一种基于粒子群优化算法的交通标志定位方法
基于粒子群优化算法的车辆路线规划研究

基于粒子群优化算法的车辆路线规划研究近年来,随着交通事业的不断发展和社会经济的快速发展,城市交通拥堵问题日益突出。
为了解决这个问题,提高城市交通的效率和舒适度,车辆路线规划成为了一个热门的研究方向。
在车辆路线规划中,粒子群优化算法被广泛应用于解决问题。
粒子群优化算法是模拟自然界中的鸟群寻食行为而发展出来的一种优化算法。
其基本思想是通过仿真粒子在解空间中的搜索和学习过程,寻找最优解。
粒子群优化算法具有简单、高效、快速收敛的特点,因此在车辆路线规划中得到了广泛的应用。
车辆路线规划的主要目标是最大化通行效率、缩短车辆行驶距离、降低交通拥堵等。
在粒子群优化算法中,需要将车辆的起点和终点作为问题的目标函数,并通过设计合理的状态转移和约束条件,最大化目标函数,并使得车辆在最短时间内到达目标地点。
在车辆路线规划中,主要需要考虑以下几个问题:一、起点和终点的确定:在车辆路线规划中,需要对车辆的起点和终点进行准确的确定。
通过确定起点和终点,可以有效地简化问题的复杂度,提高问题的解决效率。
二、路径的优化:在车辆路线规划中,需要考虑路径的优化问题。
通过优化路径,可以缩短车辆行驶的距离,降低交通拥堵,提高交通效率。
三、交通状况的考虑:在车辆路线规划中,需要考虑交通状况对车辆行驶的影响。
通过分析交通状况,可以选择最佳的路线,减少车辆的行驶时间和距离,提高交通效率,降低交通拥堵。
对于车辆路线规划问题的解决,可以采用粒子群优化算法。
该算法可以通过对车辆行驶目标的建模和合理的状态转移来优化车辆行驶路线,最终得到最优解。
同时,该算法具有高效、快速收敛、适应性强的特点,因此能够有效地解决车辆路线规划问题。
在实际应用中,需要将粒子群优化算法与实时交通数据相结合,以实现实时的车辆路线规划。
通过对实时交通数据的采集和分析,可以实时更新车辆行驶的路线,提高交通效率。
同时,可以通过不断地调整算法的参数,优化算法的性能,提高车辆路线规划的效率。
基于粒子群算法的车辆路径规划优化研究
基于粒子群算法的车辆路径规划优化研究随着人口的不断增长和城市化进程的不断深入,随之而来的是交通拥堵和不断增加的能源消耗。
因此,如何提高车辆运输的效率和减少能源消耗成为了人们关注的话题,尤其是在城市交通中。
车辆路径规划优化技术是解决这些问题的有效手段之一。
而粒子群算法,作为一种新兴的优化算法,可以在车辆路径规划优化中发挥重要作用。
本文将从车辆路径规划的原理和粒子群算法的基本概念入手,探讨基于粒子群优化算法的车辆路径规划优化的方法和取得的成果。
一、车辆路径规划原理车辆路径规划的目标是通过指定车辆的起点、终点和行驶的途中经过的中间点,确定最短路径或最短时间路径,使车辆能够在最短的时间和路程内到达目的地。
因此,在进行车辆路径规划时需要考虑的因素包括但不限于路况、交通信号灯、车流量等因素,以及车辆的速度限制、转弯半径、车宽、车高等基础特性。
传统的车辆路径规划方法通常将地图划分为一个个格子,然后针对某个车辆位置,计算从此位置出发到目的地的最短路径。
二、粒子群算法的基本概念粒子群优化算法(Particle Swarm Optimization,PSO)是一种群体智能算法,源于对鸟群捕食行为的研究。
粒子群中的每个粒子表示候选问题解,粒子的适应度值表示解的质量,整个粒子群表示整个解空间。
每个粒子基于已知的最佳个体历史信息和全局最优历史信息,通过更新自身位置和速度,来寻找最优解。
简单地说,就是通过模拟鸟群或昆虫在搜索食物时的团队协作机制,实现最优问题解的搜索和优化。
三、基于粒子群算法的车辆路径规划优化基于粒子群算法的车辆路径规划优化可以用以下步骤进行:1. 初始化粒子群。
随机生成若干粒子,每个粒子表示一条路径,每个粒子的位置表示路径节点的坐标。
2. 计算每个粒子的适应度。
适应度值可以根据两点间的距离、行驶时间、能源消耗等因素来计算,路径节点的信息则可以借助地图提供的API接口来实现。
3. 更新全局最优解和最优个体。
车辆路径问题的粒子群算法研究
车辆路径问题(Vehicle Routing Problem,简称VRP)是指在满足一定条件下,一批需要送货的客户,使得送货车辆的路线总长度最小或者送达所有客户的总成本最小的问题。
VRP的研究在物流管理、智能交通系统等领域具有重要意义。
粒子群算法(Particle Swarm Optimization,简称PSO)是一种优化算法,它模拟鸟群或鱼群中个体之间的信息共享和合作,通过群体中个体的协作来寻找最优解。
本文将探讨如何利用粒子群算法解决车辆路径问题,并对其研究进行深入分析。
一、车辆路径问题的基本概念1.1 车辆路径问题的定义车辆路径问题是指在满足一定条件下,一批需要送货的客户,使得送货车辆的路线总长度最小或者送达所有客户的总成本最小的问题。
该问题最早由Dantzig和Ramser于1959年提出,随后在实际应用中得到了广泛的关注和研究。
1.2 车辆路径问题的分类车辆路径问题根据不同的约束条件和优化目标可分为多种类型,常见的包括基本车辆路径问题、时间窗车辆路径问题、多车型车辆路径问题等。
1.3 车辆路径问题的解决方法针对不同类型的车辆路径问题,可以采用不同的解决方法,常见的包括启发式算法、精确算法、元启发式算法等。
其中,粒子群算法作为一种元启发式算法,在解决VRP问题中具有一定优势。
二、粒子群算法的基本原理2.1 粒子群算法的发展历程粒子群算法是由Kennedy和Eberhart于1995年提出的一种优化算法,其灵感来源于鸟群或鱼群中个体之间的信息共享和合作。
该算法通过模拟群体中个体的协作来寻找最优解,在解决多种优化问题方面具有良好的性能。
2.2 粒子群算法的基本原理粒子群算法模拟了鸟群或鱼群中个体之间的信息共享和合作过程,其中每个个体被称为粒子,它们以一定的速度在搜索空间中移动,并通过个体最优和群体最优来不断调整自身的位置和速度,最终找到最优解。
2.3 粒子群算法的应用领域粒子群算法在函数优化、特征选择、神经网络训练等领域都得到了广泛的应用,并在一定程度上取得了较好的效果。
粒子群优化算法在车辆路径规划中的研究
粒子群优化算法在车辆路径规划中的研究近年来,随着交通工具的普及和道路网络的扩张,人们的交通出行需求日益增长,这使得车辆路径规划成为了一个备受关注的研究领域。
车辆路径规划可以被看作是一个优化问题,即如何在最短时间内到达目的地。
在这个问题中,粒子群优化算法被应用于车辆路径规划中,以解决这个问题。
一、粒子群算法的原理粒子群优化算法是一种基于群体智能的优化算法,它是通过多个个体的合作来达到最优解的方法。
在这个算法中,每个个体被称为一个粒子,它们通过相互协作来寻找最优解,这个最优解被称为全局最优解。
在一个粒子群优化算法中,每个粒子都有一个位置和速度,它们都会根据当前情况来更新自己的位置和速度。
位置是一个向量,包含了所有可能的解,速度是一个向量,它表示了每个粒子更新位置的方向和大小。
粒子群算法的核心就是通过不断地更新位置和速度来寻找最优解,这个过程被称为迭代。
二、粒子群算法在车辆路径规划中的应用车辆路径规划可以被看作是一个优化问题,目标是在最短时间内到达目的地。
在车辆路径规划中,需要考虑的因素非常多,比如车辆的速度,路况的拥堵情况,车辆的租金等等。
这些因素往往复杂且不可控,所以车辆路径规划很难被准确地求解。
粒子群算法通过优化算法的方式解决了这个问题。
在车辆路径规划中,可以将每个粒子视为一辆车,它们的位置就是车辆的路径,速度就是车辆的行驶速度。
这些粒子以特定的方式相互作用,经过迭代的过程后,最终找到了最优解,这个最优解就是最短路径,最短时间内到达目的地。
三、粒子群算法在车辆路径规划中的优势粒子群算法有很多优势,这些优势使得它在车辆路径规划中的应用非常广泛。
首先,粒子群算法具有很强的全局寻优性质,可以在多个局部最优解中找到全局最优解。
其次,粒子群算法能够自适应地调整应用的速度,在不同的情况下都可以有很好的表现。
最后,粒子群算法不需要对目标函数进行梯度计算,因此对于复杂的目标函数,粒子群算法具有很强的鲁棒性。
四、结论总的来说,粒子群优化算法在车辆路径规划中的应用非常广泛,并且具有很强的优势。
粒子群优化算法车辆路径问题.
