮上 方
合适 位置 , 使 探头朝 向车轮。 测量探 头与车轮的直线距离 , 并 以此距离为基准 , 通过 A  ̄u i n o软件编程设 置蜂鸣器 发
出报 警声 的条件 。将 L C D液 晶显示屏 放置于驾驶室 内易 于观察 的地方 ,以便驾驶员 实时 了解异 物距离底 盘 的位
部 异 物 的 类 型 并 采 取 相 应 的 措 施 。可 以 让 驾 驶 员 不 必 下
据发射 和接 收的时 间差计 算 出发射点 到障碍物 的实 际距 离闭 。超声波传 播速度误差受 空气 的密 度所影 响 , 空气 的 密度越 高则超声波 的传播速度就越快 , 而空气 的密度 又与 温 度有 着密 切 的关 系,近似公 式 为 : C = C 0 + 0 . 6 0 7 x T  ̄ 式