粒子群优化算法 计算车辆路径问题摘要粒子群优化算法中,粒子群由多个粒子组成,每个粒子的位置代表优化问题在D 维搜索空间中潜在的解。
根据各自的位置,每个粒子用一个速度来决定其飞行的方向和距离,然后通过优化函数计算出一个适应度函数值(fitness)。
粒子是根据如下三条原则来更新自身的状态:(1)在飞行过程中始终保持自身的惯性;(2)按自身的最优位置来改变状态;(3)按群体的最优位置来改变状态。
本文主要运用运筹学中粒子群优化算法解决车辆路径问题。
车辆路径问题 由Dan tzig 和Ram ser 于1959年首次提出的, 它是指对一系列发货点(或收货点) , 组成适当的行车路径, 使车辆有序地通过它们, 在满足一定约束条件的情况下, 达到一定的目标(诸如路程最短、费用最小, 耗费时间尽量少等) , 属于完全N P 问题, 在运筹、计算机、物流、管理等学科均有重要意义。
粒子群算法是最近出现的一种模拟鸟群飞行的仿生算法, 有着个体数目少、计算简单、鲁棒性好等优点, 在各类多维连续空间优化问题上均取得非常好的效果。
本文将PSO 应用于车辆路径问题求解中, 取得了很好的效果。
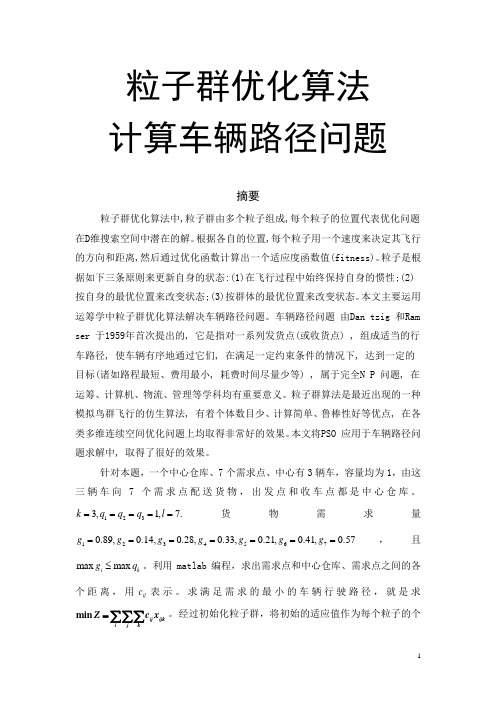
针对本题,一个中心仓库、7个需求点、中心有3辆车,容量均为1,由这三辆车向7个需求点配送货物,出发点和收车点都是中心仓库。
1233,1,7.k q q q l =====货物需求量12345670.89,0.14,0.28,0.33,0.21,0.41,0.57g g g g g g g =======,且max i k g q ≤。
利用matlab 编程,求出需求点和中心仓库、需求点之间的各个距离,用ij c 表示。
求满足需求的最小的车辆行驶路径,就是求m i n i j i j kijkZ c x =∑∑∑。
经过初始化粒子群,将初始的适应值作为每个粒子的个体最优解,并寻找子群内的最优解以及全局的最优解。
重复以上步骤,直到满足终止条件。
基于粒子群优化算法的城市交通信号优化方案研究

基于粒子群优化算法的城市交通信号优化方案研究一、简介城市交通拥堵一直是造成城市生产生活成本的因素之一。
交通信号优化方案是化解城市交通拥堵的重要手段之一,通过科学的优化方案可使城市交通顺畅,缓解道路拥堵状况。
近年来,基于粒子群优化算法的城市交通信号优化方案研究得到了广泛的关注。
本文将深入分析粒子群优化算法及其在城市交通信号优化方案中的应用。
二、粒子群优化算法简介粒子群优化算法是一种基于群体智能思维的随机搜索算法,由于其具有简单、高效和易于实现等优点,该算法已被广泛应用于生物医学、水资源管理、机器人控制、信号处理等领域。
粒子群优化算法的核心思想是通过模拟群体行为来寻找最优解,将个体看作粒子,每个粒子的速度和位置在搜索过程中不断变化,以求得全局最优解。
粒子群优化算法实现简单,容易收敛到全局最优解。
三、粒子群优化算法在城市交通信号优化方案中的应用城市交通信号灯的优化方案旨在降低城市道路通行的延误和消耗,提高道路通行效率。
根据城市交通信号优化方案的实际应用,研究人员将粒子群优化算法引入到城市交通信号灯优化方案中,并取得了显著的优化效果。
(一)粒子群优化算法在城市交通信号控制中的应用城市交通信号控制是优化城市交通的重要手段之一。
传统的城市交通信号控制方式局限性较大,无法满足城市交通需求。
因此,研究人员将粒子群优化算法应用于城市交通信号控制,以增加交通信号控制的灵活性和效率。
粒子群优化算法将城市交通信号灯周期设置为一个离散值,并根据不同周期下的道路网络交通状况确定最优的控制方案。
实验结果表明,基于粒子群优化算法的城市交通信号控制方案在减少延误和提高交通效率方面优于传统方法。
(二)粒子群优化算法在城市交通信号协调中的应用城市交通信号协调是指对不同车辆流量交叉并存的节点信号控制进行优化,以实现交叉口流畅、车辆通行的快速和安全。
传统的城市交通信号协调方式存在着时间安排的误差和复杂性。
研究人员将粒子群优化算法应用于城市交通信号协调中,根据不同车流量下的道路网络交通状况确定最优的协调方案。
基于粒子群优化算法的交通信号配时优化研究

基于粒子群优化算法的交通信号配时优化研究一、引言随着城市化进程的加速,交通拥堵问题日益突出,交通信号配时优化成为缓解交通拥堵、提高交通效率的重要手段。
然而,传统的交通信号配时方法存在效率低、无法适应实时交通状况等问题。
为了解决这些问题,本文对基于粒子群优化算法的交通信号配时优化进行研究。
二、粒子群优化算法概述粒子群优化算法是一种模拟自然界鸟群觅食行为的随机优化算法,通过模拟群体中个体之间信息的传递和交换,寻找最优解。
该算法适用于连续优化问题,并且具有全局搜索能力和较快的收敛速度。
三、基于粒子群优化算法的交通信号配时模型为了将粒子群优化算法应用于交通信号配时优化中,需要设计合适的优化目标函数和约束条件,并建立交通信号配时模型。
1. 优化目标函数交通信号配时优化的目标是使得交叉口通过交通信号的车辆数最大化,同时减少交通拥堵。
因此,可以将优化目标函数定义为交叉口通过车辆数与交通拥堵程度的综合评价指标。
2. 约束条件交通信号配时优化的约束条件包括交通流量限制、安全性要求等。
这些约束条件可以通过设置适当的变量范围和限制条件来确保交通信号配时的可行性和安全性。
3. 交通信号配时模型将上述优化目标函数和约束条件结合起来,建立交通信号配时模型。
在该模型中,交通信号相位时长、绿灯时长等作为决策变量,通过粒子群优化算法寻找最优的配时方案。
四、实验与结果分析本文选择某城市的若干个交叉口作为实验对象,将基于粒子群优化算法的交通信号配时模型应用于实际交通环境。
通过实际数据的采集和模拟实验,得到了优化后的交通信号配时方案。
实验结果表明,与传统的固定配时方案相比,基于粒子群优化算法的交通信号配时优化方案能够显著提高交通效率和减少交通拥堵。
同时,该模型具有较快的计算速度和较好的稳定性,适用于实时交通状况下的信号配时优化。
五、总结与展望本文基于粒子群优化算法的交通信号配时优化研究,对交通拥堵问题进行了探讨。
实验结果表明,该方法能够显著提高交通效率和减少交通拥堵,具有很高的应用潜力。
基于粒子群优化的车牌识别算法研究

基于粒子群优化的车牌识别算法研究作者:杨昌熙张著洪来源:《贵州大学学报(自然科学版)》2019年第06期摘要:针对环境噪声严重影响车牌的识别问题,基于字符特征向量和粒子群优化设计一种车牌识别算法。
借助垂直投影法、自适应阈值方案、方向梯度直方图法等,对车牌字符进行分割和提取字符的特征向量。
依据字符特征向量样本和支持向量机建立字符识别准确率模型,并基于粒子群优化算法建立求解该模型的车牌识别算法。
比较性的数值实验显示,该算法能有效提升车牌识别的准确率,且字符特征向量对车牌识别有极大影响。
关键词:车牌识别;方向梯度直方图;支持向量机;粒子群优化算法中图分类号:TN391文献标识码: A随着我国经济水平的不断提高,机动车拥有量的增长速度较快,道路交通拥挤现象日益突显,给交通管理带来了极大挑战。
车牌识别作为交通管理的重要组成,被广泛应用于停车场、ETC、交通违章等场景,为道路交通的管理发挥着重要作用[1-2]。
它涉及图像预处理、车牌提取、字符分割和字符识别[3]。
车牌提取方法通常包括边缘检测[4]、颜色空间法[5]、人工神经网络[6]等,其通过提取车牌颜色与边缘信息,降低噪声对车牌信息提取的影响,但车牌边缘信息模糊、附近纹理丰富及车身颜色干扰,导致定位车牌所在区域的难度加大,且高精度锁定车牌位置的研究有待深入开展。
车牌字符识别方法主要包括模板匹配法[7]、支持向量机[2]、神经网络[8]等。
前者[7]是将待识别车牌与模板进行匹配,但匹配效果易受光照强度的影响,而后二者是利用训练样本和标签对分类模型进行训练,但分类效果受参数设置的影响较为明显。
近来,智能优化算法与支持向量机(SVM)结合,并用于车牌识别的研究已得到足够重视;一些学者[2, 9-10]利用字符的灰度值作为样本,将粒子群优化(PSO)、混沌粒子群优化、人工蜂群优化等分别与SVM结合,获得求解SVM的最佳参数设置的车牌识别算法,提高车牌识别的准确率,但尚未考虑字符特征对字符识别效果的影响。
车辆路径问题的粒子群算法研究
车辆路径问题的粒子群算法研究粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,可以用于解决各种问题,包括车辆路径问题。
车辆路径问题是指在限定时间和资源条件下,确定车辆的最佳路径,使得总体成本最小化或者某个特定目标最优化。
本文将研究如何利用粒子群算法解决车辆路径问题。
粒子群算法是一种模拟鸟群觅食行为的优化算法。
在PSO算法中,将问题的解空间看作是粒子的空间,每个粒子表示一个解,整个粒子群表示一个解的集合。
每个粒子都有自己的位置和速度,并根据自身历史经验和群体中最优解的信息来更新自身的位置和速度,从而找到最优解。
对于车辆路径问题,可以将每个粒子看作是一辆车,粒子的位置表示车辆经过的路线,速度表示车辆行驶的速度。
而问题的目标函数可以表示为车辆的总体成本,包括行驶时间、燃料消耗、运输费用等。
在粒子群算法中,为了能够找到最优解,需要定义适应度函数,用于评估每个粒子的解的质量。
对于车辆路径问题,可以将适应度函数定义为总体成本的负值,即适应度越高,总体成本越低。
根据适应度函数,可以计算每个粒子的适应度,并根据适应度的大小来更新粒子的位置和速度。
在粒子的位置和速度更新过程中,需要考虑个体经验和群体经验对粒子的影响。
个体经验表示粒子自身历史上找到的最优解,而群体经验表示群体中最优解的信息。
通过综合考虑个体经验和群体经验,可以使粒子有更好的探索和开发能力。
在每次迭代过程中,需要更新每个粒子的速度和位置,并根据更新后的位置和速度计算适应度值。
通过多次迭代,粒子群算法能够逐步找到最优解,并收敛到稳定解。
尽管粒子群算法在解决车辆路径问题上有一定的研究价值,但也存在一些挑战。
首先,粒子的数量和速度的选择可能会影响算法的性能。
如果粒子数量太少,可能会导致搜索空间的覆盖不全;而粒子的速度选择过快,可能会导致搜索过程过早陷入局部最优解。
其次,适应度函数的设计也是一个关键问题。
多目标车辆路径问题的粒子群优化算法研究
多目标车辆路径问题的粒子群优化算法研究车辆路径问题是指在给定的时间窗口内,如何安排车辆的路径,使得所有的客户需求都得到满足,同时最小化车辆的行驶距离和时间。
本文介绍了一种基于粒子群优化算法的多目标车辆路径问题解决方案。
通过对算法的理论分析和实验验证,证明了该算法在解决多目标车辆路径问题方面具有较好的性能和优越的效果。
关键词:车辆路径问题、粒子群优化算法、多目标优化、时间窗口1.引言车辆路径问题是运输和物流领域的一个经典问题,其目的是为一组客户需求规划一组最优路径,使得所有的客户需求都得到满足,同时最小化车辆的行驶距离和时间。
该问题具有复杂性和大规模性,因此求解该问题是一个挑战性的任务。
传统的车辆路径问题的求解方法有贪心算法、分支定界算法和遗传算法等。
然而,这些方法只能解决单一的目标优化问题,无法同时优化多个目标,例如时间和距离等。
因此,多目标车辆路径问题的求解成为了一个研究热点。
粒子群优化算法(Particle Swarm Optimization, PSO)是一种基于群体智能的优化算法,它模拟了鸟群或鱼群的行为,将问题的解看作是粒子在搜索空间中的运动轨迹,并通过不断的迭代来寻找最优解。
PSO算法具有全局搜索能力强、易于实现等优点,因此被广泛应用于多目标优化问题的求解。
本文介绍了一种基于粒子群优化算法的多目标车辆路径问题解决方案。
首先,对车辆路径问题进行了描述,并介绍了该问题的数学模型;其次,介绍了粒子群优化算法的基本原理和流程;然后,将该算法应用于多目标车辆路径问题的求解,并进行了实验验证,证明了该算法在解决多目标车辆路径问题方面具有较好的性能和优越的效果。
2.车辆路径问题的描述和数学模型车辆路径问题是指在给定的时间窗口内,如何安排车辆的路径,使得所有的客户需求都得到满足,同时最小化车辆的行驶距离和时间。
该问题可以表示为一个带时间窗口的多旅行商问题(Multi-Depot Vehicle Routing Problem with Time Windows, MDVRPTW)。
ALPSO-SVM道路限速标志识别

一项重要研究内容,它的研究有利于避免潜在事故,提供驾 驶
PSO 是当前非 常 流 行 的 优 化 方 法 ,该 算 法 简 单、易 于 实
人 没 有 注 意 到 的 道 路 信 息 ,提 高 车 辆 的 主 动 安 全 性 能 。
现,在寻优的过程中不易陷入局部最优,能够有效地搜索全 局
道路限速标志识别主要包括两个基本的技术环节:(1)限 最优解。传统的 PSO 算法随着求解问题 复 杂 度 的 增 加,通 常
ters during the evolutionary process to coordinate the local search with the global search of the PSO algorithm.Experi- mental results show that the proposed ALPSO-SVM is superior to the traditional SVM in terms of the recognition rate, and it’s convergence performance is better than the standard PSO-SVM. Keywords Speed limit signs recognition,Particle swarm optimization,Support vector machine,Parameters optimization
速标志的检测,包括 限 速 标 志 的 定 位 及 图 像 预 处 理 ;(2)限 速 存在过早熟、全局收敛性能差等局限。近年来,研究人员 提 出
标 志 的 识 别 ,包 括 限 速 标 志 的 特 征 提 取 与 分 类 。 随 着 计 算 智 能 技 术 的 发 展 ,模 板 匹 配[1]、人 工 神 经 网 络[2]
基于粒子群优化最小二乘支持向量机的交通事故预测方法

第23卷第4期2023年8月交 通 工 程Vol.23No.4Aug.2023DOI:10.13986/ki.jote.2023.04.016基于粒子群优化最小二乘支持向量机的交通事故预测方法韦凌翔1,2,赵洪旭2,赵鹏飞3,钟栋青2,陈天昊2(1.陆军工程大学国防工程学院,南京 210007;2.盐城工学院材料科学与工程学院,江苏盐城 224051;3.北京建筑大学土木与交通工程学院,北京 102616)摘 要:为解决交通事故预测中非线性样本影响预测精度的问题,本文构建了基于粒子群算法(PSO)优化的最小二乘支持向量机(LSSVM)的交通事故预测方法.在构建交通事故数LSSVM 预测模型的基础上,采用PSO 算法优化LSSVM 的惩罚系数和核函数宽度;设计了基于粒子群优化最小二乘支持向量机的交通事故预测模型;最后以我国连续48个月的道路交通事故数据建立模型,验证了该预测方法的有效性.实验结果表明:PSO 优化LSSVM 的交通事故模型比使用经验参数的LSSVM 预测模型的预测效果更好.是准确预测交通事故的方法.关键词:交通安全;交通事故;最小二乘支持向量机(LSSVM);粒子群优化算法(PSO);预测模型中图分类号:X 951;U 491.31文献标志码:A文章编号:2096⁃3432(2023)04⁃094⁃06收稿日期:2022⁃07⁃16.基金项目:北京市博士后工作经费资助项目(No.2021⁃zz⁃111);北京建筑大学青年教师科研能力提升计划资助(No.X21066);江苏省大学生创新训练计划项目;北京建筑大学培育项目专项资金资助(X23044).作者简介:韦凌翔(1991 ),男,讲师,博士在读,研究方向为城市交通安全㊁数据挖掘与建模分析研究,E⁃mail:weilx@.通讯作者:赵鹏飞(1991 ),男,博士,讲师,研究方向为交通安全㊁交通运输规划与管理,E⁃mail:zhaopengfei@.Traffic Crash Prediction Method Using Least Squares Support Vector Machine with Particle Swarm OptimizationWEI Lingxiang 1,2,ZHAO Hongxu 2,ZHAO Pengfei 3,ZHONG Dongqin 2,CHEN Tianhao 2(1.College of Defense Engineering,Army Engineering University of PLA,Nanjing 210007,China;2.School of material science and Engineering,Yancheng Institute of Technology,Yancheng Jiangsu 224051,China;3.School of Civil and Transportation Engineering,Beijing University of Civil Engineering and Architecture,Beijing102616,China)Abstract :In order to solve the problem that nonlinear samples affect the prediction accuracy in trafficcrash prediction,this paper constructs a traffic crash prediction method based on least squares support vector machine (LSSVM)optimized by particle swarm optimization (PSO).Based on the construction of LSSVM prediction model for traffic crashes,the PSO algorithm is used to optimize the penalty coefficient and kernel function width of LSSVM.A traffic crash prediction model based on particle swarmoptimization least squares support vector machine is designed.Finally,a model is established based on road traffic crash data for 48consecutive months in China,which verifies the effectiveness of the prediction method.Experimental results show that the traffic crash model of PSO optimized LSSVM has a better prediction effect than that of LSSVM prediction model using empirical parameters.It is a method ofaccurately predicting traffic crashes. 第4期韦凌翔,等:基于粒子群优化最小二乘支持向量机的交通事故预测方法Key words:traffic safety;traffic crashes;least squares support vector machine(LSSVM);particleswarm optimization algorithm(PSO);prediction model0 引言随着城镇化的高密度的集中与开发,城市机动车保有量依然存在持续增长,小汽车出行在居民出行比例中仍旧占有较大比例,现代城市道路交通系统面临空前未有的高峰时段出行需求压力,而交通事故已经严重威胁人民生命和财产安全成为了的当今社会的主要问题[1-3].交通事故预测是一项基础性的工作,用以改善和提升城市道路交通安全环境,作为道路交通安全领域的重点研究内容之一,对于降低路面事故危害㊁改善道路安全性有着重大作用[3-4].近年来,国内外众多学者已展开较为广泛的研究,旨在能对交通事故进行科学的预测:早期用于预测交通事故的多元线性回归模型㊁Smeed模型㊁灰度预测模型等多属于统计回归模型[4-5],但是传统的回归模型无法较好地提取交通事故数据的内在相关性,无法进一步提升预测精度;随着人工智能技术的进一步开发,人们逐渐地将其融入到了交通事故预测分析中,主要代表性的交通事故预测方法有卷积神经网络模型[6]㊁相关向量机模型[7]㊁支持向量机模型[8]㊁时间序列组合预测模型[9]㊁BP神经网络[10]㊁长短期记忆网络模型[11]等.以上文献的研究表明,交通事故数据具有较为复杂的非线性特征,其产生和变化机理受到各种客观因素影响,会造成交通事故数据的趋势具有较强的波动性,因此如何运用非线性理论方法在有限交通事故数据中提取趋势特征进行预测是研究的主要方向. LSSVM算法是基于支持向量机算法加以改进而得到的,可提取小样本数据趋势特征,具有可靠的全局最优性,并在多个应用领域得到验证[12].众多研究表明LSSVM算法在样本量很小的预测中占有一定得优势,但是该算法能否预测准确却很大程度上取决于参数选择[13],针对此问题,本文利用PSO 算法的全局搜索能力对预测模型的惩罚系数和核函数宽度进行寻优,从而减少搜寻最优参数的所需时间并提升交通事故预测模型的预测效果.为此,本文将LSSVM算法与PSO算法相结合,建立基于PSO 算法优化参数的LSSVM交通事故预测模型,以我国连续48个月的道路交通事故发生数为例进行仿真计算,验证了此交通事故预测模型的可行性和高效性.1 LSSVM原理设交通事故数据集:X={(x i,y i)},i=1,2, , n;x i∈R d,y i∈R,其中,x i交通事故数输入量;y i是交通事故数输出量;n为交通事故数据个数;d为交通事故影响因素维度.支持向量机回归的基本思想是将一个非线性函数φ(x i)映射到高维特征空间,然后用函数f(㊃)在此高维特征空间内描述φ(x i)和y i之间的非线性映射关系,即:f(x i)=ωTφ(x i)+b(1)式中,ω=(ω1,ω2, ,ωn)表示惯性权重系数;b表示预先设置的阈值,通过结构风险的最小化来确定式(1)的参数ω,b.在LSSVM中,在结构风险的最小化原则(Structural Risk Minimization principle, SRM)的基础上,回归问题可转化为以下约束问题: min R=12‖ω‖2+c2∑n i=1ξ2is.t.y i=〈ω㊃φ(x i)〉+b+ξi,i=1,2, ,n s.t.ξi≥0,i=1,2, ,ìîíïïïïn(2)式中,c为惩罚因子,控制对样本超出计算误差的惩罚程度;‖ω‖2用来控制模型的复杂程度;ξi为松弛因子.求解式(2)的优化问题,可将有约束问题通过建立拉格朗日函数将转化为无约束问题:L=12|ω|2+c2∑n i=1ξ2-∑n i=1αi(ωTφ(x i)+b+ξi-y i)(3)式中,αiαi(α=1,2, ,n)表示拉格朗日乘数,最优的拉格朗日乘数αi和阈值b可根据KKT优化条件由式(4)求得:∂l∂ω=0→ω=∑n i=1αiφ(x i)∂l∂b=0→∑n i=1αi=0∂l∂ξi=0→αi=cξi∂l∂αi=0→ωTφ(x i)+b+ξi-y i=ìîíïïïïïïïïïï0(4)将式(5)转化为矩阵形式所表示的线性方程组:59交 通 工 程2023年0e e Ω+c -1éëêêùûúúI b αéëêêùûúúN =o Y éëêêùûúúN (5)式中,e =[111 1],αN=[α1α2αn ];Y N =[y 1y 2y n ];Ω=φ(x 1)φ(x 1)φ(x 1)φ(x 2) φ(x 1)φ(x n )φ(x 2)φ(x 1)φ(x 2)φ(x 2) φ(x 2)φ(x n )︙︙ ︙φ(x n )φ(x 1)φ(x n )φ(x 2) φ(x n )φ(x n éëêêêêêùûúúúúú).基于交通事故样本集{(x i ,y i )},求解线性方程组(6),可得到交通事故预测模型的参数(b ,α1,α2, ,αn ).令K (x i ,x j )=φ(x i )φ(x j ),从而得到LSSVM 的交通事故预测模型为:y i =∑nj =1αj K (x i ,x j )+b +1c αi(6)式中,K (x i ,x j )为核函数是高纬度特征空间的内积,此核函数满足Mercer 条件.本文采用泛化能力较好的高斯径向基函数(RBF 函数)作为算法的核函数[12]见式(17):K (x i ,x j )(=exp-‖x i -x j ‖22σ)2(7)2 PSO 算法原理粒子群优化算法(PSO)是一种受鸟类觅食行为启发的全局搜索算法[14],其主要思想是:初始化一组随机粒子的位置和速度,并在一定条件下通过迭代寻找最优解.搜寻过程中将每个粒子的最佳位置定义为单个极值P best ,将当前种群中粒子的最佳位置定义为全局极值G best .在d 维搜索空间中,有m 个粒子表示问题的可能解X ={X 1,X 2, ,X m },X i ={x i 1,x i 2, ,x id }代表第i 个粒子的位置,个体适应度由LSSVM 训练中每个训练集样本产生的均方误差(MSE)表示.适应度函数构造如下:MSE =1n∑ni =1(y i -^y i )2(8)式中,y i 是交通事故实际值;^y i 是交通事故的预测值;n 是交通事故数据数.三维空间中粒子的速度定义为V i ={v i 1,v i 2,,v id },P i ={p i 1,p i 2, ,p id }代表局部最优位置P best ,P g ={p g 1,p g 2, ,p gd }代表全局最优位置G best ,根据式(9)(10)确定第i 个粒子更新后的位置和速度:V t +1i =ωV t i +C 1R 1(P t i -X t i )+C 2R 2(G t i -X t i )(9)x t +1i =x t i +v t +1i (10)式中,ω是惯性权重;t 是迭代次数;C 1和C 2是加速度常量;R 1和R 2是在[0,1]范围内两个独立的随机数.V max 和V min 分别是速度的最大㊁最小值,粒子的速度在[V min ,V max ]的范围内,在粒子的速度更新后,有:if v id <V min then v id =V min(11)if v id >V max then v id =V max (12)如果PSO 算法的迭代次数达到最大迭代次数或者适应度值达到预设的最小适应度值时,则将退出迭代周期并输出全局最优参数.3 基于PSO-LSSVM 的交通事故数预测模型对LSSVM 模型的核函数宽度和惩罚系数用PSO 算法进行优化时,首先初始化粒子群种群规模m 的大小,各个粒子位置向量X i 和速度向量V i ,然后将其带入式(13)得到本次迭代各粒子所代表的交通事故数预测值,并根据式(8)计算各粒子均方误差指标(适应值)来评价粒子的优劣,即参数向量的优劣.理想的适应度函数E 应该能反映LSSVM 在不同参数下的泛化性能,即最小化测试样本集的目标值和预测值之间的误差.将选择高斯径向基函数作为核函数带入式(6),交通事故数测模型演变为:y i =∑nj =1αj exp (-‖x i -x j ‖2/2σ2)+b +1c αi (13)模型中待定的参数为惩罚因子c 和核函数宽度σ,采用PSO 算法对惩罚系数和和函数宽度(c ,σ)进行寻优.本文给出了基于PSO 算法优化LSSVM 的交通事故数预测模型的参数算法实现步骤具体如下.步骤1:交通事故数据预处理,将前12个月交通事故数作为输入变量,第13个月的交通事故数作为输出变量,对交通事故数据进行标准化处理,选取训练样本集和预测样本集.步骤2:选择高斯径向基(RBF)函数作为交通事故数预测模型的核函数.步骤3:设置LSSVM 的参数C 和σ2,初始化PSO 算法参数:种群规模m ㊁最大迭代次数T max ㊁和最小的适应度ε㊁学习因子C 1和C 2㊁惯性权重ω㊁以及粒子的最大速度V max ,初始化各粒子的位置向量X i =(x i 1,x i 2, ,x id )㊁速度向量V i =(υi 1,υi 2, ,υid ).69 第4期韦凌翔,等:基于粒子群优化最小二乘支持向量机的交通事故预测方法步骤4:粒子i 的当前最优位置为初始位置X i =(x i 1,x i 2, ,x id ),即P i =X i (i =1,2, ,m ).步骤5:将初始粒子和交通事故数据集{(x i ,y i )}代入到模型中训练,并根据式(8)计算每个粒子的适应度值E t i.步骤6:对于单个粒子,将目前位置的适应度E t i 与其最优位置E (t -1)pi的适应度作比较,如果min (E ti,E(t -1)pi)=E t i,此时E t i=E t p,X t i=P t i ,最小适应度为E t P ,局部最优位置为P t i .步骤7:对于所有粒子,将每一个粒子局部最优位置的适应度值E t p 与全局最优位置的适应度值E (t -1)g 作比较,如果min (E t p ,E (t -1)g)=E t p ,此时E t p =E t g ,P t i =P t g ,最小适应度为E t g ,全局最优位置为P t g .步骤8:根据式(9)(10)更新下一轮粒子的位置向量X (t +1)i 和速度向量V (t +1)i ,并根据式(8)计算出各相应粒子当前的适应值E (t +1)i.重复步骤6㊁7.步骤9:终止条件判断:如果满足限制条件(E t i >ε或t >T max ),则输出c 和σ2,然后通过解码得到参数建立最佳参数组合的LSSVM 交通事故预测模型;否则返回重复执行步骤5.图1 交通事故PSO-LSSVM 预测模型的步骤4 实例验证与分析4.1 交通事故案例数据以‘中华人民共和国道路交通事故统计年报(2006 2010)“交通事故发生起数的月度数据(表1)案例,具体操作步骤如下:2006⁃01 2009⁃12共48个月的交通事故数据作为训练集,2010年12个月的交通事故数据作为测试集,模型输入输出确定后,利用PSO 算法获得模型的最优参数组合.4.2 交通事故预测模型参数设置本文选择的参考模型为LSSVM 模型,模型的初始参数组合根据经验设置.前12个月的交通事故发生数作为模型的输入变量,第13个月的交通事故发生数作为模型的输出变量,构造输入输出矩阵.PSO-LSSVM 模型的参数初始值设置如下:粒子数m =20,最大迭代次数T max =100,C 1=C 2=2,ω=0.9,V max =1,核函数宽度σ2∈(0,200),惩罚系数c ∈(0,100),适应度选为均方误差(具体详见式(8)).图3表示PSO 的迭代过程,适应度最终收敛到0.05以下.PSO -LSSVM 交通事故数预测模型的参数优化结果如图4所示,通过交通事故测试数据,得到最佳组合为:c =84.6993,σ2=0.82329.4.3 交通事故预测结果分析为对比LSSVM 交通事故预测模型与PSO -LSSVM 交通事故预测模型预测结果的差异性,本文选取相对误差(RE)分析预测差异的指标,相对误差能直观反映交通事故预测的可信度见式(14):RE =y i -^yi y i(14)79交 通 工 程2023年表1摇交通事故发生起数原始数据2006年2007年2008年2009年2010年月份事故数月份事故数月份事故数月份事故数月份事故数137765127199121654118540120772233636227420219765217849215508328219324491321558317677315711432424428278423232420214418069529734526409522421518361518199630530627376623091617956617706731590727705721598719124717796832234827949821748820035818521932386927542921675919960918752103109810261501020588102051310173651130984112758011227331121615112007512281811229121122514112265071221047图2 PSO-LSSVM 交通事故数预测模型参数优化迭代图3 基于PSO 算法的LSSVM 参数优化结果 将交通事故训练数据代入到模型中,得到交通事故预测实例中训练数据的PSO -LSSVM 模型㊁LSSVM 模型的训练数据的结果图,如图4所示.图4绘制了把训练样本数据代入PSO -LSSVM 交通事故数预测模型的预测结果图,图中横坐标表示按照2007 2009年的顺序共36个月,左边纵坐标表示交通事故发生的数量,右边纵坐标表示相对误差.图4 交通事故数训练样本预测结果对比图由图4可看出,在交通事故数据训练阶段,LSSVM 模型与PSO-LSSVM 模型的交通事故数的预测值曲线的变化趋势与交通事故数的实际值曲线的变化趋势基本吻合,PSO -LSSVM 的每个年份的相对误差趋于稳定,明显低于经验LSSVM 模型的相对误差.将交通事故预测数据代入到模型中,得到交通事故预测实例中测试数据的PSO -LSSVM 模型㊁LSSVM 模型的交通事故预测值.图5是将交通事故数据测试样本输入2种预测模型的预测结果图,横89 第4期韦凌翔,等:基于粒子群优化最小二乘支持向量机的交通事故预测方法坐标代表2010年12个月,交通事故发生起数用纵坐标表示,真实值与预测值之间的相对误差用右边纵坐标表示.图5 交通事故数测试样本集预测结果对比图由图5可看出在交通事故数据预测阶段:LSSVM 模型的最大相对误差为3.736%㊁最小相对误差为0.36%,PSO -LSSVM 模型的最大相对误差为0.382%,最小相对误差为0.028%;总体来看,PSO-LSSVM 模型的预测值与实际值有更好的拟合,相对误差都在0.5%以下,预测精度较好.综合以上分析结果可得出:PSO -LSSVM 模型的预测值曲线的拟合度明显优于LSSVM 模型,这说明PSO-LSSVM 的预测结果更加准确,预测相比经验参数的LSSVM 模型更加有效.5摇结束语1)本文构建了基于PSO 算法优化LSSVM 交通事故预测方法,该方法用于我国连续48个月的道路交通事故发生数的预测,结果表明,本文所建模型是一种可行㊁有效的交通事故数预测模型.2)本文提出的交通事故预测方法对其他城市㊁省份具有较强的适用性和可移植性,为我国城市交通安全的提升和交通事故数据分析提供了一定的数据支撑和理论基础.3)本文所预测的交通事故发生数具有不确定性和偶然性,在接下来的预测中可使用经验模态分解技术将交通事故数分解为更稳定的序列模块,这可缓解交通事故数的非线性和波动性问题,从而有利于提高预测的精度.参考文献:[1]蔡晓禹,雷财林,彭博,等.基于驾驶行为和信息熵的道路交通安全风险预估[J].中国公路学报,2020,33(6):190⁃201.[2]WEI Lingxiang,FENG Tianliu,ZHAO Pengfei,et al.Driver sleepiness detection algorithm base on relevance vector machine[J].The Baltic Journal of Road and BridgeEngineering,2021,16(1):118⁃139.[3]LIANG Mingming,ZHANG Yun,QU Guangbo,et al.Epidemiology of fatal crashes in an underdeveloped city forthe decade 2008 2017[J].International journal of injury control and safety promotion,2020,27(2):253⁃260.[4]宋英华,程灵希,刘丹,等.基于组合预测优化模型的交通事故预测研究[J].中国安全科学学报,2017,27(5):31⁃35.[5]韦凌翔,陈红,王龙飞,等.诱发道路交通事故的关键因子分析方法研究[J].交通信息与安全,2015,33(1):85⁃89,99.[6]Zheng Ming,Li Tong,Zhu Rui,et al.Traffic accident’s severity prediction:A deep⁃learning approach⁃based CNNnetwork[J].IEEE Access,2019,7:39897⁃39910.[7]王文博,陈红,韦凌翔.交通事故时间序列预测模型研究[J].中国安全科学学报,2016,26(6):52⁃56.[8]YU B,WANG Y T,YAO J B,et al.A comparison of theperformance of ann and SVM for the prediction of traffic accident duration [J ].Neural Network World Journal,2016,26(03):271⁃287.[9]谢学斌,孔令燕.基于ARIMA 和XGBoost 组合模型的交通事故预测[J].安全与环境学报,2021,21(1):277⁃284.[10]张逸飞,付玉慧.基于ARIMA⁃BP 神经网络的船舶交通事故预测[J].上海海事大学学报,2020,41(3):47⁃52.[11]李文书,邹涛涛,王洪雁,等.基于双尺度长短期记忆网络的交通事故量预测模型[J].浙江大学学报(工学版),2020,54(8):1613⁃1619.[12]张淑娟,邓秀勤,刘波.基于粒子群优化的最小二乘支持向量机税收预测模型研究[J].计算机科学,2017,44(S1):119⁃122.[13]王语园,李嘉波,张福.基于粒子群算法的最小二乘支持向量机电池状态估计[J].储能科学与技术,2020,9(4):1153⁃1158.[14]YUAN Qing,ZHAI Shihong,WU Li,et al.Blastingvibration velocity prediction based on least squares support vector machine with particle swarm optimization algorithm[J].Geosystem Engineering,2019,22(5):279⁃288.99。
基于粒子群算法的多目标优化在交通规划中的应用研究

基于粒子群算法的多目标优化在交通规划中的应用研究交通规划是现代城市发展中至关重要的一环。
如何在满足交通需求的同时提高交通效率,减少交通拥堵,提高出行的便利性成为了交通规划师们亟待解决的问题。
随着计算机技术的不断发展,基于粒子群算法的多目标优化成为了交通规划中的一种有效解决方案。
粒子群算法(Particle Swarm Optimization,PSO)是一种模拟自然界群体行为的智能优化算法。
它通过模拟鸟群或鱼群的行为,将搜索空间看作环境,粒子看作群体中的个体。
每个粒子根据自身的经验和群体的经验进行搜索,不断迭代,最终找到全局最优解。
这种算法具有收敛速度快、全局搜索能力强等优点,适用于多目标优化问题。
在交通规划中,多目标优化是一项关键任务。
交通规划师们需要在有限的资源条件下,实现尽可能多的目标。
例如,在城市道路规划中,我们希望最大限度地减少交通拥堵,同时减少出行时间、提高道路利用效率、减少交通排放量等。
而这些目标之间往往相互制约,难以完全达到。
基于粒子群算法的多目标优化可以帮助我们找到一个平衡的解决方案。
首先,我们可以利用粒子群算法来优化交通路网的布局。
在城市交通中,道路网的结构对整体的交通状况有着重要的影响。
通过将道路布设得合理且优化,可以有效减少交通拥堵和延误,提高交通效率。
粒子群算法可以帮助我们找到最佳的道路布设方案,使得交通流动更加顺畅,减少交通事故的发生。
其次,粒子群算法可以用来优化红绿灯的配时方案。
红绿灯的配时直接影响道路交叉口的交通流量和延误时间。
通过合理地设置红绿灯的信号周期和相位差,可以减少车辆的等待时间,提高交通流的通行能力。
粒子群算法可以帮助我们找到最佳的红绿灯配时方案,使得交通流动更加顺畅,减少交通拥堵。
此外,粒子群算法还可以应用于公交线路的优化。
公交线路的优化可以减少乘客的换乘时间和出行距离,提高公交的服务效率。
粒子群算法可以帮助我们找到最佳的线路设置和站点布设方案,使得公交出行更加便捷、高效。
粒子群优化算法在智能交通系统中的应用研究
粒子群优化算法在智能交通系统中的应用研究智能交通系统是指利用现代信息与通信技术,对交通流量进行监控、管理和调度,以提高交通效率、减少交通事故、改善道路畅通等。
近年来,随着城市化进程的加速和交通压力的不断增加,智能交通系统的研究变得尤为重要。
其中,粒子群优化算法作为一种基于仿生学原理的优化算法,在智能交通系统中的应用研究具有重要意义。
粒子群优化算法(Particle Swarm Optimization, PSO)是由Eberhart和Kennedy于1995年提出的,其灵感来源于鸟群觅食行为。
粒子群优化算法通过模拟鸟群中个体间的合作与竞争关系,以求解优化问题。
在智能交通系统中,粒子群优化算法可以应用于交通信号优化、路径规划、车辆调度等问题,以提高交通系统的效率和性能。
首先,粒子群优化算法在交通信号优化中的应用研究至关重要。
交通信号优化问题是指通过合理地调整交通信号的时序与配时,以最大程度地减少交通拥堵、减少排放量、提高交通效率。
传统的交通信号优化方法往往需要依赖于经验和专家知识,难以得到最优解。
而粒子群优化算法能够通过优化目标函数,得到交通信号优化的最优解。
通过将交通信号配时问题转化为一个优化问题,并结合交通流量、拥堵情况等实时数据,可以使用粒子群优化算法来寻找交通信号的最优配时方案,以最大程度地减少交通拥堵。
其次,路径规划是智能交通系统中的一个重要问题,粒子群优化算法也可以应用于路径规划中。
路径规划是指根据起点、终点和其他路况信息,确定最佳行驶路径的过程。
对于交通系统而言,最佳路径应该能够考虑交通拥堵、安全性和效率等因素。
粒子群优化算法通过模拟鸟群在搜索食物时的策略,将路径规划问题转化为一个优化问题,寻找最佳路径。
通过将交通路网划分为节点和边,将每个节点看作一个粒子,通过更新粒子的速度和位置,最终找到起点到终点的最佳路径。
在实际应用中,可以利用交通流量数据、历史路径数据等信息,结合粒子群优化算法来实现智能路径规划。
基于量子粒子群算法的车牌定位
基于量子粒子群算法的车牌定位陈玉萍【摘要】This paper presents a quantum particle swarm optimization solutions for the problem of license plate location, theifrst image of the vehicle local area adaptive illumination compensation image preprocessing, improving the quality of the picture. Then use the YCbCr color model signals a band compression to achieve illumination compensation. Basedon this paper proposes a quantum particle swarm optimization algorithm, using less number of QPSO algorithm parameters, randomness is strong, and can cover all the solution space, to ensure global convergence of the algorithm. This paper presents the results of three pieces of plate positioning images prove local feature enhancement algorithm QPSO algorithm can perform feature extraction and stable positioning works well.%提出了一种针对车牌定位问题的量子粒子群算法解决方案,先对车辆图像局部区域进行自适应光照补偿图像预处理,改善图片的质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
由于交通标志中包含许多重要的交通信息,如驾驶前方 道路状况的改变、速度限制、驾驶行为限制等,适时提供这 些信息给驾驶员, 对于保证驾驶安全, 避免交通事故的发生, 具有重要的意义。近几年来,对交通标志识别的研究获得了 广大学者的广泛关注,展开了深入的研究,并取得了一些成 果
[1]
变的三角形或圆形模板进行匹配以及由粗到精的搜索方法。 由于模板匹配的搜素空间较大,这类方法的关键在于搜索方 法的效率。由于定位算法的实时性要求很高,因此,彩色阈 值分割与模板匹配相结合的方法是一种合适的选择。 文献[7] 提出了在 HIS 颜色空间进行彩色阈值分割,然后利用遗传算 法的搜索能力,用模板匹配的方法进行定位的方法。为进一 步提高定位精度和算法的处理速度,本文提出在 YCbCr 颜色 空间进行彩色阈值分割,模板匹配中利用粒子群优化算法进 行搜索的新方法,并在优化过程的适应度函数中,结合了交 通标志具有的对称特性。为证明本文方法的有效性,进行了 仿真试验。
其中 NRT 为搜索图像与环形模板 T1 相重叠的像素数量; NR 为环形模板 T1 中环形内的总像素数; MCR 为搜索图像与对 称模板 T2 对应的对称点数量;MC 为模板 T2 对称点数量,这 里取 10。 在搜索策略上,常用的快速匹配方法包括序贯相似性检
2
t-1时刻图像
t时刻图像
t+1时刻图像
像 100 幅,选择有关的红色区域进行试验,最终得到的阈值 范围如下:
限定图像区域
1, Cb (i, j ) ∈ [105,128 ] and Cr ∈ [138,160] (3) M (i , j ) = 0, 其他
[ 5]
等人提出在 HIS 颜色空间分割出红色区域
的基础上,利用 Sobel 算子进行边缘检测,然后利用边缘信 息进行定位的方法。这类方法的定位效果主要取决于边缘检 测方法,目前所用的这些边缘分割方法受噪声影响较大。 S.H.Hsu
[ 6]
等人提出基于模板匹配的定位方法,采用大小可
基金项目: 国家 863 项目(No.863-511092);中南大学博士研究生学位论文创新选题项目(No.040122). 作则简介:张航(1966--),中南大学信息科学与工程学院副教授,硕士生导师,博士研究生,研究领域包括图像处理、过程控制以及智能控制等。通讯地 址:湖南长沙中南大学铁道校区信息科学与工程学院,邮编 410075,Tel:13574118708,E-MAIL:Zhang22@ 罗大庸(1944--),中南大学信 息科学与工程学院教授,博士生导师,主要研究领域为图像处理、控制理论及应用等。
等人
提出基于颜色表面的视觉模型 CIECAM97 的方法,它首先将 RGB 图形进行空间转换到 LCH(即 Lightness 亮度、Chroma 色度、Hue 色调)空间,利用色度和色调进行图像的分割。 这类方法考虑了人类视觉特点和环境条件,但应用时要根据 环境条件确定参数, 较为复杂。 而在基于形状的定位方法中, N.Kehtarnavaz
。
要实现交通标志的识别,最重要的是要解决交通标志的 快速定位问题,目前,常用的是基于颜色的定位和基于形状 的定位两类方法。在基于颜色的定位方法中,S.Buluswar 法实时性好,但受光照的影响较大。D.Kellmeyer
[ 3] [ 2]
等人提出在 RGB 颜色空间进行彩色阈值分割的方法,这类方 等人提 出利用多层神经网络对颜色信息进行学习的方法,这类方法 由于采用离线训练,在线定位,实时性较好,但神经网络的 构造、隐节点的个数和隐层层数的选择都依靠训练集的代表 性,而建立包含各种情况的训练集并非易事。X.Gao
[ 5,8 −9 ]
图 2 环形模板 T1
图 3 对称模板 T2
对称模板 T2 设计中,考虑程序的运行时间以及内存的大小, 关于圆心对称的对称点数选为 10 对, 并将对称点横坐标的值 从大到小存入对应模板的对称向量 TX 中,共 11 个元素,这 样,对称点的坐标分别表示为: [TX(6),TX(1)],[TX(6),TX(11)]; [TX(7),TX(2)],[TX(5),TX(10)]; [TX(8),TX(3)],[TX(4), TX(9)]; [TX(9),TX(4)],[TX(3) ,TX(8)]; [TX(10),TX(5)],[TX(2),TX(7)]; [TX(11),TX(6)],[TX(1),TX(6)]; [TX(10),TX(7)],[TX(2),TX(5)]; [TX(9),TX(8)], [TX(3),TX(4)]; [TX(8),TX(9)], [TX(4),TX(3)]; [TX(7),TX(10)],[TX(5),TX(2)]。 采用模板在区域 S 中搜索, 必须建立合适的适应度函数。 这里, 定义适应度函数 J 为搜索图像与环形模板 T1 相重叠的
Abstract: A new method for traffic sign detection is developed using Particle Swarm Optimizers (PSO) in this paper. First original image is segmented by the color of traffic sign in YCbCr color model. Then a new fitness function is presented, which considering of the symmetry of traffic sign. In the process of template matching, PSO and the proposed fitness function are employed to detect the position and size of traffic sign in real-time. The results of experiments show a superior performance compared to the previous approach either in detection speed or the detection rate. Key words: Traffic sign detection; Template matching; PSO; Color segmentation
[ 4]
2 算法思想
2.1 算法框架 交通标志的原始图像取自于车载摄像机,图像大小为 768*1024 像素,图像每隔 1 秒采集一次,本文实验对象主要 是交通标志中的禁令标志,它的特点是外围为一红色的环。 另外,根据交通标志的国家标准知,交通标志通常安装在道 路的右边,距离路边 2 到 4.5 米的位置,利用这一知识,可 将处理图像限定在原始图像的右半边,这样,可减少处理的 像素数,加快交通标志定位的处理速度。整个定位算法的流 程框图如图 1 所示。算法分两个阶段,第一阶段为彩色阈值 分割,通过图像区域限定,颜色空间转换以及阈值分割,得 到红色区域图像;第二阶段为模板匹配,通过模板库的模板 与输入图像的对应区域进行模板匹配,并利用粒子群优化算 法搜索,定位出交通标志所在区域。
测算法
[11]
、多分辨率塔形结构算法
[12 ]
、遗传算法
[7]
等,
应用本文算法的平均定位时间在 520ms,正确检测率为 95.4%;而采用文献[7]算法的平均定位时间在 980ms, 正确 检测率为 81.8%. 试验 2 主要是进行本文提出的算法与文献[7]算法在有 红色背景干扰情况下的定位情况比较。
,由于从 RBG 到 HIS 的空间转换是非线性转换,计算
量较大;另外,在 RGB 空间信号微小的变化,转换到 HIS 的 空间时色调信号会有较大的变化,呈现出不稳定的性质。由 于交通标志彩色分割时主要考虑的是图像的色度和彩度信 号,因此本文采用 YCbCr 颜色空间,它的特点是受亮度变化 的影响较小,且是二维独立分布,并在人脸检测方面获得成 功应用
J = N RT N R + M M
CT C
式中 R、G、B 为原始像素的颜色值,r、g、b 为归一化后的 颜色值,分母加 1 的目的是为了克服计算的奇异性。归一化 后,进行颜色空间的转换, 完成从 RGB 颜色空间到 YCbCr 颜色 空间转换,公式如下
[10 ]
:
Hale Waihona Puke (4)Y = 0 . 2990 r + 0 . 5870 g + 0 . 1140 b (2) Cb = − 0 . 1787 r − 0 . 3313 g + 0 . 5000 b + 128 Cr = 0 . 5000 r − 0 . 4187 g − 0 . 0813 b + 128 要进行彩色阈值分割, 须确定红色的 Cb、 Cr 分量的取值范围。 为此,选取分别在各种不同光照、环境下的实际交通标志图
[10 ]
。
首先将原始图像限定在右半区域,大小变为 768*512, 并进行亮度归一化处理:
r g b R = G B 255 • R + G + B + 1 (1)
像素数量以及搜索图像与对称模板 T2 对应的对称点数量之 和。当适应度函数取最大值时,说明交通标志与模板匹配, 表示目标已经定位,这样,对交通标志的定位问题就转化为 求适应度函数最大值问题。适应度函数 J 定义如下:
A PSO-based Method for Traffic Sign Detection
ZHANG Hang, LUO Dayong
(School of Information Science & Engineering, Central South University , Changsha, Hunan, 410075 China)
利用上式,可分割出红色区域 S。 2.3 基于 PSO 搜索算法的模板匹配 在进行匹配前,首先离线建立模板库,存入内存。模板 大小选择 N*N 个像素的正方形,根据先验知识可知,模板宽 度 N 越大,说明车载摄像机离交通标志的距离越近。而且,